2420-186513RU/026
ХИРУРГИЧЕСКИЙ РЕЖУЩИЙ ИНСТРУМЕНТ С ПРИВОДОМ И ЭЛЕКТРИЧЕСКИМ ИСПОЛНИТЕЛЬНЫМ УЗЛОМ УПРАВЛЕНИЯ НАПРАВЛЕНИЕМ
Авторы: Ryan J. Laurent, Brett E. Swensgard и Bret W. Smith
Предпосылки создания изобретения
Хирургические сшивающие устройства используются для одновременного выполнения продольного разреза ткани и установления рядов скоб по обеим сторонам разреза. Такие инструменты обычно имеют концевой захват, состоящий из двух совместно действующих браншей, которые, если инструмент предназначен для эндоскопического или лапароскопического применения, могут быть проведены через просвет канюли. В одной из браншей установлен картридж со скобами, содержащий по меньшей мере два расположенных по бокам ряда скоб: по одному с каждой стороны от желоба скальпеля. Другая бранша представляет собой упорную пластину с формирующими скобу углублениями, расположенными соответственно рядам скоб в картридже. В состав инструмента входит множество клиньев, которые, совершая возвратно-поступательные движения наружу, проходят через отверстия в картридже со скобами и входят в контакт с направляющими, в которых находятся скобы, так что последние выталкиваются в направлении упорной пластины. Одновременно режущий инструмент (скальпель) перемещается по бранше в дистальном направлении так, что зажатая ткань одновременно рассекается и фиксируется (например, скобами).
Пример хирургического сшивающего инструмента, применяемого в эндоскопической хирургии, описан в опубликованной заявке на патент США № 2004/0232196 A1 «Хирургические сшивающие устройства с раздельными зажимающей и сшивающей системами», который включен в настоящий документ путем ссылки. Во время работы хирург может сомкнуть бранши сшивающего аппарата на ткани, чтобы придать ей надлежащее положение перед наложением скоб. Когда хирург сочтет, что ткань захвачена надлежащим образом, он может привести в действие хирургический сшивающий аппарат, таким образом разрезая и сшивая ткань. Одновременное разрезание и сшивание тканей исключает осложнения, которые могут возникать при последовательном выполнении этих действий различными хирургическими инструментами, которые соответственно только рассекают или только сшивают ткани.
Специалистам известны режущие эндоскопические аппараты с приводом. В таких устройствах режущее и сшивающее действия инструмента выполняются с помощью электропривода. Также известно использование расположенной в рукоятке инструмента батареи для подачи энергии на привод. Один из таких хирургических инструментов с приводом описан в опубликованной заявке на патент США (№ 2007/0175952 A1 «Хирургический режущий и сшивающий инструмент с приводом с обратной связью по усилию нагрузки», полностью включенной в настоящий документ путем ссылки.
Для хирургических инструментов с приводом иногда предпочтительно, чтобы цепь управления для управления приводом не содержала интегральных схем (ИС), изготовленных из полупроводниковых материалов, поскольку стерилизация хирургического инструмента с ИС часто трудна, сложна и затратна.
КРАТКОЕ ОПИСАНИЕ ИЗОБРЕТЕНИЯ
В одном общем аспекте настоящее изобретение относится к хирургическому инструменту с приводом, имеющему узел управления, через который осуществляется управление переключателем инструмента. Переключатель может представлять собой часть цепи управления приводом или являться частью другой цепи инструмента. В различных вариантах осуществления хирургический инструмент включает: (i) рукоятку, (ii) концевой зажим, соединенный с рукояткой, (iii) электропривод, расположенный в рукоятке и подающий энергию на концевой зажим, (iv) цепь управления приводом, соединенную с приводом и управляющую его работой, (v) приводной элемент, который приводится в движением приводом, (vi) ползунок. Цепь управления приводом содержит множество переключателей, в том числе первый переключатель с движущимся (например, нажимным) исполнительным элементом (например, поршнем). Приводной элемент, когда его приводит в движение привод, вызывает движение подвижной части концевого зажима. Такой приводной элемент имеет первое плечо, которое находится в первом положении, и второе плечо, которое находится во втором положении. Ползунок имеет первую и вторую часть. Первая часть стыкуется с приводным элементом таким образом, что ползунок может двигаться в направлении движения приводного элемента, когда либо первое, либо второе плечо приводного элемента входит в контакт с первой частью ползунка. Вторая часть ползунка приводит в действие подвижный исполнительный элемент первого переключателя в тот момент, когда приводной элемент перемещает ползунок в первое положение относительно первого переключателя. В различных вариантах осуществления переключатели цепи управления не являются частью интегральной схемы (ИС). Таким образом, в различных вариантах осуществления цепь управления приводом не содержит интегральной схемы. В различных вариантах осуществления первый переключатель управляет направлением вращения привода.
В различных вариантах осуществления приводной элемент может в результате действия привода перемещаться в продольном направлении или вращаться. Например, в одном варианте осуществления приводной элемент включает движущуюся в продольном направлении рейку, которая с одной стороны имеет зубчатое сцепление с шестерней, вращаемой приводом, а с другой стороны образует желоб, который имеет первое и второе плечо. Первая часть ползунка, которая стыкуется с приводным элементом, может иметь один или несколько язычков, выступающих внутрь желоба. Вторая часть ползунка, которая приводит в действие переключатель, может иметь консольный рычаг.
ЧЕРТЕЖИ
В настоящем документе приведено описание различных вариантов осуществления настоящего изобретения на примерах, иллюстрируемых следующими фигурами.
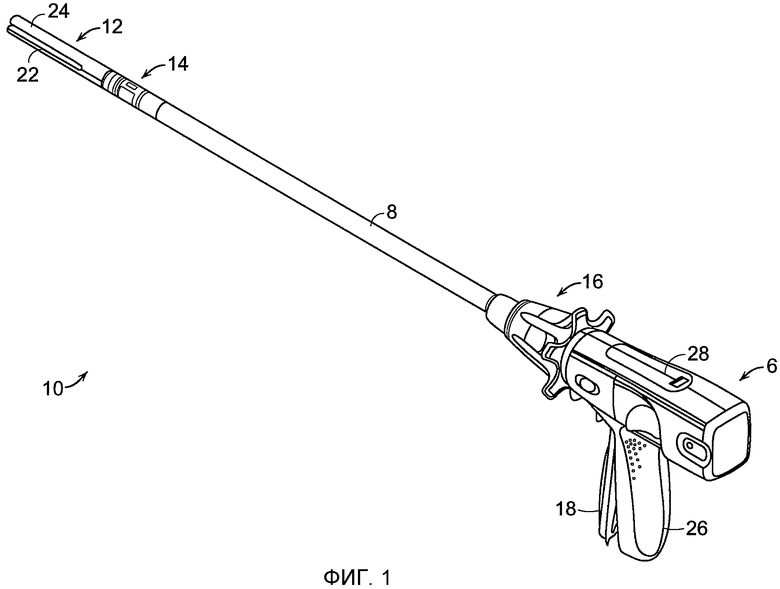
На фиг. 1 представлен перспективный вид хирургического инструмента 10, соответствующего различным вариантам осуществления настоящего изобретения, на котором показаны рукоятка, вал и концевой зажим.
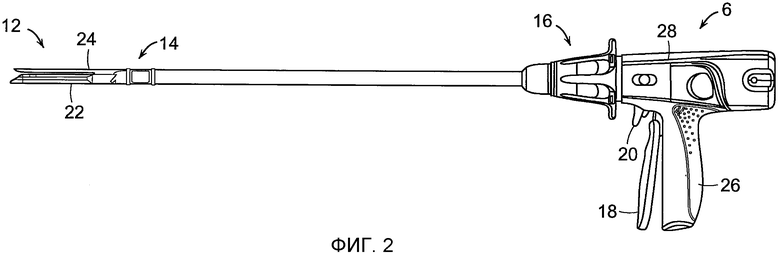
На фиг. 2 представлен вид сбоку хирургического инструмента 10 в соответствии с различными вариантами осуществления настоящего изобретения, на котором показаны рукоятка, вал и концевой зажим.
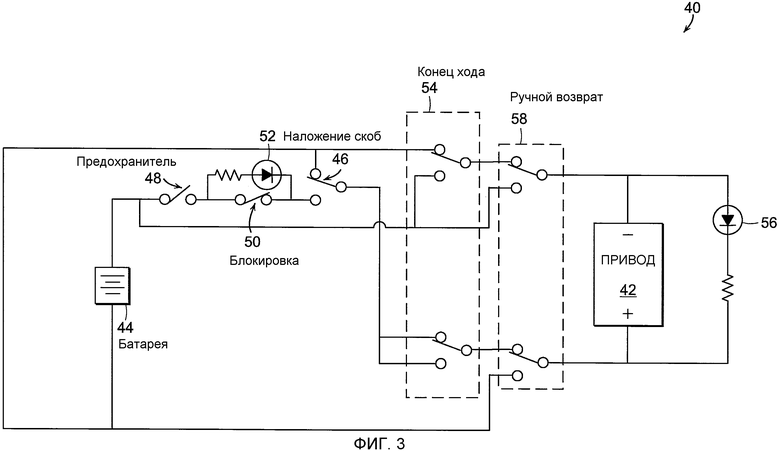
На фиг. 3 представлена схема цепи управления приводом, управляющая приводом хирургического инструмента в соответствии с различными вариантами осуществления изобретения.
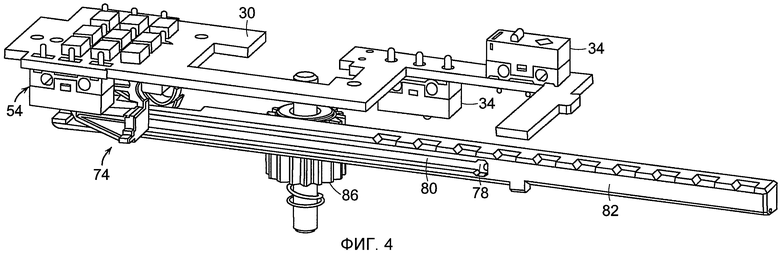
На фиг. 4 представлен перспективный вид в направлении сверху вниз передней части узла управления направлением, соответствующего различным вариантам осуществления изобретения, на котором показаны, помимо прочего, переключатель направления, ползунок, рейка и шестерня.
