Изобретение относится к измерительной технике и может быть использовано для определения фиксированного углового положения вращающегося вала с системой непрерывного контроля работоспособности измерительных устройств с электромагнитными датчиками.
В настоящее время электромагнитные датчики широко используются в технических разработках, т.к. обладают рядом достоинств: простота и дешевизна конструкции, механическая прочность, бесконтактный съем выходного сигнала, возможность получения достаточно высокой мощности выходного сигнала. Среди многообразия бесконтактных датчиков по неприхотливости к внешним условиям, простоте изготовления и долговечности наиболее привлекательны индукционные датчики и, в первую очередь, из-за того, что они, с одной стороны, электромагнитные, а с другой - генераторные датчики, т.е. для получения полезного сигнала не требуется дополнительное электрическое питание. Чаще всего индукционные датчики используются для определения частоты вращения отдельных узлов машин и механизмов и углового положения вращающихся частей машин и механизмов относительно индукционного датчика, который неподвижно устанавливается в наиболее рациональном месте с точки зрения решения конкретной технической задачи. Однако наличие контактных соединений, длительность эксплуатации в условиях повышенной влажности, ударных нагрузок, широкого диапазона рабочих температур может привести к возникновению неисправностей, например, межвитковое короткое замыкание в индукционной катушке, наличие обрыва в местах пайки, что неизменно влечет за собой получение недостоверной информации о физической величине, которую этот датчик измеряет (значение зазора, частота вращения, угловое положение). Наличие неисправности в датчике может привести к поломке всего агрегата, на котором установлен датчик, и, соответственно, к большим финансовым затратам по его ремонту или замене. Определение неисправного элемента в измерительном канале с последующей его заменой или последующим ремонтом часто также является непростой операцией, поэтому контроль работоспособности установленного на объекте измерительного канала на основе индукционного датчика является актуальной задачей. На основе индукционных измерителей созданы различные приборы для измерения угловых параметров.
Известен индукционный измеритель частоты вращения и углового положения коленчатого вала («Crankshaft speed and angular position detector», FR2447553 (B3) 1981-10-30, G01D 5/245, G01M 15/06, «Детектор скорости вращения и углового положения коленчатого вала»).
Известный индукционный измеритель состоит из закрепленного на коленчатом валу ферромагнитного индикаторного диска с множеством зубов, размещенных по окружности диска (аналог зубчатого колеса), двух неподвижно закрепленных индукционных катушек, одна из которых используется для определения частоты вращения коленчатого вала, а вторая - для определения углового положения индикаторного диска, на котором размещен дополнительный маркер, подключенного к первой катушке усилителя - формирователя импульсов, количество которых пропорционально частоте вращения индикаторного диска, компаратора, неинвертирующий вход которого подключен через выпрямительный диод, R-С цепочку и резистор к первой катушке, а инвертирующий вход подключен к выходу второй катушки, выход компаратора подключен к моностабильному мультивибратору для формирования прямоугольных маркировочных импульсов, при прохождении маркера под второй индукционной катушкой.
Известный индукционный измеритель работает следующим образом. Напряжение на первой катушке, индуцируемое при прохождении около нее зубов индикаторного диска в соответствии с законом Фарадея, поступает на усилитель - формирователь для определения скорости вращения индикаторного диска и через выпрямительный диод на R-С цепочку. С помощью R-С цепочки формируется пороговое напряжение, значение которого снижается с уменьшением скорости вращения индикаторного диска. Пороговое напряжение поступает на неинвертирующий вход компаратора, на инвертирующий вход которого поступает напряжение, индуцируемое на второй катушке при прохождении около нее маркера. Т.к. напряжение индуцированных паразитных импульсов, амплитуда которых зависит от скорости вращения, существенно меньше, чем напряжение на выходе второй катушки, индуцируемое при прохождении около нее маркера, то они не приводят к ложному срабатыванию компаратора и не влияют на формирование с помощью мультивибратора импульса, определяющего угловое положение маркера и, соответственно, угловое положение индикаторного диска относительно второй индукционной катушки. Снижение скорости вращения индикаторного диска приводит к снижению напряжений, формируемых двумя катушками индуктивности при прохождении около них зубов и маркера, а также и уровней порогового напряжения, формируемого R-С цепочкой, и паразитных импульсов, амплитуда которых также зависит от скорости вращения. Снижение уровня последних не приводит к ложному срабатыванию компаратора при определении углового положения вала, несмотря на то, что пороговое напряжение также уменьшилось.
К недостатку известного индукционного измерителя следует отнести отсутствие возможности непрерывного контроля его работоспособности.
Известен также индукционный измеритель, предназначенный для измерения различных параметров вращающихся деталей, в том числе и углового положения вала или маховика двигателя внутреннего сгорания («Self-powered wireless induction sensor» WO 2012158342 (A2), G01D 5/2013, G01P 21/02, G01P 3/488, H02J 7/32, 2012-11-22, «Автономный беспроводной индукционный датчик»), один из вариантов которого по совокупности существенных признаков в части использования для определения углового положения вращающегося вала является наиболее близким аналогом заявляемого индукционного измерителя.
