Настоящее изобретение относится к системе управления летательного аппарата, в частности к средству управления электрическими устройствами гондолы, например, такими, как реверсор тяги.
Летательный аппарат приводится в движение несколькими реактивными двигателями, размещенными в гондоле, также содержащей ряд необходимых для работы гондолы вспомогательных устройств, таких, например, как реверсор тяги или противообледенительная система.
Назначение реверсора тяги состоит в повышении эффективности торможения летательного аппарата во время его посадки путем перенаправления вперед, по меньшей мере, части тяги, развиваемой турбореактивным двигателем.
На этом этапе реверсор тяги перекрывает поток выходящих из сопла газов и направляет этот поток к передней части гондолы, тем самым создавая обратную тягу, которая складывается с тормозящим действием шасси летательного аппарата.
Для достижения указанной переориентации потока могут применять разные средства в зависимости от типа реверсора. Однако в любом случае конструкция реверсора тяги включает в себя подвижные капоты, перемещаемые из открытого положения, в котором они открывают в гондоле канал, предназначенный для отклоненного потока, в закрытое положение, в котором они закрывают этот канал, и обратно. Эти подвижные капоты могут сами выполнять функцию отклонения или просто приводить в действие другие отклоняющие средства, такие как створки для перекрытия струи.
Другой важной частью электрооборудования гондолы реактивного двигателя является противообледенительная система для передней кромки воздухозаборника реактивного двигателя летательного аппарата, содержащая электрическую систему с сетью нагревательных элементов сопротивления, через которые протекает электрический ток.
Для гондол, в которых используются электрические системы, важным аспектом является осуществление контроля состояния указанных различных устройств гондолы и управления этими устройствами.
Используемые в настоящее время системы управления перемещаемыми элементами реверсора тяги включают по меньшей мере один узел электромеханических манипулирующих органов для манипулирования элементами реверсора тяги, выполненными с возможностью перемещения из открытого положения в закрытое положение и обратно. Манипулирующие органы управляются по меньшей мере одним электронным блоком управления, например, таким как электрический контроллер привода реверсора тяги ETRAS, электрически соединенным с блоком управления двигателем, например полностью автономной цифровой системой управления двигателем FADEC, предназначенным для управления соответствующим реактивным двигателя и контроля его состояния.
Указанный электронный блок управления представляет собой компьютер, специально предназначенный для управления гондолой или ее частью (например, перемещаемым элементом или определенным манипулирующим органом) и, в частности, предназначенный для преобразования команд на открытие или закрытие реверсора тяги, выдаваемых блоком FADEC, в последовательности команд управления для управления перемещаемыми элементами и соответствующими электромеханическими манипулирующими органами, а также для передачи в блок FADEC данных о состоянии манипулирующих органов и о положении перемещаемых элементов.
Несмотря на то что указанная система управления летательного аппарата обеспечивает автономное управление гондолой, она имеет недостатки.
По мере усложнения устройств летательного аппарата и, в частности, устройств гондолы бортовые компьютеры приобретают все больше дополнительных функций и количество взаимосвязей между этими бортовыми компьютерами, кабиной летательного аппарата и блоком FADEC увеличивается.
Обилие сложных компьютеров приводит к необходимости усложнения сети связи между разными компьютерами, а также системы электропитания, необходимой для их нормальной работы.
Таким образом, применение упомянутой системы управления связано с множеством требований, связанных с ее размерами и массой.
Действительно, увеличение количества механических или коммуникационных интерфейсов, а также требуемых электрических проводок и кабельных сборок приводит к увеличению массы и объема системы управления.
Кроме того, сложность упомянутой системы управления повышает вероятность отказа, увеличивая связанные с этим затраты на техническое обслуживание.
Задачей настоящего изобретения является решение вышеуказанных проблем.
Таким образом, имеется потребность в простой и надежной системе управления летательного аппарата, удовлетворяющей требованиям по ограничению ее массы и стоимости.
