Изобретение относится к способу определения положения и/или изменения положения объекта измерения относительно чувствительного элемента, причем чувствительный элемент предпочтительно представляет собой катушку чувствительного элемента, подпитываемую переменным током. Кроме того, изобретение относится к соответствующему измерительному (сенсорному) устройству.
Электромагнитные датчики находят широкое применение в технике. Они применяются, например, для контроля расстояния чувствительного элемента от объекта измерения, для измерения вращательного движения или хода клапанов, для определения положения поршня или обнаружения проводящих объектов. Этот не ограничивающий перечень характеризует огромные возможности использования этого класса чувствительных элементов.
В датчике пути, известном из DE 36 10 479 А1, в качестве объекта измерения используется постоянный магнит, перемещающийся вдоль магнитомягкого сердечника. На сердечник намотаны две катушки подмагничивания, на которые подаются противоположно направленные токи, и вторичная обмотка. В зависимости от положения объекта измерения относительно чувствительного элемента на месте магнитомягкого сердечника образуется виртуальный воздушный зазор, следствием чего является то, что напряжение, индуцированное в катушке со вторичной обмоткой, изменяется с изменением положения объекта измерения. Напряжение пропорционально положению объекта измерения относительно чувствительного элемента.
Из ЕР 1 158 266 А1 известна система измерения перемещений, содержащая индуктивный чувствительный элемент, датчик и блок обработки данных. Согласно примеру осуществления в качестве датчика используется магнит, положение которого относительно чувствительного элемента может варьироваться. Магнитное поле магнита приводит магнитомягкий материал в насыщение. Под действием этого локального эффекта насыщения изменяется индуктивность измерительной катушки чувствительного элемента, соединенной с осциллятором, изменения частоты или амплитуды которого индицируются.
Из DE 203 07 652 U1 известен магнитоуправляемый датчик перемещений с магнитовосприимчивым чувствительным элементом и с магнитом, перемещаемым вдоль линии движения. Параллельно линии движения установлен стержень из магнитомягкого материала, с торцевой стороны которого установлен магнитовосприимчивый чувствительный элемент, обращенный к этой торцевой стороне. Длина стержня и ширина магнита определяют диапазон измерений датчика перемещений.
Для бесконтактной регистрации вращательного движения индуктора применяются чувствительные элементы с магнитоэлектрическими преобразователями. Примеры этого известны из US 4 926 122 A, EP 0 729 589 B1 или DE 30 41 01 C2. На практике эти преобразователи для обеспечения высокой помехоустойчивости устанавливаются вплотную с объектом измерения. При таких незначительных интервалах (зачастую порядка 1 мм) чувствительный элемент, в частности, в реальных условиях эксплуатации, может получить повреждения. В частности, в динамичном режиме важна надежная регистрация вращательного движения при относительно большом основном интервале.
Другие чувствительные элементы и реле близости, использующие эффект насыщения магнитомягких материалов с высокой магнитной проницаемостью, известны из DE 38 03 293 A1 и DE 38 03 253 A1 или DE 36 10 479 A1. Однако интервал срабатывания таких чувствительных элементов ограничен. Для получения больших диапазонов измерений схема обработки должна иметь большой коэффициент усиления. Однако это приводит к чересчур большим температурочувствительным ошибкам и высоким требованиям к установочным допускам.
Поэтому в основу изобретения положена задача создания способа, с помощью которого положение или изменение положения объекта измерения относительно чувствительного элемента с большим разрешением могло бы измеряться как в статическом, так и в динамическом режиме. Кроме того, необходимо создать соответствующее устройство с возможно более простой конструкцией.
Согласно изобретению поставленная выше задача решается с помощью признаков пункта 1 формулы изобретения. В соответствии с этим пунктом способ согласно изобретению отличается тем, что магнит, предназначенный для объекта измерения, в магнитомягкой пленке, магнитная проницаемость которой изменяется под влиянием магнитного поля в зависимости от напряженности магнитного поля и которая находится в области влияния чувствительного элемента, вызывает изменение магнитной проницаемости пленки и что по его обратному действию на чувствительный элемент определяется изменение магнитной проницаемости пленки, а отсюда положение и/или изменение положения объекта измерения относительно чувствительного элемента. Определению положения или изменению положения соответствует определение угла, изменения угла или числа оборотов.
В техническом отношении задача, поставленная выше, решается с помощью признаков пункта 13 формулы изобретения. В этом смысле сенсорное устройство согласно изобретению отличается тем, что в области влияния чувствительного элемента расположена пленка из магнитомягкого материала, причем магнитная проницаемость пленки под влиянием магнитного поля изменяется в зависимости от напряженности магнитного поля, и что предусмотрена схема обработки, с помощью которой изменение магнитной проницаемости пленки определяется по его обратному действию на чувствительный элемент и делается вывод в отношении положения и/или изменения положения объекта измерения относительно чувствительного элемента. Здесь также следует заметить, что определению положения или изменению положения соответствует определение угла, изменения угла или числа оборотов.
Альтернативный вариант осуществления сенсорного устройства, решающий задачу, поставленную выше, охарактеризован в пункте 25 формулы изобретения. В этом смысле сенсорное устройство согласно изобретению отличается тем, что в области влияния чувствительного элемента расположена пленка из магнитомягкого материала, причем магнитная проницаемость пленки под воздействием магнитного поля изменяется в зависимости от напряженности магнитного поля и причем движение объекта измерения происходит по существу в направлениях, параллельных направлению протяженности пленки, и что по ее обратному действию на чувствительный элемент определяется изменение магнитной проницаемости пленки, а отсюда делается вывод в отношении положения и/или изменения положения объекта измерения относительно чувствительного элемента. Здесь также следует заметить, что определению положения или изменению положения соответствует определение угла, изменения угла или числа оборотов.
Способом согласно изобретению прежде всего установлено, что для высокоточного измерения положения может быть использовано одно из свойств магнитомягких материалов. Под влиянием внешнего магнитного поля магнитная проницаемость магнитомягких материалов изменяется в зависимости от наличия соответствующей напряженности поля.
Это свойство может найти применение в сенсорном устройстве. Для этого объекту измерения, положение которого должно быть установлено относительно чувствительного элемента, выделяется магнит. Благодаря этому магниту при приближении объекта измерения к чувствительному элементу или чувствительного элемента к объекту измерения напряженность магнитного поля вокруг магнитомягкого материала возрастает. В результате снижается его магнитная проницаемость, что сказывается на свойствах измерительного элемента, установленного вблизи магнитомягкого материала, и с помощью соответствующей схемы обработки, соединенной с измерительным элементом, может быть поставлено в соответствие с показателем положения или изменения положения объекта измерения. Соответствующими измерительными элементами являются, например, датчики магнитного поля, такие как: датчики Холла, датчики AMR и GMR, или индуктивные датчики, например, катушки индуктивного датчика или датчика вихревых токов, или любой другой измерительный элемент, чувствительный к изменениям магнитной проницаемости.
Кроме того, согласно изобретению установлено, что улучшение чувствительности сенсорного устройства может быть достигнуто за счет того, что магнитомягкий материал может быть выполнен только в виде тонкой пленки. Тем самым в значительной мере предотвращается возникновение объемных эффектов, благодаря чему для изменений магнитной проницаемости необходимы меньшие напряженности магнитного поля и меньше времени. Это благоприятно сказывается на чувствительности и динамике сенсорного устройства. Более того, это ведет к тому, что магнитное поле магнита, предназначенного для объекта измерения, может оказывать влияние на магнитную проницаемость пленки в относительно большем диапазоне измерений.
