Изобретение относится к области сетей и телекоммуникаций, предпочтительно пространственно-распределенных беспроводных сенсорных сетей (БСС), и может быть использовано в иерархических протоколах маршрутизации БСС.
Из предшествующего уровня техники известен способ кластеризации (аналог), лежащий в основе протокола маршрутизации Hybrid Energy-Efficient Distributed (HEED), используемого в БСС. В данном протоколе используется итеративный алгоритм образования кластеров, где каждый узел имеет следующие параметры: вероятность стать главным кластерным узлом (ГКУ) - это функция от остаточной энергии узла сети и внутрикластерная коммуникационная стоимость - это функция от близости соседних узлов сети (плотности кластера) или же используется уровень узла сети, т.е. число соседних узлов сети. Каждый узел на основании вероятности стать главным кластерным узлом (ГКУ) принимает решение отправлять сообщения другим узлам сети о том, что он может стать ГКУ на данной итерации или нет. Основываясь на этих сообщениях, каждый узел сети выбирает ГКУ с самой низкой стоимостью передачи данных (ГКУ мог бы быть он сам). На каждой итерации узлы сети увеличивают свою вероятность стать ГКУ.
Недостатком первого способа кластеризации является большое количество сообщений, которые пересылаются между узлами БСС в течение множества итераций, пока не будут выбраны окончательные ГКУ для каждого кластера БСС.
Также известен второй способ кластеризации (аналог), лежащий в основе протокола маршрутизации Distributed weight-based energy-efficient hierarchical clustering (DWEHC), используемого в БСС. Способ является улучшением способа, используемого в основе протокола HEED, и позволяет сбалансировать размеры кластеров БСС и оптимизировать внутрикластерную топологию, используя информацию о расположении узлов БСС. В отличие от протокола HEED протокол DWEHC создает многоуровневую структуру для внутрикластерной связи и ограничивает ГКУ в количестве подконтрольных ему узлов БСС.
Недостатком второго способа кластеризации является большое количество сообщений, которые пересылаются между узлами БСС в течение множества итераций, пока не будут окончательно выбраны ГКУ для каждого кластера БСС. Также недостатком второго способа является возможность только прямой передачи данных при межкластерной связи (передаче сообщений) между ГКУ и базовой станцией БСС, не используя, узлы-посредники, что накладывает ограничение на масштабируемость сети в целом, а также приводит к относительно низкой устойчивости информационного взаимодействия между узлами сети при использовании в БСС подвижных сенсоров.
Также известен третий способ кластеризации (аналог), лежащий в основе протокола маршрутизации Low Energy Adaptive Clustering Hierarchy (LEACH), используемого в БСС. Согласно этому способу случайным образом осуществляется выбор нескольких узлов БСС, которые будут центрами кластеров, т.е. ГКУ. При этом каждый узел БСС может стать ГКУ с вероятностью 1/р, где р - это количество итераций, в которых выбираются ГКУ кластеров БСС. Каждый узел БСС, не являющийся ГКУ, выбирает ближайший к нему ГКУ и присоединяется к его кластеру. Иерархия БСС получается следующая: подчиненные узлы БСС передают данные ГКУ, далее ГКУ передает данные напрямую на базовую станцию.
Недостатком третьего способа кластеризации является случайность выбора ГКУ БСС, в результате в одной части сети скапливается слишком много ГКУ, а в другой части сети их может вообще не быть. Также недостатком прототипа является возможность только прямой передачи данных в межкластерной связи от ГКУ на базовую станцию, что накладывает ограничение на масштабируемость сети, а также приводит к относительно низкой устойчивости информационного взаимодействия между узлами сети при использовании в БСС подвижных сенсоров.
Наиболее близким по технической сущности к заявляемому является способ нейросетевой кластеризации БСС на основе самоорганизующейся искусственной нейронной сети (ИНС) Кохонена (прототип) [1-3]. Согласно этому способу выбор ГКУ и ведомых кластерных узлов (ВКУ) БСС осуществляется с использованием данных о радиовидимости между узлами сети. Данные о радиовидимости являются входными векторами при обучении самоорганизующейся ИНС Кохонена в соответствии с конструктивным методом. При этом число кластеров БСС определяется в соответствии с числом нейронов нейронной сети Кохонена, количество которых задается автоматически на основании отличия и подобия входных данных о радиовидимости между узлами БСС. Размер кластеров определяется радиусом чувствительности нейронов. Этот аналог является прототипом для заявленного изобретения.
