Изобретение относится к определению океанографических характеристик и построению их пространственного распределения и может быть использовано для географических и природоресурсных исследований океанов и морей.
Известен способ определения океанографических характеристик и устройство для его реализации, основанные на использовании набора измерительных датчиков, которые с помощью самолета или судна погружают в воду, зондируют ими водную толщу до дна, измеряя при этом океанографические характеристики. Результаты измерения записывают и хранят в устройстве памяти, а затем, когда датчики находятся на поверхности, по команде в определенный момент времени передают их на искусственный спутник Земли или другое приемное устройство (патент US №5209112 [1]).
Недостатком известного способа и устройства для его реализации [1] является низкая информативность измерений, обусловленная невозможностью измерения параметров светового поля над морской поверхностью, в части регистрации спектров выходящего из моря солнечного излучения, несущих информацию о концентрации в морской воде взвешенного минерального и органического, а также растворенного органического веществ, но которые регистрируются спутниковой аппаратурой. Также известные способ и устройство не позволяют достичь относительно высокой точности корректировки спутниковых данных из-за недостаточного объема информации.
Известен также способ определения и построения пространственного распределения океанографических характеристик и система для его реализации, основанные на комплексных подспутниковых (судовых) и спутниковых измерениях океанографических характеристик с помощью измерительных датчиков и комплексных измерительных устройств, при этом с помощью измерительных датчиков и комплексных измерительных устройств, установленных на судне, измеряют океанографические характеристики, а именно гидрофизические характеристики морской воды и ее поверхности, метеорологические характеристики и параметры светового поля над морской поверхностью с помощью измерительных датчиков и комплексных измерительных устройств, установленных на искусственных спутниках Земли, зондируют водную поверхность и принимают данные дистанционного зондирования водной поверхности, данные подспутниковых и спутниковых измерений сохраняют в устройстве памяти, по показаниям упомянутых измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственное распределение океанографических характеристик, исследуемых акваторий (Дистанционное зондирование моря с учетом атмосферы./ Под ред. В.А. Урденко и Г. Циммермана. Сб. статей, Выпуск института Космических исследований АН ГДР, Москва-Берлин-Севастополь, 1985 г., стр. 6-19 [2]).
Недостатками известного способа и системы для его реализации [2] являются низкая информативность измерений и точность корректировки спутниковых данных за счет недостаточной синхронности подспутниковых (судовых) и спутниковых измерений, что приводит к необходимости пространственно-временного усреднения измеряемых океанографических характеристик, а также высокая стоимость описанных способа и системы. Недостаточная синхронность подспутниковых (судовых) и спутниковых измерений и низкая точность определения океанографических характеристик с использованием описанного выше способа обусловлена тем, что измерения выполняют на стоянках (на станциях) судна путем зондирования измерительными датчиками и комплексными измерительными устройствами водной толщи или путем их буксировки на ходу судна, при этом в последнем случае измерения в поверхностных слоях воды производят в возмущенной корпусом движущегося судна водной среде, что вносит значительную погрешность в определение реальных значений гидрофизических и других океанологических характеристик.
Высокая стоимость описанного выше способа и системы для ее реализации обусловлена тем, что для проведения подспутниковых измерений используют научно-исследовательское судно, имеющее водоизмещение от 800-1000 и более тонн и оснащенное дорогостоящей научной аппаратурой и оборудованием. На эксплуатацию такого судна тратятся большие финансовые средства. Кроме того, для эксплуатации и обслуживания сложной научной аппаратуры и оборудования, а также для научного руководства экспериментальными работами в море привлекается большое число высококвалифицированных специалистов, которые относительно длительное время проводят в море и в связи с этим на их содержание тратятся также большие денежные средства.
Известно также техническое решение, технический результат которого заключается в повышении информативности измерений и точности определения и построения пространственного распределения океанографических характеристик (океанографических полей) исследуемых акваторий, а также в снижении стоимости способа и системы для его реализации (патент RU №2156958 С1, 27.09.2000 [3]).
Известный способ определения и построения пространственного распределения океанографических характеристик [3], заключается в том, что с помощью измерительных датчиков и комплексных измерительных устройств производят комплексные подспутниковые (судовые) и спутниковые измерения океанографических характеристик, при этом результаты подспутниковых и спутниковых измерений сохраняют в устройстве памяти и по показаниям упомянутых измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственные распределения океанографических характеристик исследуемых акваторий, при этом первый набор измерительных датчиков и комплексных измерительных устройств погружают в воду, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна, расположенной над водой, третий набор измерительных датчиков и комплексных измерительных устройств размещают на борту судна, в режиме реального времени считывают и записывают показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, в устройство считывания первичных данных, в котором показания упомянутых измерительных датчиков и комплексных измерительных устройств в процессе непрерывных измерений периодически обновляют, с искусственного спутника Земли принимают данные дистанционного зондирования водной поверхности Земли, считывают координаты судна из устройства определения координат судна, из устройства определения координат луча сканирования водной поверхности искусственным спутником Земли считывают координаты луча сканирования водной поверхности, сравнивают их с упомянутыми координатами судна и в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств упомянутого искусственного спутника Земли и устройства определения координат судна из упомянутого устройства считывания первичных данных считывают в упомянутое устройство памяти и запоминают соответствующие упомянутым координатам показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, и соответствующие значения упомянутых координат регистрируют данные дистанционного зондирования водной поверхности искусственным спутником Земли, определяют градуировочные коэффициенты и по упомянутым показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов датчиков и комплексных измерительных устройств, полученным при совпадении координат судна и координат луча сканирования водной поверхности Земли, корректируют упомянутую спутниковую информацию.
При этом первый набор измерительных датчиков и комплексных измерительных устройств крепят жестко с помощью электромагнитного устройства или постоянного магнита к носовой части судна ниже его ватерлинии, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна над водой таким образом, чтобы в поле зрения упомянутого второго набора измерительных датчиков и комплексных измерительных устройств не попадало отраженное от морской поверхности рассеянное бортом носовой части судна солнечное излучение. Первым, вторым и третьим наборами измерительных датчиков и комплексных измерительных устройств измерения выполняют на ходу судна в невозмущенной водной среде. Первым набором измерительных датчиков и комплексных измерительных устройств контактно измеряют изменение скорости воды и вибрацию судна, температуру, электропроводность и давление воды, концентрацию кислорода и показатель рассеяния света в воде. Вторым набором измерительных датчиков и комплексных измерительных устройств измеряют контактно температуру, влажность и давление атмосферного воздуха, направление и скорость приводного ветра, дистанционно в забортной морской воде флюоресценцию хлорофилла фитопланктона и растворенного (желтого) органического вещества, дистанционно - радиационную температуру морской поверхности, спектральные яркость неба, яркость моря и облученность морской поверхности солнечным излучением. Третьим набором датчиков и комплексных измерительных устройств измеряют в проточной забортной морской воде спектральный показатель ослабления света, флюоресценцию хлорофилла и растворенного (желтого) органического вещества, концентрацию хлорофилла, каротиноидов, феофитина, углерода, при этом в третий набор измерительных датчиков и комплексных измерительных устройств забортную морскую воду подают по водопроводу автоматически на ходу судна из устройства забора забортной воды, размещенного в первом наборе измерительных датчиков и комплексных измерительных устройств.