При перемещениях объекта измерения и чувствительного элемента относительно друг друга, происходящих по существу параллельно направлению протяженности пленки, в пленке возникают область высокой магнитной проницаемости, область пониженной магнитной проницаемости и переходная область между обеими этими областями. В зависимости от расстояния между чувствительным элементом и объектом измерения переходная область может смещаться вдоль пленки. В результате большое влияние измерительного элемента достигается в относительно большом диапазоне измерений.
Особым преимуществом является такая конфигурация сенсорного устройства, при которой направление магнитного поля магнита объекта измерения совпадает с осью «тяжелой» намагниченности пленки. В этом случае магнитное поле магнита обладает индуктивной связью лишь с небольшой поверхностью торцевой стороны пленки. Также предпочтительно, чтобы эффективно могла использоваться ненасыщенная область пленки.
Разрешение и точность сенсорных устройств согласно изобретению зависят от электромагнитных и механических свойств пленки. Использоваться может пленка из металла М, сплава Vitrovac или феррита.
Предпочтительной является комбинация высокой механической прочности с очень хорошими электромагнитными свойствами, достигаемыми, например, за счет использования пленки из нанокристаллического материала. К очень хорошим электромагнитным свойствам относятся высокая магнитная проницаемость (например, µ=50 000-500 000), относительно малая электропроводность и малые потери в широких диапазонах температур и частот.
Описанные эффекты согласно изобретению могут использоваться в нижеописанных вариантах осуществления. Задачей этих вариантов осуществления являются создание чувствительного элемента с возможно большей областью чувствительности и достижение возможно большей чувствительности чувствительного элемента.
Согласно изобретению используется пленка из магнитомягкого материала, изменение магнитной проницаемости которой воздействует на катушку чувствительного элемента.
Изменение магнитной проницаемости имеет регистрируемое обратное действие на катушку, обычно выражающееся в изменении импеданса катушки. Импеданс или изменение импеданса катушки может быть измерено обычным образом, например, при подаче на катушку чувствительного элемента переменного тока.
Однако следует подчеркнуть, что изменение магнитной проницаемости может быть зарегистрировано и другими индуктивными или магнитовосприимчивыми измерительными элементами.
В рамках предпочтительного варианта осуществления вблизи магнитомягкой пленки в дополнение к катушке чувствительного элемента, обтекаемой переменным током, устанавливается компенсационная катушка, возбуждаемая постоянным током. В результате - в зависимости от исполнения и расположения катушки - магнитная проницаемость подвергается воздействию в большей или меньшей области пленки. Это может быть использовано для целенаправленного создания особенно благоприятных условий для индикации объекта измерения. Если объект измерения находится на относительно большом расстоянии, то магнитное поле магнита, предназначенного для объекта измерения, будет оказывать на пленку лишь незначительное влияние, поскольку чувствительность сенсорного устройства находится в неблагоприятном диапазоне. Подачей на компенсационную катушку постоянного тока может быть достигнуто смещение характеристики чувствительности, а чувствительность в определенной части диапазона измерений целенаправленно повышена. С другой стороны, напряженность уже могла бы достичь высоких значений, если бы объект измерения находился, например, слишком близко к чувствительному элементу. В этом случае с помощью компенсационной катушки напряженность может быть уменьшена, так что сенсорное устройство снова окажется в более благоприятном режиме работы. Таким образом, в зависимости от полярности и силы постоянного тока диапазон измерений может быть существенно расширен, а чувствительность в диапазоне измерений улучшена. Кроме того, посредством регулировки магнитного поля компенсационной катушки могут быть скомпенсированы или отрегулированы установочные допуски или медленно изменяющиеся помехи, как то: температурный дрейф или старение.
Оба варианта осуществления могут также реализовываться одновременно, благодаря чему положительные эффекты обоих вариантов осуществления суммируются.
В варианте осуществления с катушкой возбуждения постоянным током постоянный ток устанавливается предпочтительным образом. Это, с одной стороны, может относится к силе постоянного тока, а, с другой, и к его полярности. Благодаря регулировке силы постоянного тока можно изменять величину воздействия магнитной проницаемости магнитомягкой пленки. Изменение полярности приводит к тому, что результирующее магнитное поле, складывающееся из магнитных полей катушки чувствительного элемента, компенсационной катушки и магнита объекта измерения, повышается или понижается. В результате на магнитную проницаемость пленки может оказываться особенно мощное воздействие. При этом постоянный ток мог бы устанавливаться таким образом, чтобы устанавливалось по существу постоянное магнитное поле катушки.
Чувствительный элемент, особенно перед первым включением, предпочтительно подвергается калибровке. Для этого предпочтительно выполняются следующие шаги. На первом шаге объект измерения устанавливается во множестве положений h относительно чувствительного элемента. При этом отдельные положения h располагаются с интервалом δh. Предпочтительно отдельные положения устанавливаются таким образом, чтобы они располагались по существу на одной общей линии.
В каждом положении h в катушку чувствительного элемента подается переменный ток. В результате катушка чувствительного элемента создает переменное электромагнитное поле, оказывающееся под воздействием магнитомягкой пленки. Для каждого положения h выбираются импеданс Z и/или относительное изменение ∆Z/Z импеданса катушки. Для этого из практики этого известны различные способы. По полученным таким образом величинам определяется характеристика, описывающая зависимость между относительной чувствительностью S катушки чувствительного элемента и положением h объекта измерения относительно катушки чувствительного элемента. При этом относительная чувствительность S выражается следующим образом:
S=∆Z/Z:δh
По этой характеристике определяется положение h0, в котором относительная чувствительность S принимает максимальное значение. Величина Z0 комплексного импеданса, соответствующая этому положению h0, записывается в энергонезависимую память. Таким образом, с помощью этих шагов была определена характеристика чувствительного элемента.
С помощью следующих шагов определяется зависимость результатов измерения от силы постоянного тока. Для этого сначала в компенсационную катушку подается постоянный ток. Объект измерения снова устанавливается в различные положения h, и определяются импеданс Z или относительное изменение ∆Z/Z импеданса катушки в каждом положении h. При этом на пленку действует суммарное магнитное поле катушки чувствительного элемента, компенсационной катушки и магнита измерительного объекта. На первом шаге варьируется сила постоянного тока в диапазоне ∆h измерений. Это повторяется до тех пор, пока не будет достигнута заранее определенная и зафиксированная в памяти заданная величина импеданса. По определенным таким образом величинам определяется зависимость постоянного тока от изменения положения объекта измерения. При этом оказалось, что в диапазоне ±∆h измерений обнаруживается по существу линейная связь между положением h и постоянным током в компенсационной катушке. Поэтому во многих случаях применения может оказаться достаточным определить и запомнить только коэффициент пропорциональности между изменением положения и постоянным током.
Предпочтительно, чтобы заранее определенная величина комплексного импеданса определялась на основном расстоянии между объектом измерения и чувствительным элементом, у которого изменения положения объекта измерения приводят к максимальным изменениям импеданса системы катушек.
В общем случае для определения обратного действия изменения магнитной проницаемости пленки на катушку измеряется ее импеданс или изменение импеданса. Однако следует заметить, что измерение магнитной проницаемости в принципе могло бы производиться и другим способом. Измерение импеданса может производиться прямо или косвенно. Так, например, при регистрации известного тока может измеряться напряжение, падающее на катушке, а путем деления напряжения на ток определяться импеданс. Правда, импеданс можно было бы также увеличить за счет параллельного подключения емкости к свободно колеблющемуся осциллятору, управляемому, например, схемой PLL (Phase Locked Loop). По выходному сигналу схемы PLL можно определить импеданс катушки чувствительного элемента.
