Область техники
Настоящее изобретение, в общем, относится к пневматической хирургической системе. Более конкретно, но без ограничения, настоящее изобретение относится к пневматическому генерированию в хирургической системе.
Описание предшествующего уровня техники
Витрео-ретинальные процедуры могут включать в себя различные хирургические процедуры, выполняемые для восстановления, сохранения и улучшения зрения. Витрео-ретинальные процедуры могут быть назначены для лечения множества серьезных состояний задней части глаза. Витрео-ретинальные процедуры позволяют лечить такие состояния, как возрастная дегенерация желтого пятна (AMD, ВДЖ), диабетическая ретинопатия и диабетическое кровоизлияние в стекловидное тело, макулярное отверстие, отслоение сетчатки, эпиретинальная мембрана, CMV (ЦМВ, цитомегаловирусный) ретинит и множество других офтальмологических состояний.
Стекловидное тело обычно является прозрачным, гелеподобным веществом, которое заполняет центр глаза. Оно может занимать приблизительно 2/3 объема глаза, придавая ему форму, еще до рождения. Определенные проблемы, оказывающие влияние на заднюю сторону глаза, могут потребовать витрэктомии или хирургического удаления стекловидного тела.
Витрэктомия может быть выполнена для удаления крови и различных остатков из глаза, для удаления рубцовой ткани или для облегчения силы вытягивания, действующей на сетчатку. Кровь, инфицирующие клетки, различные остатки и рубцовая ткань могут затенять свет, по мере его прохода через глаз на сетчатку, в результате чего получается расплывчатое зрение. Стекловидное тело также может быть удалено, если оно вытягивает или выталкивает сетчатку из ее нормального положения. Некоторые из наиболее распространенных расстройств зрения, которые могут потребовать витрэктомию, включают в себя осложнения после диабетической ретинопатии, такие как отслоение сетчатки или кровотечение, макулярное отверстие, отслоение сетчатки, преретинальный фиброз мембраны, кровотечение внутри глаза (кровотечение внутриглазного яблока), повреждения или инфекция и определенные проблемы, относящиеся к предыдущей хирургии глаза.
Хирург при проведении операции глазного яблока может выполнять витрэктомию с помощью микроскопа и специальных линз, разработанных для обеспечения четкого изображения задней стороны глаза. Несколько мелких надрезов длиной только несколько миллиметров могут быть выполнены на склере. Хирург глазного яблока может вставлять микрохирургические инструменты через эти надрезы, такие как оптоволоконный источник света для освещения внутренней части глаза, инфузионную линию для поддержания формы глаза во время хирургической операции, и инструменты для разреза и удаления стекловидного тела.
В ходе витрэктомии хирург может выполнить три мелких надреза в глазу для трех отдельных инструментов. Эти надрезы могут быть размещены в pars plana глаза, которая расположена сразу позади радужной оболочки, но перед сетчаткой. Инструменты, которые проходят через эти надрезы, могут включать в себя световодную трубку, инфузионный порт и устройство для надреза для витрэктомии. Световодная трубка представляет собой эквивалент микроскопического карманного фонарика с высокой интенсивностью, предназначенного для использования внутри глаза. Инфузионный порт может использоваться для замены жидкости в глазу и поддержания требуемого давления внутри глаза, витректор или режущее устройство может работать, как крошечная гильотина с колеблющимся микроскопическим резаком для удаления геля глазного яблока управляемым образом. Это позволяет предотвратить существенное натяжение сетчатки во время удаления стекловидного тела.
Хирургическое устройство, используемое для выполнения витрэктомии и других хирургических операций при последующем лечении глаза, является очень сложным. Как правило, такое офтальмологическое хирургическое устройство включает в себя основную консоль, на которой закреплено множество различных инструментов. Основная консоль может обеспечить питание для управления работой присоединенных инструментов.
Присоединенные инструменты обычно включают в себя зонды, ножницы, хирургические щипцы, осветители, витректоры и инфузионные линии. Каждый из этих инструментов обычно присоединен к основной хирургической консоли. Компьютер в основной хирургической консоли может отслеживать и управлять работой этих инструментов. Такие инструменты также могут получать питание от основной хирургической консоли. Некоторые из этих инструментов могут иметь электрическое питание, в то время как другие могут получать пневматическое питание.
Для подачи пневматической энергии к различным инструментам, основная хирургическая консоль может включать в себя пневматический модуль или модуль распределения воздуха. Такой пневматический модуль может выполнять обработку и подачу сжатого воздуха или газа для подачи энергии к инструментам. Пневматический модуль может быть соединен с цилиндром, который содержит сжатый газ. Пневматический модуль может обеспечивать требуемое давление газа для правильной работы присоединенных инструментов.
Сущность изобретения
В различных вариантах осуществления клапаном пневматической системы для хирургической консоли можно управлять с помощью контроллера, выполненного с возможностью регулировать рабочий цикл клапана (VDC) для уменьшения разности между перепадом давления (например, средним перепадом давления) на выходе клапана и требуемым перепадом давления (например, требуемым средним перепадом давления). В некоторых вариантах осуществления средние перепады давления могут быть детектированы и могут быть переданы от датчика давления, соединенного с одним или больше портами клапана, в контроллер, воплощающий алгоритм (например, контроллера PID, пропорционально-интегрального дифференциального регулирования). Контроллер может сравнивать измеренный средний перепад давлений с требуемым средним перепадом давления (например, принятым от пользователя или определенным на основе информации, принятой от пользователя). Контроллер может затем определять модифицированный VDC, для уменьшения разности между требуемым средним перепадом давления и измеряемым средним перепадом давления. В некоторых вариантах осуществления множество итераций могут быть выполнены для уменьшения разности между измеряемым средним перепадом давления и требуемым средним перепадом давления.
Краткое описание чертежей
Для более полного понимания настоящего изобретения будет сделана ссылка на следующее описание, которое следует рассматривать совместно с приложенными чертежами, на которых:
на фиг. 1 показана хирургическая консоль, в соответствии с вариантом осуществления;
на фиг. 2a показана схема пневматической системы с датчиком перепада давления, в соответствии с вариантом осуществления;
на фиг. 2b показана схема пневматической системы с отдельными датчиками давления в каждом порту, в соответствии с вариантом осуществления;
на фиг. 3 показан резец для витрэктомии, в соответствии с вариантом осуществления;
на фиг. 4 показана блок-схема последовательности операций способа для управления пневматическим клапаном, в соответствии с вариантом осуществления;
на фиг. 5 показан вариант осуществления таблицы поиска для корреляции рабочего цикла порта со средним перепадом давления, в соответствии с вариантом осуществления; и
на фиг. 6 показан вариант осуществления с пневматическим клапаном, включающим в себя два или больше клапана.
