Предложенное изобретение относится к средствам связи и удаленного управления измерительными и исполнительными устройствами.
В настоящее время известны и используются распределенные, самоорганизующиеся сети из множества датчиков и исполнительных устройств, объединенных между собой посредством каналов связи - сенсорные сети. Сенсорные сети, которые характеризуются относительно большим количеством узлов (датчиков (сенсоров), исполнительных устройств (актюаторов)), каждый из которых связан проводными или беспроводными линиями связи с одним или несколькими близлежащими узлами, то есть радиус действия линий связи существенно меньше, чем характерный размер территории покрытия сенсорной сети. Несмотря на то, что большинство сетей описанного выше типа включают как датчики, так и исполнительные устройства, то есть представляют собой сенсорно-актюаторную сеть, в настоящее время общеупотребимым является термин сенсорная сеть.
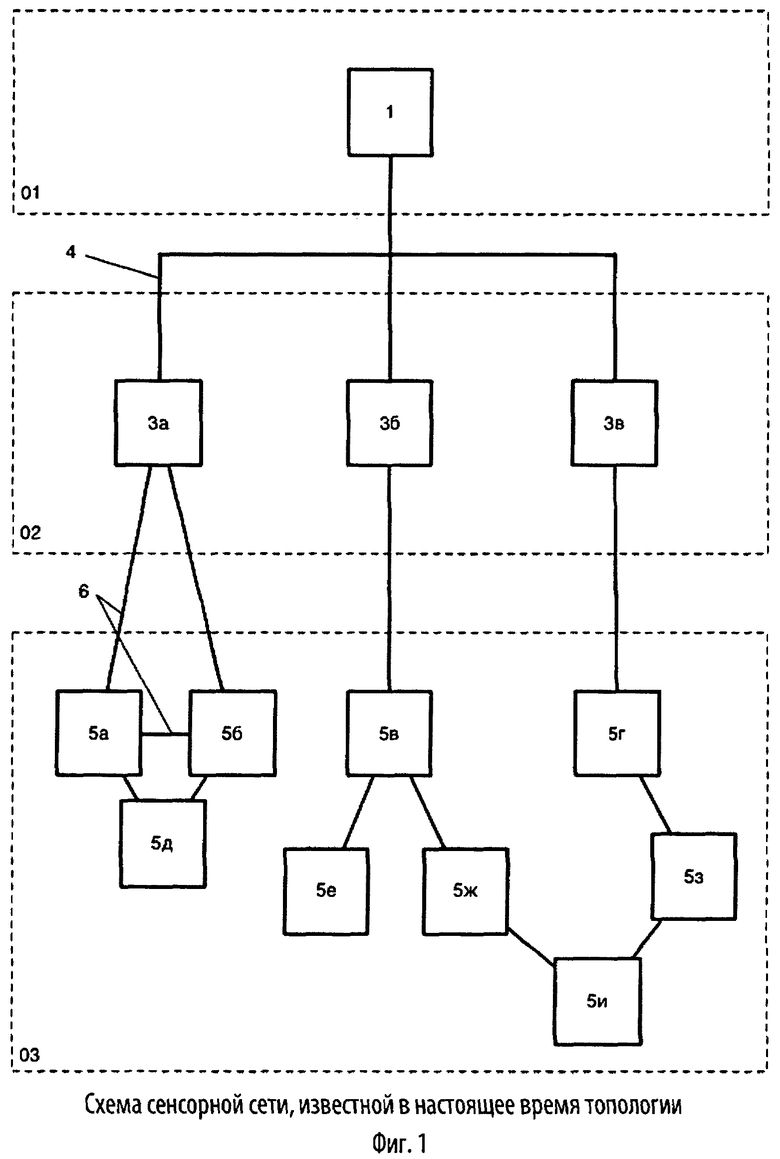
Большинство эксплуатируемых в настоящее время сенсорных сетей (фиг.1) построены по многоуровневой топологии. На первом уровне топологии 01 находится центральное устройство обработки данных 1. Центральное устройство обработки данных может включать средства связи с вторым уровнем топологии 02, процессоры или серверы, устройства пользовательского интерфейса разного уровня доступа (администраторы сети, пользователи сети и т.п.), запоминающее устройство (например, сервер системы управления базами данных). Центральное устройство обработки данных 1 располагают в удобном для пользователей месте, например в ситуационном центре или в офисе компании. Центральное устройство обработки данных 1 предназначено для сбора, обработки, хранения и отображения информации, полученной от сенсорной сети, а также для восприятия команд от пользователей и передачи команд управления и прочих сообщений узлам второго 02 и третьего 03 уровня топологии. На втором уровне топологии 02 находятся базовые станции 3а-3в, которые располагают на территории покрытия сенсорной сети. Базовые станции 3а-3в включают в себя средства связи с первым и третьим уровнями топологии, процессор и запоминающее устройство для обработки данных и программного управления. Базовые станции предназначены, главным образом, для маршрутизации сообщений и преобразования каналов связи между первым уровнем 01 топологии сенсорной сети и третьим уровнем 03 топологии. Например, канал связи 4 от центрального устройства обработки данных 1 до базовой станции 3а-3в может быть организован по протоколу GPRS через сеть мобильной связи стандарта GSM. Канал связи 6 от базовой станции 3а-3в до близлежащих узлов 5а-5и третьего уровня топологии 03 может быть организован по радиоканалу малого радиуса действия Zigbee. На третьем уровне топологии 03 сенсорной сети находятся узлы сенсорной сети 5а-5и. Каждый узел может включать набор датчиков и исполнительных механизмов для сбора информации и выполнения определенных действий, средства связи, микропроцессор, а также служить маршрутизатором для передачи сообщений другим узлам сети по каналам связи 6 и передачи сообщений от узлов 5а-5и сети на базовые станции 3а-3в.
Одной из существенных проблем создания и эксплуатации сенсорных сетей является адресация узлов и маршрутизация сообщений в сенсорных сетях (см., например, заявку на выдачу патента США US 20090210075). Обычно адрес каждого узла основывается на уникальном идентификаторе узла, задаваемом аппаратно при изготовлении узла или программно при развертывании сенсорной сети. В таких системах адресом узла является цепочка идентификаторов узлов, по которым должно пройти сообщение, чтобы достигнуть заданного узла. Адрес может включать идентификатор базовой станции, чтобы однозначно определить маршрут передачи сообщения от центрального устройства передачи данных. В узлах сенсорной сети обычно хранят таблицы маршрутизации, т.е. списки идентификаторов узлов, непосредственно связанных с данным узлом, и, возможно, списки идентификаторов тех узлов, с которыми связаны узлы, непосредственно связанные с данным узлом.
Известные в технике способы самоорганизации сенсорных сетей, направленные на решение указанной выше проблемы, представляют собой разнообразные комбинации способов составления таблиц маршрутизации и способов присоединения новых узлов к существующим сетям. Необходимость хранения таблиц маршрутизации в каждом узле приводит к топологическим ограничениям. Например, обычным ограничением является предельное количество узлов, непосредственно соединяемых с данным узлом, и предельная длина цепочки взаимосвязанных узлов, начиная от корневого узла. На нынешнем уровне техники ограничения объема памяти, быстродействия и энергопотребления узла приводят к тому, что общее количество узлов в сенсорной сети не может превышать порядка 10000 узлов, причем ограничения на топологию их взаимосвязей вносят дополнительные ограничения или требуют ручной конфигурации сети (см., например, заявку на выдачу патента США US 20080068156). Другим существенным недостатком сенсорных сетей с адресацией на основе уникальных идентификаторов является сложность развертывания сети. Каждый из узлов сети должен быть однозначно идентифицирован и зарегистрирован в центральном устройстве обработки данных. Поскольку большинство вариантов применения сенсорных сетей предусматривает привязку узлов к определенным точкам в пространстве (географическим координатам, номерам комнат в помещениях или т.п.), то операция регистрации уникальных идентификаторов узлов включает пространственную привязку. Для сетей размерностью порядка 10000 узлов данная операция является очень трудоемкой и приводящей к множеству ошибок. Оснащение узлов сенсорной сети приемниками глобальных навигационных спутниковых систем (GPS Navstar, ГЛОНАСС, Бейдоу) не позволит в полной мере решить проблему адресации узлов и маршрутизации сообщений. При использовании навигационных устройств возможно использовать географические координаты в качестве адреса узла, но использование навигационного приемника в каждом узле приводит к удорожанию устройств, повышенному энергопотреблению, а также к невозможности развертывания сенсорной сети на территориях с неустойчивым приемом спутниковых сигналов и внутри помещений либо под землей. Оснащение же навигационными приемниками только базовых станций в сочетании с адресацией узлов сети на основе уникальных идентификаторов частично устранит описанные выше недостатки, но усложнит при этом архитектуру и аппаратный состав сети.
