зобретение относится к области геофизических исследований, а именно к устройству зондирования гидросферы, и может быть использовано в составе зондирующих стационарных, якорных, дрейфующих и донных станций.
Известные устройства, представляющие собой зонды (патенты RU №38233U1, 27.05.2004,. RU №67057 U1, 10.10.2007, RU №56593 U1, 10.09.2006, авторское свидетельство SU №868434 A1, 30.09.1981, патент JP №2112779 A, 25.04.1990, патент RU №2365940 C1, 27.08.2009, патент RU №2370787, 20.10.2009 [1, 2, 3, 4, 5, 6, 7] или подводные зонды, содержат прочный корпус, выполненный в форме цилиндра, внутри которого размещена информационно-измерительная аппаратура, программно-управляющая аппаратура, блок энергопитания и устройство для регулирования плавучести зонда.
Технический результат известных устройств заключается в уменьшении габаритов и массы, повышения надежности работы, что достигается конструктивным исполнением устройств регулирования плавучести, представляющих собой сложные конструкции, включая устройство для перемещения магнитной жидкости, камеру сгорания. Преимущество данных устройств, которые содержит корпус, включающий в себя балластный блок, состоящий из камеры, верхняя часть которой наполнена рабочей магнитной жидкостью и сообщена с нижней частью этой камеры, где происходит вытеснение или прием жидкого балласта при помощи трубки, средняя часть которой уложена по спирали в статоре асинхронного электродвигателя, который преобразует энергию вращающегося магнитного потока статора в поступательное движение рабочей жидкости, позволяет уменьшить не только габариты зонда, но и обеспечивает регулирование положительной и отрицательной плавучести зонда, что обеспечивает его перемещение в водной среде.
Известные устройства сложны в изготовлении, занимают значительный внутренний полезный объем.
Известные подводные зонды для вертикального распределения температуры воды, по способу связи с обеспечивающим судном могут быть разделены на три группы: с кабельной линией связи, с автономной регистрацией данных и с гидроакустическим каналом связи термозонды (B.C. Ястребов. Методы и технические средства океанологии. Л.: Гидрометеоиздат. 1986, с.33-34 [8]). Зондирующие зонды с кабельным каналом связи обеспечивают достаточно высокую точность измерений и надежную передачу зарегистрированной информации. В качестве линии связи используются одножильные и многожильные кабель-тросы. Информация, поступающая на борт судна, как правило, оперативно обрабатывается судовой ЭВМ. В погружаемой части размещены лишь датчики температуры и давления резистивного типа. В качестве датчика давления используются мембранные, геликсные или иные чувствительные элементы с потенциометрическим выходом. Измерительная схема находится на борту судна и с зондом связана многожильным кабелем. В качестве измерительных схем в зондах используются уравновешенные мосты постоянного тока. Напряжение с выхода моста подается на двухкоординатный потенциометр-регистратор или через преобразователь аналог - код на вход ЭВМ.
Известны также так называемые теряемые термозонды (B.C.Ястребов. Методы и технические средства океанологии. Л.: Гидрометеоиздат. 1986, с.34). Они погружаются в режиме свободного падения, при этом с зонда разматывается тонкая проволока - кабель, по которой передается информация на судно. Когда кабель полностью размотан, зонд обрывается. В этих зондах нет датчика давления и глубина определяется по времени погружения. Структурная схема теряемого термозонда включает первичный преобразователь температуры, линию связи, измерительную схему и регистратор. В некоторых конструкциях таких зондов применяются кодовые или частотно-модулированные системы передачи данных. Они отличаются высокой помехоустойчивостью передачи информации и позволяют использовать одножильные кабель-тросы. Структурная схема таких зондов состоит из двух первичных преобразователей температуры, двух измерительных генераторов, линии связи, двух фильтров и двух преобразователей частота - напряжение и регистратора. Датчики температуры и глубины включены в схемы измерительных генераторов. Частотно-модулированные сигналы с выходов генераторов через кабельную линию поступают в судовой измерительный комплекс. Полосовые фильтры разделяют сигналы температуры и глубины, после чего они поступают на преобразователи частота -напряжение и далее на двухкоординатный потенциометр-регистратор или записываются на магнитную ленту или ленту перфоратора.
