Изобретение относится к системе измерения положения, а также к соответствующему способу измерения для определения отмеченного положения, в частности максимального и минимального положения, линейно подвижного направляющего элемента.
В установке ядерной энергетики, например на атомной электростанции, применяются линейно перемещаемые регулирующие (управляющие) стержни, чтобы контролировать цепные реакции процессов расщепления ядра в реакторе, при которых эмитируется излучение частиц - особенно нейтронное излучение - путем поглощения излучения. Чем дальше выдвинуты такие регулирующие стержни, которые в типовом случае расположены сконцентрированными в группы, между ядерными топливными элементами, тем большие доли излучения частиц, стимулирующего дальнейшую цепную реакцию, поглощаются, так что цепная реакция соответственно замедляется и при полностью выдвинутом положении регулирующих стержней в идеальном случае может привести к полному подавлению реакции. Состояние и протекание цепной реакции, таким образом, зависят от положений выдвижения линейно перемещаемых регулирующих стержней и определяются ими. Точное знание положения регулирующих стержней, в особенности, при соответственно максимально выдвинутых положениях, является, таким образом, релевантным для регулирования рабочего состояния и тем самым, в особенности, для безопасности.
Системы измерения положения для регулирующих стержней включают в себя, как правило, устройства для применения электромагнитных индуктивных методов измерений, при которых соответственно используется то, что изменение во времени магнитного поля в электрическом проводнике индуцирует электрическое напряжение. Подобное устройство включает в себя обычно одну или несколько первичных катушек для создания такого магнитного поля. За счет регулирующего стержня в области магнитного поля происходит изменение магнитного поля, что приводит к тому, что напряжение, индуцированное в расположенных вдоль линейного пути перемещения индукционных катушках, изменяется. Из величины напряжения индукции может определяться положение регулирующего стержня. Для определения нижнего и/или верхнего конечного положения регулирующего стержня чаще всего создаются отдельные группы катушек, измеренные сигналы которых через соответственно отдельные проводники передаются к блоку оценки. Сигнал напряжения от этих катушек дает сведения о том, достиг ли регулирующий стержень нижнего или верхнего конечного положения.
Недостаток представленной выше системы измерения положения заключается в том, что для определения положений регулирующего стержня требуется множество вторичных катушек, сигнальные проводники которых должны выводиться из внутренней области реактора - так называемой оболочки для защиты от радиоактивного излучения. В особенности, катушки для определения конечных положений регулирующего стержня требуют дополнительных измерительных проводников. Кроме того, является недостатком, что, в зависимости от фактического положения регулирующего стержня, сигнал напряжения от индукционной катушки в окрестности минимального или максимального конечных положений выдвижения регулирующего стержня непрерывно варьируется. Тем самым на основе величины сигнала напряжения можно, хотя и грубо, делать вывод о минимальном или максимальном положении выдвижения регулирующего стержня; но сигнал в ослабленной форме все еще имеется, если регулирующий стержень более не находится в своем минимальном или максимальном положении выдвижения, например, тогда, когда регулирующий стержень на некоторый участок пути выдвинут из реактора. Поэтому индуктивный способ измерения для точного и однозначного определения конечных положений часто является слишком неточным.
Первой задачей изобретения является создать систему измерения положения для определения отмеченного положения, в частности, экстремального положения, перемещаемого вдоль прямолинейного пути регулирующего стержня, для которой требуется по возможности малое количество измерительных проводников и которая является в максимально возможной степени точной и надежной. Система измерения положения должна иметь возможность, в частности, простым способом встраиваться в существующие индуктивные системы измерения положения.
Вторая задача изобретения заключается в создании способа для определения отмеченного положения, в частности, экстремального положения, перемещаемого вдоль прямолинейного пути регулирующего стержня, который является в максимально возможной степени точным и надежным.
Первая задача в соответствии с изобретением решается признаками способа по пункту 1 формулы изобретения. Согласно этому предусмотрена система измерения положения для определения экстремального положения направляющего стержня, вытянутого относительно направляющей системы вдоль прямолинейного пути и перемещаемого вдоль прямолинейного пути, с множеством сенсорных элементов и с по меньшей мере одним магнитным элементом, причем магнитный элемент выполнен с возможностью формирования магнитного поля, магнитный элемент связан с направляющим стержнем, упомянутый один или каждый сенсорный элемент соответственно внутри области детектирования выполнен с возможностью детектирования магнитного поля, напряженность которого в месте сенсорного элемента больше, чем предварительно определенное пороговое значение, и по меньшей мере один сенсорный элемент связан с направляющей системой и размещен в окрестности упомянутого пути.
Изобретение исходит из идеи, с помощью магнитного элемента связывать магнитное поле с направляющим стержнем в зависимости от места и посредством детектирования магнитного поля посредством внешнего, стационарно связанного с направляющей системой сенсорного элемента, определять соответствующее положение направляющего стержня относительно направляющей системы. В частности, таким способом могут определяться дискретные значения положения направляющего стержня, например экстремальное положение.