Известный индукционный измеритель содержит жестко закрепленный на вращающемся валу индукторный диск, установленные в одном корпусе индукционный модуль, содержащий две индукционных катушки, размещенные соосно на магнитном сердечнике, состоящем из постоянного магнита с ферромагнитным полюсом, преобразователь сигнала с выхода индукционного модуля (sensing module), включающий выпрямитель с фильтром нижних частот, преобразователи напряжений, переключатели, источник питания в виде перезаряжаемой батареи, микроконтроллер (который может включать схему управления, процессор и вычислительное устройство), модуль беспроводной телеметрии и антенну для беспроводной передачи данных. Корпус измерителя с индукционным модулем и преобразователем сигнала установлен неподвижно относительно вращающегося вала в наиболее рациональном месте с точки зрения решения конкретной технической задачи.
Индукторный диск, жестко закрепленный на валу и вращающийся вместе с валом относительно корпуса измерителя с индукционным модулем и преобразователем сигнала, имеет на окружности заданное число зубов-мишеней (аналог зубчатого колеса), прохождение каждого из них под индукционным модулем изменяет зазор между ними. Одна индукционная катушка модуля используется для подзарядки перезаряжаемой батареи питания и, таким образом, для обеспечения длительной автономности работы индукционного измерителя без внешнего источника питания. Вторая катушка индукционного модуля используется для определения параметров вращающегося вала относительно индукционного модуля, в том числе и его углового положения относительно фиксированного положения корпуса измерителя с установленным в нем индукционным модулем и преобразователем сигналов.
Известный индукционный измеритель работает следующим образом. Постоянный магнит и ферромагнитный полюс индукционного модуля, создают в зазоре магнитный поток и, в соответствии с законом Фарадея, в индукционных катушках индуцируется ток при изменении пересекающего их витки магнитного потока. Прохождение каждого зуба под ферромагнитным сердечником с индукционными катушками вызывает модуляцию магнитного потока, который замыкается через соответствующий зуб и рабочий зазор на ферромагнитный сердечник. В обмотках двух индукционных катушек наводится электродвижущая сила (ЭДС) и возникают импульсы индукционного тока, которые после выпрямления с выхода одной индукционной катушки используются для подзарядки батареи и, соответственно, для питания преобразователей, микроконтроллера и передачи данных о параметрах вращающегося вала, определенных с помощью второй индукционной катушки. Количество импульсов индукционного тока за один оборот вала будет равно количеству зубов и будет соответствовать обороту вала на 360°. Если положение на валу двух рядом расположенных зубов будет отличаться по каким-либо параметрам от других (например, отличается расстояние между двумя соседними зубами или существенно отличается зазор между- одним зубом и полюсом индукционного модуля), то по этой информации можно определить угловое положение вращающегося вала относительно неподвижно установленного на объекте корпуса измерителя с индукционным модулем и преобразователем сигнала. Сигнал с выхода второй индукционной катушки, в котором заложена информация о параметрах вращающегося индукторного диска, а соответственно, и вала (в том числе и об угловом положении) обрабатывается в микроконтроллере, где определяются значения параметров, передаваемые с помощью телеметрического модуля и антенны в окружающее пространство.
К недостатку известного индукционного измерителя следует отнести отсутствие возможности непрерывного контроля его работоспособности.
Задачей, на решение которой направлено заявляемое изобретение, является расширение функциональных возможностей индукционного измерителя углового положения вращающегося вала за счет дистанционного непрерывного контроля его работоспособности.
Технический результат, получаемый при осуществлении заявляемого изобретения, заключается в возможности дистанционной проверки целостности индукционной катушки измерителя и входных электрических цепей по наличию или отсутствию формирующих импульсов в процессе измерений углового положения вращающегося вала.
Указанный технический результат при осуществлении изобретения достигается тем, что в заявляемом индукционном измерителе положения вращающегося вала, включающем жестко закрепленный на вращающемся валу 1 индукторный диск 2, связываемый с ним через магнитный поток, размещенный в корпусе измерителя 4 индукционный модуль 5, содержащий постоянный магнит 13 с ферромагнитным полюсом 14 и установленными соосно постоянному магниту 13 и ферромагнитному полюсу 14 двумя индукционными катушками 15 и 16, преобразователем сигнала 7 с фильтром нижних частот 17, и блоком регистрации 8 с микроконтроллером 9 и источником питания 10, в отличие от известного индукционного измерителя индукторный диск 2 выполнен с одним зубом-индуктором 3, а преобразователь сигналов 7 снабжен фильтром верхних частот 18, формирователем импульсов 19, формирователем тестового напряжения 20, генератором тестовых сигналов 21, стабилизатором напряжения 22, причем блок регистрации 8 соединен с преобразователем сигналов 7 четырехконтактным концевым соединителем 12 и снабжен индикатором неисправности 11, при этом выход первой - рабочей индукционной катушки 15 соединен с входами фильтров нижних 17 и верхних 18 частот, выходы которых соединены соответственно с входами формирователя импульсов 19 и формирователя тестового напряжения 20, выход формирователя импульсов 19 соединен через выходной контакт 71 преобразователя сигналов 7 и первый контакт 121 концевого соединителя 12 с первым входом 91 микроконтроллера 9, второй вход 92 которого соединен через выходной контакт 72 преобразователя сигналов 7 и второй контакт 122 концевого соединителя 12 с выходом формирователя тестового напряжения 20, выход генератора тестовых сигналов 21 соединен со второй индукционной катушкой 16, вход стабилизатора напряжения 22 соединен через выходной контакт 73 преобразователя сигналов 7 и третий контакт 123 концевого соединителя 12 с выходом источника питания 10, а выход стабилизатора напряжения 22 - с генератором тестовых сигналов 21, формирователями импульсов 19 и тестового напряжения 20, общая шина 25 соединена с одним из выводов первой 15 и второй 16 индукционных катушек, генератором тестового сигнала 21, стабилизатором напряжения 22, формирователями импульсов 19 и тестового напряжения 20, а также через выходной контакт 74 преобразователя сигналов 7 и четвертый контакт 124 концевого соединителя 12 - с источником питания 10, микроконтроллером 9 и индикатором неисправности 11.