В качестве ближайшего аналога предложенного изобретения предложена технология построения распределенной сенсорной сети с автоматическим определением пространственных координат узлами сети, описанная в заявке на получение патента Китая CN 101118280. Эта известная технология основана на использовании совместного анализа пространственных координат базовых станций сети, статистических коэффициентов и иных идентификационных характеристик, задаваемых для базовых станций и узлов сети. Известный из CN 101118280 способ развертывания и работы сенсорной сети включает расположение на территории покрытия сети базовых станций, соединенных каналами связи с центральным устройством обработки данных, и узлов сети, соединенных каналами связи с базовыми станциями сети, установление для каждой из базовых станций сети: истинного значения собственных координат и присвоение значений статистических коэффициентов, идентифицирующих базовую станцию, присвоение узлам сети идентифицирующих данных, установление связи между, по меньшей мере, ближайшими узлами и/или базовыми станциями сети, передачу значений собственных координат и статистических коэффициентов между базовыми станциями и узлами сенсорной сети, с определением для узлов сети значения собственных координат. Сенсорная сеть согласно предложенному способу включает центральное устройство обработки данных, совокупность базовых станций, для каждой из которых известно истинное значение собственных координат и присвоены значения статистических коэффициентов, идентифицирующих базовую станцию, соединенных каналами связи с центральным устройством обработки данных, совокупность узлов сети, для которых присвоены идентифицирующие данные, соединенных с базовыми станциями. Работа сенсорной сети, описанной в CN 101118280, характеризуется высоким уровнем погрешностей при определении координат узлов сети, при изменении внешних условий работы сети, которые могут не соответствовать заданному алгоритму, сенсорная сеть перестает работать с заданной эффективностью. Присвоение большого количества идентификаторов для элементов сети практически исключает возможность развертывания и масштабирования сети.
В отличие от известных решений предложенный способ развертывания сенсорной сети и сенсорная сеть обеспечит как передачу и маршрутизацию сообщений от центрального устройства обработки данных на датчики (сенсоры) и/или исполнительные устройства (актюаторы), так и развертывание и масштабирование сетей, а также возможность совместной работы нескольких сенсорных сетей.
Сенсорная сеть в соответствии с данным изобретением использует для маршрутизации географические или иные пространственные координаты, что позволяет применять простые геометрические алгоритмы маршрутизации.
При развертывании сети не требует регистрации узлов в центральном устройстве обработки данных, что резко упрощает процесс развертывания сенсорной сети.
Узлы сенсорной сети не включают в обязательном порядке средств приема сигналов спутниковых или иных систем глобального позиционирования, что удешевляет стоимость устройства узлов, сокращает энергопотребление и увеличивает срок службы при автономном питании, а также позволяет развертывать сенсорную сеть внутри помещений, под землей и на прочих территориях, где затруднен или невозможен прием сигналов систем глобального позиционирования.
Описанный выше результат, достигаемый при использовании сенсорной сети, достигается тем, что предложены способ развертывания и работы сенсорной сети и сенсорная сеть следующего вида.
Способ развертывания сенсорной сети включает расположение на территории покрытия сети базовых станций, соединенных каналами связи с центральным устройством обработки данных и узлов сети, соединенных каналами связи с базовыми станциями сети, причем количество узлов сети много больше количества базовых станций. Для каждой из базовых станций сети устанавливается: истинное значение собственных координат и присваиваются значения статистических коэффициентов, идентифицирующих базовую станцию. Устанавливается связь между, по меньшей мере, ближайшими узлами и/или базовыми станциями сети, передаются значения собственных координат и статистических коэффициентов между базовыми станциями и узлами сенсорной сети, с определением для узлов сети значения собственных координат. Согласно предложенному изобретению выделены следующие операции работы сенсорной сети. Базовые станции сети располагают по периферии территории покрытия сети только равномерно, а внутри территории действия сети как равномерно, так и хаотично. Узлы сети соединят каналами связи как с базовыми станциями, так и между собой. Количество узлов выбирается исходя из количества много больше количества базовых станций. Для каждой из базовых станций сети присваивают значение коэффициента доверия, близкое к максимальному. Для каждого из узлов сети присваивают случайно заданное значение собственных координат и значение коэффициента доверия, близкое к минимальному. Выполняют, по меньшей мере, один обмен значениями собственных координат и значениями коэффициентов доверия между, по меньшей мере, ближайшими узлами сенсорной сети и/или базовыми станциями сети, с которыми была установлена связь, с последующим вычислением узлами сети расчетного значения собственных координат. Расчетное значение собственных координат определяют как средневзвешенную величину случайно заданного значения собственных координат данного узла сети, случайно заданного значения собственных координат узлов сети, с которыми была установлена связь, и истинного значения собственных координат базовых станций сети, с которыми была установлена связь. В качестве весовых коэффициентов используются коэффициенты доверия, установленные для узлов и базовых станций сети, с которыми была установлена связь.
Центральное устройство обработки данных может передавать сообщения, например широковещательные, принимаемые, по меньшей мере, большей частью узлов сети с проверкой узлами, принявшими сообщение условия вхождения в подпространство территории покрытия сети, для которого было адресовано это сообщение, и выполнением действий, предписанных сообщением в случае выполнения этого условия. Развертывание и работа сенсорной сети согласно предложенному способу может осуществляться совместно с, по меньшей мере, одной иной сенсорной сетью, с по меньшей мере, частичным совпадением территорий покрытия и возможным совместным использованием центральных устройств обработки данных и базовых станций и присвоением сообщениям для узлов сети идентификатора приложения данной сети. Базовые станции и узлы сети могут быть расположены на территории покрытия сети стационарно, либо с возможностью перемещения в пространстве. Количество узлов сети выбирается из условия наличия пути соединения узла с базовой станцией через совокупность других узлов, то есть из условия связности сенсорной сети (связности графа межсоединений сенсорной сети). В качестве координат для узлов и базовых станций сети устанавливают географические координаты и/или относительные пространственные координаты (высота над уровнем моря, привязка к планировке зданий и сооружений). Для установления связи с базовой станцией может быть использован публичный сетевой идентификатор, например доменное имя или номер телефона. Установление связи с узлами и базовыми станциями сети может быть выполнено исходя из максимальным уровня воспринимаемого радиосигнала или же минимального количества устранимых ошибок в принятом сообщении.
Самоконфигурируемая сеть включает центральное устройство обработки данных, совокупность базовых станций, для каждой из которых известно истинное значение собственных координат и присвоены значения статистических коэффициентов, идентифицирующих базовую станцию, соединенных каналами связи с центральным устройством обработки данных, совокупность узлов сети, без присвоения им идентифицирующих данных, соединенных с базовыми станциями, причем количество узлов сети много больше количества базовых станций. Согласно предложенному изобретению выделены следующие отличия в построении сенсорной сети. Базовые станции сети расположены по периферии территории покрытия сети равномерно, внутри территории действия сети как равномерно, так и хаотично, для каждой из базовых станций присвоено значение коэффициента доверия, близкое к максимальному. Количество узлов сети много больше количества базовых станций. Узлы сети соединены каналами связи как с базовыми станциями, если они попадают в радиус действия канала связи, так и между собой, для каждого из узлов сети присвоено случайно заданное значение собственных координат и значение коэффициента доверия, близкое к минимальному. Каждый из узлов сети снабжен средствами определения расчетного значения собственных координат и средствами хранения полученных данных. Расчетное значение собственных координат определяют как средневзвешенную величину случайно заданного значения собственных координат данного узла сети, случайно заданного значения собственных координат узлов сети, с которыми была установлена связь, и истинного значения собственных координат базовых станций сети, с которыми была установлена связь. В качестве весовых коэффициентов используются коэффициенты доверия, установленные для узлов и базовых станций сети, с которыми была установлена связь.
Территория покрытия сети, по меньшей мере частично, совпадает с, по меньшей мере, одной иной сенсорной сетью, с возможностью совместного использования центральных устройств обработки данных и базовых станций. Базовые станции и узлы сети расположены на территории покрытия сети стационарно, либо с возможностью перемещения в пространстве. Координатами узлов и базовых станций сети являются географических координаты, либо относительные пространственные координаты (высота над уровнем моря, привязка к планировке зданий и сооружений). Узел сети содержит, по меньшей мере, один датчик и/или исполнительное устройство. В качестве каналов связи использованы беспроводные и/или проводные каналы.