В качестве положения направляющего стержня определяется положение опорной точки, стационарной относительно направляющего стержня, причем опорная точка относительно прямолинейного пути имеет точно одну координату места. Предпочтительным образом, опорная точка выбирается в месте направляющего стержня, в котором расположен любой, но постоянно выбранный магнитный элемент. При только одном магнитном элементе этот выбор однозначен. Данный специальный выбор опорной точки не представляет никаких ограничений общности. При другом выборе опорной точки измеренные значения положения, по сравнению со значениями при специальном выборе опорной точки, сдвигаются на постоянную длину, которая задается расстоянием между магнитным элементом и опорной точкой.
Кроме того, определение положения является однозначным, так как сенсорный элемент тогда и только тогда реагирует с целью определения, когда в области детектирования имеется магнитное поле, напряженность которого в месте сенсорного элемента больше, чем пороговое значение. При изменении положения направляющего стержня, которое больше, чем пространственная резкость разделения сенсорного элемента, таким образом, не происходит непрерывной подачи сигнала сенсорного элемента. Более того, обеспечивается возможность получения надежных двоичных сведений типа «конечное положение достигнуто: да/нет?».
Если несколько сенсорных элементов установлено в одном и том же месте направляющей системы, то соответственно повышается степень избыточности определения положения. Поэтому соответствующая изобретению система измерения положения принципиально может выполняться с высокой степенью избыточности и соответственно этому является надежной. Вообще при этом необходимо учитывать обусловленный системой недостаток, заключающийся в большом количестве проводников.
Кроме того, соответствующая изобретению система измерения положения может комбинироваться с известными системами для измерения положения, в частности, с системами для применения индуктивных методов измерений, причем, в особенности, могут применяться уже существующие сигнальные проводники (многократное использование).
Предпочтительным образом магнитный элемент выполнен как постоянный магнит. Для постоянных магнитов - иначе, чем для образующих электромагниты катушек, - не требуются электрические проводники, которые как дополнительные проводники должны выводиться на или в направляющем стержне из оболочки для защиты от радиоактивного излучения. Число возможных дополнительных проводников, которые должны для системы измерения положения выводиться из оболочки для защиты от радиоактивного излучения, остается ограниченным сенсорными элементами.
Рациональным образом, магнитный элемент соединен на торцевой стороне с направляющим стержнем. В подобной позиции магнитный элемент можно особенно просто соединить с направляющим стержнем, и он может - например, как постоянный магнит, - в форме магнитной пластины или магнитного кругового диска состыковываться с направляющим стержнем на торцевой стороне. Кроме того, за счет этого для сенсорного элемента на месте возможного экстремального отклонения соответствующей торцевой стороны направляющего стержня может определяться экстремальное положение направляющего стержня относительно направляющей системы.
Поэтому, согласно поставленной цели, область детектирования по меньшей мере одного сенсорного элемента регистрирует расположенный в экстремальном положении направляющий стержень.
В подходящем выполнении системы измерения положения направляющий стержень может перемещаться между минимальным положением выдвижения и максимальным движением выдвижения вдоль прямолинейного пути. Посредством соответственно локализованных сенсорных элементов могут, таким образом, определяться оба экстремальных положения выдвижения направляющего стержня.
Предпочтительным образом по меньшей мере один сенсорный элемент выполнен как бесконтактный датчик, в частности как геркон (герметизированный магнитоуправляемый контакт). Геркон имеет два контактных язычка, сердечник которых выполнен, как правило, из ферромагнитного металла. Магнитное поле в области геркона, вызванное постоянным магнитом на регулирующем стержне, приводит к притяжению обоих контактных язычков. Если напряженность магнитного поля превышает пороговое значение, то между обоими контактными язычками образуется замыкание контактов, так что электрический управляющий ток может протекать через контакт. Для улучшения проводимости и для снижения преждевременного замыкания контакта контактные язычки обычно покрываются благородным металлом, например, медью или серебром, или помещаются в вакуумированной или заполненной защитным газом стеклянной колбе. Герконы могут масштабироваться в широком диапазоне размеров, являются надежными и экономичными.
В предпочтительном варианте выполнения системы измерения положения по меньшей мере один сенсорный элемент соединен с электрическим схемным устройством, причем это схемное устройство соединено с блоком оценки и/или управления, а также включает в себя некоторое число электрических индукционных катушек. Электрическая(ие) индукционная(ые) катушка(и) выполнена(ы) для применения индуктивного процесса измерения. За счет схемотехнического соединения одна или каждая индукционная катушка может управляться и контролироваться сенсорным элементом посредством одного и того же блока управления. Таким образом, достигается высокая степень избыточности и/или высокое локальное разрешение определения положения, не требуя выведения дополнительных электрических проводников из оболочки для защиты от радиоактивного излучения.