Следует понимать, что, как представленное выше общее описание, так и следующее подробное описание изобретения представляют собой примеры и пояснения и предназначены только для дальнейшего пояснения настоящего изобретения, в том виде, как оно заявлено.
Подробное описание изобретения
Публикация заявки на патент США под названием “Pneumatic System for a Vitrector,” публикация № 20080149197, регистрационный № 11/614678, by Denis Turner, Robert Palino, Argelio Olivera and Mark Hopkins, поданная 21 декабря 2006 г., включена здесь полностью посредством ссылки, как если бы она была здесь полностью описана.
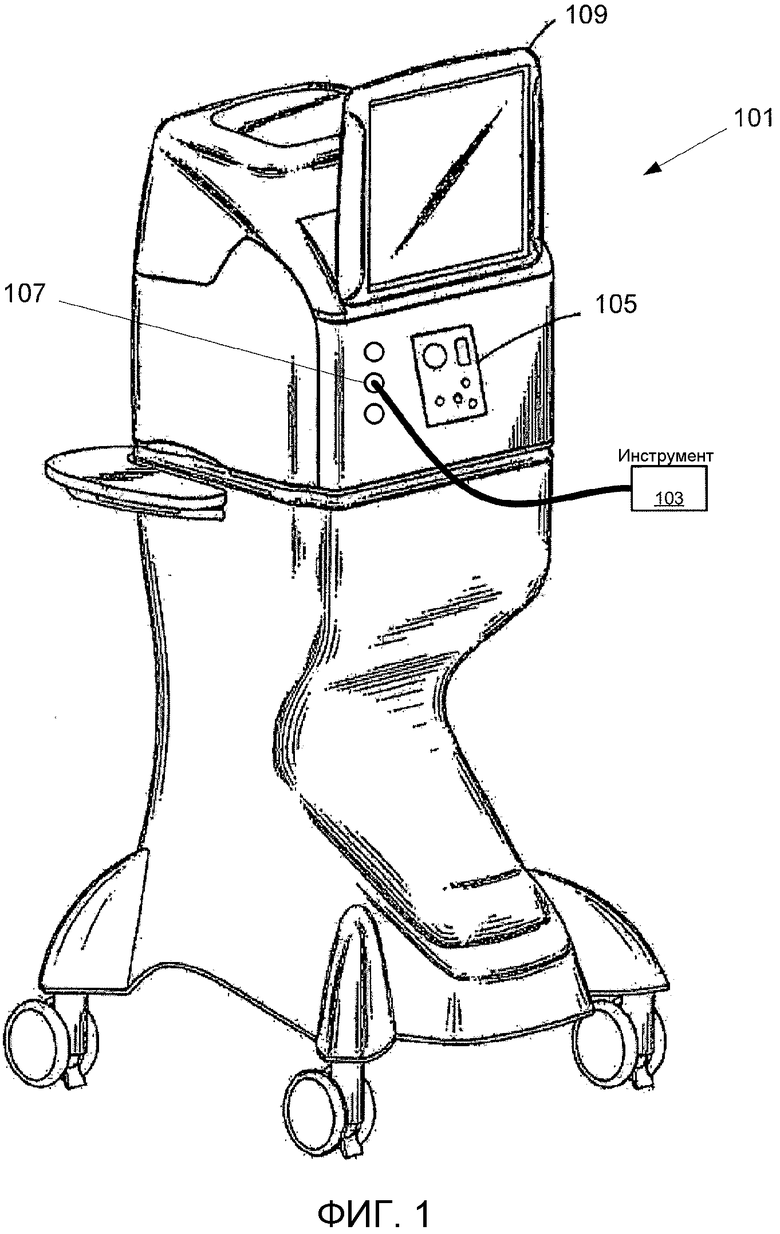
На фиг. 1 иллюстрируется вариант осуществления хирургической консоли 101 для офтальмологического хирургического устройства с пневматическим питанием. Хирургическая консоль 101 может быть выполнена с возможностью управления одним или больше пневматическими инструментами 103. Инструменты 103 могут включать в себя, например, ножницы, витректоры, щипцы и модули инжекции или удаления. Другие инструменты 103 также могут использоваться. Во время работы офтальмологическое хирургическое устройство с пневматическим питанием по фиг. 1 может работать для помощи хирургу при выполнении различных офтальмологических операций, таких как витрэктомия. Сжатый газ, такой как азот, может обеспечивать питание через хирургическую консоль 101 для питания инструментов 103. Хирургическая консоль 101 может включать себя дисплей 109 для отображения информации для пользователя (дисплей также может включать в себя сенсорный экран для приема команд, вводимых пользователем). Хирургическая консоль 101 также может включать в себя модуль 105 струйной автоматики (например, для поддержания функций ирригации/аспирации) и один или больше соединителей 107 порта для соединения с инструментами 103 (например, подключения через пневматические линии, закрепленные на инструментах 103).
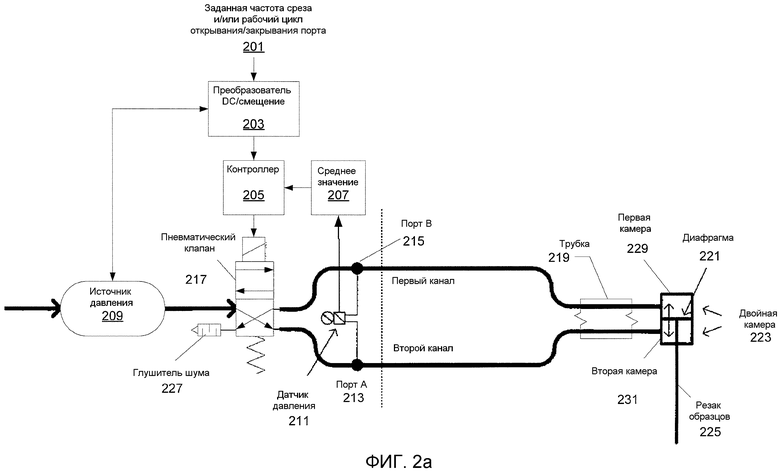
На фиг. 2 показана схема пневматической системы для устройства для витрэктомии с пневматическим питанием, в соответствии с вариантом осуществления. Как можно видеть на фиг. 2, пневматическая система может включать в себя один или больше пневматических клапанов 217, подключающих источник 209 давления (например, регулируемый источник давления, такой как пневматический цилиндр, или источник воздуха в стенной розетке) к выходному порту А 213 и выходному порту B 215 (выходной порт А 213 и выходной порт B 215 могут быть соединены с инструментом 103 через один или больше соединителей 107 порта). В некоторых вариантах осуществления пневматическим клапаном 217 может управлять с помощью контроллера 205. В некоторых вариантах осуществления давление источника 209 давления также может регулироваться контроллером 205 или отдельным контроллером (например, внутренним для хирургической консоли 101). Контроллер 205 может регулировать давление (например, для определения баланса между низким давлением для уменьшения потребления воздуха и высоким давлением для быстрой скорости резания и/или для увеличения динамического диапазона доступных скоростей резания). В некоторых вариантах осуществления компоненты пневматической системы могут быть встроены в коллектор (например, полученный в результате механической обработки металла, такого как алюминий). Коллектор может быть воздухонепроницаемым и может включать в себя различные фитинги и разъемы, и может быть выполнен с возможностью выдерживать относительно высокое давление газа. Коллекторы могут быть изготовлены, как отдельные части, или они могут быть изготовлены, как единая деталь. В различных вариантах осуществления компоненты пневматической системы (например, в коллекторе) могут быть встроены внутри хирургической консоли 101.