С этой целью в настоящем изобретении предложена система управления летательного аппарата, приводимого в движение по меньшей мере одним реактивным двигателем, размещенным в гондоле, отличающаяся тем, что она содержит:
- полностью автономный блок электронного управления реактивным двигателем, осуществляющий контроль состояния реактивного двигателя и выполненный с возможностью контроля состояния по меньшей мере одного электрического устройства гондолы и управления этим устройством, и
- блок электропитания гондолы, расположенный вне указанного полностью автономного блока электронного управления реактивным двигателем, осуществляющего контроль состояния реактивного двигателя, выполненный с возможностью управления электропитанием указанного электрического устройства гондолы.
В соответствии с частными вариантами осуществления изобретения система может включать один или более из следующих элементов, рассматриваемых порознь или в любых технически реализуемых комбинациях:
- указанное электрическое устройство гондолы представляет собой реверсор тяги, противообледенительное устройство или сопло с переменным сечением;
- полностью автономный блок электронного управления реактивным двигателем выполнен с возможностью управления перемещаемыми элементами реверсора тяги и электромеханическими манипулирующими органами, предназначенными для манипулирования указанными перемещаемыми элементами;
- полностью автономный блок электронного управления реактивным двигателем выполнен с возможностью формирования последовательностей команд управления приводами перемещаемых элементов реверсора тяги;
- полностью автономный блок электронного управления реактивным двигателем выполнен с возможностью управления датчиками положения, бесконтактными датчиками и/или детекторами состояния перемещаемых элементов и/или электромеханических манипулирующих органов;
- полностью автономный блок электронного управления реактивным двигателем выполнен с возможностью управления вторичным фиксатором перемещаемого элемента реверсора тяги;
- полностью автономный блок электронного управления реактивным двигателем и блок электропитания гондолы соединены посредством шины электропитания;
- блок электропитания гондолы содержит средства для выпрямления и фильтрации электрического тока, поступающего от электрической сети;
- блок электропитания гондолы выполнен с возможностью формирования последовательности команд управления первичным фиксатором и/или тормозом реверсора тяги;
Изобретение также относится к летательному аппарату, приводимому в движение по меньшей мере одним реактивным двигателем, размещенным в гондоле, содержащей вышеописанную систему управления.
Другие аспекты, задачи и преимущества изобретения станут понятны из нижеследующего подробного описания примерных вариантов его осуществления, не носящего ограничительного характера и сопровождаемого ссылками на прилагаемые чертежи, на которых:
- на Фиг.1 показана функциональная схема системы управления летательного аппарата, выполненной в соответствии с вариантом осуществления настоящего изобретения;
- на Фиг.2 показана функциональная схема блока питания, содержащегося в системе управления летательного аппарата, показанной на Фиг.1;
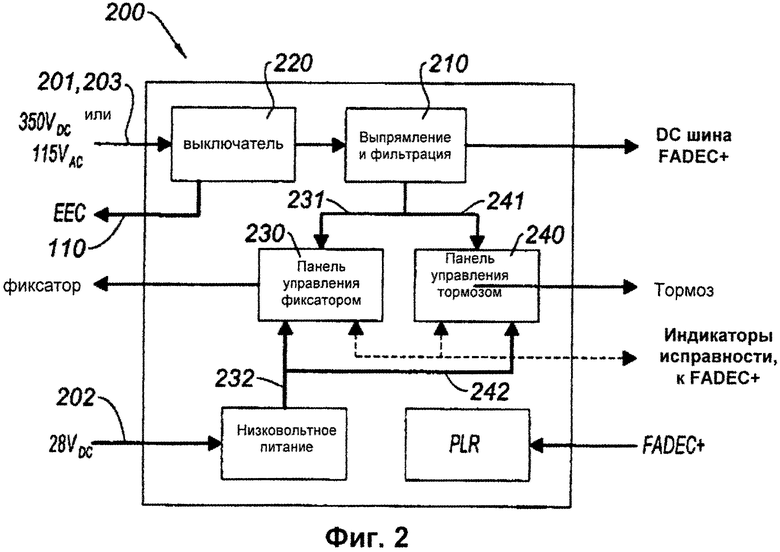
На Фиг.1 показана конфигурация системы 10 управления летательного аппарата, которая позволяет распределить функции, традиционно осуществляемые блоками управления, специально предназначенными для гондолы, между двумя системами, а именно: полностью автономным цифровым блоком 100 электронного управления реактивным(ными) двигателем(лями) летательного аппарата, далее называемым «блоком FADEC», расположенным в реактивном двигателе, в котором организовано прямое соединение между элементами управления гондолы и блоком 100, и так называемым блоком 200 электропитания, являющимся внешним по отношению к блоку FADEC.
