ОБЛАСТЬ ТЕХНИКИ
Данное изобретение относится, в общем, к измерениям сигналов в сетях беспроводной связи и, в частности, к архитектурам беспроводных сетей, которые используют межчастотные измерения сигналов от множественных сот для позиционирования, определения местоположения и основанных на местоположении служб.
УРОВЕНЬ ТЕХНИКИ
При своем зарождении радиотелефония была предназначена и использовалась для речевой связи. По мере того, как индустрия бытовой электроники продолжала развиваться, и возможности процессоров возрастали, все больше устройств стали доступными для использования беспроводной передачи данных, и стали доступными все больше приложений, которые работают на основе таких передаваемых данных. Особенно отметим Интернет и локальные сети (LAN). Эти два нововведения дали возможность множественным пользователям и множественным устройствам осуществлять связь и обмениваться данными между различными устройствами и типами устройств. С появлением этих устройств и возможностей, пользователи (как коммерческие, так и частные) обнаружили необходимость в передаче данных, а также речи, от мобильных местоположений.
Инфраструктура и сети, которые поддерживают эту передачу речи и данных, развивались аналогично. Ограниченные приложения данных, такие как обмен текстовыми сообщениями, были введены в так называемых «2G» системах, таких как глобальная система мобильной связи (GSM). Пакетные данные по системам радиосвязи стали более используемыми в GSM с добавлением системы пакетной радиосвязи общего назначения (GPRS). 3G системы и затем радиокоммуникации даже с более высокой полосой частот, введенные посредством стандартов универсального наземного радиодоступа (UTRA), сделали приложения, подобные исследованию Интернета, более легко доступными для миллионов пользователей.
Даже по мере того, как новые сетевые проекты внедряются производителями сетей, будущие системы, которые обеспечивают большие пропускные способности для устройств конечных пользователей, находятся в стадии обсуждения и развития. Например, так называемый проект стандартизации долгосрочного развития (LTE) проекта партнерства производителей сотовой связи 3-го поколения (3GPP) предназначен для обеспечения технического базиса для радиосвязи в будущие десятилетия. В числе прочего в отношении LTE систем отметим, что они будут обеспечивать передачи нисходящей линии связи (т.е. в направлении передачи от сети к мобильному терминалу), использующие ортогональное мультиплексирование с частотным разделением (OFDM) в качестве формата передачи, и будут обеспечивать передачи восходящей линии связи (т.е. в направлении передачи от мобильного терминала к сети), использующие множественный доступ с частотным разделением (FDMA) с единственной несущей.
Способность идентификации географического местоположения пользователя в сети дала возможность осуществить большое разнообразие коммерческих и некоммерческих служб, например, поддержку навигации, организацию социальной сети, организацию рекламирования со знанием местоположения, вызовов для экстренных случаев и т.д. Различные службы могут иметь различные требования точности позиционирования, налагаемые данным приложением. Кроме того, в некоторых странах существуют некоторые регуляторные требования на точность позиционирования для базовых экстренных служб, например, регуляторные требования федеральной комиссии связи (FCC) для Е911 служб в США.
Во многих средах, положение пользовательского терминала может быть точно оценено посредством использования способов позиционирования, основанных на GPS (системе глобального позиционирования). В данное время сети также часто имеют возможность поддержки UE для осуществления возможности выполнения терминалом измерений при гораздо более низком уровне чувствительности приемника и улучшают «холодный» запуск GPS или производительность запуска (поддерживаемое GPS позиционирование, или А-GPS). GPS или A-GPS приемники, однако, необязательно могут быть доступными во всех беспроводных терминалах. Кроме того, известно, что GPS часто терпит неудачу во внутренних средах и городских каньонах из-за отсутствия спутниковой зоны обслуживания. Дополнительный способ наземного позиционирования, названный «наблюдаемая временная разница прибытия» (OTDOA), поэтому стандартизируется посредством 3GPP.
При помощи OTDOA некоторый терминал измеряет разности временного согласования для опорных сигналов нисходящей линии связи, принятых от множественных отдельных местоположений. Для каждой (измеряемой) соседней соты, UE измеряет временную разницу опорного сигнала (RSTD), которая является относительной разницей временного согласования между соседней сотой и опорной сотой. Оценка положения UE тогда находится как пересечение гипербол, соответствующих измеренным RSTD. По меньшей мере три измерения от географически разнесенных базовых станций (BS) с хорошей геометрией необходимы для разрешения для двух координат терминала и смещения синхронизатора приемника. Для того чтобы найти положение, необходимо точное знание местоположений передатчика и смещения временного согласования передачи. Вычисление положения может быть проведено, например, посредством сервера позиционирования (развитого обслуживающего центра определения мобильного местоположения или Е-SMLC в LTE) или UE. Первый подход соответствует поддерживаемому UE режиму позиционирования, тогда как последний соответствует основанному на UE режиму позиционирования.
Для осуществления возможности позиционирования в LTE и облегчения измерений позиционирования правильного качества и для достаточного числа отдельных местоположений, были введены новые физические сигналы, выделенные для позиционирования (опорные сигналы позиционирования, или PRS), и подкадры позиционирования с низкими помехами были определены в 3GPP. PRS передаются с заданной периодичностью в 160, 320, 640 и 1280 мс. PRS передаются от одного антенного порта (R6) согласно заданному образцу, описанному, например, в стандартной спецификации 3GPP TS 36.211, развитый универсальный наземный радиодоступ (Е-UTRA); физические каналы и модуляция, описание которой включено сюда посредством ссылки.
Сдвиг частоты, который является функцией идентичности физической соты (PCI), может быть применен к определенным PRS образцам для генерации ортогональных образцов и моделирования эффективного повторного использования частоты, в количестве шести, что делает возможным значительное снижение помех соседней соты на измеряемые PRS и, таким образом, улучшение измерений позиционирования. Поскольку, для OTDOA позиционирования, необходимо измерить PRS сигналы от множественных отдельных местоположений, UE приемник может быть вынужден иметь дело с PRS сигналами, которые являются гораздо более слабыми, чем сигналы, принятые от обслуживающей соты. Кроме того, без приблизительного знания того, когда во времени ожидается прибытие измеренных сигналов, и что является точным PRS образцом, UE был бы вынужден осуществить поиск сигналов в пределах большого окна, что повлияло бы на время и точность этих измерений, а также на сложность UE. Для облегчения UE измерений, сеть передает данные поддержки для UE, которые включают в себя, среди прочего, список соседних сот, содержащий идентичность физической соты соседних сот, число последовательных подкадров нисходящей линии связи, полосу частот PRS передачи и т.д.
Для облегчения измерений межчастотного позиционирования, когда соседняя сота не находится в данных поддержки на обслуживающей частоте UE, также сигнализируется Е-UTRA номер абсолютного радиочастотного канала (EARFCN) для этой соты. 3GPP стандарт определяет списки соседних сот позиционирования, содержащие вплоть до 24 соседних сот на частоту несущей. Это соты, для которых сеть сигнализирует данные поддержки.
В LTE OTDOA UE измеряет временную разницу опорного сигнала (RSTD), которая бала задана в стандартном документе 3GPP TS 36.214, развитый универсальный наземный радиодоступ (Е-UTRA); измерения физического уровня, описание которого включено сюда посредством ссылки. Эти измерения определяются как для межчастоты, так и для внутричастоты, и проводятся в состоянии RRC_CONNECTED (см. таблицу 1 ниже).
Определение 3GPP RSTD измерения
RRC_CONNECTED межчастотный
Межчастотные измерения, включая RSTD, проводятся во время периодических промежутков межчастотных измерений, которые сконфигурированы таким образом, что каждый промежуток начинается в SFN (номер системного кадра) и подкадре, удовлетворяющем следующему условию:
с Т=MGRP/10, где MGRP означает «период повторения промежутка измерения». Е-UTRAN обеспечивает один образец промежутков измерений с постоянной длительностью промежутков для одновременного контроля всех частотных уровней и RAT. Две конфигурации поддерживаются UE, с MGRP, равным 40 и 80 мс, обе с длиной промежутка измерения, равной 6 мс. На практике, из-за времени переключения, остается менее 6, но по меньшей мере 5 полных подкадров для измерений в каждом таком промежутке измерения. RSTD измерение считается межчастотным измерением, когда опорная сота и/или соседняя сота принадлежит к частоте, которая отличается от частоты несущей обслуживающей соты.
В LTE промежутки измерения конфигурируются сетью для осуществления возможности измерений на других LTE частотах и/или других RAT. Конфигурация промежутков сигнализируется к UE по RRC протоколу как часть конфигурации измерений. В LTE со многими несущими, промежутки межчастотных измерений до сих пор предназначались, в основном, для выполнения измерений мобильности, таких как принятая мощность опорного сигнала (RSRP) и принятое качество опорного сигнала (RSRQ). Эти промежутки измерений дают возможность UE выполнять измерения сигналов синхронизации, т.е. первичных сигналах синхронизации (PSS) и вторичных сигналах синхронизации (SSS), и специфических для соты опорных сигналах (CRS) для осуществления возможности межчастотной передачи обслуживания и совершенствования производительности системы.
Сигналы синхронизации передаются на 62 ресурсных элементах в центр размещенной полосы частот в подкадре 0 и 5. PSS передается в последнем OFDM символе, а SSS передается во втором последнем OFDM символе первого временного слота некоторого подкадра. CRS символы передаются каждый подкадр и по всей полосе частот согласно одному из стандартизированных временно-частотных образцов. Различные соты могут использовать 6 различных сдвигов в частоте, и существует 504 различных сигнала. С 2 ТХ антеннами эффективным повторным использованием для CRS является три.
Как может быть видно из вышеизложенного, как сигналы синхронизации, так и CRS передаются относительно часто, хотя PSS и SSS передаются менее часто, чем CRS. Это оставляет достаточно свободы при решении точного временного согласования промежутков измерений таким образом, что некоторый промежуток мог бы покрывать достаточно символов с сигналами, представляющими интерес, т.е. PSS/SSS и/или CRS. С промежутком измерений в 6 мс, в лучшем случае 2 SSS и 2 PSS символа, могут быть приняты с очень точным временным согласованием, что может быть не очень реалистичным, тогда как захват 1 SSS и 1 PSS символа является возможным без какого-либо ограничения на временное согласование, так как минимальное требуемое эффективное время измерения составляет, в среднем, 5 мс.
В современных технологиях, и благодаря тому факту, что обычно имеется только единственный приемник в большинстве UE, использование промежутков измерений необходимо для проведения межчастотных измерений. В предыдущих решениях, точные временные слоты при выполнении межчастотных измерений обычно определяются сетью на основе некоторых критериев. Например, когда RSRP и/или RSRQ от обслуживающей соты падают ниже некоторого порога, или нет хороших внутричастотных сот-кандидатов для выполнения передачи обслуживания, могут быть выполнены такие межчастотные измерения.
При измерении PSS, SSS и/или CRS на другой частоте (т.е. измерения мобильности), точное временное согласование промежутков межчастотных измерений, в сущности, не ограничена. Однако возникает некоторое количество вопросов, связанных с межчастотными измерениями.