В некоторых вариантах осуществления пневматический клапан 217 может представлять собой четырехходовый клапан. Другие конфигурации клапана также предусматриваются. Клапан 217 может включать в себя соленоид, который во время работы перемещает клапан 217 в одно из двух положений (например, см. фиг. 2a-b), будучи направляемым сигналами управления от контроллера 205. В первом положении пневматический клапан 217 может обеспечить возможность протекания газа под давлением через пневматический клапан 217 в выходной порт B 215 для обеспечения пневматического питания для резака 225 образцов, выпуская газ под давлением из выходного порта 213 через глушитель 227 шума. Во втором положении клапан 217 может подавать газ под давлением в выходной порт А 213 и выпускать газ под давлением через выходной порт B 215. В этом положении газ под давлением может проходить через выходной порт 213, обеспечивая пневматическое питание для инструмента 103 (например, резака 225 образцов). Таким образом, когда пневматический клапан 217 находится в первом положении, первая камера 229 двойных камер 223 может быть заряжена, в то время как вторая камера 231 может быть разряжена. Когда пневматический клапан 217 находится во втором положении, вторая камера 231 может быть заряжена, в то время как первая камера 229 может быть разряжена.
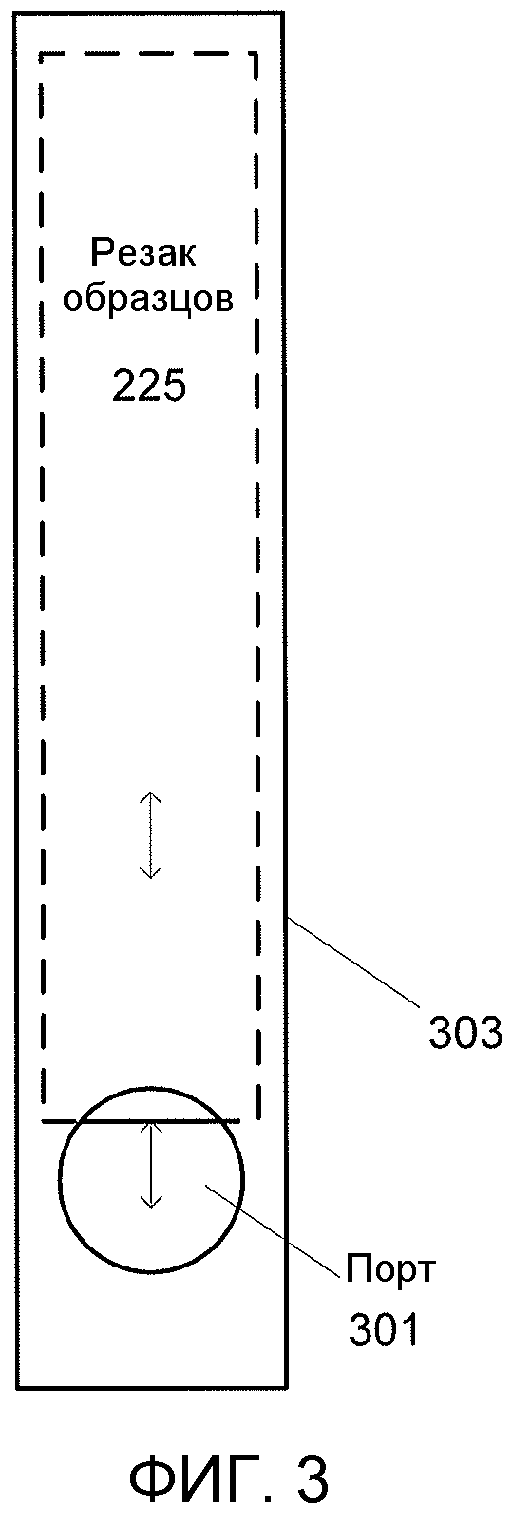
Как можно видеть на фиг. 3, резак 225 образцов может действовать как режущее устройство. Резак 225 образцов может выполнять возвратно-поступательные движения внутри внешней трубки 303 с портом 301 резака (например, резак 225 образцов может перемещаться с помощью диафрагмы 221, которая, в свою очередь, выполняет колебательные движения, по мере того, как газ под давлением поочередно направляет выходные порты A и B (и в соответствующие камеры двойной камеры 223)). В некоторых вариантах осуществления резак 225 образцов может быть закреплен на выходных портах A и B через трубку 219 (могут также использоваться отдельные трубки для каждого порта). Поскольку резак 225 образцов двигается вперед-назад, резак 225 образцов может поочередно открывать и закрывать порт 301 резака заостренным кончиком резака 225 образцов. Каждый цикл резака 225 образцов через внешнюю трубку 303 может отрезать материал, такой, как стекловидное тело, в порту 301 резака, в то время как резак 225 образца закрывается. Рабочий цикл (PDC) порта может обозначать период времени, в течение которого порт 301 резака открыт и закрыт. Например, PDC 49% может обозначать, что порт 301 резака открыт 49% продолжительности цикла (и закрыт 51% продолжительности цикла - продолжительность цикла составляет, например, период времени между каждым последовательным открыванием порта 301 резака).