Как показано на Фиг.1, система 10 управления летательного аппарата известным образом содержит блок 100 FADEC, осуществляющий контроль и управление всеми функциями, относящимися к реактивным двигателям летательного аппарата.
Блок 100 FADEC содержит электронный контроллер 110 двигателя, также называемый электронным устройством управления двигателем EEC, который управляет всеми функциями, относящимися к реактивному двигателю летательного аппарата, узел, состоящий из элементов, в данном случае собранных в блоке 120, обозначенном как «блок управления двигателем», и второй компьютер (не показан), отвечающий за управление наиболее важными функциями в случае отказа контроллера и предоставление информации, необходимой для технического обслуживания и программного обеспечения, необходимого для выполнения этих функций.
Следует отметить, что функции электронного контроллера 110 двигателя могут быть реализованы в одном или нескольких компьютерах.
Блок 100 также включает в себя блок 130 управления группой входов/выходов по току/напряжению, необходимых блоку FADEC для обеспечения функций контроля и управления реактивными двигателями, например, таких, как управление одним или несколькими приводами 131 и 132 реактивных двигателей.
Указанный блок 130 содержит, главным образом, соединители, средства для взаимодействия с приводами реактивного двигателя и средства взаимодействия с датчиками, относящимися к реактивному двигателю.
Блок 100 также включает в себя блок 160 для обработки параметров летательного аппарата, предназначенный для сбора всех параметров летательного аппарата, получаемых известным способом, через посредство концентраторов данных, по трактам А и В передачи информации.
В качестве не ограничивающих объем правовой охраны примеров функций, управляемых блоком 100 FADEC, можно упомянуть следующие функции: зажигание, пуск и останов реактивного двигателя, контроль тяги и обнаружение неисправностей, контроль входов/выходов блока FADEC, контроль реверсоров тяги и противообледенительной системы гондолы.
В соответствии с настоящим изобретением блок 100 FADEC также выполнен с возможностью управления напрямую по меньшей мере одним электрическим устройством гондолы летательного аппарата.
Под электрическим устройством понимается любое устройство гондолы, будь то силовое устройство или простой контрольно-измерительный элемент, относящийся к гондоле двигателя.
В качестве не носящих ограничительного характера примеров таких устройство можно указать реверсор тяги, противообледенительное/антиразмораживающее устройство или сопло с переменным сечением.
Под управлением «напрямую» в данном случае понимается управление, при котором данные не проходят через один или несколько промежуточных управляющих компьютеров, помимо контроллера 110 EEC, входящего в состав блока 100 FADEC, независимо от того, является ли такой промежуточный компьютер внешним устройством по отношению к блоку 100 FADEC или нет.
Таким образом, все функции управления гондолой осуществлены непосредственно внутри блока 100 FADEC посредством компьютера, который не является устройством, специально предназначенным для управления гондолой.
Ресурсы контроллера EEC 110, входящего в блок 100 FADEC, являются единственными ресурсами, используемыми для контроля различных функций электрических устройств гондолы (и управления ими), сосредоточенных в блоке 140 контроля и управления гондолой, входящем в блок FADEC и обозначенном как «системное программное обеспечение гондолы», который также включает пакет программ гондолы.