Недостатком способа (прототипа) является относительно низкая устойчивость информационного взаимодействия между узлами БСС при его применении в протоколах иерархической маршрутизации и малое время актуальности результатов кластеризации сети при использовании в БСС подвижных сенсоров, что приводит к высокой динамике изменения топологии сети. Данный недостаток обусловлен использованием при кластеризации только одного параметра - нормированного значения уровня радиовидимости между всеми узлами БСС, представленного в виде матрицы энергетической видимости узлов БСС, что ограничивает применение способа (прототипа) в БСС с подвижными сенсорами.
Техническим результатом изобретения является повышение устойчивости информационного взаимодействия между узлами БСС при его использовании в протоколах иерархической маршрутизации, за счет учета дополнительных параметров функционирования узлов сети и увеличение времени актуальности результатов кластеризации узлов БСС в условиях высокой динамики топологии БСС (наличие подвижных сенсоров).
Технический результат достигается тем, что в известном способе нейросетевой кластеризации БСС на основе данных о радиовидимости выполняется описание структуры БСС, кластеризация с использованием самоорганизующейся ИНС Кохонена, обучение которой осуществляется по конструктивному методу обучения, где количество нейронов самоорганизующейся ИНС Кохонена задается автоматически на основании отличия и подобия входных данных об узлах БСС, причем радиус чувствительности нейронов слоя Кохонена задается