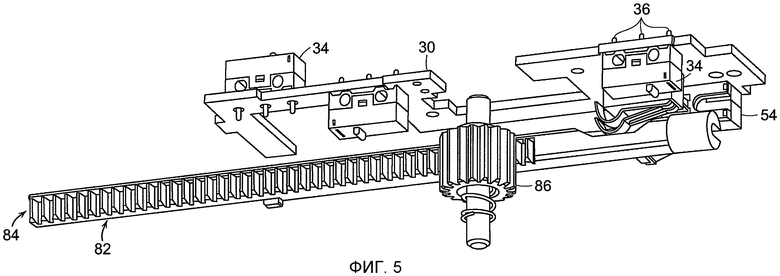
На фиг. 5 представлен перспективный вид в направлении снизу вверх задней части узла управления направлением, изображенного на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
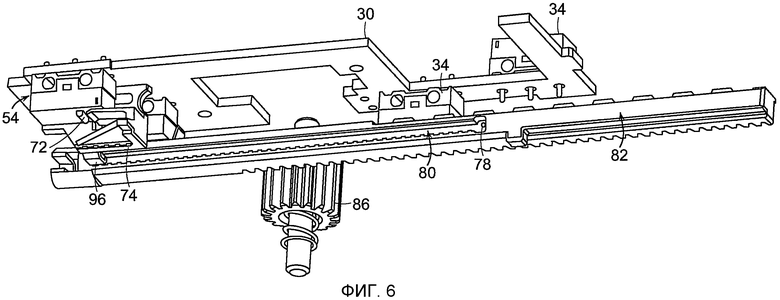
На фиг. 6 представлен перспективный вид в направлении снизу вверх передней части узла управления направлением, изображенного на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
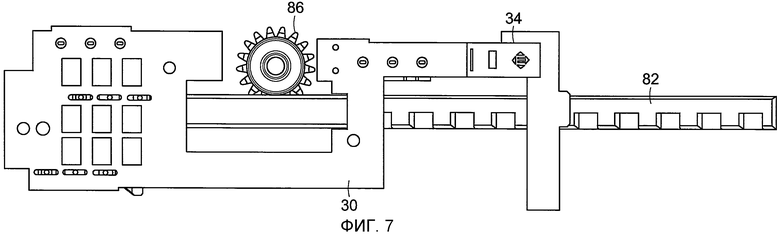
На фиг. 7 представлен вид сверху на узел управления направлением, изображенный на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
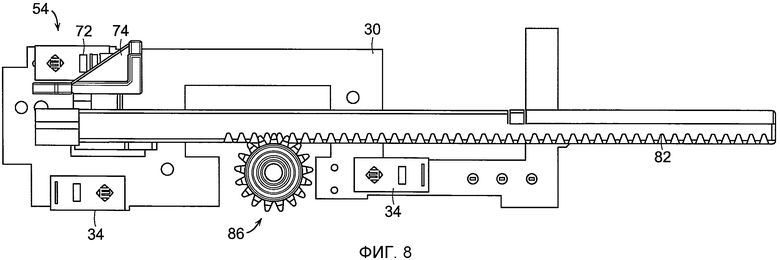
На фиг. 8 представлен вид снизу на узел управления направлением, изображенный на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
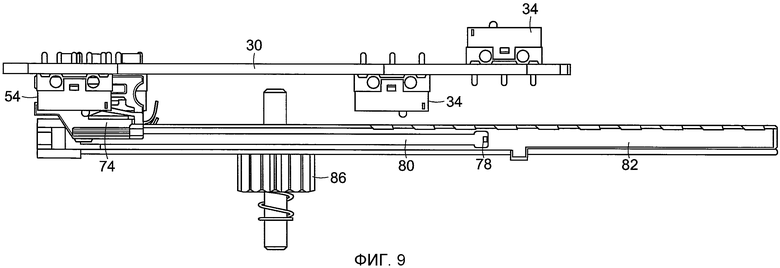
На фиг. 9 представлен вид спереди на узел управления направлением, изображенный на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
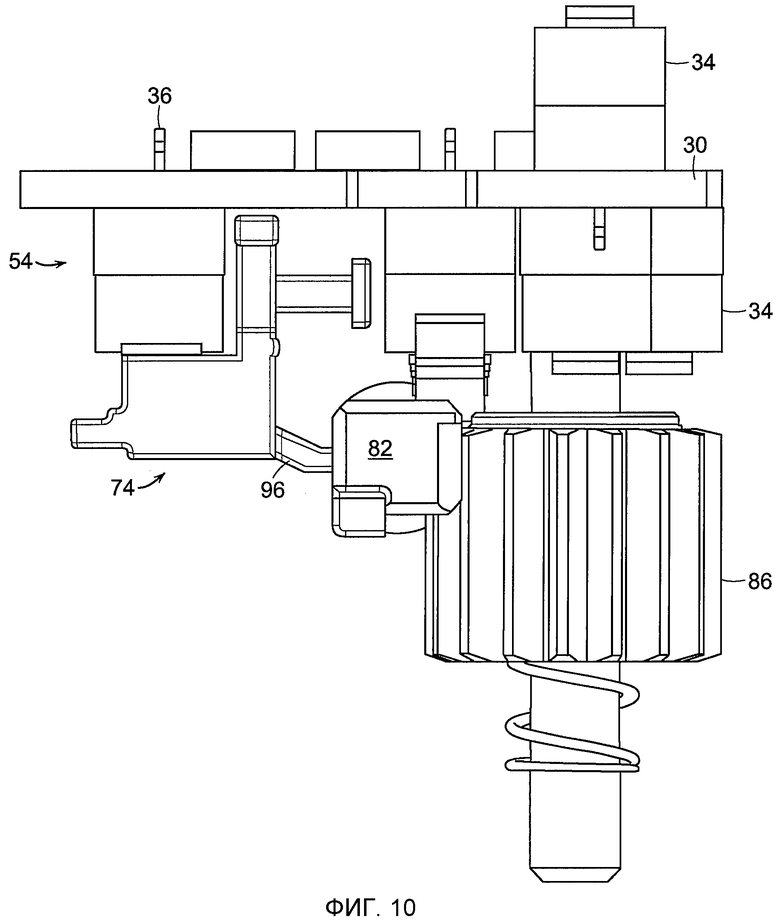
На фиг. 10 представлен вид с проксимальной стороны на узел управления направлением, изображенный на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
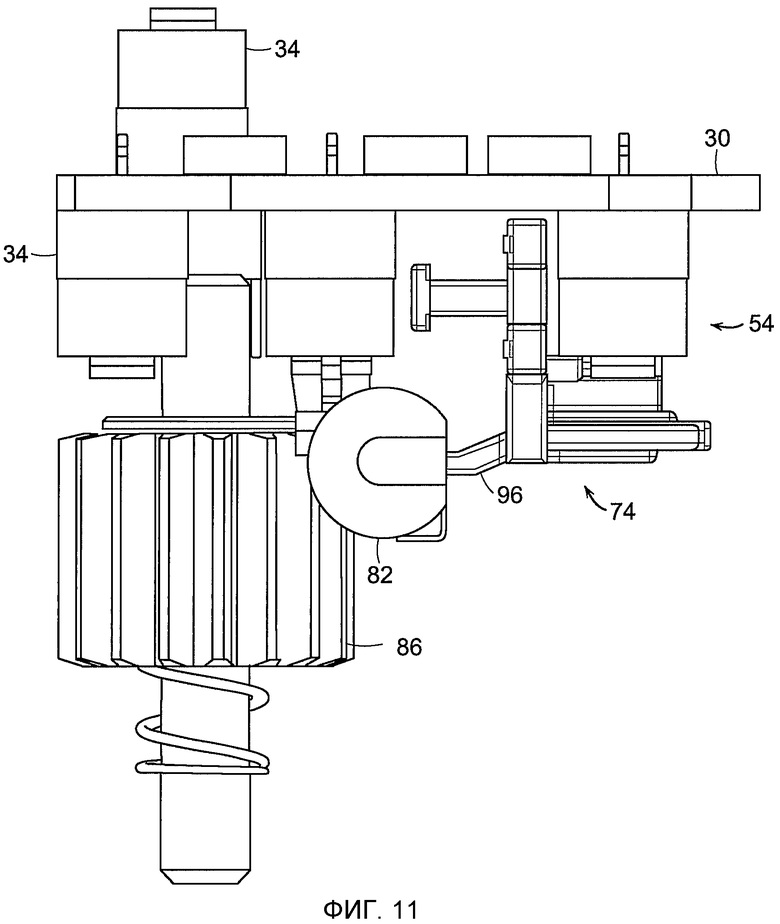
На фиг. 11 представлен вид с дистальной стороны на узел управления направлением, изображенный на фиг. 4, в соответствии с различными вариантами осуществления изобретения.
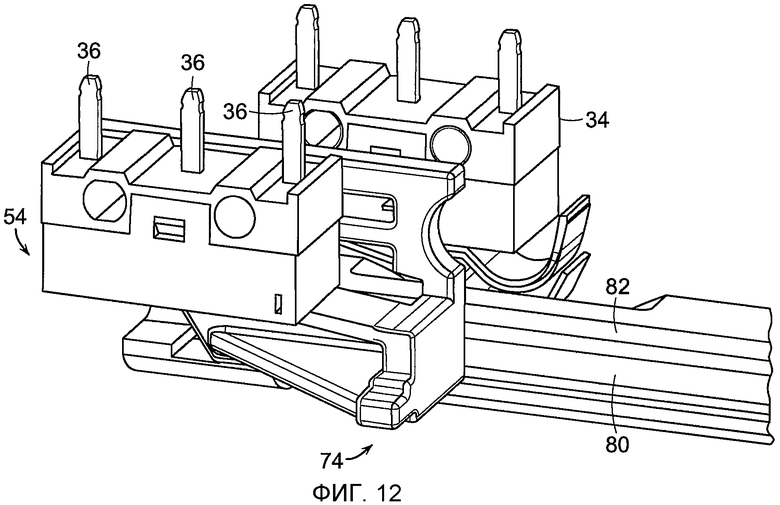
На фиг. 12 представлен перспективный вид в направлении сверху вниз передней части переключателя направления, ползунка и рейки узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
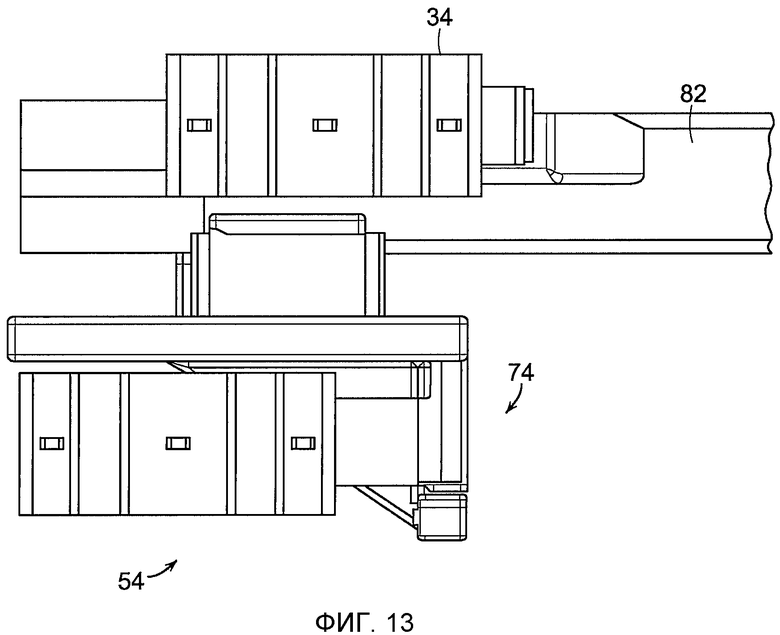