Сущность предложенного изобретения поясняется фигурами чертежей:
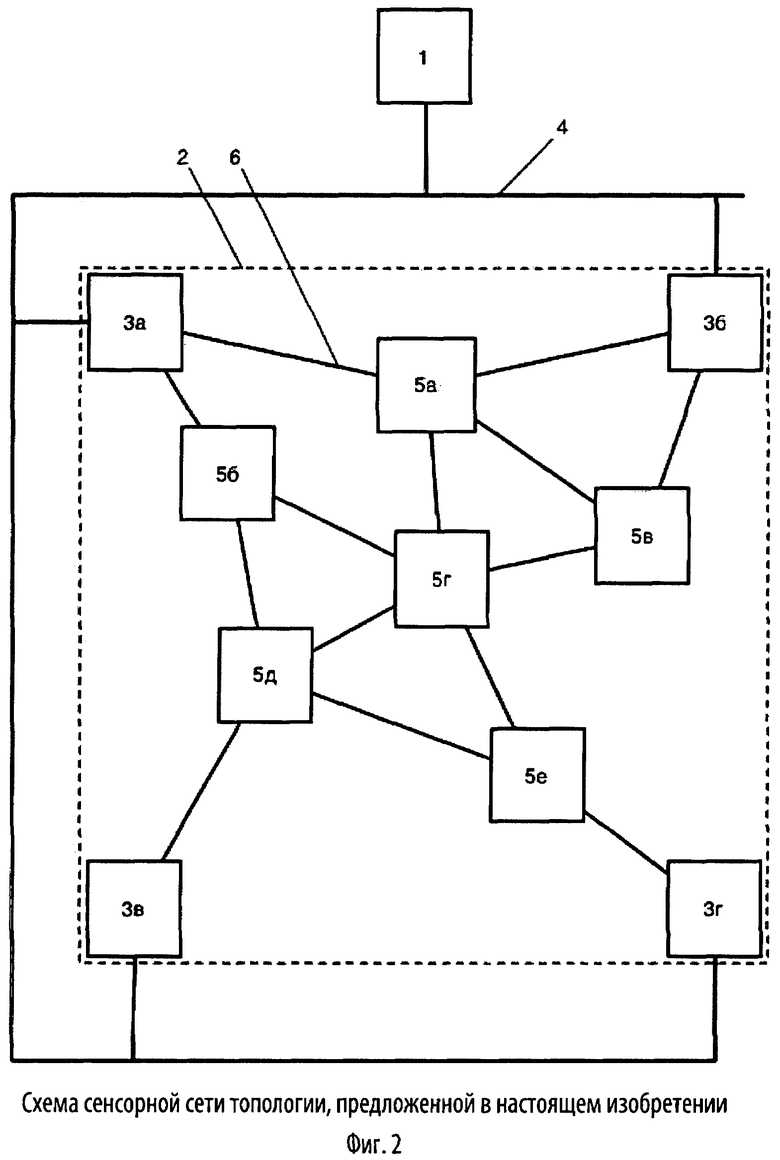
Фиг.2 - Схема топологии сенсорной сети, предложенной в настоящем изобретении;
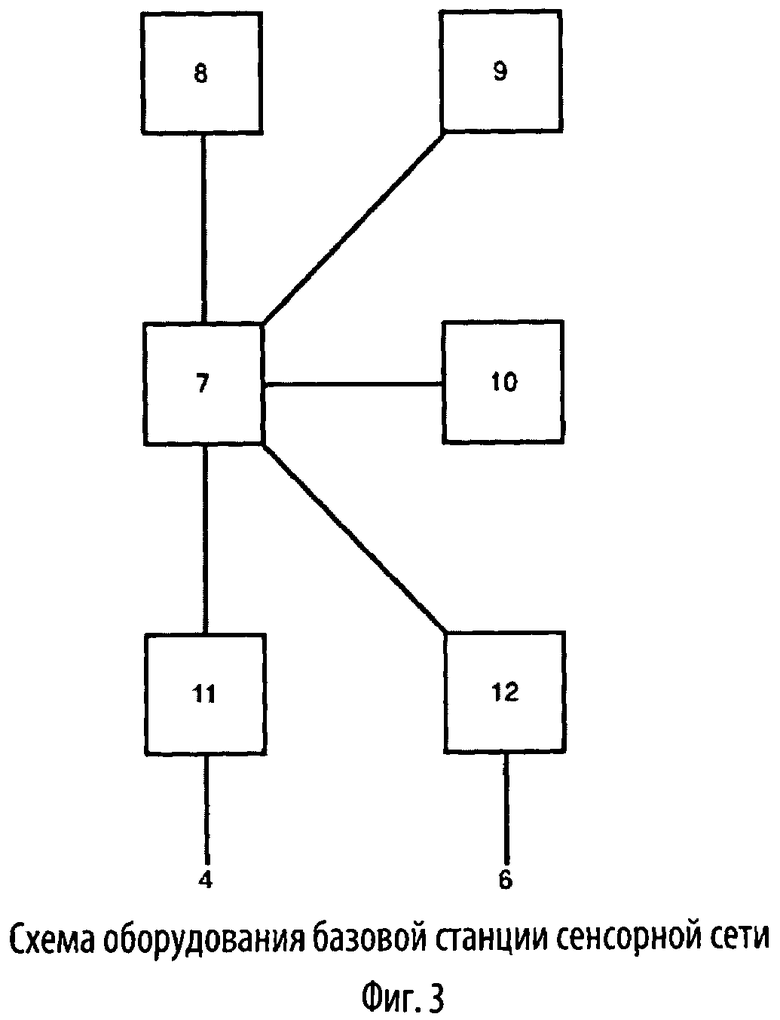
Фиг.3 - Схема оборудования базовой станции сенсорной сети;
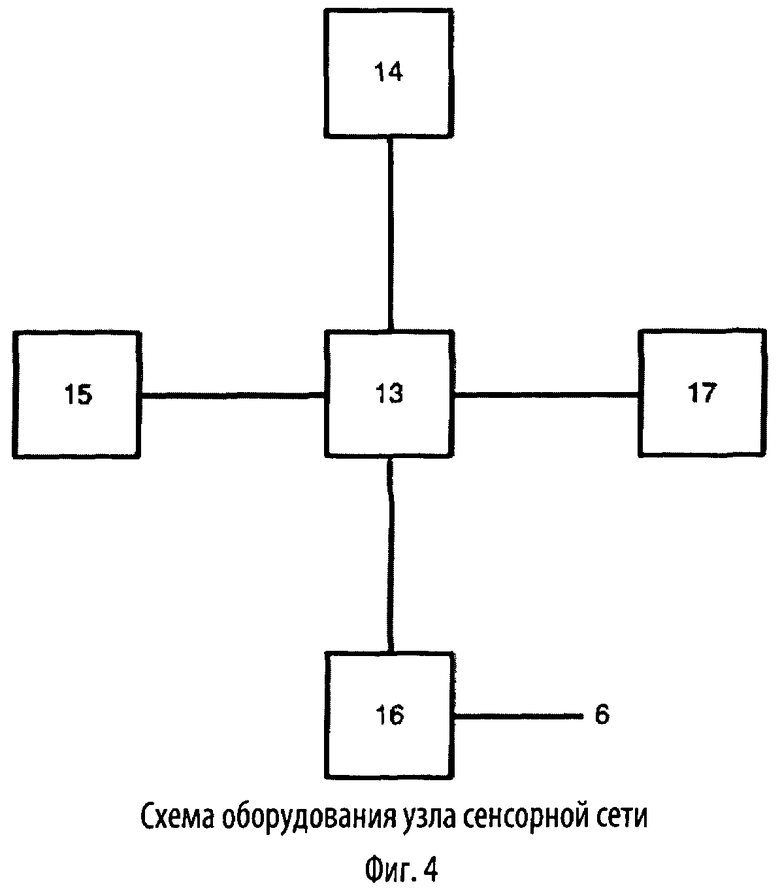
Фиг.4 - Схема оборудования узла сенсорной сети;
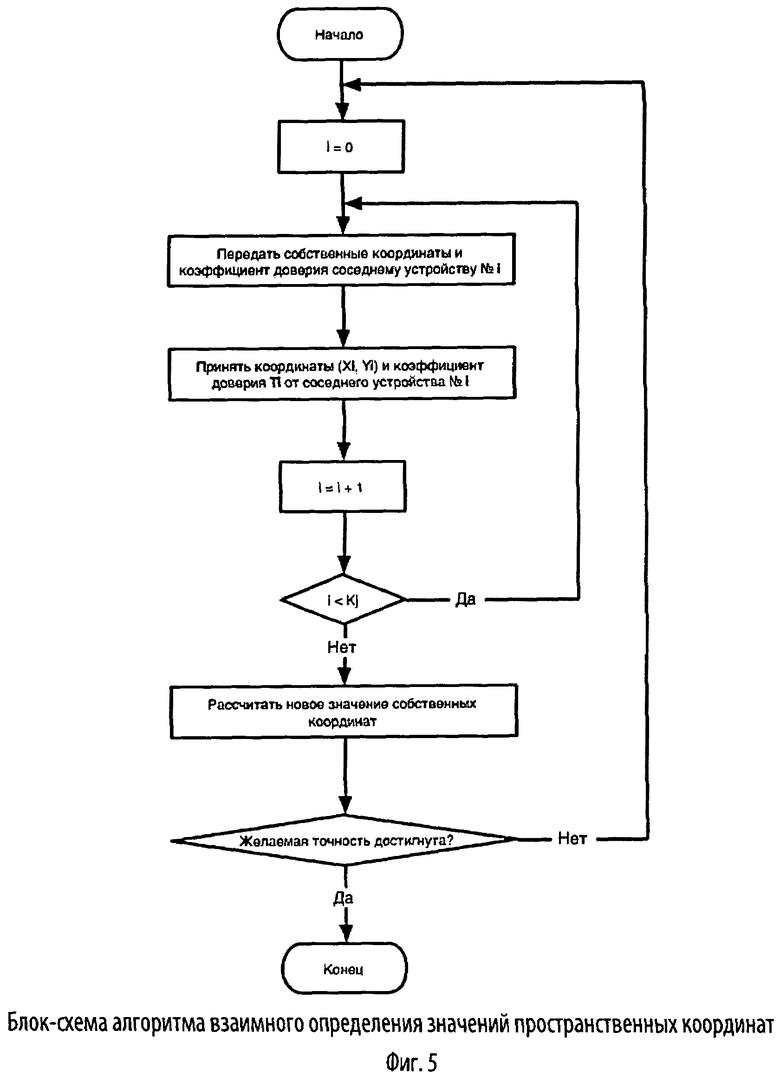
Фиг.5 - Блок-схема алгоритма взаимного определения значений пространственных координат;
Фиг.6 - Блок-схема алгоритма передачи сообщения от центрального устройства обработки данных к узлу с требуемыми координатами;
Фиг.7 - Отображение результатов моделирования сенсорной сети (I этап);
Фиг.8 - Отображение результатов моделирования сенсорной сети (II этап).
