Область техники
Заявляемое техническое решение относится к беспроводным сенсорным сетям (БСС), в частности к способам управления функционированием БСС для эффективной обработки данных множества датчиков и исполнительных устройств, расположенных на расстоянии друг от друга в местах, где проводная связь невозможна или нежелательна. Например, это такие сложные технические объекты, как технологические процессы, "умный дом", "умный автомобиль", системы слежения и обеспечения безопасности, ограничение несанкционированного доступа на предприятиях и на транспорте, в медицине.
Уровень техники
Из уровня техники известно, что топология с децентрализованным управлением характеризуется тем, что каждое устройство может взаимодействовать с другим устройством на расстоянии, на котором возможно произвести обмен при помощи приемопередающего устройства. Примером применения данного вида топологий может служить структура сети в виде кластерного дерева (например, см. Waltenegus Dargie, Christian Poelabauer. Fundamentals of Wireless Sensor Networks Theory and Practice. - Wiley Series on Wireless Communications and Mobile Computing, John Wiley & Sons Ltd, 2010. - PP. 1-90, PP. 295-300).
Известен способ организации беспроводной сенсорной сети, описанный в патентной заявке США №2006178156, МПК H04W 40/08; H04W 40/24; H04W 84/18, опубликованной 10.08.2006 г. («Routing method in a wireless sensor network»). Данный способ маршрутизации используется для беспроводных сенсорных сетей, где датчики-узлы группируются в ячейки. При обнаружении информации, которую необходимо передать в пункт назначения, датчик определяет, является ли расстояние до узла ячейки, в которую необходимо передать информацию, равным единичному шагу. Если ячейка назначения расположена не на расстоянии единичного шага, датчик-узел выбирает ячейки, установленные ближе к месту назначения, из доступных соседних клеток. Из доступных ячеек он выбирает ячейку в соответствии с плотностью энергии в данной области ячеек, и передает измеренную информацию главному узлу через вспомогательный узел. Способ позволяет передать данные от сенсорного узла до конечно устройства с наименьшими затратами энергии, что является важным для беспроводных устройств, работающих от автономных источников энергии.
Однако недостатком этого способа является то, что при использовании большого количества узлов возрастает нагрузка на сеть, что приводит к уменьшению скорости работы сети и скорости получения итоговых данных об измеряемых параметрах контролируемого объекта на конечное устройство. Данный способ также не предусматривает перенастройки параметров работы сети.
Известен также способ организации беспроводных сенсорных сетей с планировщиком задач, описанный в патенте США №7979098, МПК Н04В 1/00, опубликованном 12.07.2011 г. («Receiver scheduling in ad hoc wireless networks»). Согласно данному способу беспроводная сеть включает в себя сенсорные узлы связи. Сенсорные узлы связи настроены на периодическое генерирование и передачу данных. Каждый пакет данных принимается в определенные временные промежутки, в которых функционируют сенсорные узлы связи. Таким образом, формируется подобие системы с обработкой прерывания в реальном времени. Если пакет данных не был обработан в заданный промежуток времени, то производиться составление очереди пакетов данных, которые необходимо обработать. Данный способ частично решает проблему получения данных с наивысшим приоритетом в первую очередь. Также возможно задать скорость и периодичность получения приоритетных данных.
Однако недостатком данного способа является то, что он не обеспечивает энергосберегающей и эффективной работы беспроводной сенсорной сети в плане электропотребления и скорости работы. Кроме того, при увеличении масштабов топологии данная сеть будет иметь низкие скорости приема и передачи данных и их обработки.
Наиболее близким техническим решением к предлагаемому изобретению является способ организации беспроводной сенсорной сети, представленный в патенте США №8112035, МПК Н04В 7/00, опубликованном 07.02.2012 г. («Sensor Device, Sensor Network System, and Sensor Device Control Method»). В данном изобретении описывается способ функционирования сети, согласно которому можно производить анализ зашумленности каналов. Сенсорное устройство сетевой системы содержит считыватель (ридер) для запросов меток информации и обнаружения помех в каналах, а также беспроводный модуль передачи или приема информации зашумленности каналов через приемник короткого диапазона, связанный с разделением помех в канале информации. Ридер считывает запросы метки информации и определяет помеху в канале совместно с беспроводным модулем передачи или приема информации зашумленности каналов. Несколько таких сенсорных устройств составляют кластер, связанный с координирующим модулем через так называемый маршрутизатор. Алгоритм определения и распространения информации о зашумленности каналов позволяет выбрать доступные свободные каналы любому из сенсорных устройств, что увеличивает скорость передачи данных.