В некоторых вариантах осуществления рабочий цикл (VDC) клапана может включать в себя период времени, в течение которого пневматический клапан 217 находится в первом и втором положениях. В некоторых вариантах осуществления скоростью резания резака 225 образцов можно управлять с помощью контроллера 205 через клапан 217. Например, для обеспечения скорости отбора образцов 2500 срезов в минуту, контроллер 205 может управлять пневматическим клапаном 217 для подачи воздуха под давлением поочередно в порт А (второй канал) и в порт B (первый канал) со скоростью приблизительно 24 мс за цикл. Для получения скорости резания 2500 срезов в минуту два пневматических канала могут циклически открываться/закрываться каждые 24 мс (2500 срезов/минуту или 1 минута/2500 срезов * 60 секунд /1 минуту = 0,024 секунды/срез = 24 мс/срез), которые могут открывать каждый канал на 12 мс. В некоторых вариантах осуществления время перехода для фактического открывания и закрывания каналов может использовать часть продолжительности цикла. Например, для пневматического второго канала (то есть, через порт А 213 пневматического клапана 217), может потребоваться 4 мс на открывание (в то время, как закрывается пневматический первый канал), и 2 мс для закрывания (в то время, как открывается пневматический первый канал) с получением полного времени перехода 6 мс для цикла 24 мс. Другие времена перехода также могут быть рассмотрены. Учитывая время перехода, клапан может фактически быть открыт только 8 мс (12 мс - 4 мс) во второй канал, в то время как он закрыт для первого канала и может быть закрыт на 10 мс (12 мс - 2 мс) для второго канала, в то время как он будет открыт для первого канала. Такая разность временных характеристик клапана в 8 мс по сравнению с 10 мс при подаче воздуха под давлением воздуха во второй канал и в первый канал может привести к несбалансированным перепадам давлений в двух каналах. В некоторых вариантах осуществления может быть желательным, чтобы длительность открывания двух каналов была приблизительно одинаковой (например, в случае 2500 срезов/минуту, фактически они должны быть открыты (приблизительно 24 мс - 6 мс)/2 = 9 мс).
Если бы время перехода открывания/закрывания было постоянным для всех пневматических клапанов 217, тогда контроллер 205 мог бы быть перепрограммирован с фиксированным рабочим циклом клапана для достижения приблизительно равных фактических длительностей времени открытого состояния для обоих каналов на основе стандартного пневматического клапана 217. Например, номинальное время открывания может быть установлено 13 мс для второго канала и 11 мс для первого канала. Таким образом, для данного примера, исключая время перехода, фактическое время открытого состояния второго канала может составлять 13 мс - 4 мс = 9 мс, и фактическое время открытого состояния первого канала может составлять 11 мс - 2 мс = 9 мс (аналогично второму каналу). Однако, поскольку время перехода может изменяться между различными пневматическими клапанами 217 (например, из-за производственных вариаций, ограничения потока, температура, старения и т.д. пневматического клапана 217), фиксированный рабочий цикл клапана, может не обеспечивать успешное противодействие несбалансированности. Например, для разных клапанов может потребоваться 3 мс (вместо 4 мс) на открывание второго канала (в то время как пневматический первый канал закрывается) и 2 мс на закрывание второго канала (в то время как пневматический первый канал открывается). Если бы одинаковый рабочий цикл клапана (например, 13 мс номинального времени на открытое состояние для второго канала и 11 мс номинального времени на открытое состояние для первого канала) был применен к этому второму примеру клапана, фактическое время открытого состояния для пневматического второго канала второго клапана составило бы 13 мс - 3 мс = 10 мс, и фактическое время открытого состояния для первого канала составило бы 11 мс - 2 мс = 9 мс. Поэтому рабочий цикл клапана, который работал в предыдущем примере клапана, приводит к тому, что пневматический второй канал фактически остается открытым на 1 мс или на 11% дольше, чем пневматический первый канал, для второго примера клапана. Эта разность может привести к неоднородному балансу питания между двумя пневматическими каналами, что может привести к менее желательным рабочим характеристикам. Аналогично, фиксированный рабочий цикл клапана может не обеспечивать успешное противодействие несбалансированности, вызванной ограничениями потока/вариациями сопротивления в двух каналах от консоли к консоли.
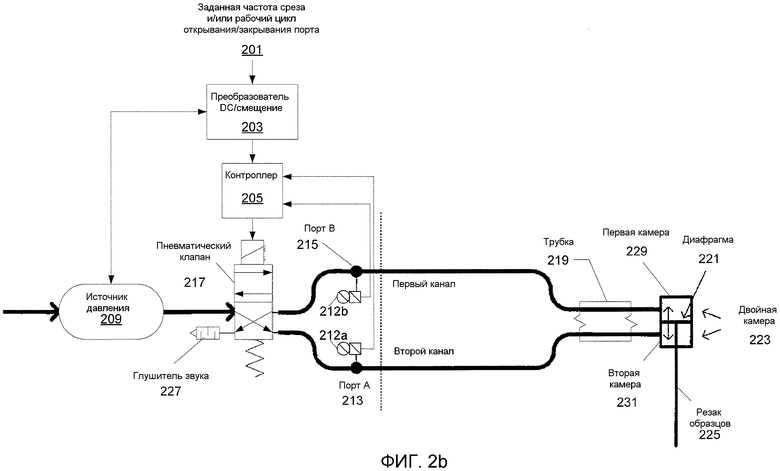
В некоторых вариантах осуществления эффекты вариаций клапана могут динамически компенсироваться путем выполнения мониторинга формы колебаний давления (например, средние перепады давления 207, детектируемые в течение времени работы клапана с помощью датчика 211 давления (фиг. 2a), или рассчитанного контроллером, используя информацию давления от датчиков 212a, b давления (фиг. 2b)) на выходе клапана 217. Информация давления может включать в себя, например, детектируемые формы колебаний давления на датчиках 212a, b давления или средних показателей давления, получаемых от датчиков 212a, b давления (другая информация давления также возможна). Датчики 211, 212a, b давления могут включать в себя преобразователь давления, выполненный с возможностью считывания давления сжатого газа и передачи электрического сигнала, содержащего информацию о давлении сжатого газа, в контроллер 205. Форма колебаний давления (которая может быть обозначать фактический VDC) может отслеживаться (например, периодически или отслеживаться непрерывно) в течение времени работы. Средние перепады давления 207 могут использоваться контроллером 205 для компенсации вибраций клапана, путем модификации VDC клапана, для уменьшения разности между фактическими перепадами давления и требуемым перепадом давления. Таким образом, в некоторых вариантах осуществления, подход с замкнутым контуром может включать в себя мониторинг среднего значения перепада давления на выходе пневматического клапана 217 (перепад давления между портом А 213 и портом B 215) и использование средней разности 207 для определения информации, специфичной для клапана, для использования при управлении VDC. В некоторых вариантах осуществления средний перепад 207 давления в течение периода цикла (1/скорость резания) может быть прямо связан с VDC и может использоваться контроллером 205, для динамического регулирования VDC сигнала управления, переданного в пневматический клапан 217. В некоторых вариантах осуществления фактический перепад давления может не рассчитываться, но вместо этого контроллер может сравнивать информацию давления от датчиков 212a, b давления, для динамического регулирования VDC. Например, сравнение форм колебаний давления (или средних давлений) из порта A и порта B может обозначать разность, которая может быть рассчитана при регулировании VDC. Другие регулировки VDC также возможны.