Самоконфигурируемую сенсорную сеть (Фиг.2) создают из центрального устройства обработки данных 1 и N базовых станций 3, располагая их равномерно или хаотически по границам территории покрытия 2 сенсорной сети и, предпочтительно, внутри указанной территории 2. Для базовых станций 3 устанавливают привязку к глобальным координатам путем оснащения их приемниками систем глобального позиционирования или ручной конфигурацией памяти для хранения значений координат пространственной привязки базовых станций 3. Базовые станции (Фиг.3) включают память для хранения значения коэффициента доверия 10, который представляет собой число в диапазоне от заданного минимального и максимального значений. Для базовых станций 3 с выполненной пространственной привязкой устанавливают коэффициент доверия, приблизительно равный максимальному значению. Далее, внутри территории покрытия 2 сенсорной сети равномерно или хаотически располагают М узлов 5, причем М>>N. Узлы 5 (Фиг.4) оснащают памятью для хранения значений координат пространственной привязки 14, которую инициализируют случайными значениями в процессе производства. Узлы включают память 15 для хранения значения коэффициента доверия, которую инициализируют значением, приблизительно равным минимальному значению коэффициента доверия. В процессе развертывания сети не требуется инициализации памяти 14 для хранения значений координат пространственной привязки узлов. За счет значительного превосходства количества узлов над количеством базовых станций влияние стоимости и/или сложности пространственной привязки базовых станций на общую стоимость сети и сложность развертывания пренебрежимо мало.
После развертывания сенсорной сети узлы 5 и базовые станции 3 устанавливают соединения по проводным или, предпочтительно, беспроводным каналам связи 6 с соседними узлами 5 и базовыми станциями 3 в пределах радиуса действия каналов связи 6, предпочтительно с ближайшими соседними узлами 5 и базовыми станциями 3. Каждый узел 5 и базовая станция 3 устанавливают соединение не более чем с К соседними узлами 5 и базовыми станциями 3, причем значение К зависит от характеристик пропускной способности канала связи 6, характеристик быстродействия и энергопотребления микропроцессоров, входящих в состав узлов 5 и базовых станций 3. Базовые станции 3 устанавливают соединение с центральным устройством 1 по каналу 4, предпочтительно проводному.
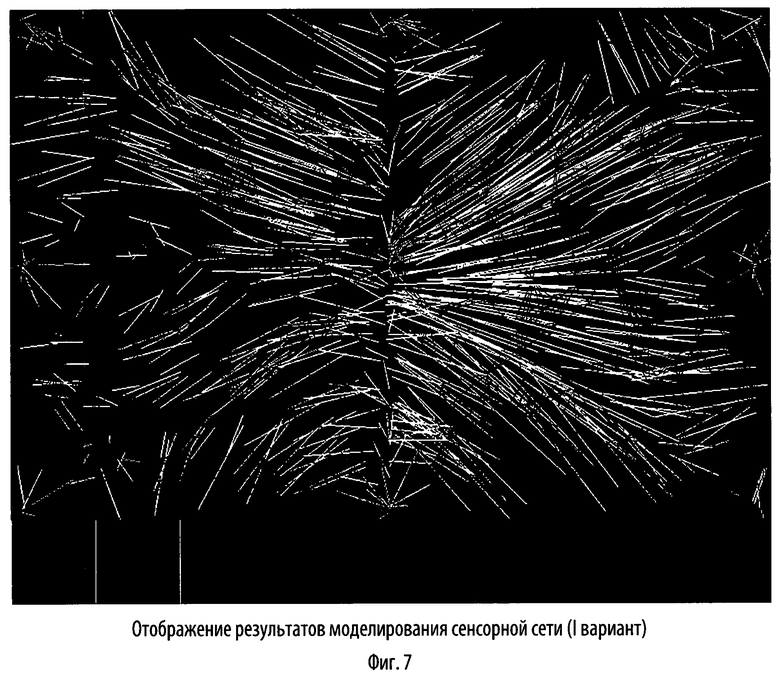
После установления соединения узлы 5 и базовые станции 3 выполняют операцию взаимного определения значений пространственных координат. Для этого каждый узел 5 или базовая станция 3 циклически передают значения собственной памяти для хранения значений координат пространственной привязки 9, 14 и памяти для хранения значения коэффициента доверия 10, 15. В каждом цикле обработки узел 5 получает значения координат и коэффициентов доверия от всех соседних устройств 3, 5, с которыми установлено соединение. Далее определяются расчетные значения собственных координат и значение собственного коэффициента доверия по методу взвешенного усреднения значений собственных координат и координат соседних устройств 3, 5, используя в качестве весовых коэффициентов коэффициенты доверия самого устройства 3, 5 и соседних аналогичных устройств. Результаты экспериментов (Фиг.7, 8), проведенных авторами данного изобретения, показывают, что описанный итеративный процесс сходится таким образом, что для всех узлов сенсорной сети получают расчетные значения их координат с погрешностью, среднее значение которой не превышает значения, приблизительно равного среднему расстоянию между соседними узлами 5.
Таким образом, узлы сенсорной сети 5 получают пространственную привязку. Для маршрутизации сообщения от центрального устройства обработки данных 1 к узлу 5 с координатами (x, y, z) центральное устройство 1 передает сообщение к одной или нескольким базовым станциям 3, ближайшим к требуемым координатам. Указанные базовые станции 3 передают сообщение ближайшим узлам 5, а узлы последовательно своим ближайшим узлам 5 в направлении вектора, направленного к требуемой точке (x, y, z). Узлы 5, пространственно привязанные к точкам, расположенным на расстоянии, не превышающем радиус чувствительности сенсорной сети r, воспринимают сообщение, как адресованное им. Дальнейший арбитраж узлов 5 для выбора окончательного адресата сообщения, также отправка подтверждения о приеме сообщения производят по необходимости исходя из технических требований к функционированию сети. Для маршрутизации сообщения от узла 5 к центральному устройству обработки данных 1 узлы 5 дополнительно оснащают памятью для хранения списка координат ближайших базовых станций, причем длина списка может быть не менее 1. Для передачи сообщения центральному устройству обработки данных 1 узел передает сообщение одному или нескольким соседним узлам 5 в направлении вектора, направленного к точке с координатами базовой станции 3. Когда сообщение достигает базовой станции 3, указанная базовая станция 3 передает сообщение непосредственно на центральное устройство обработки данных 1 и, при необходимости, отправляет в сторону передавшего узла сообщение о подтверждении передачи.
Согласно предлагаемому изобретению сенсорная сеть (Фиг.2) включает центральное устройство обработки данных 1, его состав не существенен для понимания данного изобретения, но может включать в себя один или несколько серверов приложения, один или несколько серверов баз данных, средства связи, средства пользовательского интерфейса. На территории 2 развертывания сенсорной сети располагают базовые станции 3а-3г. Базовые станции 3 располагают равномерно или хаотически по периметру территории 2 и, предпочтительно, равномерно или хаотически внутри территории 2. Базовые станции 3а-3г соединяют каналом связи 4 с центральным устройством обработки данных 1. Вид канала связи 4 несущественен для понимания данного изобретения, например, могут использовать проводные каналы связи типа Ethernet, или беспроводные каналы связи на основе сотовой телефонной сети GSM, или беспроводные каналы с использованием радиомодемов. Количество базовых станций 3 должно быть не менее двух и должно быть достаточным для, по крайней мере, схватывания всей территории 2 воображаемым многоугольником, в углах которого расположены базовые станции 3. Внутри территории 2 располагают равномерно или хаотически узлы 5а-5е сенсорной сети. Узлы 5 могут быть связаны каналами связи 6 с соседними узлами 5 и соседними базовыми станциями 3, если расстояние между соседними узлами и/или базовыми станциями не превышает радиуса действия канала связи 6. Вид канала связи 6 несущественен для понимания данного изобретения, например, могут использовать беспроводной канал малого радиуса действия в стандарте Zigbee, или Wi-Fi, или организовать канал связи 6 путем проводного соединения ближайших узлов и/или базовых станций. Количество узлов 5 не имеет значения для сути данного изобретения, но это количество должно быть достаточным для равномерного или хаотического покрытия узлами 5 территории 2 таким образом, чтобы расстояние между соседними узлами 5 не превышало радиуса действия канала связи 6 хотя бы для такого числа узлов 5, чтобы сенсорная сеть получилась связной, т.е. в ней не было узлов, для которых не существует пути соединения ни с одной базовой станцией 3.