Одним таким вопросом является то, что сконфигурированные промежутки измерений могут быть рассогласованы со случаями позиционирования. Стандартизированный PRS имеет минимальную периодичность в 160 мс, что сильно превышает максимальную длину промежутка межчастотных измерений. Максимальная периодичность PRS случая составляет 1280 мс. Без ограничения на точное временное согласование промежутков измерений, может случиться с высокой вероятностью, что PRS другой частоты будет всегда пропущен, хотя UE будет доверять данным поддержки, принятым от сети, и будет пытаться измерить PRS для определенной соседней соты на определенной частоте. Это, в свою очередь, может вызвать некоторое количество проблем. Например, в случае ложного детектирования, плохое или неточное измерение может использоваться для оценки положения UE или сетью. Кроме того, полезная часть полного времени измерения уменьшается, так как время, потраченное для измерения на другой частоте и поиска PRS сигнала, которого там нет (т.е. вне промежутка измерения), является по существу потерянным и могло бы быть потрачено для измерения других сот. Кроме того, UE не может доверять сети, которая обеспечивает ненадежные данные поддержки и ухудшает полную производительность позиционирования, и UE может, таким образом, также выбрать никогда не проводить измерений межчастотного позиционирования, что делает сигнализацию этой информации бесполезной и потребляет сетевые ресурсы неэффективно.
Другим вопросом, который может возникнуть, является то, что эффективная длина измерения не полностью покрывает максимальную длину случая позиционирования. Это происходит потому, что вплоть до 6 последовательных подкадров может быть сконфигурировано для каждого случая позиционирования, тогда как эффективный период измерения является более коротким чем 6 мс.
Еще одной проблемой со стандартными подходами измерения является то, что промежутки измерений встречаются более часто, чем случаи позиционирования. Периодичность межчастотного измерения составляет либо 40 мс, либо 80 мс, тогда как минимальная PRS периодичность составляет 160 мс. Это означает, что грубо в лучшем случае только одна четвертая (с периодом промежутка в 40 мс) или одна вторая (с периодом промежутка в 80 мс) общего времени промежутков измерений полезно тратится для PRS измерений, тогда как другое время теряется, причем это время могло бы быть потрачено для измерения сот на других частотах.
Одним решением этих проблем с межчастотными измерениями было бы ограничение измерений позиционирования только внутричастотными. Однако такое решение является нежелательным, так как оно недостаточно использует доступную технологию, например, включая способность UE измерять другую частоту; RSTD измерение, стандартизированное посредством RAN1 как для внутричастотного измерения, так и для межчастотного измерения, уже согласованной поддержки сигнализации для межчастотных измерений (например, EARFCN индикатор); информацию, доступную в сети, и возможность в сети осуществить межчастотные измерения, работающие также для позиционирования; многоуровневую сетевую структуру, где различные уровни могли бы работать на различных частотах, что является также более эффективным с точки зрения координации помех; работу сети со многими несущими, что было успешно использовано в более ранних поколениях и т.д., и то, что помехи на различных уровнях частоты несущей могут быть различными, и в некоторых сценариях может быть легче найти достаточные соты на межчастоте для измерений позиционирования.
Соответственно, было бы желательно обеспечить способы, устройства, системы и программное обеспечение, которые избегают вышеописанных проблем и недостатков и дают возможность осуществить межчастотные измерения, например, для позиционирования, в промежутках измерений.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Согласно некоторому варианту осуществления, обеспечен способ осуществления возможности межчастотных измерений временной разницы опорных сигналов (RSTD) у опорных сигналов. Этот способ включает в себя генерацию, посредством сетевого узла для оборудования пользователя, списка межчастотных соседей из соседних сот, предназначенных для измерения, каждая из которых удовлетворяет условию выравнивания и достаточному времени измерения. Согласно условию выравнивания, подкадры первого сигнала, имеющего первую частоту, передаваемые через опорную соту, связанную с этим оборудованием пользователя, являются по меньшей мере одним из (а) синхронизированных с, (b) имеют известное смещение относительно или (с) имеют случайное смещение, меньшее, чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через каждую одну из соседних сот. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале. Этот способ также включает в себя передачу списка межчастотных соседей к оборудованию пользователя.
Согласно другому варианту осуществления, некоторый сетевой узел имеет интерфейс, выполненный с возможностью связываться с оборудованием пользователя через соты, и процессор. Этот процессор, который подключен к этому интерфейсу, выполнен с возможностью управления этим интерфейсом для передачи по направлению к оборудованию пользователя через опорную соту списка межчастотных соседей, который включает в себя информацию о соседних сотах, каждая из которых удовлетворяет условию выравнивания, и достаточное время измерения. Согласно условию выравнивания, подкадры первого сигнала, имеющего первую частоту, переданные через опорную соту, связанную с оборудованием пользователя, являются по меньшей мере одним из (а) синхронизированных с, (b) имеют известное смещение относительно или (с) имеют случайное смещение, меньшее, чем одна вторая подкадра относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через каждую одну из соседних сот. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале.
Согласно другому варианту осуществления, обеспечен способ выполнения межчастотных измерений временной разницы опорных сигналов (RSTD) посредством оборудования пользователя. Этот способ включает в себя прием первого сигнала, имеющего первую частоту, через опорную соту, связанную с оборудованием пользователя, и второго сигнала, имеющего вторую частоту, принятого через соседнюю соту, включенную в список межчастотных соседей. Этот способ дополнительно включает в себя выполнение первых межчастотных измерений временной разницы опорных сигналов у опорных сигналов положения упомянутой соседней соты во время первых промежутков измерений, которые перекрываются с подкадрами позиционирования второго сигнала. Эта соседняя сота включается в список межчастотных соседей, предназначенный для позиционирования, если она удовлетворяет условию выравнивания и достаточному времени измерения. Согласно условию выравнивания, подкадры первого сигнала, имеющего первую частоту, передаваемого через опорную соту, связанную с оборудованием пользователя, являются одним из (а) синхронизированных с, (b) имеют известное смещение относительно или (с) имеют случайное смещение, меньшее, чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через каждую одну из соседних сот. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале. Промежутки измерения встречаются более часто, чем опорные сигналы положения.
Согласно другому варианту осуществления, оборудование пользователя имеет интерфейс и процессор. Этот интерфейс выполнен с возможностью приема первого сигнала, имеющего первую частоту, через опорную соту и второго сигнала, имеющего вторую частоту, принятого через соседнюю соту, включенную в список межчастотных соседей, обеспеченный посредством сетевого узла. Этот процессор, который подключен к этому интерфейсу, выполнен с возможностью выполнения первых межчастотных измерений временной разницы опорных сигналов (RSTD) у опорных сигналов положения, во время первых промежутков измерения, которые перекрываются с подкадрами позиционирования второго сигнала. Эта соседняя сота включается в список межчастотных соседей, предназначенный для позиционирования, если она удовлетворяет условию выравнивания и достаточному времени измерения. Согласно условию выравнивания, подкадры первого сигнала, имеющего первую частоту, передаваемого через опорную соту, связанную с оборудованием пользователя, являются одним из (а) синхронизированных с, (b) имеют известное смещение относительно или (с) имеют случайное смещение, меньшее, чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через каждую одну из соседних сот. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале. Промежутки измерения встречаются более часто, чем опорные сигналы положения.
Согласно другому варианту осуществления, обеспечен способ выполнения измерений посредством оборудования пользователя, которое принимает первый сигнал, имеющий первую частоту, через опорную соту, и вторые сигналы, имеющие соответствующие вторые частоты, через соседние соты. Этот способ включает в себя выполнение межчастотных измерений временной разницы опорных сигналов (RSTD) на первых опорных сигналах, которые передаются более часто, чем вторые опорные сигналы, во время промежутков измерения, когда подкадры первого сигнала и соответствующие подкадры второго сигнала не являются синхронизированными.
Согласно другому варианту осуществления, оборудование пользователя включает в себя интерфейс и процессор. Этот интерфейс выполнен с возможностью приема первого сигнала, имеющего первую частоту, через опорную соту и вторых сигналов, имеющих соответствующие вторые частоты, через соседние соты. Этот процессор, который подключен к этому интерфейсу, выполнен с возможностью выполнения межчастотных измерений временной разницы опорных сигналов (RSTD) на первых сигналах, которые передаются более часто, чем вторые опорные сигналы, когда подкадры в первом сигнале и соответствующие подкадры второго сигнала не являются синхронизированными.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Сопутствующие чертежи, которые включены и составляют часть данной спецификации, иллюстрируют один или несколько вариантов осуществления и, вместе с этим описанием, объясняют эти варианты осуществления. На этих чертежах:
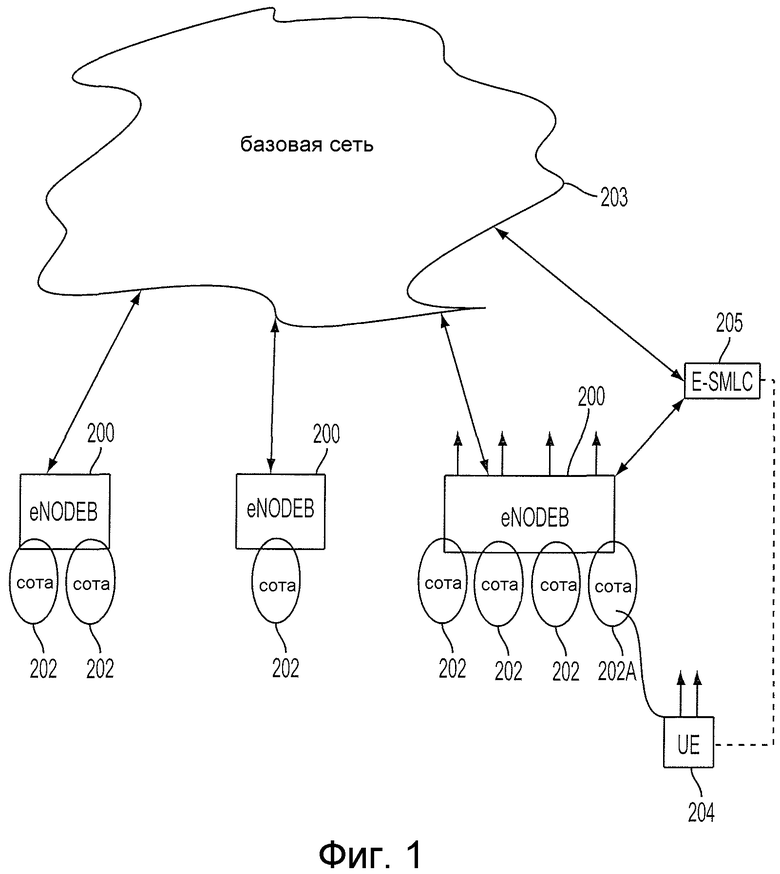
Фиг. 1 иллюстрирует некоторую систему радиосвязи.