Первоначально, требуемый перепад давления (между портом A и портом B) может быть определен на основе ввода данных пользователем (например, принятых через интерфейс пользователя хирургической консоли), или по принятым по умолчанию данным в системе, сохраненным в запоминающем устройстве в хирургической консоли 101 перед началом работы клапана. Во время работы клапана контроллер 205 может модифицировать рабочий цикл клапана для клапана 217 на основе детектируемого/рассчитанного фактического перепада давления. Например, датчик 211 давления может детектировать перепад давлений между портом А 213 и портом B 215, и передавать сигнал, обозначающий перепад давлений, в контроллер 205. В некоторых вариантах осуществления датчик 211 давления может рассчитывать средний перепад давления 207 на основе детектируемой формы колебаний перепада давления, или датчик 211 давления может передавать детектированную форму колебаний перепада давления в контроллер 205, и контроллер 205 может определять средний перепад давления 207. В некоторых вариантах осуществления средний перепад давления 207 может быть передан в контроллер 205, как сигнал, который контроллер 205 может интерпретировать для вывода давления (или, например, использовать для вывода других значений, связанных с давлением). Хотя один датчик 211 давления показан на фиг. 2a, в некоторых вариантах осуществления (например, как можно видеть на фиг. 2b), каждый их порта А 213 и порта B 215 может иметь отдельный датчик давления (датчики 212a, b давления), который может связываться с контроллером 205. В некоторых вариантах осуществления контроллер может принимать информацию давления от датчиков 212a, b давления, рассчитывать дифференциальную форму колебаний между этими двумя портами и затем определять средний перепад давления по форме колебаний разности давлений. В другом примере, контроллер может определять смещение каждой выходной формы колебаний датчика давления, для использования при управлении рабочим циклом клапана для клапана 217 (например, контроллер может сравнивать информацию давления от датчиков 212a, b давления для определения средней разности между этими двумя давлениями порта). Такие перепады давления/средний перепад давления может использоваться для определения того, как требуется динамически регулировать VDC.
В некоторых вариантах осуществления контроллер 205 может определять интервалы времени (соответствующие модифицированному рабочему циклу клапана) для передачи сигналов в клапан 217, таким образом, чтобы он находился в первом и втором положениях для достижения требуемого среднего перепада давления между портом A и портом B. Благодаря применению отрегулированного рабочего цикла клапана таймером цикла для пневматических каналов, пневматические каналы могут быть активированы в течение всей продолжительности цикла в определенные фактические моменты времени открывания. Как отмечено выше, 50% рабочего цикла клапана может соответствовать применению сигнала (то есть подача питания в клапан с переводом в первое положение) приблизительно такое же количество времени, как и время, когда сигнал не подают (то есть питание клапана отключено с переводом его во второе положение). Регулирование на величину 1% может привести к получению рабочего цикла клапана 51%, который соответствует приложению сигнала для подключения (то есть, для перевода в первое положение) клапана на приблизительно 51% от общей продолжительности цикла (и 49% от общего времени, когда сигнал не приложен (для перевода клапана во второе положение)). Более длинный 51% рабочий цикл клапана, таким образом, может обеспечить компенсацию, например, для клапана, который перемещается в первое положение за более длительное время, чем время, требуемое для его перевода во второе положение, и/или консоли, которая имеет большее ограничение/сопротивление по току в канале, соответствующем первому положению клапана. В некоторых вариантах осуществления рабочий цикл клапана также можно регулировать с учетом различных характеристик консоли (например, для компенсации в течение разного времени перехода различных клапанов и вариаций ограничения/сопротивления потоку различных консолей).
В различных вариантах осуществления контроллер 205 может быть выполнен с возможностью приема сигналов от датчика 211 давления (или от датчиков 212a, b давления) через электронный интерфейс (например, электрические проводники, такие как провода, шины, печатные дорожки и т.п.). Контроллер 205 также может быть выполнен с возможностью передавать выходные сигналы через электронный интерфейс в пневматический клапан 217. Эти выходные сигналы могут обеспечить для контроллера 205 возможность управления работой пневматического клапана 217. Контроллер 205 может включать в себя интегральную схему, позволяющую выполнять логические функции. Таким образом, контроллер 205 может быть выполнен в форме стандартного пакета на основе интегральной микросхемы с ножками питания, входными и выходными ножками. В различных вариантах осуществления контроллер 205 может включать в себя контроллер клапана или контроллер целевого устройства. В некоторых вариантах осуществления контроллер 205 может выполнять специфичные функции управления, нацеленные на конкретное устройство, такое как клапан. В некоторых вариантах осуществления контроллер 205 может представлять собой микропроцессор. В таком случае, контроллер 205 может быть выполнен программируемым так, что он может функционировать для управления клапанами, а также другими компонентами консоли 101. В некоторых вариантах осуществления контроллер 205 не является программируемым микропроцессором, но вместо этого он представляет собой контроллер специального назначения, выполненный с возможностью управления разными клапанами, которые выполняют разные функции.
На фиг. 4 показана блок-схема последовательности операций варианта осуществления способа для динамического управления пневматическим клапаном 217. Элементы, представленные в блок-схеме последовательности операций, представляют собой только иллюстрацию. Различные представленные элементы могут быть исключены, дополнительные элементы могут быть добавлены, и/или разные элементы могут быть выполнены в другом порядке, чем представлено ниже.
В позиции 401, пользователь может выбирать требуемую частоту резания и/или PDC (например, на основе хирургических потребностей). Например, пользователь может ввести частоту резания 2500 резаний в минуту при PDC 50%.
В позиции 403, требуемый PDC может быть преобразован в требуемый средний перепад давления (или другие различия/измеряемые характеристики, относящиеся к перепаду давления между портами A и B). В некоторых вариантах осуществления требуемый PDC может быть преобразован в требуемый средний перепад давления на основе предварительно установленной справочной таблицы (например, см. фиг. 5), уравнение и т.д. В некоторых вариантах осуществления пользователь может вводить требуемый средний перепад давления в интерфейс на дисплее 103. В некоторых вариантах осуществления PDC и требуемый средний перепад давления могут быть предусмотрены, как принятое по умолчанию значение (например, 50% PDC, 0 pci (фунтов на квадратный дюйм) требуемого среднего перепада давления). Средний перепад давления может относиться к среднему перепаду давления между портом A и портом B (принятый, как среднее значение в течение времени формы колебаний перепада давления между портом A и портом B) или перепадом между средним давлением портом А и средним давлением порта B. Например, PDC и соответствующие средние значения перепадов давления могут быть определены экспериментально, методом проб и ошибок и т.д. для клапана. В некоторых вариантах осуществления могут использоваться другие характеристики для определения требуемого среднего перепада давления (например, тип прикрепленного инструмента и т.д.).