На фиг. 13 представлен вид сверху переключателя направления, ползунка и рейки узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
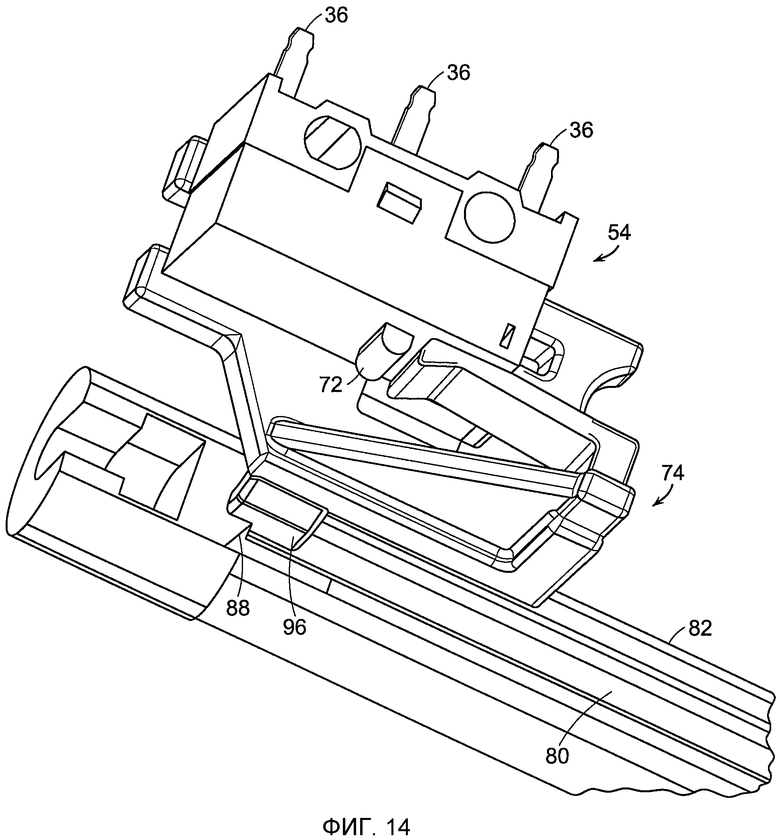
На фиг. 14 представлен перспективный вид в направлении снизу вверх передней части переключателя направления, ползунка и рейки узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
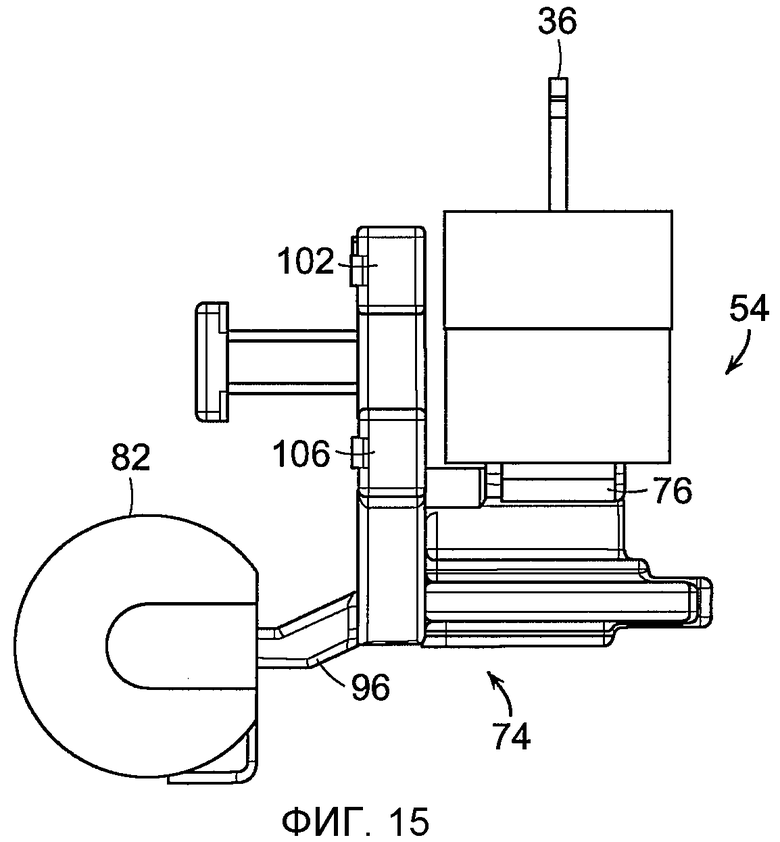
На фиг. 15 представлен вид с дистальной стороны на переключатель направления, ползунок и рейку узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
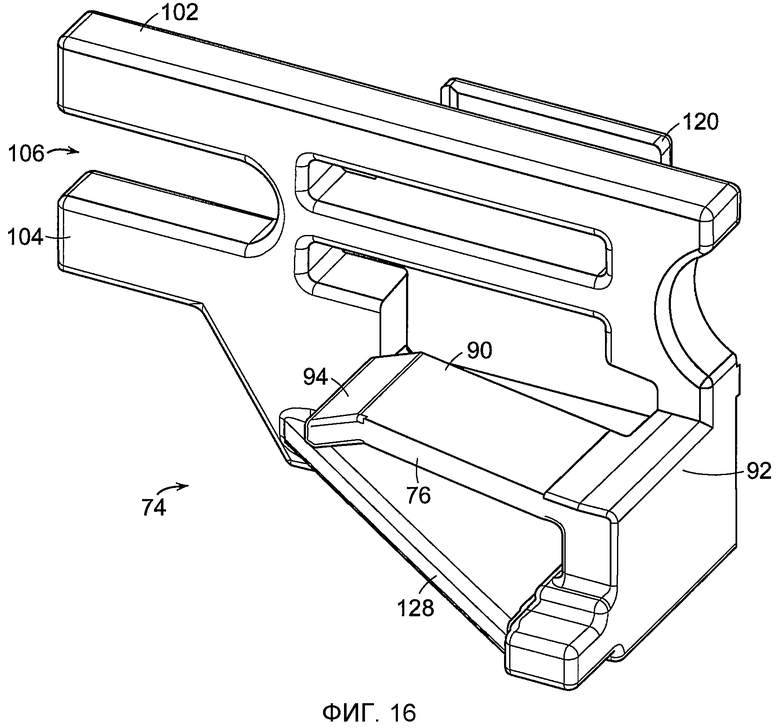
На фиг. 16 представлен перспективный вид в направлении сверху вниз передней части ползунка узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
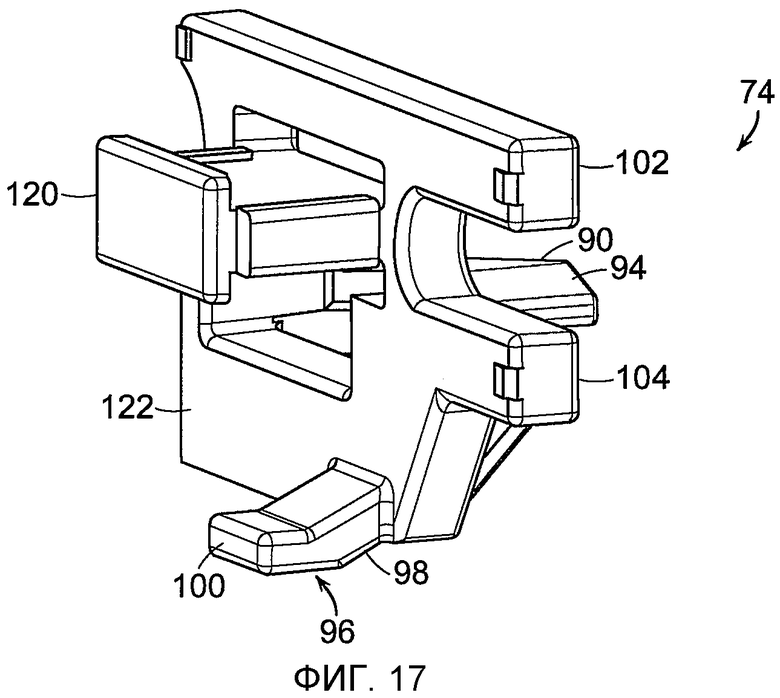
На фиг. 17 представлен вид сзади в перспективе ползунка узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
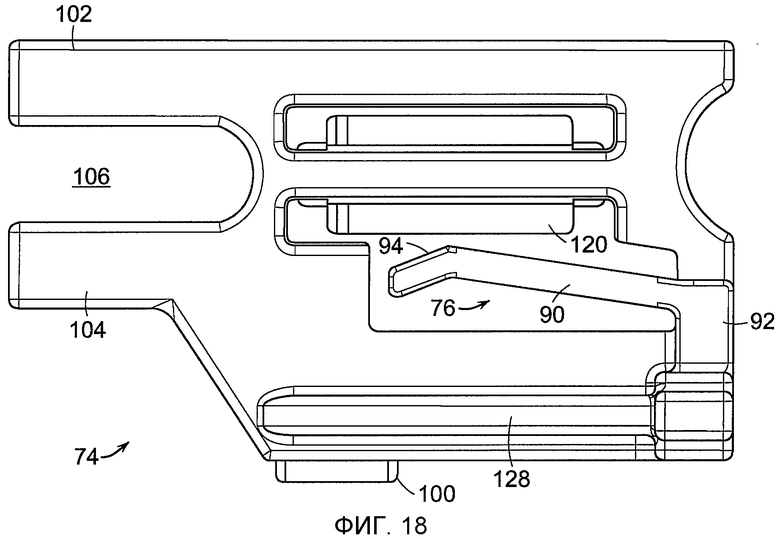
На фиг. 18 представлен вид спереди ползунка узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
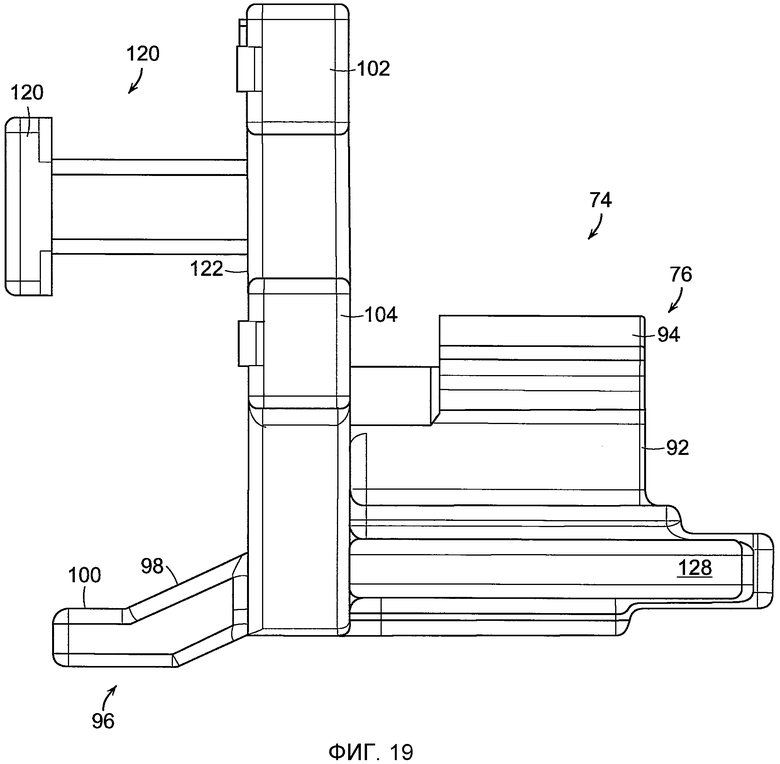
На фиг. 19 представлен вид с дистальной стороны ползунка узла управления направлением, в соответствии с различными вариантами осуществления изобретения.
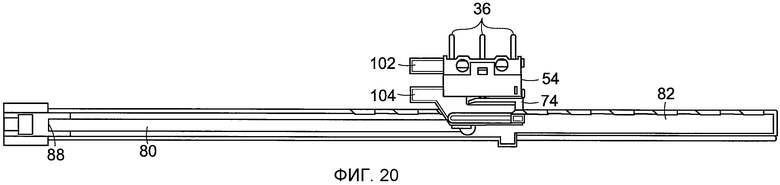
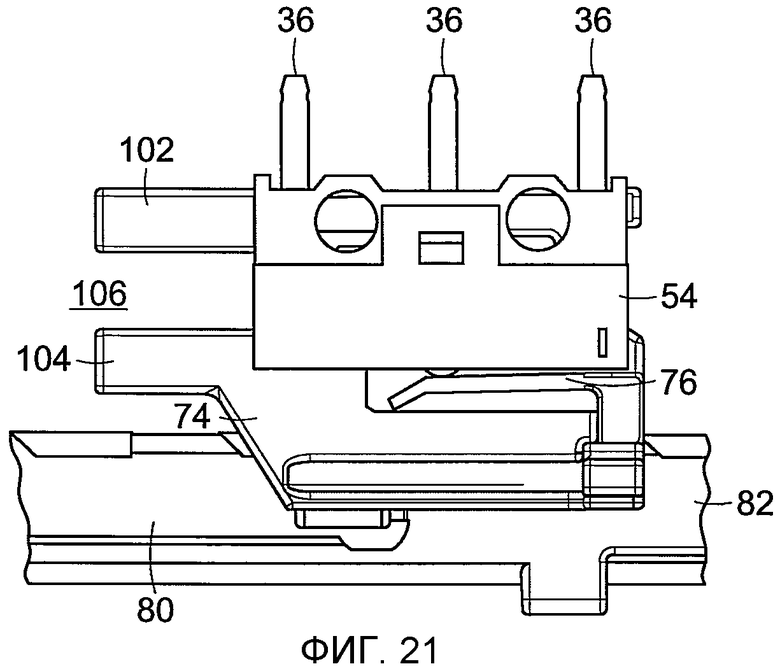
На фиг. 20-21 представлен вид спереди переключателя направления, ползунка и рейки, в соответствии с различными вариантами осуществления изобретения.
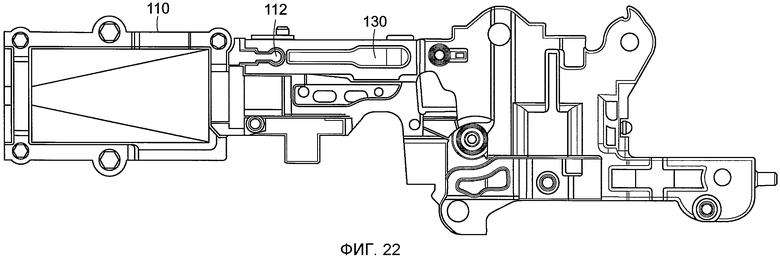
На фиг. 22 представлен вид спереди рамы в соответствии с различными вариантами осуществления изобретения.
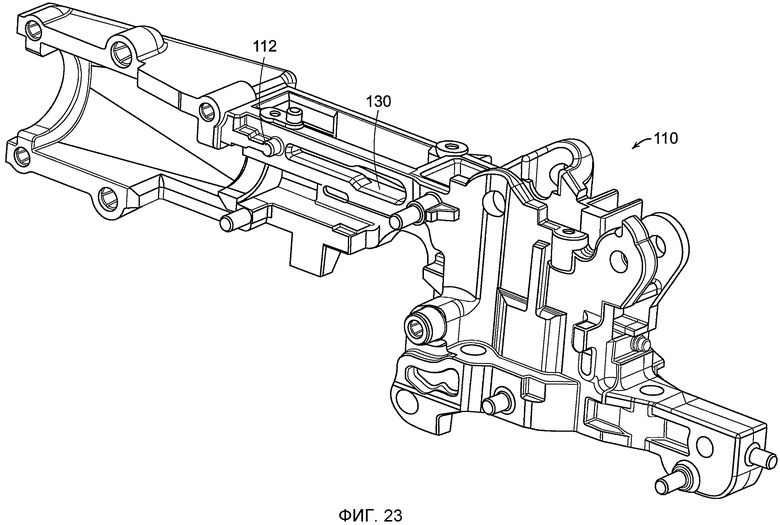
На фиг. 23 представлен вид спереди в перспективе рамы в соответствии с различными вариантами осуществления изобретения.
