ОБЛАСТЬ ТЕХНИКИ
[0001] Настоящее изобретение в целом относится к устройствам управления технологическим процессом, таким как клапаны, и, в частности, к способам, системам и устройствам для обеспечения обратной связи по положению устройств управления технологическим процессом в системе управления технологическим процессом.
Уровень техники
[0002] Электронные устройства-контроллеры (например, электропневматический контроллер, программируемые контроллеры, схемы аналогового управления и т. д.), как правило, применяют для управления устройствами управления технологическим процессом (например, управляющими клапанами, насосами, шиберами и т. д.). Эти электронные устройства-контроллеры обеспечивают предусмотренное функционирование устройств управления технологическим процессом. В целях безопасности, экономической эффективности и надежности многие широко известные пневматические исполнительные механизмы диафрагменного или поршневого типа применяют для приведения в действие устройств управления технологическим процессом и, как правило, соединяют со всей системой управления технологическим процессом через электропневматический контроллер. Электропневматические контроллеры обычно выполнены с возможностью приема одного или большего количества управляющих сигналов и преобразования этих управляющих сигналов в давление, подаваемое на пневматический исполнительный механизм для осуществления требуемой операции устройством управления технологическим процессом, соединенным с пневматическим исполнительным механизмом. Например, если процедура управления технологическим процессом предполагает подачу клапаном с пневматическим приводом большего объема технологической текучей среды, величина управляющего сигнала, подаваемого на электропневматический контроллер, связанный с клапаном, может быть увеличена (например, от 10 миллиампер (мА) до 15 мА в случае, если электропневматический контроллер выполнен с возможностью приема управляющего сигнала 4-20 мА).
[0003] В электропневматических контроллерах, как правило, применяют сигнал обратной связи, генерируемый сенсорной системой или элементом обратной связи (например, датчиком положения), который распознает или обнаруживает рабочий отклик устройства управления с пневматическим приводом. В одном из примеров, в случае клапана с пневматическим приводом, сигнал обратной связи может представлять собой сигнал тока обратной связи, соответствующий положению клапана, которое измерено или определено с помощью датчика положения. Как правило, сигнал тока обратной связи, соответствующий положению клапана, передают на контроллер по проводному или беспроводному соединению, а положение клапана контроллер вычисляет, например, на основании перепада напряжения на резисторе на двух входах контроллера.
[0004] В некоторых системах клапан с пневматическим приводом соединен проводным способом как с электрическим изолятором, так и с электропневматическим контроллером. Электрический изолятор также соединен проводным способом с электропневматическим контроллером. Таким образом, клапан имеет первое соединение непосредственно с контроллером и второе соединение с контроллером через электрический изолятор. Электрический изолятор подает питание как на клапан, так и на контроллер от трехконтактного источника питания переменного тока и обусловливает передачу сигналов тока обратной связи от клапана на контроллер через сопротивление. Поскольку как клапан, так и контроллер запитаны от одного источника питания, применение электрического изолятора позволяет минимизировать возможность замыкания через цепь заземления.
[0005] Контроллер определяет перепад напряжения между двумя электрическими входными соединениями от клапана, т. е. между первым проводным соединением, в котором сигнал тока обратной связи принимают непосредственно от клапана, и вторым проводным соединением, в котором сигнал тока обратной связи принимают от клапана через сопротивление, которое относится к электрическому изолятору. Затем контроллер на основании значения перепада напряжения вычисляет положение исполнительного механизма клапана, сравнивает вычисленное положение с требуемым заданным значением или управляющим сигналом и применяет способ управления положением для генерирования значения управления на исполнительный механизм на основании вычисленного положения и управляющего сигнала (например, разности между ними). Это значение управления на исполнительный механизм соответствует давлению, подаваемому на пневматический исполнительный механизм для выполнения требуемого действия устройством управления (например, достижения требуемого положения клапана), соединенного с пневматическим исполнительным механизмом.
[0006] В некоторых системах беспроводной датчик, или преобразователь, положения преобразует движение или положение исполнительного механизма клапана в радиосигнал, который включает значение, указывающее положение исполнительного механизма. Этот преобразователь может содержать, например, потенциометр, магнитный датчик или массив датчиков, пьезоэлектрический преобразователь, датчик Холла, струнный потенциометр и т. д., причем преобразователь производит передачу радиосигнала по беспроводному каналу связи на контроллер клапана, например, с применением протокола WirelessHART®, протокола Wi-Fi® или другого беспроводного протокола. Затем контроллер клапана может осуществлять управление клапаном на основании значения, включенного в радиосигнал.
Раскрытие сущности изобретения
[0007] В соответствии с первым иллюстративным аспектом устройство для обеспечения обратной связи по положению устройства управления технологическим процессом, используемого при управлении технологическим процессом, осуществляемым в системе управления технологическим процессом (например, клапана, насоса, шибера и т. д.), может содержать акселерометр, соединенный с устройством управления технологическим процессом. Для простоты описания устройство для обеспечения обратной связи по положению устройства управления в данном документе взаимозаменяемо упоминают как «устройство обратной связи по положению», «датчик положения», «преобразователь положения», «датчик», «преобразователь» или «датчик/преобразователь положения». Кроме того, датчик/преобразователь положения может содержать процессор для преобразования сигнала, генерируемого акселерометром, в сигнал, который включает значение, указывающее положение исполнительного механизма, соединенного с устройством управления. Кроме того, датчик/преобразователь положения может содержать интерфейс связи для передачи беспроводного сигнала, указывающего положение исполнительного механизма, и соединение с источником питания для подачи питания на процессор и интерфейс связи.
[0008] В соответствии со вторым иллюстративным аспектом способ, осуществляемый с помощью датчика/преобразователя положения, может включать прием сигнала, генерируемого акселерометром, соединенным с исполнительным механизмом устройства управления, используемого при управлении технологическим процессом, осуществляемым в системе управления технологическим процессом. Устройство управления может представлять собой, например, клапан, насос, шибер и т. д. Способ может дополнительно включать преобразование значения сигнала, генерируемого акселерометром, в значение, указывающее положение исполнительного механизма, и осуществление беспроводной передачи сигнала от датчика/преобразователя положения для использования контроллером, который управляет устройством управления на основании положения исполнительного механизма.
[0009] В соответствии с третьим иллюстративным аспектом устройство обратной связи для обеспечения обратной связи по положению в системе управления технологическим процессом может включать первый интерфейс связи для приема беспроводного сигнала, указывающего положение исполнительного механизма, соединенный с устройством управления, используемым при управлении технологическим процессом, осуществляемым в системе управления технологическим процессом. Беспроводной сигнал может быть сгенерирован с помощью акселерометра, входящего в состав датчика/преобразователя положения, который сопряжен с устройством обратной связи и который прикреплен к устройству управления. Устройство обратной связи может дополнительно включать генератор сигнала для генерации и передачи сигнала обратной связи по положению, который основан на принимаемом беспроводном сигнале. Сигнал обратной связи по положению может быть передан через первый интерфейс связи устройства обратной связи или через второй интерфейс связи устройства обратной связи на по меньшей мере одно из контроллера устройства управления или хоста системы управления системы управления технологическим процессом. Устройство обратной связи может быть сопряжено с множеством датчиков/преобразователей положения, причем устройство обратной связи может передавать сигналы обратной связи на множество контроллеров или других устройств системы управления технологическим процессом.
[00010] В соответствии с любым одним или большим количеством из вышеуказанных первого, второго, или третьего аспектов устройство для обеспечения обратной связи по положению устройства управления технологическим процессом (например, устройство обратной связи по положению, датчик положения, преобразователь положения, датчик, преобразователь или датчик/преобразователь положения) и/или способ может дополнительно включать одну или большее количество из следующих предпочтительных форм.
[00011] В одной предпочтительной форме беспроводный сигнал и/или сигнал обратной связи по положению передают на контроллер устройства управления и/или хост системы управления системы управления технологическим процессом.
[00012] В другой предпочтительной форме интерфейс связи датчика/преобразователя положения соединен с каналом беспроводной связи, образующим выделенное соединение между датчиком/преобразователем положения и устройством обратной связи, сопряженным с датчиком/преобразователем положения, а устройство обратной связи соединено с возможностью осуществления связи с контроллером устройства управления.
[00013] В другой предпочтительной форме источник питания датчика/преобразователя положения является перезаряжаемым.
[00014] В еще одной предпочтительной форме датчик/преобразователь положения включает устройство для получения энергии, которое позволяет получать энергию, генерируемую одной или большим количеством частей датчика/преобразователя положения, используемую для подзарядки источника питания.
[00015] В еще одной предпочтительной форме процессор датчика/преобразователя положения преобразует сигнал, генерируемый акселерометром, с использованием значения, указывающего калиброванное положение устройства управления.
[00016] В другой предпочтительной форме беспроводной сигнал, передаваемый датчиком/преобразователем положения, соответствует протоколу WirelessHART® или протоколу ZigBee®.
[00017] В другой предпочтительной форме устройство управления представляет собой клапан.
[00018] Один из предпочтительных способов включает подачу питания на датчик/преобразователь положения с использованием устройства аккумулирования энергии, входящего в состав или расположенного вблизи датчика/преобразователя положения.
[00019] Другой предпочтительный способ включает подзарядку устройства аккумулирования энергии с использованием солнечной энергии, временного подключения устройства аккумулирования энергии к источнику энергии, рекуперированной энергии локальной вибрации или движения и/или индукции бесконтактного зарядного устройства.
[00020] В другом предпочтительном способе осуществление беспроводной передачи сигнала от датчика/преобразователя положения может включать осуществление беспроводной передачи сигнала по каналу беспроводной связи между датчиком/преобразователем положения и сопряженным устройством, причем это сопряженное устройство соединено с возможностью осуществления связи с контроллером.
[00021] В другом предпочтительном способе осуществление беспроводной передачи сигнала от датчика/преобразователя положения включает осуществление беспроводной передачи сигнала с использованием протокола беспроводной связи HART или беспроводного протокола ближнего действия.
[00022] Еще один предпочтительный способ включает калибровку датчика/преобразователя положения в начальном положении исполнительного механизма или устройства управления, а преобразование значения сигнала, генерируемого акселерометром, включает преобразование значения сигнала, генерируемого акселерометром, на основании начального положения исполнительного механизма или устройства управления.
[00023] В другой предпочтительной форме беспроводной сигнал, принимаемый устройством обратной связи, представляет собой первый беспроводной сигнал, а сигнал обратной связи по положению, генерируемый устройством обратной связи, представляет собой второй беспроводной сигнал.
[00024] В другой предпочтительной форме устройство обратной связи сопряжено с множеством устройств, а датчик/преобразователь положения входит в состав устройств из этого множества устройств.
[00025] В еще одной предпочтительной форме беспроводной сигнал, передаваемый датчиком/преобразователем положения, представляет собой первый беспроводной сигнал, а датчик/преобразователь положения представляет собой первый датчик, входящий в состав устройств из множества устройств. Кроме того, исполнительный механизм представляет собой первый исполнительный механизм, устройство управления представляет собой первое устройство управления, а сигнал обратной связи по положению представляет собой первый сигнал обратной связи по положению. Устройство обратной связи сопряжено со вторым датчиком, входящим в состав множества устройств для приема второго беспроводного сигнала, причем второй датчик соответствует второму устройству управления. Второй датчик генерирует второй беспроводной сигнал, который указывает положение второго исполнительного механизма, соединенного со вторым устройством управления. Кроме того, генератор сигналов генерирует и передает второй сигнал обратной связи по положению на контроллер второго устройства управления или на хост системы управления. Второй сигнал обратной связи по положению может быть основан на принимаемом втором беспроводном сигнале.
[00026] В другой предпочтительной форме акселерометр генерирует выходной сигнал, а значение беспроводного сигнала, принимаемого устройством обратной связи, основано на выходном сигнале, генерируемом акселерометром.
[00027] В другой предпочтительной форме беспроводной сигнал, принимаемый устройством обратной связи, соответствует первому беспроводному протоколу ближнего действия, а сигнал обратной связи по положению, генерируемый устройством обратной связи, соответствует первому беспроводному протоколу ближнего действия, второму беспроводному протоколу ближнего действия или беспроводному протоколу HART.
Краткое описание чертежей
[00028] На ФИГ. 1 представлена блок-схема приведенной в качестве примера системы управления технологическим процессом, которая включает приведенный в качестве примера беспроводной датчик или преобразователь положения с акселерометром, который может осуществлять беспроводную связь с контроллером устройства управления технологическим процессом системы управления технологическим процессом;
[00029] На ФИГ. 2 представлена подробная блок-схема приведенного в качестве примера беспроводного датчика или преобразователя положения с акселерометром и контроллера по ФИГ. 1;
[00030] На ФИГ. 3 представлена блок-схема приведенной в качестве примера схемы соединений беспроводного датчика или преобразователя положения с акселерометром, устройства, которое работает совместно или в паре с датчиком, и контроллера;
[00031] На ФИГ. 4 представлена блок-схема приведенного в качестве примера устройства, которое работает совместно или в паре с датчиком, которое может быть соединено с возможностью осуществления связи с беспроводным датчиком или преобразователем положения с акселерометром по ФИГ. 1;
[00032] На ФИГ. 5 представлена блок-схема, которая иллюстрирует приведенную в качестве примера систему управления технологическим процессом, использующую сеть беспроводной связи для обеспечения беспроводной связи между устройствами управления технологическим процессом, контроллерами, маршрутизаторами и другими сетевыми устройствами; а
[00033] На ФИГ. 6 представлен приведенный в качестве примера способ обеспечения передачи радиосигнала обратной связи по положению на контроллер.