Аналогичную конструкцию имеет теряемый термозонд «Data Acquisition Systems» модели Mk-12 (1991, Sippican Inc., 7 Bamabas Road, Marion, MA 02738-9983, p.B-4 [9]). Термозонд размещается в цилиндрической металлической коробке, в верхней части коробка сочленена с контактным устройством. В верхней части коробки размещен термозонд, соединенный проволокой с контактным устройством. При контакте коробки с водной поверхностью шпилька выдергивается и контактное устройство вместе с термозондом погружается в сторону дна. Во время погружения посредством термозонда измеряют температуру воды и записывают измеренные температуры на ленту перфоратора, которая размещена в контактном устройстве, которое находится на поверхности. Когда проволока полностью размотана, зонд обрывается. Буксируемые приборы применяются для измерения пространственного распределения температуры воды в поверхностном и приповерхностном слое на ходу судна. При этом буксируемым прибором является термометр сопротивления, буксируемый за судном на кабель-тросе в поверхностном слое воды. Для исследования пространственного распределения температуры воды в слое толщиной несколько сот метров используются буксируемые гондолы и буксируемые термокосы с сосредоточенными и распределенными датчиками температуры. Буксируемые гондолы и термокосы имеют возможность перемещения по вертикали за счет управления рулями заглубляющих устройств.
Буксируемые гондолы представляют собой герметичный аппаратурный контейнер, связанный кабель-тросом с судном. Контейнер имеет специальные заглубители, которые позволяют удерживать его на заданном горизонте. Помимо датчика температуры часто устанавливается датчик электропроводности и другие измерители. Данные измерений обычно передаются по кабелю на борт судна, где регистрируются и обрабатываются. Иногда регистрация данных производится в аппаратном контейнере. Буксируемые термокосы представляют собой кабель-трос, по длине которого установлены датчики температуры - обычно термометры сопротивления. На нижнем конце кабель-троса закреплен заглубитель и установлен датчик давления, регистрирующий глубину хода нижнего конца термокосы. Датчики температуры подключены к линиям связи кабель-троса, по которым данные измерений передаются на судно. Схема измерения и преобразования строится по принципу последовательного или параллельного опроса датчиков. Данные измерений регистрируются самописцам в виде изотерм, которые характеризуют пространственное распределение температуры в верхнем слое воды.
Интегральная температура слоя от глубины z1 до z2 определяется выражением
Термокоса состоит из датчиков интегральной Т, поверхностной То и глубинной Тк температуры. На конце косы установлены датчик и заглубитель. Конструктивно коса представляет собой кабель-трос с заглубителем и аппаратурным контейнером на конце. В контейнере размещены преобразователь измеренной температуры в частоту и коммутатор каналов. В качестве датчиков температуры используются кварцевые пластины с температурным срезом. Точность преобразования температуры в частоту определяется в основном стабильностью опорного кварцевого генератора и временным дрейфом датчиков. Для измерения давления использовался датчик типа ПДВ-50А с классом точности 0,25. В качестве датчика интегральной температуры использовался трехжильный кабель-трос КТБ-6 с резиновой изоляцией медных жил. Длина кабеля 3000 м. Чувствительным элементом распределенного преобразователя температуры служат два соединенные между собой внутренние медные жилы кабеля. Третья жила и оплетка кабель-троса являются линией связи между аппаратурным контейнером и судном.
