Изобретение относится к электроизмерительной технике и предназначено для использования в системах электроснабжения горных предприятий.
Известны способы идентификации параметров линии электропередачи, основанные на регистрации массивов мгновенных значений токов и напряжений на приемном и передающем концах линии и вычислении по результатам измерений активного и реактивного сопротивлений линии (Файбисович В.А. Определение параметров электрических систем. - М.: Энергоиздат, 1982. - С. 20-29; Бадаев С.С. Способ внутрипериодного измерения комплекса параметров трехфазной сети / Электричество, 2011, №1. - С. 26-31).
Известные способы предусматривают измерение токов и напряжений на передающем и приемном концах линии и организацию передачи данных в пункт контроля, например, на один из концов линии электропередачи.
Следовательно, недостатком известных способов является высокая сложность процедуры идентификации.
Из известных технических решений наиболее близким к предлагаемому по достигаемому результату является способ идентификации параметров линии электропередачи, питающей экскаватор, основанный на регистрации массивов мгновенных значений токов и напряжений на приемном и передающем концах линии и вычислении действующих значений токов и напряжений путем усреднения за период напряжения питающей сети и сдвигов фаз между токами и напряжениями на приемном и передающем концах линии (Хрущев Ю.В., Бацева Н.Л., Абрамочкин Л.В. Идентификация погонных параметров протяженной линии электропередачи с использованием регистраторов аварийных сигналов / Известия Томского политехнического университета. 2011, т. 318, № 4. - С. 118-122).
Известный способ предусматривает измерение токов и напряжений на передающем и приемном концах линии и организацию передачи данных в пункт контроля, например, на один из концов линии электропередачи. В результате этого усложняется техническое решение задачи идентификации.
Следовательно, недостатком известного способа является высокая сложность процедуры идентификации параметров линии электропередачи, питающей экскаватор.
Цель предлагаемого изобретения - упрощение технической реализации процедуры идентификации параметров линии электропередачи, питающей экскаватор.
Поставленная цель достигается тем, что в известном способе идентификации параметров линии электропередачи, питающей экскаватор, основанном на регистрации массивов мгновенных значений токов и напряжений на приемном конце линии и вычислении действующих значений тока и напряжения путем усреднения за период напряжения питающей сети и сдвига фаз между током и напряжением, дополнительно в течение цикла экскавации измеряют напряжение U1 и угол φ1 сдвига фаз между током и напряжением при максимальном значении тока I1 и в режиме потребления, напряжение U2 и угол φ2 сдвига фаз между током и напряжением при максимальном значении тока I2 в режиме рекуперации и напряжение U0 при значении тока I0≈0 при переходе экскаватора из режима потребления в режим рекуперации электрической энергии (или наоборот) и вычисляют активное r и индуктивное х сопротивления линии путем численного решения системы уравнений:

По сравнению с наиболее близким аналогичным техническим решением предлагаемый способ имеет следующие новые признаки:
- в течение цикла экскавации измеряют напряжение U1 и угол φ1 сдвига фаз между током и напряжением при максимальном значении тока I1 и в режиме потребления, напряжение U2 и угол φ2 сдвига фаз между током и напряжением при максимальном значении тока I2 в режиме рекуперации и напряжение U0 при значении тока I0≈0 при переходе экскаватора из режима потребления в режим рекуперации электрической энергии (или наоборот);
- вычисляют активное r и индуктивное х сопротивление сети путем численного решения системы уравнений:
Следовательно, заявляемое техническое решение соответствует требованию «новизна».
По каждому из отличительных признаков проведен поиск известных технических решений в области измерительной техники, электротехники и автоматики.
Операция измерения в течение цикла экскавации напряжения U1 и угла φ1 сдвига фаз между током и напряжением при максимальном значении тока I1 и в режиме потребления, напряжения U2 и угла φ2 сдвига фаз между током и напряжением при максимальном значении тока I2 в режиме рекуперации и напряжения U0 при значении тока I0≈0 при переходе экскаватора из режима потребления в режим рекуперации электрической энергии (или наоборот) в известных способах аналогичного назначения не обнаружена.
Операция вычисления активного r и индуктивного х сопротивлений сети путем численного решения системы уравнений:

в известных способах аналогичного назначения не обнаружена.
Таким образом, указанные признаки обеспечивают заявляемому техническому решению соответствие требованию «существенные отличия».
При реализации предлагаемого технического решения обеспечивается упрощение процедуры идентификация параметров линии электропередачи, питающей экскаватор. Это достигается за счет выполнения измерений токов и напряжений только на приемном конце линии электропередачи в трех режимах: потребления и рекуперации электрической энергии и переходе из одного режима в другой и вычислении на основании измеренных данных активного и индуктивного сопротивлений линии электропередачи.
Следовательно, заявляемое техническое решение соответствует требованию «положительный эффект».
Сущность предлагаемого способа идентификации параметров линии электропередачи, питающей экскаватор, поясняется чертежами.
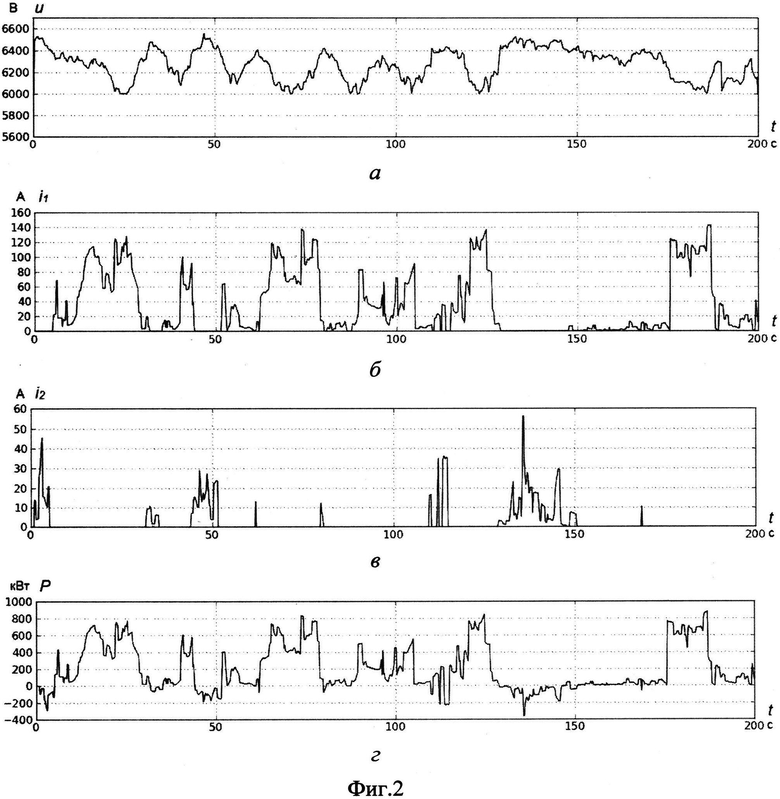
На фиг. 1 приведена функциональная схема системы идентификации параметров линии электропередачи, питающей экскаватор. На чертеже обозначено: 1 - трансформаторная подстанция; 2 - воздушная линия электропередачи; 3 - опоры линии электропередачи; 4 - переключательный пункт; 5 - кабель; 6 - экскаватор; 6 - трансформатор тока; 7 - трансформатор напряжения; 8 - контроллер; 9 - промышленный компьютер (сервер); 10 - монитор; 11 - шина. Электрооборудование и средства обработки данных: трансформатор тока 6, трансформатор напряжения 7, контроллер 8, промышленный компьютер 9, монитор 10 и шина 11, размещены в экскаваторе. На фиг. 2 показаны диаграммы напряжения U (а); потребляемого тока I1 (б), рекуперируемого тока I2 (в) и мощности Р (г) при работе карьерного экскаватора ЭКГ-12А. На фиг. 3 приведены векторные диаграммы токов и напряжений в узле нагрузки в режиме потребления (а) и рекуперации (б) электрической энергии.
Предлагаемый способ идентификации параметров линии электропередачи, питающей экскаватор, основан на анализе токов и напряжений на вводе экскаватора в различных режимах его работы. На горных предприятиях экскаваторы получают питание от консольных передвижных линий. Для нормальной работы электрооборудования экскаватора требуется соответствие параметров линии нормативным значениям. Особенностью работы экскаватора как электроприемника является чередование в цикле экскавации (~30 с) режимов потребления и рекуперации электроэнергии (фиг. 2). Рекуперация происходит при торможении поворотной платформы, опускании ковша, движении привода напора под действием горной породы. При изменении режима работы ток нагрузки практически равен нулю. Следовательно, напряжение на вводе экскаватора равно напряжению в центре питания. Анализ токов и напряжений при двух других режимах - потреблении электроэнергии и ее рекуперации, позволяет определить активное и реактивное сопротивления линии электропередачи.
На основании векторных диаграмм, приведенных на фиг. 3, можно составить уравнения:
- для режима I0≈0:

- для режима потребления электроэнергии:

- для режима рекуперации электроэнергии:

где Ia - активная составляющая тока, Ia=Icosφ;
Ip - реактивная составляющая тока, Ip=Isinφ.
Совместное решение уравнений (2) и (3) с учетом соотношения (1) позволяет получить значения r и х линии электропередачи.
Система, реализующая предлагаемый способ идентификации параметров линии электропередачи, питающей экскаватор, работает следующим образом. Сигналы с датчиков тока 6 и напряжения 7 поступают на входы контроллера 8.
Контроллер 8 выполняет следующие функции:
- аналого-цифровое преобразование сигналов тока и напряжения, поступающих с выходов датчиков соответственно 6 и 7;
- непрерывное измерение угла сдвига фаз между током и напряжением;
- непрерывное вычисление действующих значений тока и напряжения за период питающей сети;
- запоминание массивов действующих значений напряжения и тока и углов сдвига фаз между током и напряжением в течение цикла экскавации;
- определение максимального значения тока I1 в режиме потребления электрической энергии и соответствующих ему значений напряжения U1 и угла φ1 сдвига фаз, запоминание I1, U1 и φ1;
- определение максимального значения тока I2 в режиме потребления электрической энергии и соответствующих ему значений напряжения U2 и угла φ2 сдвига фаз, запоминание значений I2, U2 и φ2;
- определение значения напряжения U0, соответствующего действующему значению тока I0≈0, запоминание значения U0;
- вычисление значений активного r и реактивного х сопротивлений линии электропередачи путем численного решения системы уравнений:

Данные о значениях активного r и реактивного х сопротивления, а также расчетного значения напряжения на передающем конце линии электропередачи E=U0, по шине данных 11 поступают в промышленный компьютер 9 для регистрации, хранения и отображения с помощью монитора 10.
С целью подтверждения положительного эффекта, достигаемого при использовании предлагаемого технического решения, было выполнено компьютерное моделирование системы электропитания экскаватора.
При выполнении вычислительного эксперимента были приняты следующие исходные данные:
- напряжение питающей сети Е=6,3 кВ;
- максимальный ток потребления I1≈70A;
- максимальный ток рекуперации I2≈60А;
- сопротивление линии электропередачи r=5 Ом, х=5 Ом.
В ходе имитационного моделирования, были полученные следующие данные:
- максимальный ток потребления I1=68,47А, при напряжении U1=5 842 В и cos(φ1)=0,905;
- максимальный ток рекуперации I2=57,27 А, при напряжении U2=6686 В и cos(φ1)=0,885;
- напряжение в момент перехода из режима потребления в режим рекуперации Е=U0=6300 В.
Полученные в ходе имитационного моделирования значения были подставлены в систему уравнений (4).

Решение системы уравнений (4) осуществлялось с помощью программного пакета Maple 11, в ходе которого были получены следующие значения активного и реактивного сопротивления: х=5,01 Ом, r=5,01 Ом. Таким образом, погрешность составила 0,2%.
Следовательно, использование в известном способе идентификации параметров линии электропередачи, питающей экскаватор, основанном на регистрации массивов мгновенных значений токов и напряжений на конце линии и вычислении действующих значений тока и напряжения при усреднении за период и сдвига фаз между током и напряжением, дополнительно в течение цикла экскавации операций измерения напряжения U1 и угла φ1, сдвига фаз между током и напряжением при максимальном значении тока I1 в режиме потребления, напряжения U2 и угла φ2 сдвига фаз между током и напряжением при максимальном значении тока I2 в режиме рекуперации и напряжения U0 при значении тока I0≈0 при переходе экскаватора из режима потребления в режим рекуперации электрической энергии (или наоборот) и вычисления активного r и индуктивного х сопротивления линии путем численного решения системы уравнений:

обеспечивает упрощение процедуры идентификации параметров линии электропередачи, питающей экскаватор.
Важным достоинством предлагаемого технического решения является возможность определения параметров линии и напряжения в центре питания по результатам измерений только на приемном конце, т.е. на вводе экскаватора.
Использование предлагаемого способа идентификации параметров линии электропередачи, питающей экскаватор, на горных предприятиях будет способствовать повышению надежности и качества работы добывающих машин и электрооборудования.