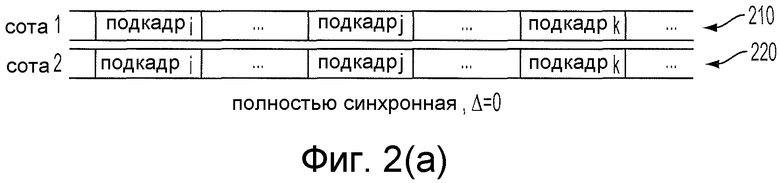
Фиг. 2(а) иллюстрирует выравнивание кадров в полностью синхронизированных сетях.
Фиг. 2(b) иллюстрирует выравнивание кадров в асинхронных сетях с известным смещением.
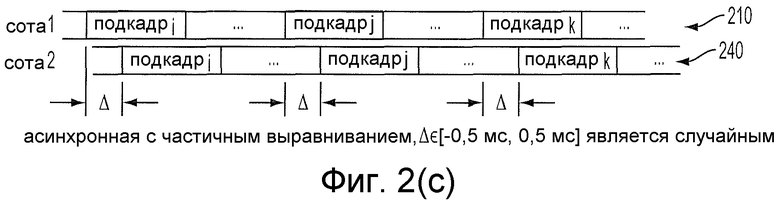
Фиг. 2(с) иллюстрирует выравнивание кадров в асинхронных сетях с частичным выравниванием.
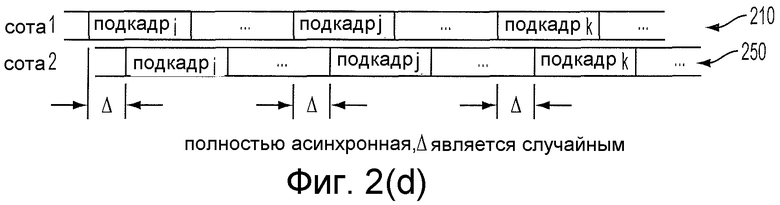
Фиг. 2(d) иллюстрирует выравнивание кадров в полностью асинхронных сетях.
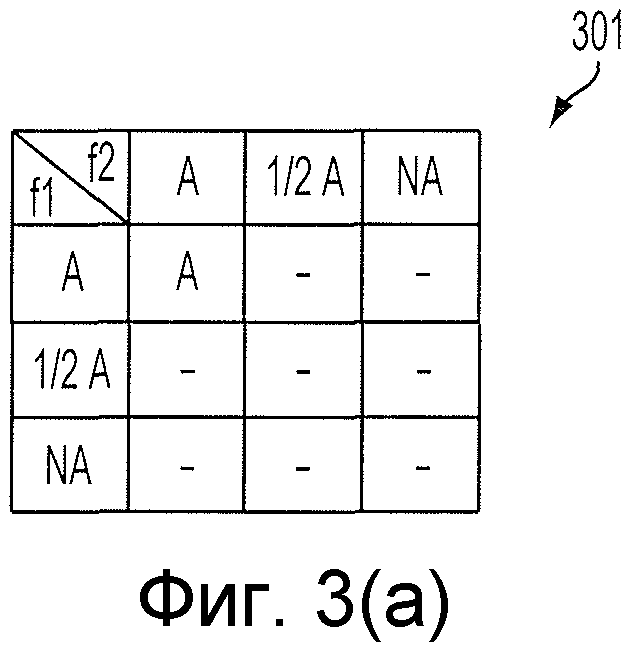
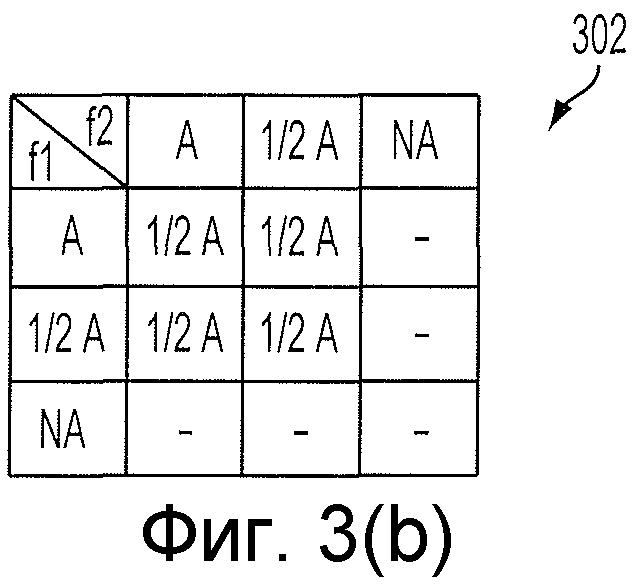
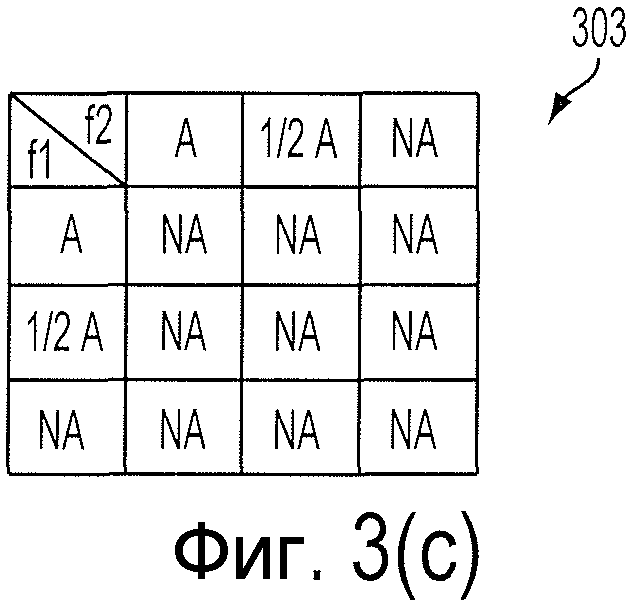
Фиг. 3(а), 3(b) и 3(с) иллюстрируют классы выравнивания, основанные на выравнивании внутри- и межчастот f1 и f2.
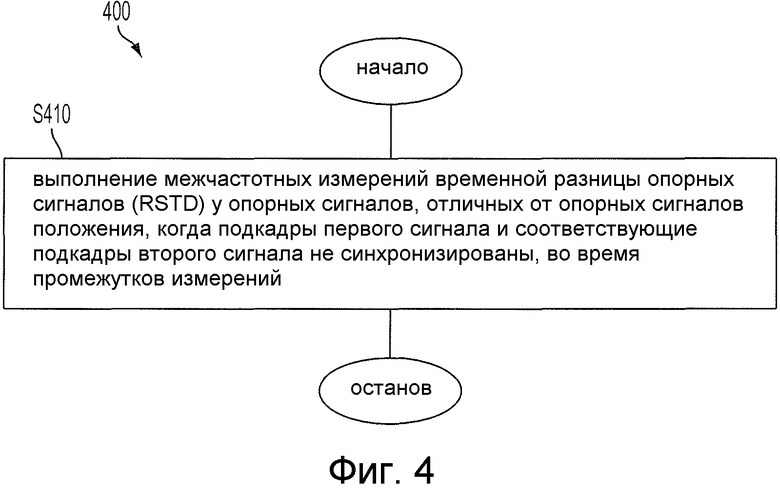
Фиг. 4 является блок-схемой способа для выполнения измерений позиционирования (например, RSTD) согласно некоторому варианту осуществления.
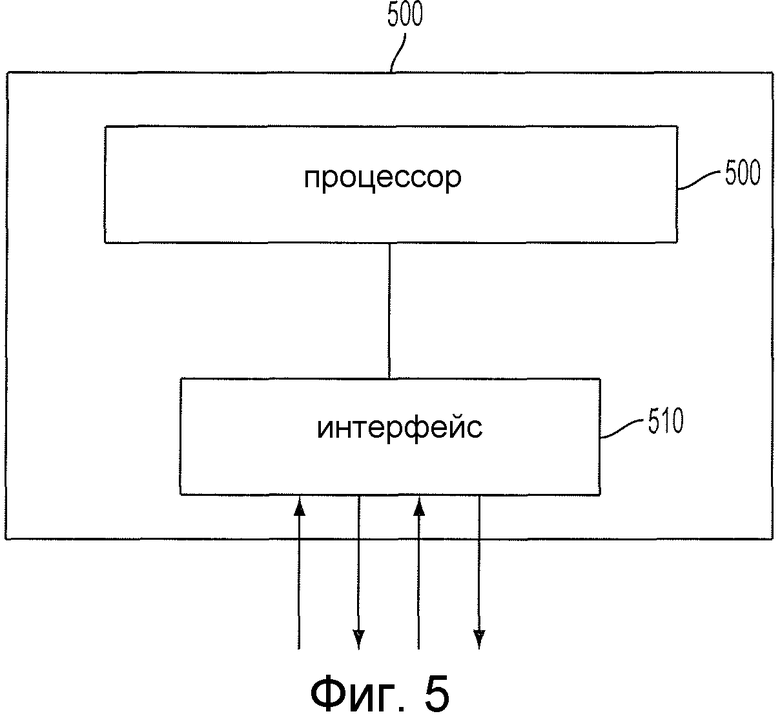
Фиг. 5 иллюстрирует оборудование пользователя согласно некоторому варианту осуществления.
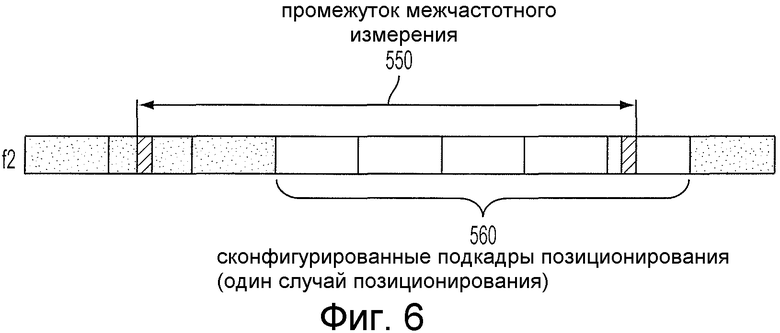
Фиг. 6 иллюстрирует пример перекрытия во времени промежутка измерения с подкадрами позиционирования.
Фиг. 7 является блок-схемой способа, позволяющего осуществить межчастотные измерения разницы опорных сигналов.