в пределах от 0,22 до 0,36. При этом автоматическая генерация нейронов не приводит к бесконечному росту их числа (увеличению числа кластеров). На основе данных кластеризации формируются информационные направления связи, обеспечивается межкластерное и внутрикластерное взаимодействие между узлами БСС.
Дополнительно измеряются значения оставшегося времени функционирования и интенсивности информационного обмена соответствующих узлов БСС, на основе которых рассчитывается обобщенный показатель собственной полезности для каждого узла БСС.
Формируется матрица связности узлов БСС на основе значений нормализованной матрицы энергетической видимости (радиовидимости) между узлами БСС.
Создается неориентированный граф всей БСС на основе матрицы связности узлов БСС.
Формируется матрица полезности узлов БСС на основе значений обобщенного показателя собственной полезности узлов БСС.
Формируется обучающая матрица для БСС путем вычисления произведения Адамара матрицы связности и матрицы полезности узлов БСС.
Создается взвешенный ориентированный граф всей БСС на основе обучающей матрицы для БСС.
Выполняется обучение самоорганизующейся ИНС Кохонена на основе значений строк, полученной обучающей матрицы для БСС.
Выполняется формирование информационных направлений связи и обеспечение межкластерного и внутрикластерного взаимодействия между узлами БСС с использованием матрицы полезности узлов БСС.
