Изобретение относится к определению океанографических характеристик и построению их пространственного распределения и может быть использовано для географических и природоресурсных исследований океанов и морей.
Известен способ определения океанографических характеристик и устройство для его реализации, основанные на использовании набора измерительных датчиков, которые с помощью самолета или судна погружают в воду, зондируют ими водную толщу до дна, измеряя при этом океанографические характеристики. Результаты измерения записывают и хранят в устройстве памяти, а затем, когда датчики находятся на поверхности, по команде в определенный момент времени передают их на искусственный спутник Земли или другое приемное устройство (патент США N 5209112, кл. G 01 W 1/00).
Недостатком описанных способа и устройства для его реализации является низкая информативность измерений, обусловленная невозможностью измерения параметров светового поля над морской поверхностью, в части регистрации спектров выходящего из моря солнечного излучения, несущих информацию о концентрации в морской воде взвешенного минерального и органического, а также растворенного органического веществ, но которые регистрируются спутниковой аппаратурой. Также описанные способ и устройство не позволяют достичь относительно высокой точности корректировки спутниковых данных из-за недостаточного объема информации.
Наиболее близким к заявляемому изобретению является способ определения и построения пространственного распределения океанографических характеристик и система для его реализации, основанные на комплексных подспутниковых (судовых) и спутниковых измерениях океанографических характеристик с помощью измерительных датчиков и комплексных измерительных устройств, при этом с помощью измерительных датчиков и комплексных измерительных устройств, установленных на судне, измеряют океанографические характеристики, а именно гидрофизические характеристики морской воды и ее поверхности, метеорологические характеристики и параметры светового поля над морской поверхностью с помощью измерительных датчиков и комплексных измерительных устройств, установленных на искусственных спутниках Земли, зондируют водную поверхность и принимают данные дистанционного зондирования водной поверхности, данные подспутниковых и спутниковых измерений сохраняют в устройстве памяти, по показаниям упомянутых измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственное распределение океанографических характеристик, исследуемых акваторий (Дистанционное зондирование моря с учетом атмосферы. Под редакцией В. А. Урденко и Г. Циммермана. Сб. статей, Выпуск института Космических исследований АН ГДР, Москва-Берлин-Севастополь, 1985 г., стр. 6-19).
Недостатками описанных способа и системы для его реализации являются низкая информативность измерений и точность корректировки спутниковых данных за счет недостаточной синхронности подспутниковых (судовых) и спутниковых измерений, что приводит к необходимости пространственно-временного усреднения измеряемых океанографических характеристик, а также высокая стоимость описанных способа и системы. Недостаточная синхронность подспутниковых (судовых) и спутниковых измерений и низкая точность определения океанографических характеристик с использованием описанного выше способа обусловлена тем, что измерения выполняют на стоянках (на станциях) судна путем зондирования измерительными датчиками и комплексными измерительными устройствами водной толщи или путем их буксировки на ходу судна, при этом в последнем случае измерения в поверхностных слоях воды производят в возмущенной корпусом движущегося судна водной среде, что вносит значительную погрешность в определение реальных значений гидрофизических и других океанологических характеристик.
Высокая стоимость описанного выше способа и системы для ее реализации обусловлена тем, что для проведения подспутниковых измерений используют научно-исследовательское судно, имеющее водоизмещение от 800-1000 и более тонн и оснащенное дорогостоящей научной аппаратурой и оборудованием. На эксплуатацию такого судна тратятся большие финансовые средства. Кроме того, для эксплуатации и обслуживания сложной научной аппаратуры и оборудования, а также для научного руководства экспериментальными работами в море привлекается большое число высококвалифицированных специалистов, которые относительно длительное время проводят в море и в связи с этим на их содержание тратятся также большие денежные средства.
Задача, на решение которой направлено заявляемое изобретение, заключается в повышении информативности измерений и точности определения и построения пространственного распределения океанографических характеристик (океанографических полей) исследуемых акваторий, а также в снижении стоимости способа и системы для его реализации.