Однако недостатком данного способа является то, что он предполагает обязательное наличие дополнительных временных промежутков для анализа зашумленности каналов и не предусматривает решения проблемы обработки большого количества информации и, соответственно, уменьшения скорости работы беспроводной сенсорной сети.
Раскрытие изобретения
Задачей предлагаемого изобретения является повышение производительности и точности функционирования БСС, а также обеспечение экономного расхода энергии.
Техническим результатом является улучшение производительности и точности функционирования БСС, а также снижение энергетических затрат при функционировании БСС.
Технический результат достигается за счет того, что предложен способ управления функционированием беспроводной сенсорной сети (БСС), заключающийся в том, что обеспечивают кластерную архитектуру БСС, инициализируют БСС, задают параметры БСС, при этом параметры БСС включают контролируемые параметры, производят анализ уровня зашумленности каналов, количество сенсорных узлов БСС выбирают пропорционально требуемым параметрам точности обработки и точности передачи контролируемых параметров, при этом активируют только те сенсорные узлы БСС, в которых текущими значениями контролируемых параметров были превышены значения, заранее заданные в виде допусков, после чего в БСС формируют связи между активированными сенсорными узлами БСС, выбирают канал передачи данных на основе анализа результатов функционирования БСС, при этом анализ результатов функционирования БСС осуществляют с помощью генетического алгоритма. Кластерная архитектура БСС обеспечена с помощью сетки связанных между собой сенсорных узлов БСС.
Техническая сущность заявляемого решения заключается в том, что способ управления функционированием беспроводной сенсорной сети (БСС) заключается в том, что формируют единичную сетку с заданным шагом, которая рассчитана на наибольшую необходимую точность контролируемого параметра получаемых данных. Благодаря активации только тех сетевых элементов (сенсорных узлов БСС), которые обеспечивают получение информации, и за счет участия интеллектуальных модулей на основе нейронной сети в функционирования БСС происходит точное и быстрое измерение контролируемых параметров получаемых данных. Интеллектуальные модули функционируют на основе генетического алгоритма и организуют работу сети с учетом анализа предыдущих вариантов организации топологий БСС в сопоставлении с параметрами БСС. Как отмечается в работе Гладков Л.А., Курейчик В.В., Курейчик В.М. Генетические алгоритмы. / Под ред. В.М. Курейчика. - 2 изд. испр. и доп. М.: ФИЗМАТЛИТ, 2006. - 320 с., генетический алгоритм представляет собой адаптивный поисковый метод, основанный на селекции лучших элементов в популяции. Основой для возникновения генетических алгоритмов послужили модель биологической эволюции и методы случайного поиска. Отмечается, что случайный поиск возник как реализация простейшей модели эволюции, когда случайные мутации моделировались случайными шагами оптимального решения, а отбор - «устранением» неудачных вариантов. Эволюционный поиск с точки зрения преобразования информации - это последовательное преобразование одного конечного нечеткого множества промежуточных решений в другое. Само преобразование можно назвать алгоритмом поиска, или генетическим алгоритмом. Генетические алгоритмы - это не просто случайный поиск. Они эффективно используют информацию, накопленную в процессе эволюции.
Цель генетических алгоритмов состоит в том, чтобы:
- абстрактно и формально объяснять адаптацию процессов в естественной системе и интеллектуальной исследовательской системе;
- моделировать естественные эволюционные процессы для эффективного решения оптимизационных задач науки и техники.
В настоящее время используется новая парадигма решений оптимизационных задач на основе генетических алгоритмов и их различных модификаций. Генетические алгоритмы осуществляют поиск баланса между эффективностью и качеством решений за счет «выживания сильнейших альтернативных решений» в неопределенных и нечетких условиях.