Эти ресурсы совместно используются для осуществления известных функций контроля и управления реактивными двигателями и функций контроля и управления электрическими устройствами гондолы.
Блок 100 FADEC, таким образом, полностью управляет гондолой и ее рабочими параметрами.
Блок 100 FADEC также осуществляет новые функции, связанные с управлением отдельными элементами электрического оборудования гондолы и, в частности, противообледенительной системы, капотов реверсора, реверсирующего устройства или системой для изменения сечения сопла.
В частности, в соответствии с одним из вариантов осуществления реверсор тяги содержит по меньшей мере один элемент, перемещаемый из положения закрытия в положение открытия и обратно, способствующий в положении открытия созданию реверсирования тяги, и по меньшей мере один узел электромеханических манипулирующих органов, предназначенных для манипулирования перемещаемыми элементами из положения закрытия в положение открытия и обратно.
В качестве не ограничивающих объем охраны примеров перемещаемого элемента можно привести капот гондолы, дверцы и/или реверсирующие створки, расположенные сзади или спереди капота гондолы по направлению потока.
Все электромеханические манипулирующие органы по существу включают электроприводы, предназначенные для приведения в действие перемещаемых элементов, по меньшей мере один электрический фиксатор, называемый первичным фиксатором, и предназначенный для удержания каждого перемещаемого элемента, а также детекторы состояния и датчики манипулирующих органов и перемещаемых элементов реверсора тяги.
Датчики могут представлять собой датчики положения и/или бесконтактные датчики.
Реверсор тяги может также содержать вторичные и третичные электрические фиксаторы и тормоз.
Указанный тормоз предназначен для торможения известным способом реверсора тяги в случае превышения скорости, связанного с отказом этого устройства. Это дает возможность избежать любых повреждений устройства.
Каждый связанный с перемещаемым элементом узел манипулирующих органов непосредственно соединен посредством линий управления с блоком 100 FADEC, в частности с блоком 140 контроля и управления, входящим в блок 100 FADEC, объединяющий все функции, относящиеся к гондоле.
Таким образом, в дополнение к инструкциям на открытие и закрытие реверсора тяги, и другим связанным с этим командам блок 100 FADEC посредством линий управления способен подавать непосредственно на выход блока 100 FADEC управляющие инструкции, соответствующие командам на выполнение следующих функций:
- управление 141 открытием/закрытием реверсора тяги, состоящее в формировании последовательностей команд управления приводами перемещаемых элементов;
- управление 142 датчиками положения створок и приводов, к которым он подключен непосредственно через линию управления, и детекторами состояния, позволяющими осуществлять контроль открытого или закрытого положения дверец и створок. Сигналы, соответствующие состоянию дверец и створок, непосредственно поступают в блок 100 FADEC, который соответствующим образом управляет связанными с гондолой двигателями в соответствии со стратегией управления, например, отключая или не отключая питание приводов;
- управление бесконтактными датчиками, распознающими заблокированное/разблокированное состояние фиксаторов. Сигналы, соответствующие состоянию фиксаторов, непосредственно поступают в блок 100FADEC;
- управление 143 вторичными фиксаторами перемещаемых элементов, для чего предусмотрено преобразование команд на открытие или закрытие перемещаемых элементов в последовательность команд управления вторичными фиксаторами.
Кроме того, блок 100 FADEC выполняет следующие функции:
- управление открытием/закрытием капотов, производимое посредством формирования последовательностей команд управления приводами капотов;
- управление изменениями сечения сопла, производимое посредством формирования последовательностей команд управления приводами сопла;
- обеспечение синхронизации перемещений капотов и створок в соответствии с определенным законом управления;
- управление устройствами, осуществляющими контроль состояния гондолы;
- контроль инверторов двигателей гондолы, которые регулируют ток фазы одного или нескольких двигателей, и управление этими инрверторами;
- преобразование команд на размораживание/антиразмораживание в последовательность команд управления электрическими цепями гондолы, относящимися к противообледенительным системам или системам антиразмораживания.