Осуществление изобретения
[00034] Хотя ниже описаны приведенные в качестве примера способы и устройства, которые содержат, помимо других компонентов, программное обеспечение и/или аппаратно реализованное программное обеспечение, выполняемое на аппаратном обеспечении, следует отметить, что такие системы являются лишь иллюстрацией и их не следует рассматривать в качестве ограничения. Например, предполагается, что любой или все из этих компонентов, которые включают аппаратное обеспечение, программное обеспечение и аппаратно реализованное программное обеспечение, могут быть реализованы исключительно в аппаратном обеспечении, исключительно в программном обеспечении или в любой комбинации аппаратного обеспечения и программного обеспечения. Соответственно, хотя ниже описаны приведенные в качестве примера способы и устройства, приведенные примеры не являются единственным способом реализации таких способов и устройств.
[00035] Как правило, в системе управления технологическим процессом контроллер (например, электропневматический контроллер) непосредственно соединен с устройством управления технологическим процессом (например, клапаном или управляющим клапаном, насосом, шибером и т. д., которые в данном документе также взаимозаменяемо упоминают как «устройство управления»). Датчик положения, соединенный с устройством управления, измеряет перемещение исполнительного механизма, соединенного с устройством управления, и обеспечивает по проводному соединению сигнал обратной связи, указывающий положение устройства управления, на контроллер устройства управления. Например, датчик положения обеспечивает с резистивного выхода сигнал, который указывает перемещение или положение исполнительного механизма, на контроллер устройства управления. Контроллер вычисляет положение исполнительного устройства на основании перепада напряжения на резистивном выходе, сравнивает положение с требуемым сигналом или заданным значением управления и обеспечивает сигнал для управления устройством управления на основании этого сравнения.
[00036] Кроме того, или в качестве альтернативы в некоторых системах управления технологическим процессом известный датчик или преобразователь положения устройства управления беспроводным способом соединен с контроллером. Беспроводное соединение контроллера с датчиком или преобразователем положения позволяет контроллеру беспроводным способом принимать от преобразователя положения сигнал обратной связи, который указывает положение устройства управления.
[00037] Во многих случаях такие известные датчики или преобразователи положения содержат магнит или магнитный массив, который присоединен к устройству управления. Например, известная система магнитных датчиков содержит магнитный массив, прикрепляемый к штоку или исполнительному механизму клапана, и содержит отдельный датчик Холла или другой датчик напряженности магнитного поля, который способен обнаруживать и/или измерять напряженность магнитного поля, создаваемую магнитным массивом. Датчик напряженности магнитного поля не прикреплен и физически не соединен с клапаном, а расположен на соответствующем небольшом расстоянии от магнитного массива. Следовательно, когда шток или исполнительный механизм клапана перемещается, датчик напряженности магнитного поля обнаруживает напряженность магнитного поля, создаваемую прикрепленным магнитом или магнитным массивом, и датчик напряженности магнитного поля преобразует величину обнаруженной напряженности в показания текущего положения или перемещения устройства управления. Таким образом, положение или перемещение устройства управления вторично определяют с помощью устройства, которое физически не соединено с устройством управления.
[00038] Однако такой подход имеет несколько недостатков. В частности, магнит или магнитный массив, т. е. первичный источник для определения положения или перемещения, чувствителен к изменениям температуры. Соответственно, если температура окружающей среды изменяется или колеблется, точность может быть снижена, что, в частности, свойственно для сред управления технологическим процессом, расположенных вне помещений, и/или для эндотермических или экзотермических процессов. Таким образом, в системах магнитных датчиков необходимо компенсировать изменение температуры для поддержания точности в пределах допустимых отклонений. Например, магнитный датчик или датчик на основе магнитного массива, как правило, при производстве подвергают испытанию с дополнительным циклом изменения температуры для компенсации возможных изменений температуры.
[00039] Кроме того, возможности физического размещения системы магнитных датчиков ограничены, поскольку датчик напряженности магнитного поля должен быть расположен в пределах узкого диапазона ориентаций и расстояний по отношению к прикрепленному магниту или магнитному массиву. Таким образом, в некоторых системах управления технологическим процессом оптимальное позиционирование между магнитом/магнитным массивом и датчиком напряженности магнитного поля может быть усложнено (а иногда даже не представляется возможным), что зависит от конкретного оборудования и топологии трубопроводов системы управления технологическим процессом.
[00040] Кроме того, для систем магнитных датчиков в целях считывания положения необходимо выполнять множество этапов калибровки, как первоначально, так и с течением времени. Например, первая начальная калибровка считывания положения должна быть выполнена на основе диапазона перемещения устройства управления, а вторая начальная калибровка считывания положения должна быть выполнена на основе расстояния и ориентации датчика напряженности магнитного поля. Кроме того, может потребоваться повторная калибровка, например, при изменении ориентации и расположения датчика напряженности магнитного поля относительно магнита/магнитного массива во время функционирования технологической установки (например, из-за вибрации, температуры и т. д.) и/или при замене датчика напряженности магнитного поля.
[00041] Кроме того, поскольку устройства управления различаются по размеру и имеют различные диапазоны перемещения, необходимо изготавливать системы магнитных датчиков разного размера для работы в устройствах управления разных размеров, в результате чего увеличиваются затраты на производство, оборудование и монтаж.
[00042] Варианты осуществления систем, устройств и способов, описанные в данном документе, включают способы, с помощью которых некоторые или все эти недостатки могут быть минимизированы. В частности, системы, устройства и способы, описанные в данном документе, относятся к датчику положения, который прикрепляют к устройству управления технологическим процессом и который содержит акселерометр. Такой датчик положения, как правило, в этом документе называют «датчиком положения с акселерометром». Кроме того, датчик положения с акселерометром содержит процессор, выполненный с возможностью приема сигнала от акселерометра и преобразования принятого сигнала в сигнал, указывающий положение части устройства управления (например, исполнительного механизма, штока и т. д.), к которому прикреплен датчик положения с акселерометром. Сигнал положения может быть передан датчиком положения беспроводным способом на контроллер устройства управления, например, для обеспечения обратной связи, указывающей положение устройства управления. Например, датчик положения может передавать сигнал положения непосредственно на контроллер или датчик положения может передавать сигнал положения, например, с помощью беспроводного протокола ближнего действия, на устройство, которое работает совместно или в паре с датчиком положения, причем это устройство может передавать сигнал положения (в некоторых случаях, используя другой протокол) на контроллер устройства управления. Таким образом, положение устройства управления определяют в первую очередь с помощью датчика положения, который физически соединен или прикреплен к устройству управления, а не получают во вторую очередь с помощью другого, не соединенного с ним устройства, т. е. датчик положения с акселерометром, который прикреплен к устройству управления, может непосредственно измерять действительное положение и/или перемещение элементов или частей устройства управления.
[00043] Поскольку акселерометры, как правило, не столь чувствительны к изменениям температуры, как магниты, датчик с акселерометром может иметь значительно меньший температурный сдвиг по сравнению с датчиками известных систем магнитных датчиков. Более того, величина температурного сдвига акселерометра может позволять поддерживать точность в пределах заданных допусков системы управления технологическим процессом, не требуя применения каких-либо дополнительных циклов в процессе производства. Например, при использовании датчика положения с акселерометром может быть достигнута точность изменения температуры 1% или меньше.
[00044] Кроме того, поскольку установленный датчик положения с акселерометром выступает в качестве первичного датчика положения, устройство, которое работает совместно или в паре с ним (если оно используется), не обязательно тщательно ориентировать и позиционировать как датчики напряженности магнитного поля систем магнитных датчиков. Достаточно располагать устройство, которое работает совместно или в паре с датчиком, лишь в пределах дальности беспроводной передачи установленного датчика с акселерометром. Таким образом, в размещении устройства, которое работает совместно или в паре с датчиком, допустима большая гибкость. Например, устройство, которое работает совместно или в паре с датчиком, может быть просто установлено или размещено на кронштейне, который находится в любом месте в зоне действия беспроводной связи установленного датчика с акселерометром, и, таким образом может не требовать специального или многокомпонентного монтажного комплекта.
[00045] Более того, одно и то же устройство, которое работает совместно или в паре с датчиком (например, отдельное устройство, которое работает совместно или в паре с датчиком), вполне может принимать сигналы, указывающие положение, от множества датчиков положения с акселерометром, которые, соответственно, присоединены к различным соответствующим устройствам управления, при условии, что устройство, которое работает совместно или в паре с датчиком, находится в пределах зоны действия беспроводной связи каждого из множества датчиков положения с акселерометром. Такая конфигурация «многие к одному» позволяет снизить затраты на оборудование и монтаж, а также уменьшить использование полосы пропускания в беспроводных сетях (поскольку при этом в целом беспроводную сеть использует меньшее количество устройств). Кроме того, такая конфигурация «многие к одному» также позволяет облегчить установку контроллеров с множеством входов.
[00046] Кроме того, поскольку установленный датчик положения с акселерометром выступает в качестве первичного датчика положения, предпочтительно может потребоваться лишь одна калибровка датчика положения с акселерометром для целей определения положения, например, первоначальная калибровка на основании диапазона перемещения устройства управления. Для устройства, которое работает совместно или в паре с датчиком (если оно используется), может не требоваться калибровка для целей определения положения. По существу, замену устройств, которые работают совместно или в паре с датчиком, можно осуществлять без необходимости проведения какой-либо калибровки для определения положения.
[00047] Кроме того, характеристики датчиков положения с акселерометром, как правило, не зависят от размера части устройства управления, к которому они прикреплены. Таким образом, отпадает необходимость в изготовлении датчиков положения различных размеров или типов устройств управления для разного размера. Так, датчик одного типа может быть способен охватывать все возможные диапазоны перемещения различных устройств управления.
[00048] Раскрытые способы, системы и устройства, которые включают датчики положения с акселерометром, описаны ниже на примерах, в которых применен электропневматический цифровой контроллер клапана и клапан с пневматическим приводом. Однако следует понимать, что эти примеры не предполагают ограничения. По существу, раскрытые способы и устройства могут быть реализованы с помощью контроллеров других типов, с помощью клапанов, приводимых в действие другими способами, и/или с помощью устройств управления технологическими процессами, отличных от клапанов.
[00049] На ФИГ. 1 представлена схема системы 1 управления технологическим процессом, которая включает систему 2 управления и зону 4 управления технологическим процессом. Система 1 управления технологическим процессом может входить в состав технологической установки, например нефтяной, химической промышленной технологической установки и/или промышленной технологической установки иного типа, и система 1 управления технологическим процессом может управлять одним или большим количеством процессов, выполняемых технологической установкой. Система 2 управления может содержать рабочие станции, контроллеры, распределительные шкафы, платы ввода/вывода и/или компоненты управления системы управления технологическим процессом любого другого типа (не показаны на ФИГ. 1). В некоторых технологических установках система 2 управления находится в зоне, отличной от зоны 4 управления технологическим процессом, такой как закрытое помещение, например, для защиты системы 2 управления от шума, пыли, тепла и других нежелательных воздействий окружающей среды. Система 2 управления может быть соединена с возможностью осуществления связи с контроллером 20, например электропневматическим контроллером, расположенным в зоне 4 управления технологическим процессом. Система 2 управления может служить источником энергии для контроллера 20 или контроллер 20 может быть запитан от локального источника энергии, например внешнего источника напряжения, солнечной энергии, аккумуляторной батареи, конденсатора и т. д.
[00050] Контроллер 20 может включать интерфейс или вход 22 связи, через который сигналы от системы 2 управления и/или на систему 2 управления могут быть получены и переданы по одному или нескольким каналам 10 связи. Один или большее количество каналов 10 связи могут включать канал проводной связи, канал беспроводной связи или оба канала: проводной связи и беспроводной связи. Соответственно, интерфейс 22 может представлять собой проводной интерфейс, беспроводной интерфейс или как проводной, так и беспроводной интерфейс. Интерфейс 22 может быть выполнен с возможностью осуществлять связь с хостом управления, другими контроллерами и/или другими элементами, входящими в систему 2 управления. В одном из вариантов осуществления интерфейс 22 выполнен с возможностью осуществлять связь с другими контроллерами и/или элементами, входящими в зону 4 управления технологическим процессом.
[00051] В одном из вариантов осуществления интерфейс 22 может принимать от системы 2 управления по каналу(-ам) 10 управляющие сигналы, которые задают требуемое состояние клапана (или соответствуют требуемому состоянию клапана) для клапана 30, который расположен в зоне 4 управления технологическим процессом. Например, управляющие сигналы, принимаемые электропневматическим контроллером 20 с помощью интерфейса 22, могут обуславливать открывание, закрывание пневматического исполнительного механизма 31, соединенного с клапаном 30, или его перемещение в некоторое промежуточное положение.