Генетические алгоритмы отличаются от других оптимизационных и поисковых процедур следующим:
- работают в основном не с параметрами задачи, а с закодированным множеством параметров;
- осуществляют поиск не путем улучшения одного решения, а путем использования сразу нескольких альтернатив на заданном множестве решений;
- используют целевую функцию, а не ее различные приращения для оценки качества принятия решений;
- применяют не детерминированные, а вероятностные правила анализа оптимизационных задач.
Для работы генетических алгоритмов выбирают множество натуральных параметров оптимизационной проблемы и кодируют их в последовательность конечной длины в некотором алфавите. Они работают до тех пор, пока не будет выполнено заданное число генераций (итераций алгоритма), или на некоторой генерации будет получено решение определенного качества, или когда найден локальный оптимум, т.е. возникла преждевременная сходимость и алгоритм не может найти выход из этого состояния. В отличие от других методов оптимизации эти алгоритмы, как правило, анализируют различные области пространства решений одновременно, и поэтому они более приспособлены к нахождению новых областей с лучшими значениями целевой функции.
В соответствии с принципом работы генетического алгоритма при построении нейронной сети решается вопрос выбора архитектуры сети и ее "обучения", который заключается в подборе весов для узлов этой сети. Выбираются типы узлов (нейронов), их входы и передаточные