Кроме того, схемное устройство предпочтительно содержит по меньшей мере один омический блок сопротивления, который с по меньшей мере одной индукционной катушкой образует последовательное соединение и который с по меньшей мере одним контактным датчиком образует схемный контур. Так как индукционные катушки также имеют омическое сопротивление, полное сопротивление в последовательном соединении из омического сопротивления и индукционной катушки определяется как сумма обоих сопротивлений. Так как контактный датчик с омическим блоком сопротивления образует схемный контур, омический блок сопротивления при замкнутом контактном датчике шунтируется и тем самым замыкается накоротко, так что в этом случае в измеряемое общее сопротивление входит только омическое сопротивление индукционной катушки. Топология схемного устройства отображает, таким образом, детектирование контактного датчика на прерывистое изменение сопротивления, так что, например, достижение экстремального положения направляющего стержня на основе такого скачкообразного изменения значения сопротивления может быть распознано и может измеряться простыми средствами.
В особенно подходящем дальнейшем развитии системы измерения положения схемное устройство содержит два омических блока сопротивления, которые с индукционной катушкой образуют последовательное соединение, причем соответствующее одно из обоих омических сопротивлений соединено с соответствующей одной торцевой стороной (концом соединения) индукционной катушки и содержит множество контактных датчиков, причем каждый контактный датчик с одним из омических сопротивлений образует схемный контур. В частности, имеются два контактных датчика, и каждый контактный датчик образует с точно одним омическим блоком сопротивления схемный контур. Такая топология схемы представляет специальный случай изображенной в последнем разделе схемной топологии, которая пригодна для идентификации двух различных сенсорных сигналов, например, с целью определения минимального и максимального положения направляющего стержня. В частности, оба омических блока сопротивления имеют различные значения омического сопротивления, так что по величине изменения значения полного сопротивления может распознаваться, какой из обоих контактных датчиков образует электрическое замыкание контактов. Если имеется более двух контактных датчиков, то для по меньшей мере одного омического блока сопротивления существует более одного схемного контура. Короткое замыкание омического блока сопротивления осуществляется тогда, когда только один из контактных датчиков образует электрическое замыкание контактов. Это особенно подходит для повышения степени избыточности, если области детектирования обоих контактных датчиков пересекаются.
Кроме того, рациональным образом блок управления включает в себя источник тока для питания схемного устройства электрическим постоянным током и/или включает в себя первый блок измерения для определения составляющей постоянного напряжения полного напряжения в схемном устройстве и/или включает в себя второй блок измерения для определения составляющей переменного напряжения полного напряжения в схемном устройстве. Из определенного первым блоком измерения постоянного напряжения и его временной характеристики и из введенного в схемное устройство постоянного тока, величина которого известна, может определяться значение омического сопротивления схемного устройства и его временная характеристика. В частности, при этом определяются прерывистые характеристики и тем самым результаты детектирования одного или обоих контактных датчиков. Второй блок измерения определяет, в частности, переменное напряжение, индуцированное индукционной катушкой из переменного магнитного поля. За счет этого можно, в частности, определять временную характеристику амплитуды переменного напряжения и, таким образом, делать вывод об изменении индуцированного переменного магнитного поля. Последнее является предметом индуктивного процесса измерения.
Предпочтительным образом блок управления соединен со вторым схемным устройством, причем схемное устройство включает в себя электрическую катушку и предпочтительно образует блок управления для формирования и регулирования электрического тока во втором схемном устройстве. Подобное схемное устройство пригодно, в частности, для выполнения индуктивного процесса измерения. Для этого блок управления формирует электрический переменный ток, который направляется через электрическую катушку (первичную катушку) и при этом индуцирует переменное магнитное поле.
Кроме того, электрическая катушка предпочтительно ориентирована и расположена параллельно прямолинейному пути. Например, катушка может быть выполнена для окружения прямолинейного пути, при этом индуцированное катушкой магнитное поле по существу полностью охватывает упомянутый путь.
В целесообразном выполнении системы измерения положения направляющий стержень выполнен как регулирующий стержень для ядерной технической установки, и направляющая система включает в себя направляющую трубу стабильного давления, окружающую регулирующий стержень. Подобная система измерения положения служит для - предпочтительно с избыточностью - измерения положения регулирующего стержня, в частности, для измерения и проверки конечного положения. Рациональным образом, в области конечного положения несколько контактных элементов в форме герконов соединены с замыканием контактов с внешней стороной направляющей трубы, и электрическая катушка рациональным образом окружает направляющую трубу. Положение линейно перемещаемого в направляющей трубе регулирующего стержня может индуктивно определяться посредством блока управления и схемных устройств. Достижение и сохранение конечного положения детектируется контактными элементами в форме герконов, измеряется первым схемным устройством и оценивается с помощью блока управления.
Вторая вышеназванная задача решается в соответствии с предложенным способом для определения отмеченного положения, в частности экстремального положения, направляющего стержня, вытянутого относительно направляющей системы вдоль прямолинейного пути и перемещаемого вдоль прямолинейного пути, причем с помощью магнитного элемента, связанного с одной торцевой стороны с направляющим стержнем, формируется магнитное поле и с помощью сенсорного элемента, связанного с направляющей системой, детектируется магнитное поле, предпочтительно системой измерения положения согласно первой задаче изобретения.