[00052] Сигналы управления (например, входные сигналы), поступающие на интерфейс 22, могут включать, например, сигнал 4-20 мА, сигнал 0-10 вольт постоянного тока (VDC), радиосигнал и/или цифровые команды и т. д. Например, в случае, если управляющий сигнал представляет собой сигнал 4-20 мА, для осуществления связи посредством проводного соединения 10 с электропневматическим контроллером 20 может быть использован протокол цифровой передачи данных, такой как, например, широко известный магистральный протокол адресуемого дистанционного преобразователя (HART®). В другом примере управляющий сигнал может представлять собой управляющий радиосигнал, принимаемый посредством канала 10 беспроводной связи с использованием протокола WirelessHART. В других примерах управляющий сигнал может представлять собой сигнал 0-10 В постоянного тока или сигнал другого типа. Такая цифровая связь может быть использована для получения системой 2 управления от электропневматического контроллера 20 идентификационной информации, информации о рабочем состоянии и диагностической информации. Кроме того или в качестве альтернативы, с помощью такой цифровой связи система 2 управления может осуществлять управление клапаном 30 через соответствующий контроллер 20.
[00053] Приведенный в качестве примера электропневматический контроллер 20 по ФИГ. 1 может управлять положением исполнительного механизма 31 и, таким образом, положением клапана 30. Электропневматический контроллер 20 может содержать, хотя это и не показано, блок управления, электропневматический преобразователь (I/P) и пневматическое реле. В других примерах электропневматический контроллер 20 может содержать любые другие компоненты для управления и/или подачи давления на исполнительный механизм 31 клапана. Кроме того, электропневматический контроллер 20 может содержать другие компоненты обработки сигнала, такие как, например, аналого-цифровые преобразователи, фильтры (например, фильтры нижних частот, фильтры верхних частот, а также цифровые фильтры), усилители и т. д. Например, управляющий сигнал, принятый от системы 2 управления, может быть отфильтрован (например, с помощью фильтра нижних/верхних частот) перед обработкой блоком управления в электропневматическом контроллере 20.
[00054] В частности, электропневматический контроллер 20 может управлять положением исполнительного механизма 31 путем сравнения радиосигнала обратной связи или положения, генерируемого беспроводным датчиком или преобразователем 32 положения с акселерометром, с управляющим сигналом, поступающим от системы 2 управления. Радиосигнал обратной связи, генерируемый беспроводным датчиком 32 положения с акселерометром, может, например, соответствовать протоколу Zigbee®, Bluetooth®, Wi-Fi, сверхширокополосному (UWB), инфракрасному (IR) или какому-либо другому подходящему беспроводному протоколу ближнего действия или протоколу беспроводной связи в ближней зоне (NFC). В некоторых вариантах осуществления радиосигнал обратной связи по положению может соответствовать протоколу WirelessHART. В любом случае, радиосигнал обратной связи может содержать данные или значение, указывающее текущее положение клапана 31, и радиосигнал обратной связи может быть передан от датчика 32 на контроллер 20 по одному или большему количеству каналов 12 беспроводной связи.
[00055] Радиосигнал обратной связи по положению, генерируемый беспроводным датчиком или преобразователем 32 положения с акселерометром, может быть принят электропневматическим контроллером 20 на второй интерфейс или вход 24 связи, соединенный с беспроводным каналом (-ами) 12. Интерфейс 24 может включать беспроводной приемопередатчик или беспроводной приемник. Электропневматический контроллер 20 может определять сигнал обратной связи на основании радиосигнала обратной связи или положения, принимаемого от беспроводного преобразователя 32 положения с акселерометром через второй интерфейс 24. В одном из вариантов осуществления первый интерфейс 22 и второй интерфейс 24 могут быть объединены в единый беспроводной интерфейс.
[00056] Сигнал управления, обеспечиваемый системой 2 управления, может быть использован электропневматическим контроллером 20 в качестве заданного значения или опорного сигнала, соответствующего требуемой операции (например, требуемому положению, соответствующему проценту от рабочего интервала управляющего клапана 30) клапана 30. Блок управления (не показан) в электропневматическом контроллере 20 может сравнивать радиосигнал обратной связи с управляющим сигналом, используя управляющий сигнал и радиосигнал обратной связи в качестве значений в алгоритме или способе управления положением для определения значения управления на исполнительный механизм. Способ управления положением осуществляют путем определения с помощью блока управления (например, вычисления) значения управления на исполнительный механизм на основании разности между сигналом обратной связи и управляющим сигналом. В одном из вариантов осуществления вычисленная разность соответствует величине, на которую электропневматический контроллер 20 должен изменить положение исполнительного механизма 31, соединенного с клапаном 30. В одном из вариантов осуществления вычисленное значение управления на исполнительный механизм также соответствует току, генерируемому блоком управления, который обуславливает генерирование электропневматическим преобразователем (I/P), расположенным в электропневматическом контроллере 20, пневматического давления. Электропневматический контроллер 20 выдает сигнал управления на исполнительный механизм через выход 25 для управления, например, клапаном 30.
[00057] В одном из вариантов осуществления электропневматический преобразователь (I/P) в электропневматическом контроллере 20 включен в выход 25. Электропневматический преобразователь может представлять собой преобразователь силы тока в давление, который генерирует магнитное поле на основании величины тока, проходящего через электромагнит. Электромагнит может магнитным способом управлять заслонкой, которая воздействует на сопло с возможностью изменять степень ограничения течения через сопло/заслонку для обеспечения пневматического давления, которое изменяется на основании среднего значения тока через электромагнит. Это пневматическое давление может быть усилено с помощью пневматического реле и подано на исполнительный механизм 31, соединенный с клапаном 30. Пневматическое реле в электропневматическом контроллере 20 может быть пневматически соединено с исполнительным механизмом 31 для подачи давления (не показано) воздуха на исполнительный механизм 31.
[00058] Например, значение управления, которое увеличивает ток, генерируемый блоком управления в электропневматическом контроллере 20, может обуславливать повышение пневматическим реле давления воздуха, подаваемого на пневматический исполнительный механизм 31, чтобы исполнительный механизм 31 перевел клапан 30 в закрытое положение. Аналогичным образом, значения управления, которые уменьшают ток, генерируемый блоком управления, могут обуславливать понижение пневматическим реле давления воздуха, подаваемого на пневматический исполнительный механизм 31, чтобы исполнительный механизм 31 перевел клапан 30 в открытое положение.
[00059] В других примерах выход 25 электропневматического контроллера 20 может включать преобразователь напряжения в давление, в этом случае сигнал управления на исполнительный механизм представляет собой напряжение, которое изменяется для обеспечения изменения давления на выходе для управления клапаном 30. Кроме того, другие примеры выходов могут быть реализованы с применением других видов текучей среды под давлением, которые включают сжатый воздух, гидравлическую текучую среду и т. д.
[00060] В одном из вариантов осуществления приведенный в качестве примера клапан 30 по ФИГ. 1 может содержать седло клапана, определяющее отверстие, которое обеспечивает проход для протекания текучей среды между впуском и выпуском. Клапан 30 может представлять собой, например, поворотный клапан, клапан с поворотом штока на четверть оборота, клапан с электроприводом, шибер или любое другое устройство управления. Пневматический исполнительный механизм 31, соединенный с клапаном 30, может быть функционально соединен с элементом управления течением посредством штока клапана, который перемещает элемент управления течением в первом направлении (например, в сторону от седла клапана) для обеспечения протекания текучей среды между впуском и выпуском и во втором направлении (например, по направлению к седлу клапана) для ограничения или прекращения протекания текучей среды между впуском и выпуском. Исполнительный механизм 31, соединенный с приведенным в качестве примера клапаном 30, может представлять собой поршневой исполнительный механизм двухстороннего действия, диафрагменный или поршневой исполнительный механизм одностороннего действия с возвратной пружиной или любой другой подходящий исполнительный механизм или устройство управления технологическим процессом.
[00061] Для управления расходом через клапан 30 клапан может быть соединен с беспроводным датчиком или преобразователем 32 положения с акселерометром. В одном из вариантов осуществления беспроводной преобразователь 32 положения с акселерометром содержит акселерометр 33 для определения положения исполнительного механизма 31, соединенного с клапаном 30, например, позиционный акселерометр 33. Например, акселерометр 33 может представлять собой акселерометр на основе микроэлектромеханических систем (МЭМС), например многоосевой МЭМС-акселерометр (например, 3-осевой МЭМС-датчик или другой подходящий многоосевой акселерометр).
[00062] Акселерометр 33 беспроводного преобразователя 32 положения с акселерометром может, как правило, отслеживать или определять положение исполнительного механизма 31 и, таким образом, положение элемента управления течением относительно седла клапана (например, открытое положение, закрытое положение, промежуточное положение и т. д.). В одном из вариантов осуществления беспроводной преобразователь 32 положения с акселерометром может генерировать, на основании показаний акселерометра 33, радиосигнал обратной связи и беспроводной преобразователь 32 положения с акселерометром может осуществлять передачу радиосигнала обратной связи на электропневматический контроллер 20. Радиосигнал обратной связи может отражать положение исполнительного механизма 31, соединенного с клапаном 30 и, таким образом, положение клапана 30. Приведенные в качестве примера способы и устройства, описанные в данном документе, позволяют осуществлять, с помощью электропневматического контроллера 20, прием сигнала обратной связи от приведенного в качестве примера беспроводного датчика или преобразователя 32 положения с акселерометром любого типа по ФИГ. 1, который может быть соединен с клапаном 30.
[00063] Как правило, позиционный акселерометр 33 беспроводного датчика или преобразователя 32 положения с акселерометром менее подвержен влиянию неблагоприятных воздействий окружающей среды, чем массивы магнитных датчиков. В частности, беспроводной преобразователь 32 положения с акселерометром может обеспечивать точные показания во всем диапазоне температур, воздействию которых он может быть подвержен в среде технологических установок, благодаря чему не требуется компенсация, например, в процессе его производства. Кроме того, беспроводной преобразователь 32 положения с акселерометром может содержать схему электромагнитного подавления, схему фильтрации шума, компоненты, обеспечивающие виброустойчивость, и/или компоненты защиты от излучений для дополнительной изоляции или защиты позиционного акселерометра 33 от других неблагоприятных воздействий окружающей среды.
[00064] Беспроводной преобразователь 32 положения с акселерометром может включать вход или соединение 35 для приема питания от локального источника питания или устройства 38 аккумулирования энергии. В одном из вариантов осуществления локальный источник питания или устройство 38 аккумулирования энергии входит в состав беспроводного датчика или преобразователя 32 положения с акселерометром как встроенный блок. В одном из вариантов осуществления локальный источник питания или устройство 38 аккумулирования энергии является перезаряжаемым. Например, локальный источник питания или устройство 38 аккумулирования энергии может представлять собой аккумуляторную батарею, конденсатор или другое перезаряжаемое устройство аккумулирования энергии. Может быть применен любой известный способ подзарядки локального источника питания или устройства 38 аккумулирования энергии, например, использование солнечной энергии; замена аккумуляторной батареи; получение или рекуперация энергии из локального тепла, вибрации и/или движения; временное подключение к источнику со штепсельным соединением, например, источнику питания переменного тока; индуктивная подзарядка с помощью бесконтактного зарядного устройства; или другой подходящий способ подзарядки. В варианте осуществления, показанном на ФИГ. 1, устройство 38 аккумулирования энергии соединено с устройством 40 для получения энергии, которое получает энергию от беспроводного датчика 32 положения с акселерометром для подзарядки устройства 38 аккумулирования энергии. Например, устройство 40 для получения энергии может получать энергию от акселерометра 33 и/или других элементов или частей датчика 32 положения.
[00065] Хотя электропневматический контроллер 20 и беспроводной преобразователь 32 положения с акселерометром на ФИГ. 1 показаны как расположенные в зоне 4 управления технологическим процессом, как электропневматический контроллер 20, так и беспроводной датчик или преобразователь 32 положения с акселерометром могут быть расположены в соответствующем различном производственном оборудовании и соединены друг с другом с возможностью осуществления связи посредством одного или большего количества каналов беспроводной связи, например, посредством каналов беспроводной связи, входящих в сеть беспроводной связи технологической установки или среды 1 управления. Например, беспроводной преобразователь 32 положения с акселерометром может быть расположен в среде с относительно высокой температурой и влажностью (например, 90% влажности и 180 градусов по Фаренгейту (°F) (82°С), а электропневматический контроллер 20 располагают в среде с регулируемыми условиями, установленными в 10% влажности и 72°F (22°С).