функции, определяется характер соединения их между собой. Устанавливается также, что принять в качестве входов и выходов нейронной сети. Опыт "обучения" в разных режимах работы скоростной сенсорной сети и накапливается в интеллектуальных модулях в виде соответствующего программного обеспечения, обеспечивающего управление режимами функционирования структуры описываемой сенсорной сети.
Краткое описание фигур
На фигурах, поясняющих предлагаемое техническое решение, представлены:
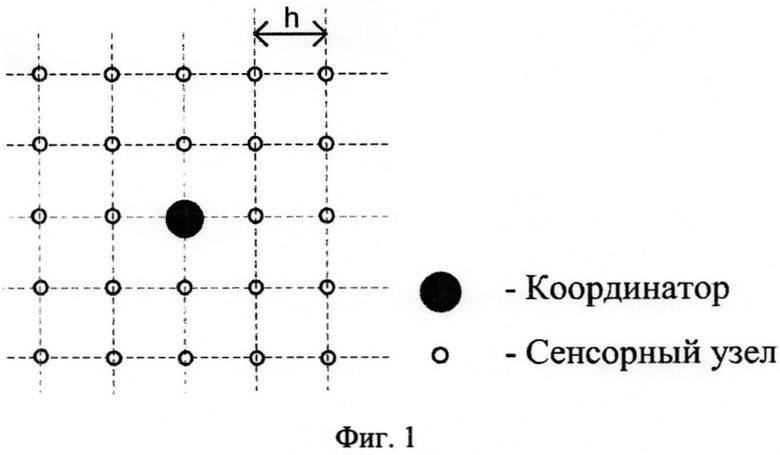
Фиг.1 - Пример топологии беспроводной сенсорной сети с единичной сеткой
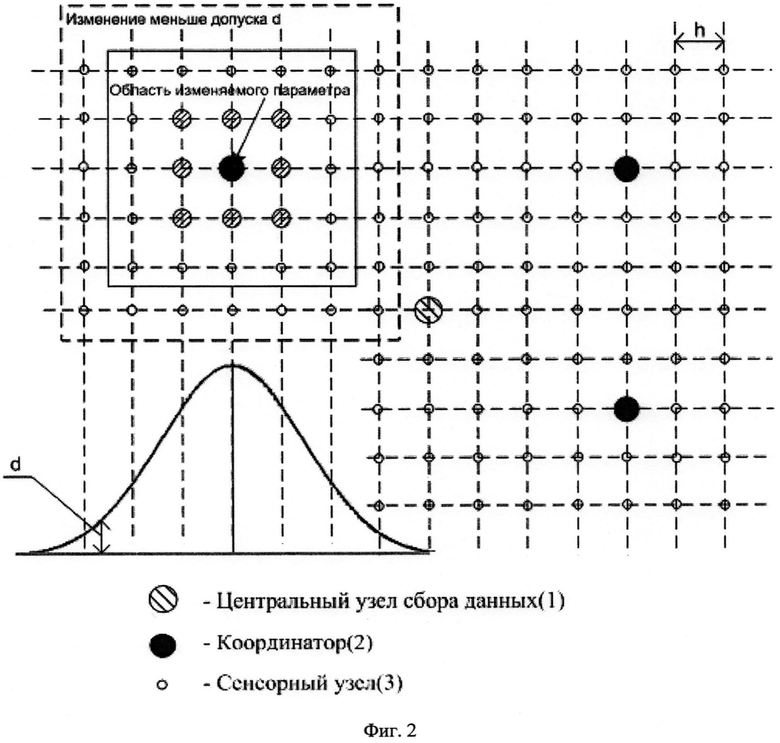
Фиг.2 - Результат работы сети при изменении контролируемого параметра
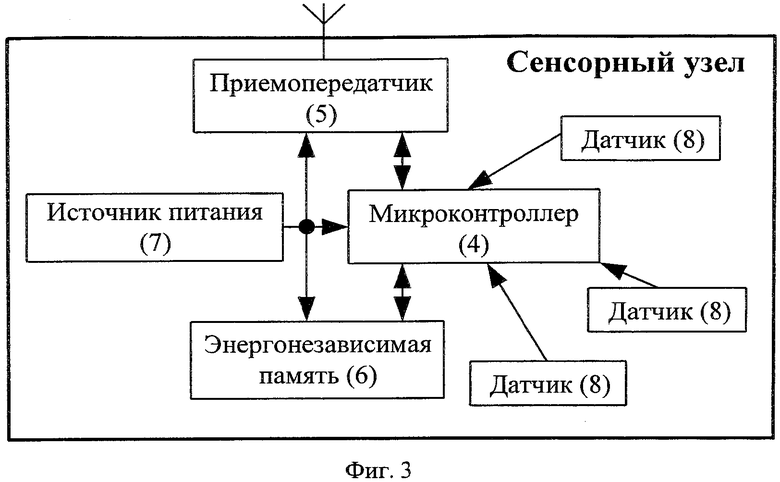
Фиг.3 - Структура сенсорного узла
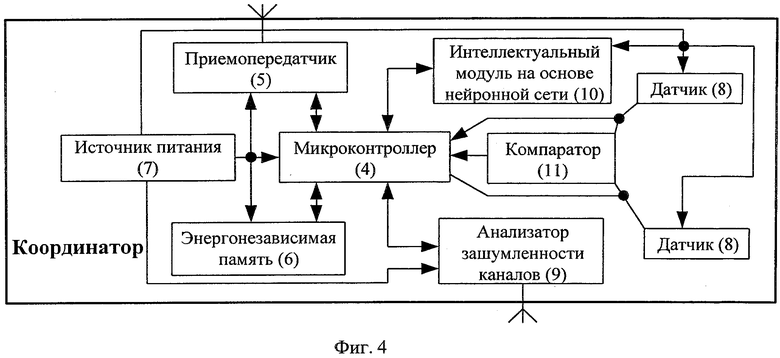
Фиг.4 - Структура координатора беспроводной сенсорной сети
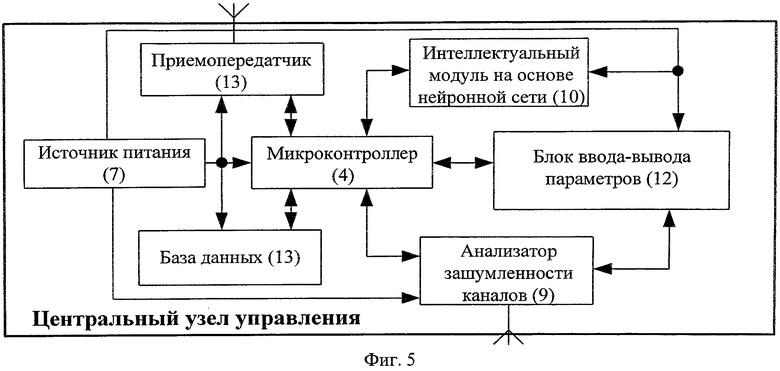
Фиг.5 - Структура центрального узла сбора данных беспроводной сенсорной сети
Фиг.6 - Обобщенный алгоритм настройки беспроводной сенсорной сети
Осуществление изобретения
Возможность получения точной и детальной информации (в любой позиции и в любой момент времени) ассоциируется с увеличением количества узлов БСС. Увеличение же количества узлов ведет к увеличению объема информации, которую необходимо передать, и к сложности организации маршрута передачи. Это сказывается в итоге на скорости работы БСС и приводит к рассогласованию и запаздыванию информации.