В особенно рациональном дальнейшем развитии способа с помощью блока управления формируется первичное переменное напряжение, переменное напряжение вводится в схемное устройство, в индукционной катушке формируется напряжение индукции, с помощью блока управления определяется омическое сопротивление схемного устройства, с помощью контактного датчика посредством магнитного поля в месте контактного датчика электрически замыкается путем замыкания контактов схемный контур, с помощью блока управления определяется изменение составляющей постоянного напряжения полного напряжения в схемном устройстве.
Достигаемые изобретением преимущества заключаются, в частности, в том, что предоставляется измерительная система, модифицированная относительно применявшихся до сих пор измерительных систем для определения положения стержней в ядерном реакторе, которая за счет многократного применения имеющихся путей передачи сигналов обходится с особенно малым числом проводников и вводов оболочки для защиты от радиоактивного излучения, и которая, в особенности, при применении контактов или датчиков на герконах, работает особенно стабильно и одновременно точно и надежно.
Далее представлен пример соответствующей изобретению системы измерения положения.
При этом на чертежах в сильно упрощенном, схематичном представлении показано следующее:
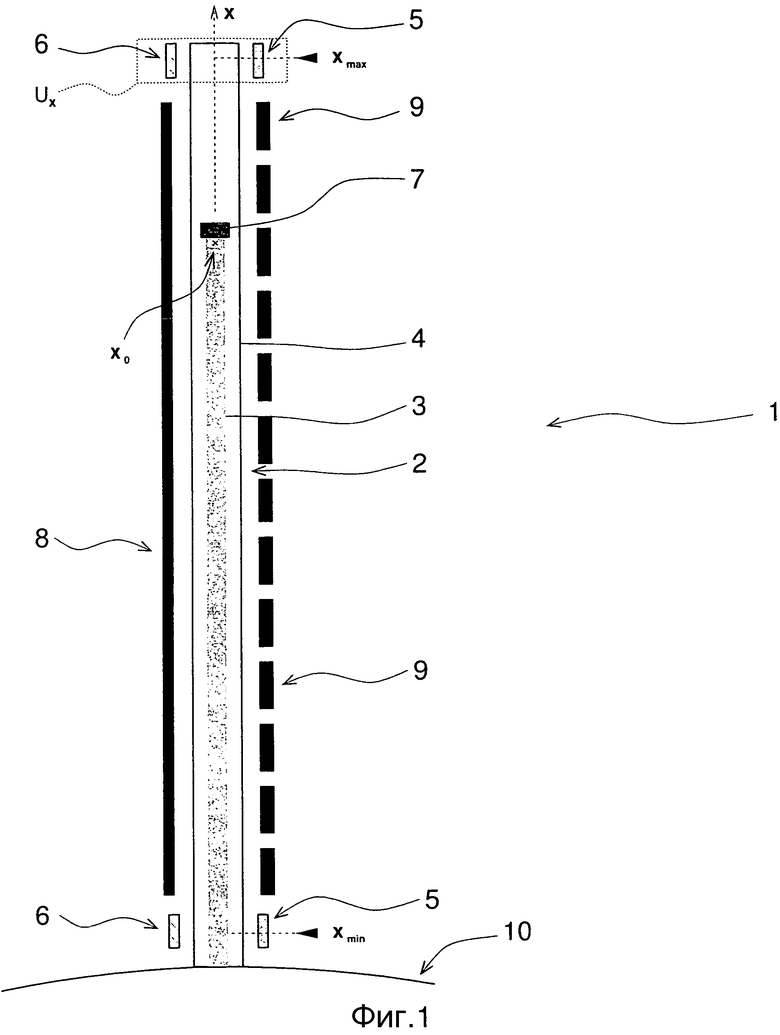
Фиг. 1 - система измерения положения для определения экстремальных положений xmin, xmax регулирующего стержня,
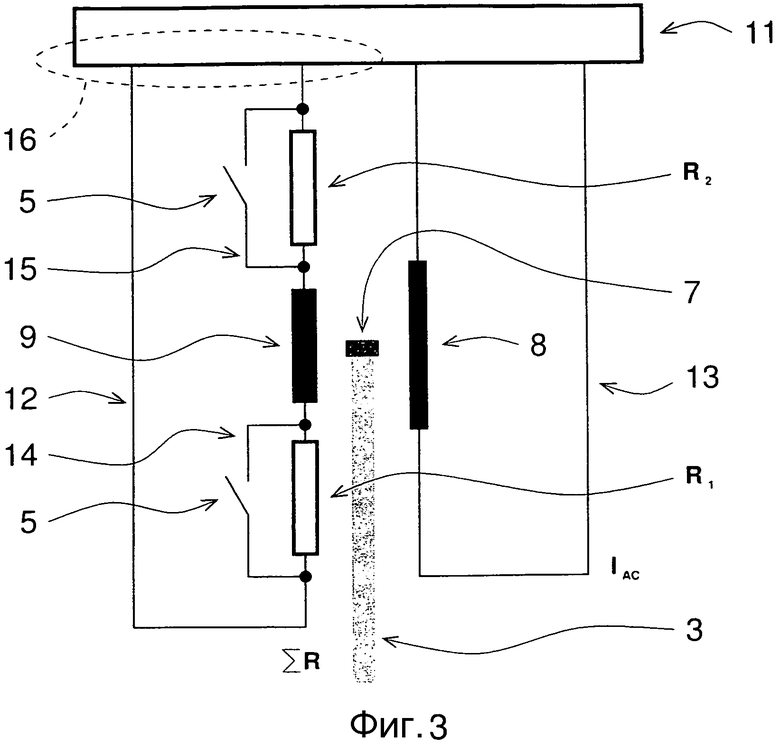
Фиг. 2 - система измерения положения по фиг. 1 с обозначенными магнитными силовыми линиями постоянного магнита, закрепленного на регулирующем стержне,
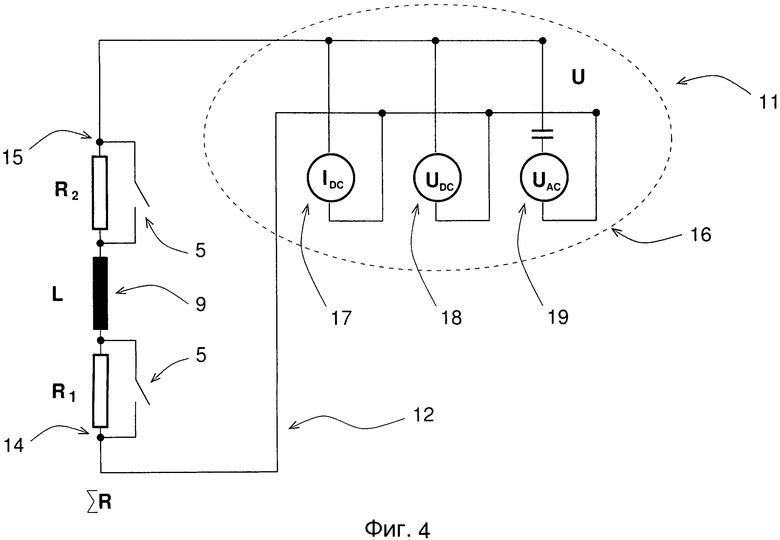
Фиг. 3 - частичный вид системы измерения положения по фиг. 1 с блоком управления и с первым и вторым относящимся к нему схемным устройством, и
Фиг. 4 - детальный вид части блока управления, а также первого относящегося к нему схемного устройства.
Соответствующие друг другу части фиг. 1-4 снабжены идентичными ссылочными позициями.
Фиг. 1 показывает систему 1 измерения положения для определения экстремальных положений xmin, xmax регулирующего стержня 3, линейно перемещаемого вдоль прямолинейного пути х между минимальным положением xmin выдвижения и максимальным положением xmax выдвижения относительно стационарной направляющей системы 2. Положение регулирующего стержня 3 идентифицируется при этом координатой опорной точки х0 относительно прямолинейного пути х. Опорная точка х0 лежит на торцевой стороне регулирующего стержня 3 и обозначает ее. Направляющая система 2 содержит направляющую