А система определения и построения пространственного распределения океанографических характеристик, включает измерительные датчики и комплексные измерительные устройства, устройство приема спутниковых данных и устройство памяти, дополнительно введены устройство считывания первичных данных, устройство управления, устройство определения координат луча сканирования водной поверхности Земли искусственным спутником Земли и устройство определения координат судна, устройство хранения спутниковых данных и устройство корректировки спутниковых данных и хранения океанографических характеристик, при этом первый набор измерительных датчиков и комплексных измерительных устройств закреплен на носовой части судна, находящейся под водой, второй и третий наборы измерительных датчиков и комплексных измерительных устройств размещены соответственно на носовой части судна, расположенной над водой, и борту упомянутого судна, упомянутые первый, второй и третий наборы измерительных датчиков и комплексных измерительных устройств соединены с упомянутым устройством считывания первичных данных, которое соединено с упомянутым устройством управления и с упомянутым устройством памяти, при этом упомянутое устройство управления соединено с упомянутым устройством определения координат судна и с упомянутым устройством определения координат луча сканирования водной поверхности Земли искусственным спутником Земли, которое соединено с упомянутым устройством приема спутниковой информации, соединенным с устройством хранения спутниковой информации, в свою очередь соединенным с упомянутым устройством коррекции спутниковой информации и хранения океанографических данных, которое соединено с упомянутым устройством памяти. При этом первый набор измерительных датчиков и комплексных измерительных устройств содержит устройство забора забортной морской воды, соединенное водопроводом с третьим набором измерительных датчиков и комплексных измерительных устройств, трехкоординатный измеритель изменения скорости воды и вибрации судна и измерительные датчики: температуры, электропроводности и давления морской воды, показателя рассеяния света в воде и концентрации в ней кислорода. Все упомянутые измерительные датчики и комплексные измерительные устройства размещены в герметичном контейнере, который жестко прикреплен к носу судна ниже его ватерлинии с помощью электромагнита (или постоянного магнита) и к которому прикреплен страховочный трос, второй конец которого закреплен на борту судна, и соединен с устройством считывания первичных данных многожильным герметичным электрическим кабелем. Второй набор измерительных датчиков и комплексных измерительных устройств содержит измерительные датчики температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измеритель флюоресценции фитопланктона и растворенного (желтого) органического вещества, измеритель радиационной температуры морской поверхности (радиометр) и измеритель спектральных яркости неба, яркости моря и облученности морской поверхности солнечным излучением. Все упомянутые измерительные датчики и комплексные измерительные устройства, входящие в состав второго набора, расположены на носовой части судна над водой таким образом, чтобы в поле зрения измерителя спектральной яркости моря не попадало отраженное от морской поверхности рассеянное бортом носовой части судна солнечное излучение, и соединены с помощью электрического кабеля с устройством считывания первичных данных. Третий набор измерительных датчиков и комплексных измерительных устройств содержит измеритель спектрального показателя ослабления света морской воды, измеритель флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла, каротиноидов, феофитина, растворенного (желтого) органического вещества, углерода. Все упомянутые датчики и комплексные измерительные устройства, входящие в состав третьего _ набора, расположены на борту судна (в судовой лаборатории) и соединены с помощью электрического кабеля с устройством считывания первичных данных, а с помощью водопровода - с устройством забора забортной морской воды.
Повышение информативности измерений и точности определения и построения пространственного распределения океанографических характеристик исследуемых акваторий в известном изобретении [3] достигается за счет осуществления автоматизированных синхронных измерений в реальном времени с помощью трех наборов измерительных датчиков и комплексных измерительных устройств, установленных на судне, и измерительных датчиков и комплексных измерительных устройств, расположенных на искусственном спутнике Земли, и за счет запоминания результатов измерений в моменты совпадения координат судна и координат луча сканирования поверхности океана измерительными датчиками искусственного спутника Земли, при этом предлагаемое устройство позволяет проводить измерения гидрофизических и других океанологических характеристик в невозмущенной корпусом движущегося судна водной среде и над невозмущенной корпусом судна водной поверхностью.
Недостатками известного способа определения и построения пространственного распределения океанографических характеристик является то, что измерительные датчики связаны с судном (первый набор измерительных датчиков и комплексных измерительных устройств прикреплен к носовой части судна ниже его ватерлинии), которое подвержено возмущающим факторам метеорологического и гидрологического происхождения, а следовательно и на измерительные датчики будут воздействовать те же возмущающие факторы, что и на судно, т.е. имеет место невысокая достоверность результатов измерений.
Кроме того, известный способ определения и построения пространственного распределения океанографических характеристик обеспечивает локальные измерения, что обусловлено налагаемыми ограничениями при выполнении измерений, например, на скорость движения судна и на мореходность, т.е. для получения необходимых массивов измерений по большим площадям потребуется проведение длительных измерений.
Также из описания изобретения непонятно, на каком принципе работает «трехкоординатный измеритель изменения скорости воды и вибрации судна», что ставит под сомнение промышленную реализацию известного способа определения и построения пространственного распределения океанографических характеристик
Задачей предлагаемого технического решения является повышение достоверности определения и построения пространственного распределения океанографических характеристик.
