Изобретение относится к области радиоволновой техники, в частности к способам для охранной сигнализации и к способам контроля за перемещением объектов.
Существуют радиоволновые способы обнаружения перемещающихся объектов, основанные на регистрации изменений электромагнитного поля при пересечении объектом объемной зоны обнаружения, формируемой между излучающей и приемной линиями вытекающей волны, проложенными параллельно друг другу.
Известны радиоволновые способы обнаружения перемещающихся объектов, основанные на регистрации изменений электромагнитного поля при пересечении объектом объемной зоны обнаружения, формируемой между излучающей и приемной линиями (кабелями) вытекающей волны, проложенными параллельно друг другу, которые реализованы в радиоволновых средствах обнаружения MicroTrack II [1] и TREZOR-R [2].
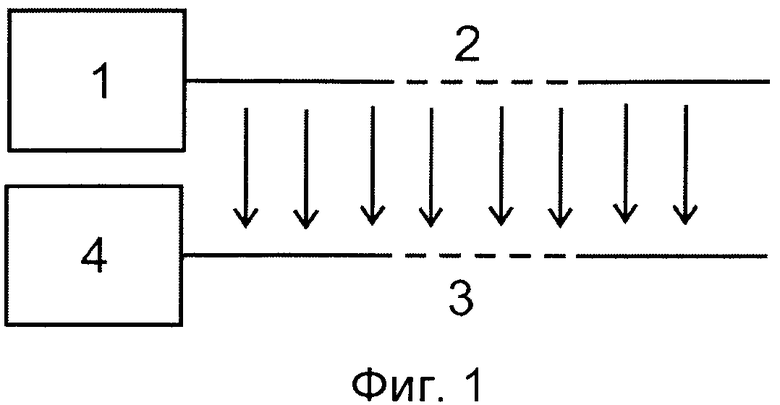
Способ обнаружения объектов [1], основанный на обработке широкополосного кодированного радиочастотного сигнала, реализован в средстве обнаружения MicroTrack II. Зона обнаружения формируется вдоль двух параллельных кабелей вытекающей волны, закрепляемых на заграждении или закопанных в грунт, которые выступают в качестве антенн. Передатчик 1 (см. фиг.1) по излучающему кабелю 2 посылает широкополосный кодированный радиочастотный сигнал, который по приемному кабелю 3 передается в приемник 4. Вокруг излучающего 2 и приемного 3 кабелей возникает электромагнитное поле, которое формируется как над поверхностью земли, так и под ней, вдоль всей длины пары параллельных кабелей. В данной системе вся длина зоны обнаружения на программном уровне разбивается на отдельные участки, на которых устанавливаются «собственные» опорные уровни, что позволяет адаптироваться к неоднородностям рубежа охраны и обеспечить достаточно хорошие показатели по обнаружению и периоду наработки на ложные тревоги.
Недостатком данного способа является большая разница в амплитуде и спектре сигналов на ближних (к приемнику и передатчику) и дальних (от приемника и передатчика) участках. Это связано с принципиальной необходимостью размещения передающих и приемных модулей в одном конструктиве (на одной стороне кабельной системы). Большое затухание радиочастотного сигнала на дальних участках кабельной системы приводит к ограничению длины охраняемого рубежа (не более 200 м), контролируемого одной кабельной системой (излучающей и приемной линиями), и к снижению помехоустойчивости или вероятности обнаружения в конце линии.
Наиболее близким к предлагаемому является способ обнаружения [2] перемещающихся объектов, используемый в радиоволновом средстве обнаружения серии TREZOR-R. В данном способе преодолен недостаток способа, реализованного в MicroTrack II, за счет подключения передатчика и приемника на противоположных концах кабельной системы.