Чтобы обеспечить точность получаемой информации при больших объемах и скорости передачи, применено понятие - сетка связанных между собой узлов с заданным шагом h, где h - расстояние между сенсорными узлами в сетке. Пример топологии БСС с единичной сеткой представлен на фиг.1. В данной топологии заранее рассчитываются единичные шаги h, которые необходимы для обеспечения режима заданной точности измеряемого параметра. Также из соотношения площади контролируемой территории и шагов единичной сетки можно рассчитать необходимое количество сенсорных узлов для обеспечения заданной точности.
Если измеряемый параметр находится в пределах нормы или не меняется, то узлы находятся в спящем состоянии и потребляют небольшое количество энергии, а также не увеличивают объем передаваемой информации. Предположим, в локальной зоне произошло изменение контролируемого параметра. Результат работы сети при изменении контролируемого параметра представлен на фиг.2.
Например, пусть в зоне ответственности одного из координаторов произошло изменение контролируемого параметра по нормальному закону в пространстве. В результате активированными для передачи информации будет только определенное число узлов, у которых отклонение контролируемого значения Δd превысило параметр погрешности d, изначально заданный пользователем, т.е. Δd>d.
В описанном варианте способа функционирования БСС и обуславливающем его способе построения топологии удалось совместить требования по требуемой точности измерений и высокой скорости получения информации за счет динамичного изменения точности. Заданием определенного значения x можно контролировать разрешающую способность сети.
Кроме того, для интеллектуальной настройки сети использован принцип обратной связи, в состав координаторов входят интеллектуальные модули по настройке беспроводной сенсорной сети. Такие интеллектуальные модули работают на основе нейронной сети, которая анализирует предыдущие результаты работы по времени определенных сенсорных структур, сопоставляет их, например, с зашумленностью каналов и с накоплением статистических данных и делает вывод о наиболее выгодном варианте построения беспроводной сенсорной сети.
Большая скорость передачи с высокой точностью обеспечивается также использованием принципа вынесения - путем создания приоритета. Для этого в БСС формируются особо ответственные контролируемые участки, которые имеют приоритет по получению данных. В таком случае информация об изменении измеряемого параметра в особо ответственной зоне будет выше, чем в других зонах с меньшим приоритетом.
В дополнение к описанному, высокая производительность и точность функционирования БСС обеспечивается дроблением пакетов данных на несколько частей. Возможна передача частей пакетов данных от сенсорных узлов по разным маршрутам. Например, имеется пакет данных А. Для быстроты его доставки в узел Х и уменьшения нагрузки на сеть пакет данных разбивается на части A1, A2, A3 и передается по разным маршрутам в узел X, где затем собирается в пакет А. Отправка частей пакета A1, A2, A3 происходит при помощи интеллектуального модуля.
Обозначим набор элементов, необходимых для построения данной топологии сети.
Структура сенсорного узла представлена на фиг.3. Управление сенсорного узла происходит от микроконтроллера (4). Координатор для связи с сенсорным узлом подает управляющие сигналы. Управляющий сигнал поступает на приемопередатчик (5). По сигналу от приемопередатчика (5) микроконтроллер выходит из состояния пониженного электропотребления и в зависимости от своего приоритета и других настроек, переданных от координатора, начинает считывание информации от датчиков (8), которые могут иметь различную номенклатуру. В зависимости от конфигурации микроконтроллер может записать полученные данные в энергонезависимую память (6) или передать через приемопередатчик координатору, который производил запрос. Питание сенсорных элементов узла (приемопередатчика, энергонезависимой памяти, микроконтроллера) осуществляется от источника питания (7).