Указанная задача решается за счет того, что способ определения и построения пространственного распределения океанографических характеристик, заключающийся в том, что с помощью измерительных датчиков и комплексных измерительных устройств производят комплексные подспутниковые (судовые) и спутниковые измерения океанографических характеристик, при этом результаты подспутниковых и спутниковых измерений сохраняют в устройстве памяти и по показаниям упомянутых измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственные распределения океанографических характеристик исследуемых акваторий, дополнен тем, что первый набор измерительных датчиков и комплексных измерительных устройств погружают в воду, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна, расположенной над водой, третий набор измерительных датчиков и комплексных измерительных устройств размещают на борту судна, в режиме реального времени считывают и записывают показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, в устройство считывания первичных данных, в котором показания упомянутых измерительных датчиков и комплексных измерительных устройств в процессе непрерывных измерений периодически обновляют, с искусственного спутника Земли принимают данные дистанционного зондирования водной поверхности Земли, считывают координаты судна из устройства определения координат судна, из устройства определения координат луча сканирования водной поверхности искусственным спутником Земли считывают координаты луча сканирования водной поверхности, сравнивают их с упомянутыми координатами судна и в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств упомянутого искусственного спутника Земли и устройства определения координат судна из упомянутого устройства считывания первичных данных считывают в упомянутое устройство памяти и запоминают соответствующие упомянутым координатам показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, и соответствующие значения упомянутых координат регистрируют данные дистанционного зондирования водной поверхности искусственным спутником Земли, определяют градуировочные коэффициенты и по упомянутым показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов датчиков и комплексных измерительных устройств, полученным при совпадении координат судна и координат луча сканирования водной поверхности Земли, корректируют упомянутую спутниковую информацию.
При этом первый набор измерительных датчиков и комплексных измерительных устройств крепят жестко с помощью электромагнитного устройства или постоянного магнита к носовой части судна ниже его ватерлинии, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна над водой таким образом, чтобы в поле зрения упомянутого второго набора измерительных датчиков и комплексных измерительных устройств не попадало отраженное от морской поверхности рассеянное бортом носовой части судна солнечное излучение. Первым, вторым и третьим наборами измерительных датчиков и комплексных измерительных устройств измерения выполняют на ходу судна в невозмущенной водной среде. Первым набором измерительных датчиков и комплексных измерительных устройств контактно измеряют изменение скорости воды и вибрацию судна, температуру, электропроводность и давление воды, концентрацию кислорода и показатель рассеяния света в воде. Вторым набором измерительных датчиков и комплексных измерительных устройств измеряют контактно температуру, влажность и давление атмосферного воздуха, направление и скорость приводного ветра, дистанционно в забортной морской воде флюоресценцию хлорофилла фитопланктона и растворенного (желтого) органического вещества, дистанционно - радиационную температуру морской поверхности, спектральные яркость неба, яркость моря и облученность морской поверхности солнечным излучением. Третьим набором датчиков и комплексных измерительных устройств измеряют в проточной забортной морской воде спектральный показатель ослабления света, флюоресценцию хлорофилла и растворенного (желтого) органического вещества, концентрацию хлорофилла, каротиноидов, феофитина, углерода, при этом в третий набор измерительных датчиков и комплексных измерительных устройств забортную морскую воду подают по водопроводу автоматически на ходу судна из устройства забора забортной воды, размещенного в первом наборе измерительных датчиков и комплексных измерительных устройств.