Структурная схема базовой станции 3 по предпочтительному варианту исполнения показана на Фиг.3. Базовая станция включает микропроцессорное устройство 7, приемник 8 глобальной системы позиционирования, память значений координат 9, память значения коэффициента доверия 10, интерфейс 11 канала связи 4, интерфейс 12 канала связи 6. Приемник 8 передает значения координаты базовой станции в микропроцессорное устройство 7, которое сохраняет значения в памяти значений координат 9. По другому варианту исполнения базовая станция 3 не включает приемник 8 глобальной системы позиционирования, а значения координат базовой станции вводят в память значений координат 9 в процессе конфигурирования базовой станции. В этом случае координаты могут указывать не только в виде географических координат, но и в любой другой системе координат. Память значений координат 9 может сохранять значения двух координат (например, широты и долготы) либо трех координат (например, широты, долготы и высоты над уровнем моря, привязки к планировке зданий или сооружений). Память значений координат 9 может сохранять текущее значение координат либо серию значений координат, зафиксированных в различные моменты времени. В соответствии с данным изобретением в память 10 значения коэффициента доверия записывают значение, близкое к максимальному значению коэффициента доверия. Коэффициент доверия может представлять собой действительное число от 0 до 1 либо целое число, изменяющееся в заданном диапазоне значений, например от 0 до 65536. Диапазон изменения значения коэффициентов доверия в описываемом способе создания сенсорной сети одинаков для всех базовых станций 3 и узлов 5. С помощью интерфейса 11 микропроцессорное устройство 7 базовой станции устанавливает соединение с центральным устройством обработки данных 1 посредством канала связи 4. С помощью интерфейса 12 микропроцессорное устройство 7 базовой станции устанавливает соединение с узлами 5 посредством канала связи 6. На Фиг.3 не показаны элементы питания и прочие компоненты, известные в технике и не существенные для понимания.
Структурная схема узла 5 сенсорной сети показана на Фиг.4. Узел 5 включает микропроцессорное устройство 13, память значений координат 14, память значений коэффициента доверия 15, интерфейс 16 канала связи 6, средства памяти 17 для хранения списка соседних узлов. Память значений координат 14 может сохранять значения двух координат (например, широты и долготы) либо трех координат (например, широты, долготы и высоты над уровнем моря, привязки к планировке зданий или сооружений). Память значений координат 14 может сохранять текущее значение координат либо серию значений координат, зафиксированных в различные моменты времени. Первоначально (при производстве узлов 5) в память 14 заносят случайные значения координат. В соответствии с данным изобретением в память 15 значения коэффициента доверия записывают значение, близкое к минимальному значению коэффициента доверия. Коэффициент доверия может представлять собой действительное число от 0 до 1 либо целое число, изменяющееся в заданном диапазоне значений, например от 0 до 65536, причем диапазон изменения значения коэффициентов доверия должен совпадать с диапазоном, выбранным для базовых станций 3. С помощью интерфейса 16 микропроцессорное устройство 13 узла 5 устанавливает соединение с соседними узлами 5 и базовыми станциями 3 посредством канала связи 6. Средства памяти 17 позволяют сохранять список соседних узлов 5 и базовых станций 3, с которыми данное устройство может установить соединение по каналу связи 6. При этом для каждого элемента указанного списка соседних устройств 3, 5 средства памяти 17 позволяют сохранить значения координат и, возможно, прочие параметры, такие как параметры выбранного временного фрейма, для организации последовательного канала передачи данных 6 и другие параметры, известные специалистам.
После развертывания сети базовые станции 3 и узлы 5 устанавливают соединение со своими соседями, находящимися на расстоянии, не превышающем радиус действия канала связи 6. Специалисту в данной области техники понятно, что способ установки соединения не является существенным для области защиты данного изобретения. Например, устройства могут использовать последовательный канал передачи данных с назначением временных фреймов отдельным устройствам или использовать различные частотные каналы. По предпочтительному варианту исполнения, при установлении соединения узлы 5 должны выбирать ближайшие соседние устройства 3, 5 из общего числа соседних устройств 3, 5, расположенных на расстоянии, не превышающем радиуса действия канала 6. Специалисту в данной области техники понятно, что существуют различные способы выбора ближайших устройств 3, 5, и способ выбора не влияет на область защиты данного изобретения. Например, интерфейс 16 узла 5 может схемотехнически оценивать уровень радиосигнала и передавать эту оценку в микропроцессор 13, который, в свою очередь, выберет необходимое количество соседних устройств 3, 5 с максимальным уровнем радиосигнала, что с большой вероятностью соответствует минимальному расстоянию между узлами. Альтернативно, интерфейс 16 узла 5 может оценивать количество устранимых ошибок в декодированном двоичном сигнале и передавать это количество ошибок в микропроцессор 13, который, в свою очередь, выберет необходимое количество соседних устройств 3, 5 с минимальным количеством устранимых ошибок, что с большой вероятностью соответствует минимальному расстоянию между узлами. При проводном способе организации канала передачи данных 6 обеспечивают коммутацию таким образом, чтобы проводные каналы связывали ближайшие соседние устройства 3, 5, образуя топологию типа mesh. Общее количество соседних устройств 3, 5, с которыми каждый узел 5 устанавливает соединение, не превышает заданного значения К, а фактическое количество соседних устройств 3, 5, с которыми узел 5 j устанавливает соединение, обозначим Kj.
Для целей настоящего описания изобретения под установлением соединения между узлами 5 сенсорной сети и/или базовыми станциями 3 понимают запоминание в каждом устройстве 3, 5 параметров для связи с выбранными соседними устройствами 3, 5 в средствах памяти 17. Поскольку большинство сенсорных сетей критично ко времени автономной работы узлов 5, не требуется установление постоянного соединения, например ТСР-сокетов. Для обмена данными между устройствами 3, 5 достаточно производить передачу и прием данных в соответствии с зафиксированными параметрами связи с выбранными соседними устройствами 3, 5. После установления соединения устройства 3, 5 начинают процесс пространственной привязки узлов сенсорной сети, схематически изображенный на Фиг.5.
Процесс пространственной привязки узлов начинается с обнуления счетчика соседних узлов, с которыми установлено соединение (шаг 1).
Шаг 2. Устройство 3, 5 передает собственные значения координат (X, Y) и значение коэффициента доверия Т соседнему устройству, определяемому счетчиком соседних узлов. Если в сенсорной сети требуется привязка не только к плоскости, но и в объеме, то устройство передает значения координат (X, Y, Z). В случае, если данным устройством является базовая станция 3, то ее собственные координаты являются истинными.
Шаг 3. Устройство 3, 5 принимает от соседнего устройства, определяемого счетчиком соседних узлов, координаты и значение коэффициента доверия соседнего устройства и сохраняет их в массиве (Xi, Yi, Ti) или (Xi, Yi, Zi, Ti) в средствах памяти 17.
Шаг 4. Инкрементирование счетчика соседних узлов и проверка условия завершения цикла перебора соседних узлов. В случае, если список соседних узлов исчерпан, перейти к шагу 5, в противном случае вернуться к шагу 2.
Шаг 5. Производится расчет нового значения собственных координат. В случае, если данным устройством является базовая станция 3, то этот шаг можно пропустить, т.к. базовая станция имеет в памяти собственные истинные координаты. Расчет нового значения собственных координат производят на основании массива значений координат и значения коэффициентов доверия соседних устройств 3, 5. По одному из вариантов исполнения настоящего изобретения расчет значений координат проводится по формуле взвешенного среднего значения координат соседних устройств 3, 5, причем в качестве весовых коэффициентов используют коэффициенты доверия соответствующих соседних устройств 3, 5:
X=SUM(Xi*Ti)/SUM(Ti)
Y=SUM(Yi*Ti)/SUM(Ti)
Z=SUM(Zi#Ti)/SUM(Ti)
По другому варианту исполнения настоящего изобретения расчет значений координат проводится по формуле взвешенного среднего значения координат соседних устройств 3, 5 и одного или нескольких предыдущих значений собственных координат. Специалистам понятно, что в этом случае происходит цифровая фильтрация, сглаживающая скорость изменения собственных координат. Например, реализация цифрового фильтра низкой частоты первого порядка:
X=A*[SUM(Xi*Ti)/SUM(Ti)]+(1-A)*x
Y=A*[SUM(Yi*Ti)/SUM(Ti)]+(1-A)*y
Z=А*[SUM(Zi*Ti)/SUM(Ti)]+(1-A)*z
Здесь X, Y, Z - предыдущее значение координат, А - коэффициент от 0 до 1.
Специалистам понятно, что возможны различные вариации формул расчета средневзвешенных значений с использованием цифровой фильтрации различных порядков или других модификаций описанных здесь формул, которые не влияют на область защиты данного изобретения.
Еще один вариант исполнения данного изобретения предусматривает не только расчет значений собственных координат на основе взвешенной суммы значений координат соседних устройств 3, 5 и предыдущих значений собственных координат, но и расчет нового значения собственного коэффициента доверия на основе тех или иных соображений, например, исходя из оценки точности расчета значений собственных координат или расстояния от ближайшей базовой станции.
Шаг 6. Производят оценку точности расчета значений координат. В случае, если желаемая точность не достигнута, перейти к шагу 1.