Структура координатора БСС представлена на фиг.4. Управление координатора осуществляется от микроконтроллера (4). Микроконтроллер выходит из состояния ожидания при превышении сигнала с компаратора (11), который сравнивает значение d с уровнем сигнала с датчиков (8), если уровень превышен, то выдается сигнал для вывода микроконтроллера из режима пониженного потребления энергии. Далее микроконтроллер проводит анализ зашумленности каналов при помощи анализатора зашумленности каналов (9). На основе измеренных данных, анализа зашумленности каналов и необходимой точности и скорости получения сенсорной информации происходит конфигурация сети при помощи интеллектуального модуля на основе нейронной сети (10). Приемопередатчик осуществляет обмен информацией между сенсорными узлами (3) и координатором (2), координатором (2) и центральным узлом сбора данных (1). Энергонезависимая память (6) может быть использована для хранения информации для более эффективной работы интеллектуального модуля нейронной сети (10).
Структура центрального узла сбора данных (1) представлена на фиг.5. На центральный узел управления (1) передаются все данные, полученные с координаторов (2). Также при помощи главного узла управления (1) происходит первоначальная настройка беспроводной сенсорной сети, при помощи блока ввода-вывода информации (12) задаются параметры точности измерения, необходимой скорости получения данных, приоритетов участков данных и максимальные отклонения контролируемых параметров, при которых происходит активация сенсорной подсети. Данные от координаторов передаются и принимаются при помощи приемопередатчика (13) и хранятся в базе данных (13), накопление данных в котором необходимо для анализа скорости передачи информации по определенным маршрутам и каналам. Данные, которые необходимы для просмотра пользователем, могут быть выведены на блоке ввода-вывода информации (12). Способ функционирования данной сети соответствует схеме генетического алгоритма.
Приведем обобщенный алгоритм настройки БСС для измерения информации с высокой точностью с интеллектуальной настройкой. Обобщенный алгоритм настройки БСС представлен на фиг.6. Перед началом работы БСС для измерения информации с изменяемой точностью и с интеллектуальной настройкой необходимо провести инициализацию сети (100). Для этого необходимо задать параметры точности измеряемых параметров (101), скорости передачи и приоритетов получения информации при помощи блока ввода вывода (12). Далее необходимо измерить зашумленность каналов (102) и обратиться к модулю анализа информации на нейронной сети (103), после определяется наиболее подходящая конфигурация сети и происходит передача данных для инициализации координаторам сети (104), после чего координаторы переходят в состояния экономии электроэнергии (111). Координаторы остаются в спящем состоянии, пока не будет превышен уровень какого-либо типа из контролируемых параметров (112). После этого координатором измеряется зашумленность каналов (113) и происходит обращения к интеллектуальному модулю на основе нейронной сети (114), который производит подбор оптимальной структуры сети для получения наилучшего результата по соотношению скорость/точность. Далее происходит конфигурация сети (115) и передача полученных данных (116) на центральный узел управления. Если измеряемые данные продолжают изменяться, то указанная последовательность повторяется, пока изменение параметров не прекратится.
Пример варианта реализации способа.
Заявляемый способ может быть осуществлен путем выполнения последовательности операций, которые приведены ниже.
1) На первом шаге производят операцию установки необходимых устройств на свои позиции, а именно установка главного координатора в позицию, где будет производиться анализ измеряемых данных с учетом контролируемых объектов. Это установка координаторов рядом с объектом, изменение параметров которого требуется контролировать, установка на объект сенсорных узлов в соответствии с требуемыми расстояниями единичной сетки.
2) Осуществляют операцию ввода данных (точность данных, максимальное отклонение от нормального параметра, приоритет получаемых параметров от определенного координатора) для инициализации БСС с блока ввода-вывода на главном координаторе.
3) Запускают работу сенсорной сети.