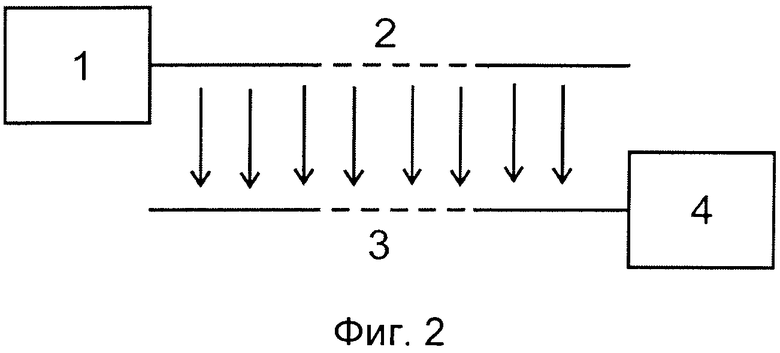
Зона обнаружения средства формируется между двумя закрепленными на заграждении или закопанными в грунт параллельными кабелями вытекающей волны, которые выступают в качестве антенн. Передатчик 1 (фиг.2) вырабатывает высокочастотный сигнал, который излучается кабелем 2 и принимается кабелем 3, создавая вокруг определенное распределение электромагнитного поля. С приемного кабеля 3 сигнал поступает в приемник 4, где преобразуется в опорный сигнал. При попадании нарушителя в зону обнаружения меняется распределение поля, а с ним и радиочастотный сигнал на входе приемника 4. Это изменение относительно опорного сигнала фиксируется и после соответствующей обработки принимается решение о выдаче сигнала тревоги.
Однако данный способ не позволяет разделить единую по всей длине кабелей 2 и 3 зону обнаружения на отдельные участки и использует только один усредненный по всей длине кабелей 2 и 3 опорный уровень сигнала, что не дает возможности произвести раздельную настройку чувствительности на участках рубежа с разными условиями распространения радиоволн и определить место нарушения на охраняемом рубеже. К тому же, при увеличении длины рубежа снижается отношение амплитуды сигнала, вызванного объектом обнаружения, к опорному и шумовому сигналам, что ограничивает длину рубежа, контролируемого одной кабельной системой, а любые неоднородности на рубеже охраны приводят к неравномерности по чувствительности. Например, чтобы поддерживать требуемую вероятность обнаружения на участке с большим затуханием радиочастотного сигнала, необходимо устанавливать более высокую чувствительность приемника 4, которая будет излишне высокой для участков с малым затуханием радиочастотного сигнала и приведет к значительному снижению периода ложных тревог. А чтобы поддерживать высоким период ложных тревог, придется снижать чувствительность приемника 4, которая будет недостаточной для участков с большим затуханием радиочастотного сигнала, что приведет к значительному снижению вероятности обнаружения.
Основными недостатками данного способа являются невозможность раздельного регулирования чувствительности на отдельных участках кабельной системы, ограничение длины охраняемого рубежа (не более 200 м), контролируемого одной кабельной системой, и невозможность указания места нарушения на охраняемом рубеже. Для обеспечения более равномерной чувствительности вдоль рубежа охраны необходимо добиться практически абсолютной однородности среды, окружающей кабели вытекающей волны на всем протяжении прокладки, т.к. в данном способе не имеется возможности выровнять чувствительность на участках с разнородными средами. Причинами разнородности могут быть неравномерность выпадения осадков, образование луж, не выявленные неоднородности в грунте и т.п.
Целью предлагаемого изобретения является увеличение длины рубежа контролируемого одной кабельной системой (излучающей и приемной линиями вытекающей волны), обеспечение раздельного регулирования чувствительности на отдельных участках кабельной системы и точное определение места нарушения.
Данный технический результат достигается благодаря тому, что на противоположных концах излучающей линии вытекающей волны формируют сигналы с изменяемой во времени частотой, а на приемной линии вытекающей волны выделяют огибающие суммарных радиосигналов и пропускают их через полосовые фильтры, соотнося каждой выделенной полосе частот определенный участок приемной линии вытекающей волны. Для каждого участка устанавливают свой опорный уровень сигнала и чувствительность.
Фиг.1-13 иллюстрируют предлагаемый способ.
На фиг.1 изображена укрупненная структурная схема устройства MicroTrack II.
На фиг.2 изображена укрупненная структурная схема устройства-прототипа.