Часть этой информации может быть непосредственно передана в кабину летательного аппарата через соответствующий интерфейс.
Кроме того, блок 140 контроля и управления гондолой подключен к блоку 170 технического обслуживания.
Указанный блок 170 технического обслуживания содержит интерфейс, который, с одной стороны, обеспечивает извлечение данных, сохраненных во внутренней памяти блока 140 контроля и управления, и, с другой стороны, допускает обновление программного обеспечения гондолы, содержащегося в указанном блоке 140.
Что касается третичного фиксатора, предназначенного для восприятия нагрузки перемещаемых элементов в случае отказа первичного и вторичного фиксаторов, то он может напрямую управляться из кабины летательного аппарата или из блока 100 FADEC.
Благодаря передаче функций управления, относящихся к гондоле и, в частности, функций, связанных с реверсом тяги, в блок 100 FADEC и объединению управления капотами и створками реверсора тяги в блоке 100 FADEC удается настолько упростить электрическую конфигурацию всей силовой установки, что появляется возможность уменьшить количество компьютеров, участвующих в ее работе.
Следовательно, уменьшается число узлов управления питанием и контроля состояния, а также количество электрических и механических средств сопряжения.
Количество проводок и соединителей также значительно уменьшается, что влечет за собой сокращение количества соединительных плат.
Поскольку команды обрабатываются внутри блока 100 FADEC, устраняется необходимость в обмене данными между компьютерами, специально предназначенными для гондолы, и блоком FADEC, как это предусмотрено в конфигурациях, известных из уровня техники, что устраняет необходимость в соответствующих коммуникационных процедурах и интерфейсах.
Кроме того, уменьшается время вычисления и время отклика.
Благодаря оптимизации электрической конфигурации силовой установки уменьшаются масса и объем силовой установки.
Применение описанного выше блока 100 FADEC также позволяет снизить операционные и эксплуатационные расходы.
Кроме того, схема электрического питания летательного аппарата содержит блок 150 электропитания, расположенный внутри блока FADEC, соединенный с по меньшей мере одним входом электропитания.
Указанный блок 150, таким образом, питает электрооборудование реактивных двигателей, в частности, такое как датчики и приводы.
В соответствии с вариантом осуществления изобретения цепь электропитания включает несколько входов электропитания в блок 150 электропитания: один вход 151 переменного напряжения от сети летательного аппарата, составляющего, как правило, 115 вольт, и другой вход 152 низкого напряжения, составляющего, например, 28 В постоянного напряжения.
В соответствии с изобретением питанием электрического оборудования, расположенного вблизи реактивного двигателя и, в частности, электрических устройств гондолы, управляет блок 200, так называемый «блок электропитания гондолы» ENPU, более подробно показанный на Фиг.2.
Указанный блок 200, расположенный вне блока 100 FADEC, подключен к последнему посредством по меньшей мере одной шины 20 электропитания.
Указанный блок 200 не содержит какого-либо программного обеспечения и предназначен в основном для управления электрическим питанием устройств гондолы, и в частности, органов манипулирования перемещаемыми элементами реверсора тяги путем обеспечения электропитания блока 140 контроля и управления гондолой, входящего в состав блока 100 FADEC.
В частности, блок 200 ENPU позволяет изолировать функции, относящиеся к интерфейсу электрической сети.
Указанный блок 200 подключен к блоку 140 контроля и управления блоком FADEC посредством индикаторов 180 исправности, имеющих вид переменных, указывающих на исправность блока 200 ENPU.
Благодаря указанным индикаторам 180 появляется возможность отказаться от сложной цифровой шины и избежать сложностей, возникающих при совместном управлении блоком 200 ENPU и блоком 100 FADEC.
Кроме того, блок 200 ENPU соединен с различными входами электропитания.
Таким образом, блок 200 ENPU содержит один или несколько входов, соединенных посредством линии с электрической сетью летательного аппарата.