В позиции 405, пневматический клапан 217 может управляться контроллером 205 для обеспечения работы инструмента 103. В некоторых вариантах осуществления контроллер 205 может первоначально управлять клапаном 217, используя принятый по умолчанию рабочий цикл клапана (например, 50%). В некоторых вариантах осуществления контроллер 205 может принимать требуемый средний перепад давления из отдельного передатчика 203 (например, электронной схемы, выполненной с возможностью преобразования принятого электронного сигнала, обозначающего требуемое значение PDC 201, в соответствующий заданный средний перепад давления на основе внутренней справочной таблицы (например, см. фиг. 5)). В некоторых вариантах осуществления контроллер 205 может принимать другие желательные рабочие характеристики, в дополнение к или вместо требуемого среднего перепада давлений (например, контроллер может принимать желательную разность между средними формами колебаний давления из порта A и порта B или может принимать желательное смещение давления порта А и порта B от желательного среднего давления для двух портов).
В позиции 407 средние перепады давления 207 могут быть переданы из датчика 211 давления в контроллер 205 (или могут быть рассчитаны контроллером 205, используя информацию давления из датчиков 212a, b давления). Например, средние перепады давления 207 могут быть переданы датчиком 211 давления каждые 100 миллисекунд (или информация давления (например, смещение давления) может быть передана датчиками 212a, b давления, и средний перепад давления 207 может быть рассчитан с помощью контроллера 205). Другие интервалы времени также могут быть рассмотрены (например, через каждые 5 секунд). В некоторых вариантах осуществления датчик 211 давления может рассчитывать средний перепад давления на основе детектируемой формы колебаний перепада давления, или датчик 211 давления может передавать детектируемую форму колебаний перепада давления (который может включать в себя один или больше перепадов давления между портом A и портом B) в контроллер 205, и контроллер 205 может определять средний перепад давления 207. В некоторых вариантах осуществления датчики 212a, b давления, соединенные с портами A и B, могут передавать детектированную информацию давлении (например, смещение давления, форму колебаний давления и т.д.) в контроллер 205, и контроллер 205 может определять средний перепад давления для портов (или может сравнивать формы колебаний давления без фактического расчета среднего перепада давления).
В позиции 409, контроллер 205 может сравнивать измеряемый средний перепад давления 207 (например, принятый от датчиков давления или рассчитанной с использованием информации от датчиков давления) с требуемым средним перепадом давления (например, рассчитанным/определенным по информации, принятой от пользователя или по принятым по умолчанию установкам), и определять модифицированный VDC. Контроллер 205 может определять модифицированный VDC для уменьшения разности между требуемым средним перепадом давления и измеряемым средним перепадом давления. Например, если давление в порту A принять, как положительное давление, и давление в порту B принять, как отрицательное давление, тогда измеренный средний перепад давления может составлять 0 pci. В данном примере, если измеренный средний перепад давления, вместо этого, является положительным (например, +2 pci), измеренный средний перепад давления может обозначать, что порт A фактически остается открытым больше, чем порт B в течение заданного цикла (в результате чего порт A заряжается до большего давление, когда он открыт, чем порт B заряжается, когда он открыт). Если требуемый средний перепад давления был установлен 0 pci, VDC (который может обозначать процент от времени, в течение которого контроллер 205 передает сигналы в порт А для его открывания) может быть увеличен с помощью контроллера 205 (например, с 50% до 51%). В некоторых вариантах осуществления контроллер 205 может увеличивать или уменьшать VDC, в соответствии с принятым по умолчанию значением или предоставленным пользователем соотношением. В некоторых вариантах осуществления величина для регулирования VDC в соответствии с разностью между требуемым средним перепадом давления и измеряемым перепадом давления может быть экспериментально определена для клапана 217. Например, может быть экспериментально определено, что необходимо увеличить VDC на 1% для каждого перепада +1,2 pci между измеренным средним перепадом давления и требуемым средним перепадом давления (другие отношения также могут быть рассмотрены). Такая информация может быть сохранена в форме уравнения или таблицы, доступных для контроллера 205. В качестве другого примера, контроллер 205 может увеличивать VDC, используя предоставляемое пользователем приращение (например, 0,5%), если средний перепад давления является положительным, и уменьшение VDC на представленную пользователем величину последовательного уменьшения, если средний перепад давления является отрицательным. В некоторых вариантах осуществления контроллер 205 не может регулировать VDC, если измеренный средний перепад давления находится в пределах принятого по умолчанию значения или предоставленного пользователем диапазона (например, регулирование среднего перепада давления не выполняют, если он находится в пределах 1 pci от требуемого среднего перепада давления). В некоторых вариантах осуществления пользователь может вводить различные команды для использования контроллером (например, выполняя ввод через сенсорный экран дисплея 109). Например, пользователь может ввести отношение -1% VDC для каждого перепада давления +1,2 pci между измеряемым средним перепадом давления и желательным средним перепадом давления. В некоторых вариантах осуществления контроллер может фактически не рассчитывать перепады давления, но вместо этого может сравнивать формы колебаний давления из порта A и B (например, как определено датчиками 212a, b давления) друг с другом или до желательных форм колебаний, для определения, как требуется отрегулировать VDC. Например, если форма колебаний давления для порта A, в среднем, на 2 pci больше, чем желательная форма колебаний давления (например, как сохранено в системе), VDC может быть отрегулирован, без необходимости фактического расчета перепада давления. Другие технологии регулирования VDC также могут быть предусмотрены.
В позиции 411, контроллер 205 может использовать модифицированный VDC при включении пневматического клапана 217 (например, до времени переключения между первым/вторым положениями).
В позиции 413, контроллер 205 может выполнять итерации между сравнением измеряемого среднего перепада давления 207 с желательным средним перепадом давления (или используя взаимосвязанные переменные /измеряемые характеристики перепада давления), и определяя новый модифицированный VDC для сведения к минимуму разности между измеряемым средним перепадом давления 207 и желательным средним перепадом давления. Например, контроллер 205 может воплощать алгоритм контроллера PID (пропорциональное-интегральное-дифференциальное регулирование) для регулирования рабочего цикла клапана вверх или вниз, приема нового детектированного среднего перепада давления (или приема новой информации о давлении для использования при расчетах среднего перепада давления), регулирования рабочего цикла клапана, соответственно, вверх или вниз, на основе направления нового среднего перепада давления по сравнению с предыдущим средним перепадом давления, приема/расчета нового среднего перепада давления, в ответ на модифицированный рабочий цикл клапана, и т.д. до тех пор, пока разность между средним перепадом давления и желательным перепадом давления не будет уменьшена (например, в пределах предоставленного пользователем диапазона).