[00066] Кроме того, в одном из вариантов осуществления канал 12 беспроводной связи может представлять собой выделенное соединение между беспроводным преобразователем 32 положения с акселерометром и контроллером 20. В частности, между беспроводным преобразователем 32 положения с акселерометром и контроллером 20 отсутствует проводное соединение. Таким образом, для беспроводного датчика или преобразователя 32 положения с акселерометром не требуется каких-либо других соединений (кроме канала 12 беспроводной связи) для приема питания или для осуществления связи с контроллером 20. Так, согласно способам по настоящему изобретению для обеспечения питания беспроводного датчика 32 положения с акселерометром электрический изолятор не требуется. Предпочтительно, поскольку беспроводной датчик 32 положения с акселерометром может получать питание от локального источника 38 (который, в некоторых вариантах осуществления, является составной частью самого беспроводного датчика 32 положения с акселерометром), нет необходимости в прокладывании громоздких проводов (и нет необходимости в их техническом обслуживании) к преобразователю 32 для подачи на него питания. Кроме того, поскольку преобразователь 32 и контроллер 20 запитывают от различных, отдельных и отличающихся источников питания, отпадает необходимость в применении электрического изолятора для минимизации возможности замыкания через цепь заземления.
[00067] Кроме того, согласно способам по настоящему изобретению также нет необходимости в применении электрического изолятора для сигналов тока обратной связи, генерируемых преобразователем 32 через сопротивление, для вычисления контроллером 20 положения исполнительного механизма 31 преобразователя 32. В частности, вместо применения в контроллере 20 двух входов для определения перепада напряжения и необходимости вычисления контроллером 20 положения исполнительного механизма 31 на основании определенного перепада напряжения контроллер 20 просто принимает сигнал (например, пакет) от беспроводного преобразователя 32 положения с акселерометром на входе 24, соединенном с беспроводным каналом 12. Из поля радиосигнала контроллер 20 извлекает встроенное значение, которое указывает положение исполнительного механизма 31. В одном из вариантов осуществления встроенное значение из радиосигнала включает только входной сигнал или значение, принятое от беспроводного преобразователя 32 положения с акселерометром, на основании которого контроллер 20 определяет положение исполнительного механизма 31; во втором входном значении или втором значении от беспроводного преобразователя 32 положения с акселерометром нет необходимости. Соответственно, согласно способам по настоящему изобретению нет необходимости не только в электрическом изоляторе и проводах для подключения изолятора, клапана и контроллера, но и в дополнительном аппаратном обеспечении, времени обработки и запоминающем устройстве, необходимых для вычисления контроллером положения исполнительного механизма 31.
[00068] Подробная блок-схема беспроводного датчика или преобразователя 32 положения с акселерометром показана на ФИГ. 2. Как уже обсуждалось ранее, беспроводной датчик 32 положения с акселерометром может содержать позиционный акселерометр 33, соединенный с исполнительным механизмом 31 клапана 30. Беспроводной датчик 32 положения с акселерометром может дополнительно содержать процессор 50, соединенный с акселерометром 33 и запоминающим устройством 52. Запоминающее устройство 52 может представлять собой материальное, энергонезависимое запоминающее устройство и может включать один или большее количество машиночитаемых носителей данных. Например, запоминающее устройство 52 может быть реализовано в виде одного или большего количества полупроводниковых запоминающих устройств, запоминающих устройств, считываемых магнитным способом, запоминающих устройств, считываемых оптическим способом и/или любого другого подходящего материального, энергонезависимого машиночитаемого носителя данных. Запоминающее устройство 52 способно хранить выполняемые на вычислительной машине команды 53, выполняемые процессором 50 для преобразования выходного сигнала или сигнала, генерируемого акселерометром 33, в значение, которое указывает положение исполнительного механизма 31 клапана 30, и записи этого значения в поле радиосигнала положения. Выполняемые на вычислительной машине команды 53 могут также выполнять для осуществления передачи радиосигнала положения преобразователем 32 посредством беспроводного интерфейса 55. Беспроводной интерфейс 55 может быть соединен с возможностью осуществления связи с одним или большим количеством каналов 12 беспроводной связи, причем беспроводной интерфейс 55 может включать приемопередатчик или может включать передатчик и приемник. Таким образом, процессор 50, команды 53 и/или беспроводной интерфейс 55 могут выступать в качестве генератора 58 сигнала обратной связи по положению, который генерирует и передает сигналы обратной связи по положению от датчика 32 на контроллер 20 и/или на другие устройства системы управления технологическим процессом. В некоторых вариантах осуществления беспроводной датчик или преобразователь 32 положения с акселерометром может включать один или большее количество признаков, аспектов и/или способов в соответствии с вариантами осуществления беспроводного преобразователя положения, описанного в вышеупомянутой заявке на патент США № 14/086,102, озаглавленной «Wireless Position Transducer for a Valve» (Беспроводный преобразователь положения для клапана) и поданной 21 ноября 2013 года.
[00069] Например, в некоторых случаях радиосигнал обратной связи по положению представляет собой один или большее количество пакетов в соответствии с протоколом беспроводной связи HART, каналы 12 беспроводной связи включены в ячеистую сеть беспроводной связи системы 1 управления технологическим процессом и пакет передают и принимают по каналу 12 беспроводной связи в соответствии с таблицей, генерируемой диспетчером ячеистой сети беспроводной связи. Например, диспетчер сети может генерировать таблицу передачи данных по сети (например, «сетевую таблицу»), определяющую интервалы передачи пакетов, генерируемых беспроводным преобразователем 32 положения с акселерометром, таким образом, чтобы пакеты поступали на контроллер 20, для точного и надежного управления клапаном 30 и процессом, в котором применяют клапан 30. В одном из вариантов осуществления одна или большее количество частей таблицы, относящейся к беспроводному ячеистому преобразователю 32, могут быть переданы в преобразователь 32 (например, от диспетчера сети по сети беспроводной связи) и храниться в запоминающем устройстве 52 таким образом, чтобы процессор 50 мог вызывать пакеты или сигналы для передачи на контроллер 20 в соответствии с хранимой таблицей.
[00070] В некоторых случаях в соответствии с протоколом беспроводной связи ближнего действия и/или протоколом беспроводной связи в ближней зоне радиосигнал положения представляет собой один или большее количество пакетов. Например, радиосигнал положения может соответствовать протоколу Zigbee, Wi-Fi или Bluetooth. В некоторых вариантах осуществления радиосигнал положения может соответствовать сверхширокополосному (UWB) или инфракрасному (IR) протоколу. Как правило, радиосигнал положения соответствует протоколу беспроводной связи, который предполагает низкое энергопотребление.
[00071] Радиосигнал положения могут передавать посредством беспроводного интерфейса 55 на электропневматический контроллер 20 для управления клапаном 30. В одном из вариантов осуществления радиосигнал положения может быть дополнительно или альтернативно передан посредством беспроводного интерфейса 55 на систему 2 управления для контроля положения или для других целей. Например, радиосигнал положения может быть передан на хост системы управления системы 2 управления. В некоторых вариантах осуществления протокол, используемый для передачи радиосигнала положения на контроллер 20 и систему 2 управления, может представлять собой один и тот же протокол беспроводной связи, а в некоторых вариантах осуществления протокол, используемый для передачи радиосигнала положения на контроллер 20, может отличаться от беспроводного протокола, используемого для передачи радиосигнала положения на систему 2 управления. Радиосигнал положения может быть передан на систему 2 управления либо непосредственно, либо через один или большее количество промежуточных узлов сети беспроводной связи установки или системы 1 управления технологическим процессом. В одном из вариантов осуществления процессор может осуществлять передачу пакетов или сигналов на систему 2 управления в соответствии с таблицей, хранимой в запоминающем устройстве 52, причем эту таблицу генерирует диспетчер сети беспроводной связи, соединенный с беспроводным интерфейсом 55.
[00072] В варианте осуществления, показанном на ФИГ. 2, беспроводной датчик или преобразователь 32 положения с акселерометром содержит устройство 40 для получения энергии. Устройство 40 для получения энергии может получать энергию от одной или большего количества частей или элементов датчика 32, например, от акселерометра 32, процессора 50 и/или интерфейса 55 связи. Например, устройство 40 для получения энергии может аккумулировать локальное тепло, вибрацию и/или движение и может обеспечивать полученной энергией устройство 38 аккумулирования энергии. В некоторых вариантах осуществления (не показаны) устройство 40 для получения энергии исключено из датчика или преобразователя 32.
[00073] На ФИГ. 2 также представлена подробная блок-схема электропневматического контроллера 20 по ФИГ. 1. Как уже обсуждалось ранее, контроллер 20 включает первый вход или интерфейс 22 для приема управляющего сигнала от системы 2 управления и второй вход или интерфейс 24 для приема радиосигнала положения от беспроводного датчика или преобразователя 32 положения с акселерометром. Беспроводной интерфейс 24 может быть соединен с возможностью осуществления связи с одним или большим количеством каналов 12 беспроводной связи, посредством которых принимают радиосигнал положения, генерируемый беспроводным преобразователем 32 положения с акселерометром. Беспроводной интерфейс 24 может включать приемопередатчик или может включать передатчик и приемник.
[00074] Первый интерфейс 22 может представлять собой проводной интерфейс, беспроводной интерфейс или проводной и беспроводной интерфейс, имеющий соединение с одним или большим количеством каналов 10 связи. В вариантах осуществления, в которых первый интерфейс 22 включает беспроводной интерфейс, первый интерфейс 22 и второй интерфейс 24 могут представлять собой единый объединенный беспроводной интерфейс. В одном из вариантов осуществления один или большее количество каналов 10 связи и/или один или большее количество каналов 12 связи входят в состав ячеистой сети беспроводной связи технологической установки или системы 1.
[00075] Электропневматический контроллер 20 дополнительно содержит блок управления или процессор 60, соединенный с запоминающим устройством 62, входами 22, 24 и выходом 25. Запоминающее устройство 62 может представлять собой материальное, энергонезависимое запоминающее устройство и может включать один или большее количество машиночитаемых носителей данных. Например, запоминающее устройство 62 может быть реализовано в виде одного или большего количества полупроводниковых запоминающих устройств, запоминающих устройств, считываемых магнитным способом, запоминающих устройств, считываемых оптическим способом и/или любого другого подходящего материального, энергонезависимого машиночитаемого носителя данных. Запоминающее устройство 62 способно хранить выполняемые на вычислительной машине команды, выполняемые процессором 60 для определения, на основании принятого от второго интерфейса 24 радиосигнала положения и принятого от первого интерфейса 22 управляющего сигнала, значения управляющего сигнала на исполнительный механизм, передаваемого через выход 25 для управления клапаном 30. Например, выполняемые на вычислительной машине команды для определения управляющего сигнала на исполнительный механизм содержат алгоритм или способ управления положением, загружаемый во время конфигурирования и/или в режиме реального времени из системы 2 управления.
[00076] На ФИГ. 3 показана приведенная в качестве примера схема 68 соединений, на которой беспроводной датчик или преобразователь 32 положения с акселерометром соединен с возможностью осуществления связи с устройством 70, которое работает совместно или в паре с датчиком, посредством канала 71a беспроводной связи, а устройство 70, которое работает совместно или в паре с датчиком, соединено с возможностью осуществления связи с контроллером 20 посредством другого канала 71b связи. Схема 68 соединений может включать беспроводной датчик 32 положения с акселерометром, клапан 30 и/или контроллер 20 по ФИГ. 1 и 2. Такая схема 68 соединений может быть предпочтительной, например, когда прямое беспроводное соединение между датчиком 32 и контроллером 20 является недостаточно оптимальным из-за топологии технологической установки и/или по другим причинам.
[00077] Например, в некоторых технологических установках применение такой схемы 68 соединений может быть предпочтительным для снижения затрат на оборудование и монтаж. Как показано на ФИГ. 3, устройство 70, которое работает совместно или в паре с датчиком, может работать в паре не только с датчиком или преобразователем 32 с акселерометром, но также может быть сопряжено с одним или большим количеством других датчиков или преобразователей 72a-72n, каждый из которых может быть по меньшей мере частично установлен на соответствующем устройстве 75a-75n управления для обеспечения обратной связи по положению для соответствующего устройства 75a-75n управления. Множество других датчиков 72a-72n может включать один или большее количество других беспроводных датчиков положения с акселерометром, один или большее количество беспроводных датчиков положения других типов (например, беспроводных датчиков положения, в которых используют магниты, массивы магнитов, потенциометры и т. д.) и/или один или большее количество традиционных проводных датчиков положения. Таким образом, в некоторых вариантах осуществления одно сопрягаемое устройство 70 может работать с множеством датчиков или преобразователей 32, 72a-72n и может маршрутизировать, ретранслировать или передавать сигналы обратной связи по положению, принимаемые от указанных датчиков из множества датчиков 32, 72-72n, на соответствующие принимающие контроллеры 20, 78a-78n. В некоторых случаях сопрягаемое устройство 70 может дополнительно маршрутизировать, ретранслировать или передавать один или большее количество принимаемых сигналов обратной связи по положению на одно или большее количество других устройств 80 в системе управления технологическим процессом, например, на хост, в архивное хранилище данных, пользовательский интерфейс и т. д.
[00078] В одном из вариантов осуществления устройство 70, которое работает совместно или в паре с датчиком, принимает радиосигнал обратной связи по положению от датчика 32 с использованием первого беспроводного протокола (например, первого беспроводного протокола ближнего действия, например, Bluetooth) и устройство 70, которое работает совместно или в паре с датчиком, передает результирующий сигнал обратной связи по положению с использованием второго беспроводного протокола (например, WirelessHART или второго беспроводного протокола ближнего действия, например, Zigbee) или с использованием проводного протокола (например, HART). В одном из вариантов осуществления устройство 70, которое работает совместно или в паре с датчиком, принимает радиосигнал обратной связи по положению от датчика 32 и передает результирующий сигнал обратной связи по положению с использованием того же беспроводного протокола.