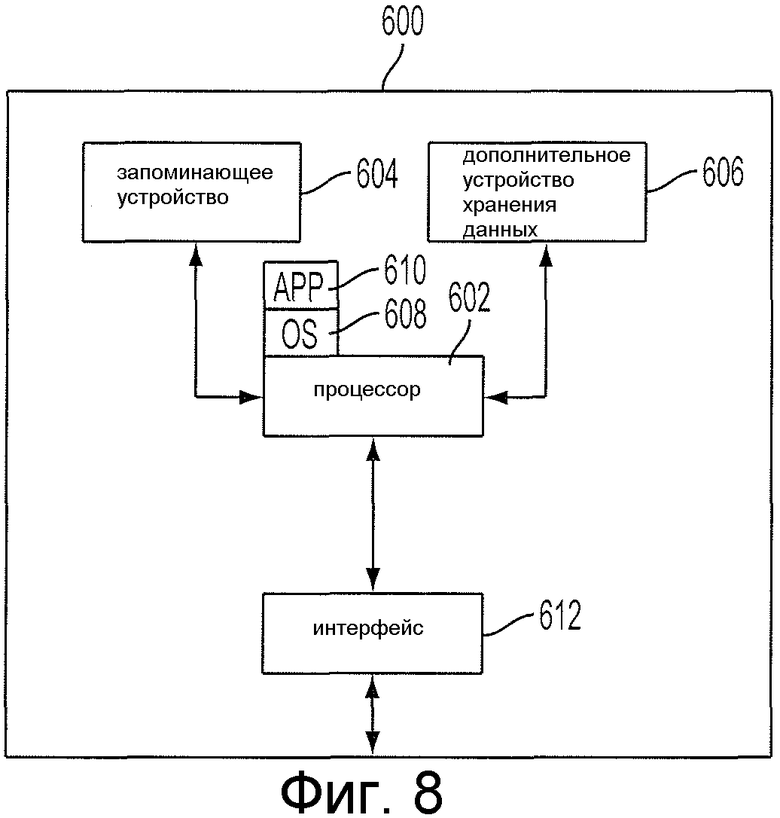
Фиг. 8 является схематичным графическим изображением оборудования пользователя или базовой станции, согласно вариантам осуществления.
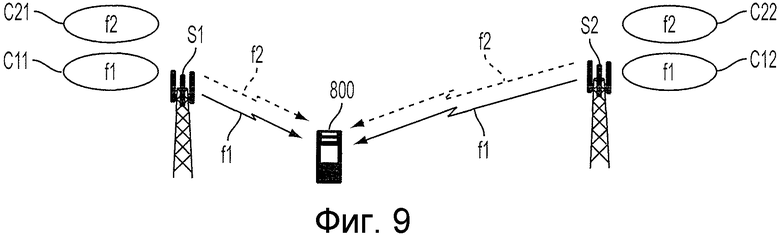
Фиг. 9 является иллюстрацией некоторой системы, в которой соты, имеющие различные частоты, являются совместно расположенными; и
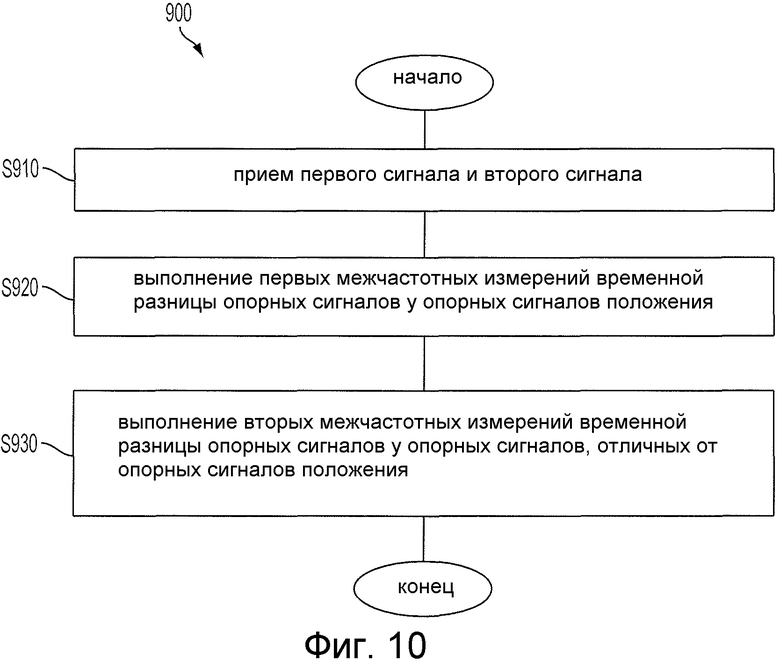
Фиг. 10 является блок-схемой способа выполнения межчастотных измерений временной разницы опорных сигналов согласно некоторому варианту осуществления.
ПОДРОБНОЕ ОПИСАНИЕ
Следующее описание примерных вариантов осуществления данного изобретения относится к сопутствующим чертежам. Одни и те же ссылочные позиции в различных чертежах идентифицируют одни и те же или подобные элементы. Следующее подробное описание не ограничивает данное изобретение. Вместо этого, объем данного изобретения определяется прилагаемой формулой изобретения.
Даже хотя PRS были конкретно предназначены для измерений позиционирования и, в общем, характеризуются более хорошим качеством сигналов, чем другие опорные сигналы, данный стандарт не обязывает к использованию PRS. Другой тип опорных сигналов, например, специфические для соты опорные сигналы (например, CRC), могут в принципе также использоваться для выполнения измерений позиционирования.
Согласно вариантам осуществления RSTD межчастотные измерения задействуются посредством, например, гарантирования достаточного перекрытия промежутков межчастотных измерений и подкадров позиционирования или посредством межчастотных измерений сигналов, отличающихся от PRS сигнала (например, CRC). Согласно некоторым вариантам осуществления, только те соты, которые удовлетворяют условию достаточного перекрытия, могут рассматриваться для включения в список межчастотных соседей, предназначенный для позиционирования. Установление условия достаточного перекрытия, способы для выравнивания промежутков измерений и подкадров позиционирования, а также способы для запуска промежутков измерений для позиционирования (если это необходимо) также являются аспектами вариантов осуществления. Кроме того, хотя некоторые варианты осуществления фокусируются на межчастотных измерениях, используемых для позиционирования UE, данное изобретение равным образом применимо к другому типу измерений и не ограничено позиционированием.
Для обеспечения некоторого контекста для более подробного обсуждения межчастотных измерений согласно этим вариантам осуществления, рассмотрим сначала систему радиосвязи, показанную на фиг. 1. Начиная с узлов сети радиодоступа и интерфейсов на фиг. 1, будет видно, что этот конкретный пример обеспечен в контексте LTE систем. Тем не менее, данное изобретение не ограничено в своей применимости LTE системами и может вместо этого использоваться в любой системе, где могут быть желательными межчастотные измерения. Поскольку, однако, пример на фиг. 1 предоставлен в терминах LTE, сетевой узел, который передает и принимает по радио интерфейсу, называется eNodeB (т.е. развитым Node B), причем несколько из этих eNodeB 200 показаны здесь.
В контексте радио интерфейса, каждый eNodeB 200 отвечает за передачу сигналов по направлению к одной или нескольким сотам 202 и прием сигналов от них. Каждый eNodeB 200 согласно этому варианту осуществления включает в себя множественные антенны, например, 2, 4 или более передающих антенн, а также потенциально множественные приемные антенны, например, 2, 4 или более приемных антенн, и управляет функциями, включающими в себя, но не ограниченными этим, кодирование, декодирование, модуляцию, демодуляцию, перемежение, обращение перемежения и т.д. по отношению к физическому уровню таких сигналов. eNodeB может также включать в себя один передатчик и один приемник. Отметим, что, как используется здесь, фраза «передающие антенны» конкретно означает включение и обобщение физических антенн, виртуальных антенн и антенных портов. eNodeB 200 также отвечает за многие более высокие функции, связанные с управлением коммуникациями в этой системе, включающие в себя, например, планирование пользователей, решения о передаче обслуживания и т.п. Заинтересованный читатель, который желает получить больше информации, касающейся функций передачи или приема, связанных с LTE или другими системами, в которых эти варианты осуществления могут быть развернуты, направляется к книге с названием «3G Evolution - HSPA and LTE for Mobile Broadband», Eric Dahlman и др., опубликованной Elsevier Ltd., 2007 г., описание которой включено сюда посредством ссылки.
Согласно вариантам осуществления, UE 204, которое работает в соте 202А, как показано на фиг. 1, может выполнять межчастотные измерения на различных сигналах, передаваемых различными eNodeB, показанными на фиг. 1, как будет описано ниже. Аналогично, eNodeB 200 будет передавать сигналы, которые будут подвергаться такому межчастотному измерению.
Различные типы сетевой синхронизации и выравнивания подкадров позиционирования могут иметь различное влияние на возможность межчастотных измерений. С точки зрения синхронизации во времени, сети могут быть классифицированы следующим образом (1) полностью синхронизированные сети, например, синхронизированные на уровне кадров, как показано на фиг. 2(а), (2) асинхронные сети с известным смещением, например, синхронизированные по подкадрам, как показано на фиг. 2(b), (3) асинхронные сети с частичным выравниванием, например, где максимальная временная разница между двумя подкадрами в различных сотах находится в пределах половины подкадра, как показано на фиг. 2(с), и (4) полностью асинхронные сети, например, где соты не синхронизированы вообще и работают независимо, как показано на фиг. 2(d). Также может быть предусмотрена система с различной комбинацией 2(а)-2(d).
Когда система является полностью синхронизированной сетью, подкадры некоторого сигнала, переданного через первую соту (210), начинаются в тот же момент во времени, что и соответствующие подкадры некоторого сигнала, переданного через вторую соту (220), как показано на фиг. 2(а).
Когда система является асинхронной сетью с известным смещением, подкадры сигнала, переданного через вторую соту (230), имеют то же смещение во времени (Δ) относительно соответствующих подкадров сигнала, переданного через первую соту (210), как показано на фиг. 2(b).
Когда система является асинхронной сетью с частичным выравниванием, подкадры сигналов, переданных через различные вторые соты (240), имеют различные смещения во времени (Δ) относительно соответствующих подкадров сигнала, переданного через первую соту (210), как показано на фиг. 2(с). Однако, эти различные смещения находятся в пределах половины подкадра (например, если подкадр длится 1 мс, Δi∈[-0,5, 0,5] мс, где i=1, 2, …).
Когда система является полностью асинхронной сетью, нельзя полагаться на соответствие между началом подкадра сигнала, переданного через первую соту (210), и началом соответствующего подкадра сигнала, переданного через вторую соту (250), как показано на фиг. 2(d).
Временное смещение между любыми двумя сотами может быть записано в общей форме как Δ+ε, где Δ - временная разница между подкадрами с одними и теми же индексами (т.е. соответствующими подкадрами) в этих двух сотах, а ε - ошибка синхронизации (синхронизатора), которая зависит от используемого способа синхронизации (например, GPS синхронизатор и т.д.). В LTE TDD, которая обычно является синхронной системой, ошибка синхронизации между любыми двумя сотами с диапазоном соты вплоть до 3 км в сети ограничена 3 µс. Вне 3 км диапазона соты максимальной допускаемой ошибкой является 10 µс. Следует отметить, что эти соты могут принадлежать различным eNode Bs 200. Для сот, расположенных в одном и том же eNodeB 200, ошибка синхронизации между ними может быть значительно более низкой, чем стандартизированное требование.