В некоторых вариантах осуществления система пневматического управления может включать в себя один или больше процессоров. Процессор может включать в себя одно устройство обработки или множество устройств обработки. Такое устройство обработки может представлять собой микропроцессор, контроллер (например, контроллер 205) (который может представлять собой микроконтроллер), цифровой сигнальный процессор, микрокомпьютер, центральный процессорный модуль, программируемую пользователем вентильную матрицу, программируемое логическое устройство, конечный автомат, логическую схему, схему управления, аналоговую схему, цифровую схему и/или любое устройство, которое манипулирует сигналами (аналоговыми и/или цифровыми) на основе функциональных инструкций. Запоминающее устройство, соединенное с и/или внедренное в процессоры, может представлять собой одиночное запоминающее устройство или множество запоминающих устройств. Такое запоминающее устройство может представлять собой запоминающее устройство, предназначенное только для чтения, оперативное запоминающее устройство, энергозависимое запоминающее устройство, энергонезависимое запоминающее устройство, статическое запоминающее устройство, динамическое запоминающее устройство, запоминающее устройство типа флэш, запоминающее устройство кэш и/или любое устройство, которое содержит цифровую информацию. Следует отметить, что, когда одна или больше функций в процессоре воплощена через конечный автомат, аналоговую схему, цифровую схему и/или логическую схему, запоминающее устройство, в котором содержатся соответствующие операционные инструкции, может быть внедрено в него или может быть внешним для схемы, содержащей конечный автомат, аналоговой схемы, цифровой схемы и/или логической схемы. Запоминающее устройство может содержать, и процессор может исполнять операционные инструкции, соответствующие, по меньшей мере, некоторым из элементов, представленным и описанным в ассоциации с чертежами.
Как показано на фиг. 6, в то время как несколько вариантов осуществления были описаны здесь в отношении четырехходового пневматического клапана, следует понимать, что эти варианты осуществления также применимы для двух или более клапанов, управляемых скоординированным образом для подачи газа под давлением в инструмент 103. Например, “первый порт” и “второй порт”, описанные в отношении четырехходового пневматического клапана, могут, вместо этого, быть соединены с двумя или больше отдельными клапанами (то есть, “первый порт”, соединенный с первым клапаном, и “второй порт”, соединенный со вторым клапаном). Первым клапаном и вторым клапаном можно управлять вместе для поочередной подачи газа под давлением в первый порт и во второй порт. В некоторых вариантах осуществления датчик давления может быть соединен, как с первым портом, так и со вторым портом для определения перепада давления (или каждый порт может быть соединен с отдельным датчиком давления, и отдельные значения давления можно использовать при определении среднего давления). Рабочий цикл клапана можно затем использовать в отношении двух или больше клапанов, для регулирования времени открытого и закрытого канала их соответствующих портов (управляя отдельными клапанами, в соответствии со временем открытого/закрытого состояния, обозначенного рабочим циклом клапана).
Различные модификации могут быть выполнены для представленных вариантов осуществления специалистом в данной области техники. Другие варианты осуществления настоящего изобретения будут понятны для специалиста в данной области техники при рассмотрении настоящего описания и из практики раскрытого здесь настоящего изобретения. Предполагается, что настоящее описание и примеры следует рассматривать только, как примеры, при этом истинный объем и сущность изобретения представлены в следующей формуле изобретения и ее эквивалентах.
| название | год | авторы | номер документа |
|---|---|---|---|
| ДВУХПОРТОВЫЙ ПНЕВМАТИЧЕСКИЙ СОЕДИНИТЕЛЬ | 2020 |
|
RU2824611C1 |
| ЗОНД ВИТРЭКТОМИИ С РЕГУЛИРУЕМЫМ РАЗМЕРОМ ПОРТА РЕЖУЩЕГО ИНСТРУМЕНТА | 2011 |
|
RU2591627C2 |
| АППАРАТ ИСКУССТВЕННОЙ ВЕНТИЛЯЦИИ ЛЕГКИХ С ИНТЕГРИРОВАННОЙ ВОЗДУХОДУВКОЙ | 2011 |
|
RU2585137C2 |
| ЗОНД ДЛЯ ВИТРЭКТОМИИ | 2018 |
|
RU2759047C2 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ И ЗАЩИТЫ ТЕЛЕСКОПИЧЕСКОГО ГИДРАВЛИЧЕСКОГО ЦИЛИНДРА ПОДЪЕМНОГО КРАНА | 2014 |
|
RU2664030C1 |
| СПОСОБ (ВАРИАНТЫ) ДВОЙНОГО ВПРЫСКА ТОПЛИВА | 2016 |
|
RU2713978C2 |
| УНИВЕРСАЛЬНЫЙ КОНТРОЛЛЕР ДЛЯ УСТРОЙСТВА АВАРИЙНОГО ЗАКРЫТИЯ | 2006 |
|
RU2413115C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ДВОЙНОГО ВПРЫСКА ТОПЛИВА | 2016 |
|
RU2717863C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ С АКСЕЛЕРОМЕТРОМ ДЛЯ ОБРАТНОЙ СВЯЗИ ПО ПОЛОЖЕНИЮ | 2015 |
|
RU2694803C2 |
| СПОСОБ (ВАРИАНТЫ) И СИСТЕМА ДЛЯ ВПРЫСКА ТОПЛИВА ПРИ ПОСТОЯННОМ И ПЕРЕМЕННОМ ДАВЛЕНИИ | 2015 |
|
RU2706872C2 |
Группа изобретений относится к хирургии. Хирургическая консоль содержит пневматический клапан; первый порт и второй порты, соединенные с клапаном, выполненным с возможностью предоставлять сжатый газ поочередно в каждый из первого порта и второго порта; датчик давления, соединенный с портами; и контроллер, соединенный с клапаном и датчиком давления. Контроллер выполнен с возможностью управления временем открытого и закрытого состояния канала клапана, в соответствии с рабочим циклом клапана. Время открытого состояния клапана соответствует времени для открывания первого порта, а время закрытого состояния клапана соответствует времени для закрывания первого порта. Контроллер также выполнен с возможностью принимать измеряемый перепад давления между портами или рассчитывать перепад давления между портами по информации от датчика давления, и модифицировать рабочий цикл клапана на основе разности между измеренным или рассчитанным перепадом давления и желательным средним перепадом давления для уменьшения разности между этими значениями. Раскрыт способ регулирования клапана. Технический результат - обеспечение необходимого для правильной работы присоединяемых инструментов давления. 2 н. и 17 з.п. ф-лы, 6 ил.