[00079] На ФИГ. 4 изображен один из вариантов осуществления 82 устройства 70, которое работает совместно или в паре с датчиком, по ФИГ. 3. Как показано на ФИГ. 4, устройство 82, которое работает совместно или в паре с датчиком, включает беспроводной интерфейс 85 связи для приема данных, соединенный с каналом 71a беспроводной связи, посредством которого устройство 82, которое работает совместно или в паре с датчиком, принимает данные от беспроводного датчика 32 положения с акселерометром. Например, устройство 82, которое работает совместно или в паре с датчиком, принимает сигналы обратной связи по положению от датчика 32 положения с акселерометром посредством канала 71а беспроводной связи и беспроводного интерфейса 85 связи для приема данных. Кроме того, поскольку устройство 82, которое работает совместно или в паре с датчиком, способно принимать данные от одного или большего количества других беспроводных датчиков или преобразователей 72a-72n, с которыми сопряжено устройство 82, устройство 82, которое работает совместно или в паре с датчиком, может включать беспроводные интерфейсы 85 связи для приема данных различных типов (например, Zigbee, Bluetooth, Wi-Fi, WirelessHART и т. д.) для приема сигналов обратной связи по положению от беспроводных датчиков или преобразователей 72a-72n положения различных типов. В некоторых случаях устройство 82, которое работает совместно или в паре с датчиком, может включать один или большее количество проводных интерфейсов 88 связи для приема данных для приема сигналов обратной связи по положению от одного или большего количества традиционных проводных датчиков 72a-72n.
[00080] Кроме того, устройство 82, которое работает совместно или в паре с датчиком, включает маршрутизатор или средства 90 маршрутизации для определения принимающего контроллера или устройства принимаемого сигнала обратной связи по положению. В примере, показанном на ФИГ. 4, маршрутизатор 90 содержит процессор 90a и энергонезависимое, материальное запоминающее устройство 90b, которое хранит выполняемые на вычислительной машине команды 92a и маршрутные данные 92b. Процессор 90a может выполнять хранимые команды 92a для определения, с помощью маршрутных данных 92b, контроллера(-ов) или устройства (устройств) конкретного получателя конкретного сигнала обратной связи по положению и для осуществления передачи конкретного сигнала обратной связи по положению на устройство(-а) получателя с использованием соответствующего интерфейса 95 связи для передачи данных. Например, сигнал обратной связи по положению, указывающий положение исполнительного механизма 31 клапана, может быть передан на контроллер 20 посредством интерфейса 95 связи для передачи данных и канала 71b связи. Интерфейс 95 связи для передачи данных может поддерживать беспроводной протокол, например, Zigbee, Bluetooth, Wi-Fi, WirelessHART и т. д. В некоторых конфигурациях интерфейс 95 связи для передачи данных может поддерживать протокол проводной связи, например, Ethernet, HART®, FOUNDATION® Fieldbus, Ethernet, EthernetIP, DeviceNet, CompNet, ControlNet, Modbus или специальный протокол для больших передачи массивов данных для управления технологическим процессом. В некоторых вариантах осуществления устройство 82, которое работает совместно или в паре с датчиком, включает множество интерфейсов 95 связи для передачи данных на множество контроллеров или устройств получателей различных типов. В некоторых случаях интерфейс(-ы) 95 связи для передачи данных и интерфейсы 85, 88 связи для приема данных представляют собой одинаковые или объединенные интерфейсы связи.
[00081] На ФИГ. 5 показана приведенная в качестве примера сеть 100 управления технологическим процессом, в которую могут быть включены беспроводной преобразователь 32 положения с акселерометром по ФИГ. 1 и, в некоторых случаях, устройство 70, 82 обратной связи. В одном из вариантов осуществления сеть 100 управления технологическим процессом включают в систему 1 управления по ФИГ. 1. В частности, сеть 100 может включать сеть 112 автоматизации установки и сеть 114 связи. В варианте осуществления сети 100 управления технологическим процессом, показанном на ФИГ. 1, сеть 114 связи представлена в виде ячеистой сети беспроводной связи. В одном из вариантов осуществления сеть 114 связи поддерживает беспроводной протокол HART (магистральный протокол адресуемого дистанционного преобразователя), например, протокол «беспроводная сеть HART». Однако в некоторых вариантах осуществления сети 100 сеть 114 связи может поддерживать проводной протокол HART, например, «проводная сеть HART». В некоторых вариантах осуществления сеть 100 может включать как проводную, так и беспроводную сеть 114 HART.
[00082] Сеть 112 автоматизации установки может включать одну или большее количество стационарных рабочих станций 116 и одну или большее количество портативных рабочих станций 118, соединенных магистральной линией 120 связи. Рабочие станции 116, 118 взаимозаменяемо упоминаются в данном документе как «рабочие станции», «хосты системы управления», «хосты управления» или «хосты» сети 100 управления технологическим процессом. Магистральная линия 120 связи может быть реализована на основе Ethernet, RS-485, Profibus DP или другого подходящего протокола связи.
[00083] Сеть 112 автоматизации установки и беспроводная сеть 114 HART могут быть соединены через межсетевой шлюз 122. В частности, межсетевой шлюз 122 может быть соединен с магистральной линией 120 связи проводным способом и может осуществлять связь с сетью 112 автоматизации установки с использованием любого подходящего известного протокола. Межсетевой шлюз 122 может быть реализован в виде отдельного устройства, в виде платы, вставляемой в гнездо расширения хостов или рабочих станций 116 или 118, или в виде части подсистемы ввода-вывода системы на основе ПЛК или на основе распределенной системы управления (DCS), или же каким-либо иным способом. Межсетевой шлюз 122 может обеспечивать доступ к различным сетевым устройствам беспроводной сети 114 HART для приложений, работающих в сети 112. В дополнение к преобразованию протоколов и команд межсетевой шлюз 122 может обеспечивать синхронное тактирование, используемое для установки временных интервалов и суперкадров (наборов временных интервалов связи с равными временными промежутками) схемы диспетчеризации беспроводной сети 114 HART.
[00084] В некоторых ситуациях сети могут включать более одного межсетевого шлюза 122. Эти дополнительные межсетевые шлюзы могут быть использованы для повышения эффективной пропускной способности и надежности сети за счет обеспечения дополнительной ширины пропускания канала связи между беспроводной сетью HART и сетью 112 автоматизации установки или внешним миром. С другой стороны, межсетевой шлюз 122 может запрашивать полосу пропускания в соответствующей сетевой службе в соответствии с потребностями межсетевого шлюза в обмене данными в беспроводной сети HART. Во время функционирования системы межсетевой шлюз 122 может дополнительно пересматривать требуемую полосу пропускания. Например, межсетевой шлюз 122 может принять запрос от хоста, который находится за пределами беспроводной сети 114 HART, на получение большого объема данных. Затем, для осуществления этой транзакции межсетевой шлюз 122 может запросить дополнительную полосу пропускания в выделенной службе, например, в диспетчере сети. После завершения транзакции межсетевой шлюз 122 может запросить возврат прежнего значения полосы пропускания.
[00085] В некоторых вариантах осуществления межсетевой шлюз 122 функционально разделен на виртуальный межсетевой шлюз 124 и одну или большее количество точек 125a, 125b доступа к сети. Точки 125a, 125b доступа к сети могут представлять собой отдельные физические устройства, имеющие проводное соединение с межсетевым шлюзом 122, для повышения полосы пропускания и общей надежности беспроводной сети 114 HART. Однако хотя на ФИГ. 1 показано проводное соединение 26 между физически отдельным межсетевым шлюзом 122 и точками 125a, 125b доступа, подразумевается, что элементы 122-126 также могут представлять собой единое устройство. Поскольку точки 125a, 125b доступа к сети могут быть физически отдалены от межсетевого шлюза 122, все эти точки 125а, 125b доступа могут быть стратегически размещены в нескольких различных местах. В дополнение к повышению полосы пропускания применение множества точек 125а, 125b доступа позволяет повысить общую надежность сети за счет компенсации потенциально плохого качества сигнала в одной точке доступа сигналом в одной или большем количестве других точек доступа. Наличие нескольких точек 125а, 125b доступа также обеспечивает избыточность в случае отказа в одной или большем количестве точек 125a, 125b доступа.
[00086] Межсетевой шлюз 122 может дополнительно содержать программный модуль 127 диспетчера сети (например, «диспетчер сети») и программный модуль 128 диспетчера безопасности (например, «диспетчер безопасности»). В другом варианте осуществления диспетчер 127 сети и/или диспетчер 128 безопасности могут работать на одном из хостов 116, 118 управления технологическим процессом сети 112 автоматизации установки. Например, диспетчер 127 сети может работать на хосте 116 и диспетчер 128 безопасности может работать на хосте 118. Диспетчер 127 сети может обеспечивать конфигурирование сети 114; диспетчеризацию передачи данных между устройствами, входящими в сеть 114, например, беспроводными HART-устройствами (т. е. конфигурирование суперкадров); определение таблицы передачи данных и осуществление передачи по меньшей мере ее части устройствам-получателям и контроллерам; управление таблицами маршрутизации; а также контроль и информирование о состоянии беспроводной сети 114 HART. Хотя поддерживаются избыточные диспетчеры 27 сети, предполагается, что беспроводная сеть 114 HART должна включать только один активный диспетчер 127 сети. В одном возможном варианте осуществления диспетчер 127 сети анализирует информацию, касающуюся структуры сети, возможность и скорость обновления каждого сетевого устройства, а также другую соответствующую информацию. Кроме того, диспетчер 127 сети может определять маршруты и таблицы передачи данных на сетевые устройства, от сетевых устройств и между сетевыми устройствами с учетом этих факторов. В одном из вариантов осуществления диспетчер 127 сети может входить в состав одного из хостов 116, 118 управления.
[00087] Согласно ФИГ. 5 беспроводная сеть 114 HART может включать одно или большее количество полевых устройств или устройств управления 130-140. Как правило, системы управления технологическим процессом, применяемые в химических, нефтяных и других технологических установках, включают такие полевые устройства, как клапаны, позиционеры клапанов, переключатели, датчики (например, датчики температуры, давления и расхода), насосы, вентиляторы и т. д. Полевые устройства могут выполнять функции управления технологическим процессом в рамках технологического процесса, управляемого посредством сети 100 управления технологическим процессом. Функция управления технологическим процессом может включать, например, открытие или закрытие клапанов и/или контроль или проведение измерений параметров технологического процесса. В сети 114 беспроводной связи HART полевые устройства 130-140 являются производителями и потребителями беспроводных пакетов HART.
[00088] Внешний хост 141 может быть соединен с внешней сетью 143, которая, в свою очередь, может быть соединена с сетью 112 автоматизации установки через маршрутизатор 144. Внешняя сеть 143 может представлять собой, например, глобальную компьютерную сеть (WWW). Хотя внешний хост 141 не принадлежит ни к сети 112 автоматизации установки, ни к беспроводной сети 114 HART, внешний хост 141 может осуществлять доступ к устройствам в обоих сетях 112, 114 через маршрутизатор 144. Соответственно, сеть 114 связи и сеть 112 автоматизации установки системы 100 управления технологическим процессом могут представлять собой частные сети, при условии, что осуществление доступа к сетям 112, 114 является безопасным. Например, подключение устройств к сети 112 и/или к сети 114 может предполагать авторизацию. Кроме того, внешний хост 141 может управлять безопасным сетевым доступом при осуществлении связи с внешней сетью 143.
[00089] Для беспроводной сети 114 HART может быть использован протокол, который обеспечивает эксплуатационные характеристики, характерные для проводных HART-устройств. Варианты применения этого протокола могут включать контроль данных технологического процесса, контроль критически важных данных (с более строгими требованиями к рабочим характеристикам), калибровку, контроль состояния и диагностический контроль устройства, выявление неисправностей полевого устройства, ввод в эксплуатацию и оперативно-диспетчерское управление технологическим процессом. Эти варианты применения предусматривают применение для беспроводной сети 114 HART протокола, который в случае необходимости может позволять осуществлять быстрое обновление, передавать, когда это требуется, большие объемы данных, а также поддерживать сетевые устройства, лишь временно подключаемые к беспроводной сети 114 HART для ввода в эксплуатацию и выполнения работ по техническому обслуживанию.
[00090] В одном варианте осуществления беспроводной протокол, поддерживающий сетевые устройства беспроводной сети 114 HART, является расширением HART, общепризнанным промышленным стандартом, который поддерживает простой технологический процесс и применение проводной среды. Беспроводной протокол HART может быть использован с целью установления стандарта беспроводной связи для применения в технологических процессах и может дополнительно расширять применение протокола связи HART и усиливать преимущества, которые он обеспечивает для промышленности за счет улучшения технологии HART в плане поддержки беспроводной автоматизации технологических процессов.