Информация от датчиков температуры и давления после преобразования в частоту поступает по кабелю на судно. Первичный преобразователь температуры включен в плечо прецизионного моста, который является стабилизированным напряжением и находится в термостате. В другое плечо моста помимо магазина сопротивлений включен компенсатор, представляющей собой отрезок кабель-троса КТБ-6. В диагональ моста включен самопишущий потенциометр КСП-4, регистрирующий интегральную температуру. Частотный сигнал датчика давления и глубинной температуры подается через фильтр низкой частоты на частотомер, с выхода которого он в виде параллельного двоично-десятичного кода поступает на преобразователь код-аналог и далее на самописец КСП-4. Термокоса для измерения интегральной температуры характеризуется следующей чувствительностью датчиков: интегральной температуры 0,02 градуса С, температуры поверхностных вод 0,005 градуса С, температуры глубинных вод 0,005 градуса С. Существенным недостатком буксируемых зондов является ограничение по погодным условиям.
Задачей заявляемого технического предложения является упрощение конструкции термозонда с одновременным расширением функциональных возможней. Термозонд для измерения вертикального распределения температуры воды, состоящий из корпуса, представляющего собой жесткую конструкцию, снабженного стабилизатором и размещенного в кассете, снабженной механизмом расчленения с корпусом термозонда, внутри корпуса термозонда размещены два первичных преобразователя температуры, два измерительных генератора, линии связи, два фильтра, два преобразователя частота - напряжение и регистратор, а также датчик глубины, датчик электропроводности и измеритель течения, отличается тем, что корпус в нижней части снабжен якорь -грузом с гидроакустическим размыкателем и приемопередающей антенной гидроакустического канала связи, в верхней части корпуса термозонда размещена антенна радиопередатчика спутникового радиоканала связи, который размещен внутри корпуса термозонда.