Изобретение относится к электроизмерительной технике и предназначено для использования в системах электроснабжения горных машин. Способ идентификации параметров линии электропередачи, питающей экскаватор, основан на регистрации массивов мгновенных значений токов и напряжений на приемном конце линии и вычислении действующих значений тока и напряжения путем усреднения за период напряжения питающей сети и сдвига фаз между током и напряжением. При этом дополнительно в течение цикла экскавации измеряют напряжение U1 и угол φ1 сдвига фаз между током и напряжением при максимальном значении тока I1 и в режиме потребления, напряжение U2 и угол φ2 сдвига фаз между током и напряжением при максимальном значении тока I2 в режиме рекуперации и напряжение U0 при значении тока I0≈0 при переходе экскаватора из режима потребления в режим рекуперации электрической энергии (или наоборот) и вычисляют активное r и индуктивное х сопротивления линии путем численного решения системы уравнений:

Технический результат заключается в упрощении технической реализации процедуры идентификации параметров линии электропередачи, питающей экскаватор. 3 ил.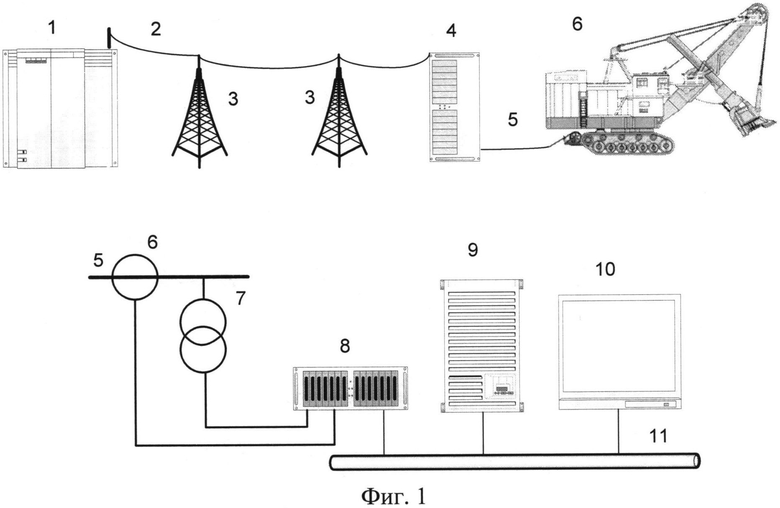
Способ идентификации параметров линии электропередачи, питающей экскаватор, основанный на регистрации массивов мгновенных значений токов и напряжений на приемном конце линии и вычислении действующих значений тока и напряжения путем усреднения за период напряжения питающей сети и сдвига фаз между током и напряжением, отличающийся тем, что дополнительно в течение цикла экскавации измеряют напряжение U1 и угол φ1 сдвига фаз между током и напряжением при максимальном значении тока I1 и в режиме потребления, напряжение U2 и угол φ2 сдвига фаз между током и напряжением при максимальном значении тока I2 в режиме рекуперации и напряжение U0 при значении тока I0≈0 при переходе экскаватора из режима потребления в режим рекуперации электрической энергии (или наоборот) и вычисляют активное r и индуктивное х сопротивления линии путем численного решения системы уравнений:
| СИСТЕМА ТЯГОВОГО ЭЛЕКТРОСНАБЖЕНИЯ ПОСТОЯННОГО ТОКА | 1990 |
|
RU2009053C1 |
| УСТРОЙСТВО для ПЛАВНОГО АВТОМАТИЧЕСКОГО | 0 |
|
SU253110A1 |
| Способ изготовления катода электронной лампы | 1931 |
|
SU28976A1 |
| WO 2012118589 A1 07.09.2012 | |||
| WO 2010011484 A1 28.01.2010 | |||