По комплексному импедансу Z катушки чувствительного элемента можно определить действительную составляющую Re{Z} и мнимую составляющую Im{Z}. Определение действительной и мнимой составляющих может осуществляться аналоговым или цифровым способом. Соответствующие варианты достаточно известны из практики. Дополнительно по действительной составляющей Re{Z} и мнимой составляющей Im{Z} можно было бы получить частное D, причем в отношении частного D действует формула:
D=Re{Z}/Im{Z}
Согласно предпочтительному варианту осуществления изобретения величина постоянного тока устанавливается посредством компенсационной катушки путем следящего управления с помощью замкнутого контура регулирования. При этом частное D может служить для контура регулирования заданной величиной, причем D могло бы оставаться постоянным. По мнимой составляющей Im{Z} можно было бы определить положение или изменение положения объекта измерения относительно чувствительного элемента. В этом случае в порядке дополнения или альтернативы силу постоянного тока в компенсационной катушке можно было бы использовать для определения положения.
Предпочтительно регулирование осуществляется таким образом, чтобы максимальная относительная чувствительность S чувствительного элемента во всем диапазоне измерений или по меньшей мере в его части оставалась постоянной. Для этого можно было бы использовать информацию, полученную в результате калибровки. Максимальная чувствительность имеет место в положении h0, которое может перемещаться выбором постоянного тока в компенсационной катушке.
В качестве альтернативы регулированию постоянный ток можно было бы устанавливать вручную. В частности, при перемещениях объекта измерения с высокой динамикой регулирование не позволило бы достаточно быстро реагировать на изменения. Установка постоянного тока вручную реализуется различными способами. Так, например, сила постоянного тока могла бы, например, устанавливаться с клавиш, или с клавиатуры. В порядке альтернативы или дополнения можно было бы использовать аналоговые или цифровые потенциометры или ползунковые регуляторы.
В сенсорном устройстве, располагающем компенсационной катушкой возбуждения постоянным током, магнитные поля катушки чувствительного элемента, компенсационной катушки и магнита объекта измерения складываются в результирующее магнитное поле. При этом направление и полярность отдельных магнитных полей в общем случае будут различными. Магнитное поле катушки чувствительного элемента, обусловленное подпиткой переменным током, является переменным и, таким образом, изменяет свою полярность с двойной частотой переменного тока. Магнитное поле компенсационной катушки в зависимости от положения объекта измерения относительно чувствительного элемента устанавливается путем регулировки или вручную. При этом полярность постоянного тока, возбуждающего компенсационную катушку, выбирается таким образом, что статическая составляющая магнитного поля возрастает или уменьшается. Это будет зависеть от того, в каком направлении должно перемещаться результирующее магнитное поле для достижения максимально хороших или даже идеальных условий для измерения положений. Магнитное поле магнита, предназначенного для объекта измерения, в общем случае будет неоднородным и будет зависеть от расстояния между чувствительным элементом и объектом измерения.
Катушка чувствительного датчика и компенсационная катушка могут быть гальванически отделены друг от друга. Благодаря этому обе катушки можно подпитывать током абсолютно независимо друг от друга. Однако следует указать на то, что обе катушки можно было бы объединить в одну отдельную катушку, или одна из обеих катушек благодаря промежуточному отводу может быть выполнена в качестве секции другой катушки. При варианте выполнения в виде отдельной катушки в катушку стал бы подаваться переменный ток, смещенный на составляющую постоянного тока. Напряжение смещения (Offset) так же, как и при гальванически раздельном исполнении, могло бы устанавливаться с помощью контура регулирования или вручную.
В случае магнита объекта измерения речь может идти предпочтительно о постоянном магните. Благодаря этому объект измерения может использоваться без какой-либо дополнительной подачи энергии. Однако магнит мог бы быть также образован электромагнитом. Таким образом могло бы продолжаться оказание воздействия на измерение. Если объект измерения находится, например, сравнительно близко к чувствительному элементу, то при уменьшении тока возбуждения может быть ослаблено магнитное поле магнита. Точно так же при большом расстоянии между объектом измерения и чувствительным элементом ток возбуждения можно было бы увеличить. Оба варианта выполнения магнита могут быть также использованы комбинированно.
В одном из возможных вариантов выполнения схемы обработки для чувствительного элемента пленка находится в емкостной связи с катушкой чувствительного элемента. В этом варианте выполнения пленка имеет электрический контакт, соединенный с осциллятором. Другой полюс осциллятора соединен с одним из выводов катушки чувствительного элемента. Таким образом, энергия подается в катушку чувствительного элемента с помощью емкостной связи. Оба вывода катушки чувствительного элемента соединены со входами усилителя, усиливающего напряжение, падающее на катушку чувствительного элемента. При этом усилитель является частью схемы обработки, с помощью которой определяется изменение магнитной проницаемости пленки. Напряжение, падающее на катушке, усиливается усилителем и выдается в виде усиленного сигнала U2. Этот сигнал U2 пропорционален относительному изменению ∆Z/Z импеданса.
В качестве альтернативы этому варианту выполнения осциллятор мог бы соединяться с катушкой чувствительного элемента непосредственно. Таким образом, переменный ток мог бы подаваться в катушку непосредственно. В этом случае пленка могла бы быть соединена, например, с массой. В этом варианте выполнения напряжение, падающее на катушку чувствительного элемента, также усиливалось бы, и выдавался бы сигнал U2, пропорциональный относительному изменению ∆Z/Z импеданса.
В обоих случаях могло бы быть предусмотрено электронное устройство, формирующее из сигнала U2 напряжения две ортогональных составляющих напряжения. В этом случае обе составляющие пропорциональны действительной составляющей Re{Z} или мнимой составляющей Im{Z} комплексного сопротивления Z катушки чувствительного элемента. Электронное устройство выдавало бы сигналы U3 и U4 напряжения, представляющие собой ортогональные составляющие напряжения. Сигнал U4 мог бы быть использован для синхронизации осциллятора, в то время как сигнал U3 используется для управления источником напряжения, подпитывающим компенсационную катушку постоянным током.
Электронное устройство может быть реализовано с помощью самых разных устройств, известных из практики. Анализ усиленного напряжения предпочтительно осуществляется цифровым способом. В этом случае электронное устройство содержало бы аналого-цифровой преобразователь, процессор и память. Для гальванического отделения электронного устройства от источника тока можно было бы дополнительно предусмотреть оптоэлектронный элемент связи, благодаря которому управляющая информация передается источнику тока с гальванической развязкой.
В варианте выполнения сенсорного устройства без компенсационной катушки и с направлением перемещения объекта измерения, ограниченным направлениями, осуществляемыми по существу параллельно направлению протяженности пленки, магнит мог бы быть также реализован с помощью постоянного магнита или электромагнита. В варианте выполнения с электромагнитом снова можно было бы, как это было описано выше, повлиять на данные измерений чувствительного элемента.
И в этом варианте выполнения можно было бы произвести калибровку сенсорного устройства. Для этого следовало бы проделать соответствующие вышеописанные шаги по определению характеристики чувствительного элемента.
Вариант выполнения схемы обработки мог бы реализовываться по аналогии с вариантом выполнения с компенсационной катушкой. Осциллятор мог бы подавать сигнал напряжения прямо на контакт пленки. В этом случае напряжение могло бы подаваться на катушку чувствительного элемента с помощью емкости. Напряжение, появляющееся на катушке, могло бы снова усиливаться с помощью усилителя и подаваться на электронное устройство для определения действительной и мнимой составляющих. С помощью сигнала U4 напряжения, пропорционального мнимой составляющей, можно было бы осуществлять синхронизацию осциллятора.