4) В процессе работы может задаваться точность измеряемого параметра, например, заданием величины допуска. Данные об измеряемых параметрах заносятся в память на главном центральном узле и выводятся, например, при помощи блока ввода-вывода.
В результате проведения описанных операций будет сформирована функционирующая структура БСС, измеряющей параметры контролируемого объекта.
Функционирование БСС происходит в максимально экономном режиме расходования электроэнергии благодаря использованию только тех участков сети, где осуществляются необходимые изменения. Поддержание высокой скорости передачи приоритетных данных происходит за счет использования приемов добавления в очередь информации от устройств с более низким приоритетом, что позволяет достигать хороших результатов в соотношении скорость/приоритет.
Преимуществом заявляемого технического решения является то, что заявленная совокупность признаков способа обеспечивает активирование только тех элементов БСС, которые необходимы для получения информации, и используются интеллектуальные модули на основе нейронной сети для анализа предыдущих вариантов работы организованных топологий сетей в сопоставлении с параметрами БСС.
Благодаря приведенной выше совокупности операций происходит не только точное и быстрое измерение необходимых данных, но и экономия электроэнергии за счет использования только тех участков сети, где происходят изменения
К достоинствам заявляемого технического решения можно отнести также возможность оперативного задания точности контролируемых или измеряемых параметров во время работы БСС. В результате могут быть получены данные с какой угодно высокой точностью. Если высокая точность не требуется, то можно существенно снизить использование электроэнергии сенсорной сетью за счет снижения соответствующих параметров точности.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ НЕЙРОСЕТЕВОЙ КЛАСТЕРИЗАЦИИ ПРОСТРАНСТВЕННО-РАСПРЕДЕЛЕННОЙ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2024 |
|
RU2836294C1 |
| Система выявления и контроля зон изменения напряженно-деформированного состояния строительных конструкций | 2019 |
|
RU2747160C2 |
| СИСТЕМА МОНИТОРИНГА ПОТЕНЦИАЛЬНО ОПАСНЫХ ОБЪЕКТОВ ИНФРАСТРУКТУРЫ ЖЕЛЕЗНОДОРОЖНОГО ТРАНСПОРТА | 2011 |
|
RU2450346C1 |
| СПОСОБ РАСПРЕДЕЛЕННОЙ БАЛАНСИРОВКИ ТРАФИКА В БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2013 |
|
RU2528415C1 |
| СПОСОБ НЕЙРОСЕТЕВОЙ КЛАСТЕРИЗАЦИИ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2014 |
|
RU2571541C1 |
| Способ сбора телеметрической информации о состоянии объектов РКТ при транспортировании с помощью беспроводной сенсорной сети ZigBee | 2018 |
|
RU2708796C2 |
| СПОСОБ ИНТЕЛЛЕКТУАЛЬНОГО МОНИТОРИНГА СОСТОЯНИЯ ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2024 |
|
RU2841123C1 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ КОНТРОЛЯ И УПРАВЛЕНИЯ СОСТОЯНИЕМ ИСКУССТВЕННЫХ СООРУЖЕНИЙ | 2010 |
|
RU2434300C1 |