Поставленная задача решается за счет того, что в способе определения и построения пространственного распределения океанографических характеристик, заключающимся в том, что с помощью измерительных датчиков и комплексных измерительных устройств производят комплексные подспутниковые (судовые) и спутниковые измерения океанографических характеристик, при этом результаты подспутниковых и спутниковых измерений сохраняют в устройстве памяти и по показаниям упомянутых измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственные распределения океанографических характеристик исследуемых акваторий, первый набор измерительных датчиков и комплексных измерительных устройств погружают в воду, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна, расположенной над водой, третий набор измерительных датчиков и комплексных измерительных устройств размещают на борту судна, в режиме реального времени считывают и записывают показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, в устройство считывания первичных данных, в котором показания упомянутых измерительных датчиков и комплексных измерительных устройств в процессе непрерывных измерений периодически обновляются, с искусственного спутника Земли принимают данные дистанционного зондирования водной поверхности, считывают координаты судна из устройства определения координат судна, из устройства определения координат луча сканирования водной поверхности искусственным спутником Земли считывают координаты луча сканирования водной поверхности, сравнивают их с упомянутыми координатами судна и в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств упомянутого искусственного спутника Земли и устройства определения координат судна из упомянутого устройства считывания первичных данных считывают в упомянутое устройство памяти и запоминают соответствующие упомянутым координатам показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, и соответствующие значения упомянутых координат, регистрируют данные дистанционного зондирования водной поверхности искусственным спутником Земли, определяют градуировочные коэффициенты и по упомянутым показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов датчиков и комплексных измерительных устройств, полученным при совпадении координат судна и координат луча сканирования водной поверхности, корректируют упомянутую спутниковую информацию, в отличие от прототипа в спутниковые измерения океанографических характеристик дополнительно включают топографическую съемку прибрежной территории, посредством лазера в красном диапазоне, измерения глубины акватории, посредством лазера зеленого диапазона, первым набором измерительных датчиков и комплексных измерительных устройств выполняют акустическое зондирование морского дна, определяют высоту, период, мощность и крутизну поверхностных волн, посредством датчика давления, дополнительно введен еще один набор измерительных датчиков и комплексных измерительных устройств, размещенных на носителе, выполненным в виде зонда сочлененного с якорно-буйрепным устройством, размещенным в кормовой части судна, а в системе определения и построения пространственного распределения океанографических характеристик, которая включает наборы измерительных датчиков и комплексных измерительных устройств, устройство приема спутниковых данных и устройство памяти, устройство считывания первичных данных, устройство управления, устройство определения координат луча сканирования водной поверхности Земли измерительными датчиками и комплексными измерительными устройствами искусственного спутника Земли и устройство определения координат судна, устройство хранения спутниковых данных и устройство корректировки спутниковых данных и хранения океанографических характеристик, при этом первый набор измерительных датчиков и комплексных измерительных устройств закреплен на носовой части судна, находящейся под водой, второй и третий наборы измерительных датчиков и комплексных измерительных устройств размещены соответственно на носовой части судна, расположенной над водой, и борту упомянутого судна, первый, второй и третий наборы измерительных датчиков и комплексных измерительных устройств соединены с устройством считывания первичных данных, которое соединено с упомянутыми устройством управления и устройством памяти, при этом устройство управления соединено с устройством определения координат судна и с устройством определения координат луча сканирования водной поверхности Земли измерительными датчиками и комплексными измерительными устройствами искусственного спутника Земли, которое соединено с устройством приема спутниковой информации, соединенным с устройством хранения спутниковой информации, в свою очередь, соединенным с устройством коррекции спутниковой информации и хранения океанографических данных, которое соединено с упомянутым устройством памяти, при этом первый набор измерительных датчиков и комплексных измерительных устройств состоит из датчиков температуры, электропроводности и давления морской воды, концентрации кислорода, показателя рассеяния света в воде и устройства забора забортной морской воды, второй набор измерительных датчиков и комплексных измерительных устройств состоит из датчиков температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измерителя флюоресценции фитопланктона и растворенного (желтого) органического вещества, измерителя (радиометра) радиационной температуры морской поверхности и измерителя спектральных яркости неба, яркости моря и облученности морской поверхности солнечным излучением, третий набор измерительных датчиков и комплексных измерительных устройств состоит из измерителя спектрального показателя ослабления света морской воды, измерителя флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измерителя концентрации хлорофилла и растворенного (желтого) органического вещества, измерителя концентрации хлорофилла, каротиноидов, феофитина, растворенного (желтого) органического вещества, углерода, в отличие от прототипа аппаратура спутниковых измерений дополнительно содержит лидар, содержащий лазер красного и зеленого диапазонов, первый набор измерительных датчиков и комплексных измерительных устройств дополнительно содержит многолучевой эхолот, гидролокатор бокового обзора, дополнительно введен еще один набор измерительных датчиков и комплексных измерительных устройств, состоящих из измерителей вертикальных профилей растворенного метана, содержания нитратов альфа-, бета- и гамма-радиоактивности, зональной и меридиональной компонент скорости течения, скорости звука в морской воде, который размещен на носителе, выполненным в виде зонда сочлененного с якорно-буйрепным устройством, размещенным в кормовой части судна.
Заявляемое изобретение поясняется чертежом, на котором приведена функциональная схема заявляемой системы.
Система определения и построения пространственного распределения океанографических характеристик состоит из первого набора измерительных датчиков и комплексных измерительных устройств 1, второго набора измерительных датчиков и комплексных измерительных устройств 2, третьего набора измерительных датчиков и комплексных измерительных устройств 3, устройства считывания первичных данных 4, устройства управления 5, устройства определения координат судна 6, устройства приема спутниковой информации 7, устройства определения координат луча сканирования водной поверхности искусственным спутником Земли 8, устройства хранения спутниковой информации 9, устройства памяти 10, устройства корректировки спутниковой информации и хранения океанографических полей 11. В состав первого набора измерительных датчиков и комплексных измерительных устройств 1 входят трехкоординатный измеритель изменения скорости воды и вибрации судна, датчики температуры, электропроводности и давления морской воды, концентрации кислорода и показателя рассеяния света в воде и устройство забора забортной морской воды 12. Все измерительные датчики и комплексные измерительные устройства, входящие в состав первого набора 1, и устройство забора забортной морской воды 12 размещены в контейнере, который жестко прикреплен к носовой части судна ниже его ватерлинии с помощью электромагнита (или постоянного магнита), и для повышения надежности его крепления используется страховочный трос, который одним своим концом прикреплен к контейнеру, содержащему набор 1, а вторым концом закреплен на борту судна. Все измерительные датчики и комплексные измерительные устройства, входящие в состав первого набора 1, соединены с устройством считывания первичных данных 4 многожильным герметичным электрическим кабелем 13. Устройство забора забортной морской воды 12 соединено с третьим набором измерительных датчиков и комплексных измерительных устройств 3 с помощью водопровода 14. При этом контейнер с первым набором измерительных датчиков и комплексных измерительных устройств 1 и устройством забора забортной морской воды 12 прикреплен к носовой части судна так, что упомянутые измерительные датчики и устройство забора забортной морской воды 12 находятся в невозмущенной корпусом движущегося судна водной среде, а входное отверстие устройства забора забортной морской воды 12 направлено в сторону движения судна (по ходу судна).
В состав второго набора измерительных датчиков и комплексных измерительных устройств 2 входят датчики температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измеритель флюоресценции фитопланктона и растворенного (желтого) органического вещества, измеритель радиационной температуры морской поверхности (радиометр) и измеритель спектральных яркости неба, яркости моря и облученности морской поверхности солнечным излучением. Второй набор измерительных датчиков и комплексных измерительных устройств 2 размещен на носовой части судна, расположенной над водой таким образом, чтобы в поле зрения измерителя спектральной яркости моря не попадало отраженное от морской поверхности рассеянное бортом носовой части судна солнечное излучение. Каждый из датчиков, входящих в состав второго набора измерительных датчиков и комплексных измерительных устройств 2, соединен с помощью электрического многожильного кабеля 15 с устройством считывания первичных данных 4.