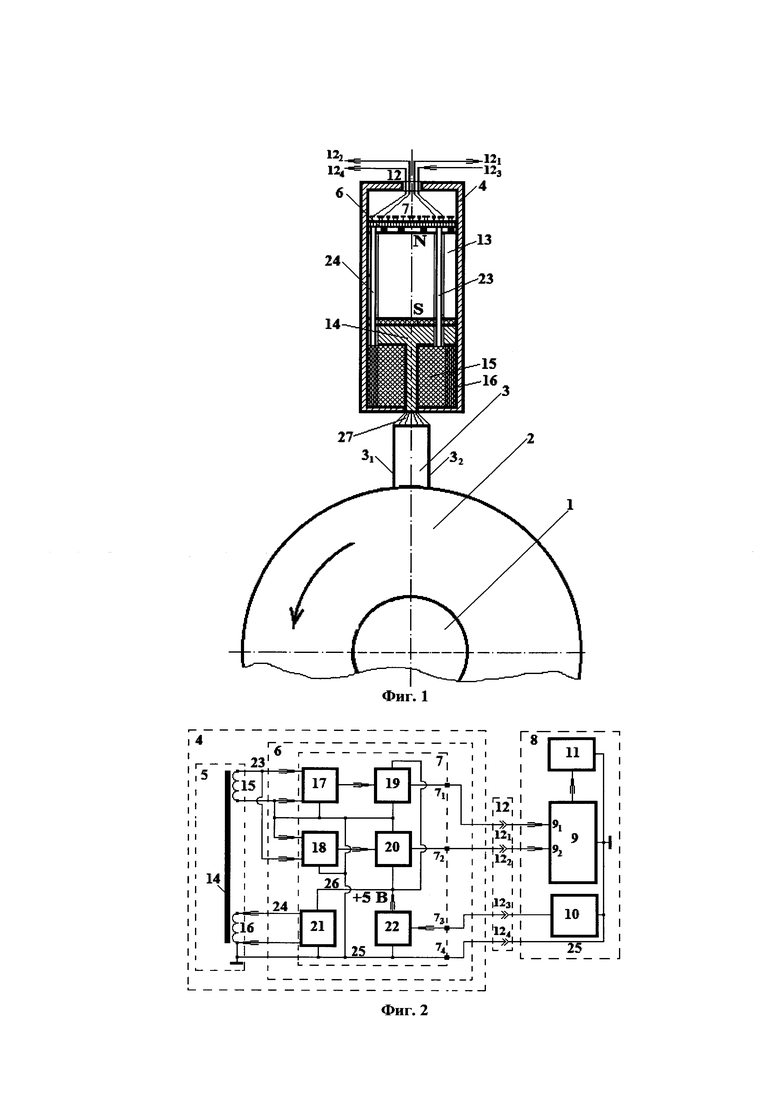
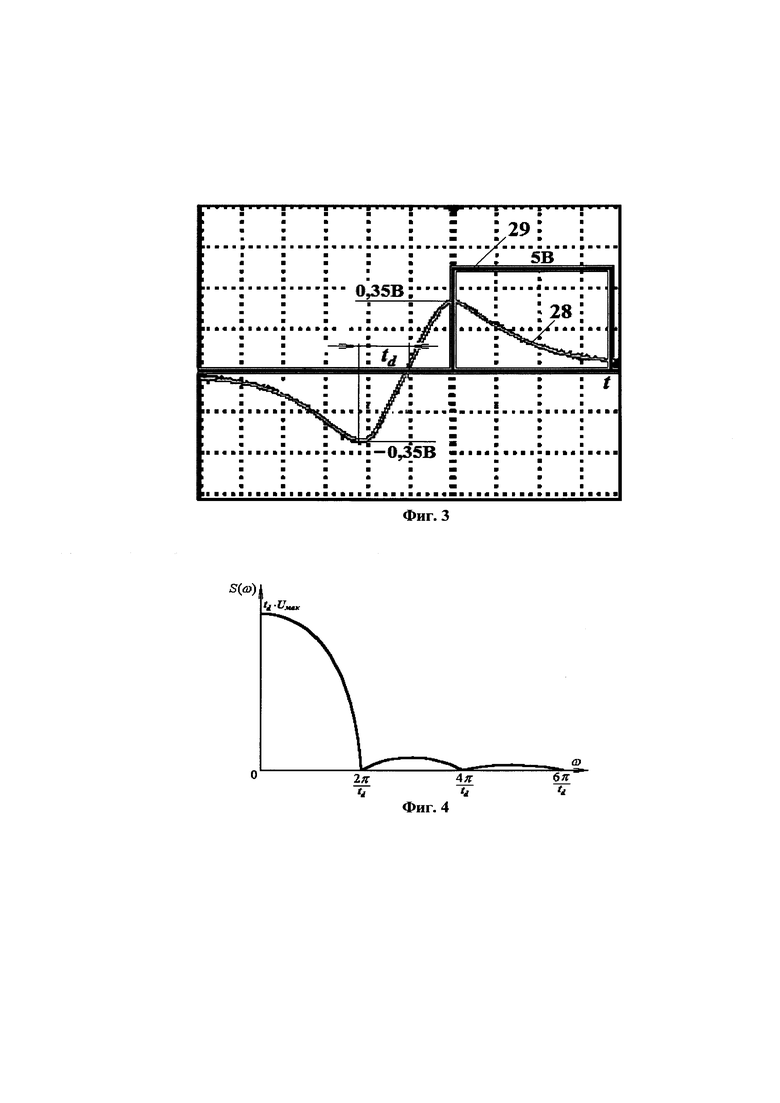
На фиг. 1 представлен корпус измерителя с размещенными в нем индукционным модулем и преобразователем сигнала, и диск с зубом-индуктором, жестко соединенный с вращающимся валом. На фиг. 2 приведена блок - схема индукционного измерителя положения вращающегося вала. На фиг. 3 приведена экспериментальная кривая выходного напряжения индукционной катушки 15 в зависимости от времени при прохождении зуба-индуктора под ферромагнитным полюсом индукционного модуля. На фиг. 4 приведена спектральная характеристика положительной половины записанной экспериментальной кривой выходного напряжения индукционной катушки 15 при прохождении зуба-индуктора 3 под ферромагнитным полюсом 14.