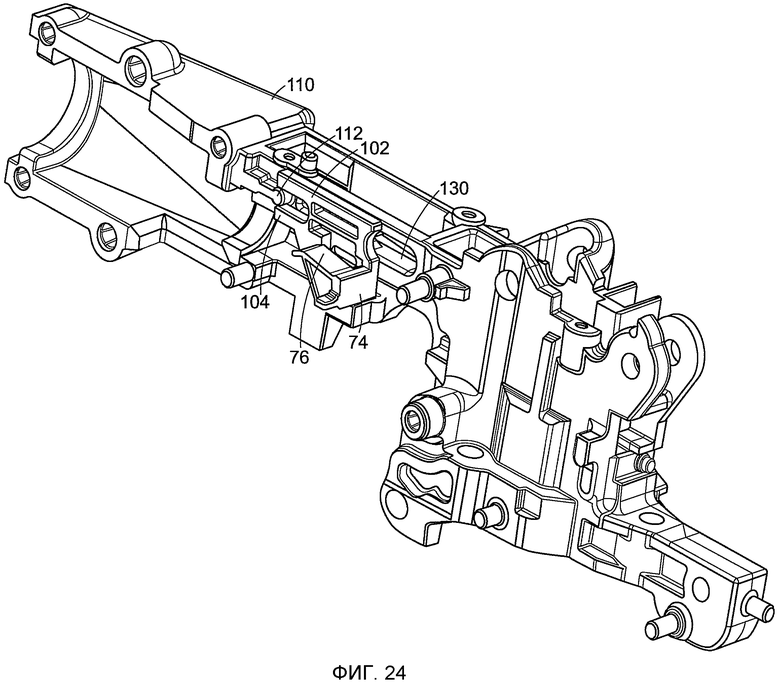
На фиг. 24 представлен вид спереди в перспективе рамы и ползунка в соответствии с различными вариантами осуществления изобретения.
На фиг. 25 представлен вид спереди рамы и ползунка, при этом ползунок находится в проксимальном положении, в соответствии с различными вариантами осуществления изобретения.
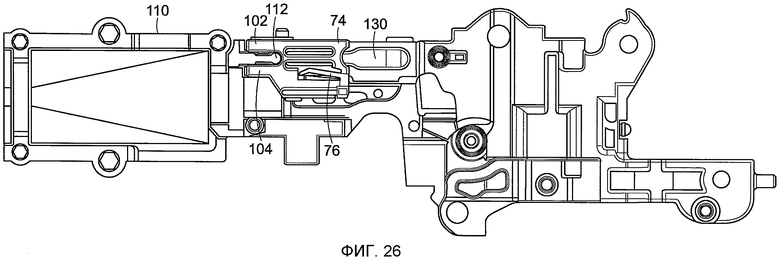
На фиг. 26 представлен вид спереди рамы и ползунка, при этом ползунок находится в дистальном положении, в соответствии с различными вариантами осуществления изобретения.
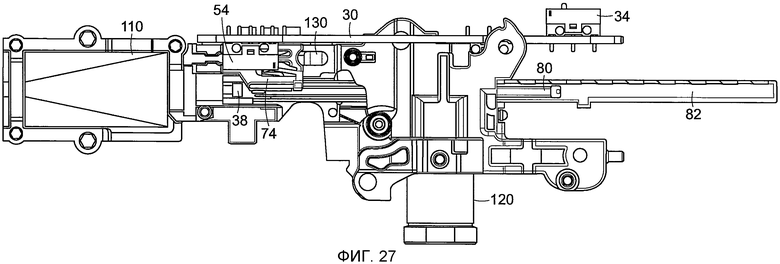
На фиг. 27 представлен вид спереди узла управления направлением, в соответствии с различными вариантами осуществления изобретения, на котором показаны, помимо прочего, печатная плата, переключатель направления, ползунок, рейка и рама.
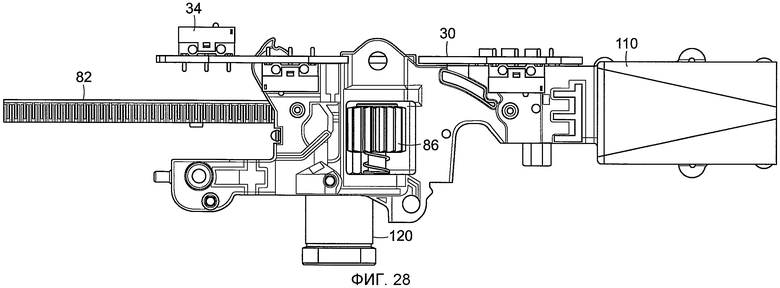
На фиг. 28 представлен вид сзади узла управления направлением, изображенного на фиг. 27, в соответствии с различными вариантами осуществления изобретения.
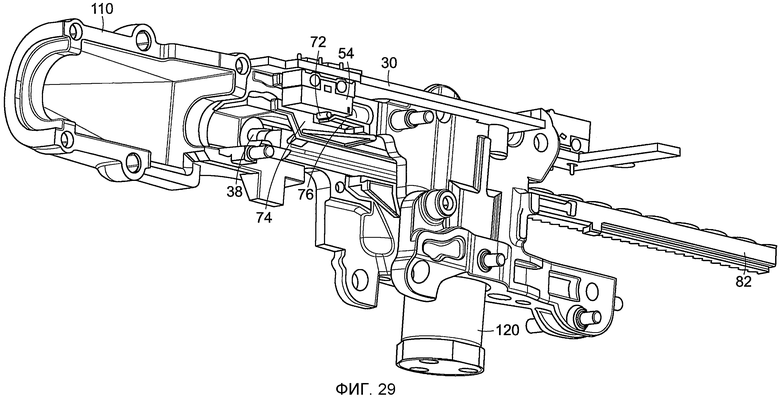
На фиг. 29 представлен перспективный вид в направлении снизу вверх передней части узла управления направлением, изображенного на фиг. 27, в соответствии с различными вариантами осуществления изобретения.
На фиг. 30 представлен перспективный вид сзади узла управления направлением, изображенного на фиг. 27, в соответствии с различными вариантами осуществления изобретения.
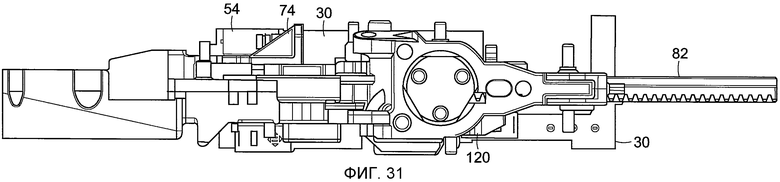
На фиг. 31 представлен вид снизу узла управления направлением, изображенного на фиг. 27, в соответствии с различными вариантами осуществления изобретения.
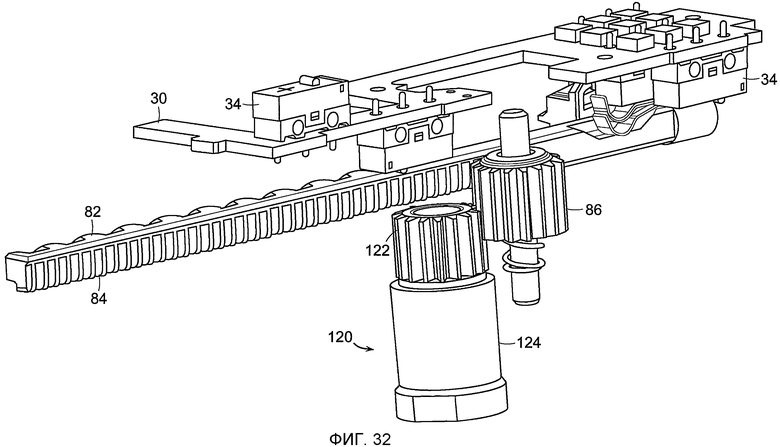
На фиг. 32 представлен перспективный вид сзади, на котором показаны печатная плата, рейка, шестерня и узел зубчатой передачи в соответствии с различными вариантами осуществления изобретения.
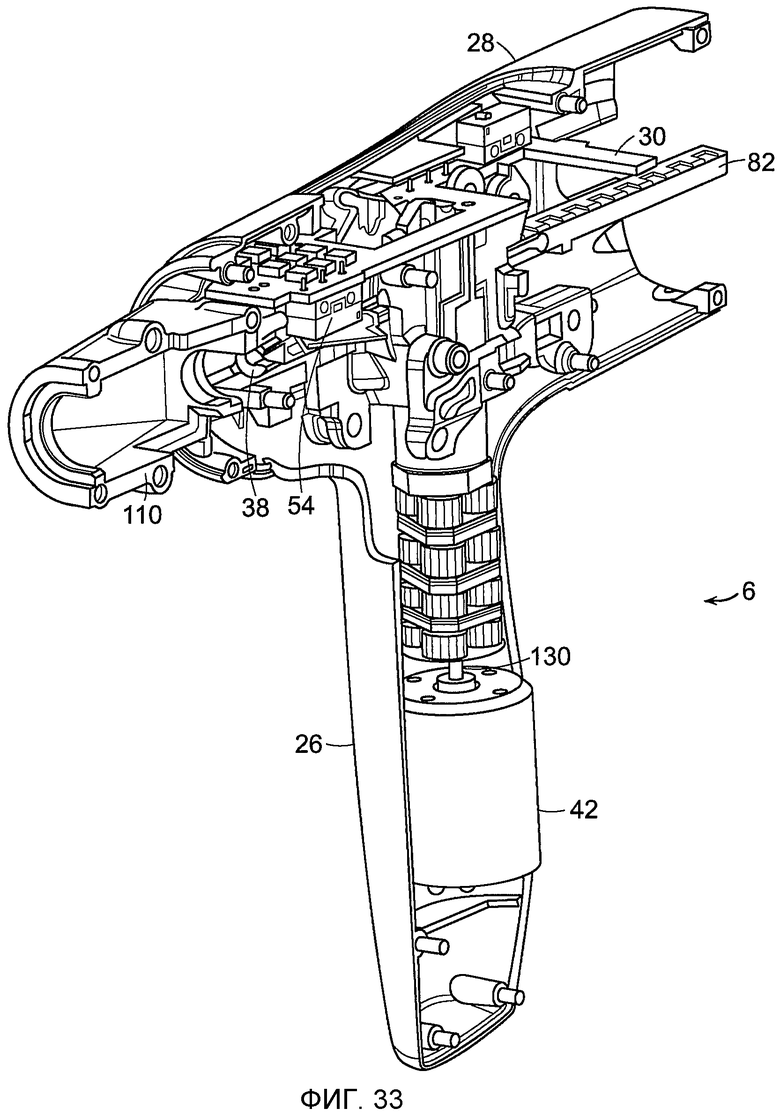
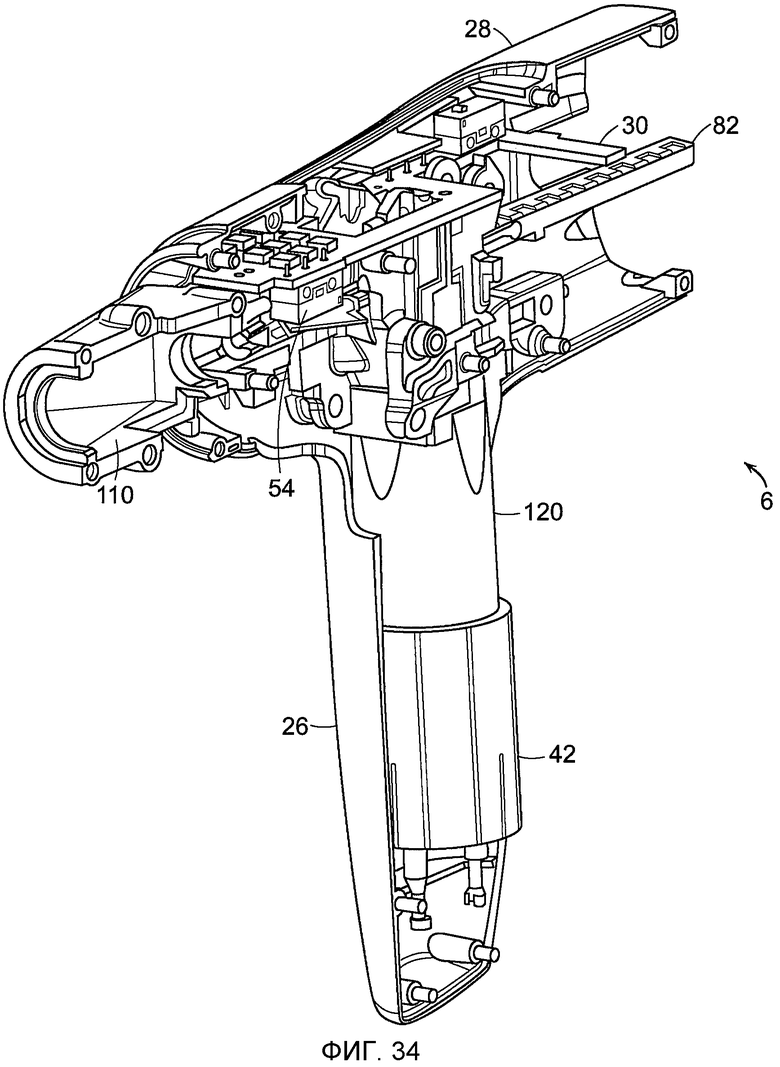
На фиг. 33-34 представлены перспективные виды рукоятки спереди и в разрезе в соответствии с различными вариантами осуществления изобретения.