трубу 4 стабильного давления, которая окружает регулирующий стержень 3. В области минимального xmin и максимального положения xmax выдвижения размещены, соответственно, первый герконовый контактный элемент 5, а также дополнительно второй герконовый контактный элемент 6. Оба герконовых контактных элемента 5 и 6 находятся в окрестности Ux прямолинейного пути х. В области опорной точки х0 на регулирующем стержне 3 расположен постоянный магнит 7. В минимальном положении xmin выдвижения регулирующего стержня 3 опорная точка х0 лежит при xmin, и в максимальном положении xmax выдвижения опорная точка х0 лежит при xmax. В обоих случаях герконовые контактные элементы 5 и 6 образуют через магнитное поле постоянного магнита электрическое замыкание контактов. Кроме того, можно видеть находящуюся под давлением стенку 10 ядерного реактора, связанную с системой 1 измерения положения.
Параллельно с направляющей трубой 4 размещена электрическая катушка 8, которая выполнена с возможностью создания переменного магнитного поля, причем переменное магнитное поле служит для индуктивного процесса измерения. Катушка 8 обозначается также как генерирующая поле первичная катушка. Кроме того, множество индукционных катушек 9, которые также обозначаются как вторичные катушки, расположены параллельно направляющей трубе 4, в которой из переменного магнитного поля индуцируется соответствующий электрический сигнал напряжения. Система катушек 8 и 9 служит известным образом для определения положения регулирующего стержня 3 на его пути перемещения в направлении х для некоторого числа промежуточных положений, лежащих между экстремальными положениями xmin, xmax, и, при необходимости, также для самих экстремальных положений xmin, xmax. Количество расположенных друг за другом в направлении х индукционных катушек 9 определяет при этом пространственное разрешение измерения положения. Наблюдение конечных положений, напротив, осуществляется разнесенно-избыточным образом или также исключительно, или, главным образом, герконовыми контактными элементами 5, или, при необходимости, посредством избыточных герконовых контактных элементов 6. При этом для минимизации необходимых проводников герконовые контактные элементы 5 особым образом включены в контур тока индукционных катушек 9 и соединены с подходящим блоком 11 оценки и/или управления, как поясняется в нижеследующем описании. Для упрощения описания при этом рассматривается только одна единственная катушка 9. Однако обобщение на несколько, например, электрически последовательно включенных индукционных катушек, как на фиг. 1 или 2, возможно без проблем.