[00091] Согласно ФИГ. 5 полевые устройства или устройства 130-136 управления могут представлять собой беспроводные HART-устройства. Другими словами, полевые устройства 130, 132а, 132b, 134 или 136 могут быть выполнены как единое целое и поддерживать все уровни стека беспроводных протоколов HART. В сети 100 полевое устройство 130 может представлять собой беспроводной измеритель расхода HART, полевое устройство 132b может соответствовать беспроводным датчикам давления HART, а полевое устройство 136 может представлять собой беспроводной датчик давления HART.
[00092] В частности, полевое устройство 134 может представлять собой клапан или позиционер клапана, в том числе беспроводной преобразователь положения с акселерометром (например, беспроводной преобразователь 32 положения с акселерометром по ФИГ. 1), а полевое устройство 132a может представлять собой контроллер (например, контроллер 20 по ФИГ. 1), который принимает считанные показания положения от беспроводного преобразователя положения с акселерометром полевого устройства 134. В одном из вариантов осуществления каждый из хоста 116 управления и/или хоста 118 управления принимает по меньшей мере некоторые из показаний положения от полевого устройства 134, например, посредством ячеистой сети 114 беспроводной связи, межсетевого шлюза 122 и сети 120 автоматизации установки.
[00093] Кроме того, беспроводная сеть 114 HART может включать маршрутизатор 160. Маршрутизатор 160 может представлять собой сетевое устройство, которое перенаправляет пакеты от одного сетевого устройства к другому. Сетевое устройство, которое функционирует в качестве маршрутизатора, может использовать внутренние таблицы маршрутизации для принятия решения о том, какому сетевому устройству следует отправить конкретный пакет. Обособленные маршрутизаторы, такие как маршрутизатор 160, могут не потребоваться в вариантах осуществления, в которых все устройства беспроводной сети 114 HART поддерживают маршрутизацию. Однако добавление выделенного маршрутизатора 160 к сети может быть целесообразным (например, для расширения сети или для экономии энергии полевого устройства в сети).
[00094] Все устройства, непосредственно подключенные к беспроводной сети 114 HART, могут упоминаться как сетевые устройства. В частности, беспроводные полевые HART-устройства или HART-устройства 130-136 управления, маршрутизаторы 60, межсетевой шлюз 122 и точки 125а, 125b доступа являются, в контексте маршрутизации и диспетчеризации, сетевыми устройствами или узлами беспроводной сети 114 HART. Для обеспечения очень устойчивой и легко расширяемой сети предполагают, что все сетевые устройства могут поддерживать маршрутизацию и каждое сетевое устройство может быть глобально идентифицировано по своему HART-адресу. Кроме того, каждое сетевое устройство может хранить информацию, относящуюся к скорости обновления, сеансам соединений и ресурсам устройства. Иными словами, каждое сетевое устройство поддерживает актуальность информации, относящейся к маршрутизации и диспетчеризации. Диспетчер 127 сети передает эту информацию на сетевые устройства при инициализации или повторной инициализации сетевых устройств, в случае подключения к сети новых устройств или всякий раз, когда диспетчер сети обнаруживает или инициирует изменение топологии или диспетчеризации беспроводной сети 114 HART.
[00095] Согласно ФИГ. 5 в паре сетевых устройств, соединенных с помощью прямого беспроводного соединения 165, каждое устройство распознает другое как соседний узел. Таким образом, сетевые устройства беспроводной сети 114 HART могут образовывать большое количество соединений 165. Возможность и целесообразность установления прямого беспроводного соединения 165 между двумя сетевыми устройствами определяется несколькими факторами, например, физическим расстоянием между узлами, наличием препятствий и помех между узлами, уровнем сигнала в каждом из двух узлов и т. д. Кроме того, два или большее количество прямых беспроводных соединений 165 могут образовывать каналы связи между узлами, которые не могут образовывать прямое беспроводное соединение 165. Например, прямое беспроводное соединение 165 между беспроводным портативным HART-устройством 155 и беспроводным HART-устройством 136 вместе со вторым прямым беспроводным соединением 165 между беспроводным HART-устройством 136 и маршрутизатором 160 образуют канал связи между устройствами 155 и 160.
[00096] Каждое беспроводное соединение 165 характеризуется большим набором параметров, связанных с частотой передачи, способом осуществления доступа к радиоресурсам и т. д. Для среднего специалиста в данной области техники будет очевидно, что, как правило, протоколы беспроводной связи могут работать на выделенных частотах, например, на частотах, установленных Федеральной комиссией по связи (FCC) в США или в нелицензированной части радиочастотного спектра (2,4 ГГц). Хотя обсуждаемые в данном документе система и способ могут быть применены к беспроводной сети, работающей на любой выделенной частоте или в любом выделенном диапазоне частот, рассматриваемый ниже вариант осуществления относится к беспроводной сети 114 HART, работающей в нелицензированной или общедоступной части радиочастотного спектра. В соответствии с этим вариантом осуществления при необходимости беспроводная сеть 114 HART может быть легко активирована и настроена для функционирования в конкретном нелицензированном диапазоне частот.
[00097] На ФИГ. 6 представлена блок-схема приведенного в качестве примера способа 200 обеспечения обратной связи по положению на контроллер устройства управления. В одном из вариантов осуществления способ 200 может быть выполнен с помощью процессора и/или другого элемента беспроводного датчика или преобразователя положения с акселерометром, например, процессором 50 беспроводного датчика или преобразователя 32 положения с акселерометром по ФИГ. 1, или с помощью другого датчика или преобразователя положения. Способ 200 может быть осуществлен в сочетании с приведенным в качестве примера электропневматическим контроллером 20, причем некоторое количество приведенных в качестве примера конфигураций показано на ФИГ. 1-5, и/или с помощью других подходящих контроллеров, устройств управления и/или конфигураций.
[00098] Способ 200 может быть реализован с использованием любой комбинации любых из указанных выше способов, такой как, например, любая комбинация аппаратно реализованного программного обеспечения, программного обеспечения, дискретной логики и/или аппаратного обеспечения. Кроме того, могут быть использованы многие другие способы реализации приведенных в качестве примера операций по ФИГ. 6. Например, можно изменять порядок выполнения этапов и/или можно изменять, исключать, разделять или комбинировать один или большее количество описанных этапов. Кроме того, этапы способа 200, частично или полностью, могут быть выполнены последовательно и/или могут быть выполнены параллельно с помощью, например, отдельных потоков обработки, процессоров, устройств, дискретной логики, схем и т. д. Следует отметить, что способ 200 описан с одновременной ссылкой на ФИГ. 1-5 для наглядности пояснения, однако это пояснение не предполагает ограничения.
[00099] На этапе 202 способ 200 включает прием сигнала (например, выходного сигнала), генерируемого акселерометром, который физически соединен с устройством управления или его частью. В одном из вариантов осуществления акселерометр входит в состав датчика или преобразователя положения, установленного на исполнительном механизме устройства управления. Например, акселерометр может быть составной частью беспроводного датчика или преобразователя 32 положения с акселерометром, установленного на штоке или исполнительном механизме 31 клапана 30, как, например, изображено на ФИГ. 1. В одном из вариантов осуществления сигнал или показание сигнала может принимать (этап 202) процессор, который входит в состав датчика положения (например, процессор 50 датчика 32). В одном из вариантов осуществления процессор и акселерометр могут быть соединены с возможностью осуществления связи, но входить в состав различных устройств (не показано).
[000100] Способ 200 дополнительно включает преобразование принятого сигнала акселерометра в значение, указывающее положение устройства управления или его части, к которой присоединен акселерометр (этап 205). В одном из вариантов осуществления это преобразование осуществляют на основе калибровки акселерометра или на основе калибровки датчика положения с акселерометром. Например, способ 200 в некоторых случаях может включать калибровку преобразователя или датчика положения (этап 208). Калибровка преобразователя или датчика положения (этап 208) может включать определение значения или сигнала, генерируемого акселерометром при известном положении устройства управления или его части, к которой прикреплен акселерометр (например, начальном или известном положении исполнительного механизма 31 клапана, соответствующем какому-либо положению клапана, например, полностью открытому, полностью закрытому или какому-либо другому известному положению клапана), и сохранение начального или калиброванного значения, указывающего начальное или калиброванное положение, в запоминающее устройство. Затем на этапе 205 способа 200 могут получать сохраненное, откалиброванное значение из запоминающего устройства и использовать откалиброванное значение для преобразования принятого сигнала акселерометра в текущее значение обратной связи по положению (этап 205). В одном из вариантов осуществления калибровку производят одноразово.
[000101] Значение обратной связи по положению, указывающее положение исполнительного механизма, может быть встроено в поле беспроводного сигнала обратной связи по положению. В одном из вариантов осуществления беспроводной сигнал обратной связи по положению соответствует беспроводному протоколу HART. В одном из вариантов осуществления беспроводной сигнал обратной связи по положению соответствует беспроводному протоколу ближнего действия или протоколу беспроводной связи в ближней зоне (NFC), например, Zigbee, UWB, Bluetooth и т. д.
[000102] Способ 200 включает осуществление беспроводной передачи, с использованием беспроводного протокола, беспроводного сигнала обратной связи по положению на электропневматический контроллер клапана для управления клапаном (этап 210). В одном из вариантов осуществления беспроводной сигнал обратной связи по положению непосредственно передают с беспроводного датчика 32 положения с акселерометром на электропневматический контроллер 20 для управления клапаном 30. В одном из вариантов осуществления беспроводной сигнал обратной связи по положению передают с беспроводного датчика 32 положения с акселерометром на устройство 70, которое работает совместно или в паре с датчиком, расположенное между беспроводным датчиком 32 положения с акселерометром и контроллером 20 устройства 30 управления. Например, беспроводной сигнал обратной связи по положению могут передавать с датчика 32 на сопрягаемое устройство 70, а сопрягаемое устройство 70 может осуществлять передачу беспроводного сигнала обратной связи по положению или его эквивалента на контроллер 20.
[000103] В одном из вариантов осуществления беспроводной сигнал положения представляет собой лишь входной сигнал, принимаемый от клапана 30, который необходим контроллеру 20 для управления клапаном 30. В одном из вариантов осуществления беспроводной сигнал положения соответствует протоколу беспроводной связи HART. В одном из вариантов осуществления беспроводной сигнал обратной связи по положению соответствует беспроводному протоколу ближнего действия или протоколу беспроводной связи в ближней зоне (NFC). В некоторых ситуациях беспроводной сигнал положения может быть передан на электропневматический контроллер по каналу связи ячеистой сети беспроводной связи, например, в соответствии с таблицей, генерируемой диспетчером сети ячеистой сети беспроводной связи. В одном из вариантов осуществления канал беспроводной связи, по которому передают сигнал, является единственным соединением между беспроводным преобразователем положения и контроллером.
[000104] В некоторых случаях способ 200 может включать осуществление беспроводной передачи сигнала на хост управления или другое устройство технологической установки или системы управления технологическим процессом, в состав которого входит клапан и электропневматический контроллер (этап 212). Например, беспроводной сигнал положения может быть передан на один или большее количество других контроллеров 78a-78n или на другое устройство 80, например, на хост 116, 118 системы управления системы 100 управления технологическим процессом. В одном из вариантов осуществления беспроводной сигнал положения передают на хост системы управления по ячеистой сети беспроводной связи в соответствии с таблицей, генерируемой диспетчером сети ячеистой сети беспроводной связи.
[000105] Некоторые варианты осуществления способа 200 могут включать только один из этапов 210 и 212, а некоторые варианты осуществления способа 200 могут включать оба этапа 210 и 212.
[000106] В одном из вариантов осуществления способ 200 включает подачу питания на беспроводной датчик или преобразователь положения от источника питания (этап 215). Например, беспроводной преобразователь 32 положения с акселерометром (например, процессор 50 и/или интерфейс 55 связи беспроводного преобразователя 32 положения с акселерометром) может получать питание от источника 38 питания. Как правило, источник питания представляет собой локальный источник питания, который физически расположен вблизи беспроводного преобразователя положения, например, существует непосредственное, локальное проводное соединение с источником питания, аккумуляторную батарею, конденсатор или другой подходящий локальный источник питания, или индуктивный источник питания. В некоторых вариантах осуществления локальный источник питания входит в состав беспроводного преобразователя положения как встроенный блок.
[000107] В некоторых вариантах осуществления источник питания является перезаряжаемым устройством аккумулирования энергии и способ 200 может включать подзарядку перезаряжаемого источника энергии с использованием любого известного способа подзарядки, например, улавливания и преобразования солнечной энергии, замены аккумуляторной батареи, рекуперации энергии локального тепла, вибрации и/или движения, временного подключения к источнику со штепсельным соединением, например, к источнику питания постоянного тока, индукционного с использованием бесконтактного зарядного устройства или любого другого подходящего средства или механизма подзарядки. Например, источник 38 питания можно подзаряжать с помощью устройства 40 для получения энергии датчика 32.
[000108] По меньшей мере некоторые из описанных выше различных этапов, операций и способов могут быть реализованы в аппаратном обеспечении, выполняемых с помощью процессора командах аппаратно реализованного программного обеспечении и/или программного обеспечения или в любой их комбинации. Например, по меньшей мере части беспроводного преобразователя 32 положения с акселерометром могут быть реализованы в аппаратном обеспечении, выполняемых с помощью процессора командах аппаратно реализованного программного обеспечении и/или программного обеспечения или в любой их комбинации. Кроме того, по меньшей мере часть этапов по ФИГ. 6 может быть реализована в аппаратном обеспечении, выполняемых с помощью процессора командах аппаратно реализованного программного обеспечении и/или программного обеспечения или в любой их комбинации.