Индукционный измеритель положения вращающегося вала содержит жестко закрепленный на вращающемся валу 1 индукторный диск 2 с одним зубом-индуктором 3, корпус измерителя 4 с размещенными в нем индукционным модулем 5 и установленным на плате 6 преобразователем сигналов 7, блок регистрации 8, включающий микроконтроллер 9, источник питания 10 и индикатор неисправности 11. Блок регистрации 8 соединен с преобразователем сигналов 7 концевым соединителем 12. Корпус индукционного измерителя 4 устанавливается неподвижно в наиболее рациональном месте с точки зрения решения конкретной технической задачи.
Индукционный модуль 5, размещенный в корпусе измерителя 4, состоит из постоянного магнита 13, ферромагнитного полюса 14, двух индукционных катушек 15 и 16, установленных соосно на ферромагнитном полюсе 14. В состав преобразователя сигналов 7, размещенного на плате 6 в корпусе измерителя 4, входят фильтр нижних частот 17, фильтр верхних частот 18, формирователь импульсов 19, формирователь тестового напряжения 20, генератор тестовых сигналов 21, стабилизатор напряжения 22.
Индукционные катушки 15 и 16 соединены проводниками 23 и 24 с преобразователем сигналов 7, установленным на плате 6 в корпусе измерителя 4.
Выходные контакты 71 и 72 преобразователя сигналов 7 соединены через контакты 121 и 122 концевого соединителя 12 с микроконтроллером 9 (контакты 71 и 72 преобразователя сигналов 7 соединены соответственно с контактами 121 и 122 концевого соединителя 12 и с входами 91 и 92 микроконтроллера 9), выходной контакт 73 преобразователя сигналов 7 соединен с выходом источника питания 10 через контакт 123 концевого соединителя 12, выходной контакт 74 преобразователя сигналов 7 соединен с общей шиной 25 через контакт 124 концевого соединителя 12.
Шина питания 26 соединяет стабилизатор напряжения 22 с генератором тестового сигнала 21, формирователями импульсов 19 и формирователем тестового напряжения 20. Общая шина 25 соединяет в индукционном модуле 5 один из выводов индукционной катушки 15 и один из выводов индукционной катушки 16, а в преобразователе сигналов 7 - генератор тестового сигнала 21, стабилизатор напряжения 22, формирователи импульсов 19 и формирователь тестового напряжения 20, а через выходной контакт 74 преобразователя сигналов 7 и контакт 124 концевого соединителя 12 - с источником питания 10, микроконтроллером 9 и индикатором неисправности 11. Между корпусом измерителя 4 и зубом-индуктором 3 выставлен регулируемый зазор 27.
Индукционный измеритель положения вращающегося вала работает следующим образом.
Постоянный магнит 13 и ферромагнитный полюс 14, расположенные в индукционном модуле 5, создают в зазоре 27 магнитный поток, и в соответствии с законом Фарадея в катушках 15 и 16 индуцируется ток при изменении пересекающего их витки магнитного потока, что происходит при изменении размера зазора 27 между ферромагнитным полюсом 14 и вращающимся индукторным диском 1. Прохождение зуба-индуктора 3 под ферромагнитным полюсом 14 с индукционными катушками 15 и 16 вызывает модуляцию магнитного потока, замыкаемого через зуб-индуктор 3 и зазор 27 на ферромагнитный полюс 14 (вращение вала 1 на рис. 1 против часовой стрелки). В обмотках индукционных катушек 15 и 16 генерируются импульсы индукционного тока, экстремальные значения которых (минимальное отрицательное и максимальное положительное) определяют угловое положение первой 31 и второй 32 боковых граней зуба-индуктора 3 относительно ферромагнитного полюса 14, при этом положительный экстремум соответствует прохождению второй боковой 32 грани 3 (зазор 27 и сопротивление магнитному потоку увеличиваются), т.к. ЭДС, генерируемая в индукционных катушках, определяется известным выражением (Карякин Н.И., Быстрое К.Н., Киреев П.С. Краткий справочник по физике. Изд. 3-е, стереотипн. М., «Высшая школа», 1969. - с 221):
где е - ЭДС, генерируемая в индукционных катушках 15 и 16;  - скорость изменения магнитного потока, проходящего через зазор 27.