Благодаря перечисленной новой совокупности существенных признаков за счет использования дополнительных параметров функционирования узлов БСС при вычислении их обобщенного показателя собственной полезности и проведении кластеризации на основе этого показателя достигается цель заявленного способа - повышение устойчивости информационного взаимодействия между узлами БСС и увеличение времени актуальности результатов кластеризации сети в условиях высокой динамики изменения топологии БСС (наличие подвижных узлов).
Заявленный способ поясняется чертежами, на которых показаны:
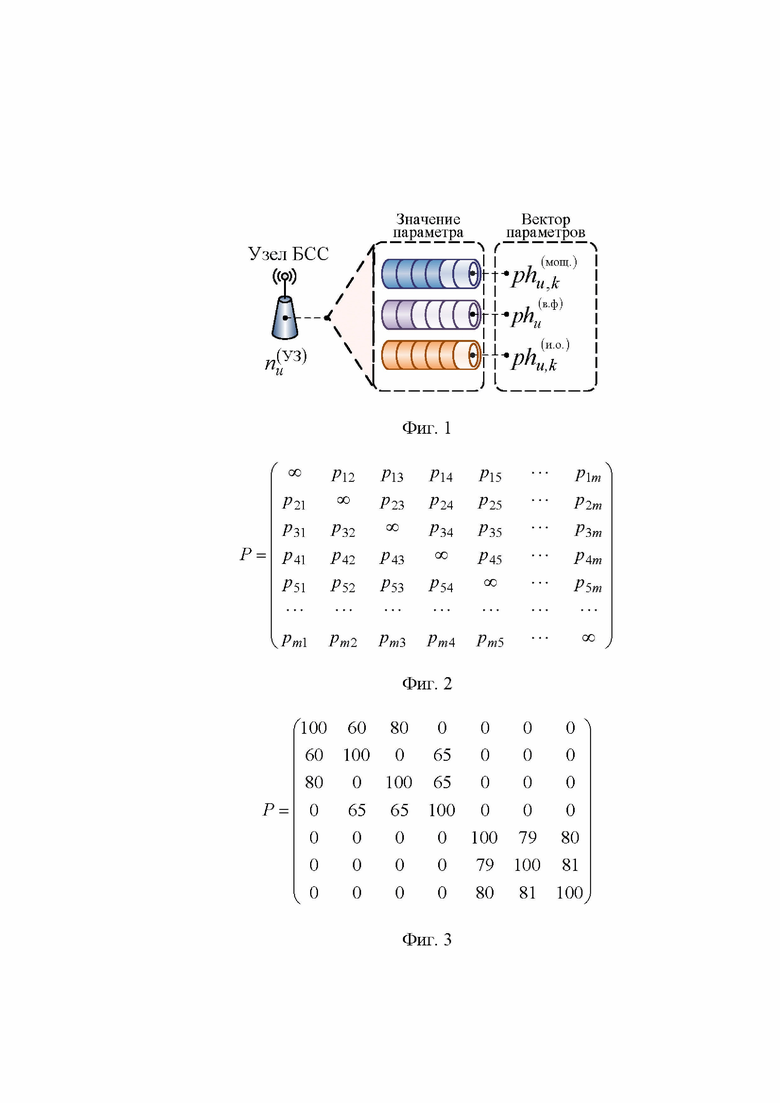
на фиг. 1 вектор технических параметров u-го узла БСС;
на фиг. 2 матрица энергетической видимости (радиовидимости) для БСС из т узлов;
на фиг. 3 практическое представление матрицы энергетической видимости (радиовидимости) для БСС из 7 узлов;
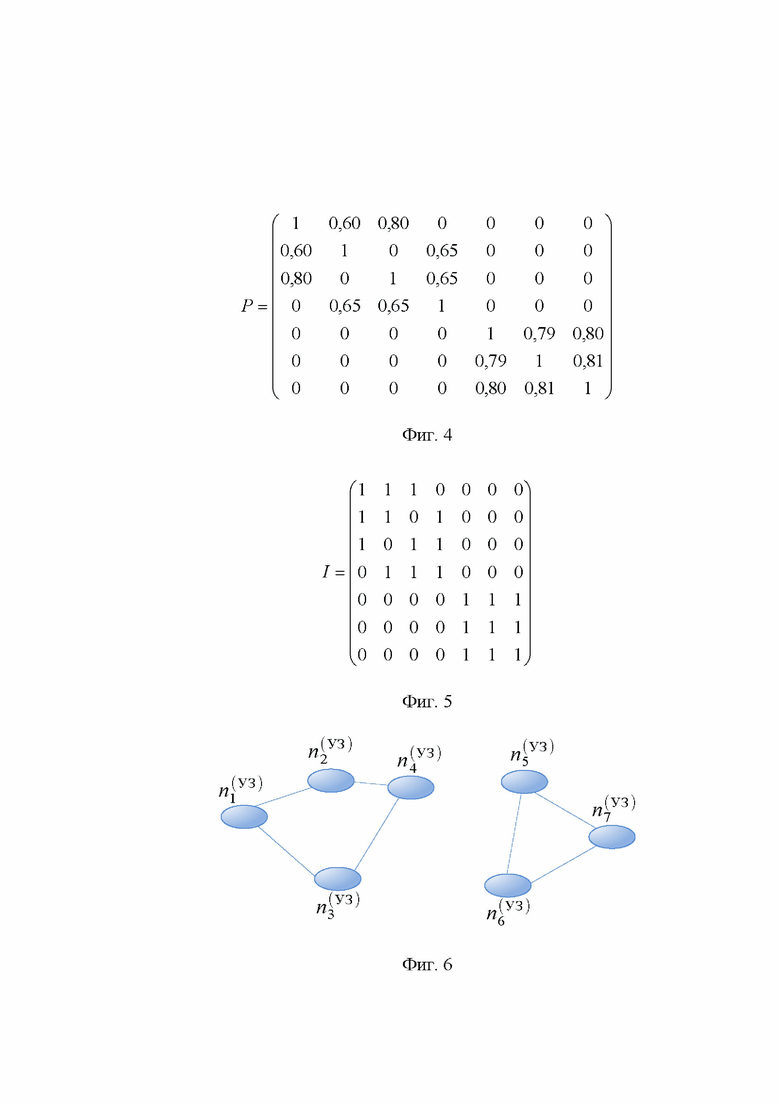
на фиг. 4 практическое представление нормализованной матрицы энергетической видимости (радиовидимости) для БСС из 7 узлов;
на фиг. 5 практическое представление матрицы связности для БСС из 7 узлов;
на фиг. 6 представление БСС из 7 узлов в виде неориентированного графа в соответствии с матрицей связности узлов БСС;
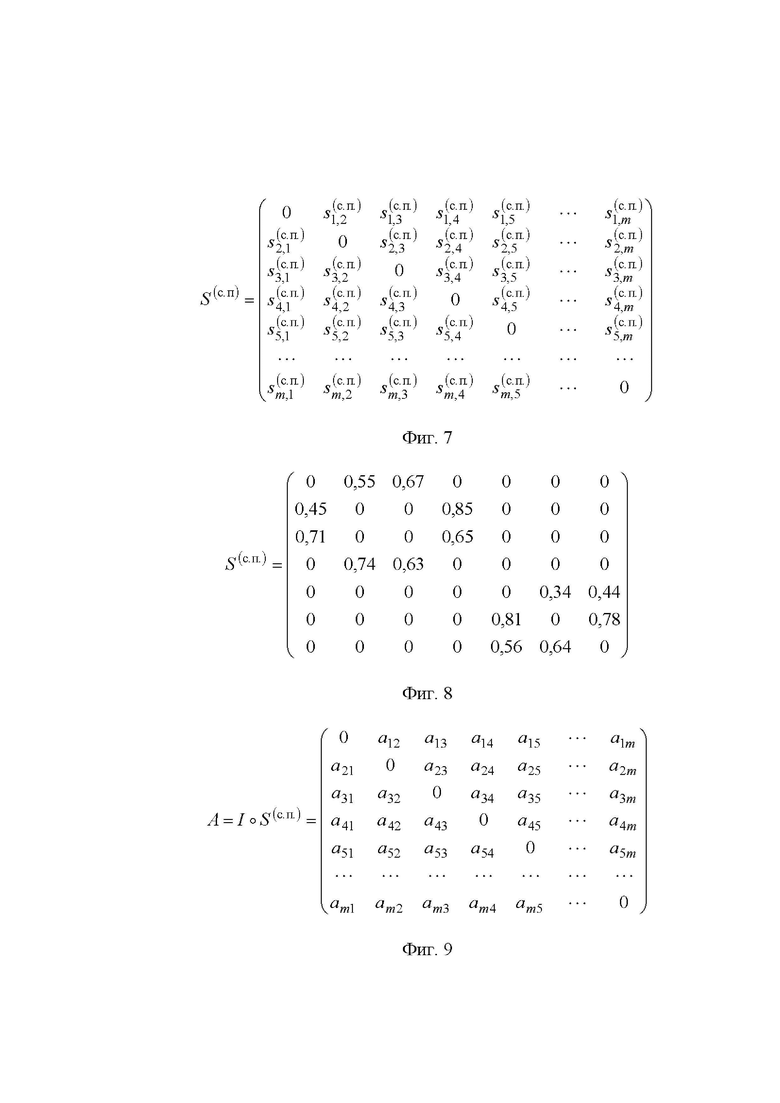
на фиг. 7 матрица полезности для БСС из т узлов;
на фиг. 8 практическое представление матрица полезности для БСС из 7 узлов;
на фиг. 9 обучающая матрица для БСС из т узлов;
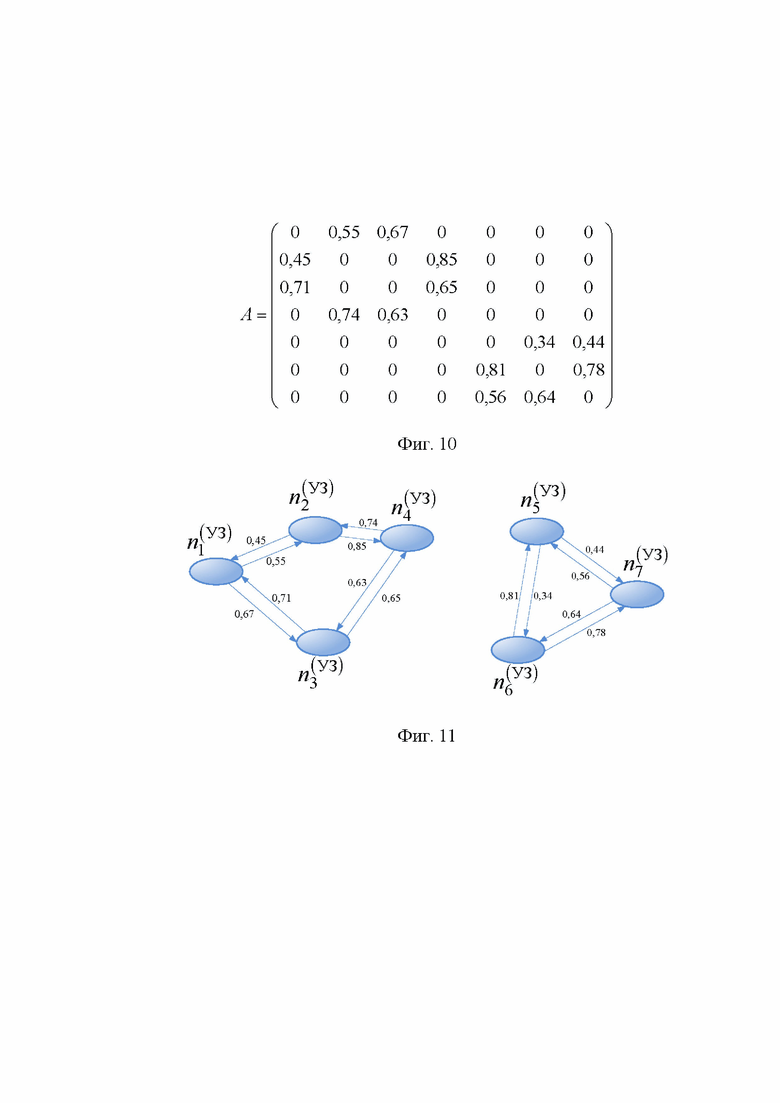
на фиг. 10 практическое представление обучающей матрицы для БСС из 7 узлов;
на фиг. 11 представление БСС из 7 узлов в виде взвешенного ориентированного графа в соответствии с обучающей матрицей.