В синхронизированной сети, соты синхронизированы в каждой частоте, но также среди частот, хотя ошибка межчастотной синхронизации является большей, чем ошибка внутричастотной синхронизации. Например, во внутриполосной непрерывной UTRAN FDD со многими несущими, любые две смежные компонентные несущие в пределах одного и того же Node B могут быть синхронизированы в пределах ±65 нс. В межполосной не непрерывной системе UTRAN FDD со многими несущими, любые две компонентные несущие, принадлежащие к различным частотным диапазонам в пределах одного и того же Node B, могут находиться в диапазоне между ±325 нс и ±525 нс. Подобный уровень требований синхронизации ожидается для LTE систем со многими несущими, определяемыми в настоящее время.
Смещение Δ в асинхронных сетях с известным смещением обычно определяется посредством планирования, например, нацеленного на уменьшение помех на физических сигналах (например, сигналах синхронизации) или каналах управления. С точки зрения позиционирования, этот тип сети может рассматриваться как синхронная сеть, так как показатель конфигурации позиционирования может быть выполнен различным образом в различных сотах для оценивания Δ и выравнивания подкадров позиционирования среди этих сот.
Таким образом, следующие предположения выравнивания могут быть сделаны согласно вариантам осуществления для четырех типов сетей:
Выровненный (А): Для полностью синхронизированных сетей и асинхронных сетей с известным Δ, подсчитанным в полных подкадрах, разумно предположить, что подкадры позиционирования являются выровненными по времени во всех сотах;
Выровненный по половине подкадра (1/2 A): Для асинхронных сетей со способностью выравнивания подкадров в пределах половины подкадра, можно предположить, что максимальная абсолютная разница временного согласования между подкадрами позиционирования в двух сотах составляет 0,5 подкадра, что является текущим базовым 3GPP предположением для подкадров позиционирования в асинхронных сетях;
Невыровненный (NA): В полностью асинхронных сетях, максимальная разница временного согласования между двумя подкадрами составляет 10 мс (длина радиокадра), и по существу не может быть сделано никакого предположения о выравнивании подкадров позиционирования.
Кроме того, важно не только выравнивание в пределах каждой частоты, но также возможность выравнивания среди частот. Предположим, что те же самые категории выравнивания применяются к межчастотным выравниваниям, что определяет, как любая сота, работающая на частоте f1, выровнена с любой сотой, работающей на частоте f2. Предположим также, что та же самая категория выравнивания применяется для всех сот, работающих на одной и той же частоте. С этими предположениями, фиг. 3(а)-3(с) суммируют категории выравнивания всей системы, зависящие от комбинаций внутричастотного и межчастотного выравнивания для частот f1 и f2. Фиг. 3(а) соответствует (Таблица 301). Фиг. 3(b) соответствует межчастотному выравниванию по половине подкадра (Таблица 302). Фиг. 3(с) соответствует случаям отсутствия межчастотного выравнивания (Таблица 303). Например, система может быть выровнена, только когда f1 выровнена, f2 выровнена, и f1 и f2 являются межчастотно выровнены, как указано посредством фиг. 3(а). Однако, независимо от внутричастотного выравнивания, система всегда является невыровненной, когда f1 и f2 не выровнены между собой, как указано посредством фиг. 3(с). Другим примером является то, что не может быть межчастотного выравнивания по половине подкадра, если по меньшей мере одна рабочая частота не выровнена, т.е. такие случаи являются неприменимыми (с точки зрения реализации системы) и отмечены прочерком «-», например, как показано на фиг. 3(b), и при помощи межчастотного выравнивания по половине подкадра система может быть в лучшем случае выровнена по половине подкадра, даже если каждая из этих частот выровнена.
В вышеизложенном предполагалось, что одна и та же категория выравнивания применяется для всех сот, работающих на одной и той же частоте. На практике, может случиться, что в пределах одной и той же частоты некоторые соты синхронизированы, а другие соты синхронизированы по половине подкадра или не синхронизированы вообще. В этом случае, предлагается группировать соты на основе принципа синхронизации для каждой частоты и обращаться с каждой группой отдельно по отношению к другим частотам. Классификация на фиг. 3(а)-3(с) является, следовательно, все еще применимой с тем исключением, что рассматриваются группа на f1 (вместо f1) и группа на f2 ( вместо f2), так что все способы, описанные в этих вариантах осуществления, также являются применимыми к специальному случаю, когда несколько групп с различным выравниванием присутствуют на некоторой частоте.
Отметим также, что фиг. 3(а)-3(с) классифицируют систему, которая состоит по меньшей мере из двух частот и по меньшей мере одной соты, работающей на каждой частоте. Однако, с перспективы UE, для межчастотных измерений достаточно взглянуть на классификацию комбинации каждой пары сот отдельно (опорной соты и соты, подлежащей измерению на другой частоте), при применении того же самого принципа классификации. Термин «категория выравнивания системы», как используется здесь, означает категорию выравнивания пары сот.
Затем обсуждается влияние заданной категории выравнивания системы на межчастотные измерения согласно вариантам осуществления. Для внутричастотного измерения, использование PRS для невыравненного случая является менее практичным, чем измерение RSTD на некотором другом типе сигналов, которые передаются более часто, например, CRS сигналов или PSS/SSS сигналов. Это имеет место потому, что основным выигрышем с PRS и подкадрами позиционирования являются низкие помехи, что не может быть гарантировано, когда эти соты не синхронизированы.
Тот же самый подход может быть применен согласно вариантам осуществления для межчастотных измерений для случая, когда система не выровнена, т.е. независимо от того, как межчастотные измерения проводятся в каждой из частот. А именно, если система классифицируется как «NA» согласно классификации, показанной на фиг. 3(а)-3(с), выполняются межчастотные измерения сигналов отличных от PRS сигналов. В одном варианте осуществления, такие межчастотные измерения выполняются на CRS сигналах.
Для систем, которые классифицируются как выровненные или выровненные по половине подкадра, могут также проводиться межчастотные измерения сигналов, отличных от PRS сигналов, как для невыравненного случая, но использование PRS также возможно, если выравнивание промежутков измерений и подкадров позиционирования может быть гарантировано, что является предметом дополнительного обсуждения в следующих разделах.
Для резюмирования вышеизложенного варианта осуществления, способ 400 для выполнения измерений позиционирования (например, RSTD) может включать в себя этапы, показанные в блок-схеме фиг. 4. Когда опорная сота (С1), работающая на первой частоте (f1), и соседняя сота (С2), работающая на частоте (f2), не синхронизированы (NA), выполняются измерения временной разницы опорных сигналов, отличных от PRS сигналов, например, таких как опорные сигналы соты (CRS).
Для межчастотных измерений (f1 и f2 являются различными), когда сота 1 и сота 2 выровнены или выровнены по половине подкадра, эти измерения могут выполняться либо на PRS, либо на отличных от PRS сигналах. Однако, для осуществления возможности межчастотных PRS измерений, необходимо, чтобы промежутки межчастотных измерений и подкадры позиционирования были выровнены. Категория выравнивания для рассматриваемой пары сот может быть либо определена по принципу сота за сотой, когда такая информация является доступной в системе, либо может быть выведена для данных частот из индикатора выравнивания системы, заданного согласно классификации на фиг. 3(а)-3(с).
Фиг. 5 иллюстрирует оборудование 500 пользователя согласно некоторому варианту осуществления. Это оборудование пользователя включает в себя интерфейс 510 и процессор 520.
Интерфейс 510 принимает сигналы от сетевых узлов (например, 200, на фиг. 1), принятые через различные соты (например, 202, 202А). Интерфейс 510 может также принять от сетевого узла список соседних сот, предназначенных для измерения посредством UE 500, например, для позиционирования.
Процессор 520 подключен к интерфейсу 510 и выполнен с возможностью выполнения межчастотных измерений временной разницы опорных сигналов (RSTD) у опорных сигналов.
Как объяснялось выше, когда межчастотные измерения должны быть проведены на PRS сигналах, важно гарантировать, что перекрытие между подкадрами позиционирования и эффективным временем измерения в пределах промежутков измерений для конкретного UE является достаточным для достижения требуемого качества измерения и точности позиционирования для этого UE. Это условие далее называется здесь «условием достаточного времени измерения», причем это условие более подробно описано ниже. В этом контексте, необходимо рассмотреть два случая: (1) случай, когда промежутки межчастотных измерений уже были сконфигурированы и использованы посредством UE перед тем, как начался сеанс позиционирования, и (2) случай, когда промежутки межчастотных измерений до сих пор не рассматривались для UE, которое должно быть позиционировано.
Для первого случая, узлу позиционирования необходимо проверить, сохраняется ли условие достаточного времени измерения с текущей конфигурацией промежутков измерений. Если это необходимо, и если это возможно, промежутки измерений могут быть повторно сконфигурированы и смещены во времени для соответствия во времени желаемым временным слотам на другой частоте. Один из таких подходов, описанный ниже для запуска конфигурации промежутков, мог бы быть также приспособлен для повторной конфигурации промежутков.
Для второго случая, один вариант осуществления запускает конфигурацию и активацию промежутков межчастотных измерений для целевого UE таким образом, что достаточное время измерения сохраняется. Этот запуск мог бы быть инициирован узлом позиционирования (например, eSMLC в LTE), например, следующими неограничивающими способами. Например, запуск конфигурации/активации промежутков межчастотных измерений может быть выполнен посредством включения в список соседей соты позиционирования, который сигнализируется по LPP (LTE протоколу позиционирования) или любому другому протоколу радиоинтерфейса, такому как RRC (управление радиоресурсами) некоторой соты, работающей на другой частоте (с частотой, указанной в данных поддержки), на основе которой UE сам конфигурирует эти промежутки с использованием информации поддержки, например, оцениваемого RSTD и неопределенности, принятой от сети (влияние реализации UE). Альтернативно, запуск конфигурации/активации промежутков межчастотных измерений может быть выполнен посредством инструктирования обслуживающей BS сконфигурировать промежутки межчастотных измерений для данного UE и активировать их в определенное время.
Таким образом, для резюмирования, вышеизложенные варианты осуществления описывают, среди прочего, запуск конфигурации и активации промежутков межчастотных измерений посредством узла позиционирования для данного UE, где этот запуск является, например, включением в список соседних сот позиционирования (сигнализируемый по LPP) некоторой соты на другой частоте, чем частота обслуживающей соты, или командой для обслуживающей BS. Кроме того, вышеизложенные варианты осуществления описывают запуск повторной конфигурации и смещение во времени уже сконфигурированных промежутков измерений.
Списки соседних сот позиционирования генерируются в сетевом узле 200, который может быть, например, eNodeB или узлом позиционирования E-SMLC 205 на фиг. 1. Архитектура позиционирования UE, применимая к E-UTRAN, показана на фиг. 5-1 3GPP TS 36.305 v9.2.0 (2010-03), которая включена сюда посредством ссылки.