- скорость изменения магнитного потока, проходящего через зазор 27.
Кривая выходного напряжения индукционной катушки 15 в зависимости от времени при прохождении зуба-индуктора 3 под ферромагнитным полюсом 14 представлена на фиг. 3, а спектральная характеристика положительной половины кривой выходного напряжения индукционной катушки 15 - на фиг. 4.
Импульсы индукционного тока 28 с выхода индукционной катушки 15 поступают на фильтр нижних 17 и верхних 18 частот.
Частота среза фильтра нижних частот 17 выбирается ниже (не менее, чем в три раза) максимальной частоты основной части спектра импульса индукционного тока, которая определяется по формуле

где  - половина временного интервала между экстремумами кривой выходного напряжения 28 индукционной катушки 15 при минимальной угловой скорости вращения диска 2, dП - диаметр ферромагнитного полюса 14 индукционного модуля 5, SЗ - размер плоскости установленного на диске 2 зуба-индуктора 3, проходящей под ферромагнитным полюсом 14 при вращении диска 2,
- половина временного интервала между экстремумами кривой выходного напряжения 28 индукционной катушки 15 при минимальной угловой скорости вращения диска 2, dП - диаметр ферромагнитного полюса 14 индукционного модуля 5, SЗ - размер плоскости установленного на диске 2 зуба-индуктора 3, проходящей под ферромагнитным полюсом 14 при вращении диска 2,  ~ минимальная угловая скорость вращения диска 2, определяемая (соответствующая, заданная) технической документацией на устройство, RД - радиус диска 2.
~ минимальная угловая скорость вращения диска 2, определяемая (соответствующая, заданная) технической документацией на устройство, RД - радиус диска 2.
Так как частота среза фильтра нижних частот 17 значительно ниже максимальной частоты спектра импульса индукционного тока, генерируемого в индукционной катушке 15 в результате прохождения зуба-индуктора 3 под ферромагнитным полюсом 14, то через фильтр нижних частот 17 проходит сигнал только в моменты приближения скорости изменения магнитного потока к нулю (т.е. в момент, близкий к максимальному значению импульса индукционного тока), а это соответствует прохождению второй боковой грани 32 зуба-индуктора 3 под ферромагнитным полюсом 14. С выхода фильтра нижних частот 17 сигнал поступает на формирователь импульсов 19, где формируется импульс 29, первый фронт которого соответствует угловому положению второй боковой грани 32 зуба-индуктора 3 под ферромагнитным полюсом 14. Фиксация углового положения индукторного диска 2 осуществляется с помощью микроконтроллера 9, на вход 91 которого поступают импульсы с формирователя импульсов 19.
Частота среза фильтра верхних частот 18 выбирается на несколько порядков больше максимальной частоты основного спектра импульса индукционного тока 28, по этой причине импульсы индукционного тока 28, генерируемые в индукционной катушке 15 в результате прохождения зуба-индуктора 3 под ферромагнитным полюсом 14, не проходят через фильтр верхних частот 18 и не поступают на вход формирователя тестового напряжения 20.
Для дистанционной проверки целостности индукционных катушек 15 и 16 и входных электрических цепей формирователей импульсов 19 и тестового напряжения 20 в процессе измерений углового положения вращающегося вала 1 с выхода генератора тестовых сигналов 21 на индукционную катушку 16 подается переменное напряжение (соответственно в индукционной катушке 16 протекает переменный ток), частота которого выше частоты среза фильтра верхних частот 18 и выше на несколько порядков максимальной частоты основного спектра импульса индукционного тока 29, генерируемого в индукционной катушке 15 в результате прохождения зуба-индуктора 3 под ферромагнитным полюсом 14. Переменный ток в индукционной катушке 16 приводит к появлению переменного магнитного потока и за счет взаимной индукции в индукционной катушке 15 наводится напряжение индукционного тока, частота которого равна частоте напряжения на выходе генератора тестовых сигналов 21. Возникающее напряжение индукционного тока за счет высокого значения частоты не проходит через фильтр нижних частот 17, но проходит через фильтр верхних частот 18, после которого с помощью формирователя тестового напряжения 20 последовательность импульсов с частотой генератора тестовых сигналов 21 преобразуется в постоянное напряжение, значение которого равно напряжению на выходе стабилизатора напряжения 22. Постоянное напряжение с выхода формирователя тестового напряжения 20 поступает на вход 92 микроконтроллера 9. По сигналам, поступающим на входы 91 и 92 микроконтроллера 9, проводится анализ целостности индукционных катушек 15 и 16, а также входных электрических цепей формирователей импульсов 19 и тестового напряжения 20, при этом возможны несколько вариантов сочетания сигналов:
1) на входы 91 и 92 поступают сигналы с выходов формирователей импульсов 19 и тестового напряжения 20, в этом случае подтверждается целостность цепей индукционных катушек 15 и 16 и правильность работы формирователей импульсов 19 и тестового напряжения 20, на индикатор неисправности 11 выдается команда об исправной работе индукционного измерителя положения вращающегося вала;
2) на входы 91 и 92 не поступают сигналы с выходов формирователей импульсов 19 и тестового напряжения 20, в этом случае произошло нарушение целостности цепей индукционных катушек 15 и 16 или произошли сбои работы формирователей импульсов 19 и тестового напряжения 20, на индикатор неисправности 11 выдается команда о существовании неисправности в работе индукционного измерителя положения вращающегося вала;
3) на вход 91 поступают сигналы с выхода формирователя импульсов 19, а на вход 92 - не поступает постоянное напряжение с выхода формирователя тестового напряжения 20, в этом случае при целостности цепи индукционной катушки 15 нарушена целостность цепи индукционной катушки 16 или возникла неисправность в работе формирователя тестового напряжения 20, в результате на индикатор неисправности 11 выдается команда о существовании неисправности в работе индукционного измерителя положения вращающегося вала;
4) на вход 91 не поступают сигналы с выхода формирователя импульсов 19, но на вход 92 поступает постоянное напряжение с выхода формирователя тестового напряжения 20, в этом случае при целостности цепей индукционных катушек 15 и 16 возникла неисправность в работе формирователя сигналов 19, и на индикатор неисправности 11 выдается команда о существовании неисправности в работе индукционного измерителя положения вращающегося вала;
На нашем предприятии был изготовлен экспериментальный образец заявляемого индукционного измерителя положения вращающегося вала со следующими элементами.