Фиг. 2 показывает систему 1 измерения положения согласно фиг. 1 с ходом силовых линий магнитного поля Н постоянного магнита 7. Все другие детали идентичны деталям согласно фиг. 1.
На фиг. 3 представлен частичный вид системы 1 измерения положения по фиг. 1 с блоком 11 управления и с первым и вторым относящимися к нему схемными устройствами 12 и, соответственно, 13. Между обоими схемными устройствами 12 и 13 изображен регулирующий стержень 3 со связанным с ним на торцевой стороне постоянным магнитом 7, причем расположение регулирующего стержня 3 здесь является лишь иллюстративным и не соответствует реальному геометрическому расположению. Первое схемное устройство 12 содержит индукционную катушку 9, которая включена последовательно с первым омическим блоком сопротивления R1 и со вторым омическим блоком сопротивления R2, причем соответствующий один из блоков сопротивлений R1, R2 соединен с соответствующей одной торцевой стороной индукционной катушки 9. Первый омический блок сопротивления R1 и второй омический блок сопротивления R2 образуют с соответствующим герконовым контактным элементом 5 первый и, соответственно, второй схемный контур 14 и, соответственно, 15. В зависимости от того, какой из герконовых контактных элементов 5 разомкнут или замкнут - что зависит от положения регулирующего стержня 3, сравнить фиг. 1 и фиг. 2, - в первом случае схемный контур 14 разомкнут, а схемный контур 15 замкнут, во втором случае схемный контур 14 замкнут, а схемный контур 15 разомкнут, и в третьем случае первый схемный контур разомкнут, и схемный контур 15 разомкнут.
Если представленные герконовые контактные элементы 5 соответствуют таковым по фиг. 1 и фиг. 2 для экстремальных положений регулирующего стержня 3, то можно к заданному моменту времени, в зависимости от положения регулирующего стержня, реализовать только один из случаев. В первом случае блок сопротивления R1 электрически замкнут накоротко, во втором случае блок сопротивления R2 электрически замкнут накоротко, и в третьем случае никакой из блоков сопротивления R1, R2 не замкнут накоротко, так что омическое полное сопротивление ∑R последовательного соединения, в зависимости от случая, получается из суммы омических значений сопротивления индукционной катушки 9 и второго блока сопротивления R2 или первого блока сопротивления R1 или первого и второго блоков сопротивления R1, R2. Если, в частности, омические значения сопротивления обоих омических блоков сопротивления R1, R2 выбраны различающимися друг от друга, то значение суммы сопротивлений ∑R для всех случаев отличается друг от друга. Блок 11 управления имеет схемный узел 16 для определения значения суммы сопротивлений ∑R, см. фиг. 4.
Второе схемное устройство 13 содержит электрическую катушку 8, которая выполнена с возможностью обеспечения, посредством создаваемого блоком 11 управления электрического переменного тока IAC, переменного магнитного поля. Переменное магнитное поле индуцирует переменное напряжение в индукционной катушке 9, которое может оцениваться в схемном узле 16, см. фиг. 4.
Фиг. 4 показывает детальное представление схемного узла 16, который ассоциирован с блоком 11 управления и который соединен с первым схемным устройством 12, см. фиг. 3. Схемный узел 16 включает в себя источник 17 тока для предоставления постоянного тока IDC в схемное устройство 12, первый блок 18 измерений для определения составляющей UDC постоянного тока имеющегося в схемном устройстве 12 полного напряжения U, и второй блок 19 измерений для определения составляющей UAC переменного тока имеющегося в схемном устройстве 12 полного напряжения U. Другие детали соответствуют деталям на фиг.3. Индуктивность L индукционной катушки 9 обозначена отдельно. С помощью источника тока и первого блока 18 измерений определяется омическое полное сопротивление ∑R схемного устройства 12. Отсюда можно, как охарактеризовано выше, надежно детектировать достижение конечных положений xmin, xmax. С помощью второго блока 19 измерений определяется переменное напряжение UAC, которое индуцируется в индуктивности L. Тем самым можно также контролировать установленные с помощью расположения индукционной(ых) катушки(ек) 9 промежуточное(ые) положение(я) между обоими конечными положениями xmin, xmax.