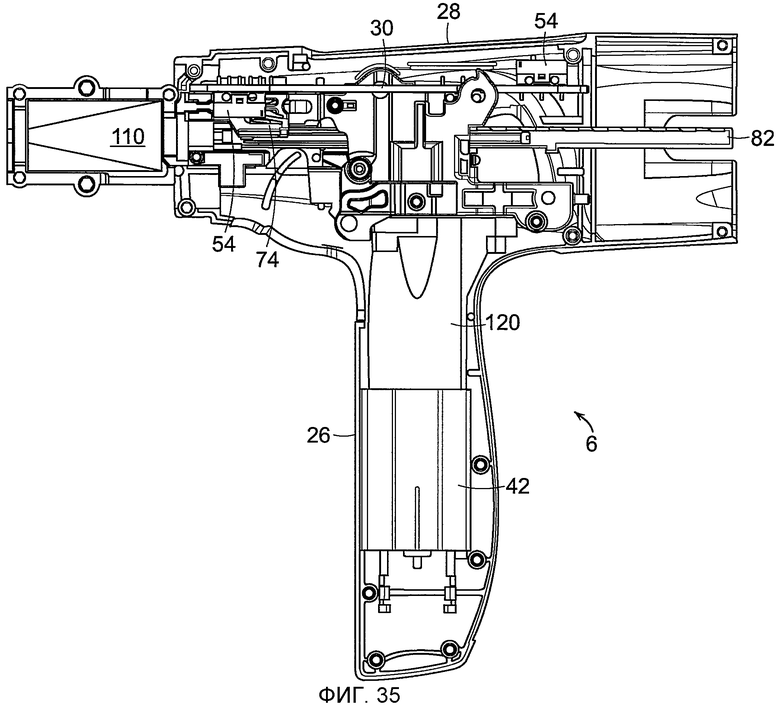
На фиг. 35 представлен вид передней части рукоятки в соответствии с различными вариантами осуществления изобретения.
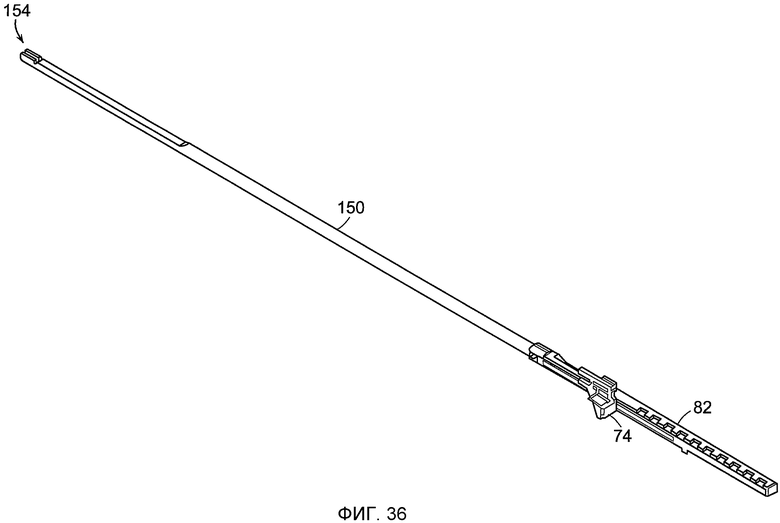
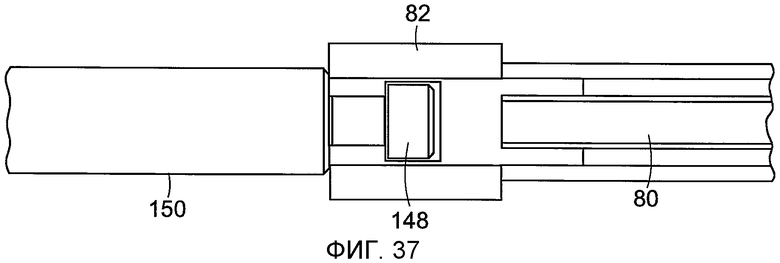
На фиг. 36-37 представлены схемы, на которых показано соединение рейки с приводным валом, в соответствии с различными вариантами осуществления изобретения.
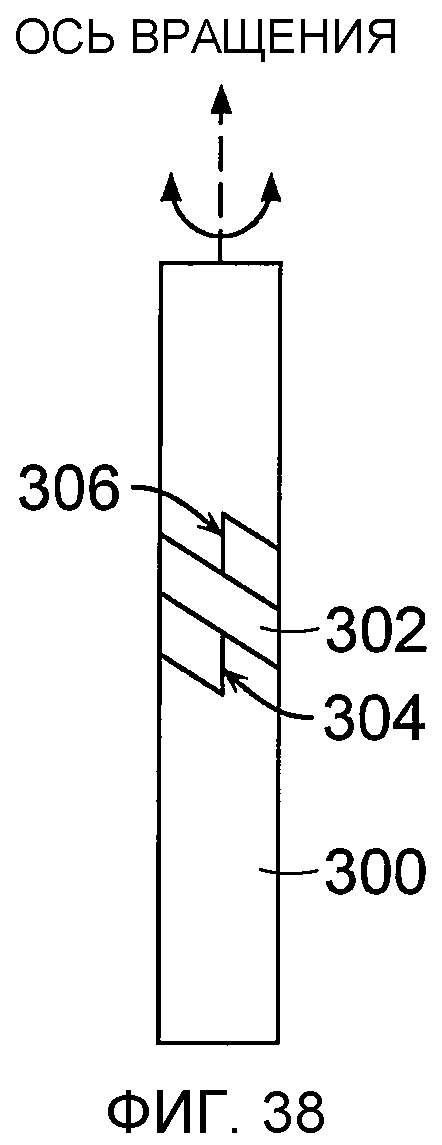
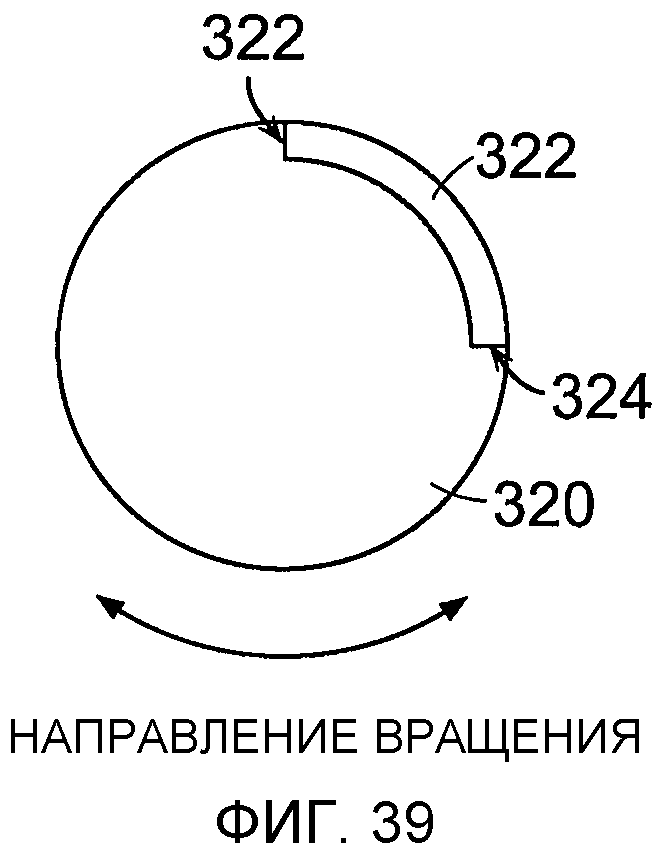
На фиг. 38-40 представлены приводные элементы в соответствии с другими вариантами осуществления настоящего изобретения.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Для более полного понимания конструкции, принципов работы, технологии производства и использования устройств и способов, описанных в настоящем документе, ниже приведено описание некоторых вариантов осуществления настоящего изобретения. Один или несколько примеров вариантов осуществления настоящего изобретения представлены на сопроводительных иллюстрациях. Специалистам в данной области будет понятно, что конкретные устройства и способы, описанные в настоящем документе и проиллюстрированные на сопроводительных фигурах, не являются ограничивающими вариантами осуществления настоящего изобретения, а также что объем данных вариантов осуществления определяется только формулой изобретения. Особенности, проиллюстрированные или описанные применительно к одному варианту осуществления, могут сочетаться с особенностями других вариантов осуществления. Предполагается, что объем прилагаемой формулы изобретения охватывает все такие модификации и изменения.
Как правило, варианты осуществления настоящего изобретения направлены на создание хирургического инструмента с приводом, который включает ползунок, перемещаемый механическим способом и предназначенный для приведения в действие электрического переключателя цепи управления приводом, которая управляет работой электропривода. Например, при срабатывании переключателя может изменяться полярность напряжения, подаваемого на привод, в результате чего меняется направление его вращения. На фиг. 1 и 2 представлен режущий и сшивающий хирургический инструмент 10 с приводом, который может включать ползунок, перемещаемый механическим способом, в соответствии с различными вариантами осуществления настоящего изобретения. Представленный на иллюстрациях вариант осуществления является эндоскопическим инструментом и в целом отражает варианты осуществления инструмента 10, описанные в настоящем документе, который представляет собой режущие и сшивающие инструменты. Однако необходимо отметить, что настоящее изобретение не ограничено этим и что в соответствии с другими вариантами осуществления настоящего изобретения указанный инструмент может быть неэндоскопическим хирургическим режущим и сшивающим инструментом, например, лапароскопическим инструментом.
Хирургический инструмент 10, изображенный на фиг. 1 и 2, включает рукоятку 6, вал 8 и концевой зажим 12, соединенный с валом 8. В различных вариантах осуществления концевой зажим 12 может быть шарнирно закреплен на шарнирном сочленении 14. Рядом с рукояткой 6 может располагаться устройство управления шарнирным сочленением 16, обеспечивающее вращение концевого зажима 12 на шарнирном сочленении 14. В представленном варианте осуществления концевой зажим 12 выполнен в виде режущего эндоскопического аппарата, предназначенного для фиксации, рассечения и сшивания тканей, однако в других вариантах осуществления могут использоваться иные типы концевых зажимов, предназначенные для других типов хирургических манипуляций, такие как зажимы, щипцы, рассекатели, клипсонакладыватели, устройства доступа, устройства для введения медикаментов/генной терапии, проведения ультразвуковых, радиочастотных или лазерных процедур и т.д. Более подробное описание радиочастотных устройств приведено в патенте США № 5403312 и заявке на патент США с регистрационным № 12/031573 «Хирургический режущий и сшивающий инструмент с РЧ-электродами», поданной 14 февраля 2008 года, которые полностью включены в настоящий документ путем ссылки.
Рукоятка 6 инструмента 10 может иметь закрывающее спусковое устройство 18 и пусковое устройство 20, приводящее в действие концевой зажим 12. Необходимо понимать, что инструменты с концевыми зажимами, предназначенные для выполнения различных хирургических манипуляций, могут иметь разное количество и типы пусковых устройств или иных соответствующих средств управления концевым зажимом 12. На фигуре показано, что концевой зажим 12 отделен от рукоятки 6 удлиненным валом 8. В одном варианте осуществления хирург или оператор инструмента 10 может вращать концевой зажим 12 относительно вала 8, используя устройство управления шарнирным сочленением 16, как более подробно описано в опубликованной заявке на патент США № 2007/0158385 A1 «Хирургические инструменты с шарнирным концевым зажимом» (автор Geoffrey C. Hueil и др.), полностью включенной в настоящий документ путем ссылки.
В приведенном примере концевой зажим 12, помимо прочего, имеет желоб для скоб 22 и поворотный зажимный элемент, например, упорную пластину 24, между которыми поддерживается расстояние, обеспечивающее эффективное сшивание и рассечение тканей, захваченных концевым зажимом 12, когда упорная пластина 24 находится в зажатом положении. Рукоятка 6 включает направленную вниз пистолетную рукоятку 26, к которой хирург прижимает закрывающий спусковой крючок 18 для зажатия или прижатия упорной пластины 24 к желобу для скоб 22 концевого зажима 12, чтобы зажать ткань, размещенную между упорной пластиной 24 и желобом 22. Пусковое устройство 20 расположено снаружи относительно закрывающего спускового крючка 18. Когда закрывающий спусковой крючок 18 фиксируется в положении закрытия, пусковой крючок 20 может несколько проворачиваться к пистолетной рукоятке 26, так что оператор сможет достать его одной рукой. Затем оператор может прижать пусковой крючок 20 к пистолетной рукоятке 12, осуществляя сшивание и рассечение ткани, зажатой в концевом зажиме 12. В других вариантах осуществления могут использоваться другие типы зажимающих элементов, помимо упорной пластины 24. Рукоятка 6 также может включать верхнюю часть 28, расположенную поверх руки пользователя, когда пользователь захватывает пистолетную рукоятку 26 рукой.