Корпус индукционного измерителя 4 с размещенными в нем индукционным модулем 5 и установленным на плате 6 преобразователем сигналов 7:
- внешний диаметр 20 мм, материал 12Х18Н10Т,
- длина вместе с разъемом 80 мм,
- 2 постоянных магнита 13 (неодим-железо-бор), каждый имеет диаметр - 15 мм, высоту 10 мм;
- ферромагнитный полюс 14, материал - сталь 20X13, длина 14 мм, диаметр 6 мм;
- первая (рабочая) катушка 15:
длина катушки 8 мм;
ширина катушки 3 мм;
количество витков 544;
диаметр провода с лаковым покрытием 0,22 мм;
длина провода - ≈ 15,38 м;
материал провода - медь;
- вторая (тестирующая) катушка 16
длина катушки 8 мм;
ширина катушки 1,2 мм;
количество витков 272;
диаметр провода с лаковым покрытием - 0,22 мм;
длина провода - ≈ 11,37 м;
материал провода - медь;
- преобразователь сигналов 7 выполнен на двусторонней печатной плате 6 с размерами 10×11 мм2 с применением ЧИП-элементов для поверхностного монтажа с использованием фильтра нижних частот второго порядка 17 (частота среза 160 Гц) и верхних частот второго порядка 18 (частота среза 16 кГц);
- частота генератора 21 тестовых сигналов 32 кГц;
- источник питания 10+27 В 6;
- стабилизатор напряжения 22+5 В.
Визуализация процессов осуществлялась двухлучевым запоминающим осциллографом (изображения сигналов представлены на фиг. 3).
Установка, на которой проводились испытания опытного образца заявляемого индукционного измерителя положения вращающегося вала, имела следующие параметры:
- диск 2 диаметром 240 мм, жестко соединенный с вращающимся валом 1,
- частота вращения диска 2 изменялась от 1 Гц до 20 Гц;
- зуб-индуктор 3, установленный на диске 2, имеет высоту 10 мм и длину плоскости, проходящей под ферромагнитным полюсом 14-10 мм;
- зазор 27 между зубом-индуктором 3 и ферромагнитным полюсом 14-3 мм;
- угловое положение зуба-индуктора 3 относительно корпуса 4 измерителя определялось с помощью оптической системы, которая фиксировала с помощью первого канала запоминающего осциллографа прохождение задней плоскости зуба-индуктора 3 относительно ферромагнитного полюса 14, второй канал запоминающего осциллографа подключался к выходу формирователя импульсов 19.
Программа экспериментальных исследований состояла из двух этапов.
На первом этапе проверялась возможность работы индукционного измерителя положения вращающегося вала в диапазоне работы его угловых скоростей. С этой целью изменялась угловая скорость вращения вала 1 и фиксировалось с помощью второго канала запоминающего осциллографа положение импульсного сигнала с выхода формирователя импульсов 19 при прохождении второй боковой грани 32 зуба-индуктора 3 относительно ферромагнитного полюса 14. Определялось отклонение фронта импульсного сигнала 29 с выхода формирователя импульсов 19 от заднего фронта сигнала, полученного с помощью эталонной оптической системы, определяющей с более высокой точностью угловое положение второй боковой грани 32 зуба-индуктора 3.
На втором этапе в индукционный измеритель положения вращающегося вала искусственно вводились различные неисправности и анализировались сигналы на выходах формирователей импульсов 19 и тестового напряжения 20.
Результаты экспериментальных исследований опытного образца индукционного измерителя положения вращающегося вала представлены ниже в виде таблицы (первый этап исследований) и полученных результатов влияния различных искусственных неисправностей с соответствующими выводами (второй этап исследований).