Современные БСС представляют собой особый класс сетей, состоящих из большого числа распределенных в пространстве миниатюрных устройств n(УЗ) (узлов) с автономным питанием, объединенных между собой в единую сеть посредством беспроводного канала связи, на основе которого обеспечивается информационное взаимодействие между узлами БСС. Основными свойствами БСС являются: одноранговая топология; самоорганизация; масштабируемость; безопасная передача данных.
Внедрение в данное устройство измерительных функций или функций взаимодействия со сторонним оборудованием делает возможным использование БСС для решения задачи распределенного мониторинга и удаленного управления различными объектами и физическими процессами.
Данный класс сетей, как правило, построены на базе одноранговой физической топологии, что приводит к отсутствию центрального устройства, контролирующего все остальные устройства в сети. В данном случае каждый узел является независимым и выполняет одновременно роль и «клиента» (других устройств), и «сервера» (для других устройств) в рамках сети. В дополнение к этому, такая физическая топология обеспечивает отказоустойчивость сети.
В соответствии с требованием масштабируемости БСС должна иметь возможность легко подключить к себе новые узлы.
Под самоорганизацией подразумевается способность БСС, будучи целостной системой, реагировать на изменения окружающей среды путем изменения своих внутренних процессов, поведения и потоков данных. К подобного рода процессам относятся:
- маршрутизация сообщений между узлами сети (в том числе, маршрутизация сообщений в сети с мобильными узлами, иерархическая маршрутизация сообщений в сетях с изменяющейся доступностью узлов сети);
- кластеризация узлов БСС в соответствии с заданными параметрами.
Построение и поддержание работоспособности структуры БСС должно производиться автоматически с возможностью маршрутизации информационных сообщений между узлами БСС. Широкое распространение для обеспечения задач маршрутизации в БСС получили иерархические протоколы, в которых одной из основных задач является кластеризация узлов сети по заданным параметрам. Для проведения кластеризации узлов БСС необходимо определить параметры узлов, по которым проводится данная процедура.
Данные об узлах БСС представляются в виде соответствующих каждому узлу вектору технических параметров размерностью q

Элементами вектора технических параметров (фиг. 1) являются измеренные значения параметров узла БСС, например, такие как мощность радиосигнала  u-го узла относительно k-го узла БСС, оставшееся время функционирования
u-го узла относительно k-го узла БСС, оставшееся время функционирования  u-го узла в БСС, интенсивность информационного обмена
u-го узла в БСС, интенсивность информационного обмена  между u-ым узлом и k-ым узлом БСС.
между u-ым узлом и k-ым узлом БСС.
На основе измеренных значений параметра мощности радиосигнала каждого узла относительно остальных узлов БСС, собираются данные об энергетической видимости каждого узла сети относительно всех остальных узлов БСС. Данные представляются в виде матрицы энергетической видимости Р узлов БСС (фиг. 2), которая является аналогом матрицы расстояний. Матрица энергетической видимости Р узлов БСС представляет собой квадратную матрицу, где каждому узлу сети ставятся в соответствие другие узлы сети. Матрица имеет порядок m, где m - это количество узлов БСС. В качестве элементов матрицы используются значения мощности радиосигнала  u-го узла относительно k-го узла БСС выраженные в процентах
u-го узла относительно k-го узла БСС выраженные в процентах

где pu,k - значение энергетической видимости между u-ым и k-ым узлами БСС.
В качестве примера приведем матрицу энергетической видимости Р, состоящую из 7 узлов БСС (фиг. 3), где условно за бесконечность принимается 100% видимости узла БСС.