Блок 200 ENPU таким образом может получать напряжение 201 переменного тока, поступающее от указанной сети, величиной, как правило, 115 вольт и низкое постоянное напряжение 202 величиной 28 вольт.
Он также может получить постоянное напряжение 203 непосредственно из кабины; как правило, его величина составляет 350 вольт.
В случае когда электрическая сеть летательного аппарата представляет собой сеть переменного тока, блок 200 ENPU обеспечивает выпрямление и фильтрацию 210 этого тока с целью предоставить постоянное электрическое напряжение в блок FADEC 100 через шину 20 электропитания.
Блок 200 ENPU преобразует и, таким путем, адаптирует электрический сигнал от сети летательного аппарата так, чтобы обеспечить регулируемое постоянное напряжение (от 115 вольт и до, примерно, 270 вольт) для питания электрических двигателей органов манипулирования электрическими устройствами гондолы.
Кроме того, блок 200 ENPU содержит выключатель 220, предназначенный для отключения электрического питания блока в случае проведения технического обслуживания блока 110 EEC, входящего в блок 100 FADEC.
Блок 200 ENPU также содержит органы 230, 240 управления для первичного фиксатора и/или тормоза перемещаемых элементов реверсора тяги гондолы для обеспечения разделения указанных защитных линий.
Поскольку фиксаторы и тормоза являются электрически управляемыми, их питание осуществляется через блок 200 EN PL) посредством выпрямленного и отфильтрованного переменного напряжения или постоянного напряжения с помощью соответствующих линий 231, 241 и 232, 242 подачи питания, как описано выше.
Кроме того, блок 200 ENPU также обеспечивает управление разрядным сопротивлением или PLR двигателей гондолы, требуемое, когда последние находятся в фазе генерации.
Безусловно, изобретение не ограничено вариантами осуществления, описанными выше на примере реверсора тяги, но, напротив, оно охватывает все возможные варианты.
Изобретение относится к энергетике. Система управления летательного аппарата, приводимого в движение по меньшей мере одним реактивным двигателем, размещенным в гондоле. Система управления содержит: полностью автономный блок электронного управления реактивным двигателем, предназначенный для контроля состояния реактивного двигателя и выполненный с возможностью контроля состояния по меньшей мере одного электрического устройства гондолы и управления указанным устройством напрямую. При этом предусмотрен блок электропитания гондолы, расположенный вне указанного полностью автономного блока электронного управления реактивным двигателем, предназначенного для контроля состояния реактивного двигателя, и выполненный с возможностью управления электропитанием указанного электрического устройства гондолы. Также представлен летательный аппарат, содержащий систему управления согласно изобретению. Изобретение позволяет уменьшить массу и объём системы управления, а также сократить затраты на техническое обслуживание. 2 н. и 8 з.п. ф-лы, 2 ил.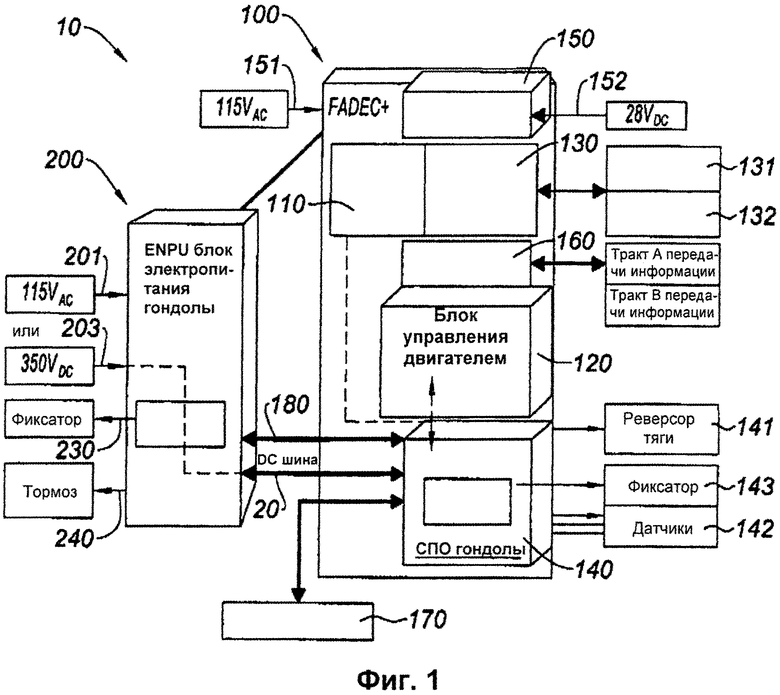