Специалисты в данной области могут предложить различные способы оценки точности расчета значений координат, например метод подсчета числа итераций. Экспериментально установлено (см. Фиг.7, 8), что для сети с соотношением числа базовых станций к числу узлов сенсорной сети 1:100 средняя погрешность расчетных значений координат снижается до уровня среднего радиуса действия канала связи 6 приблизительно после 600 итераций описываемого алгоритма. Таким образом, достаточно произвести 600-700 итераций для сети с указанными параметрами и остановить процесс. На Фиг.7, 8 изображен результат моделирования процесса пространственной привязки узлов сенсорной сети из 900 узлов и 9 базовых станций. Каждый отрезок белого цвета соединяет точку фактического расположения узла и точку с расчетными значениями координат после Q итераций описываемого процесса (На Фиг.7 значение Q=200, на Фиг.8 значение Q=700). Таким образом, длина отрезка соответствует абсолютной величине погрешности расчета значений координат. Из Фиг.8 видно, что систематическая погрешность определения значений координат отсутствует (отрезки, отображающие индивидуальную погрешность, разнонаправленны). В нижней части Фиг.8 изображен график изменения средней погрешности в зависимости от номера итерации. Из графика видно, что среднее значение погрешности монотонно снижается до определенного уровня, приблизительно равного среднему расстоянию между ближайшими узлами сети, и дальнейшее продолжение итерационного процесса нецелесообразно.
В одном варианте исполнения сенсорную сеть согласно данному изобретению развертывают статично, т.е. в процессе эксплуатации узлы и базовые станции не перемещают в пространстве. В этом случае после достижения требуемой точности пространственной привязки процесс, изображенный на Фиг.5, прекращают, и каналы связи 6 используют только для передачи измерительной информации от датчиков, расположенных в узлах, а также передачи сообщений узлам. В другом варианте исполнения сенсорная сеть является подвижной во времени, по крайней мере, некоторые узлы или базовые станции могут перемещаться в пространстве, а также в сеть могут добавлять новые узлы и базовые станции. В этом случае процесс пространственной привязки, изображенный на Фиг.5, не прекращают, а, возможно, понижают частоту приема и передачи значений координат и коэффициентов доверия. Высвободившиеся ресурсы каналов связи 6 используют для передачи измерительной информации отдатчиков, расположенных в узлах, а также передачи сообщений узлам.
Для передачи сообщения от центрального устройства обработки данных 1 к узлам 5, расположенным вблизи точки с заданными значениями координат (x, y, z) в пространстве, характеризующем территорию 2, с заданным радиусом чувствительности r, в соответствии с описываемым изобретением, используют алгоритм, изображенный на Фиг.6. Под радиусом чувствительности r понимают максимальное расстояние отточки с координатами (x, y, z) в метрике пространства, характеризующего территорию 2. Например, в качестве r могут использовать евклидово расстояние или, в другом варианте реализации описываемого изобретения, в качестве r могут использовать половину длины стороны куба с центром в точке (x, y, z).
Для реализации алгоритма передачи сообщения от центрального устройства обработки данных 1 к узлам 5, изображенного на Фиг.6, центральное устройство обработки данных 1 снабжают средствами памяти для хранения списка В={b0, b1, b2, … bL-1,} базовых станций 3. Каждый элемент bi списка В содержит значения координат (xi, yi, zi) базовой станции 3i в пространстве, характеризующем территорию 2, а также сетевой адрес аi базовой станции 3 в сети, использующей канал связи 4. Например, в случае использования сети TCP/IP в качестве канала 4 передачи данных, в качестве адреса базовой станции могут использовать IP-адрес или доменное имя. В случае использования протокола SMS сотовой телефонной сети в качестве канала 4, в качестве адреса базовой станции могут использовать телефонный номер. Дополнительно, каждый элемент bi списка В может включать дополнительные данные, например время последнего обмена сообщениями, статистику качества связи, приоритет и т.п. данные, несущественные для описываемого изобретения.
Шаг 1. Центральное устройство обработки данных 1 инициализирует список NB ближайших базовых станций 3 и счетчик базовых станций I.
Шаг 2. Центральное устройство обработки данных 1 вычисляет расстояние от базовой станции bi до точки со значениями координат (x, y, z). Как указано выше, расстояние вычисляют в выбранной метрике пространства, характеризующего территорию 2. Вычисленное расстояние сравнивают со значением заданного приближения R к точке (x, y, z). Если вычисленное расстояние превышает R, переходят к шагу 4. Величина заданного приближения R к точке (x, y, z) характеризует эффективность выбора маршрута от центрального устройства обработки данных 1 до узлов 5, расположенных вблизи точки с заданными значениями координат (x, y, z), поскольку чем более короткая часть маршрута передачи сообщения пройдет по каналам связи 6, тем более эффективным является маршрут с точки зрения энергозатрат и пропускной способности сенсорной сети. По предпочтительному варианту реализации данного изобретения величину R выбирают приблизительно равной максимальному расстоянию между соседними базовыми станциями 3.
Шаг 3. Центральное устройство обработки данных 1 добавляет базовую станцию bi к списку NB ближайших базовых станций.
Шаг 4. Центральное устройство обработки данных 1 инкрементирует счетчик i и проверяет условие перебора всего списка В (размерности L) базовых станций 3. В случае, если список В не исчерпан, переходят на шаг 2.
Шаг 5. Центральное устройство обработки данных 1 выбирает из списка NB ближайших базовых станций подмножество ТВ целевых базовых станций. Целевые базовые станции могут выбирать исходя из разнообразных критериев. Например, могут выбрать в качестве подмножества ТВ единственную базовую станцию, расположенную ближе всего к точке с значениями координат (x, y, z). По другому варианту реализации изобретения, в качестве подмножества ТВ могут выбрать несколько ближайших базовых станций, расположенных вокруг точки с значениями координат (x, y, z). Дополнительными критериями для выбора подмножества ТВ могут быть статистические показатели качества связи, параметры приоритета, текущей загрузки базовых станций и иные параметры, известные специалистам.
Шаг 6. Центральное устройство обработки данных 1 передает сообщение базовым станциям, входящим в список ТВ, с помощью канала связи 4. Сообщение включает, помимо собственно содержательной части сообщения, значения координаты целевой точки (x, y, z) и значение заданного радиуса чувствительности r.
Шаг 7. Каждое устройство 3, 5, получив сообщение, вычисляет расстояние между точками с координатами (x, y, z) и собственными координатами (х0, y0, z0) устройства 3, 5. В случае, если вычисленное расстояние не превышает значения r заданного радиуса чувствительности, перейти к шагу 10,
Шаг 8. Каждое устройство 3, 5, получив сообщение, выбирает из списка узлов, с которыми установлено соединение по каналу связи 6, расположенного в средствах памяти 17, те узлы, которые расположены наиболее близко к точке с координатами (x, y, z), и формирует из них список TN целевых узлов. Специалистам понятно, что в качестве целевых узлов могут выбирать единственный узел, координаты которого наиболее близки к (x, y, z), либо несколько узлов. Критериями выбора целевых узлов могут являться статистические показатели качества связи, параметры приоритета, текущей загрузки узлов и иные параметры, очевидные для специалистов.
Шаг 9. Устройство 1 передает сообщение базовым станциям, входящим в список TN, с помощью канала связи 6. По предпочтительному варианту реализации изобретения, перед передачей сообщение модифицируют, добавляя в него значения координаты базовой станции 3, через которую маршрутизировали сообщение и, возможно, значения координаты текущего узла 5. Перейти к шагу 7.
Шаг 10. Устройство 3, 5 выполняет действия, заданные содержанием сообщения. Перечень этих действий зависит от области применения сенсорной сети и требований к логике приложения. Например, устройство 3, 5 может произвести измерение заданной физической величины, активизировать исполнительное устройство, передать ответный сигнал в центральное устройство обработки данных 1 и т.п. По предпочтительному варианту реализации изобретения, устройство 3, 5 формирует ответное сообщение о приеме первого сообщения и передает его в центральное устройство обработки данных 1 для целей квитирования. По другому варианту реализации изобретения, устройство 3, 5, помимо выполнения указанных действий, заданных содержанием сообщения, передает указанное сообщение соседним устройствам 3, 5 для гарантии того, чтобы все устройства 3, 5, расположенные вблизи точки (x, y, z) в пределах заданного радиуса чувствительности r, приняли указанное сообщение. Специалисту должно быть ясно, что все возможные действия устройства 3, 5 с собственными координатами вблизи точки (x, y, z) в пределах заданного радиуса чувствительности r, принявшего сообщения, определяются логикой приложения и не влияют на область защиты данного изобретения.
По одному из вариантов реализации данного изобретения на одной и той же территории или частично пересекающихся территориях развертывают сенсорные сети для различных приложений, принадлежащих разным компаниям. Например, на территории города могут развернуть первую сеть для управления уличным освещением и вторую сеть для контроля тепловых потерь на теплотрассах. Первая сеть может включать первое центральное устройство обработки данных 1, а вторая сенсорная сеть - второе центральное устройство обработки данных 1. Узлы и базовые станции первой и второй сенсорных сетей могут располагаться вперемешку и устанавливать соединение по каналу связи 6 друг с другом. Альтернативно, базовые станции могут совместно использоваться обеими сенсорными сетями. При этом первая и вторая сенсорная сеть кооперативно передают информацию между базовыми станциями и узлами сети. При передаче сообщения от первого центрального устройства обработки данных 1 на узлы первой сенсорной сети расположенные вблизи точки с координатами (х, y), данное сообщение получат как узлы первой сенсорной сети, так и узлы второй сенсорной сети, расположенные вблизи точки с координатами (х, y). Согласно данному изобретению сообщение должно содержать необходимую информацию для идентификации приложения так, чтобы узлы первой сенсорной сети воспринимали сообщение, а узлы второй сенсорной сети игнорировали сообщение. Например, сообщение могут сформировать в формате XML, используя параметр идентификатора приложения applicationlD:
<XML>
<action applicationlD="HHKW6652S">
измерить температуру
</action>
</XML>
Узлы первой сенсорной сети необходимо оснастить программным обеспечением, идентифицирующим приложение строкой "HHKW6652S". Посколько узлы сенсорной сети в любом случае необходимо оснастить программным обеспечением, а идентификатор приложения общий для всей сети, данная операция может проводиться групповым способом, следовательно она не влияет на общую трудоемкость развертывания сети.