Аналогичным образом осциллятор мог бы быть соединен с катушкой чувствительного элемента непосредственно, а падение напряжения, возникающее на катушке, усиливаться с помощью усилителя. В свою очередь, для разделения усиленного сигнала на действительную и мнимую составляющие он мог бы подаваться на электронное устройство.
В обоих вариантах осуществления сенсорного устройства согласно изобретению - т.е. сенсорного устройства с компенсационной катушкой или без нее - чувствительный элемент мог бы быть выполнен по-разному. Так, например, чувствительный элемент мог бы быть выполнен на круглой или на какой-либо иной трехмерной основе. На эту основу могли бы быть намотаны, наклеены или любым другим способом установлены катушка чувствительного элемента, пленка, а при необходимости компенсационная катушка.
В альтернативном варианте осуществления чувствительный элемент мог бы быть выполнен плоскостным. При этом чувствительный элемент предпочтительно установлен на плоской основе. Однако основа могла бы быть также выгнута и приспособлена к специфическим рабочим условиям. После соответствующих мероприятий по калибровке такие чувствительные элементы могут использоваться без проблем.
Для дальнейшего улучшения чувствительности сенсорного устройства толщина пленки могла бы быть подогнана под глубину проникновения электромагнитного поля, наведенного катушкой чувствительного элемента. При этом электромагнитное поле, наведенное катушкой чувствительного элемента, предпочтительно является высокочастотным. Глубина δ проникновения в проводящий материал определяется следующим образом:
δ∞1/√ωσµ, где
ω=2πf, где f - частота переменного поля, σ - проводимость и µ - магнитная проницаемость пленки. Как можно заметить, δ обратно пропорциональна корню из магнитной проницаемости µ пленки. Таким образом, если магнитная проницаемость пленки под действием внешнего магнитного поля падает, то глубина проникновения электромагнитного поля в пленку повышается. Если толщина пленки рассчитана соответствующим образом, то электромагнитное поле проходит через пленку на участках с низкой магнитной проницаемостью. Этот эффект может быть использован для дальнейшего повышения чувствительности. А именно, со стороны, противоположной катушке чувствительно элемента, вблизи пленки может быть расположена проводящая поверхность. При этом эта проводящая поверхность по сравнению с магнитомягкой пленкой предпочтительно имеет существенно большую проводимость. В результате в проводящей поверхности вихревые токи индуцируются в большей степени, чем в магнитомягкой пленке.
В частности, при ограничении перемещения объекта измерения в направлениях, по существу параллельных направлению протяженности пленки, в зависимости от положения объекта измерения достигается освобождение от магнитомягкой пленки проводящей поверхности, расположенной за ней. В зависимости от положения объекта измерения зона пониженной магнитной проницаемости различной ширины сделала бы магнитомягкую пленку проницаемой для электромагнитного поля. (Это наглядно может быть представлено таким образом, что пленка наподобие жалюзи открывает различные по размеру участки оконного проема.) В результате в зависимости от положения объекта измерения в проводящей поверхности индуцировались бы вихревые токи различной величины. Они вызывают более сильное воздействие импеданса катушки чувствительного элемента, чем вихревые токи, индуцированные в магнитомягкой пленке, что, в свою очередь, положительно сказывается на чувствительности сенсорного устройства.
Катушка чувствительного элемента предпочтительным образом подпитывается переменным током высокой частоты. В результате динамика чувствительного элемента является очень высокой. Правда, из-за высокой частоты глубина проникновения вихревых токов в проводящих материалах незначительна, которая, однако, для тонкой пленки (например, 20 µм) является достаточной. Следует признать, что объемный эффект не нужен или даже не желателен: при объемном магнитомягком материале вихревой ток стал бы протекать только в тонком слое, так что результат измерения по сравнению с объемом незначителен.
Как было описано выше, зона изменения магнитной проницаемости зависит от напряженности магнитного поля. В зависимости от магнита чувствительный элемент может измерять его положение на относительно большом расстоянии (например, 30 - 50 мм) с очень высоким разрешением (в несколько µм), для чего с помощью соответствующего устройства зона максимальной чувствительности располагается именно таким образом, чтобы рабочая точка находилась на заданном основном расстоянии магнита от чувствительного элемента. При соответствующем исполнении магнитного контура может быть получен так называемый типичный коэффициент избыточности порядка 3. Это означает, что путь перемещения объекта измерения в три раза больше изменения распределения магнитной проницаемости в пленке. Таким образом, протяженность пленки сокращается по сравнению с путем перемещения в соответствии с коэффициентом избыточности. Это особенно предпочтительно, поскольку благодаря этому обеспечивается укорочение и компактность конструкции таких чувствительных элементов.
Вышеописанные варианты выполнения чувствительных элементов могут быть также реализованы таким образом, чтобы пленка и магнит были стационарными, а перемещалась бы лишь катушка.
В другом предпочтительном варианте выполнения магнит может быть жестко соединен с чувствительным элементом. Для получения на месте катушки чувствительного элемента магнитного поля, изменяемого в зависимости от положения объекта измерения, объект измерения должен быть выполнен из материала, воздействующего на магнитные поля. Это может быть, например, ферромагнитный материал. Изменение положения ферромагнитного объекта измерения относительно чувствительного элемента и магнита, соединенного с чувствительным элементом, оказывает влияние на силовые линии магнитного поля и тем самым воздействует также на изменение распределения магнитной проницаемости в пленке.
Для настоящего изобретения и его усовершенствования существуют различные возможности целесообразного технического решения. Для этого, с одной стороны, можно сослаться на пункты формулы изобретения, следующие, соответственно, за пунктами 1, 13 и 25 формулы изобретения, а, с другой, на последующее пояснение предпочтительных примеров осуществления изобретения на основе чертежей. В сочетании с пояснением предпочтительных примеров осуществления изобретения на основе чертежей в общих чертах поясняются также предпочтительные и усовершенствованные варианты технического решения. На чертежах изображены:
на фиг. 1 - схематически устройство согласно изобретению для регистрации положения и/или изменений положения объекта измерения,
на фиг. 2 - диаграмма связи между распределением магнитного поля вдоль магнитомягкой пленки и положением h объекта измерения,
на фиг. 3 - диаграмма с примером характеристики относительной чувствительности S в зависимости от положения h объекта измерения относительно чувствительного элемента,
на фиг. 4 - диаграмма с характеристикой постоянного тока I_ в зависимости от положения h объекта измерения,
на фиг. 5 - первый пример осуществления с сенсорным устройством с компенсационной катушкой согласно изобретению,
на фиг. 6 - второй пример осуществления с сенсорным устройством с компенсационной катушкой согласно изобретению,
на фиг. 7 - третий пример осуществления с сенсорным устройством с компенсационной катушкой и с жестко установленным постоянным магнитом согласно изобретению,
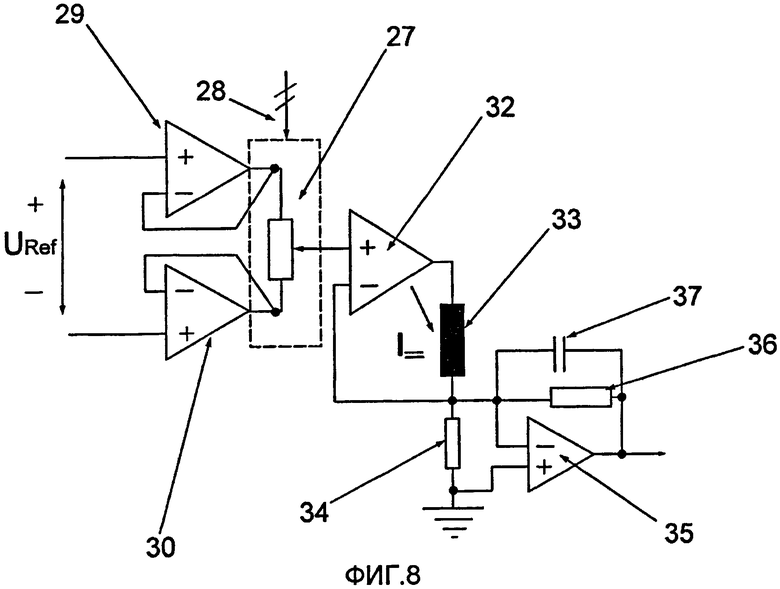
на фиг. 8 - схема управляемого источника тока для управления источником постоянного тока.