За счет включения герконовых контактных элементов 5 в контур тока катушки первого схемного устройства 12 и тем самым осуществленного многократного применения уже имеющихся путей передачи сигналов обеспечивается экономия отдельных проводников для герконовых контактных элементов 5, действующих в качестве концевых переключателей или детекторов конечного положения. Можно также сказать, что известная как таковая индуктивная система определения положения с катушками 8 и 9, таким образом, без увеличения количества проводников расширяется до диверсифицированной, то есть основанной на другом функциональном принципе системы измерения конечных положений. Вместо конечных положений xmin, xmax, разумеется, могли бы контролироваться и другие отмеченные положения с помощью герконовых контактных элементов 5. Вместо герконовых контактных элементов 5, 6 могут использоваться и другие переключатели или датчики конечного положения, которые электрически шунтируют блоки сопротивлений R1, R2 по мере необходимости и в зависимости от положения регулирующего стержня 3.
Понятно, что представленные электрические блок-схемы имеют схематичный характер и что соответствующая электроника на практике могла бы иметь дополнительные компоненты, которые, однако, для представляющего здесь интерес функционального принципа имеют лишь второстепенное значение.
Перечень ссылочных позиций
1 система измерения положения
2 направляющая система
3 направляющий стержень, регулирующий стержень
4 направляющая труба
5 сенсорный элемент, контактный датчик, герконовый контактный элемент
6 герконовый контактный элемент
7 магнитный элемент, постоянный магнит
8 электрическая катушка
9 индукционная катушка
10 находящаяся под давлением стенка
11 блок управления
12 первое схемное устройство
13 второе схемное устройство
14 первый схемный контур
15 второй схемный контур
16 схемный узел
17 источник тока
18 первый блок измерений
19 второй блок измерений
Х прямолинейный путь
xmin экстремальное положение, минимальное положение выдвижения
xmax экстремальное положение, максимальное положение выдвижения
х0 опорная точка
Ux окрестность прямолинейного пути
Н магнитное поле
R1 первый омический блок сопротивления
R2 второй омический блок сопротивления
∑R полное сопротивление, сумма сопротивлений
IAC переменный ток
IDC постоянный ток
U полное напряжение
UAC переменное напряжение, составляющая переменного напряжения
UDC постоянное напряжение, составляющая постоянного напряжения
L индуктивность
Изобретение относится к измерительной технике, представляет собой систему измерения положения и предназначено для определения экстремального положения (xmin, xmax) управляющих стержней ядерной энергетической установки. Система включает канал, в котором перемещается стержень. На одном конце стержня расположен магнитный элемент, вдоль канала размещены сенсорные элементы - герконы, детектирующие магнитное поле с напряженностью выше порогового значения. Также система содержит индуктивную измерительную систему, которая включает индуктивные катушки и омический блок, образующий последовательное соединение с как минимум одной катушкой и схемное соединение с герконом. Схемным устройством шунтируется омический блок при замыкании геркона. Техническим результатом является повышение надежности и точности. 10 з.п. ф-лы, 4 ил.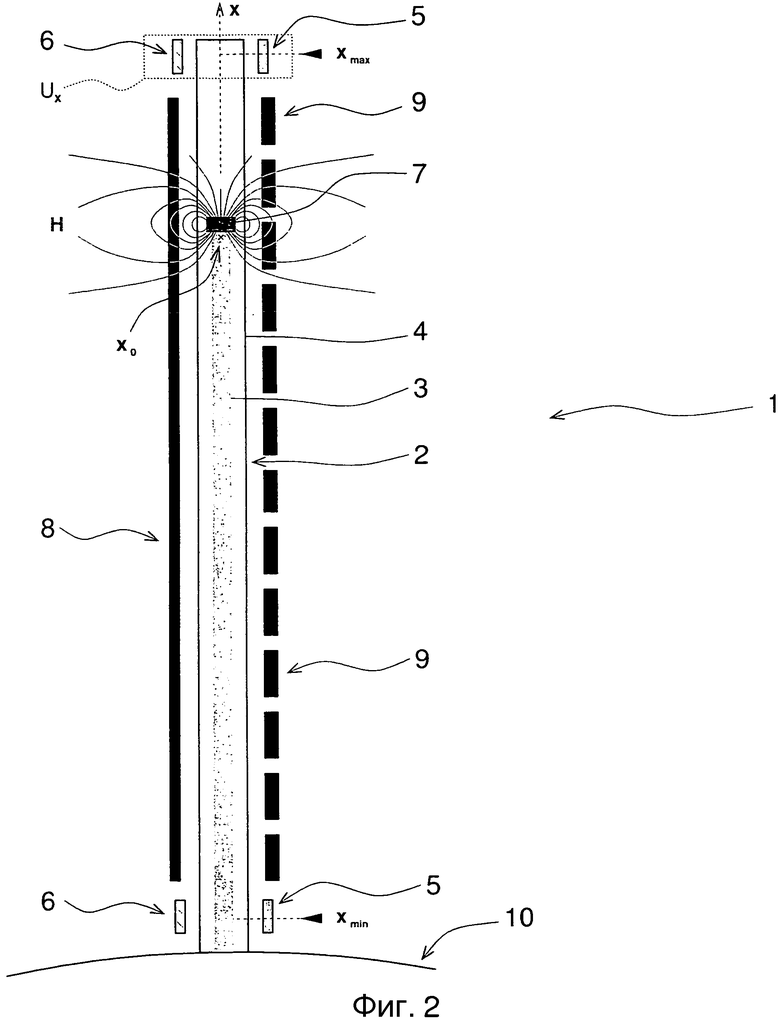
1. Система (1) измерения положения для определения отмеченного положения (xmin, xmax) направляющего стержня (3), вытянутого относительно направляющей системы (2) вдоль прямолинейного пути (х) и перемещаемого вдоль прямолинейного пути (х), с множеством герконовых контактных элементов (5) и с по меньшей мере одним магнитным элементом (7), причем
магнитный элемент (7) выполнен с возможностью формирования магнитного поля (Н),
магнитный элемент (7) связан с направляющим стержнем (3),