В состав третьего набора измерительных датчиков и комплексных измерительных устройств 3 входят измеритель спектрального показателя ослабления света морской воды, измеритель флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла, каротиноидов, феофитина, растворенного (желтого) органического вещества, углерода. Третий набор измерительных датчиков и комплексных измерительных устройств 3 размещен на борту судна в судовой лаборатории. Каждый из датчиков и комплексных измерительных устройств, входящих в третий набор 3, соединен с помощью электрического многожильного кабеля 16 с устройством считывания первичных данных 4.
Устройство считывания первичных данных 4 соединено с устройством управления 5. Устройства управления 5 соединено с устройством определения координат судна 6, например навигационным прибором "GPS" и с устройством определения координат луча сканирования водной поверхности искусственным спутником Земли 8. Устройство определения координат луча сканирования водной поверхности искусственным спутником Земли 8 соединено с устройством приема спутниковой информации 7, которое соединено с устройством хранения спутниковой информации 9, соединенным с устройством корректировки спутниковой информации и хранения океанографических полей 11. Устройство корректировки спутниковой информации и хранения океанографических полей 11 соединено с устройством памяти 10, соединенным с устройством считывания первичных данных 4. Система определения и построения пространственного распределения океанографических характеристик также содержит еще один набор 17 измерительных датчиков и комплексных измерительных устройств, состоящих из измерителей вертикальных профилей растворенного метана, содержания нитратов альфа-, бета- и гамма-радиоактивности, зональной и меридиональной компонент скорости течения, скорости звука в морской воде, который размещен на носителе 18, выполненном в виде зонда, сочлененного с якорно-буйрепным устройством 19, размещенным в кормовой части судна. Носитель 18 и устройство считывания первичных данных 4 соединены посредством бортовой аппаратуры 20. Канал связи между носителем (зондом) 18 и бортовой аппаратурой выполнен на индуктивных модемах. Индуктивные модемы типа SBE-44 установлены на судне и зонде и служат для передачи данных измерений и телеметрической информации. Индуктивный модем представляет собой катушку индуктивности с изолированными электрическими выводами, помещенную в корпус из диэлектрика, залитого компаундом, и электронной платы управления. В сборке индуктор и ферритовое кольцо устанавливается на буйреп так, чтобы стальной несущий трос в полихлорвиниловой оболочке свободно проходил через центр катушки. Буйреп представляет собой многожильный нержавеющий несущий трос в диэлектрической оболочке, изолирующей от воды. По индуктивному каналу выполняется передача данных от зонда к судну. Таким образом, система подводной связи обеспечивает бесконтактный обмен информацией между зондом и судном.
Якорно-буйрепное устройство 19 обеспечивают фиксацию зонда 18 на заданных глубинах, а также на морском дне. Аппаратура спутниковых измерений дополнительно содержит лидар, содержащий лазер красного и зеленого диапазонов, представляющий собой батиметрическую систему. Принцип действия батиметрической системы установленной на воздушном носителе основан на измерении интервала времени между моментом отражения лазерного импульса от поверхности воды и от дна водоема. Использование лазера зеленого и красного диапазонов позволяет одновременно измерять глубины на акватории и выполнять топографическую съемку прибрежной территории.
Лидар позволяет выполнить съемку рельефа дна в труднодоступных местах (от уреза воды до глубины 1,5-2,0 м).
Однако, несмотря на высокую производительность и возможность измерять глубины на величину превышающую три естественных прозрачностей воды, лидар имеет существенный недостаток - это низкая разрешающая способность. Он не в состоянии обнаружить объект размером менее чем 2×2 м, что делает его применение на акваториях где необходимо выполнение съемки рельефа дна в соответствии с требованиями «особого» класса съемки невозможным.
Первый набор измерительных датчиков и комплексных измерительных устройств дополнительно содержит многолучевой эхолот и гидролокатор бокового обзора.
Многолучевой эхолот (МЛЭ) формирует лучи по фиксированным направлениям в плоскости, перпендикулярной диаметральной плоскости судна, по которым ведется прием гидроакустических сигналов. Прием отраженного сигнала производится по множеству отдельных направлений, которые называются лучами.
Угловое расстояние между крайними лучами определяет ширину полосы обзора для заданной глубины моря (от 70% от глубины до 3-х и более глубин). По результатам полученных батиметрических данных создается цифровая модель рельефа дна. Полученная модель очень информативна и может применяться для решения самых различных задач.
Но, при использовании МЛЭ необходимо учитывать их ограниченную возможность по обнаружению подводных объектов. Лучи излучаемые МЛЭ расположены веерообразно. Между проекцией лучей на дне существуют пропуски. Ширина пропусков зависит от количества лучей в посылке, от глубины.
Размеры пропусков увеличиваются по мере увеличения глубины. В процессе камеральной обработки материалов работы МЛЭ, пропуски между лучами заполняются. Заполнение проводится по математическому алгоритму, который в упрощенном виде сводится к осреднению значений соседних лучей.
Величина образующихся на профиле промежутков между измеряемыми по наклонным лучам глубинами может превышать десятки метров, что свидетельствует об ограниченных возможностях решения задачи обнаружения объектов МЛЭ. В случае попадания какого-либо подводного предмета в пропуск между лучами МЛЭ, он не будет зафиксирован в итоговых материалах. В конкретной реализации применен высокочастотный многолучевой эхолот типа ЕМ 100.
Для обнаружения подводных объектов состав измерительных средств введен гидролокатор бокового обзора типа СН-300, который представляет собой гидролокатор шагового поиска и может исследовать подводное пространство в горизонтальном и вертикальном направлениях.
В систему определения и построения пространственного распределения океанографических характеристик дополнительно введен еще один набор измерительных датчиков и комплексных измерительных устройств, состоящих из измерителей вертикальных профилей растворенного метана, содержания нитратов альфа-, бета- и гамма-радиоактивности, зональной и меридиональной компонент скорости течения, скорости звука в морской воде, который размещен на носителе, выполненным в виде зонда сочлененного с якорно-буйрепным устройством, размещенным в кормовой части судна.
Носитель 18 представляет собой зонд многоразового использования и предназначен для измерения на ходу судна (до 15уз) гидрофизических параметров: температуры (от -2 до 30 град. С, скорости звука (от 1410 до 1560 м/с с предельной погрешностью ±0,3 м/с) и гидростатического давления (от 0 до 5 МПа) с последующим пересчетом в глубину. Измерение гидрофизических параметров производится с дискретностью по глубине 2 м до глубины 200 м и 5 м на глубинах более 200 м.
Зонд 18 (носитель) соединен с бортовой аппаратурой 20 для приема измерительной информации, ее обработки, регистрации, архивирования и выдачи внешним потребителям. Установка зонда 18 на заданную глубину осуществляется посредством тросовой лебедки, выполненной на принципе безинерционной катушки для обеспечения беспрепятственного погружения зонда 18 на ходу судна на заранее заданную глубину погружения (или при нахождении судна в дрейфе на морское дно). Тросовая лебедка устанавливается в кормовой части судна.