1. Система (10) управления летательного аппарата, приводимого в движение по меньшей мере одним реактивным двигателем, размещенным в гондоле, отличающаяся тем, что содержит: полностью автономный блок (100) электронного управления реактивным двигателем, осуществляющий контроль состояния реактивного двигателя и выполненный с возможностью контроля состояния по меньшей мере одного электрического устройства гондолы и управления этим устройством напрямую, и блок (200) электропитания гондолы, расположенный вне указанного полностью автономного блока электронного управления реактивным двигателем, осуществляющего контроль состояния реактивного двигателя, выполненный с возможностью управления электропитанием указанного электрического устройства гондолы.
2. Система по п. 1, отличающаяся тем, что указанное электрическое устройство гондолы представляет собой реверсор тяги, противообледенительное устройство или сопло с переменным сечением.
3. Система по п. 2, отличающаяся тем, что полностью автономный блок (100) электронного управления реактивным двигателем выполнен с возможностью управления перемещаемыми элементами реверсора тяги и электромеханическими манипулирующими органами, предназначенными для манипулирования указанными перемещаемыми элементами.
4. Система по п. 3, отличающаяся тем, что полностью автономный блок (100) электронного управления реактивным двигателем выполнен с возможностью формирования последовательностей команд управления приводами перемещаемых элементов реверсора тяги.
5. Система по п. 3, отличающаяся тем, что полностью автономный блок (100) электронного управления реактивным двигателем выполнен с возможностью управления датчиками положения, бесконтактными датчиками и/или детекторами состояния перемещаемых элементов и/или электромеханических манипулирующих органов.
6. Система по п. 3, отличающаяся тем, что полностью автономный блок (100) электронного управления реактивным двигателем выполнен с возможностью управления вторичным фиксатором перемещаемого элемента реверсора тяги.
7. Система по п. 1, отличающаяся тем, что полностью автономный блок (100) электронного управления реактивным двигателем и блок (200) электропитания гондолы соединены посредством шины электропитания.
8. Система управления по п. 1, отличающаяся тем, что блок (200) электропитания гондолы содержит средства для выпрямления и фильтрации электрического тока, поступающего от электрической сети.
9. Система по п. 2, отличающаяся тем, что блок (200) электропитания гондолы выполнен с возможностью формирования последовательностей команд управления первичным фиксатором и/или тормозом реверсора тяги.
10. Летательный аппарат, приводимый в движение по меньшей мере одним реактивным двигателем, размещенным в гондоле, содержащий систему (10) управления по любому из пп. 1-9.
| WO 2006134253 A1, 21.12.2006 | |||
| US 5394689 A1, 07.03.1995 | |||
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ РЕВЕРСОР ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ С СИСТЕМОЙ АВТОМАТИЧЕСКОГО РЕГУЛИРОВАНИЯ СТВОРОК | 2003 |
|
RU2323360C2 |
| WO2009034246 A2, 19.03.2009 | |||
| СИСТЕМА ЭЛЕКТРИЧЕСКОГО УПРАВЛЕНИЯ ДЛЯ УСТРОЙСТВА РЕВЕРСИРОВАНИЯ ТЯГИ ТУРБОРЕАКТИВНОГО ДВИГАТЕЛЯ | 1997 |
|
RU2142569C1 |
| FR 2897339 A1, 17.08.2007 | |||