Указанная задача решается также и за счет того, что в систему определения и построения пространственного распределения океанографических характеристик, включающую измерительные датчики и комплексные измерительные устройства, устройство приема спутниковых данных и устройство памяти, дополнительно введены устройство считывания первичных данных, устройство управления, устройство определения координат луча сканирования водной поверхности Земли искусственным спутником Земли и устройство определения координат судна, устройство хранения спутниковых данных и устройство корректировки спутниковых данных и хранения океанографических характеристик, при этом первый набор измерительных датчиков и комплексных измерительных устройств закреплен на носовой части судна, находящейся под водой, второй и третий наборы измерительных датчиков и комплексных измерительных устройств размещены соответственно на носовой части судна, расположенной над водой, и борту упомянутого судна, упомянутые первый, второй и третий наборы измерительных датчиков и комплексных измерительных устройств соединены с упомянутым устройством считывания первичных данных, которое соединено с упомянутым устройством управления и с упомянутым устройством памяти, при этом упомянутое устройство управления соединено с упомянутым устройством определения координат судна и с упомянутым устройством определения координат луча сканирования водной поверхности Земли искусственным спутником Земли, которое соединено с упомянутым устройством приема спутниковой информации, соединенным с устройством хранения спутниковой информации, в свою очередь соединенным с упомянутым устройством коррекции спутниковой информации и хранения океанографических данных, которое соединено с упомянутым устройством памяти. При этом первый набор измерительных датчиков и комплексных измерительных устройств содержит устройство забора забортной морской воды, соединенное водопроводом с третьим набором измерительных датчиков и комплексных измерительных устройств, трехкоординатный измеритель изменения скорости воды и вибрации судна и измерительные датчики: температуры, электропроводности и давления морской воды, показателя рассеяния света в воде и концентрации в ней кислорода. Все упомянутые измерительные датчики и комплексные измерительные устройства размещены в герметичном контейнере, который жестко прикреплен к носу судна ниже его ватерлинии с помощью электромагнита (или постоянного магнита) и к которому прикреплен страховочный трос, второй конец которого закреплен на борту судна, и соединен с устройством считывания первичных данных многожильным герметичным электрическим кабелем. Второй набор измерительных датчиков и комплексных измерительных устройств содержит измерительные датчики температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измеритель флюоресценции фитопланктона и растворенного (желтого) органического вещества, измеритель радиационной температуры морской поверхности (радиометр) и измеритель спектральных яркости неба, яркости моря и облученности морской поверхности солнечным излучением. Все упомянутые измерительные датчики и комплексные измерительные устройства, входящие в состав второго набора, расположены на носовой части судна над водой таким образом, чтобы в поле зрения измерителя спектральной яркости моря не попадало отраженное от морской поверхности рассеянное бортом носовой части судна солнечное излучение, и соединены с помощью электрического кабеля с устройством считывания первичных данных. Третий набор измерительных датчиков и комплексных измерительных устройств содержит измеритель спектрального показателя ослабления света морской воды, измеритель флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла, каротиноидов, феофитина, растворенного (желтого) органического вещества, углерода. Все упомянутые датчики и комплексные измерительные устройства, входящие в состав третьего набора, расположены на борту судна (в судовой лаборатории) и соединены с помощью электрического кабеля с устройством считывания первичных данных, а с помощью водопровода - с устройством забора забортной морской воды.
Повышение информативности измерений и точности определения и построения пространственного распределения океанографических характеристик исследуемых акваторий в заявляемом изобретении достигается за счет осуществления автоматизированных синхронных измерений в реальном времени с помощью трех наборов измерительных датчиков и комплексных измерительных устройств, установленных на судне, и измерительных датчиков и комплексных измерительных устройств, расположенных на искусственном спутнике Земли, и за счет запоминания результатов измерений в моменты совпадения координат судна и координат луча сканирования поверхности океана измерительными датчиками искусственного спутника Земли, при этом предлагаемое устройство позволяет проводить измерения гидрофизических и других океанологических характеристик в невозмущенной корпусом движущегося судна водной среде и над невозмущенной корпусом судна водной поверхностью.
Более низкая по сравнению с ближайшим аналогом стоимость заявляемых способа и системы достигается за счет того, что заявляемые способ и система могут эксплуатироваться на любых судах, например рыболовецких, причем преимущественно на ходу судна и обслуживаться персоналом, имеющим относительно невысокую квалификацию. Более того, внедрив в практику океанологических исследований заявляемое изобретение, можно увеличить число одновременно эксплуатируемых судов, не увеличивая финансовые средства, затрачиваемые в настоящее время для этих целей.
Заявляемое изобретение поясняется чертежом, на котором приведена функциональная схема заявляемой системы.