Бортовая аппаратура 20 создана на основе ЭВМ и предназначена для приема измерительной информации, вычисления глубины погружения зонда по измеренному гидростатическому давлению, аппроксимации вертикальных распределений параметров, отображение в графическом и табличном виде обработанной измерительной информации, ее архивацию и выдачу внешним потребителям по стандартным интерфейсам.
В качестве датчика давления применен датчик давления типа DRUCK РМР 4010.
В качестве датчиков измерения температуры, электропроводности и давления, акустического доплеровского измерителя течения, могут быть использованы датчики, например, акустический трехкомпонентный измеритель течений типа 3D-ACM модель 3ACM-CBP-S и измеритель электропроводности с датчиком температуры, выполненный на основе измерителя скорости течения типа CTS-C-1ED или доплеровский измеритель течения Nortek Aquadopp 3D.
Акустический доплеровский измеритель профиля течений измеряет три компоненты скорости течения на одном горизонте и включает в себя трехкомпонентный магнитный компас для измерения магнитного поля Земли в трех проекциях, двухосевой электролитический инклинометр для измерения отклонения от вертикали, твердотельный датчик температуры. Принцип измерения скорости течения основан на измерении разности времен пролета акустического импульса в прямом и обратном направлении («времяпролетный» измеритель). Он может быть также оснащен датчиком давления для измерения глубины погружения зонда 18. Он также имеет интерфейс для подключения датчика солености и температуры и два входных канала постоянного тока для подключения внешних датчиков. Результаты измерений передаются в реальном времени в формате ASCII по последовательному интерфейсу RS-232 или RS-485 при скорости 19200 бит/сек, либо записываются в стандартное статическое ОЗУ размером 0,5 МБ, питаемое литиевой батареей, для последующего считывания.
Программное обеспечение (программа 3DACM97) позволяет конфигурировать и настраивать датчик с использованием стандартного пользовательского интерфейса Windows. Данные могут передаваться в режиме реального времени или считываться из внутренней памяти прибора. Данные, передаваемые в режиме реального времени, могут быть представлены в графическом виде на экране дисплея. Программное обеспечение в режиме реального времени принимает и сохраняет данные о векторе скорости, данные с трехкомпонентного компаса, инклинометра, данные с дополнительных датчиков, включая датчик солености, температуры, давления.
Данные о векторе скорости усредняются с помощью алгоритма векторного осреднения по временному интервалу от 15 секунд до 60 минут. Программа ACMPost позволяет графически отображать прочитанные данные на дисплее и сохранять данные по измерениям солености, температуры, давления в файле стандарта DAT С00 и HDR. Эти форматы также могут читаться программой ACMPost.
Электронный интерфейс обеспечивает выход напряжения постоянного тока пропорционально электропроводности и температуре. Управление выходом напряжения достигается посредством двух управляемых пользователем логических линий. Датчики электропроводности основаны на датчике электропроводности с индуктивной связью.
Индуктивные датчики демонстрируют естественную устойчивость, в отличие от датчиков, основанных на незащищенных электродах, при изменении их геометрии, которая вызывается биообрастанием. Большой внутренний диаметр датчика электропроводности устраняет необходимость в насосе или других искусственных средствах проведения потока воды через датчик. Использование высококачественного платинового термометра сопротивления приводит к линейным измерениям температуры, характеризуемым высокой стабильностью. Электронный сигнал очень линеен, что устраняет необходимость использования комплексных уравнений для преобразования выходных сигналов в физические величины.
Коммуникационный протокол модуля включает в себя развитую систему команд, позволяющую организовать работу с модулем наиболее удобным для пользователя образом.
Модуль может работать в одном из четырех режимов:
- режим RUN MODE (normal).
В этом режиме модуль осуществляет измерения всех параметров:
- режим RUN MODE (fast pressure).
В этом режиме измерения осуществляются только для датчика давления и передается значение только величины давления.
Режимы OPEN MODE (изменение констант калибровки) и CAL MODE (проведение калибровки) являются вспомогательными и используются при проведении метрологического обслуживания прибора. Измеренные величины автоматически пересчитываются в физические значения и в таком виде (в ASCII-кодах) передаются пользователю, а также записываются в память, откуда могут быть считаны позднее в произвольный момент времени.
Датчик растворенного в воде кислорода представляет собой датчик типа (AANDERAA Oxygen Optode 4330F).
Датчик содержания углеводородов представляет собой датчик типа METS ("CAPSUM"), который позволяют измерять концентрацию метана в водной толще. Датчик представляет собой полупроводниковый прибор, принцип работы которого заключается в том, что диффузия молекул углеводородов из воды через специальную силиконовую мембрану транслируется в камеру датчика. Адсорбция молекул углеводов на активном слое датчика приводит к электронному обмену с молекулами кислорода, таким образом, меняя сопротивление активного слоя, которое преобразуется в выходное (измеряемое) напряжение.
Основные характеристики датчика: 10 мкм силиконовая мембрана; рабочая глубина 0-3500 м; рабочая температура 2-20 град. C; время измерения от 1 до 3 сек; время стабилизации диффузии - до 5 минут, в зависимости от турбулентности; входное напряжение 9-36 В; расход энергии 160 мА/ч; выходной сигнал - аналоговый 0-5 В и цифровой RS-485; метан 50 нмоль/л - 10 мкмоль/л.
Датчик содержания углекислого газа предназначен для измерения спектров комбинационного рассеяния оптического излучения в составе заякоренной профилирующей подводной обсерватории посредством спектроанализатора. По спектрам комбинационного рассеивания получают информацию о составе морской воды. Основные технические характеристики спектроанализатора: спектральный диапазон 0,52-0,78 мкм, полоса пропускания 0,54 нм на 0,783 мкм, точность позиционирования по спектру 0,2 нм, число спектральных каналов 4096.
Датчики содержания альфа-, бета- и гамма-радиоактивности объединены в блок, который также содержит модуль контроля радиационного загрязнения, который предназначен для определения in situ содержания гамма-излучающих радионуклидов (как техногенного, так и естественного происхождения) в морской воде.
Основные технические характеристики модуля контроля радиационного загрязнения: диапазон регистрируемых энергий 0,2-3,0 мэВ, энергетическое разрешение по линии цезия 137 13%, число уровней квантования спектра 256, максимальное число отсчетов в канале 65000, максимальная скорость регистрации не менее 1000 1/с.