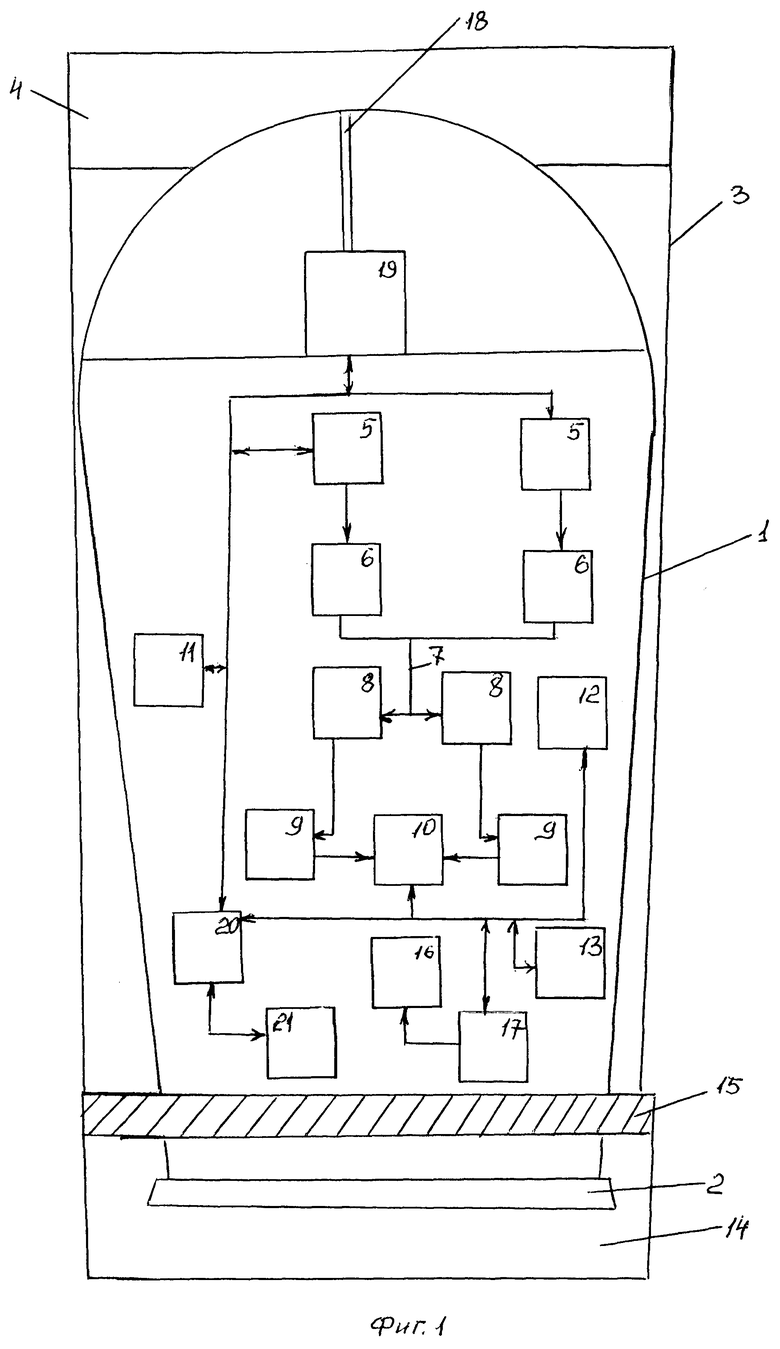
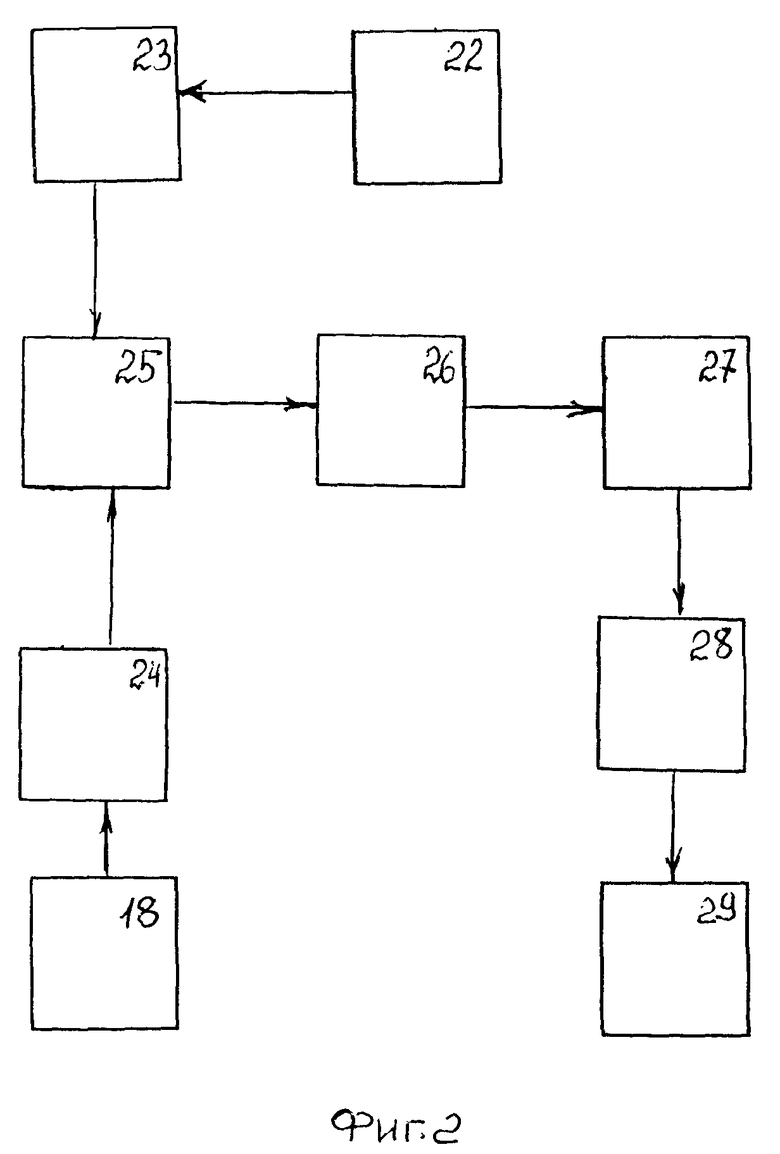
Сущность заявляемого технического предложения поясняется чертежами (фиг.1 и фиг.2). Фиг.1 - конструкция термозонда. Термозонд состоит из корпуса 1, представляющего собой жесткую конструкцию, снабженного стабилизатором 2 и размещенного в кассете 3, снабженной механизмом 4 расчленения с корпусом 1 термозонда, внутри корпуса 1 термозонда размещены два первичных преобразователя температуры 5, два измерительных генератора 6, линии связи 7, два фильтра 8, два преобразователя 9 частота - напряжение и регистратор 10, а также датчик глубины 11, датчик 12 электропроводности и измеритель 13 течения. Корпус 1 в нижней части снабжен якорь-грузом 14 с гидроакустическим размыкателем 15 и приемопередающей антенной 16 гидроакустического канала связи с пусковым устройством 17, в верхней части корпуса 1 термозонда размещена антенна 18 радиопередатчика 19 спутникового радиоканала связи, который размещен внутри корпуса термозонда. Режимы работы термозонда регулируются блоком управления 20. Внутри корпуса термозонда также размещен источник питания 21. Фиг.2 - структурная схема радиопередатчика. Радиопередатчик 19 состоит из опорного генератора 22, формирователя 23 коротких импульсов, мультиплексора-формирователя 24 уровня девиации, двухконтурного фильтра-модулятора 25 девятой гармоники, утроителя 26 частоты до 135 МГц, схемы 27 фазовой автоподстройки частоты, утроителя 28 частоты до 405 МГц, усилителя мощности 29, штыревой антенны 18. Корпус 1 термозонда представляет собой жесткую конструкцию и может быть выполнен из синтактика (сферопласта) или специальных пластмасс, например, макрлона. Стабилизатор 2 предназначен для стабилизации термозонда при его погружении и всплытии и выполнен в виде резинового амортизатора.