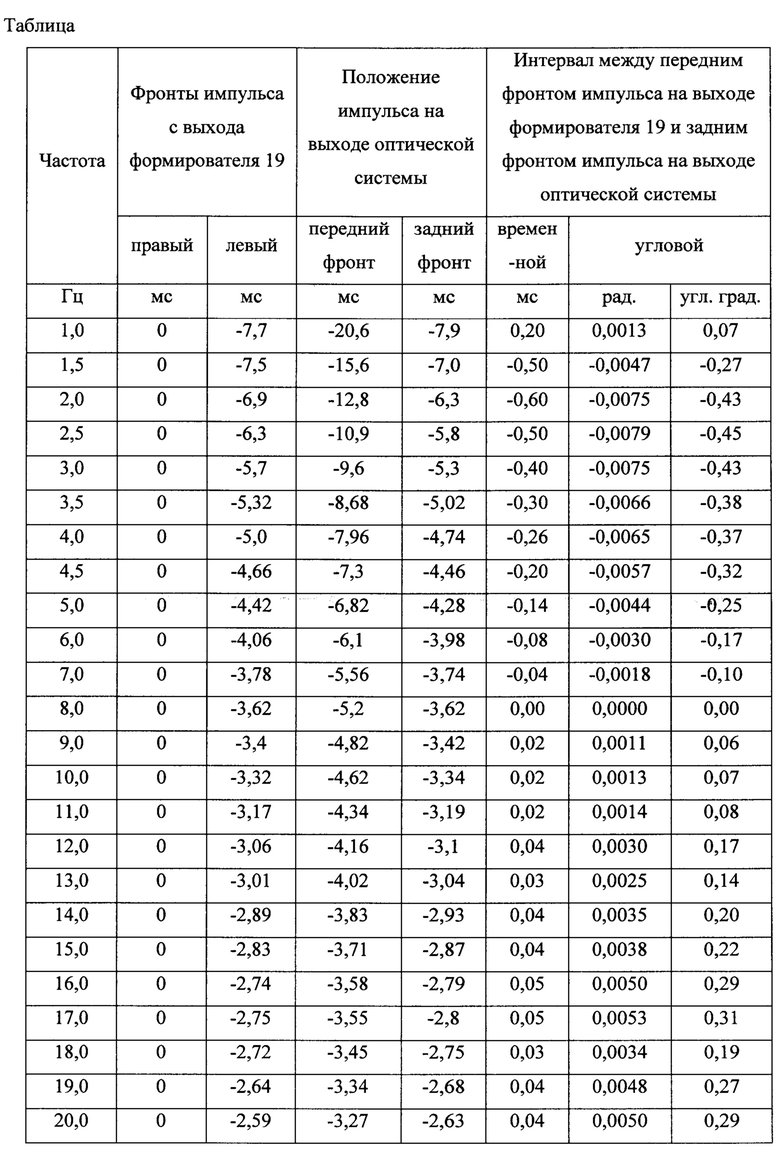
Из таблицы видно, что отклонение переднего (левого) фронта импульса, сформированного формирователем импульсов 19, и заднего фронта импульса, полученного с помощью эталонной оптической системы, не превышает 0,45 угл. град.
На втором этапе экспериментальных исследований в процессе работы индукционного измерителя положения вращающегося вала на частоте вращения вала 5 Гц с выхода генератора тестовых сигналов 21 подавалась частота 32 кГц на вторую тестирующую катушку 16. С помощью фильтров нижних 17 и верхних 18 частот второго порядка проводилось разделение сигналов на выходе первой (рабочей) катушки 15, которые поступали на формирователи импульсов 19 и тестового напряжения 20. С помощью двухканального запоминающего осциллографа определялось наличие сигналов, если не происходило никаких сбоев в работе устройства.
В первом эксперименте не вводились искусственные неисправности в цепи индукционных катушек 15 и 16, и оба сигнала отображались на экране запоминающего осциллографа.
Во втором эксперименте нарушалась целостность первой (рабочей) индукционной катушки 15. На выходах формирователя импульсов 19 и формирователя тестового напряжения 20 отсутствовали сигналы (импульсный на выходе формирователя 19 и постоянное напряжение +5 В на выходе формирователя тестового напряжения 20), с помощью которых необходимо определять положение зуба-индуктора 3 относительно ферромагнитного полюса 14 и целостность цепей индукционных катушек 15 и 16.
В третьем эксперименте нарушалась целостность второй (тестирующей) индукционной катушки 16. В этом случае на выходе формирователя импульсов 19 наблюдался импульс на экране осциллографа при прохождении зуба-индуктора 3 под фероромагнитным полюсом 14, а постоянное напряжение +5 В на выходе формирователя тестового напряжения 20 не наблюдалось. Сделан вывод о неправильной работе системы для определения работоспособности устройства.