Выполним нормализацию значений матрицы энергетической видимости Р узлов БСС относительно максимального значения видимости 100% (фиг. 4).
Полученную нормализованную матрицу энергетической видимости Р узлов БСС преобразуем к матрице связности I узлов БСС (фиг. 5), таким образом, что значения нормализованной матрицы энергетической видимости Р узлов БСС отличные от нуля примут значение равное единице, а значения равные нулю останутся без изменений. При значении в матрице связности I равном нулю связь между соответствующими узлами БСС будет считаться потерянной.
Взаимосвязь между узлами БСС представляется в виде неориентированного графа (фиг. 6), сформированного в соответствии со значениями матрицы связности I узлов БСС.
Выполним измерение и значений параметров оставшегося времени функционирования каждого узла БСС и интенсивности информационного обмена между узлами БСС. Важно отметить, что каждому из указанных параметров назначается свой коэффициент значимости, причем 
Далее проведем нормализацию измеренных значений оставшегося времени функционирования каждого узла БСС и интенсивности информационного обмена между узлами БСС таким образом, чтобы они принимали значение в диапазоне от нуля до единицы. Это необходимо в дальнейшем при проведении кластеризации с использованием самоорганизующейся ИНС Кохонена.
На основе нормализованных значений оставшегося времени функционирования каждого узла БСС и интенсивности информационного обмена между узлами БСС с учетом назначенных коэффициентов значимости K1 и K2 выполняется вычисление обобщенного показателя собственной полезности s(с.п.) для каждого узла БСС

В основе процедуры вычисления обобщенного показателя собственной полезности используется метод линейной свертки значений указанных параметров с коэффициентами предпочтения [4].
На основе полученных значений обобщенного показателя собственной полезности для узлов БСС формируется матрица полезности S(с.п.) для БСС (фиг. 7). В качестве примера приведем матрицу полезности S(с.п.) для БСС, состоящую из 7 узлов (фиг. 8). Необходимо отметить, что значения обобщенного показателя собственной полезности для каждого узла БСС может быть различным в зависимости от текущих значений вектора технических параметров соответствующего узла сети.
Для учета всей совокупности значений вектора технических параметров каждого из узлов БСС выполним произведение Адамара полученных матрицы связности и матрицы полезности БСС, т.е. их поэлементное умножение. В результате данного произведения получим обучающую матрицу А для БСС (фиг. 9), где

В качестве примера приведем обучающую матрицу А для БСС, состоящую из 7 узлов (фиг. 10). Каждая строка обучающей матрицы А узлов БСС является входным вектором для самоорганизующейся ИНС Кохонена и несет информацию о каждом из узлов сети - в соответствии с параметрами энергетической видимости, оставшемся времени функционирования и интенсивности информационного обмена с другими узлами БСС.
Взаимосвязь между узлами БСС представляется в виде взвешенного ориентированного графа всей БСС на основе значений обучающей матрицы А (фиг. 11).
Рассмотрим алгоритм обучения самоорганизующейся ИНС Кохонена. Обучение самоорганизующейся ИНС Кохонена необходимо производить со следующими параметрами:
- количество входных нейронов N будет равняться количеству узлов БСС;
- количество нейронов слоя Кохонена (выходных нейронов) будет равняться согласно конструктивному методу обучения только лишь одному нейрону;
- начальное значение скорости обучения α0 и постоянную времени обучения τ зададим согласно [5] равными 0,7 и 1000 соответственно;
- радиус чувствительности R зададим в пределах от 0,22 до 0,36;
- точность обучения ε зададим 0,01;
- обучающей выборкой являются все узлы БСС.
Рассмотрим алгоритм обучения самоорганизующейся ИНС Кохонена по конструктивному методу с настроенными весовыми коэффициентами функций для кластеризации узлов БСС согласно [5-7]. Последовательно подаем на вход ИНС обучающие вектора Е1 - Em, которые являются строками обучающей матрицы А:
1) Если это первый входной вектор Е1 и первый внешний цикл обучения, то единственный существующий изначально в ИНС нейрон принимает значения этого вектора. Иначе, переходим к шагу 2.
2) Определяем нейрон-победитель для рассматриваемого на текущем шаге обучающего вектора. Нейроном-победителем будет тот нейрон, вектор весов которого в наименьшей степени отличается от вектора весов обучающего вектора. То есть расстояние между их векторами весов должно быть минимально. В качестве метрики используем Евклидово расстояние, которое вычисляем по следующему выражению:

где xi,j - значение i-го элемента j-го обучающего вектора, wi,j - значение веса i-го входа j-го нейрона.