Система определения и построения пространственного распределения океанографических характеристик состоит из первого набора измерительных датчиков и комплексных измерительных устройств 1, второго набора измерительных датчиков и комплексных измерительных устройств 2, третьего набора измерительных датчиков и комплексных измерительных устройств 3, устройства считывания первичных данных 4, устройства управления 5, устройства определения координат судна 6, устройства приема спутниковой информации 7, устройства определения координат луча сканирования водной поверхности искусственным спутником Земли 8, устройства хранения спутниковой информации 9, устройства памяти 10, устройства корректировки спутниковой информации и хранения океанографических полей 11. В состав первого набора измерительных датчиков и комплексных измерительных устройств 1 входят трехкоординатный измеритель изменения скорости воды и вибрации судна, датчики температуры, электропроводности и давления морской воды, концентрации кислорода и показателя рассеяния света в воде и устройство забора забортной морской воды 12. Все измерительные датчики и комплексные измерительные устройства, входящие в состав первого набора 1, и устройство забора забортной морской воды 12 размещены в контейнере, который жестко прикреплен к носовой части судна ниже его ватерлинии с помощью электромагнита (или постоянного магнита), и для повышения надежности его крепления используется страховочный трос, который одним своим концом прикреплен к контейнеру, содержащему набор 1, а вторым концом закреплен на борту судна. Все измерительные датчики и комплексные измерительные устройства, входящие в состав первого набора 1, соединены с устройством считывания первичных данных 4 многожильным герметичным электрическим кабелем 13. Устройство забора забортной морской воды 12 соединено с третьим набором измерительных датчиков и комплексных измерительных устройств 3 с помощью водопровода 14. При этом контейнер с первым набором измерительных датчиков и комплексных измерительных устройств 1 и устройством забора забортной морской воды 12 прикреплен к носовой части судна так, что упомянутые измерительные датчики и устройство забора забортной морской воды 12 находятся в невозмущенной корпусом движущегося судна водной среде, а входное отверстие устройства забора забортной морской воды 12 направлено в сторону движения судна (по ходу судна).
В состав второго набора измерительных датчиков и комплексных измерительных устройств 2 входят датчики температуры, влажности и давления атмосферного воздуха, направления и скорости приводного ветра, измеритель флюоресценции фитопланктона и растворенного (желтого) органического вещества, измеритель радиационной температуры морской поверхности (радиометр) и измеритель спектральных яркости неба, яркости моря и облученности морской поверхности солнечным излучением. Второй набор измерительных датчиков и комплексных измерительных устройств 2 размещен на носовой части судна, расположенной над водой таким образом, чтобы в поле зрения измерителя спектральной яркости моря не попадало отраженное от морской поверхности рассеянное бортом носовой части судна солнечное излучение. Каждый из датчиков, входящих в состав второго набора измерительных датчиков и комплексных измерительных устройств 2, соединен с помощью электрического многожильного кабеля 15 с устройством считывания первичных данных 4.
В состав третьего набора измерительных датчиков и комплексных измерительных устройств 3 входят измеритель спектрального показателя ослабления света морской воды, измеритель флюоресценции хлорофилла фитопланктона и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла и растворенного (желтого) органического вещества, измеритель концентрации хлорофилла, каротиноидов, феофитина, растворенного (желтого) органического вещества, углерода. Третий набор измерительных датчиков и комплексных измерительных устройств 3 размещен на борту судна в судовой лаборатории. Каждый из датчиков и комплексных измерительных устройств, входящих в третий набор 3, соединен с помощью электрического многожильного кабеля 16 с устройством считывания первичных данных 4.
Устройство считывания первичных данных 4 соединено с устройством управления 5. Устройства управления 5 соединено с устройством определения координат судна 6, например навигационным прибором "GPS" и с устройством определения координат луча сканирования водной поверхности искусственным спутником Земли 8. Устройство определения координат луча сканирования водной поверхности искусственным спутником Земли 8 соединено с устройством приема спутниковой информации 7, которое соединено с устройством хранения спутниковой информации 9, соединенным с устройством корректировки спутниковой информации и хранения океанографических полей 11. Устройство корректировки спутниковой информации и хранения океанографических полей 11 соединено с устройством памяти 10, соединенным с устройством считывания первичных данных 4.