Кроме того, блок также содержит классификатор для классификации загрязнений морской воды по спектральным характеристикам и молекулярному составу морской воды, включающий датчик ядерно-магнитного резонанса, который представляет собой мини-магнитную систему, состоящую из самарий-кобальтовых шайб с большой постоянной намагниченностью и большой энергоемкостью. При массе магнита 9 кг удается достигнуть значения индукции магнитного поля в его зазоре до 1,5 Т. Таким образом, при плавной механической регулировке междуполюсного расстояния магнитной системы рабочая частота может изменяться в пределах от 12 до 60 МГц для протонов при сохранении достаточно высокой однородности. Магнит функционирует без потребления энергоресурсов и предназначен для выявления распределения температуры морской воды, солености, наличие кислорода на фиксированном разрезе. Известно, что в морской воде содержится большое количество парамагнитных примесей в виде парамагнитных ионов переходных металлов и их комплексных соединений в парамагнитном состоянии. По сигналам, полученным с датчика ядерно-магнитного резонанса строят графики распределения времени спин-решеточной релаксации (T1) (так называемые изолинии T1) в поверхностном и в придонном слоях воды. Полученные изолинии позволяют выявить зоны влияния на компонентный состав приповерхностной и придонной морской воды таких источников парамагнитных примесей, как речной сток и области геохимической аномалии, приуроченные к геологическому разлому.
По выявленным трассерам устанавливают динамику водных масс по глубине установки зонда 18. По концентрационным полям парамагнитных примесей определяют степень загрязнения техногенного характера.
Система работает следующим образом.
Показания измерительных датчиков и комплексных измерительных устройств, входящих в состав первого 1, второго 2 и третьего 3 наборов измерительных датчиков и комплексных измерительных устройств, автоматически в режиме реального времени считываются в устройство считывания первичных данных 4, в котором эти данные хранятся и периодически обновляются. При этом каждому измерительному датчику и комплексному измерительному устройству, входящему в первый 1, второй 2 и третий 3 наборы измерительных датчиков и комплексных измерительных устройств, соответствует свой адрес в устройстве считывания первичных данных 4. В процессе выполнения измерений на ходу судна в третий набор измерительных датчиков 3 из устройства забора забортной воды 12, расположенного в контейнере вместе с первым набором измерительных датчиков и комплексных измерительных устройств 1, автоматически постоянно на ходу судна по водопроводу 14 поступает забортная морская вода, которая используется измерительными датчиками и комплексными измерительными устройствами, входящими в третий набор 3, для анализа содержания в ней различных веществ. Сведения о месте нахождения судна поступают из устройства определения координат судна 6 в устройство управления 5, в которое одновременно из устройства определения координат луча сканирования искусственным спутником Земли 8 поступает информация о координатах луча сканирования водной поверхности измерительными датчиками и комплексными измерительными устройствами искусственного спутника Земли. Координаты луча сканирования определяются следующим образом. В устройстве определения координат луча сканирования искусственным спутником Земли 8 хранятся данные о параметрах движения искусственных спутников Земли. В момент времени, когда сигнал, передаваемый со спутника, попадает в область уверенного приема спутникового сигнала устройством приема спутниковой информации 7, расположенным на судне, из устройства приема спутниковой информации 7 в устройство определения координат луча сканирования искусственным спутником Земли 8 поступают сигналы, соответствующие началу приема каждой строки сканирования. В устройстве определения координат луча сканирования искусственным спутником Земли 8 на основании этих данных и параметров движения искусственных спутников Земли автоматически для каждого момента времени определяются координаты луча сканирования водной поверхности Земли, которые затем и поступают в устройство управления 5. Одновременно, начиная с момента начала приема, в устройство хранения спутниковой информации 9 поступают данные из устройства приема спутниковой информации 7. В устройстве управления 5 упомянутые координаты сравниваются и, в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств спутника и устройства определения координат судна 6, из устройства управления 5 в устройство считывания первичных данных 4 автоматически передаются упомянутые координаты и команда, по которой данные, соответствующие показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав первого 1, второго 2 и третьего 3 наборов, считываются из устройства считывания первичных данных 4 и записываются в устройство памяти 10 по адресам, соответствующим номерам измерительных датчиков и комплексных измерительных устройств, в которое одновременно записываются совпавшие координаты судна и координаты луча сканирования водной поверхности измерительными датчиками и комплексными измерительными устройствами искусственного спутника Земли. Затем эти данные передаются в устройство корректировки спутниковой информации и хранения океанографических характеристик 11, в которое также из устройства хранения спутниковой информации 9 поступает спутниковая информация и соответствующие каждому пикселю координаты луча сканирования водной поверхности Земли, в которое, в свою очередь, из устройства определения координат луча сканирования искусственным спутником Земли 8 поступают текущие значения координат луча сканирования. В устройстве корректировки спутниковой информации и хранения океанографических характеристик 11 сопоставляются спутниковые данные и результаты измерений, полученные измерительными датчиками и комплексными измерительными устройствами, входящими в состав первого 1, второго 2 и третьего 3 наборов, в момент совпадения координат судна и луча сканирования. По результатам сопоставления определяются градуировочные коэффициенты, которые используются для корректировки полученной со спутника информации. По специальным алгоритмам и математическим программам с учетом гидрометеорологических условий проведения подспутниковых измерений и параметров атмосферы производится автоматическая корректировка спутниковой информации в отношении каждого пикселя для всех пикселей, составляющих спутниковую информацию, по которым определяются океанографические характеристики и строятся их пространственные распределения (океанографические поля). Устройство памяти 10, устройство хранения спутниковой информации 9, устройство управления 5, устройство определения координат луча сканирования искусственным спутником Земли 8, устройство корректировки спутниковой информации и хранения океанографических характеристик 11 могут быть реализованы на базе стандартной ЭВМ.
Аппаратура спутниковых измерений дополнительно содержит лидар, содержащий лазер красного и зеленого диапазонов, что обеспечивает выполнить топографическую и батиметрическую съемку.
Батиметрическая съемка выполняется также посредством многолучевого эхолота и гидролокатора бокового обзора с обнаружением подводных объектов. Дополнительно введенный еще один набор измерительных датчиков и комплексных измерительных устройств 17, состоящих из измерителей вертикальных профилей растворенного метана, содержания нитратов альфа-, бета- и гамма-радиоактивности, зональной и меридиональной компонент скорости течения, скорости звука в морской воде в сочетании с соответствующим программным обеспечением позволяет выполнять автоматизированные измерения вертикальных профилей следующих параметров состояния водных масс и морских экосистем: растворенный метан CH4, растворенный кислород О2, % насыщения воды кислородом О2, водородный показатель pH, соленость воды S, температура воды, прозрачность воды, концентрация хлорофилла, содержание нитратов, содержание взвеси, парамагнитных примесей, растворенный углекислый газ СО2, а также выполнять автоматизированные измерения вертикальных профилей следующих параметров, играющих ключевую роль в переносе загрязнений: зональная компонента скорости течения U, меридиональная компонента скорости течения V, амплитуда поверхностных морских волн, длина поверхностных волн, направление распространения поверхностных волн.