3) Если d(xi,wi) не удовлетворяет условию  то в ИНС добавляется новый нейрон, который принимает значение этого входного вектора и переходим к шагу 1, где подаем на вход ИНС Кохонена следующий входной вектор. В противном случае происходит обучение нейрона согласно следующему шагу.
то в ИНС добавляется новый нейрон, который принимает значение этого входного вектора и переходим к шагу 1, где подаем на вход ИНС Кохонена следующий входной вектор. В противном случае происходит обучение нейрона согласно следующему шагу.
4) Подстраиваем весовые коэффициенты нейрона-победителя и близлежащих нейронов по следующему выражению:

где  - вектор весовых коэффициентов i-го нейрона, t - номер итерации обучения, х - входной обучающий вектор, α(t) - коэффициент скорости обучения.
- вектор весовых коэффициентов i-го нейрона, t - номер итерации обучения, х - входной обучающий вектор, α(t) - коэффициент скорости обучения.
На данном этапе происходит подстройка весов всех нейронов ИНС Кохонена. Величина изменения весов каждого нейрона зависит от произведения разности каждого веса и соответствующего значения входного обучающего вектора х на коэффициент скорости обучения α(t), который вычисляется в соответствии со следующим выражением

5) Если текущий обучающий вектор является последним вектором обучения Em, то проверяем, изменились ли веса каждого нейрона больше, чем на ε по отношению к предыдущему состоянию, после предыдущего прохождения последнего обучающего вектора. Если нет, то завершаем обучение сети. Если да, то переходим на первый шаг и начинаем обучение снова с первого обучающего вектора. После обучения, назначаем в качестве ГКУ центральные узлы каждого кластера.
На основе данных кластеризации формируются информационные направления связи для обеспечения межкластерного и внутрикластерного взаимодействия между узлами БСС. Под формированием информационных направлений связи понимается назначение маршрутов информационного обмена между узлами БСС (маршрутизация).
Реализация разработанного способа преимущественно целесообразна при использовании в БСС подвижных узлов, в ом числе расположенных на базе беспилотных летательных аппаратов, функционирующего условиях воздействия деструктивных факторов (в частности преднамеренных и непреднамеренных помех). Особенностью разработанного способа является использование совокупности значений технических параметров каждого узла БСС с назначенными им коэффициентами предпочтения.
По результатам имитационного моделирования повышение устойчивости информационного взаимодействия между узлами БСС и увеличение времени актуальности результатов кластеризации сети по сравнению со способом прототипом предположительно составляет 8…12% в зависимости от интенсивности воздействия деструктивных факторов и динамики изменения топологии сети.
Изобретение поясняется фигурами, которые не охватывают и тем более не ограничивают весь объем притязаний данного технического решения, а являются лишь иллюстрирующими материалами частного случая выполнения.
Источники информации
1. Махров С.С. Способ нейросетевой кластеризации беспроводной сенсорной сети. Патент №2571541 МПК H04W 40/24 (2009.01), H04W 84/18 (2009.01), G06N 3/08 (2006.01). Бюл. №35 от 20.12.2015. Заявка №2014125696/08 от 25.06.2014.
2. Махров С.С., Ерохин С.Д. Свидетельство о государственной регистрации программы для ЭВМ «Способ нейросетевой кластеризации беспроводной сенсорной сети» №2014660980 от 21.10.2014, правообладатели: Махров С.С., Ерохин С.Д.
3. Махров С.С. Автоматическое построение беспроводной сенсорной сети на основе искусственной нейронной сети // Мобильные телекоммуникации. - 2014, №6-7 (134). - С. 45-47.
4. Клецков Д.А., Бирюков Д.С. Особенности выбора структурных элементов информационного направления связи в децентрализованной сети передачи данных специального назначения на основе обобщенного показателя собственной полезности // Вопросы оборонной техники. Серия 16: Технические средства противодействия терроризму. - СПб: НПО СМ, 2023. - №3-4(177-178). - С. 55-64.
5. Баталов А.С. Методы повышения эффективности обучения нейронной сети Кохонена // Вестник Пермского университета. - Сер.: Математика. Механика. Информатика. - 2012. - Вып. 3 (11). - С. 86-93.
6. Кохонен, Т. Самоорганизующиеся карты: [монография] / ред. Ю.В. Тюменцев; пер. В.Н. Агеев; Т. Кохонен. - 4-е изд., электрон. - Москва: Лаборатория знаний, 2021. - 660 с.
7. Горбаченко В.И. Сети и карты Кохонена: [Электронный ресурс] // Научно-исследовательский центр самоорганизации и развития систем. М., 2010-2014. URL: http://gorbachenko.selforganization.ru/index.html (Дата обращения: 20.01.2024).