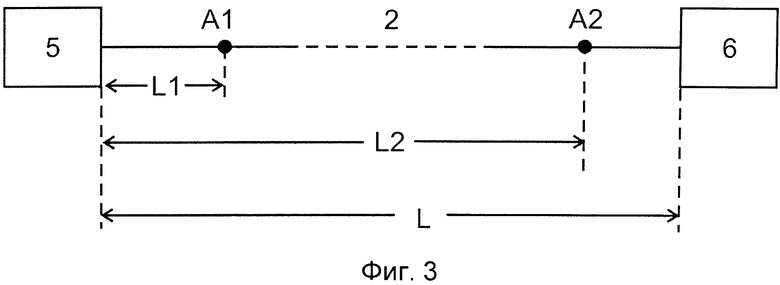
На фиг.3 изображена структура излучающей линии с условными точками наблюдения радиочастотных сигналов.
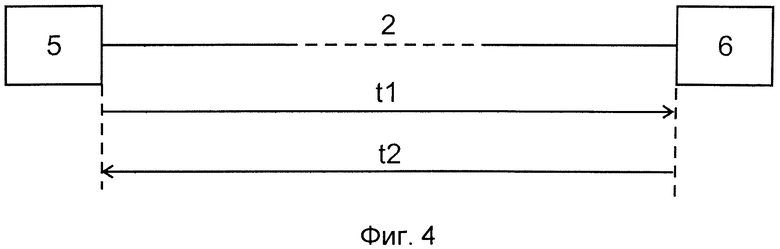
На фиг.4 изображены времена прохождения сигналов по излучающей линии.
На фиг.5 изображена укрупненная структурная схема с точкой наблюдения.
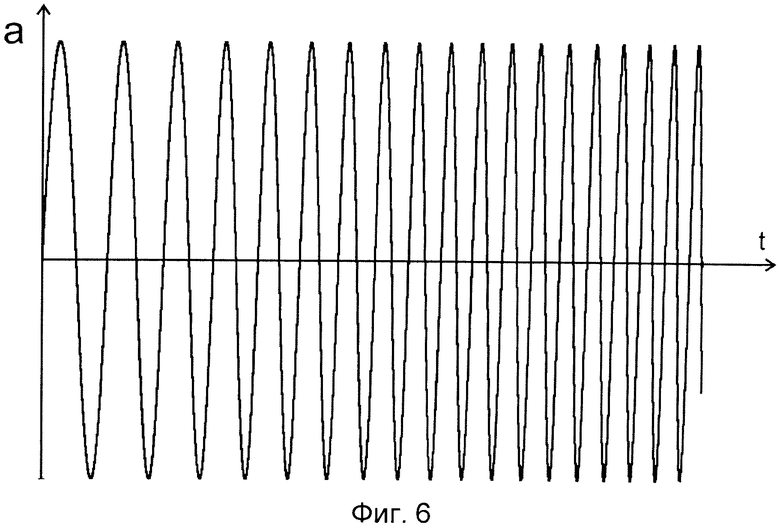
На фиг.6 изображен радиочастотный сигнал с линейной частотной модуляцией (в дальнейшем ЛЧМ).
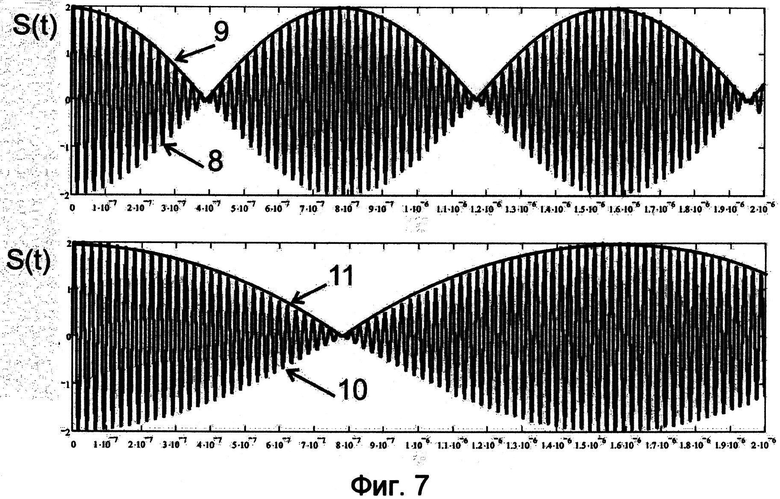
На фиг.7 изображены результаты сложения сигналов в точках наблюдения.