| СПОСОБ БЕСПРОВОДНОГО ИНТЕЛЛЕКТУАЛЬНОГО УПРАВЛЕНИЯ ОСВЕЩЕНИЕМ, ЭЛЕКТРОПРИБОРАМИ И ИНТЕЛЛЕКТУАЛЬНЫМИ СИСТЕМАМИ И ПРОГРАММНО-АППАРАТНЫЙ КОМПЛЕКС CONTROL-R ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2019 |
|
RU2752423C2 |
| СИСТЕМА ИНТЕЛЛЕКТУАЛЬНОГО МОНИТОРИНГА СОСТОЯНИЯ ИНФОРМАЦИОННО-ТЕЛЕКОММУНИКАЦИОННОЙ СЕТИ | 2024 |
|
RU2841117C1 |
Изобретение относится к области беспроводных сенсорных сетей (БСС). Техническим результатом является повышение производительности и точности функционирования беспроводной сенсорной сети (БСС), а также обеспечение экономного расхода энергии. Способ управления функционированием БСС заключается в том, что обеспечивают кластерную архитектуру БСС, инициализируют БСС, задают параметры БСС, при этом параметры БСС включают контролируемые параметры, производят анализ уровня зашумленности каналов, при этом количество сенсорных узлов БСС выбирают пропорционально требуемым параметрам точности обработки и точности передачи контролируемых параметров, при этом активируют только те сенсорные узлы БСС, в которых текущими значениями контролируемых параметров были превышены значения, заранее заданные в виде допусков, после чего в БСС формируют связи между активированными сенсорными узлами БСС, на основе анализа результатов функционирования БСС производят подбор оптимальной структуры сети для получения наилучшего результата по соотношению скорость/точность, выполняемый интеллектуальным модулем на основе нейронной сети, который функционирует на основе генетического алгоритма. 1 з.п. ф-лы, 6 ил.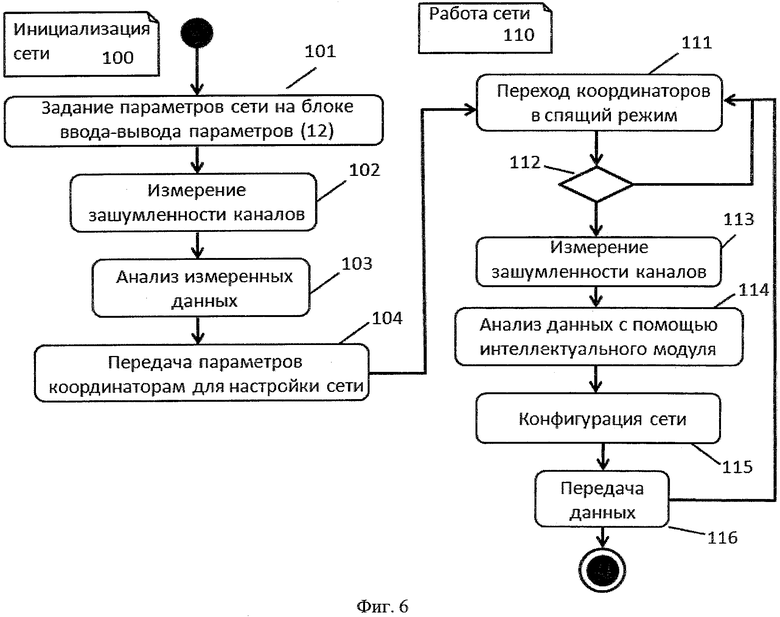
1. Способ управления функционированием беспроводной сенсорной сети (БСС), заключающийся в том, что обеспечивают кластерную архитектуру БСС, инициализируют БСС, задают параметры БСС, при этом параметры БСС включают контролируемые параметры, производят анализ уровня зашумленности каналов, отличающийся тем, что количество сенсорных узлов БСС выбирают пропорционально требуемым параметрам точности обработки и точности передачи контролируемых параметров, при этом активируют только те сенсорные узлы БСС, в которых текущими значениями контролируемых параметров были превышены значения, заранее заданные в виде допусков, после чего в БСС формируют связи между активированными сенсорными узлами БСС, на основе анализа результатов функционирования БСС производят подбор оптимальной структуры сети для получения наилучшего результата по соотношению скорость/точность, выполняемый интеллектуальным модулем на основе нейронной сети, который функционирует на основе генетического алгоритма.
2. Способ по п. 1, отличающийся тем, что кластерная архитектура БСС обеспечена с помощью сетки связанных между собой сенсорных узлов БСС.
| Колосоуборка | 1923 |
|
SU2009A1 |
| Способ приготовления лака | 1924 |
|
SU2011A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| CN 102238705 A, 09.11.2011 | |||
| CN 102238686 A, 09.11.2011 | |||
| Способ привязки газовых проявлений при газовом кароттаже скважин к истинным глубинам | 1951 |
|
SU117222A1 |
| СПОСОБ РАЗВЕРТЫВАНИЯ СЕНСОРНОЙ СЕТИ И САМОКОНФИГУРИРУЕМАЯ СЕНСОРНАЯ СЕТЬ | 2010 |
|
RU2439812C1 |