Изобретение относится к области беспроводных сетей и телекоммуникаций и может быть использовано в иерархических протоколах маршрутизации пространственно-распределенных самоорганизующихся беспроводных сенсорных сетей (БСС). Техническим результатом является повышение устойчивости информационного взаимодействия между узлами БСС за счет учета дополнительных параметров функционирования узлов сети и увеличение времени актуальности результатов кластеризации узлов БСС в условиях высокой динамики топологии БСС. Способ включает иерархическое деление структурных элементов БСС на головные и «ведомые» кластерные узлы с применением самоорганизующейся искусственной нейронной сети (ИНС) Кохонена, обучение которой осуществляется с использованием нормализованных значений обучающей матрицы БСС. Формирование обучающей матрицы БСС осуществляется путем вычисления произведения Адамара матрицы связности и матрицы полезности сети. Структура всей БСС описывается на основе матрицы полезности, представленной с помощью взвешенного ориентированного графа сети. Данные кластеризации БСС используются при формировании информационных направлений связи для обеспечения межкластерного и внутрикластерного взаимодействия между узлами БСС. 11 ил.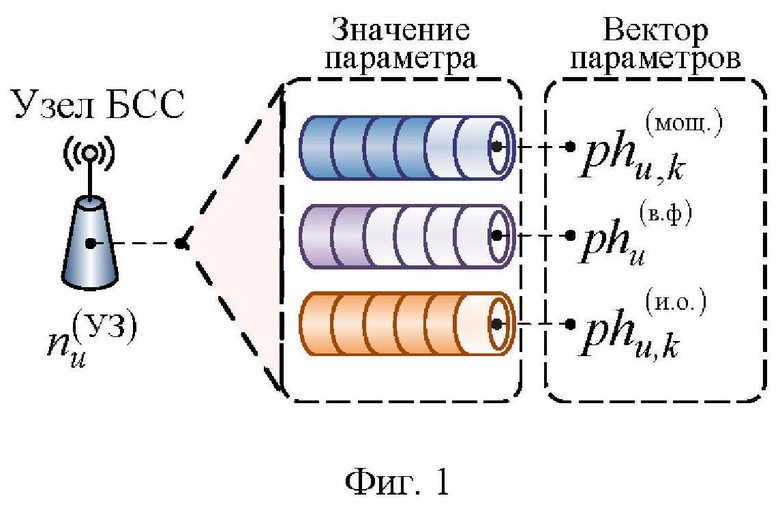
Способ нейросетевой кластеризации пространственно-распределенной беспроводной сенсорной сети (БСС), заключающийся в описании структуры БСС, кластеризации на основе самоорганизующейся искусственной нейронной сети (ИНС) Кохонена, обучающейся по конструктивному методу обучения, где количество нейронов самоорганизующейся ИНС Кохонена задается автоматически на основании отличия и подобия входных данных об узлах БСС, причем радиус чувствительности нейронов слоя Кохонена задается в пределах от 0,22 до 0,36, при этом автоматическая генерация нейронов не приводит к бесконечному росту их числа (числа кластеров), формировании информационных направлений связи, обеспечении межкластерного и внутрикластерного взаимодействия между узлами БСС, отличающийся тем, что при описании структуры БСС кроме данных о радиовидимости между узлами БСС дополнительно определяются значения оставшегося времени функционирования и интенсивности информационного обмена соответствующих узлов БСС, рассчитывается обобщенный показатель собственной полезности для каждого узла БСС, формируется матрица связности узлов БСС на основе значений нормализованной матрицы энергетической видимости (радиовидимости) между узлами БСС, создается неориентированный граф всей БСС на основе матрицы связности узлов БСС, формируется матрица полезности узлов БСС на основе значений обобщенного показателя собственной полезности узлов БСС, формируется обучающая матрица для БСС путем вычисления произведения Адамара матрицы связности и матрицы полезности узлов БСС, создается взвешенный ориентированный граф всей БСС на основе обучающей матрицы для БСС, обучение самоорганизующейся ИНС Кохонена выполняется на основе значений строк полученной обучающей матрицы для БСС.
| СПОСОБ НЕЙРОСЕТЕВОЙ КЛАСТЕРИЗАЦИИ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2014 |
|
RU2571541C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ БЕСПРОВОДНОЙ СЕНСОРНОЙ СЕТИ | 2013 |
|
RU2556423C2 |
| СПОСОБ РАЗВЕРТЫВАНИЯ СЕНСОРНОЙ СЕТИ И САМОКОНФИГУРИРУЕМАЯ СЕНСОРНАЯ СЕТЬ | 2010 |
|
RU2439812C1 |
| KR 101701951 B1, 02.02.2017 | |||
| CN 102244892 A, 16.11.2011 | |||
| CN 107743308 B, 05.05.2020. | |||