Стабилизация термозонда достигается смещением центра тяжести вниз (глубоко под воду), малой надводной и подводной парусностью. Радиопередатчик 19 предназначен для передачи результатов измерения гидрометеорологических параметров по радиоканалу спутниковой системы, обеспечивающей по радиосигналам идентификацию дрейфующего зонда и определение координат его местоположения, и выполняет функции формирования передаваемого кадра, формирования радиосигнала и передачи информационного кадра в импульсом режиме излучения.
Радиопередатчик 19 обеспечивает работу в режиме передачи на несущей частоте 405937,5±5кГц.
Штыревая антенна 18 обеспечивает диаграмму излучения, аналогичную диаграмме четвертьволнового штыря с допустимыми отклонениями в пределах от -3 до 4дБ в рабочем диапазоне углов места от 10 до 60 градусов. Гидроакустический размыкатель 15 типа АГАР-МП представляет собой автоматическое телеуправляемое устройство, обеспечивающее отсоединение якоря - груза 14 от корпуса 1 термозонда. В конкретном исполнении использован гидроакустический размыкатель с электромагнитным исполнительным механизмом, который имеет следующие характеристики: максимальная рабочая глубина 6000 м; дальность связи по гидроакустическому каналу связи 8000 м; число каналов управления до 90; погрешность измерения наклонной дальности ±15 м; диапазон рабочих частот 8-12,5 кГц. Структурная схема (фиг.1.) термозонда состоит из двух первичных преобразователей 5 температуры, двух измерительных генераторов 6, линии связи 7, двух фильтров 8 и двух преобразователей 9 частота-напряжение и регистратора 10. Датчики измерения температуры глубины 11, электропроводности 12 и течения 13 включены в схемы измерительных генераторов 6. Частотно-модулированные сигналы с выходов генераторов 6 через кабельную линию связи 6 поступают в судовой измерительный комплекс. Полосовые фильтры 8 разделяют сигналы температуры и глубины, после чего они поступают на преобразователи 9 частота - напряжение и далее на двухкоординатный потенциометр-регистратор 10 или записываются на магнитную ленту или ленту перфоратора.