Необходимо принять во внимание, что термины «проксимальный» и «дистальный» используются в настоящем документе по отношению к хирургу, удерживающему рукоятку 6 инструмента 10. Так, концевой зажим 12 расположен дистально по отношению к рукоятке 6, расположенной более проксимально. Необходимо также принять во внимание, что для удобства и ясности такие пространственные термины как «вертикальный» и «горизонтальный» используются в настоящем документе по отношению к фигурам. Однако использование хирургических инструментов предполагает множество ориентаций и положений, поэтому указанные термины не являются абсолютными и ограничивающими настоящее изобретение.
При использовании инструмента сначала может быть нажат закрывающий спусковой крючок 18. Когда хирурга устраивает положение концевого зажима 12, он может оттянуть закрывающий спусковой крючок 18 в фиксированное положение полного закрытия, вплотную к пистолетной рукоятке 26. После этого может быть нажат пусковой крючок 20. Когда хирург отпускает пусковой крючок 20, крючок возвращается в открытое положение (см. фиг. 1 и 2). Для того чтобы разблокировать закрывающий спусковой крючок 18, необходимо нажать фиксирующую кнопку на рукоятке 6 Фиксирующая кнопка может быть выполнена в различных формах, например, как описано в опубликованной заявке на патент США № 2007/0175955 «Хирургический режущий и сшивающий инструмент с механизмом фиксации закрывающего спускового крючка», которая полностью включена в настоящий документ путем ссылки.
Концевой зажим 12 может включать режущий инструмент, такой как скальпель, для рассечения зафиксированной в концевом зажиме 12 ткани при нажатии пользователем пускового крючка 20. Концевой зажим 12 может также включать средства закрепления рассеченной режущим инструментом ткани, такие как скобы, РЧ-электроды, клеи и т.д. Более подробное описание возможных конфигураций концевого зажима 12 можно найти в следующих патентах и опубликованных заявках на патент, которые полностью включены в настоящий документ путем ссылки: патент № 5709680, патент № 5688270, патент № 7000818, заявка № 2005/0173490 A1, заявка № 2006/0025809 A1, заявка № 2007/0102453 A1, № 2007/0102452 A1, заявка № 2009/0206134 A1 и заявка № 2009/0206124 A1.
В состав инструмента 10 также может входить закрывающая система для закрытия (фиксации) концевого зажима при закрытии (прижимании) закрывающего спускового крючка 18. Более подробное описание вариантов осуществления возможной закрывающей системы для закрытия (фиксации) упорной пластины 24 концевого зажима 12 при прижимании закрывающего спускового крючка 18 можно найти в следующих патентных документах США, которые полностью включены в настоящий документ путем ссылки: опубликованная заявка на патент № 2004/0232196 A1, опубликованная заявка на патент № 2007/0125956 A1, опубликованная заявка на патент № 2007/0158385 A1, опубликованная заявка на патент 2007/0175962 A1, патент № 7464849, а также в документах, процитированных в предыдущем параграфе.
Продольно перемещаемый приводной вал, расположенный внутри вала 8 инструмента 10, может приводить в действие режущий инструмент и сшивающее устройство в концевом зажиме 12. Для непрямого управления приводным валом может использоваться электропривод, расположенный в пистолетной рукоятке 26 рукоятки 6 инструмента 10. В различных вариантах осуществления привод может представлять собой коллекторный двигатель постоянного тока с максимальной скоростью вращения приблизительно 25000 об/мин. В других вариантах осуществления привод может представлять собой бесколлекторный двигатель, беспроводной двигатель, синхронный двигатель, шаговый двигатель или любой другой соответствующий электропривод. В пистолетной рукоятке 26 рукоятки 6, рядом с приводом, может быть размещена батарея (или источник энергии, или блок питания), например, литий-ионная батарея. Батарея обеспечивает подачу электроэнергии к приводу через цепь управления приводом. В соответствии с различными вариантами осуществления в качестве источника энергии для подачи энергии на привод может использоваться несколько последовательно соединенных элементов питания. Кроме того, источник энергии может быть сменным и (или) перезаряжаемым.
На фиг. 3 представлена схема цепи управления приводом 40, которая используется для подачи энергии на электропривод 42, с питанием от батареи 44. В представленном на фигуре варианте осуществления, когда переключатель пуска привода 46 замкнут (на фиг. 3 он показан в разомкнутом состоянии), а также когда предохранительный выключатель 48 тоже замкнут (на фиг. 3 он показан в разомкнутом состоянии), показывая, что предохранитель устройства включен, а блокировочный переключатель 50 (в обычном состоянии он замкнут) разомкнут, показывая, что инструмент 10 не заблокирован, то ток проходит через предохранительный выключатель 48 и индикатор блокировки 52 (который, как показано на фиг. 3, может представлять собой светодиод, расположенный с внешней стороны рукоятки 6 так, чтобы его мог видеть оператор инструмента 10) к приводу 42. Переключатель пуска привода 46 может быть приведен в действие (то есть может замыкаться), когда оператор инструмента 10 нажимает на пусковой крючок 20.
При достижении конца режущего хода, то есть, например, когда режущий инструмент, расположенный в концевом зажиме, достигает конца рабочего хода, переключатель конца рабочего хода или переключатель направления 54 переходит в замкнутое состояние, в результате чего изменяется полярность напряжения, подаваемого на привод 42, и привод 42 начинает вращаться в обратную сторону (если при этом оператор отпустил или разомкнул пусковой переключатель 46). В этом состоянии ток также проходит через индикатор обратного направления 56, который, например, представляет собой светодиод, расположенный на внешней поверхности рукоятки 6, который наглядно показывает оператору, что направление вращения привода 42 было изменено.
Как показано на фиг. 3, цепь также может включать ручной переключатель возврата 58. Оператор может вручную нажать на переключатель 58, если режущий инструмент, расположенный в концевом зажиме 12, прошел лишь часть рабочего хода. При нажатии на ручной переключатель возврата 58 привод 42 вращается в обратную сторону, в результате чего режущий инструмент возвращается в исходное положение. Переключатели цепи управления приводом 40, в соответствии с различными вариантами осуществления изобретения, не являются частью интегральной схемы (ИС). Например, в различных вариантах осуществления каждый из переключателей может представлять собой отдельный микропереключатель или другой переключатель, не входящий в состав интегральной схемы.
Дополнительные варианты осуществления цепи управления приводом 40 описаны в заявке на патент США с регистрационным № 12/235782, которая полностью включена в настоящий документ путем ссылки.
На фиг. 4-15 представлены изображения узла управления хирургическим инструментом 70, предназначенного для включения переключателя, например, переключателя направления 54 цепи управления приводом 40, в соответствии с различными вариантами осуществления настоящего изобретения. Переключатель направления 54 может представлять собой, например, монтируемый на плате микропереключатель, который может быть установлен на нижней поверхности печатной платы 30 на контактах 36. Печатная плата 30 может располагаться в верхней части 28 рукоятки 6 (см. фиг. 1-2). Другие компоненты цепи управления приводом 40 могут быть установлены на печатной плате 30 и могут быть соединены токопроводящими дорожками печатной платы 30. Например, другие переключатели цепи управления приводом 40 также могут представлять собой монтируемые на плате микропереключатели, устанавливаемые на верхней и нижней поверхностях печатной платы 30. Другие электронные переключатели показаны на фиг. 4-15 в виде элемента 34.
Из фиг. 5-6 и 8-9 понятно, что переключатель направления 54 может содержать подвижный (например, нажимной) исполнительный элемент переключателя (например, поршень) 72. В различных вариантах осуществления при нажатии на нажимной исполнительный элемент 72 переключатель 54 замыкается, в результате чего изменяется направление вращения привода (если пусковой переключатель 46 также был отпущен или разомкнут оператором). С другой стороны, при отпускании нажимного исполнительного элемента 72, как показано на фиг. 5-6 и 8-9, переключатель направления 54 размыкается. Как правило, в настоящем документе описаны варианты осуществления, в которых узел управления направлением 70 используется для приведения в действие переключателя направления вращения в цепи управления приводом хирургического инструмента с приводом. Однако необходимо отметить, что узел управления 70 может использоваться для приведения в действие переключателя другого назначения в устройстве другого типа или инструменте, и настоящее изобретение не ограничено вариантами осуществления, в которых узел управления используется для приведения в действие переключателя направления вращения привода.
Нажимной исполнительный элемент переключателя 72 может приводиться в действие или может быть приведен в действие ползунком 74, который может быть, например, единой деталью из пластика, полученной путем литья под давлением. В других вариантах осуществления ползунок 74 может представлять собой сочетание множества отдельных деталей. Некоторые детали могут быть изготовлены из материала, отличного от пластика. На фиг. 16-19 представлено изображение ползунка 74 в соответствии с различными вариантами осуществления изобретения. На фиг. 16 представлен перспективный вид спереди. На фиг. 17 представлен перспективный вид сзади. На фиг. 18 представлен вид спереди. На фиг. 19 представлен вид с дистальной стороны. Как показано в проиллюстрированном варианте осуществления, ползунок 74 может содержать консольный рычаг 76. Как показано на фиг. 4-15, консольный рычаг 76 ползунка 74 входит в контакт с нажимной исполнительный элемент 72 переключателя 54, когда ползунок 74 продвигается или проталкивается проксимальным плечом 78 желоба, которое расположено на проксимальной стороне желоба 80, образуемого передней стороной рейки 82. На задней стороне рейки 82 может быть расположена серия зубцов 84, соответствующих канавкам шестерни 86. Шестерня 86 сцеплена и приводится в движение выходным зубчатым колесом привода 42. Таким образом, рейка 82 может перемещаться в продольном направлении в дистальную или проксимальную сторону путем вращения шестерни 86 в прямом или обратном направлении.
Как показано на фиг. 5-6, 9, 11, 13-15, на дистальном конце рейки 82 может быть предусмотрено отверстие 38, в которое вводится проксимальный конец приводного вала, приводящего в движение концевой зажим 12. На фиг. 36-37 показан проксимальный конец 148 приводного вала 150, установленный в отверстие 38 рейки 82. При такой конфигурации продольное движение рейки 82 (вызываемое вращением шестерни 86, приводимой в движение приводом 42) приводит к движению приводного вала 150 продольном направлении, приводя в движение или останавливая компоненты концевого зажима 12, например, режущего инструмента 154.
При движении рейки 82 в проксимальном направлении дистальное плечо 88 желоба 80 может продвигать или проталкивать ползунок 74 в проксимальном направлении. Такое движение ползунка выводит консольный рычаг 76 из контакта с исполнительным элементом 72, и исполнительный элемент 72 становится ненажатым, а переключатель направления 54 - разомкнутым.
Как показано, например, на фиг. 16-19, консольный рычаг 76 может иметь первую часть 90 с уклоном вверх, которая отходит от основной части 92 ползунка 74, и вторую часть 94 с уклоном вниз, которая отходит от первой части 90. Когда ползунок 74 продвигается или проталкивается в дистальном направлении, вторая часть 94 консольного рычага 76 может входить в контакт с и нажимать на нажимной исполнительный элемент 72 переключателя 54. В различных вариантах осуществления ползунок 74 может продвигаться в дистальном направлении так, чтобы вторая часть 94 двигалась в дистальном направлении мимо исполнительного элемента 72, в результате чего первая часть 90 консольного рычага 76 будет удерживать исполнительный элемент 72 в нажатом состоянии
Также, как показано на фиг. 16-19, ползунок 74 может включать язычок 96, который жестко отходит от ползунка 74. Язычок 96 может иметь первую часть 98, которая отходит от задней части 122 ползунка 74, и вторую часть 100, которая отходит от первой части 98. Вторая часть 100 язычка 96 может подвижно располагаться в желобе 80 рейки 82, как показано на фиг. 6, 10-11 и 14-15. Язычок 96 может проталкиваться проксимальным плечом 78 или дистальным плечом 88 желоба 80 при движении рейки 82 в продольном направлении в проксимальную или дистальную сторону соответственно, в результате чего ползунок 74 движется в проксимальную или дистальную сторону с язычком 96.
Ползунок 74 также может содержать распорку 128, которая проходит между основной частью 92 и задней частью 122. Распорка 128 может придавать ползунку 74 устойчивость, снижая подвижность задней части 122 и основной части 92 относительно друг друга. Как показано на фигурах, в различных вариантах осуществления распорка 128 может располагаться перпендикулярно как относительно задней части 122, так и относительно основной части 92.
На фиг. 4, 6, 9, 12 и 14 ползунок 74 представлен так, что он расположен на дистальном конце желоба 80 рейки 82. В этом положении при движении рейки 82 в проксимальном направлении дистальное плечо 88 желоба входит в контакт с язычком 96 ползунка 74, толкает язычок 96 и, следовательно, ползунок 74, в крайнее проксимальное положение, в котором нажимной исполнительный элемент 72 переключателя отключается (например, переходит в ненажатое состояние). На фиг. 20 и 21 ползунок 74 показан в проксимальном конце желоба 80 рейки 82. В этом положении при движении рейки 82 в дистальном направлении проксимальное плечо 78 желоба входит в контакт с 76 ползунка 74, толкает язычок 96 и, следовательно, ползунок 74, в крайнее дистальное положение, в котором нажимной исполнительный элемент 72 переключателя 54 приводится в действие (например, переходит в нажатое состояние).