Как упоминалось выше, значимым критерием, связанным с межчастотными измерениями и конфигурированием промежутков межчастотных измерений согласно некоторым вариантам осуществления, является достаточное время измерения. Фиг. 6 иллюстрирует пример перекрытия во времени промежутка (550) измерения с подкадрами (560) позиционирования в соседней соте, работающей на частоте f2, где межчастотное время переключения UE соответствует областям с нанесенными полосами в этом промежутке измерения. Это время измерения является достаточным, когда может быть достигнуто необходимое качество измерения и точность позиционирования. Необходимое время является компромиссным решением между PRS полосой частот передачи и числом последовательных подкадров позиционирования. Например, для удовлетворения FCC требованиям, малая полоса частот (т.е. 1,4 МГц) обычно требует вплоть до 6 последовательных подкадров позиционирования (см. также 3GPP 36.133). Кроме того, может требоваться более одного случая позиционирования, особенно для асинхронных сетей. Однако не все приложения требуют точности позиционирования, определенной FCC. Итак, достаточное время измерения будет задано посредством сети на основе запрошенной точности позиционирования, конфигурации позиционирования в соте, подлежащей измерению, и оцененного качества сигналов. Также, может дополнительно использоваться некоторая статистика измерений и информации об истории измерений.
Теперь предположим, что достаточное время измерения является известным для данной ситуации. Из фиг. 6, можно видеть, что эффективное PRS измерение максимизируется, когда начало первого подкадра позиционирования выровнено с началом интервала, когда период переключения (прямоугольник с полосами) завершен, и UE может начать измерение на f2. Однако важно отметить, что точное планирование промежутка измерения во времени было бы возможным, только если UE было бы способно синхронизироваться с измеряемой сотой. Это может быть возможным, например, когда UE уже выполнял межчастотные измерения на этой соте, что упрощает выравнивание (повторную конфигурацию) промежутков измерений и подкадров позиционирования. В контексте позиционирования, однако, такое предположение не может быть сделано, так как соты, которые является гораздо более слабыми, чем опорная сота, часто необходимо измерять, что обычно не случилось бы в случае межчастотных измерений, не предназначенных для позиционирования. Следовательно, сеть становится ответственной за правильное размещения промежутка измерения во времени для выравнивания с подкадрами позиционирования на частоте f2.
Основные факторы, влияющие на возможное рассогласование между временем, когда начинается период эффективного измерения, и началом первых подкадров позиционирования, включают в себя время переключения UE, задержку распространения и смещение рассогласования кадров (асинхронные сети). В синхронизированной сети, SFN выровнен среди сот, но также среди различных частот, и вклад ошибки синхронизации является относительно малым по сравнению с другими рассматриваемыми задержками и может, следовательно, игнорироваться ввиду межчастотных измерений. С другой стороны, если ошибка (ε) синхронизации является большой, такой как в сети с большими сотами, то она может также рассматриваться в определении достаточного времени для измерения позиционирования в этом промежутке.
Игнорируя для простоты вклад, обусловленный ошибкой синхронизации, промежуток измерения, согласно одному варианту осуществления, начнется в момент:
где 

Согласно одному варианту осуществления, время переключения UE на частоту f2 в среднем не будет превышать 0,5 мс в некотором промежутке измерения. Максимальная задержка распространения для сот, включенных в согласованные данные поддержки, гораздо ниже 1 мс, а максимальное рассогласование подкадров для подкадров позиционирования составляет 0,5 мс. Грубо оцененная сумма вышеупомянутых задержек делает разумным предположение наличия четырех полных подкадров, доступных для межчастотных измерений позиционирования, в качестве критерия для включения некоторой соты в список соседей позиционирования. Отметим, что опорной сотой может быть обслуживающая сота.
Решение одной из проблем, идентифицированных в разделе «Уровень техники», т.е. что промежутки измерений могут случаться более часто, чем случаи позиционирования, когда должно быть измерено более одной частоты, отличной от обслуживающей частоты, организация промежутков измерений таким образом, что они захватывают более одной частоты для межчастотных измерений (другая частота в другом промежутке), сделало бы межчастотные измерения позиционирования более эффективными и более быстрыми. В одном варианте осуществления, подкадры позиционирования при различных частотах сдвинуты по времени на 80 мс (половина минимальной PRS периодичности, которая равна 160 мс), что может быть реализовано, например, в синхронизированных сетях или сетях с совместно расположенными многочастотными сотами. Для асинхронных FDD сетей, когда многочастотные соты не являются совместно расположенными, может требоваться некоторая сигнализация для гарантирования желаемой многочастотной конфигурации позиционирования для оптимизации межчастотных измерений позиционирования. Альтернативное межчастотное решение состоит в измерении на PRS на частотах, где подкадры позиционирования достаточно перекрываются с промежутками измерений, и в измерении на других доступных сигналах (например, CRS) в других частотах во время доступных промежутков межчастотных измерений.
Таким образом, для резюмирования вышеизложенного обсуждения, варианты осуществления дают возможность осуществлять измерения на f2, сдвиг относительно опорной соты, подлежащий применению для планирования промежутков межчастотных измерений, составляет 

В вышеописанных вариантах осуществления, обсуждались способы, касающиеся того, как достигнуть желаемого выравнивания между промежутками измерений и подкадрами позиционирования. Однако такое выравнивание не всегда возможно. Информация о временном выравнивании рассматривается в дополнение к другой информации при сборке данных поддержки, сигнализируемых к UE (например, OTDOA список соседних сот или ECID для облегчения межчастотных измерений качества PRS сигналов). Такая другая информация может включать в себя информацию о конфигурации позиционирования (например, PRS полоса частот передачи, тип среды и PRS периодичность), требования точности позиционирования UE и т.д. Соты, для которых может быть удовлетворено достаточное время измерения, включаются в список соседних сот для межчастотных измерений.
Фиг. 7 является блок-схемой способа 700, позволяющего осуществить межчастотные измерения разницы опорных сигналов. Способ 700 включает в себя генерацию (в S710), посредством сетевого узла для оборудования пользователя, списка межчастотных соседей из соседних сот, предназначенных для измерения. Этим соседним узлом может быть eNodeB или узел позиционирования. Каждая соседняя сота (202), чья информация включена в список межчастотных соседей, удовлетворяет условию выравнивания и достаточному времени измерения. Согласно условию выравнивания, подкадры первого сигнала, имеющего первую частоту, переданного через опорную соту, связанную с оборудованием пользователя, являются по меньшей мере одним из (а) синхронизированных с, (b) имеют известное смещение относительно или (с) имеют случайное смещение, меньшее чем одна вторая подкадра относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через каждую одну из соседних сот. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале. Этот способ также включает в себя передачу (в S720) списка межчастотных соседей к оборудованию пользователя.
Как описано, варианты осуществления включают в себя как оборудование пользователя (UE), так и компоненты стороны сети, например, базовые станции или eNodeB. UE 204 и eNodeB 200 фиг. 1 могут быть, например, реализованы с использованием различных компонентов, как аппаратных, так и программных. Например, как показано, в общем, на фиг. 8, такое UE или eNodeB 600 может включать в себя процессор 602 (или множественные ядра процессора), запоминающее устройство 604, одно или несколько дополнительных устройств 606 хранения данных (например, внешнее устройство (устройства) хранения данных), операционную систему 608, выполняемую на процессоре 602 и использующую запоминающее устройство 604, а также соответствующее приложение 610, например, приложение, которое управляет выравниванием синхронизации способом, описанным выше. Интерфейсный блок 612 может быть обеспечен для облегчения коммуникаций между узлом 600 и остальной частью сети или может быть интегрирован в процессор 602. Например, интерфейсный блок 612 может включать в себя приемо-передатчик, способный осуществлять связь беспроводным способом по радио интерфейсу, например, как определено посредством LTE, включая аппаратное и программное обеспечение, способное выполнять необходимую модуляцию, кодирование, фильтрацию и т.п., а также демодуляцию и декодирование для обработки таких сигналов, включая команды или данные межчастотных измерений, описанные выше.
Когда соты, работающие на различных частотах являются совместно расположенными (т.е. расположенными в одном и том же месте и в некоторых случаях также в одной и той же базовой станции), такая информация, как оцененная RSTD или окно поиска в идеале, возможно, является очень похожей для сот, работающих на этих частотах (см. фиг. 9, где совместно расположенные соты при помощи информации поддержки, полученной на одной частоте, могут быть также повторно использованы на другой частоте). Причиной является то, что совместно расположенные соты даже в асинхронной сети являются выровненными по времени с тем же самым местом или базовой станцией. Однако, из-за многих факторов, например, различной мощности передачи, различных помех и уровней качества сигналов, данные поддержки могут быть более точно заданы на одной из частот, чем на других. Это предлагает то, что наиболее точная информация поддержки из одного множества частот может использоваться для другого множества частот в совместно расположенных сотах.
Когда соты, работающие на различных частотах f1 и f2, являются совместно расположенными, варианты осуществления используют наиболее точную информацию поддержки, доступную от двух частот для сборки данных поддержки. Этот выбор может быть осуществлен сетью в узле позиционирования для решения, какие данные поддержки следует передать, но этот выбор мог бы быть также осуществлен посредством UE, если оно приняло информацию поддержки для сот на различных частотах, и оно имеет информацию о расположении антенн, т.е. может выяснить, какие соты являются совместно расположенными.
В качестве примера предположим, что f1 является внутричастотой, а f2 является межчастотой, и что соты на f1 и f2 являются совместно расположенными. Тогда измерение оцениваемой RSTD между сотами С11 и С12, выполняемое на f1, может использоваться для определения задержки (D1) распространения между UE и сотой С21 и задержки (D2) распространения между UE 800 и сотой С22. Соты С11 и С21 являются совместно расположенными в месте S1 и принадлежат к частоте f1 и f2 несущей, соответственно. Аналогично, соты С21 и С22 являются совместно расположенными в месте S2 и принадлежат к частоте f1 и f2 несущей, соответственно. Оцениваемые задержки D1 и D2 распространения в дополнение к другим факторам (например, рассогласованию между сотами, как обсуждалось выше) могут использоваться в определении достаточного времени для измерения соты С21 и С22 для осуществления измерения позиционирования (т.е. RSTD с опорной сотой) в промежутки. Используя эту информацию, сеть может также решить, включать ли соту в список соседних сот для измерения позиционирования или нет.
Фиг. 10 является блок-схемой способа 900 выполнения межчастотных измерений временной разницы опорных сигналов посредством оборудования пользователя (например, 204 на фиг. 1) согласно некоторому варианту осуществления. Этот способ включает в себя прием (в S910) первого сигнала, имеющего первую частоту, через опорную соту (например, 202А на фиг. 1), связанную с оборудованием пользователя, и второго сигнала, имеющего вторую частоту, принятого через соседнюю соту (202), включенную в список межчастотных соседей. Отметим, что опорная сота может быть или может не быть обслуживающей сотой. Этот способ дополнительно включает в себя выполнение (в S920) первых межчастотных измерений временной разницы опорных сигналов у опорных сигналов положения соседней соты во время первых промежутков измерений, которые перекрываются с подкадрами позиционирования второго сигнала. Соседняя сота включается в список межчастотных соседей, если она удовлетворяет условию выравнивания и достаточному времени измерения.