Сброс термозонда на водную поверхность производится с обеспечивающего судна с помощью механизма кассетных держателей.
В момент приводнения при ударе кассеты 3 о воду срабатывает механизм 4 расчленения корпуса 1 термозонда, после отстыковки кассета 3 поднимается на борт обеспечивающего судна, а термозонд под тяжестью якорь-груза 14 погружается. В момент отстыковки контейнера срабатывает таймер, входящий в состав блока управления 20 и который, в свою очередь, запускает в работу источник тока 21. После активации источника тока 21 подается напряжение на аппаратуру измерения размещенную в термозонде и пусковое устройство 17. Пусковое устройство 17 срабатывает, освобождая приемопередающую антенну 16 гидроакустического канала связи.
При достижении дна термозонд продолжает измерять гидрологические параметры по установленной программе. При выполнении программы донных измерений по команде, передаваемой с обеспечивающего судна по гидроакустическому каналу связи, срабатывает гидроакустический размыкатель 15, якорь-груз 14 отсоединяется от корпуса 1 термозонда и термозонд начинает подъем на водную поверхность, а измерительная аппаратура продолжает регистрировать гидрологические параметры. При достижении водной поверхности, по команде, передаваемой с обеспечивающего судна по гидроакустическому каналу связи, срабатывает телескопическое устройство, на котором установлена антенна 18 спутникового радиоканала связи. При этом термозонд продолжает измерять гидрологические параметры, посредством измерительной температуры, а также благодаря наличию спутникового канала связи появляется возможность определения параметров поверхностного волнения. Определение параметров волнения осуществляется путем получения профиля волнения интегральным методом исходя из данных о вертикальной скорости перемещения термозонда при слежении за ним посредством аппаратуры, установленной на искусственном спутнике Земли, что позволяет исключить из обработки грубые измерения высоты и получать информацию о движении термозонда лишь по высокоточным данным о скорости. При этом вторичная обработка данных спутникового приемника включает несколько стандартных алгоритмов, включающих рекурентный следящий фильтр с бесконечной импульсной характеристикой и постоянной времени первого порядка астатизма, следящий фильтр второго порядка астатизма, стандартные оценки среднего значения и средней квадратической ошибки, стандартные алгоритмы выделения первичной волны (первой гармоники ряда Фурье). При этом неизвестная фаза первичной волны исключается при вычислении корня квадратного из суммы квадратов, усредненных за 15 минут амплитуд косинусной и синусной составляющих, а направление распространения волн определяются по восточной и северной составляющим вариаций скорости (орбитального движения).
Практическая реализация предлагаемого способа технической сложности не представляет, так как для его реализации используются средства, имеющие промышленную применимость.
Источники информации
1. Патент RU №38233 U1, 27.05.2004.
2. Патент RU №67057 U1, 10.10.2007.
3. Патент RU №56593 U1, 10.09.2006.
4. Авторское свидетельство SU №868434 A1, 30.09.1981.
5. Патент JP №2112779 A, 25.04.1990.
6. Патент RU №2365940 С1, 27.08.2009.
7. Патент RU №2370787, 20.10.2009.