Таким образом, после перемещения ползунка 74 в дистальном направлении и приведения в действие переключателя 54 ползунок 74 остается в крайнем дистальном положении, а переключатель 54 остается приведенным в действие с помощью ползунка 74, даже когда рейка 82 изменяет направление движения и движется в проксимальную сторону. Это продолжается до тех пор, пока дистальное плечо 88 не войдет в контакт с язычком 96 и не передвинет ползунок 74 в проксимальное положение, тогда ползунок 74 перестает приводить в действие переключатель 54. Аналогичным образом, после перемещения ползунка 74 в проксимальном направлении и отключения переключателя 54 ползунок 74 не находится в контакте с переключателем 54, и переключатель 54 не приведен в действие, даже когда рейка 82 меняет направление движения и движется в проксимальную сторону. Это продолжается до тех пор, пока проксимальное плечо 78 не войдет в контакт с язычком 96 и не передвинет ползунок 74 назад в крайнее дистальное положение, приводящее в действие переключатель.
На фиг. 16-19 также показано, что ползунок 74 может иметь верхнее плечо 102 и нижнее плечо 104, которые образуют U-образный канал 106. U-образный канал 106 может входить в контакт со стопором на раме, удерживающим печатную плату 30, при перемещении ползунка 74 в крайнее дистальное положение, как более подробно описано ниже. Стопор может плотно входить в U-образный канал 106, и плотность этого соединения удерживает ползунок 74 в крайнем дистальном положении, даже когда рейка 82 двигается в проксимальном направлении. В различных вариантах осуществления давление, оказываемое дистальным плечом желоба 88 на язычок 96, достаточно для того, чтобы отделить U-образный канал 106 от стопора на раме. Это позволяет дистальному плечу желоба 88 вытолкнуть ползунок 74 из крайнего дистального положения (показано на фиг. 4, 6, 9, 12 и 14) в проксимальное положение (показано на фиг. 20-21). Следовательно, ползунок 74 движется не вместе с рейкой 82, а только тогда, когда одно из плеч желоба 78 и 88 рейки 82 входит в контакт с язычком 96, находящимся в желобе 80 рейки, и толкает ползунок 74.
Как указано выше, U-образный канал 106, создаваемый ползунком 74, входит в контакт со стопором на раме в рукоятке 6 инструмента 10. На фиг. 22 и 23 изображена часть рамы 110 со стопором 112. Как показано на фигурах, стопор 112 может отходить от боковой части рамы 110, обращенной к ползунку 74. Стопор 112 может быть такой формы, чтобы он плотно входил в U-образный канал 106 в ползунке 106, когда ползунок 74 находится в крайнем дистальном положении. На фиг. 22 представлен вид рамы 110 сбоку, а на фиг. 23 представлен перспективный вид рамы 110. Рама 110 может быть изготовлена, например, из пластика. Инструмент 10 может содержать вторую деталь рамы (не показана), которая присоединяется к раме 110.
На фиг. 24-26 показаны рама 110 и ползунок 74. Другие компоненты узла управления направлением 70 на фиг. 24-26 не показаны для удобства. На фиг. 24 представлен перспективный вид спереди рамы 110 с ползунком 74, который находится в проксимальном положении, а U-образный канал 106 не входит в контакт со стопором 112 рамы 110. На фиг. 25 представлен вид спереди ползунка 74, который находится в проксимальном положении. Когда ползунок 74 находится в проксимальном положении, консольный рычаг 76 ползунка 74 в нормальных условиях не давит на нажимной исполнительный элемент 72 переключателя 54. С другой стороны, на фиг. 26 представлен вид спереди на ползунок 74, который находится в крайнем дистальном положении. Когда ползунок 74 находится в крайнем дистальном положении, консольный рычаг 76 в нормальных условиях давит на нажимной исполнительный элемент 72 переключателя 54.
Как показано на фиг. 16-19, ползунок 74 также может содержать язычок рамы 120, который отходит от задней части 122 ползунка 74. Ползунок рамы 120 может иметь шейку 124 и головку 126. Шейка 124 может входить в прорезь 130 в боковой части рамы 110, обращенной к ползунку 74 (см., например, фиг. 22-27). Прорезь 130 может ограничивать движения ползунка 74 относительно рамы 110, когда рейка 82 перемещает ползунок 74, как описано выше.
На фиг. 27-31 показана рама 100 с печатной платой 30, ползунком 74, рейкой 82 и шестерней 86. Печатная плата 30 может присоединяться к верхней поверхности рамы 110, например, винтами или иным способом установки. На этих фигурах также показаны части узла зубчатых колес 120, который соединяется с шестерней 86. Узел зубчатых колес 120 может соединять выходной приводной вал привода 42 с шестерней 86. На фиг. 27 представлен вид спереди. На фиг. 28 представлен вид сзади. На фиг. 29 представлен перспективный вид передней стороны с дистального конца. На фиг. 30 представлен перспективный вид задней стороны с проксимального конца. На фиг. 31 представлен вид снизу.
На фиг. 32 представлен перспективный вид сзади, на котором показан узел зубчатых колес 120, соединенный с шестерней 86 (без рамы 110). Как показано на фиг. 32, узел зубчатых колес 120 может включать (i) верхнее зубчатое колесо 122, сцепленное с шестерней 86, и (ii) узел нижних зубчатых колес, закрытый крышкой узла нижних зубчатых колес 124 и вращающий верхнее зубчатое колесо 122. Узел нижних зубчатых колес может быть соединен с приводом 42, как показано на фиг. 33-35. На этих фигурах изображен привод 42 с приводным валом 130, который соединен с узлом зубчатых колес 120. Как показано на фигурах, привод 42 может размещаться в ручке пистолетного типа 26 рукоятки 6. На фигурах также показано, как рама 110 помещается в верхнюю часть 28 рукоятки 6, в соответствии с различными вариантами осуществления изобретения. Батарея 44 (на фиг. 33-36 не показана) может находиться в ручке пистолетного типа 26 рукоятки 6 ниже привода 42.
Кроме того, хотя в описанных выше вариантах осуществления для выполнения возвратно-поступательных продольных движений рейки используется шестерня, в других вариантах осуществления могут применяться другие устройства, выполняющие возвратно-поступательные продольные движения рейки. Например, для выполнения возвратно-поступательных продольных движений рейки может использоваться винтовая передача. Также в других вариантах осуществления желоб 80 рейки 82 может содержать один или несколько клиньев (кулачков), приводящих к движению ползунка 74, как правило, перпендикулярно направлению движения рейки 82, когда язычок 96 ползунка 74 входит в контакт с клином (кулачком). В таких вариантах осуществления перпендикулярное движение ползунка 74 (относительно направления движения рейки 82) может приводить в действие или отключать переключатель 54, в зависимости от положения переключателя относительно ползунка. Кроме того, в других вариантах осуществления рейка 82 может содержать кулачок, а ползунок 74 может содержать элемент, который приводится в действие кулачком. В таких вариантах осуществления продольное движение рейки может приводить к эксцентрическому движению ползунка 74, которое может приводить в действие или отключать переключатель 54, в зависимости от положения переключателя относительно ползунка.
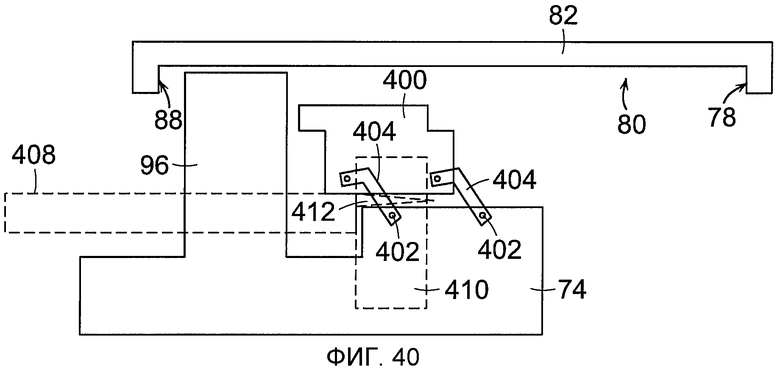
В других вариантах осуществления часть (например, язычок 96) ползунка 74, которая входит в контакт или стыкуется с желобом 80, может быть динамичной, то есть позволяет использовать рейку 82 фиксированной длины в инструментах, в которых режущий рабочий ход концевого зажима 12 является разным для разных процедур. Например, ползунок может иметь множество стыковочных частей (например, язычков), которые используются избирательно в зависимости от ситуации. Такой вариант может быть желательным, например, если концевой зажим 12 позволяет использовать картриджи разной длины, что требует разной длины рабочего хода режущего инструмента в концевом зажиме 12. В других вариантах осуществления может быть предусмотрена замена комбинации вала и концевого зажима под разные требования к длине рабочего хода режущего инструмента в концевом зажиме 12. При более коротком рабочем ходе переключатель направления движения 54 необходимо приводить в действие во время рабочего хода раньше, чем при более длинном рабочем ходе. На фиг. 40 представлена схема такого ползунка 74 в соответствии с различными вариантами осуществления изобретения. На фиг. 40 представлен вид сверху части ползунка 74, на котором показан язычок 96, отходящий кнаружи в желоб 80, который образуется приводным элементом 82. Около язычка 96 есть второй подвижный язычок 400, способный вращаться вокруг одной или нескольких осей вращения 402 на корпусе ползунка 74. Корпус ползунка может соединяться с вторым подвижным язычком 400 с помощью поворотных рычагов 404. Поворотные рычаги 404 могут придавать второму язычку 400 способность поворачиваться в сторону желоба 80 таким образом, чтобы второй язычок 400 выходил в желоб 80. Когда второй язычок 400 повернут таким образом, что он выходит в желоб 80, проксимальное плечо 78 желоба сначала соприкасается со вторым язычком 400, перемещая корпус ползунка 74 в положение, приводящее в действие переключатель, как описано выше, при этом время и пройденное расстояние будет меньше чем при контакте плеча 78 с язычком 96, когда второй язычок 400 не выступает в желоб 80. Таким образом, когда второй язычок 400 выходит в желоб, переключатель 54 приводится в действие в более ранний момент рабочего хода, чем в случае когда второй язычок 400 не выходит в желоб Следовательно, приводной элемент 82 можно использовать при таких процедурах, во время которых требуется меньшая длина рабочего хода, для чего нужно более раннее приведение в действие переключателя направления вращения привода 54.
В различных вариантах осуществления второй язычок 400 может выходить в желоб 80 в результате давления, которое оказывает толкатель 408, входящий в контакт с частью 410 второго язычка 400. Например, как показано на фиг. 40, часть 410 может выступать из второго язычка 400 вниз (по расположению на странице), а толкатель 408 может располагаться ниже (на странице) от корпуса ползунка 74. Если необходима меньшая длина рабочего хода, толкатель 408 можно передвинуть в проксимальную сторону, в результате чего толкатель 408 входит в контакт с выступающей частью 410 второго язычка 400. Таким образом, второй язычок 400 выходит в желоб 400. Толкатель 408 также может иметь клиновидную часть 412, которая вклинивается между корпусом ползунка 74 и вторым язычком 400, в результате чего второй язычок 400 остается повернутым (выступающим), даже когда плечо 78 входит в контакт с язычком 400. Тем не менее толкатель 408 может двигаться вместе с ползунком 74, а ползунок 74 можно переместить в его положение, приводящее в действие переключатель, когда проксимальное плечо 78 желоба 80 входит в контакт со вторым язычком 400. В другом варианте осуществления толкатель 408 можно переместить в сторону приводного элемента 82 (а не в проксимальную сторону), в результате чего второй язычок 400 перемещается в сторону желоба 80.
Толкатель 408 может быть активирован механическим способом (например, рычагом или иным валом, на который нажимает оператор и который позволяет привести в действие толкатель 408), магнитным способом (например, соленоидом), электрическим способом (например, с помощью материалов с памятью формы, которые изменяют форму при нагреве, вызываемом электрическим током) или любым другим подходящим способом.
Кроме того, в различных вариантах осуществления пользователь может изменять функциональность и перемещение ползунка 74, например, для раннего возврата (проксимального движения) рейки 82. Например, инструмент 10 может содержать элемент управления с внешним доступом для изменения функциональности (например, рычаг или переключатель), который, будучи приведен в действие пользователем, вызывает останов привода или изменение направления его вращения независимо от положения ползунка 74. Например, в одном варианте осуществления нажатие на ручной элемент управления с внешним доступом может выводить шестерню 86 из контакта с рейкой 82, в результате чего рейка 82 перестает приводиться в движение шестерней 86. В таком варианте осуществления цепь управления приводом может включать компоненты, которые изменяют направление вращения привода даже если ползунок 74 не находится в своем положении, приводящим в действие переключатель.