На отдельных фигурах для одинаковых или однородных компонентов использованы одинаковые позиции.
На фиг. 1 схематически изображена блок-схема сенсорного устройства 1 согласно изобретению для регистрации позиции h и/или изменения позиции h объекта 2 измерения относительно электромагнитного чувствительного элемента 3. Объекту 2 измерения придан магнит 4 в виде постоянного магнита, который в изображенном варианте выполнения окружен объектом 2 измерения почти со всех сторон. Чувствительный элемент 3 содержит систему 5 катушек, состоящую из катушки 6 чувствительного элемента и компенсационной катушки 7. В области влияния системы 5 катушек расположена пленка 8 из магнитомягкого материала. Катушка 6 чувствительного элемента 3 имеет два вывода К1 и К2. Вывод К1 соединен с синхронизируемым осциллятором 10, вывод К2 соединен со входом схемы 11 обработки и с электрическим контактом 9 пленки 8. Осциллятор 10 подпитывает катушку 6 чувствительного элемента 3 переменным напряжением с постоянной частотой и амплитудой. Таким образом, катушка 6 чувствительного элемента 3 создает переменное электромагнитное поле, индуцирующее в пленке 8 вихревые токи. При этом электромагнитные свойства, как то: электропроводимость σ и магнитная проницаемость µ материала пленки 8, влияют на характер и обратное действие вихревых токов на переменное поле. В результате изменения расстояния между объектом 2 измерения и чувствительным датчиком 3 изменяется магнитная проницаемость µ пленки 8, что ведет к изменению переменного поля в системе 5 катушек. Вследствие этого изменятся комплексный импеданс Z катушки 6 чувствительного элемента, измеряемый с помощью схемы 11 обработки. Падение напряжения между выводами К1 и К2 усиливается дифференциальным усилителем 12, причем напряжение U2 на выходе усилителя 12 пропорционально импедансу Z катушки 8 чувствительного элемента. Из напряжения U2 с помощью электронного устройства 13 получают две ортогональных составляющих U3 и U4.
Напряжение U3 используется для управления управляемым источником 14 напряжения, подпитывающим компенсационную катушку 7 системы 5 катушек постоянным током I_. В результате с помощью компенсационной катушки 7 создается постоянное магнитное поле, которое вместе с магнитным полем постоянного магнита 4 и переменным полем катушки 6 чувствительного элемента создает результирующее магнитное поле. Величина постоянного тока I_ измеряется с помощью падения напряжения на постоянном сопротивлении 15 с помощью интегратора 16. Сигнал на выходе «out 1» интегратора 16 используется для определения изменений расстояния между объектом 2 измерения и чувствительным элементом 3.
Управляемый источник 14 напряжения может быть выполнен различными способами. Использованы могут быть цифроаналоговый преобразователь или цифровой потенциометр, управляемые сигналом U3. Возможный вариант выполнения изображен на фиг. 8 и подробнее будет описан ниже.
Вторая составляющая U4 напряжения, формируемая электронным устройством из напряжения U2, используется для синхронизации осциллятора 10. Благодаря этому напряжение U1, выдаваемое осциллятором 10, и напряжение U4 являются синхронными.
Сенсорное устройство 1 могло бы быть использовано в замкнутом контуре регулирования, причем сигнал U3 является управляющим воздействием, определяемым как разность между заданной величиной в памяти электронного устройства 13 и напряжением U2. В другом варианте контура регулирования сигнал U3 прерывается, а источник 14 напряжения для достижения определенной величины I_ постоянного тока управляется вручную, например, с клавиатуры. Выходной сигнал формируется на выходе «out 2» электронного устройства 13.
На основе фиг. 2(А), (В), (С) поясняется связь между распределением магнитного поля вдоль пленки 8 и положением h магнита 4. Пленка 8 состоит из нанокристаллического материала и нанесена на основу 17, например, из керамики. На этой фиг. 2 видно также значение коэффициента избыточности. При изменении положения объекта измерения от расстояния h1 до h2 распределение магнитной проницаемости в пленке изменяется только на величину от a-b до g-h. Эта величина уменьшена по сравнению с путем h, пройденным объектом измерения, в соответствии с коэффициентом избыточности, причем коэффициент избыточности равен, например, 3.
На фиг. 2(А) показано устройство, состоящее из пленки 8, нанесенной на основу 17, и с помощью которой может косвенно регулироваться распределение магнитного поля вдоль пленки 8, создаваемого постоянным магнитом 4. Измерительная катушка 18 шириной ∆=3 мм установлена в один слой вокруг основы 17 и пленки 8. При этом измерительная катушка 18 выполнена таким образом, чтобы она могла перемещаться в продольном направлении пленки 8.
Диаграмма, приведенная на фиг. 2(В), показывает величину комплексного импеданса измерительной катушки 18 при перемещении измерительной катушки 18 в направлении x вдоль пленки 8 (длина пленки L=25 мм, ширина - 5 мм и толщина - 0,02 мм). При этом на диаграмме показаны несколько характеристик импеданса, получающихся при различных положениях h объекта 2 измерения относительно пленки 8. Для наглядного пояснения в численном выражении приводятся положения h1=60 мм, h2=50 мм, h3=40 мм и h4=30 мм. Это показывает также, какой диапазон измерений может устанавливаться с помощью такого устройства.
На диаграмме на фиг. 2(С) схематически изображены участки пленки, на которых устанавливается максимальная крутизна характеристики импеданса и тем самым максимальная чувствительность чувствительного элемента, использующего магнитомягкую пленку. При этом участки показаны для положений h1=60 мм, h2=50 мм, h3=40 мм и h4=30 мм. Отчетливо видно, что участки (a-b), (c-d), (e-f) и (g-h) перемещаются пропорционально положению h постоянного магнита 4.
На фиг. 3 относительная чувствительность S в зависимости от положения h объекта 2 измерения изображена более точно. Чувствительность S чувствительного элемента 3 определяется формулой:
S=∆Z/Z:δh,
где ∆Z/Z - относительное изменение импеданса катушки 7 чувствительного элемента 3, а δh - величина шага между отдельными положениями h. Отчетливо видно, что относительная чувствительность S в положении h0 принимает максимальные значения. В области ±∆h вокруг h0 относительная чувствительность S еще имеет значительные величины, а после этого существенно уменьшена.
На фиг. 4 изображена диаграмма характеристик постоянного тока в зависимости от изменения ±∆h положения объекта измерения относительно основного положения h0. На диаграмме показано, что между постоянным током I_ и изменениями ±∆h положения постоянного магнита могла бы быть установлена линейная функциональную зависимость.