8. B.C. Ястребов. Методы и технические средства океанологии. Л.: Гидрометеоиздат, 1986, с.33-34.
9. «Data Acquisition Systems» модели Mk-12 (1991, Sippican Inc., 7 Bamabas Road Marion, MA 02738-9983, p.B-4.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОДВОДНАЯ СТАНЦИЯ | 2014 |
|
RU2563316C1 |
| МАЛОГАБАРИТНЫЙ ДОННЫЙ СЕЙСМИЧЕСКИЙ МОДУЛЬ | 2014 |
|
RU2554283C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ | 2010 |
|
RU2419574C1 |
| СИСТЕМА ИЗМЕРЕНИЯ ГИДРОЛОГИЧЕСКИХ ПАРАМЕТРОВ НА БОЛЬШИХ ГЛУБИНАХ | 2014 |
|
RU2571292C1 |
| МОРСКОЙ ЭКОЛОГО-ЭНЕРГЕТИЧЕСКИЙ КОМПЛЕКС | 2011 |
|
RU2466053C1 |
| БУКСИРУЕМЫЙ ПОДВОДНЫЙ АППАРАТ, ОСНАЩЕННЫЙ ГИДРОАКУСТИЧЕСКОЙ АППАРАТУРОЙ ДЛЯ ОБНАРУЖЕНИЯ ЗАИЛЕННЫХ ОБЪЕКТОВ И ТРУБОПРОВОДОВ | 2010 |
|
RU2463203C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК | 2014 |
|
RU2556289C1 |
| ПОДВОДНЫЙ ЗОНД | 2010 |
|
RU2436119C1 |
| ГИДРОАКУСТИЧЕСКАЯ СИНХРОННАЯ ДАЛЬНОМЕРНАЯ НАВИГАЦИОННАЯ СИСТЕМА ДЛЯ ПОЗИЦИОНИРОВАНИЯ ПОДВОДНЫХ ОБЪЕКТОВ В НАВИГАЦИОННОМ ПОЛЕ ПРОИЗВОЛЬНО РАССТАВЛЕННЫХ ГИДРОАКУСТИЧЕСКИХ МАЯКОВ-ОТВЕТЧИКОВ | 2011 |
|
RU2483326C2 |
| ДОННАЯ СТАНЦИЯ | 2012 |
|
RU2484504C1 |
Изобретение относится к устройствам для зондирования гидросферы. Заявлен термозонд для измерения вертикального распределения температуры воды, состоящий из корпуса, представляющего собой жесткую конструкцию, снабженного стабилизатором и размещенного в кассете, снабженной механизмом расчленения с корпусом термозонда. Внутри корпуса термозонда размещены два первичных преобразователя температуры, два измерительных генератора, линии связи, два фильтра, два преобразователя частота - напряжение и регистратор, а также датчик глубины, датчик электропроводности и измеритель течения. Корпус в нижней части снабжен якорь-грузом с гидроакустическим размыкателем и приемопередающей антенной гидроакустического канала связи. В верхней части корпуса термозонда размещена антенна радиопередатчика спутникового радиоканала связи, который размещен внутри корпуса термозонда. Технический результат - расширение функциональных возможностей устройства. 2 ил.
Термозонд для измерения вертикального распределения температуры воды, состоящий из корпуса и представляющего собой жесткую конструкцию, снабженного стабилизатором и размещенного в кассете, снабженной механизмом расчленения с корпусом термозонда, внутри корпуса термозонда размещены два первичных преобразователя температуры, два измерительных генератора, линии связи, два фильтра, два преобразователя частота - напряжение и регистратор, а также датчик глубины, датчик электропроводности и измеритель течения, отличающийся тем, что корпус в нижней части снабжен якорь-грузом с гидроакустическим размыкателем и приемопередающей антенной гидроакустического канала связи, в верхней части корпуса термозонда размещена антенна радиопередатчика спутникового радиоканала связи, который размещен внутри корпуса термозонда.
| Сварочный аппарат для автоматической дуговой сварки | 1944 |
|
SU66063A1 |
| ГИДРОХИМИЧЕСКАЯ ДОННАЯ ОБСЕРВАТОРИЯ | 2010 |
|
RU2447466C2 |
| Способ получения тетра-(а -тиенил)-боркалия | 1956 |
|
SU106396A1 |
| МОРСКАЯ АВТОНОМНАЯ ДОННАЯ СЕЙСМИЧЕСКАЯ СТАНЦИЯ | 2004 |
|
RU2276388C1 |
| АВТОНОМНАЯ БУЙКОВАЯ ПРИДОННАЯ СТАНЦИЯ | 2007 |
|
RU2344962C1 |
| Станок для выдавливания кольцевых выступов на трубах | 1952 |
|
SU97524A1 |
| JP 4354686 B2 , 28.10.2009 | |||