По одному из вариантов реализации данного изобретения производят широковещательную передачу сообщения от центрального устройства обработки данных 1 множеству узлов 5, характеризуемых тем, что они расположены внутри замкнутой области S на территории 2. При этом область S задают известными в технике способами, например серией значений координат углов замкнутого многоугольника. Для реализации описываемого способа создания сенсорной сети описанный выше алгоритм передачи сообщений (Фиг.7) модифицируют таким образом, что сообщение, описанное в шаге 6, включает, помимо собственно содержательной части сообщения, характеристику области S и значение заданного радиуса чувствительности r. Далее, на шаге 7 каждое устройство 3, 5, получив сообщение, проверяет условие вхождения точки с собственными координатами (х0, y0, z0) в область S с заданной точностью r. На шаге 8 каждое устройство 3, 5 при формировании списка целевых узлов TN выбирает соседние узлы, расположенные ближе других к области S.
По следующему варианту реализации данного изобретения часть базовых станций 3 производит передачу широковещательных сообщений по каналу связи 6 таким образом, что радиус действия канала 6 при передаче широковещательных сообщений от базовых станций 3 к узлам 5 находится в диапазоне приблизительно от среднего расстояния между базовыми станциями до характерного размера территории 2. Учитывая, что к базовым станциям обычно не предъявляют высоких требований по экономичности энергопотребления, описанная модификация канала связи 6 возможна для беспроводных каналов простым повышением энергии сигнала за счет увеличения мощности и/или увеличения длительности импульсов передатчика в интерфейсе 12 базовой станции 3. Для приема широковещательных сообщений по последовательному беспроводному каналу связи 6 предусматривают отдельный временной интервал или частотный канал, хотя специалисты могут использовать иные методы. Таким образом, при передаче широковещательных сообщений от центрального устройства обработки данных 1 к узлам 5, расположенным в области S территории 2, не применяют алгоритм маршрутизации, изображенный на Фиг.6. В состав сообщения включают характеристику области S и значение заданного радиуса чувствительности r, как описано выше. Каждый узел 5 сенсорной сети при приеме широковещательного сообщения проверяет условие вхождения точки с собственными координатами в область S с заданной точностью r, и в случае удовлетворения этого условия, узел выполняет действия, заданные содержанием сообщения.
По предпочтительному варианту реализации узел 5 снабжают средствами памяти для хранения значений координат базовых станций, ближайших к данному узлу. Способ получения значений координат ближайших базовых станций не является существенным для данного описания, но специалисту понятно, что указанные значения координат могут получать из сообщений, модифицированных в процессе передачи, как описано на шаге 9 алгоритма, изображенного на Фиг.6, либо из широковещательных сообщений, либо иными путями. Для передачи сообщения от узла 5 в центральное устройство обработки данных 1 узел 5 передает сообщение одному или нескольким соседним узлам в направлении вектора, направленного к точке с координатами одной или нескольких ближайших базовых станций. Когда сообщение достигает базовой станции, указанная базовая станция передает сообщение непосредственно на центральное устройство обработки данных 1 и, при необходимости, отправляет в сторону передавшего узла сообщение о подтверждении передачи. В случае, если передающему узлу 5 неизвестны координаты ближайших базовых станций 3, указанный узел может передавать сообщение некоторому числу соседних узлов 5.
Таким образом, предложенный способ создания сенсорных и актуаторных сетей обладает важными преимуществами по сравнению с достигнутым уровнем техники, в качестве примера может быть рассмотрена реализация сети управления уличным освещением на основе сенсорной сети. В этой описываемой реализации изобретения в качестве узлов 5 сенсорной сети выступают блоки электронных балластов, каждый из которых включает средства включения газоразрядной лампы уличного освещения и средства контроля обрыва лампы. В качестве канала передачи данных 6 используют беспроводной канал передачи данных с радиусом действия 50-100 м. В соответствии с описываемым изобретением указанные блоки электронных балластов объединяют в сенсорную сеть, причем при монтаже не требуется какой-либо идентификации или географической привязки электронных балластов. Учитывая, что в городе с населением около 500 тыс.чел. количество светильников уличного освещения приблизительно равно 50-100 тыс. шт., достигают значительную экономию трудозатрат при развертывании сенсорной сети. После завершения процесса пространственной привязки, описанного выше на Фиг.5, сеть используют для дистанционного управления освещением и для контроля исправности ламп. Например, в целях экономии энергии для дистанционного включения режима пониженного освещения в позднее ночное время в заданном районе города центральное устройство обработки данных 1 передает широковещательные сообщения на блоки электронных балластов, расположенные в пределах замкнутого многоугольника S, ограничивающего заданный район города. При этом радиус чувствительности r, в соответствии с описываемым изобретением, устанавливают равным 50-100 м, что соответствует расстоянию между соседними столбами уличного освещения. Наличие погрешности пространственной привязки, свойственное описываемому способу создания сенсорной сети, приведет к тому, что команда на включение пониженного напряжения питания ламп уличного освещения будет выполнена в заданном районе города, и при этом небольшое количество светильников на границе многоугольника S будут ошибочно включены на полный или пониженный режим. Для описываемого приложения, тем не менее, данная погрешность является несущественной. В случае выхода из строя лампы блок электронных балластов данного светильника передаст сообщение о неисправности с указанием собственных координат. Диспетчер сможет направить электриков для замены лампы в точку с указанными координатами, при этом в рамках описываемого приложения погрешность определения координат в 50-100 м не является существенной. Фактически, все блоки электронных балластов привязаны к географическим координатам, при этом не требуя оснащения приемниками глобальной системы позиционирования. Помимо значительной стоимости оснащения 100 тыс. устройств приемниками глобальной системы позиционирования, спутниковые системы неустойчиво работают в условиях многоэтажной городской застройки, поэтому зачастую не могут обеспечить точность позиционирования выше 50-100 м. Сенсорная сеть, описанная в данном изобретении, способна работать не только на поверхности земли в условиях плотной многоэтажной застройки, но и под землей, например в тоннелях и подземных автостоянках.
Таким образом, предложены способ развертывания и работы сенсорной сети и сенсорная сеть которые обеспечат как передачу и маршрутизацию сообщений от центрального устройства обработки данных на датчики (сенсоры) и/или исполнительные устройства (актюаторы), так и развертывание и масштабирование сетей, а также возможность совместной работы нескольких сенсорных сетей.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ РАСПРЕДЕЛЕННОЙ БАЛАНСИРОВКИ ТРАФИКА В БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2013 |
|
RU2528415C1 |
| СПОСОБ ОРГАНИЗАЦИИ СВЯЗИ В БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2023 |
|
RU2817372C1 |
| СПОСОБ ОБЕСПЕЧЕНИЯ ЖИВУЧЕСТИ РАСПРЕДЕЛЕННОЙ АБОНЕНТСКОЙ СЕТИ СВЯЗИ | 2015 |
|
RU2600941C1 |
| Способ сбора телеметрической информации о состоянии объектов РКТ при транспортировании с помощью беспроводной сенсорной сети ZigBee | 2018 |
|
RU2708796C2 |
| Способ снижения энергопотребления в беспроводной сенсорной сети | 2021 |
|
RU2791136C1 |
| КОМПЛЕКС ДЛЯ ПРОВЕДЕНИЯ ПОДВИЖНОЙ ИГРЫ И СПОСОБ МОДЕЛИРОВАНИЯ РАБОТЫ СО СПОРТИВНЫМ СНАРЯДОМ | 2007 |
|
RU2366481C2 |
| КОНФИГУРАЦИЯ УЗЛА В СЕТИ СВЯЗИ | 2008 |
|
RU2461137C2 |
| Способ обслуживания сенсорных узлов беспроводных сенсорных сетей | 2021 |
|
RU2790652C1 |
| СПОСОБ НЕЙРОСЕТЕВОЙ КЛАСТЕРИЗАЦИИ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2014 |
|
RU2571541C1 |
| СПОСОБ МОНИТОРИНГА ЛЕСНЫХ ПОЖАРОВ И КОМПЛЕКСНАЯ СИСТЕМА РАННЕГО ОБНАРУЖЕНИЯ ЛЕСНЫХ ПОЖАРОВ, ПОСТРОЕННАЯ НА ПРИНЦИПЕ РАЗНОСЕНСОРНОГО ПАНОРАМНОГО ОБЗОРА МЕСТНОСТИ С ФУНКЦИЕЙ ВЫСОКОТОЧНОГО ОПРЕДЕЛЕНИЯ ОЧАГА ВОЗГОРАНИЯ | 2011 |
|
RU2486594C2 |