Система работает следующим образом.
Показания измерительных датчиков и комплексных измерительных устройств, входящих в состав первого 1, второго 2 и третьего 3 наборов измерительных датчиков и комплексных измерительных устройств, автоматически в режиме реального времени считываются в устройство считывания первичных данных 4, в котором эти данные хранятся и периодически обновляются. При этом каждому измерительному датчику и комплексному измерительному устройству, входящему в первый 1, второй 2 и третий 3 наборы измерительных датчиков и комплексных измерительных устройств, соответствует свой адрес в устройстве считывания первичных данных 4. В процессе выполнения измерений на ходу судна в третий набор измерительных датчиков 3 из устройства забора забортной воды 12, расположенного в контейнере вместе с первым набором измерительных датчиков и комплексных измерительных устройств 1, автоматически постоянно на ходу судна по водопроводу 14 поступает забортная морская вода, которая используется измерительными датчиками и комплексными измерительными устройствами, входящими в третий набор 3, для анализа содержания в ней различных веществ. Сведения о месте нахождения судна поступают из устройства определения координат судна 6 в устройство управления 5, в которое одновременно из устройства определения координат луча сканирования искусственным спутником Земли 8 поступает информация о координатах луча сканирования водной поверхности измерительными датчиками и комплексными измерительными устройствами искусственного спутника Земли. Координаты луча сканирования определяются следующим образом. В устройстве определения координат луча сканирования искусственным спутником Земли 8 хранятся данные о параметрах движения искусственных спутников Земли. В момент времени, когда сигнал, передаваемый со спутника, попадает в область уверенного приема спутникового сигнала устройством приема спутниковой информации 7, расположенным на судне, из устройства приема спутниковой информации 7 в устройство определения координат луча сканирования искусственным спутником Земли 8 поступают сигналы, соответствующие началу приема каждой строки сканирования. В устройстве определения координат луча сканирования искусственным спутником Земли 8 на основании этих данных и параметров движения искусственных спутников Земли автоматически для каждого момента времени определяются координаты луча сканирования водной поверхности Земли, которые затем и поступают в устройство управления 5. Одновременно, начиная с момента начала приема, в устройство хранения спутниковой информации 9 поступают данные из устройства приема спутниковой информации 7. В устройстве управления 5 упомянутые координаты сравниваются и, в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств спутника и устройства определения координат судна 6, из устройства управления 5 в устройство считывания первичных данных 4 автоматически передаются упомянутые координаты и команда, по которой данные, соответствующие показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав первого 1, второго 2 и третьего 3 наборов, считываются из устройства считывания первичных данных 4 и записываются в устройство памяти 10 по адресам, соответствующим номерам измерительных датчиков и комплексных измерительных устройств, в которое одновременно записываются совпавшие координаты судна и координаты луча сканирования водной поверхности измерительными датчиками и комплексными измерительными устройствами искусственного спутника