На фиг. 5 изображен пример осуществления сенсорного устройства согласно изобретению, состоящего из объекта 2 измерения и чувствительного элемента 3.
Постоянный магнит 4 встроен в корпус объекта 2 измерения таким образом, что направление магнитного поля совпадает с осью перемещения объекта 2 измерения. Чувствительный элемент 3 выполнен плоскостным и содержит основу 17, на которой с обеих сторон установлены две плоские катушки 6 и 7.
В качестве основы 17 могла бы быть использована печатная плата или керамическая подложка, а катушки 6 и 7 могли бы быть выгодным образом изготовлены известными способами, например, нанесены на основу 17 методом трафаретной печати или наклеены на нее.
Основа 17 с катушками 6 и 7 покрыта двумя пластинами 19, 20 из проводящего материала, предпочтительно из алюминия или меди. Ширина «∆» катушек 6 и 7 составляет лишь около 25% длины «l» пленки 8, наклеенной с одной стороны пластины 20. Катушка 6 подпитывается высокочастотным переменным напряжением и служит в качестве измерительной катушки. Компенсационная катушка 7 состоит из нескольких слоев и подпитывается постоянным током.
На фиг. 6 изображен второй пример осуществления чувствительного элемента согласно изобретению. Чувствительный элемент 3 состоит из круглой основы 17, например из пластмассы. Первая многослойная катушка 7, служащая компенсационной катушкой 7 и подпитываемая постоянным током, намотана в пазу вокруг основы 17.
Измерительная катушка 6, подпитываемая высокочастотным переменным током с осциллятора, намотана вдоль основы 17 в один слой и содержит компенсационную катушку 7.
Пленка 8 из нанокристаллического или аморфного материала вклеена внутрь трубки 21. Трубка 21 состоит из материала с высокой электрической проводимостью и одновременно служит корпусом чувствительного элемента. Со стороны объекта 2 измерения трубка 21 покрыта крышкой 23 из проводящего материала, которая, однако, является прозрачной для постоянного магнитного поля (Н=) объекта 2 измерения. Электронный блок 24 обработки встроен в корпус 25, который в соответствии со стандартами EMV должен быть соединен с трубкой 21 и пленкой 8.
Преимуществом этого варианта выполнения является то, что чувствительный элемент 3 полностью капсулирован и экранирован и, например, может быть установлен непосредственно без дополнительного насадка для измерения давления в камере сжатия, например, гидравлического или пневматического цилиндра.
На фиг. 7 изображен вариант выполнения чувствительного элемента 3, в котором постоянный магнит 4 установлен на определенном постоянном расстоянии D от системы 5 катушек чувствительного элемента 3 и не перемещается вместе с объектом 2 измерения.
Объект 2 измерения состоит из ферромагнитной стали и установлен на основном расстоянии h от поверхности чувствительного элемента 3 с возможностью перемещения.
В первом варианте (А) постоянный магнит 4 установлен со стороны системы 5 катушек, противоположной объекту 2 измерения. Это устройство особенно предпочтительно, если с помощью чувствительного элемента 3 небольших размеров, например, с диаметром 10 мм, при хорошей линейности производят измерения в относительно больших диапазонах измерений, например 15 мм.
Во втором варианте (В) постоянный магнит 4 установлен между объектом 2 измерения и системой 5 катушек. Этот вариант может быть успешно применен, если должны измеряться небольшие изменения ∆h положения при относительно большом основном расстоянии h, например 25-30 мм, а диаметр чувствительного элемента 3 равен, например, только 10 мм.
В третьем варианте система 5 катушек чувствительного элемента 3, состоящая из двух катушек 6 и 7, концентрично намотана на основу 17. Между катушками 6 и 7 установлена пленка 8 из магнитомягкого материала, охватывающая катушку 7. Катушка 6 служит в качестве измерительной катушки, импеданс или мнимая составляющая Im Z импеданса которой зависит от расстояния h и измеряется. Катушка 7 подпитывается постоянным током и служит в качестве компенсационной катушки. Кроме того, трубка 26 выполнена из хорошо проводящего материала, например алюминия или меди. В этом случае корпус 25 мог бы быть выполнен с оптимальными затратами из непроводящего материала, например из пластмассы. Постоянный ток мог бы быть подстроен (или установлен) таким образом, чтобы при изменениях ∆h положения между чувствительным элементом 3 и объектом 2 измерения импеданс или Im Z оставались постоянными. В этом случае величина постоянного тока пропорциональна изменениям ∆h положения. Объект измерения мог бы иметь профилированную поверхность, например, шестерни или индуктора, благодаря чему с помощью чувствительного элемента можно было бы измерять также число оборотов и/или углы.
На фиг. 8 изображена принципиальная схема управляемого источника постоянного тока для управления компенсационной катушкой устройства согласно фиг. 1. Источник постоянного тока содержит регулируемый электронный цифровой потенциометр 27, управляемый по линии 28 управления с помощью следящего управления или с клавиатуры. Цифровой потенциометр 27 симметрично подпитывается постоянным напряжением с двух операционных усилителей 29, 30, причем между неинвертирующими входами операционных усилителей 29, 30 приложено эталонное напряжение URef. Ползунок 31 цифрового потенциометра 27 соединен с неинвертирующим входом другого операционного усилителя 32. Между выходом операционного усилителя 32 и его инвертирующим входом установлена катушка 33, по которой протекает постоянный ток I_. Здесь катушка 33 образована компенсационной катушкой 7 схемы на фиг. 1. Величина постоянного тока I_ определяется сопротивлением 34 в зависимости от напряжения на выходе операционного усилителя 32, которое, в свою очередь, зависит от положения ползунка 31 цифрового потенциометра 27. При этом схема рассчитана таким образом, чтобы при среднем положении ползунка 31 ток I_ равнялся нулю. В зависимости от положения ползунка 31 может выдаваться положительный или отрицательный ток. В зависимости от положения рабочей точки чувствительного элемента полярность и величина постоянного тока I_ устанавливаются таким образом, что в диапазоне ±∆h достигается постоянная чувствительность чувствительного элемента.
Напряжение, падающее на сопротивлении 34, измеряется интегратором, состоящим из операционного усилителя 35, сопротивления 36 и емкости 37.
Наконец, следует заметить, что поясняемые выше примеры осуществления лишь поясняют претензионное техническое решение, однако не ограничивают его примерами осуществления.