Таким образом, видно, что приведенные выше сведения подтверждают возможность осуществления индукционного измерителя положения вращающегося вала, достижения указанного технического результата и решения поставленной задачи.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИСТЕМА БЕСКОНТАКТНОГО ИЗМЕРЕНИЯ ЧАСТОТЫ ВРАЩЕНИЯ | 2015 |
|
RU2623680C1 |
| Устройство измерения крутящего момента вала | 2022 |
|
RU2795384C1 |
| Высоковольтный счетчик электрической энергии прямого включения | 2023 |
|
RU2807018C1 |
| ПУТЕВОЙ ДАТЧИК | 1995 |
|
RU2084363C1 |
| ПРОМЕЖУТОЧНЫЙ ИСТОЧНИК ПИТАНИЯ | 2019 |
|
RU2723677C1 |
| БЕСКОНТАКТНЫЙ КОДОВЫЙ ПУТЕВОЙ ТРАНСМИТТЕР | 2013 |
|
RU2526726C1 |
| ИНДУКТОРНЫЙ ГЕНЕРАТОР С СОВМЕЩЕННЫМИ ОБМОТКАМИ ВОЗБУЖДЕНИЯ И СТАТОРА | 2019 |
|
RU2702615C1 |
| Преобразователь частоты вращения вала | 1990 |
|
SU1770912A1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ СИНХРОННАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414794C1 |
| БЕСКОНТАКТНАЯ МОДУЛЬНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА | 2010 |
|
RU2414793C1 |
Изобретение относится к измерительной технике и может быть использовано для определения фиксированного углового положения вращающегося вала с системой непрерывного контроля его работоспособности. Индукционный измеритель содержит жестко закрепленный на вращающемся валу индукторный диск с одним зубом-индуктором, корпус измерителя с размещенными в нем индукционным модулем и установленным на плате преобразователем сигналов, блок регистрации, включающий микроконтроллер, источник питания и индикатор неисправности. Блок регистрации соединен с преобразователем сигналов концевым соединителем. Корпус индукционного измерителя устанавливается неподвижно. Размещенный в корпусе измерителя индукционный модуль состоит из постоянного магнита, ферромагнитного полюса и двух индукционных катушек, установленных соосно на ферромагнитном полюсе. В состав преобразователя сигналов входят фильтры нижних и верхних частот, формирователи импульсов и тестового напряжения, генератор тестовых сигналов и стабилизатор напряжения. Технический результат – дистанционная проверка целостности индукционной катушки измерителя и входных электрических цепей. 4 ил., 1 табл.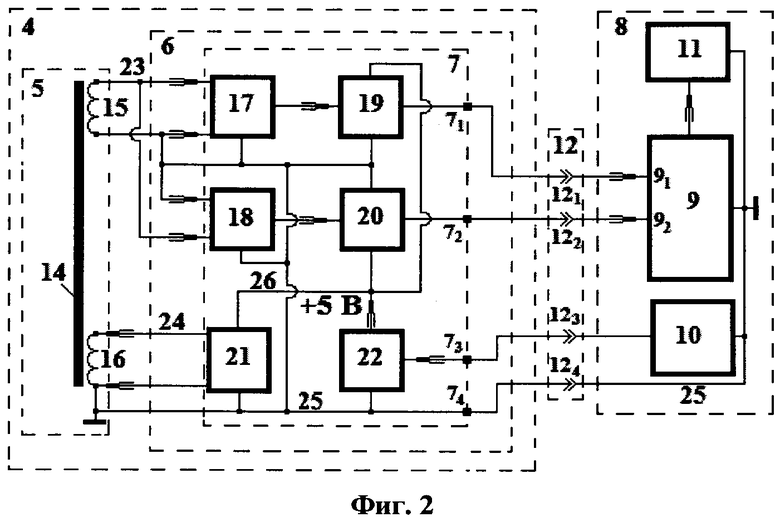
Индукционный измеритель положения вращающегося вала, включающий жестко закрепленный на вращающемся валу индукторный диск, связываемый с ним через магнитный поток, размещенный в корпусе измерителя 4 индукционный модуль 5, содержащий постоянный магнит с ферромагнитным полюсом и установленными соосно постоянному магниту и ферромагнитному полюсу двумя индукционными катушками, преобразователем сигнала с фильтром нижних частот и блоком регистрации с микроконтроллером и источником питания, отличающийся тем, что индукторный диск выполнен с одним зубом-индуктором, преобразователь сигналов снабжен фильтром верхних частот, формирователем импульсов, формирователем тестового напряжения, генератором тестовых сигналов, стабилизатором напряжения, причем блок регистрации соединен с преобразователем сигналов четырехконтактным концевым соединителем и снабжен индикатором неисправности и источником питания, при этом выход первой - рабочей индукционной катушки соединен с входами фильтров нижних и верхних частот, выходы которых соединены соответственно с входами формирователя импульсов и формирователя тестового напряжения, выход формирователя импульсов соединен через первый выходной контакт преобразователя сигналов и первый контакт концевого соединителя с первым входом микроконтроллера, второй вход которого соединен через второй выходной контакт преобразователя сигналов и второй контакт концевого соединителя с выходом формирователя тестового напряжения, выход генератора тестовых сигналов соединен с входом второй индукционной катушки, вход стабилизатора напряжения соединен через третий выходной контакт преобразователя сигналов и третий контакт концевого соединителя с выходом источника питания, а выход стабилизатора напряжения - с генератором тестовых сигналов, формирователями импульсов и тестового напряжения, общая шина соединена с одним из выводов первой и второй индукционных катушек, генератором тестового сигнала, стабилизатором напряжения, формирователями импульсов и тестового напряжения, а также через четвертый выходной контакт преобразователя сигналов и четвертый контакт концевого соединителя - с источником питания, микроконтроллером и индикатором неисправности.
| WO 2012158342 A2, 22.11.2012 | |||
| US 4972332 A1, 20.11.1990 | |||
| 0 |
|
SU354442A1 | |
| Приспособление для соединения бурильных труб | 1929 |
|
SU19587A1 |