Земли. Затем эти данные передаются в устройство корректировки спутниковой информации и хранения океанографических характеристик 11, в которое также из устройства приема спутниковой информации 7 поступает спутниковая информация и соответствующие каждому пикселю координаты луча сканирования водной поверхности Земли, в которое в свою очередь из устройства определения координат луча сканирования искусственным спутником Земли 8 поступают текущие значения координат луча сканирования. В устройстве корректировки спутниковой информации и хранения океанографических характеристик 11 сопоставляются спутниковые данные и результаты измерений, полученные измерительными датчиками и комплексными измерительными устройствами, входящими в состав первого 1, второго 2 и третьего 3 наборов, в момент совпадения координат судна и луча сканирования. По результатам сопоставления определяются градуировочные коэффициенты, которые используются для корректировки полученной со спутника информации. По специальным алгоритмам и математическим программам с учетом гидрометеорологических условий проведения подспутниковых измерений и параметров атмосферы производится автоматическая корректировка спутниковой информации в отношении каждого пикселя для всех пикселей, составляющих спутниковую информацию, по которым определяются океанографические характеристики и строятся их пространственные распределения (океанографические поля). Устройство памяти 10, устройство хранения спутниковой информации 9, устройство управления 5, устройство определения координат луча сканирования искусственным спутником Земли 8, устройство корректировки спутниковой информации и хранения океанографических характеристик 11 могут быть реализованы на базе стандартной ЭВМ.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК | 2014 |
|
RU2556289C1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ И ПОСТРОЕНИЯ ПРОСТРАНСТВЕННОГО РАСПРЕДЕЛЕНИЯ ОКЕАНОГРАФИЧЕСКИХ ХАРАКТЕРИСТИК И СИСТЕМА ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2014 |
|
RU2559338C1 |
| Способ получения результатов измерений в ходе сканирования скрытых или открытых объектов | 2018 |
|
RU2706456C1 |
| Морское патрульное судно для экологического контроля территориальных вод, континентального шельфа и исключительной экономической зоны | 2015 |
|
RU2610156C1 |
| НАВИГАЦИОННЫЙ КОМПЛЕКС | 2012 |
|
RU2483280C1 |
| ГИДРОАКУСТИЧЕСКИЙ ЛОКАЦИОННЫЙ КОМПЛЕКС | 2010 |
|
RU2426149C1 |
| СПОСОБ ОСЛАБЛЕНИЯ ТРОПИЧЕСКИХ ЦИКЛОНОВ (УРАГАНОВ, ТАЙФУНОВ) | 1999 |
|
RU2150134C1 |
| БУЙ ДЛЯ ОПРЕДЕЛЕНИЯ ХАРАКТЕРИСТИК МОРСКИХ ВЕТРОВЫХ ВОЛН | 2011 |
|
RU2490679C1 |
| СПОСОБ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН И УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ТОЛЩИНЫ ЛЬДИН | 2010 |
|
RU2435136C1 |
| СПОСОБ СЪЕМКИ РЕЛЬЕФА ДНА АКВАТОРИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2434246C1 |
Изобретение относится к определению океанографических характеристик и построению их пространственного распределения и может быть использовано для географических и природоресурсных исследований океанов и морей. Указанная задача решается за счет того, что способ определения и построения пространственного распределения океанографических характеристик, заключающийся в том, что с помощью измерительных датчиков и комплексных измерительных устройств производят комплексные подспутниковые (судовые) и спутниковые измерения океанографических характеристик, при этом результаты подспутниковых и спутниковых измерений сохраняют в