Перечень ссылочных позиций
1. Сенсорное устройство
2. Объект измерения
3. Чувствительный элемент
4. Магнит
5. Система катушек
6. Катушка чувствительного элемента
7. Компенсационная катушка
8. Пленка
9. Электрический контакт (пленка)
10. Осциллятор
11. Схема обработки
12. Усилитель
13. Электронное устройство
14. Источник напряжения
15. (Измерительное) сопротивление
16. Интегратор
17. Основа
18. Измерительная катушка
19. Основа
20. Основа
21. Трубка
22. Электрический контакт (трубка)
23. Крышка
24. Блок обработки
25. Корпус
26. Проводящая поверхность
27. Цифровой потенциометр
28. Линия управления
29. Операционный усилитель
30. Операционный усилитель
31. Ползунок (потенциометра)
32. Операционный усилитель
33. Катушка
34. Сопротивление
35. Операционный усилитель
36. Сопротивление
37. Емкость
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ И УСТРОЙСТВО ДЛЯ РЕГИСТРАЦИИ МАГНИТНЫХ ПОЛЕЙ | 2011 |
|
RU2554592C2 |
| СЕНСОРНОЕ УСТРОЙСТВО И СПОСОБ ДЛЯ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ И/ИЛИ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ОБЪЕКТА ИЗМЕРЕНИЯ | 2009 |
|
RU2497080C2 |
| ГРАВИМЕТР | 1996 |
|
RU2096813C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ МАГНИТНОГО ПАРАМЕТРА В СЕРДЕЧНИКЕ | 2010 |
|
RU2524056C2 |
| СПОСОБ ТЕМПЕРАТУРНОЙ КОМПЕНСАЦИИ ИНДУКТИВНОГО ДАТЧИКА ПОЛОЖЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2013 |
|
RU2555200C2 |
| КОМПЕНСАЦИОННЫЙ АКСЕЛЕРОМЕТР | 1993 |
|
RU2039994C1 |
| ПОЗИЦИОННОЕ КОДИРУЮЩЕЕ УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ПОЛОЖЕНИЯ ПОДВИЖНОЙ ЧАСТИ МЕХАНИЗМА | 2015 |
|
RU2620908C2 |
| ИЗМЕРИТЕЛЬНОЕ УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ МАГНИТНЫХ СВОЙСТВ ОКРУЖАЮЩЕЙ СРЕДЫ ИЗМЕРИТЕЛЬНОГО УСТРОЙСТВА | 2013 |
|
RU2648010C2 |
| Датчик давления | 1990 |
|
SU1778565A1 |
| Парамагнитный датчик | 2021 |
|
RU2778032C1 |






Изобретение относится к способу определения положения и/или изменения положения объекта измерения относительно чувствительного элемента. Сущность изобретения заключается в том, что в способе определения положения и/или изменения положения объекта измерения относительно чувствительного элемента (3) чувствительный элемент (3) предпочтительно представляет собой катушку (6) чувствительного элемента (3), подпитываемую переменным током, при этом посредством магнита (4), приданного объекту (2) измерения, в магнитомягкой пленке (8), магнитная проницаемость которой изменяется под воздействием магнитного поля в зависимости от напряженности магнитного поля и которая находится в области влияния чувствительного элемента (3), вызывается изменение магнитной проницаемости пленки (8) и что изменение магнитной проницаемости пленки (8) определяется по его обратному действию на чувствительный элемент (3), и отсюда определяется положение и/или изменение положения объекта (2) измерения относительно чувствительного элемента (3), причем компенсационная катушка (7), возбуждаемая постоянным током, создает магнитное поле, с помощью которого оказывается воздействие на магнитную проницаемость пленки (8) или части пленки (8). Соответствующим образом выполнено измерительное устройство. Технический результат - повышение точности и упрощение конструкции устройства. 4 н. и 13 з.п. ф-лы, 8 ил.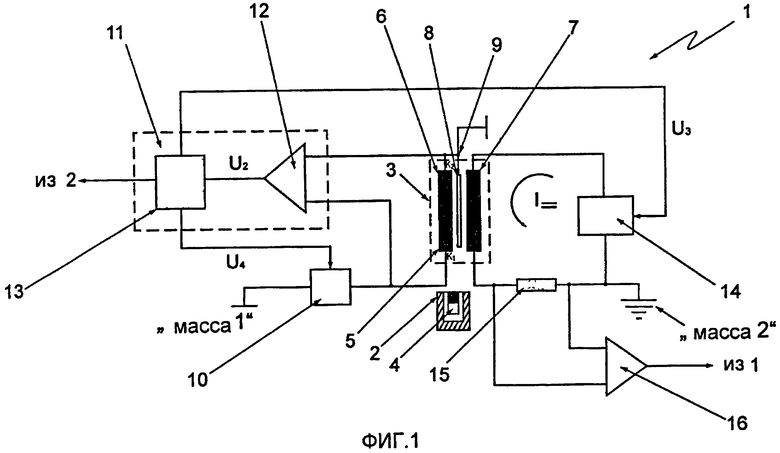
1. Способ определения положения и/или изменения положения объекта измерения относительно чувствительного элемента (3), причем чувствительный элемент (3) предпочтительно представляет собой катушку (6) чувствительного элемента (3), подпитываемую переменным током, отличающийся тем, что посредством магнита (4), приданного объекту (2) измерения, в магнитомягкой пленке (8), магнитная проницаемость которой изменяется под воздействием магнитного поля в зависимости от напряженности магнитного поля и которая находится в области влияния чувствительного элемента (3), вызывается изменение магнитной проницаемости пленки (8), и что изменение магнитной проницаемости пленки (8) определяется по его обратному действию на чувствительный элемент (3), и отсюда определяется положение и/или изменение положения объекта (2) измерения относительно чувствительного элемента (3), причем компенсационная катушка (7), возбуждаемая постоянным током, создает магнитное поле, с помощью которого оказывается воздействие на магнитную проницаемость пленки (8) или части пленки (8).
2. Способ по п.1, отличающийся тем, что постоянный ток может регулироваться таким образом, что устанавливается, по существу, постоянное магнитное поле компенсационной катушки (7).
3. Способ по п.1 или 2, отличающийся тем, что для калибровки чувствительного элемента (3) выполняются следующие этапы: позиционирование объекта (2) измерения в множестве положений h относительно чувствительного элемента (3) с величиной шага δh, подача переменного тока на катушку (6) чувствительного элемента, определение импеданса Z и/или относительного изменения Z/ΔZ импеданса катушки (6) чувствительного элемента в каждом положении h, определение характеристической кривой, описывающей зависимость относительной чувствительности S катушки (6) чувствительного элемента от положения h объекта (2) измерения, где
S=ΔZ/Z:δh,
определение положения h0 на характеристической кривой, в котором относительная чувствительность S принимает максимальные значения, запись величины комплексного импеданса Z0, соответствующей положению h0, в энергонезависимую память,
подача постоянного тока на компенсационную катушку (7),
определение импеданса Z и/или относительного изменения Z/ΔZ импеданса катушки (6) чувствительного элемента в каждом положении h, причем на пленку (8) воздействуют магнитные поля катушки (6) чувствительного элемента, компенсационной катушки (7) и магнита (4), изменение постоянного тока в диапазоне ±Δh измерений до достижения записанной заданной величины импеданса,
определение зависимости постоянного тока от изменения положения объекта (2) измерения.
4. Способ по п.1, отличающийся тем, что для обнаружения обратного действия на катушку (6) чувствительного элемента, вызванного изменением магнитной проницаемости пленки (8), проводится измерение импеданса или его изменения, причем могут определяться действительная составляющая Re{Z} и мнимая составляющая Im{Z} комплексного импеданса катушки (6) чувствительного элемента (3), а также частное D=Re{Z}/Im{Z}.
5. Способ по п.4, отличающийся тем, что величина постоянного тока устанавливается посредством компенсационной катушки (7) в системе следящего управления с помощью замкнутого контура регулирования, причем частное D может быть использовано в контуре регулирования в качестве заданной величины, и/или причем мнимая составляющая Im{Z} может быть использована для определения изменения положения между объектом (2) измерения и чувствительным элементом (3), причем D предпочтительно удерживается постоянным, и/или причем сила постоянного тока, протекающего в компенсационной катушке (7), может быть использована для определения положения.
6. Способ по п.5, отличающийся тем, что благодаря регулированию максимальная относительная чувствительность S чувствительного элемента (3) удерживается постоянной во всем диапазоне измерений или в его части.