[000109] При реализации с использованием команд программного или аппаратно реализованного программного обеспечения, выполняемых с помощью процессора, команды программного или аппаратно реализованного программного обеспечения могут хранить на любом энергонезависимом материальном носителе данных, таком как магнитный диск, оптический диск, ОЗУ, ПЗУ или электрически перепрограммируемое постоянное запоминающее устройство, ленточный накопитель и т. д. Команды программного или аппаратно реализованного программного обеспечения могут включать машиночитаемые команды, хранимые на запоминающем устройстве или другом энергонезависимом машиночитаемом носителе данных, которые при выполнении процессором побуждают процессор выполнять различные действия.
[000110] При реализации в аппаратном обеспечении это аппаратное обеспечение может содержать один или большее количество дискретных компонентов, интегральную схему, специализированную интегральную схему (ASIC), программируемое логическое устройство и т. д.
[000111] Кроме того, хотя в предшествующем тексте приведено подробное описание многочисленных различных вариантов осуществления изобретения, следует понимать, что объем настоящего патента определяется текстом формулы изобретения, изложенной в заключительной части этого патента, и ее эквивалентами. Подробное описание следует рассматривать только как иллюстративное, а не такое, которое описывает каждый возможный вариант реализации изобретения, поскольку описание каждого возможного варианта реализации изобретения было бы нецелесообразным или даже невозможным. Многочисленные альтернативные варианты осуществления изобретения могут быть реализованы с применением либо современной технологии, либо технологии, разработанной после даты подачи данного патента, которая однако входит в объем формулы изобретения.
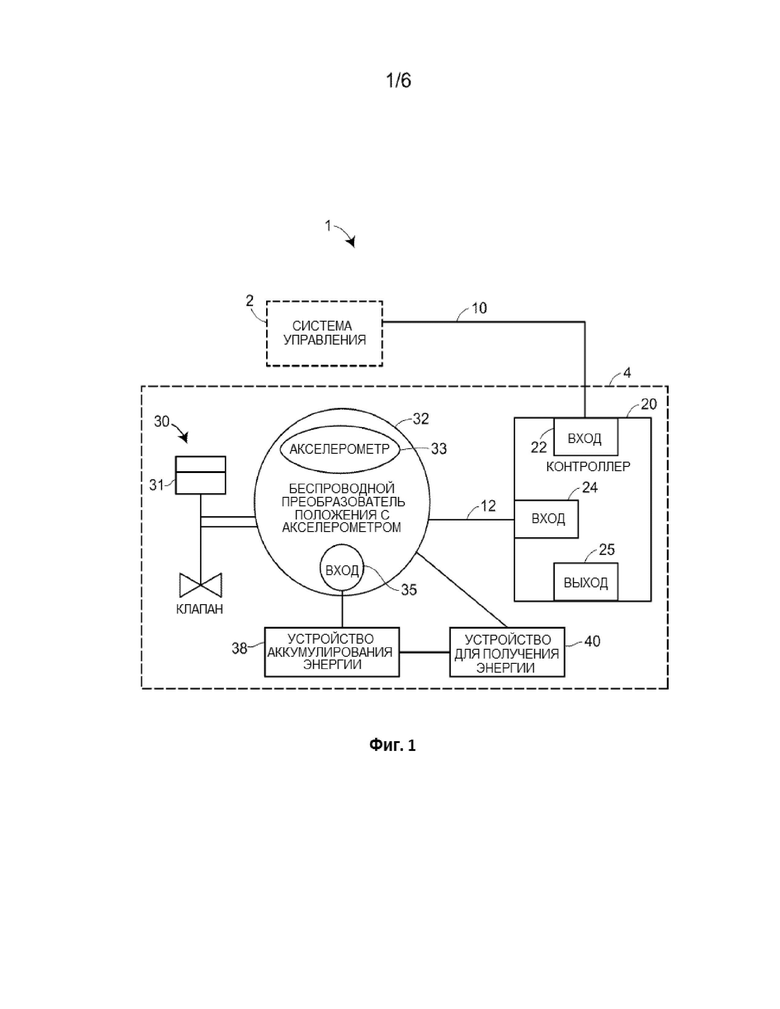
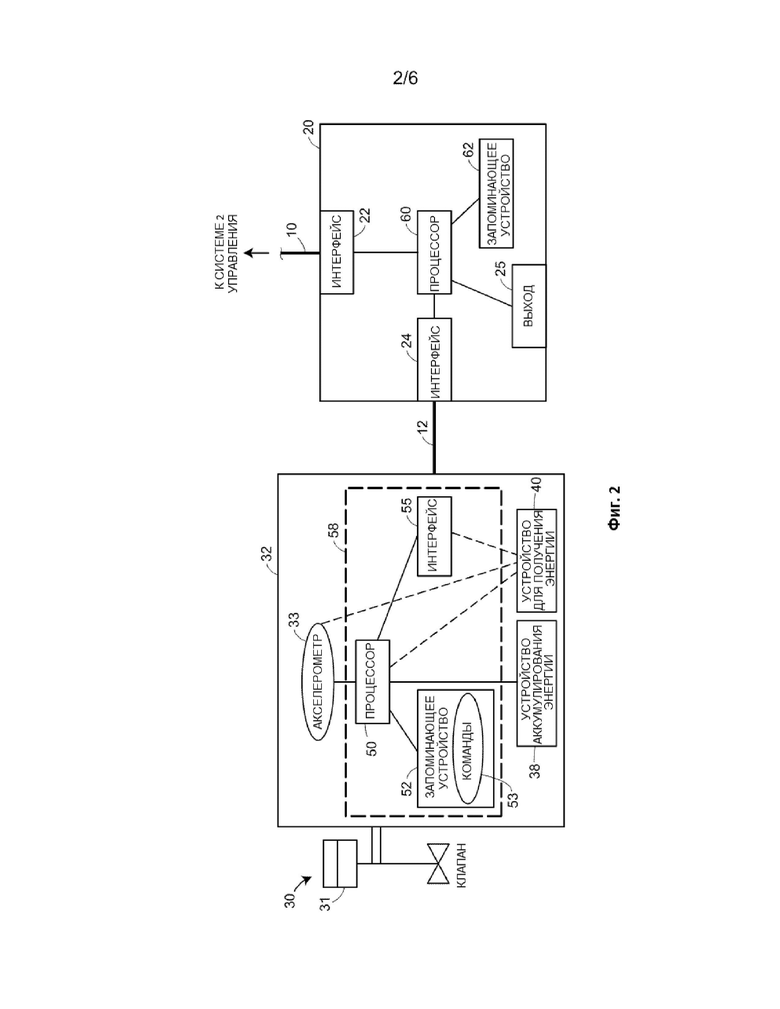
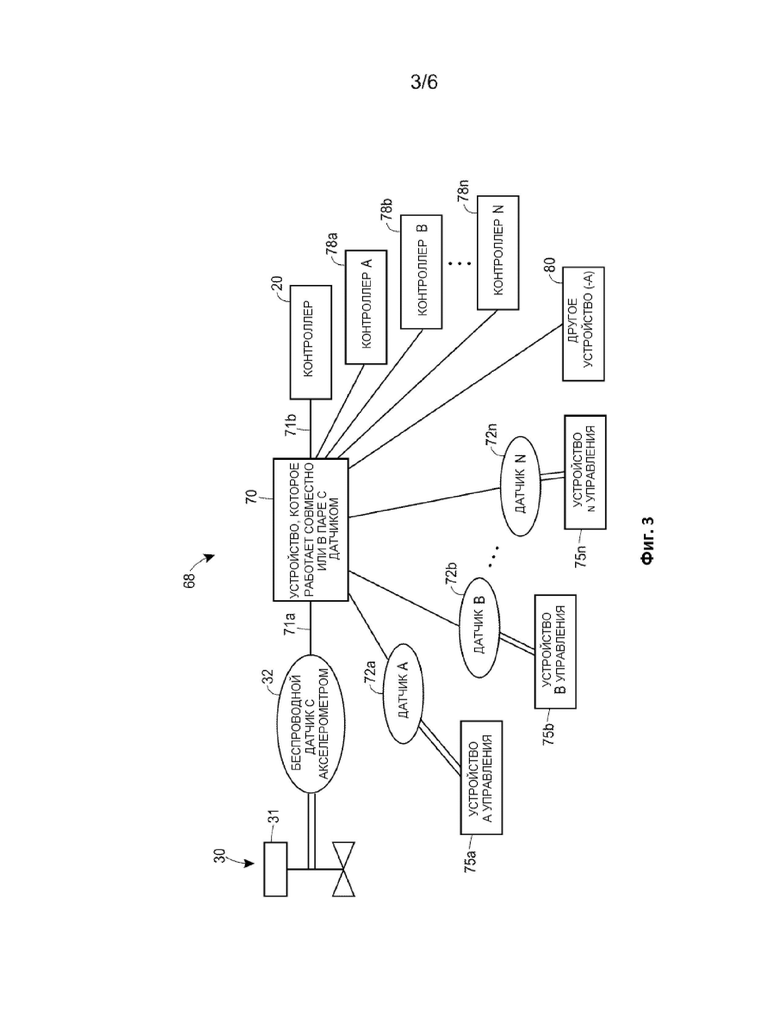
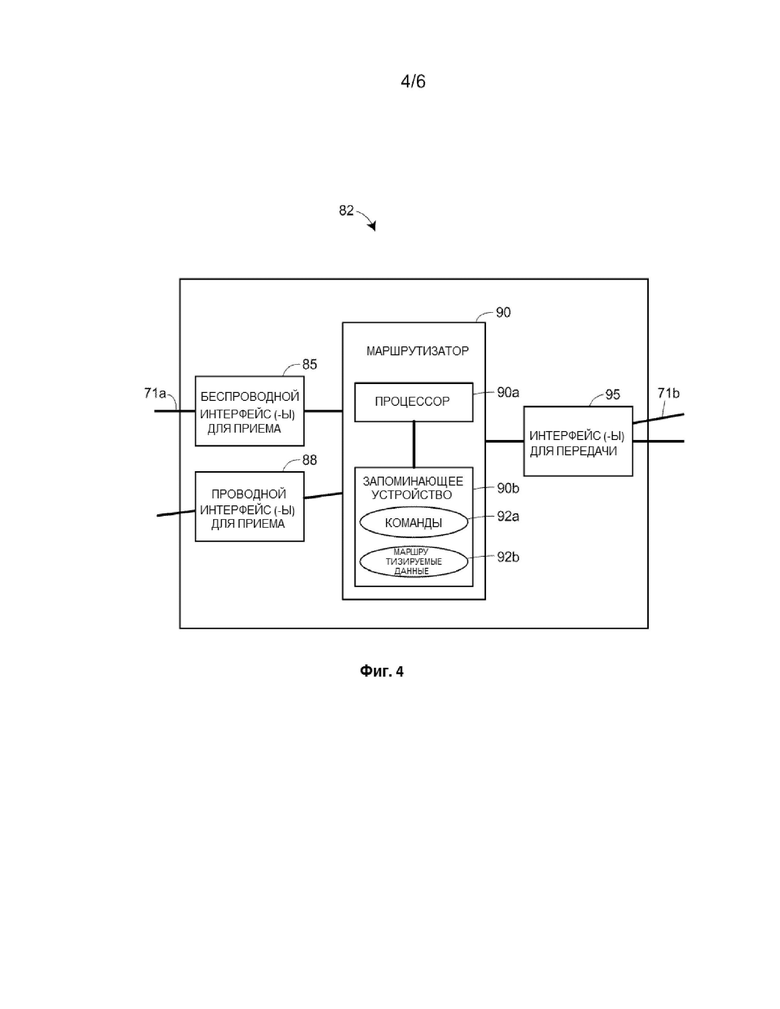
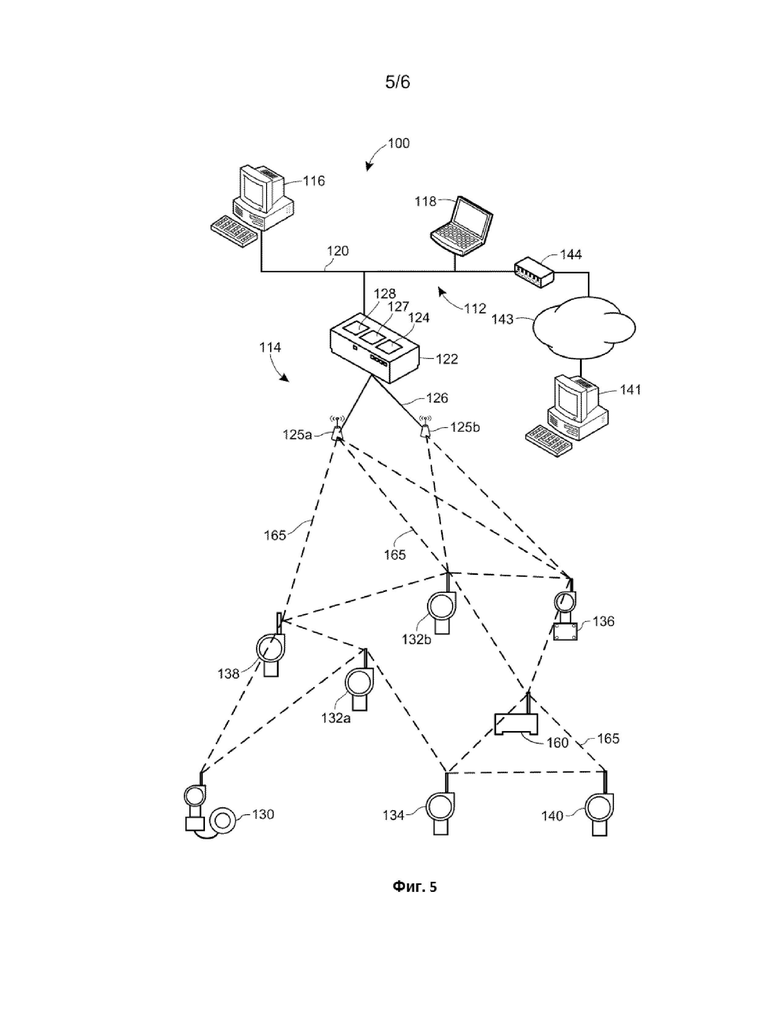
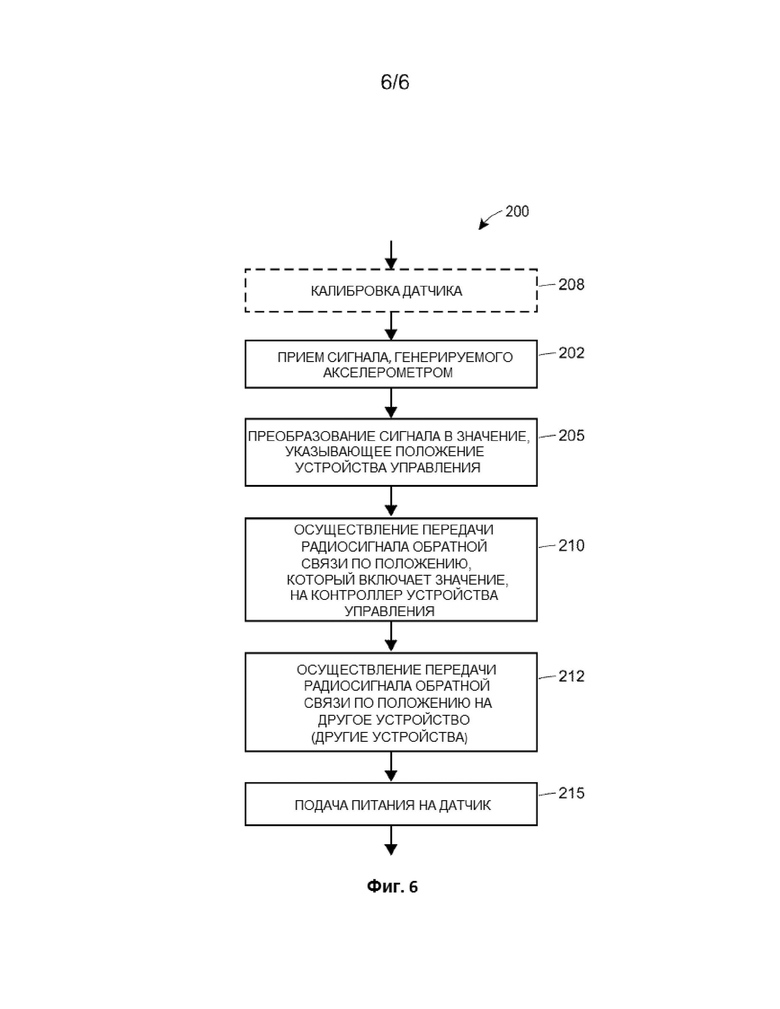
Настоящее изобретение в целом относится к устройствам управления технологическим процессом, таким как клапаны, и, в частности, к способам, системам и устройствам для обеспечения обратной связи по положению устройств управления технологическим процессом в системе управления технологическим процессом. Предложен беспроводной датчик или преобразователь положения с акселерометром, который физически соединен с устройством управления в системе управления технологическим процессом и содержит акселерометр, который генерирует сигнал на основании положения устройства управления или его исполнительного механизма. Преобразователь преобразует сигнал акселерометра в радиосигнал, который включает значение, указывающее положение исполнительного механизма, и осуществляет передачу радиосигнала обратной связи по положению по беспроводному каналу на контроллер клапана, например, с использованием беспроводного протокола ближнего действия. Контроллер управляет клапаном на основании значения, включенного в радиосигнал. В некоторых конфигурациях сигнал обратной связи принимают на устройство, сопряженное с преобразователем, и сопряженное устройство передает сигнал обратной связи на контроллер. Сопряженное устройство может быть сопряжено с множеством преобразователей и/или датчиков и может передавать различные сигналы обратной связи на множество принимающих контроллеров и других устройств. 3 н. и 16 з.п. ф-лы, 6 ил.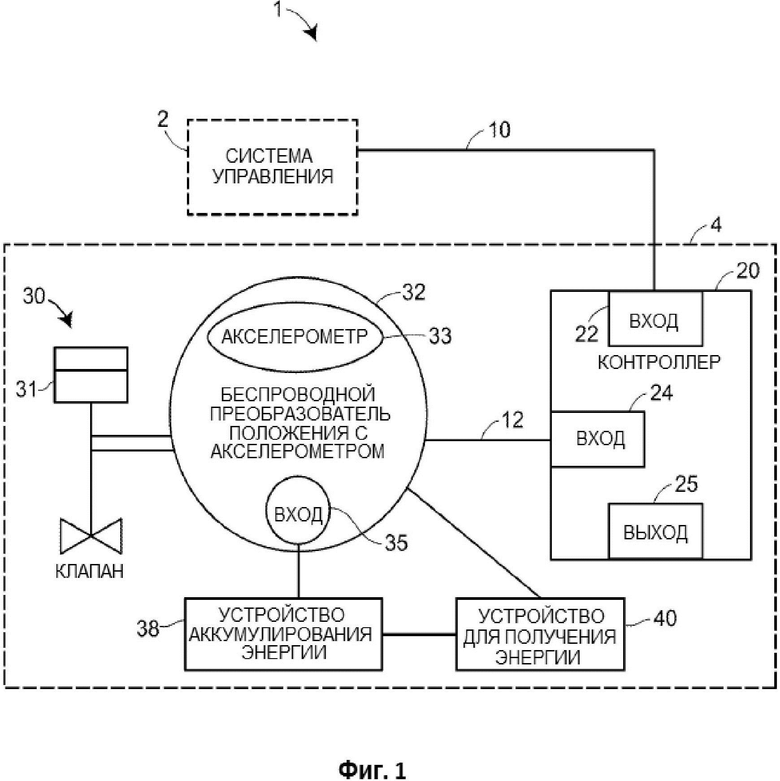
1. Датчик положения для обеспечения обратной связи по положению для использования в системе управления технологическим процессом, содержащий:
акселерометр, физически соединенный с устройством управления, используемым при управлении технологическим процессом, осуществляемым в системе управления технологическим процессом;
процессор для преобразования сигнала, генерируемого акселерометром, в сигнал, который включает значение, указывающее положение исполнительного механизма, соединенного с устройством управления;
интерфейс связи для передачи беспроводного сигнала, указывающего положение исполнительного механизма, причем интерфейс связи соединен с каналом беспроводной связи, образующим выделенное соединение между датчиком положения и устройством обратной связи, сопряженным с датчиком положения, а устройство обратной связи соединено с возможностью осуществления связи с контроллером устройства управления; и
источник питания для подачи питания на процессор и интерфейс связи.
2. Датчик положения по п. 1, в котором беспроводной сигнал передают на по меньшей мере одно из контроллера устройства управления или хоста системы управления системы управления технологическим процессом.
3. Датчик положения по п. 1, в котором источник питания является перезаряжаемым.
4. Датчик положения по п. 3, дополнительно содержащий устройство для получения энергии, причем это устройство для получения энергии позволяет получать энергию, генерируемую одной или большим количеством частей датчика положения, для подзарядки источника питания.
5. Датчик положения по п. 1, в котором процессор выполнен с возможностью преобразования сигнала, генерируемого акселерометром, с использованием значения, указывающего калиброванное положение датчика положения.
6. Датчик положения по п. 1, в котором беспроводной сигнал соответствует протоколу WirelessHART® или протоколу ZigBee®.