Исходными данными для получения параметров волнения являются измерения давления в месте расположения прибора. Давление меняется в соответствии с изменениями расстояния между водной поверхностью и прибором. Когда расстояние увеличивается, давление также увеличивается. Когда расстояние уменьшается, давление также уменьшается.
Параметры волны рассчитываются на основании, полученных волнограмм, содержащих 2N измерений, где N=7, 8 …, 12. Давление измеряется при частоте 2 Гц так, чтобы длительность волновых записей варьировалась от 64 с до 2048 с.
Так как волновое движение на поверхности моря вызывает динамическое изменение давления, которое может быть измерено с помощью датчика давления, расположенного в зонде, размещенном между дном и поверхностью моря, и так как при этом магнитуда наблюдаемого динамического давления зависит от периода волн на поверхности и глубины нахождения зонда, то спектр мощности корректируется перед расчетом волновых параметров на разницу между действительным динамическим давлением и динамическим давлением, наблюдаемым в точке установки зонда.
По зарегистрированным датчиком давления значениям спектра мощности рассчитываются.
Средняя высота первой трети самых высоких волн в волнограмме:
 ,
,
где m0 - момент нулевого порядка ( , где αi - амплитуда волны).
, где αi - амплитуда волны).
Максимальная высота волны:  , где Ci - масштабный коэффициент, RMD - отношение величины среднего волнового периода к длительности волнограммы (число волн в волнограмме).
, где Ci - масштабный коэффициент, RMD - отношение величины среднего волнового периода к длительности волнограммы (число волн в волнограмме).
Среднее значение периода пересечения нулевой поверхности определяется как длина записи волнограммы, разделенная на количество пересечений в записи волнограммы:
 .
.
Период спектрального максимума TWp: TW=1/fWp, где fWp - частота пика волнового спектра.
Среднее значение волнового периода Tm01: Tm01=m0/m1.
Период энергетического максимума Tm-10=m-1/m0.
Мощность волны J=0,49hm0 Tm-10.
Пиковость спектра Qp: 
где S(fi) - компонент волнового спектра при этой частоте, fi - специфическая частота. Крутизна волны ξ: ξ=2πh/gT2.
Промышленная реализация предлагаемого способа определения и построения пространственного распределения океанографических характеристик и системы определения и построения пространственного распределения океанографических характеристик для реализации способа технической сложности не представляет, так как средства измерения имеют промышленную применимость.
Источники информации.
1. Патент US №5209112.
2. Дистанционное зондирование моря с учетом атмосферы./Под ред. В.А. Урденко и Г. Циммермана. Сб. статей, Выпуск института Космических исследований АН ГДР, Москва-Берлин-Севастополь, 1985 г., стр. 6-19.
3. Патент RU №2156958 С1, 27.09.2000.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2559338C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156958C1 |
| ТЕРМОЗОНД ДЛЯ ИЗМЕРЕНИЯ ВЕРТИКАЛЬНОГО РАСПРЕДЕЛЕНИЯ ТЕМПЕРАТУРЫ ВОДЫ | 2012 |
|
RU2513635C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| СПОСОБ ОБНАРУЖЕНИЯ ВОЗМОЖНОСТИ НАСТУПЛЕНИЯ КАТАСТРОФИЧЕСКИХ ЯВЛЕНИЙ | 2012 |
|
RU2521762C1 |
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ РАЗМЕРНО-КОЛИЧЕСТВЕННЫХ ХАРАКТЕРИСТИК ВЗВЕШЕННЫХ В ВОДЕ ЧАСТИЦ | 2012 |
|
RU2524560C1 |
| МЕТЕОРОЛОГИЧЕСКАЯ РАДИОЛОКАЦИОННАЯ СТАНЦИЯ | 2014 |
|
RU2574167C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2014 |
|
RU2561229C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
Изобретение может быть использовано для определения океанографических характеристик и выявления их пространственного распределения. Сущность: система включает подспутниковые (судовые) и спутниковые средства измерений океанографических характеристик. Подспутниковые средства измерений представлены четырьмя наборами измерительных датчиков и комплексных измерительных устройств, первый (1) из которых размещен на носовой части судна, находящейся под водой, второй (2) - на носовой части судна, находящейся над водой, третий (3) - на борту судна, четвертый (17) - на носителе (18), выполненном в виде зонда, сочлененного с якорно-буйрепным устройством (19). Первый (1) набор состоит из датчиков температуры, электропроводности и давления морской воды, концентрации кислорода, показателя рассеяния света в воде, устройства (12) забора забортной морской воды, многолучевого эхолота, гидролокатора бокового обзора. Второй (2) набор состоит из датчиков температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измерителя флюоресценции фитопланктона и растворенного (желтого) органического вещества, измерителя радиационной температуры морской поверхности, измерителя спектральных яркостей неба, моря и облученности морской поверхности солнечным излучением. Третий (3) набор состоит из измерителя спектрального показателя ослабления света морской воды, измерителя флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измерителя концентрации хлорофилла и растворенного (желтого) органического вещества, измерителя концентрации каротиноидов, феофитина, углерода. Четвертый набор (17) состоит из измерителей вертикальных профилей растворенного метана, содержания нитратов альфа-, бета- и гамма-радиоактивности, зональной и меридиональной компонент скорости течения, скорости звука в морской воде. Спутниковые средства измерений включают лидар, содержащий лазер красного и зеленого диапазонов, устройство (6) определения координат судна, устройство (8) определения координат луча сканирования водной поверхности искусственным спутником Земли. Показания подспутниковых средств измерений используют при корректировке спутниковых данных в устройстве (11) коррекции спутниковой информации и хранения океанографических данных. Технический результат: повышение достоверности при определении океанографических характеристик и выявлении их пространственного распределения. 2 н.п. ф-лы, 1 ил.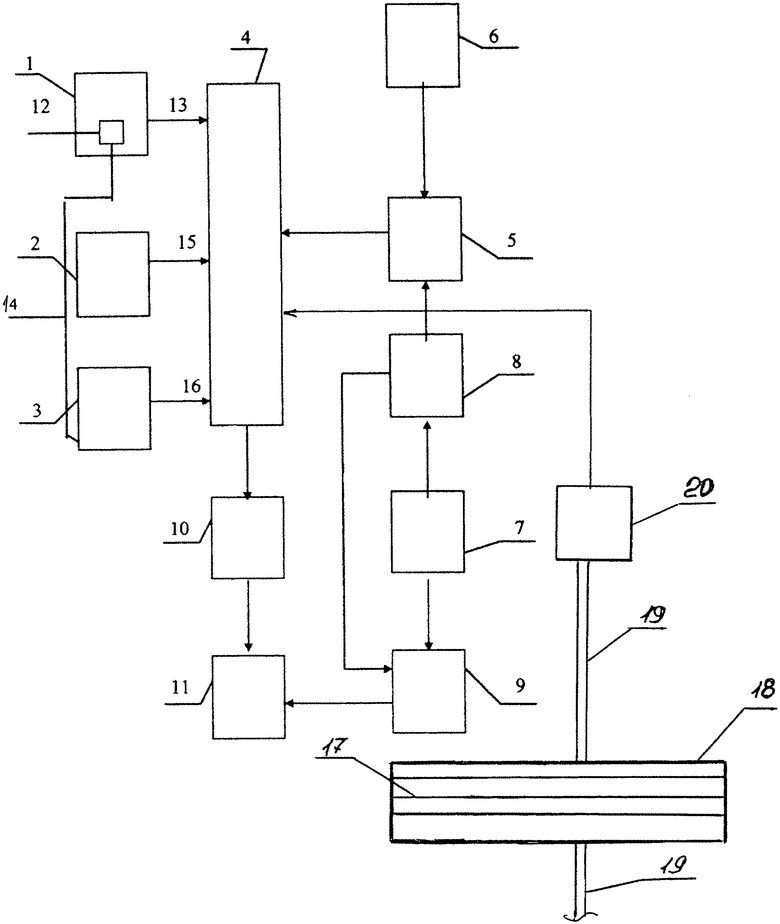