7. Измерительное устройство для определения положения и/или изменения положения объекта (2) измерения относительно чувствительного элемента (3), причем объекту (2) измерения предпочтительно придан магнит (4) и причем чувствительный элемент (3) предпочтительно содержит катушку (6) чувствительного элемента, подпитываемую переменным током, в частности, для осуществления способа по любому из пп.1-6, отличающееся тем, что в области влияния чувствительного элемента (3) расположена пленка (8) из магнитомягкого материала, причем магнитная проницаемость пленки (8) под влиянием магнитного поля изменяется в зависимости от напряженности магнитного поля, и что предусмотрена схема (11) обработки, с помощью которой изменение магнитной проницаемости пленки (8) определяется по его обратному действию на чувствительный элемент (3) и делается вывод в отношении положения и/или изменения положения объекта (2) измерения относительно чувствительного элемента (3), причем предусмотрена компенсационная катушка (7), возбуждаемая постоянным током и влияющая на магнитную проницаемость пленки (8) или части пленки (8).
8. Измерительное устройство по п.7, отличающееся тем, что магнитные поля катушки (6) чувствительного элемента (3), компенсационной катушки (7) и магнита (4) могут складываться в результирующее магнитное поле, причем катушка (6) чувствительного элемента может быть гальванически отделена от компенсационной катушки (7).
9. Измерительное устройство по п.8, отличающееся тем, что сила постоянного тока регулируется, и/или что магнит (4) включает в себя постоянный магнит и/или электромагнит, и/или что пленка (8) находится в емкостной связи с катушкой (6) чувствительного элемента и имеет электрический контакт (9), причем между контактом (9) пленки (8) и выводом катушки (6) чувствительного элемента может быть включен осциллятор (10).
10. Измерительное устройство по п.9, отличающееся тем, что второй вывод катушки (6) чувствительного элемента соединен со входом усилителя (12) схемы (11) обработки, причем сигнал U2, выдаваемый усилителем (12), пропорционален относительному изменению ΔZ/Z импеданса катушки (6) чувствительного элемента, причем для определения двух ортогональных компонентов напряжения U2 может быть предусмотрено электронное устройство (13), причем один из обоих компонентов пропорционален действительной составляющей Re{Z}, а другой - мнимой составляющей Im{Z} комплексного импеданса катушки (6) чувствительного элемента, и/или причем электронное устройство (13) при необходимости формирует сигналы U3 и U4, причем с помощью сигнала U4 синхронизируется осциллятор (10), а сигнал U3 может быть использован для управления источником (14) напряжения.
11. Измерительное устройство по п.10, отличающееся тем, что электронное устройство (13) содержит аналого-цифровой преобразователь, процессор и память и через оптоэлектронный элемент связи соединяется со входом источника (14) напряжения.
12. Измерительное устройство по любому из пп.7-11, отличающееся тем, что чувствительный элемент (3) установлен на круглой основе (20), и/или что чувствительный элемент (3) выполнен плоскостным и установлен предпочтительно на плоской основе, и/или что в результате изменения магнитной проницаемости пленки (8) глубина проникновения электромагнитного поля, создаваемого катушкой (6) чувствительного элемента, увеличивается, и что пленка (8) по своей длине рассчитана таким образом, чтобы электромагнитное поле на участках с низкой магнитной проницаемостью могло проходить через пленку (8), и/или что предусмотрена проводящая поверхность (26), расположенная вблизи пленки (8) и со стороны, противоположной катушке (6) чувствительного элемента, причем электромагнитное поле, пронизывающее пленку (8), может индуцировать в проводящей поверхности вихревые токи.
13. Измерительное устройство для определения положения и/или изменения положения объекта (2) измерения относительно чувствительного элемента (3), причем объекту (2) измерения предпочтительно придан магнит (4) и причем чувствительный элемент (3) предпочтительно содержит катушку (6) чувствительного элемента, подпитываемую переменным током, отличающееся тем, что в области влияния чувствительного элемента (3) расположена пленка (8) из магнитомягкого материала, причем магнитная проницаемость пленки (8) под влиянием магнитного поля изменяется в зависимости от напряженности магнитного поля и причем перемещение объекта (2) измерения осуществляется, по существу, параллельно направлению протяженности пленки (8), и что изменение магнитной проницаемости пленки (8) определяется по его обратному действию на чувствительный элемент (3), а отсюда делается вывод в отношении положения и/или изменения положения объекта (2) измерения относительно чувствительного элемента (3), причем в пленке сформированы область высокой магнитной проницаемости, область пониженной магнитной проницаемости и переходная область между упомянутыми двумя областями, и при этом в зависимости от расстояния между чувствительным элементом и объектом измерения переходная область смещается вдоль пленки.
14. Измерительное устройство по п.13, отличающееся тем, что предусмотрена схема (11) обработки, с помощью которой определяется изменение магнитной проницаемости пленки (8) по его обратному действию на катушку (6) чувствительного элемента, причем магнит (4) может включать в себя постоянный магнит и/или электромагнит, и/или причем пленка (8) может находиться в емкостной связи с катушкой (6) чувствительного элемента и иметь электрический контакт (9), причем между контактом (9) пленки (8) и выводом катушки (6) чувствительного элемента включен осциллятор (10).
15. Измерительное устройство по п.13, отличающееся тем, что второй вывод катушки (6) чувствительного элемента соединен с усилителем (12) схемы (11) обработки, причем сигнал U2 на выходе усилителя (12) пропорционален изменению ΔZ/Z импеданса катушки (6) чувствительного элемента.
16. Измерительное устройство по любому из пп.13-15, отличающееся тем, что чувствительный элемент (3) установлен на круглой основе (20), и/или что чувствительный элемент (3) выполнен плоскостным и установлен предпочтительно на плоской основе, и/или что в результате изменения магнитной проницаемости пленки (8) глубина проникновения электромагнитного поля, создаваемого катушкой (6) чувствительного элемента, увеличивается, и что пленка (8) по своей толщине рассчитана таким образом, чтобы электромагнитное поле на участках с низкой магнитной проницаемостью могло проходить через пленку (8), и/или что предусмотрена проводящая поверхность (26), расположенная вблизи пленки (8) и со стороны, противоположной катушке (6) чувствительного элемента, причем электромагнитное поле, пронизывающее пленку (8), может индуцировать в проводящей поверхности вихревые токи.
17. Способ определения положения и/или изменения положения объекта измерения относительно чувствительного элемента (3), причем чувствительный элемент (3) предпочтительно представляет собой катушку (6) чувствительного элемента (3), подпитываемую переменным током, отличающийся тем, что посредством магнита (4), приданного объекту (2) измерения, в магнитомягкой пленке (8), магнитная проницаемость которой изменяется под воздействием магнитного поля в зависимости от напряженности магнитного поля и которая находится в области влияния чувствительного элемента (3), вызывается изменение магнитной проницаемости пленки (8), и что изменение магнитной проницаемости пленки (8) определяется по его обратному действию на чувствительный элемент (3), и отсюда определяется положение и/или изменение положения объекта (2) измерения относительно чувствительного элемента (3), причем перемещение объекта (2) измерения осуществляется, по существу, параллельно направлению протяженности пленки (8), и при этом в пленке сформированы область высокой магнитной проницаемости, область пониженной магнитной проницаемости и переходная область между упомянутыми двумя областями, и при этом в зависимости от расстояния между чувствительным элементом и объектом измерения переходная область смещается вдоль пленки.
| Топчак-трактор для канатной вспашки | 1923 |
|
SU2002A1 |
| US 6605939 B1, 12.08.2003 | |||
| Устройство для автоматического сведения валов иглофрез иглофрезерной машины | 1983 |
|
SU1158266A1 |
| ИНДУКЦИОННЫЙ ДЕТЕКТОР ПОЛОЖЕНИЯ | 2002 |
|
RU2264599C2 |