7. Датчик положения по п. 1, в котором устройство управления представляет собой клапан.
8. Способ, выполняемый датчиком для обеспечения обратной связи по положению устройства управления, согласно которому:
принимают на процессоре датчика сигнал, генерируемый акселерометром, физически соединенным с исполнительным механизмом устройства управления, используемым при управлении технологическим процессом, осуществляемым в системе управления технологическим процессом;
преобразуют на процессоре значение сигнала, генерируемого акселерометром, в значение, указывающее положение исполнительного механизма; и
осуществляют беспроводную передачу сигнала от датчика через интерфейс связи для использования контроллером, который управляет устройством управления на основании положения исполнительного механизма, причем интерфейс связи соединен с каналом беспроводной связи, образующим выделенное соединение между датчиком и устройством обратной связи, сопряженным с датчиком, а устройство обратной связи соединено с возможностью осуществления связи с контроллером.
9. Способ по п. 8, который дополнительно включает подачу питания на датчик с использованием устройства аккумулирования энергии, входящего в состав или расположенного вблизи датчика.
10. Способ по п. 9, который дополнительно включает подзарядку устройства аккумулирования энергии с использованием по меньшей мере одного из: солнечной энергии, временного подключения устройства аккумулирования энергии к источнику энергии, рекуперированной энергии локальной вибрации или движения или индукции бесконтактного зарядного устройства.
11. Способ по п. 8, согласно которому осуществление беспроводной передачи сигнала от датчика включает осуществление беспроводной передачи сигнала с использованием протокола беспроводной связи HART или беспроводного протокола ближнего действия.
12. Способ по п. 8, который дополнительно включает калибровку датчика в начальном положении исполнительного механизма, причем преобразование значения сигнала, генерируемого акселерометром, включает преобразование значения сигнала, генерируемого акселерометром, на основании начального положения исполнительного механизма.
13. Устройство обратной связи для обеспечения обратной связи по положению в системе управления технологическим процессом, содержащее:
первый интерфейс связи для приема беспроводного сигнала, указывающего положение исполнительного механизма, физически соединенного с устройством управления, используемым при управлении технологическим процессом, осуществляемым в системе управления технологическим процессом, причем беспроводной сигнал генерируют с помощью акселерометра, входящего в состав датчика, который сопряжен с устройством обратной связи и который прикреплен к устройству управления; и
генератор сигнала для генерации и передачи сигнала обратной связи по положению через первый интерфейс связи или второй интерфейс связи на по меньшей мере одно из контроллера устройства управления или хоста системы управления системы управления технологическим процессом, причем сигнал обратной связи по положению основан на принятом беспроводном сигнале.
14. Устройство обратной связи по п. 13, в котором принимаемый беспроводной сигнал представляет собой первый беспроводной сигнал, а сигнал обратной связи по положению представляет собой второй беспроводной сигнал.
15. Устройство обратной связи по п. 13, в котором устройство обратной связи сопряжено с множеством устройств, причем это множество устройств включают в себя датчики.
16. Устройство обратной связи по п. 15, в котором:
беспроводной сигнал представляет собой первый беспроводной сигнал, датчик представляет собой первый датчик множества устройств, исполнительный механизм представляет собой первый исполнительный механизм, устройство управления представляет собой первое устройство управления, а сигнал обратной связи по положению представляет собой первый сигнал обратной связи по положению;
устройство обратной связи сопряжено со вторым датчиком указанного множества устройств для приема второго беспроводного сигнала, причем второй датчик выполнен с возможностью генерирования второго беспроводного сигнала, который указывает положение второго исполнительного механизма, соединенного со вторым устройством управления; и
генератор сигналов выполнен с возможностью генерирования и передачи второго сигнала обратной связи по положению на контроллер второго устройства управления или на хост системы управления, причем второй сигнал обратной связи по положению основан на принимаемом втором беспроводном сигнале.
17. Устройство обратной связи по п. 13, в котором устройство управления представляет собой клапан.
18. Устройство обратной связи по п. 13, в котором акселерометр выполнен с возможностью генерирования выходного сигнала, причем значение принимаемого беспроводного сигнала основано на выходном сигнале, генерируемом акселерометром.
19. Устройство обратной связи по п. 13, в котором:
беспроводной сигнал соответствует первому беспроводному протоколу ближнего действия; а
сигнал обратной связи по положению соответствует первому беспроводному протоколу ближнего действия, второму беспроводному протоколу ближнего действия или беспроводному протоколу HART.
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| АКСЕЛЕРОМЕТР | 1982 |
|
SU1090131A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Пломбировальные щипцы | 1923 |
|
SU2006A1 |