1. Хирургическая консоль, содержащая:
пневматический клапан;
по меньшей мере, первый порт и второй порт, соединенные с клапаном, причем клапан выполнен с возможностью предоставлять сжатый газ поочередно в каждый из первого порта и второго порта;
по меньшей мере, один датчик давления, соединенный, по меньшей мере, с одним первым портом и вторым портом; и
контроллер, соединенный с клапаном и датчиком давления, причем контроллер выполнен с возможностью управления временем открытого и закрытого состояния канала клапана, в соответствии с рабочим циклом клапана, при этом время открытого состояния клапана соответствует времени для открывания первого порта, а время закрытого состояния клапана соответствует времени для закрывания первого порта;
при этом контроллер выполнен с возможностью принимать измеряемый перепад давления между первым портом и вторым портом или рассчитывать перепад давления между первым портом и вторым портом по информации от по меньшей мере одного датчика давления, и модифицировать рабочий цикл клапана на основе разности между измеренным или рассчитанным перепадом давления между первым портом и вторым портом и желательным средним перепадом давления между первым портом и вторым портом для уменьшения разности между этими значениями.
2. Хирургическая консоль по п. 1, в которой пневматический клапан содержит два или более клапанов, которые управляются вместе для подачи сжатого газа поочередно в первый порт и во второй порт, причем управление временем открытого и закрытого состояния канала клапана в соответствии с рабочим циклом клапана содержит управление временем открытого и закрытого состояния для двух или более клапанов в соответствии с рабочим циклом клапана.
3. Хирургическая консоль по п. 1, в которой первый порт выполнен с возможностью закрывания, которое совпадает с открыванием второго порта, при этом воздух под давлением направляется с помощью клапана или через первый порт, или через второй порт.
4. Хирургическая консоль по п. 1, в которой указанный, по меньшей мере, один датчик давления содержит датчик перепада давления, соединенный с первым портом и вторым портом для определения перепада давления между первым портом и вторым портом.
5. Хирургическая консоль по п. 1, в которой контроллер выполнен с возможностью определять измеренный средний перепад давления между первым портом и вторым портом и использовать измеренный средний перепад давления для модификации рабочего цикла клапана, по меньшей мере, дважды в течение непрерывного интервала работы клапана.
6. Хирургическая консоль по п. 5, содержащая интерфейс пользователя хирургической консоли, выполненный с возможностью приема от пользователя желательного рабочего цикла порта, при этом рабочий цикл порта выполнен с возможностью перевода в средний перепад давления через схему преобразователя смещения.
7. Хирургическая консоль по п. 1, в которой указанный, по меньшей мере, один датчик давления содержит первый датчик давления, соединенный с первым портом, и второй датчик давления, соединенный со вторым портом, и при этом контроллер выполнен с возможностью сравнения информации давления от первого датчика давления и второго датчика давления для модификации рабочего цикла клапана.
8. Хирургическая консоль по п. 1, в которой измеренный перепад давления содержит измеренный средний перепад давления.
9. Хирургическая консоль по п. 8, в которой клапан выполнен с возможностью привода пневматического инструмента, причем хирургическая консоль дополнительно содержит пневматический инструмент, соединенный с хирургической консолью, где пневматический инструмент представляет собой резак для витрэктомии.
10. Хирургическая консоль по п. 1, в которой общее время клапана равно приблизительно времени открытого состояния клапана плюс время закрытого состояния клапана для цикла клапана, где рабочий цикл клапана представляет собой процент от общего времени клапана для контроллера для передачи сигнала в клапан на подачу газа через первый порт.
11. Хирургическая консоль по п. 1, в которой контроллер выполнен с возможностью регулировать давление, приложенное к клапану, для балансирования между низкими давлениями для уменьшения потребления воздуха и высокими давлениями для более быстрой скорости резки и увеличения динамического диапазона доступных скоростей резки.
12. Способ регулирования клапана хирургической пневматической системы, содержащий следующие стадии:
приводят в действие пневматическую систему, содержащую пневматический клапан, выполненный с возможностью циклического переключения между первым положением и вторым положением, где газ под давлением направляют в первый порт, когда клапан находится в первом положении, и где газ под давлением направляют во второй порт, когда клапан находится во втором положении;
принимают информацию о давлении, по меньшей мере, от одного датчика давления, соединенного, по меньшей мере, с одним первым портом и вторым портом;
используют принятую информацию давления для определения перепада давления между первым портом и вторым портом;
определяют модифицированный рабочий цикл клапана на основе разности между измеренным перепадом давления и желательным средним перепадом давления для уменьшения разности между заданным перепадом давления и желательным средним перепадом давления; и
регулируют время открытого/закрытого состояния клапана, которое соответствует времени для закрывания первого порта и открывания второго порта, в соответствии с модифицированным рабочим циклом клапана.
13. Способ по п. 12, в котором пневматический клапан содержит два или более клапанов, которыми управляют совместно для подачи газа под давлением поочередно к первому порту и ко второму порту, где первое положение содержит открывание первого клапана из двух или более клапанов, а второе положение содержит открывание второго клапана из двух или более клапанов.
14. Способ по п. 12, в котором указанный, по меньшей мере, один датчик давления содержит датчик перепада давления, соединенный с первым портом и вторым портом для определения перепада давления между первым портом и вторым портом.
15. Способ по п. 12, дополнительно содержащий определение перепада давлений между первым портом и вторым портом, и использование этого перепада давлений для модификации рабочего цикла клапана, по меньшей мере, дважды в течение непрерывного интервала работы клапана.
16. Способ по п. 12, дополнительно содержащий следующие стадии:
принимают желательный средний перепад давления от пользователя;
принимают желательный рабочий цикл порта от пользователя через интерфейс пользователя хирургической консоли; и
переводят рабочий цикл порта в средний перепад давления через преобразователь смещения.
17. Способ по п. 12, в котором прием информации давления от, по меньшей мере, одного датчика давления содержит прием информации давления от первого датчика давления, соединенного с первым портом, и прием информации давления от второго датчика давления, соединенного со вторым портом.
18. Способ по п. 12, в котором общее время клапана равно приблизительно времени открытого клапана плюс время закрытого клапана для цикла клапана, где рабочий цикл клапана представляет собой процент от общего времени клапана для передачи сигнала из контроллера в клапан для направления газа через первый порт.
19. Способ по п. 12, в котором определенный перепад давления представляет собой определенный средний перепад давления, где определение перепада давления содержит определение среднего перепада давления между первым портом и вторым портом в течение периода времени.
| US 2008149197 A1, 26.06.2008 | |||
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| JP 2007307386 A, 29.11.2007 | |||
| Микроскоп | 1940 |
|
SU58919A1 |