упомянутый один или каждый герконовый контактный элемент (5) соответственно внутри области детектирования выполнен с возможностью детектирования магнитного поля (Н), напряженность которого в месте герконового контактного элемента (5) больше, чем предварительно определенное пороговое значение, и
по меньшей мере один герконовый контактный элемент (5) связан с направляющей системой (2) и размещен в окрестности (Ux) упомянутого пути (x),
причем, кроме того, имеется индуктивная измерительная система для определения положения направляющего стержня (3), которая имеет некоторое число электрических индукционных катушек (9), и причем имеется схемное устройство (12), которое включает в себя по меньшей мере один омический блок сопротивления (R1, R2),
который с по меньшей мере одной из индукционных катушек (9) образует последовательное соединение (12) и
который с по меньшей мере одним из герконовых контактных элементов (5) образует схемный контур (14, 15), причем схемный контур (14, 15) шунтирует и тем самым замыкает накоротко омический блок сопротивления (R1, R2) при замкнутом герконовом контактном элементе (5).
2. Система (1) измерения положения по п. 1, причем магнитный элемент (7) выполнен как постоянный магнит.
3. Система (1) измерения положения по п. 1, причем магнитный элемент (7) соединен со стороны торца с направляющим стержнем (3).
4. Система (1) измерения положения по любому из пп. 1-3, причем область детектирования по меньшей мере одного герконового контактного элемента (5) регистрирует со стороны торца расположенный в отмеченном положении (xmin, xmax) направляющий стержень (3).
5. Система (1) измерения положения по любому из пп. 1-3, причем направляющий стержень (3) может перемещаться между минимальным положением (xmin) выдвижения и максимальным положением (xmax) выдвижения.
6. Система (1) измерения положения по любому из пп. 1-3, причем схемное устройство (12)
содержит два омических блока сопротивления (R1, R2), которые с индукционной катушкой (9) образуют последовательное соединение (12), причем соответствующий один из обоих омических блоков сопротивлений (R1, R2) соединен с соответствующей одной торцевой стороной индукционной катушки (9), и
содержит множество герконовых контактных элементов (5),
причем каждый герконовый контактный элемент (5) с одним из омических блоков сопротивлений (R1, R2) образует схемный контур (14, 15).
7. Система (1) измерения положения по любому из пп. 1-3 со схемным узлом (16) для определения омического полного сопротивления (∑R) схемного устройства (12).
8. Система (1) измерения положения по любому из пп. 1-3 с блоком (11) управления, который включает в себя
источник (17) тока для питания схемного устройства (12) постоянным током (IDC) и/или
первый блок (18) измерения для определения составляющей постоянного напряжения (UDC) полного напряжения (U) в схемном устройстве (12) и
второй блок (19) измерения для определения составляющей переменного напряжения (UAC) полного напряжения (U) в схемном устройстве (12).
9. Система (1) измерения положения по п. 8, причем блок (11) управления
соединен со вторым схемным устройством (13), причем это схемное устройство (13) включает в себя электрическую катушку (8), и
выполнен для создания и регулирования электрического тока (IAC) в схемном устройстве (13).
10. Система (1) измерения положения по п. 9, причем электрическая катушка (8) ориентирована и расположена параллельно прямолинейному пути (х).
11. Система (1) измерения положения по любому из пп. 1-3,
причем
направляющий стержень (3) выполнен как регулирующий стержень (3) ядерной технической установки и
направляющая система (2) включает в себя направляющую трубу (4) стабильного давления, окружающую регулирующий стержень (3).
| US 4068163 A1, 10.01.1978 | |||
| US 6571626 B1, 03.06.2003 | |||
| DE 4208888 B4, 06.06.2007 | |||
| СПОСОБ ОЧИСТКИ ЖИДКОСТЕЙ ОТ МАСЛОНЕФТЕПРОДУКТОВ | 2001 |
|
RU2202519C1 |
| US 3048818 A1, 07.08.1962 | |||
| Система контроля положения органа регулирования ядерного реактора | 1990 |
|
SU1806410A3 |