Согласно условию выравнивания, подкадры первого сигнала, имеющего первую частоту, переданного через опорную соту, связанную с оборудованием пользователя, являются по меньшей мере одним из (а) синхронизированных с, (b) имеют известное смещение относительно или (с) имеют случайное смещение, меньшее, чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через каждую одну из соседних сот. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале. Промежутки измерений случаются более часто, чем опорные сигналы положения.
Способ 900 дополнительно включает в себя (в S930) выполнение вторых межчастотных измерений временной разницы опорных сигналов у опорных сигналов, отличных от опорных сигналов положения, во время вторых промежутков измерений, которые не перекрываются с подкадрами позиционирования во втором сигнале.
Варианты осуществления описаны выше для измерений позиционирования. Однако данное изобретение не ограничено в своей применимости измерениями позиционирования, а может вместо этого применяться ко всем типам измерений соседних сот, которые осуществляются посредством UE над сигналами (например, пилот-сигналами или опорными сигналами), которые являются относительно разреженными, т.е. которые посылаются сетью) с периодичностью, более длительной, чем периодичность периода промежутка измерения. Варианты осуществления могут также применяться, например, когда некоторые конкретные временные слоты представляют интерес для некоторых измерений, и эти временные слоты редко расположены во времени или по меньшей мере являются менее частыми, чем период промежутка измерения. Например, варианты осуществления применяются к другим типам измерений для сетевого планирования или для самоорганизующихся сетей.
Варианты осуществления имеют, среди прочих, по меньшей мере следующие преимущества, включающие в себя возможность осуществления межчастотных измерений позиционирования, возможность осуществления межчастотных измерений сигналов, редко передаваемых во времени или во время конкретных подкадров, редко расположенных во времени, и улучшенное качество и надежность данных поддержки, передаваемых сетью, а также избегание ненужных издержек сигнализации позиционирования посредством исключения тех сот, для которых не могут ожидаться межчастотные измерения достаточного качества.
Согласно одному варианту осуществления, способ в узле позиционирования или BS гарантирует, что конкретные измерения в конкретных временных слотах могут быть проведены в сконфигурированных промежутках измерений, где либо передаваемые сигналы, на которых эти измерения должны быть выполнены, либо временные кванты появляются редко во времени или по меньшей мере менее часто, чем период промежутка измерения. Варианты осуществления применимы к позиционированию как плоскости пользователя, так и плоскости управления.
Согласно другому варианту осуществления, способ включает в себя использование информации о временном выравнивании при сборке данных поддержки, сигнализируемых к UE, где информация может также совместно рассматриваться вместе с информацией о конфигурации позиционирования (например, PRS полосе частот передачи, типе среды и PRS периодичности), требованиями точности позиционирования UE и т.д. Согласно другому варианту осуществления, задействуется возникающий из-за позиционирования запуск конфигурации/реконфигурации промежутков межчастотных измерений. Кроме того, варианты осуществления не ограничены измерениями временного согласования, PRS или позиционированием в общем, но также применимы, в общем, для межчастотных измерений сигналов, редко передаваемых во времени, т.е. специальный тип сигналов (например, PRS), которые могут передаваться более часто, но передаваться вместо этого согласно более разреженному образцу во времени, например, по причинам экономии энергии или координации помех, и/или во время подкадров с низкими помехами, редко расположенными во времени (например, подкадров позиционирования, MBSFN подкадров и т.д.), оцениваемая RSTD и неопределенность используются для планирования промежутков межчастотных измерений.
На основе вышеизложенного, будет ясно, что варианты осуществления гарантируют, что подкадры позиционирования являются выровненными в пределах подкадра как в синхронных, так и в асинхронных сетях, для внутричастотных и межчастотных измерений. Кроме того, для тех измерений, которые используют PRS сигналы, например, на частоте f2, максимальное эффективное время PRS измерения в пределах одного случая позиционирования составляет 4 полных подкадра согласно некоторому варианту осуществления. Эти особенности дают возможность некоторым вариантам осуществления осуществлять межчастотные измерения без дополнительной сигнализации.
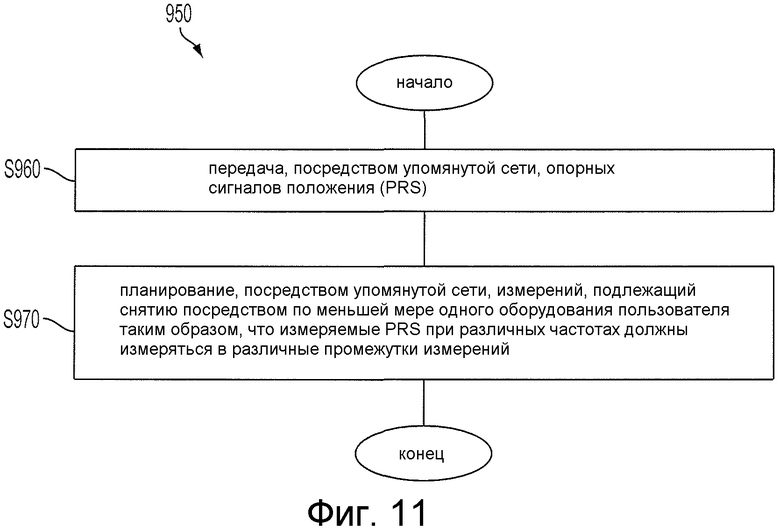
Согласно другому варианту осуществления, показанному на фиг. 11, способ для выполнения измерений в сети 950 радиосвязи включает в себя передачу, посредством упомянутой сети, опорных сигналов позиционирования (PRS) в S960. Далее, этот способ включает в себя планирование, посредством упомянутой сети, измерений, подлежащих снятию посредством по меньшей мере одного оборудования пользователя таким образом, что измеряемые PRS при различных частотах должны измеряться в различных промежутках измерений, в S970.
Вышеприведенное описание примерных вариантов осуществления обеспечивает иллюстрацию и описание, но не предназначено быть исчерпывающим или ограничивать изобретение точной описанной формой. Модификации и вариации возможны в свете вышеуказанных идей или могут быть получены при практической реализации изобретения.

Изобретение относится к системам связи. Технический результат заключается в усовершенствовании процедуры измерения позиционирования. Сетевой узел генерирует список межчастотных соседей из соседних сот, предназначенных для измерения, включающий в себя соседние соты, удовлетворяющие условию выравнивания и достаточному времени измерения. Это условие выравнивания удовлетворяется, когда подкадры первого сигнала, имеющего первую частоту, передаваемые через опорную соту, связанную с оборудованием пользователя, синхронизированы с, имеют известное смещение относительно или имеют случайное смещение меньшее, чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала, имеющего вторую частоту, переданного через соседние соты. Достаточное время измерения определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале. Это оборудование пользователя выполняет межчастотные измерения временной разницы опорных сигналов (RSTD) во время промежутков измерений. 7 н. и 29 з.п. ф-лы, 16 ил., 1 табл.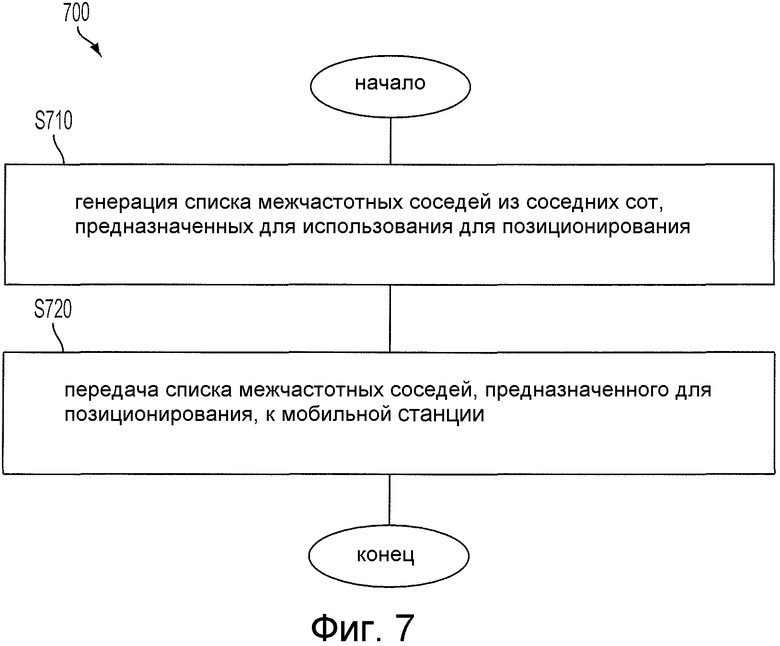
1. Способ (700) осуществления возможности межчастотных измерений временной разницы опорных сигналов (RSTD) у опорных сигналов, содержащий этапы на которых:
генерируют (S710), посредством сетевого узла (200) для сетевого устройства (204), список межчастотных соседей из соседних сот, предназначенных для измерения, причем каждая соседняя сота (202), чья информация включается в список межчастотных соседей, удовлетворяет условию выравнивания, согласно которому подкадры первого сигнала (210), имеющего первую частоту, переданного через опорную соту (202А), являются по меньшей мере одним из (а) синхронизированных с, (b) имеющих известное смещение относительно, или (с) имеющих случайное смещение, меньшее чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала (220, 230, 240), имеющего вторую частоту, переданного через каждую соседнюю соту (202), и
достаточному времени измерения, которое определяется посредством перекрытия промежутков измерений (550) и подкадров (560) позиционирования во втором сигнале; и
передают (S720) список межчастотных соседей к оборудованию пользователя.
2. Способ по п. 1, в котором первая частота отличается от частоты обслуживающей соты.
3. Способ по п. 2, в котором первая частота является той же самой, что и вторая частота.
4. Способ по п. 1, в котором сетевой узел является одним из eNodeB и E-SMLC.
5. Способ по п. 1, дополнительно содержащий:
конфигурирование, посредством сетевого узла, промежутков измерений для удовлетворения упомянутому достаточному времени измерения для соседней соты, для которой удовлетворяется условие выравнивания.
6. Способ по п. 5, в котором сетевой узел выполняет конфигурирование промежутков измерений после детектирования новой соседней соты, для которой удовлетворяется условие выравнивания, или после приема некоторой команды.
7. Способ по п. 1, в котором достаточное время измерения не может превышать 5 подкадров позиционирования второго сигнала, перекрывающихся с соответствующим промежутком измерения.
8. Способ по п. 1, дополнительно содержащий:
конфигурирование, посредством сетевого узла, промежутков измерений для захвата подкадров позиционирования отличных вторых сигналов, принятых через отличные соседние соты, в отличные промежутки измерений.
9. Способ по п. 5, в котором сетевой узел конфигурирует промежутки измерений, чтобы они имели место при временном сдвиге относительно оцениваемого времени начала первого подкадра позиционирования во втором сигнале относительно опорной соты, посредством вычитания времени переключения, необходимого для переключения оборудования пользователя с первой частоты на вторую частоту, и посредством добавления неопределенности во временное согласование, когда оцениваемое время является большим чем нуль, или вычитания этой неопределенности, когда оцениваемое время является меньшим чем нуль.