устройстве памяти и по показаниям измерительных датчиков и комплексных измерительных устройств корректируют спутниковые данные, по которым определяют и строят пространственные распределения океанографических характеристик исследуемых акваторий, дополнен тем, что первый набор измерительных датчиков и комплексных измерительных устройств погружают в воду, второй набор измерительных датчиков и комплексных измерительных устройств размещают на носовой части судна, расположенной над водой, третий набор измерительных датчиков и комплексных измерительных устройств размещают на борту судна, в режиме реального времени считывают и записывают показания измерительных датчиков и комплексных измерительных устройств, входящих в состав первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, в устройство считывания первичных данных, в котором эти показания периодически обновляют. Технический результат реализации данного изобретения - повышение информативности измерений и точности определения и построения пространственного распределения океанографических характеристик исследуемых акваторий, а также снижение стоимости способа и системы для его реализации. 2 с. и 17 з.п. ф-лы, 1 ил.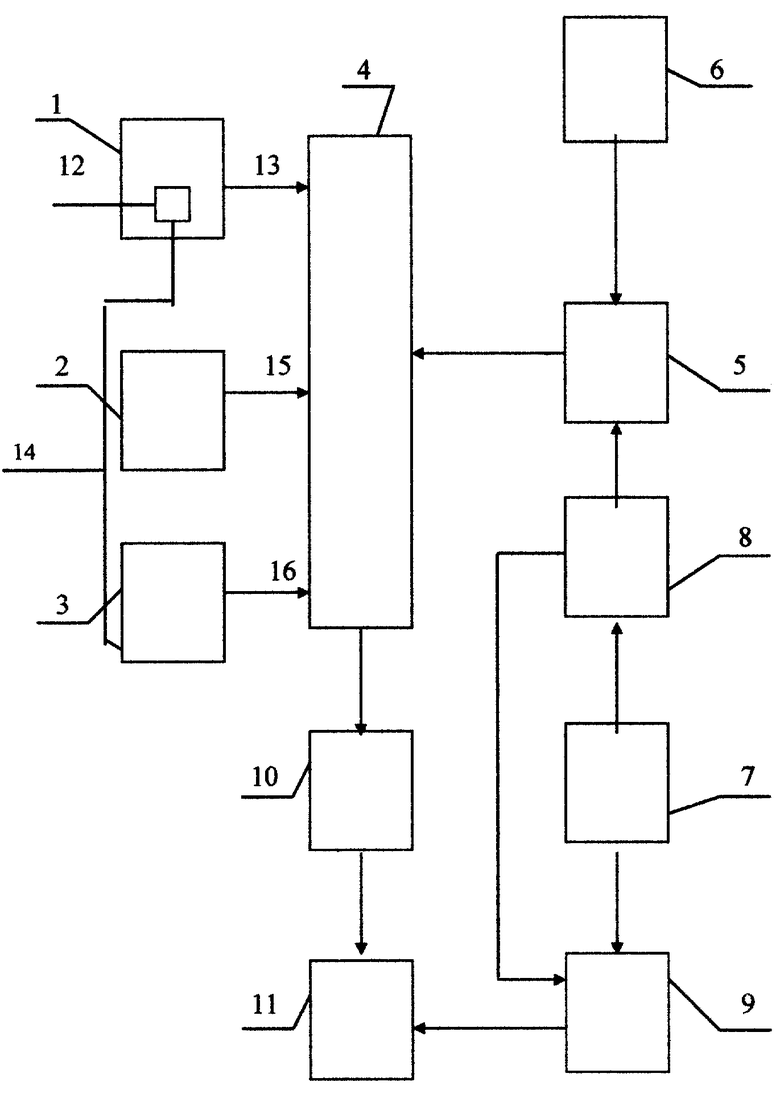
датчиков и комплексных измерительных устройств размещают на борту судна, в режиме реального времени считывают и записывают показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, в устройство считывания первичных данных, в котором показания упомянутых измерительных датчиков и комплексных измерительных устройств в процессе непрерывных измерений периодически обновляются, с искусственного спутника Земли принимают данные дистанционного зондирования водной поверхности, считывают координаты судна из устройства определения координат судна, из устройства определения координат луча сканирования водной поверхности искусственным спутником Земли считывают координаты луча сканирования водной поверхности, сравнивают их с упомянутыми координатами судна и в случае их совпадения в пределах пространственной разрешающей способности измерительных датчиков и комплексных измерительных устройств упомянутого искусственного спутника Земли и устройства определения координат судна из упомянутого устройства считывания первичных данных считывают в упомянутое устройство памяти и запоминают соответствующие упомянутым
координатам показания упомянутых измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов измерительных датчиков и комплексных измерительных устройств, и соответствующие значения упомянутых координат, регистрируют данные дистанционного зондирования водной поверхности искусственным спутником Земли, определяют градуировочные коэффициенты и по упомянутым показаниям измерительных датчиков и комплексных измерительных устройств, входящих в состав упомянутых первого, второго и третьего наборов датчиков и комплексных измерительных устройств, полученным при совпадении координат судна и координат луча сканирования водной поверхности, корректируют упомянутую спутниковую информацию.
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| US 5209112 A, 11.05.1993 | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Радикальный зажим заготовки электровысадочной машины | 1976 |
|
SU570443A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Устройство для измерения параметров морской среды | 1981 |
|
SU951073A1 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Устройство для океанологических исследований | 1990 |
|
SU1760321A1 |