1. Способ определения и построения пространственного распределения океанографических характеристик, заключающийся в том, что с помощью измерительных датчиков и комплексных измерительных устройств проводят комплексные подспутниковые (судовые) и спутниковые измерения океанографических характеристик, при этом результаты подспутниковых и спутниковых измерений сохраняют в устройстве памяти и по показаниям упомянутых измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственные распределения океанографических характеристик исследуемых акваторий, причем первый набор измерительных датчиков и комплексных измерительных устройств погружают в воду, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна, расположенной над водой, третий набор измерительных датчиков и комплексных измерительных устройств размещают на борту судна, в режиме реального времени считывают и записывают показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, в устройство считывания первичных данных, в котором показания упомянутых измерительных датчиков и комплексных измерительных устройств в процессе непрерывных измерений периодически обновляются, с искусственного спутника Земли принимают данные дистанционного зондирования водной поверхности, считывают координаты судна из устройства определения координат судна, из устройства определения координат луча сканирования водной поверхности искусственным спутником Земли считывают координаты луча сканирования водной поверхности, сравнивают их с упомянутыми координатами судна и в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств упомянутого искусственного спутника Земли и устройства определения координат судна из упомянутого устройства считывания первичных данных считывают в упомянутое устройство памяти и запоминают соответствующие упомянутым координатам показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, и соответствующие значения упомянутых координат, регистрируют данные дистанционного зондирования водной поверхности искусственным спутником Земли, определяют градуировочные коэффициенты и по упомянутым показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов датчиков и комплексных измерительных устройств, полученным при совпадении координат судна и координат луча сканирования водной поверхности, корректируют упомянутую спутниковую информацию, отличающийся тем, что в спутниковые измерения океанографических характеристик дополнительно включают топографическую съемку прибрежной территории посредством лазера в красном диапазоне, измерения глубины акватории посредством лазера зеленого диапазона, первым набором измерительных датчиков и комплексных измерительных устройств выполняют акустическое зондирование морского дна, определяют высоту, период, мощность и крутизну поверхностных волн посредством датчика давления, измеряют дополнительные океанографические параметры посредством дополнительного набора измерительных датчиков и комплексных измерительных устройств, размещенных на носителе, выполненном в виде зонда, сочлененного с якорно-буйрепным устройством, размещенным в кормовой части судна.
2. Система определения и построения пространственного распределения океанографических характеристик, включающая наборы измерительных датчиков и комплексных измерительных устройств, устройство приема спутниковых данных и устройство памяти, устройство считывания первичных данных, устройство управления, устройство определения координат луча сканирования водной поверхности искусственным спутником Земли и устройство определения координат судна, устройство хранения спутниковых данных и устройство корректировки спутниковых данных и хранения океанографических характеристик, при этом первый набор измерительных датчиков и комплексных измерительных устройств закреплен на носовой части судна, находящейся под водой, второй и третий наборы измерительных датчиков и комплексных измерительных устройств размещены соответственно на носовой части судна, расположенной над водой, и на борту упомянутого судна, первый, второй и третий наборы измерительных датчиков и комплексных измерительных устройств соединены с устройством считывания первичных данных, которое соединено с упомянутыми устройством управления и устройством памяти, при этом устройство управления соединено с устройством определения координат судна и с устройством определения координат луча сканирования водной поверхности искусственным спутником Земли, которое соединено с устройством приема спутниковой информации, соединенным с устройством хранения спутниковой информации, в свою очередь, соединенным с устройством коррекции спутниковой информации и хранения океанографических данных, которое соединено с упомянутым устройством памяти, при этом первый набор измерительных датчиков и комплексных измерительных устройств состоит из датчиков температуры, электропроводности и давления морской воды, концентрации кислорода, показателя рассеяния света в воде и устройства забора забортной морской воды, второй набор измерительных датчиков и комплексных измерительных устройств состоит из датчиков температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измерителя флюоресценции фитопланктона и растворенного (желтого) органического вещества, измерителя (радиометра) радиационной температуры морской поверхности и измерителя спектральных яркостей неба, моря и облученности морской поверхности солнечным излучением, третий набор измерительных датчиков и комплексных измерительных устройств состоит из измерителя спектрального показателя ослабления света морской воды, измерителя флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измерителя концентрации хлорофилла и растворенного (желтого) органического вещества, измерителя концентрации каротиноидов, феофитина, углерода, отличающаяся тем, что аппаратура спутниковых измерений дополнительно содержит лидар, содержащий лазер красного и зеленого диапазонов, первый набор измерительных датчиков и комплексных измерительных устройств дополнительно содержит многолучевой эхолот, гидролокатор бокового обзора, дополнительно введен еще один набор измерительных датчиков и комплексных измерительных устройств, состоящий из измерителей вертикальных профилей растворенного метана, содержания нитратов альфа-, бета- и гамма-радиоактивности, зональной и меридиональной компонент скорости течения, скорости звука в морской воде, который размещен на носителе, выполненном в виде зонда, сочлененного с якорно-буйрепным устройством, размещенным в кормовой части судна.
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1999 |
|
RU2156958C1 |
| Пелевин В.Н | |||
| Исследование морей России дистанционными средствами с судов и космических носителей: оценка экологического состояния вод / Информационный бюллетень РФФИ, 1998, т.6, N 5 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОМПЛЕКСНЫХ ДАННЫХ О СОСТОЯНИИ ОКЕАНА | 2004 |
|
RU2282217C1 |
| СПОСОБ ГИДРОМЕТЕОРОЛОГОАКУСТИЧЕСКОГО НАБЛЮДЕНИЯ ЗА АКВАТОРИЕЙ МОРСКОГО ПОЛИГОНА | 2005 |
|
RU2304794C2 |
| US 5209112 A, 11.05.1993 | |||