Изобретение относится к средствам связи и управления удаленными исполнительными устройствами и измерительными приборами. Технический результат заключается в упрощении маршрутизации передаваемых сообщений и снижении энергопотребления сетей за счет совместной работы нескольких сенсорных сетей. Построение сенсорной сети, включающей центральное устройство обработки данных, совокупность базовых станций, узлов и каналов связи. В ходе развертывания работы сенсорной сети выполняют, по меньшей мере, один обмен значениями собственных координат и значениями коэффициентов доверия между узлами сенсорной сети и/или базовыми станциями сети, с которыми была установлена связь, с последующим определением узлами сети расчетного значения собственных координат. 2 н. и 19 з.п. ф-лы, 8 ил.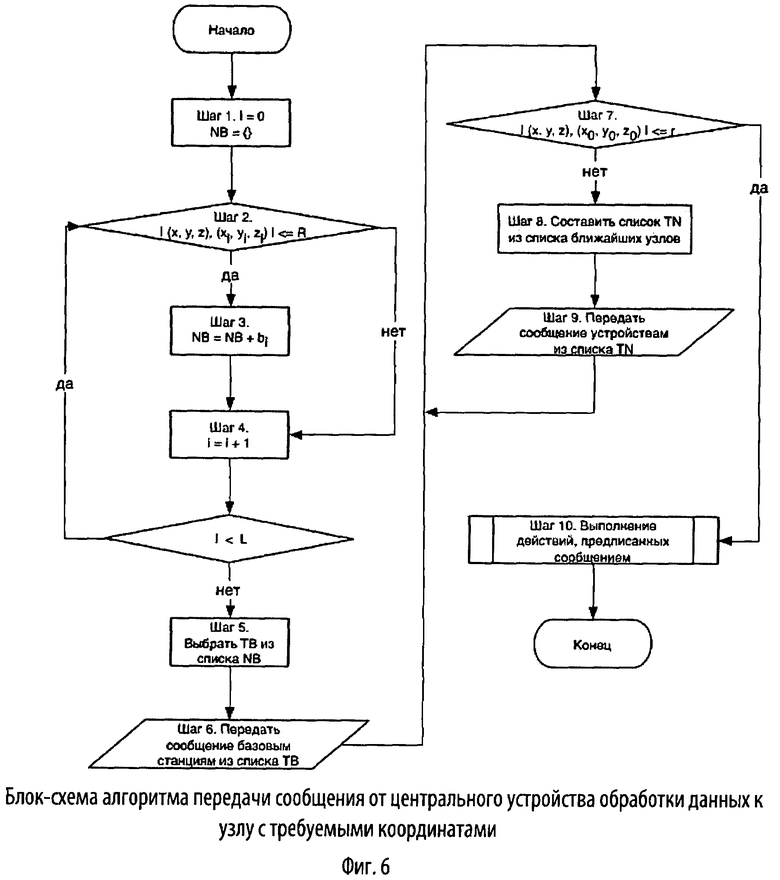
1. Способ развертывания сенсорной сети, включающий расположение на территории покрытия сети базовых станций, соединенных каналами связи с центральным устройством обработки данных, и узлов сети, соединенных каналами связи с базовыми станциями сети, установление для каждой из базовых станций сети: истинного значения собственных координат и присвоение значений статистических коэффициентов, идентифицирующих базовую станцию, установление связи между, по меньшей мере, ближайшими узлами и/или базовыми станциями сети, передачу значений собственных координат и статистических коэффициентов между базовыми станциями и узлами сенсорной сети с определением для узлов сети значения собственных координат, отличающийся тем, что базовые станции сети располагают по периферии территории покрытия сети только равномерно, а внутри территории действия сети - как равномерно, так и хаотично, узлы сети соединят каналами связи как с базовыми станциями, так и между собой, причем количество узлов выбирается, исходя из количества много больше количества базовых станций, для каждой из базовых станций сети присваивают значение коэффициента доверия, близкое к максимальному, для каждого из узлов сети присваивают случайно заданное значение собственных координат и значение коэффициента доверия, близкое к минимальному, выполняют, по меньшей мере, один обмен значениями собственных координат и значениями коэффициентов доверия между, по меньшей мере, ближайшими узлами сенсорной сети и/или базовыми станциями сети, с которыми была установлена связь, с последующим определением узлами сети расчетного значения собственных координат, как средневзвешенной величины случайно заданного значения собственных координат данного узла сети, случайно заданного значения собственных координат узлов сети, с которыми была установлена связь, и истинного значения собственных координат базовых станций сети, с которыми была установлена связь, причем в качестве весовых коэффициентов используются коэффициенты доверия, установленные для узлов и базовых станций сети, с которыми была установлена связь.
2. Способ развертывания сенсорной сети по п.1, отличающийся тем, что центральное устройство обработки данных передает сообщения, например широковещательные, принимаемые, по меньшей мере, большей частью узлов сети с проверкой узлами принявшими сообщение условия вхождение в подпространство территории покрытия сети, для которого было адресовано это сообщение, и выполнением действий, предписанных сообщением в случае выполнения этого условия.
3. Способ развертывания сенсорной сети по п.1, отличающийся тем, что ее развертывание и работа осуществляется совместно с, по меньшей мере, одной иной сенсорной сетью, с по меньшей мере, частичным совпадением территорий покрытия и возможным совместным использованием центральных устройств обработки данных и базовых станций и присвоением сообщениям для узлов сети идентификатора приложения данной сети.
4. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что базовые станции и узлы сети располагают на территории покрытия сети стационарно.
5. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что базовые станции и узлы сети располагают на территории покрытия сети с возможностью перемещения в пространстве.
6. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что количество узлов сети выбирают из условия возможности соединения каждого узла сети с, по меньшей мере, одной базовой станцией.
7. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что в качестве координат для узлов и базовых станций сети устанавливают географические координаты.
8. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что в качестве координат для узлов и базовых станций сети устанавливают относительные пространственные координаты.
9. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что для установления связи с базовой станцией использован публичный сетевой идентификатор, например доменное имя или номер телефона.
10. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что производится установление связи с узлами и базовыми станциями сети с максимальным уровнем радиосигнала.
11. Способ развертывания сенсорной сети по любому из п.п.1, 2, 3, отличающийся тем, что производится установление связи с узлами и базовыми станциями сети с минимальным количеством устранимых ошибок.
12. Самоконфигурируемая сенсорная сеть, включающая центральное устройство обработки данных, совокупность базовых станций, для каждой из которых известно истинное значение собственных координат и присвоены значения статистических коэффициентов, идентифицирующих базовую станцию, соединенных каналами связи с центральным устройством обработки данных, совокупность узлов сети, соединенных с базовыми станциями, отличающаяся тем, что базовые станции сети расположены по периферии территории покрытия сети равномерно, внутри территории действия сети, как равномерно, так и хаотично, причем для каждой из базовых станций присвоено значение коэффициента доверия, близкое к максимальному, количество узлов сети много больше количества базовых станций, узлы сети соединены каналами связи, как с базовыми станциями, так и между собой, причем для каждого из узлов сети присвоено случайно заданное значение собственных координат и значение коэффициента доверия, близкое к минимальному, причем каждый из узлов сети снабжен средствами определения расчетного значения собственных координат, как средневзвешенной величины случайно заданного значения собственных координат данного узла сети, случайно заданного значения собственных координат узлов сети, с которыми была установлена связь, и истинного значения собственных координат базовых станций сети, с которыми была установлена связь, причем в качестве весовых коэффициентов используются коэффициенты доверия, установленные для узлов и базовых станций сети, с которыми была установлена связь, и средствами хранения полученных данных.
13. Самоконфигурируемая сенсорная сеть по п.12, отличающаяся тем, что на территория покрытия сети, по меньшей мере частично, совпадает с, по меньшей мере, одной иной сенсорной сетью с возможностью совместного использования центральных устройств обработки данных и базовых станций.
14. Самоконфигурируемая сенсорная сеть по п.12 или 13, о отличающаяся тем, что базовые станции и узлы сети расположены на территории покрытия сети стационарно.
15. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что базовые станции и узлы сети расположены на территории покрытия сети с возможностью перемещения в пространстве.
16. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что координатами узлов и базовых станций сети являются географические координаты.
17. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что координатами узлов и базовых станций сети являются относительные пространственные координаты.
18. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что узел сети содержит, по меньшей мере, один датчик.
19. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что узел сети содержит, по меньшей мере, одно исполнительное устройство.
20. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что в качестве каналов связи использованы беспроводные каналы.
21. Самоконфигурируемая сенсорная сеть по п.12 или 13, отличающаяся тем, что в качестве каналов связи использованы проводные каналы.
| ВЫЧИСЛИТЕЛЬНАЯ СИСТЕМА И СПОСОБ ФОРМИРОВАНИЯ АНАЛИТИЧЕСКИХ ДАННЫХ, ОТНОСЯЩИЕСЯ К СПОСОБУ ОБРАБОТКИ ПРОЕКТНЫХ ПРЕДЛОЖЕНИЙ И ЗАЯВОК | 2003 |
|
RU2329538C2 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| СПОСОБ ОРГАНИЗАЦИИ МНОГОПРОЦЕССОРНОЙ ЭВМ | 2005 |
|
RU2312388C2 |
| МОДУЛЬ КОММУНИКАЦИОННОЙ СЕТИ | 2000 |
|
RU2166793C1 |
| УСТРОЙСТВО ДЛЯ ОЦЕНКИ ЭФФЕКТИВНОСТИ АЛГОРИТМИЧЕСКОГО ОБЕСПЕЧЕНИЯ | 2002 |
|
RU2207621C1 |