Кроме того, в других вариантах осуществления вместо приводного элемента, который движется в продольном направлении (например, рейки 82), в инструменте может быть использован вращающийся приводной элемент, который перемещает ползунок 74 относительно переключателя 54. Например, на фиг. 38 показана схема спирально (то есть вокруг продольной оси) вращающегося приводного элемента 300. Как показано на фиг. 38, в приводном элементе 300 выполнен спиральный желоб 302, имеющий первое плечо 304, которое находится на проксимальной стороне желоба 302, и второе плечо 306, которое находится на дистальной стороне желоба 302. При вращении приводного элемента 300 вперед вокруг продольной оси проксимальное плечо 304 может входить в контакт с ползунком 74 и перемещать его в положение, в котором он будет активировать переключатель. Аналогичным образом, при вращении приводного элемента 300 в обратную сторону вокруг продольной оси дистальное плечо 306 может входить в контакт с ползунком 74 и перемещать его в его положение, не приводящее в действие переключатель. Приводной элемент 300 может приводиться в движение приводом 42 с помощью соответствующей конструкции из зубчатых колес.
В другом варианте осуществления, изображенном на фиг. 39, приводной элемент 320 может иметь круглую или эллиптическую форму, например, форму диска, и может вращаться вокруг вертикальной оси. В таком варианте осуществления на дискообразном приводном элементе 320 может быть предусмотрен периферический желоб 322, частично проходящий по периферии приводного элемента 320. Такой желоб 322 имеет первое плечо 324, которое находится на первой стороне желоба 322, и второе плечо 326, которое находится на второй стороне желоба 322. При вращении приводного элемента 320 против часовой стрелки вокруг вертикальной оси первое плечо 324 может входить в контакт с ползунком 74 и перемещать его в его положение, приводящее в действие переключатель. Аналогичным образом, при вращении приводного элемента 320 по часовой стрелке вокруг вертикальной оси второе плечо 326 может входить в контакт с ползунком 74 и перемещать его в его положение, не приводящее в действие переключатель. Приводной элемент 320 может приводиться в движение приводом 42 через подходящую конструкцию из зубчатых колес. На фиг. 39 желоб 322 представляет собой дугу в 90 градусов. В других вариантах осуществления желоб может представлять собой дугу другого размера.
Описанные в настоящем документе хирургические инструменты могут быть выполнены с возможностью утилизации после использования или могут быть выполнены с возможностью многоразового использования. Однако в обоих случаях после по меньшей мере одного использования устройство после соответствующей обработки и восстановления может использоваться повторно. Процедура восстановления может предусматривать любую комбинацию этапов разборки хирургического инструмента, после которой выполняется очистка и замена некоторых элементов и их последующая сборка. В частности, хирургический инструмент может быть разобран, и любое количество конкретных частей или компонентов устройства может быть избирательно заменено или удалено в любом сочетании. После очистки и (или) замены отдельных частей хирургический инструмент может быть собран заново для последующего использования либо в специализированных организациях, занимающихся таким восстановлением, либо персоналом операционного блока непосредственно перед операцией. Специалистам в данной области будет понятно, что при восстановлении хирургического инструмента можно использовать различные способы разборки, чистки/замены и повторной сборки. Применение таких способов, как и восстановленный в итоге хирургический инструмент, входят в объем настоящего изобретения.
Предпочтительно перед выполнением хирургического вмешательства проводится обработка хирургического инструмента, описанного в настоящем документе. Во-первых, новый или уже использованный инструмент должен быть получен и при необходимости очищен. Затем инструмент может быть стерилизован. В одном способе стерилизации инструмент помещают в закрытый герметичный контейнер, такой как пластиковый пакет или пакет из материала Тайвек (TYVEK). Затем контейнер и инструмент помещаются в поле воздействия излучения, способного проникать в контейнер, такого как гамма-излучение, рентгеновское излучение или электроны высоких энергий. Излучение уничтожает бактерии, находящиеся на поверхности устройства и в контейнере. Стерилизованный таким образом инструмент может храниться в своем стерильном контейнере. Запечатанный контейнер сохраняет инструмент стерильным до его открытия в медицинском учреждении.
В различных вариантах осуществления хирургический инструмент включает: (i) рукоятку, (ii) концевой зажим, соединенный с рукояткой, (iii) электропривод в рукоятке для подачи энергии на концевой зажим, (iv) цепь управления приводом, соединенную с приводом и управляющую его работой, (v) приводной элемент, который приводится в движением приводом, (vi) ползунок. Цепь управления приводом содержит множество переключателей, в том числе первый переключатель с движущимся (например, нажимным) исполнительным элементом (например, поршнем). Приводной элемент, когда он приводится в движение приводом, вызывает движение подвижной части концевого зажима. Такой приводной элемент имеет первое плечо, которое находится в первом положении, и второе плечо, которое находится во втором положении. Ползунок имеет первую и вторую часть. Первая часть стыкуется с приводным элементом таким образом, что ползунок может двигаться в направлении движения приводного элемента, когда либо первое, либо второе плечо рейки входит в контакт с первой частью ползунка. Вторая часть ползунка приводит в действие подвижный исполнительный элемент первого переключателя в момент, когда приводной элемент перемещает ползунок в первое положение относительно первого переключателя. В различных вариантах осуществления цепь управления приводом не содержит интегральной схемы.
В различных вариантах осуществления привод вращает приводной элемент, например, вокруг продольной оси или вокруг вертикальной оси приводного элемента. В других вариантах осуществления привод перемещает приводной элемент в продольном направлении. Например, в таких вариантах осуществления приводной элемент может представлять собой рейку, соединенную зубчатой передачей с шестерней, которую вращает привод, в результате чего вращение привода приводит к продольному перемещению рейки. Рейка, во время продольного перемещения под действием шестерни в первом направлении, перемещает ползунок в первое положение относительно первого переключателя так, что первое плечо входит в контакт с язычком ползунка, ползунок остается в первом положении во время продольного перемещения рейки под действием шестерни во втором направлении, противоположном первому направлению, до тех пор пока второе плечо рейки не войдет в контакт с язычком ползунка, а ползунок выходит из контакта с подвижным исполнительным элементом в тот момент, когда второе плечо рейки переместит ползунок из первого положения относительно первого переключателя во второе положение относительно первого переключателя.
В рукоятке хирургического инструмента также может находиться рама, содержащая стопор. Ползунок может иметь верхнее плечо и нижнее плечо, которые в совокупности образуют U-образный канал. U-образный канал может входить в контакт со стопором при перемещении ползунка в первое положение относительно первого переключателя.
В других обобщенных вариантах осуществления настоящее изобретение относится к устройству, которое приводит в действие переключатель с подвижным исполнительным элементом, при этом указанное устройство включает: (i) движущуюся в продольном направлении рейку, (ii) ползунок, который входит в контакт с рейкой так, что во время продольного перемещения рейки ползунок движется относительно переключателя, в результате чего ползунок приводит в действие подвижный исполнительный элемент переключателя при перемещении ползунка рейкой в первое положение относительно переключателя. В различных вариантах осуществления продольное перемещение рейки может приводить к продольному, перпендикулярному или эксцентрическому перемещению ползунка.
Поскольку в описании настоящего изобретения представлены примеры вариантов осуществления, настоящее изобретение может быть изменено в рамках сущности и объема описания. Настоящая заявка охватывает все возможные вариации, способы применения или изменения изобретения, соответствующие его основным принципам. Кроме того, настоящая заявка охватывает такие отклонения от настоящего описания, которые подпадают под известную или общепринятую практику в области техники, к которой принадлежит настоящее изобретение.


Изобретение относится к медицине. Хирургический инструмент содержит цепь управления приводом, приводной элемент и ползунок. Приводной элемент имеет первое плечо в первом положении и второе плечо во втором положении. Привод имеет узел управления для управления переключателем инструмента. Первая часть ползунка стыкуется с приводным элементом таким образом, что ползунок может двигаться в направлении движения приводного элемента, когда либо первое плечо, либо второе плечо приводного элемента входит в контакт с первой частью ползунка. Вторая часть ползунка приводит в действие переключатель цепи управления приводом, когда приводной элемент перемещает ползунок в первое положение относительно первого переключателя. В результате продольный разрез ткани и установка рядов скоб по обеим сторонам разреза выполняются одновременно. 8 з.п. ф-лы, 40 ил.
1. Хирургический инструмент, содержащий:
рукоятку;
соединенный с рукояткой концевой зажим с подвижным компонентом;
электропривод в рукоятке для подачи энергии на концевой зажим;
цепь управления приводом, подключенную к приводу для управления приводом, при этом цепь управления приводом содержит множество переключателей, и указанное множество переключателей содержит первый переключатель с подвижным исполнительным элементом;
приводной элемент, который приводится в действие приводом, причем приводной элемент вызывает перемещение подвижного компонента в концевом зажиме, когда он приводится в действие приводом, и приводной элемент имеет первое плечо в первом положении и второе плечо во втором положении, при этом приводной элемент движется в результате вращения привода; и
ползунок, включающий:
первую часть, которая стыкуется с приводным элементом так, что приводной элемент может двигать ползунок, когда либо первое, либо второе плечо приводного элемента входит в контакт с первой частью ползунка; и
вторую часть, соединенную с первой частью, которая приводит в действие подвижный исполнительный элемент первого переключателя, когда первое плечо приводного элемента входит в контакт с ползунком и перемещает ползунок из первого положения ползунка во второе положение ползунка относительно первого переключателя,
при этом ползунок остается во втором положении ползунка относительно первого переключателя до тех пор, пока второе плечо приводного элемента не войдет в контакт с первой частью ползунка и не переместит ползунок из второго положения ползунка в первое положение ползунка, и
приводной элемент представляет собой рейку, которую двигает в продольном направлении вращающаяся шестерня, при этом шестерню вращает привод, и ползунок двигается в том же направлении, что и рейка.
2. Хирургический инструмент по п. 1, в котором рейка содержит зубцы, зацепляющие шестерню, при этом рейка имеет первую сторону, которая образует желоб, имеющий первое плечо на первом конце и второе плечо на втором конце.
3. Хирургический инструмент по п. 1, в котором первая часть ползунка содержит язычок, выступающий в желоб, образованный рейкой, так, что ползунок может перемещаться в направлении движения рейки, когда либо первое плечо, либо второе плечо рейки входит в контакт с язычком.
4. Хирургический инструмент по п. 3, в котором:
рейка перемещает ползунок во второе положение ползунка относительно первого переключателя, когда рейка продольно перемещается под действием шестерни в первом направлении, в результате чего первое плечо входит в контакт с язычком ползунка;
ползунок остается во втором положении ползунка относительно первого переключателя, когда рейка продольно перемещается под действием шестерни во втором направлении, противоположном первому направлению, до тех пор, пока второе плечо рейки не войдет в контакт с язычком ползунка; и
ползунок выходит из контакта с подвижным исполнительным элементом, когда второе плечо рейки перемещает ползунок из второго положения ползунка относительно первого переключателя в первое положение ползунка относительно первого переключателя.
5. Хирургический инструмент по п. 4, в котором вторая часть ползунка содержит консольный рычаг, и в котором консольный рычаг входит в контакт с подвижным исполнительным элементом первого переключателя и приводит в действие подвижный исполнительный элемент, когда рейка перемещает ползунок во второе положение ползунка относительно первого переключателя.
6. Хирургический инструмент по п. 5, в котором консольный рычаг отходит от основания ползунка, и консольный рычаг имеет часть с уклоном вниз и часть с уклоном вверх, при этом часть с уклоном вверх соединена с основанием, а часть с уклоном вниз отходит от части с уклоном вверх.
7. Хирургический инструмент по п. 6, в котором:
в рукоятке хирургического инструмента дополнительно имеется рама, при этом рама содержит стопор;
ползунок имеет верхнее плечо и нижнее плечо, в совокупности образующие U-образный канал; и
U-образный канал входит в контакт со стопором, когда ползунок перемещается во второе положение ползунка относительно первого переключателя.
8. Хирургический инструмент по п. 7, в котором:
первый переключатель установлен на печатной плате; и
печатная плата соединена с рамой.
9. Хирургический инструмент по п. 1, в котором первая часть ползунка содержит:
первый фиксированный стыковочный элемент, выступающий в желоб, образованный рейкой, так, что ползунок может перемещаться в направлении движения рейки, когда либо первое плечо, либо второе плечо рейки входит в контакт с первым стыковочным элементом; и
второй подвижный стыковочный элемент, который может избирательно выступать в желоб.
| EP 1990014 A2, 12.11.2008 | |||
| US 5433721 A, 18.07.1995 | |||
| Крановые весы | 1991 |
|
SU1813205A3 |
| Хирургический аппарат для наложения анастомозов между полыми органами | 1974 |
|
SU659146A1 |