10. Способ по п. 1, дополнительно содержащий:
реконфигурирование, посредством сетевого узла, промежутков измерений для удовлетворения достаточному времени измерения для соседней соты, которая удовлетворяет условию выравнивания, если эти промежутки измерений были сконфигурированы перед упомянутой генерацией, и упомянутое достаточное время измерения не удовлетворяется для этой соседней соты.
11. Способ по п. 1, в котором упомянутое достаточное время измерения определяется на основе (а) запрошенной точности положения, которую необходимо достичь, (b) оцениваемого качества сигналов, (с) полосы частот опорных сигналов положения, (d) периодичности случаев опорных сигналов положения, или (е) числа последовательных подкадров нисходящей линии связи в случае опорных сигналов положения.
12. Способ по п. 1, в котором сетевой узел выбирает одну соту среди двух или нескольких соседних сот, имеющих одно и то же местоположение и отличные вторые частоты, на основе информации об этих двух или нескольких соседних сотах, которая указывает, что второй сигнал, принятый оборудованием пользователя через эту одну соту, имеет лучшее качество сигнала, чем качество сигнала вторых сигналов, принятых через эти две или несколько соседних сот, и включает в себя только эту одну соту среди этих двух или нескольких соседних сот, имеющих одно и то же местоположение в списке межчастотных соседей.
13. Сетевой узел (200, 600), содержащий:
интерфейс (612), выполненный с возможностью осуществлять связь с оборудованием (204) пользователя через соты (202, 202А);
процессор (602), подключенный к этому интерфейсу и выполненный с возможностью управления этим интерфейсом для передачи по направлению к оборудованию пользователя через опорную соту (202А) списка межчастотных соседей, который включает в себя информацию о соседних сотах, причем каждая сота из упомянутых соседних сот в упомянутом списке удовлетворяет
условию выравнивания, согласно которому подкадры первого сигнала (210), имеющего первую частоту, переданного через опорную соту, связанную с оборудованием пользователя, являются по меньшей мере одним из (а) синхронизированных с, (b) имеющих известное смещение относительно, или (с) имеющих случайное смещение, меньшее чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала (220, 230, 240), имеющего вторую частоту, переданного через каждую одну из соседних сот, и
достаточному времени измерения, которое определяется посредством перекрытия промежутков измерений и подкадров позиционирования во втором сигнале.
14. Сетевой узел по п. 13, в котором сетевой узел является одним из eNodeB и E-SMLC.
15. Сетевой узел по п. 13, в котором процессор конфигурирует промежутки измерений для удовлетворения достаточному времени измерения для соседней соты, для которой удовлетворяется упомянутое условие выравнивания.
16. Сетевой узел по п. 15, в котором процессор конфигурирует промежутки измерений после детектирования новой соседней соты, для которой удовлетворяется упомянутое условие выравнивания.
17. Сетевой узел по п. 15, в котором процессор конфигурирует промежутки измерений после приема некоторой команды.
18. Сетевой узел по п. 15, в котором процессор конфигурирует промежутки измерений для захвата подкадров позиционирования отличных вторых сигналов, принятых через отличные соседние соты, в отличные промежутки измерений.
19. Сетевой узел по п. 15, в котором процессор конфигурирует промежутки измерений так, чтобы они имели место при временном сдвиге относительно оцениваемого времени начала первого подкадра позиционирования во втором сигнале относительно опорной соты, посредством вычитания времени переключения, необходимого для переключения оборудования пользователя с первой частоты на вторую частоту, и посредством добавления неопределенности, когда оцениваемое время является большим чем нуль, или вычитания этой неопределенности, когда оцениваемое время является меньшим чем нуль.
20. Сетевой узел по п. 13, в котором процессор реконфигурирует промежутки измерений для удовлетворения упомянутому достаточному времени измерения для соседней соты, удовлетворяющей упомянутому условию выравнивания, если эти промежутки измерений были сконфигурированы перед генерацией, и упомянутое достаточное время измерения не удовлетворяется для этой соседней соты.
21. Сетевой узел по п. 13, в котором процессор определяет перекрытие для осуществления возможности достижения заданной точности положения.
22. Сетевой узел по п. 13, в котором процессор определяет перекрытие в зависимости от положений опорной соты и соседних сот относительно оборудования пользователя.
23. Сетевой узел по п. 13, в котором процессор определяет перекрытие в зависимости от оцениваемого качества сигналов.
24. Сетевой узел по п. 13, в котором процессор выбирает одну соту среди двух или нескольких соседних сот, имеющих одно и то же местоположение и различные вторые частоты, на основе информации об этих двух или нескольких соседних сотах, которая указывает, что второй сигнал, принятый оборудованием пользователя через эту одну соту, имеет лучшее качество сигнала, чем качество сигнала вторых сигналов, переданных через эти две или несколько соседних сот, и включает в себя только эту одну соту среди этих двух или нескольких соседних сот, имеющих одно и то же местоположение в списке межчастотных соседей из соседних сот.
25. Способ (900) выполнения межчастотных измерений временной разницы опорных сигналов (RSTD) посредством оборудования (204) пользователя, содержащий этапы, на которых:
принимают (S910) первый сигнал, имеющий первую частоту, через опорную соту (202А), связанную с оборудованием пользователя, и второй сигнал, имеющий вторую частоту, принятый через соседнюю соту (202), включенную в список межчастотных соседей; и
выполняют (S920) первые межчастотные измерения временной разницы опорных сигналов у опорных сигналов положения упомянутой соседней соты во время первых промежутков измерений, которые перекрываются с подкадрами позиционирования второго сигнала,
причем эту соседнюю соту включают в список межчастотных соседей, если удовлетворяет
условию выравнивания, согласно которому подкадры первого сигнала (210) являются (а) синхронизированными с, (b) имеющими известное смещение относительно, или (с) имеющими случайное смещение, меньшее чем одна вторая подкадра относительно соответствующих подкадров второго сигнала (220, 230, 240), и
достаточному времени измерения, которое определяется посредством перекрытия первых промежутков измерений (550) с подкадрами позиционирования второго сигнала (560),
причем промежутки измерений случаются более часто, чем опорные сигналы положения.
26. Способ по п. 25, дополнительно содержащий:
выполнение вторых межчастотных измерений временной разницы опорных сигналов у опорных сигналов, отличных от опорных сигналов положения во время вторых промежутков измерений, которые не перекрываются с подкадрами позиционирования во втором сигнале.
27. Оборудование (204, 500) пользователя, содержащее: интерфейс (510), выполненный с возможностью приема первого
сигнала, имеющего первую частоту, через опорную соту (202А), и второго сигнала, имеющего вторую частоту, принятого через соседнюю соту (202), включенную в список межчастотных соседей, обеспеченный посредством сетевого узла (200); и
процессор (520), подключенный к этому интерфейсу и выполненный с возможностью выполнения первых межчастотных измерений временной разницы опорных сигналов (RSTD) у опорных сигналов положения, во время первых промежутков измерений, которые перекрываются с подкадрами позиционирования второго сигнала,
причем эта соседняя сота включена в список межчастотных соседей, если она удовлетворяет
условию выравнивания, согласно которому подкадры первого сигнала (210) являются (а) синхронизированными с, (b) имеющими известное смещение относительно, или (с) имеющими случайное смещение, меньшее чем одна вторая подкадра, относительно соответствующих подкадров второго сигнала (220, 230, 240), и
достаточному времени измерения, которое определяется посредством перекрытия первых промежутков измерений (550) с подкадрами позиционирования второго сигнала (560),
причем промежутки измерений случаются более часто, чем опорные сигналы положения.
28. Оборудование пользователя по п. 27, в котором процессор дополнительно выполнен с возможностью выполнения вторых межчастотных измерений временной разницы опорных сигналов у опорных сигналов, отличных от опорных сигналов положения, во время вторых промежутков измерений, которые не перекрываются с подкадрами позиционирования во втором сигнале.
29. Способ (400) выполнения измерений посредством оборудования (204) пользователя, которое принимает первый сигнал, имеющий первую частоту, через опорную соту (202А), и вторые сигналы, имеющие соответствующие вторые частоты, через соседние соты (202), содержащий этапы, на которых:
выполняют (S410) межчастотные измерения временной разницы опорных сигналов (RSTD) на первых опорных сигналах, которые передаются более часто, чем вторые опорные сигналы, во время промежутков измерений, когда подкадры первого сигнала (210) и соответствующие подкадры второго сигнала (250) не синхронизированы.
30. Способ по п. 29, в котором межчастотные RSTD измерения используются для определения положения оборудования пользователя.
31. Способ по п. 29, в котором первые опорные сигналы являются опорными сигналами соты (CRS), а вторые опорные сигналы являются опорными сигналами положения.
32. Способ по п. 29, в котором первая частота равна второй частоте.
33. Оборудование (204, 500) пользователя, содержащее: интерфейс (510), выполненный с возможностью приема первого
сигнала, имеющего первую частоту, через опорную соту (202А), и вторых сигналов, имеющих соответствующие вторые частоты, через соседние соты (202);
процессор (520), подключенный к этому интерфейсу и выполненный с возможностью выполнения межчастотных измерений временной разницы опорных сигналов (RSTD) на первых сигналах, которые передаются более часто, чем вторые опорные сигналы, когда подкадры в первом сигнале (210) и соответствующие подкадры второго сигнала (250) не синхронизированы.
34. Оборудование пользователя по п. 33, в котором межчастотные RSTD измерения используются для определения положения оборудования пользователя.
35. Оборудование пользователя по п. 33, в котором первые опорные сигналы являются опорными сигналами соты (CRS), а вторые опорные сигналы являются опорными сигналами положения.
36. Способ для выполнения измерений в сети радиосвязи, содержащий этапы, на которых:
передают, посредством упомянутой сети, опорные сигналы положения (PRS); и
планируют, посредством упомянутой сети, измерения, которые должны быть предприняты посредством по меньшей мере одного оборудования пользователя таким образом, чтобы измеряемые PRS при различных частотах измерялись в различные промежутки измерений.
| US 7133382 B2, 07.11.2006 | |||
| УСТРОЙСТВО ДЛЯ ОТБОРА ПРОБ ГАЗОВ ВЫСОКОГО ДАВЛЕНИЯ | 1998 |
|
RU2152017C1 |
| WO 2009038359 А3, 26.03.2009 | |||
| US 20090274086 А1, 05.11.2009 | |||
| US 6810019 B2, 26.10.2004 | |||
| СПОСОБ И СИСТЕМА ДЛЯ ВЫПОЛНЕНИЯ ПЕРЕДАЧИ ОБСЛУЖИВАНИЯ, ТАКОЙ, КАК ЖЕСТКАЯ ПЕРЕДАЧА ОБСЛУЖИВАНИЯ, В СИСТЕМЕ РАДИОСВЯЗИ | 2000 |
|
RU2261536C2 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |