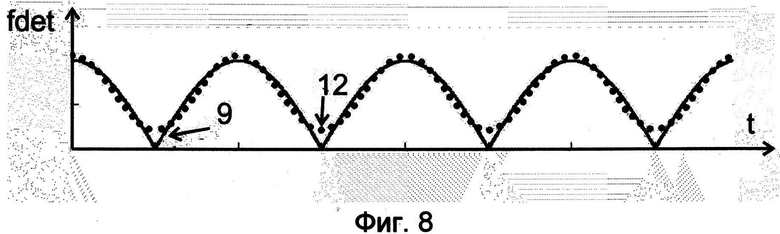
На фиг.8 изображены огибающая и первая гармоника сигнала.
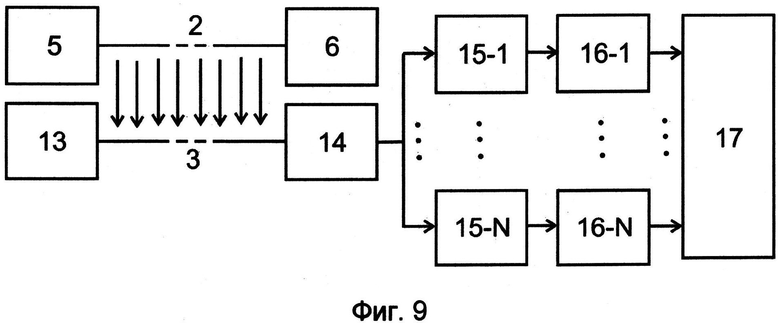
На фиг.9 изображена функциональная схема устройства, реализующего предлагаемый способ.
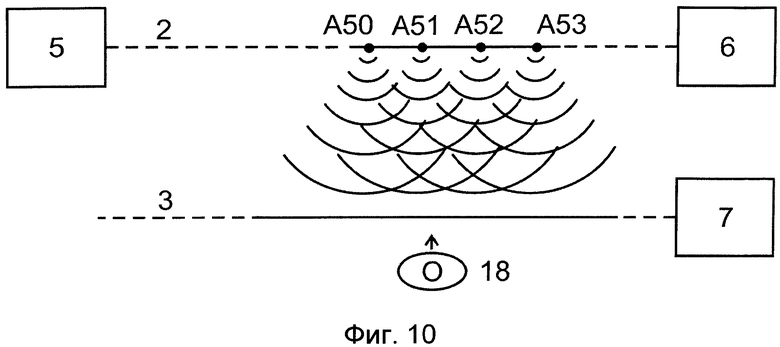
На фиг.10 отображено воздействие объекта обнаружения на перекрывающиеся электромагнитные поля.
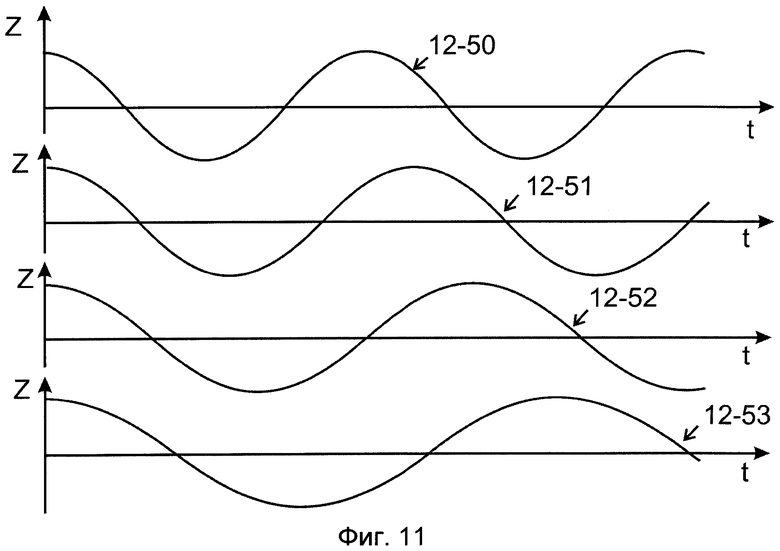
На фиг.11 изображены огибающие сигналов.
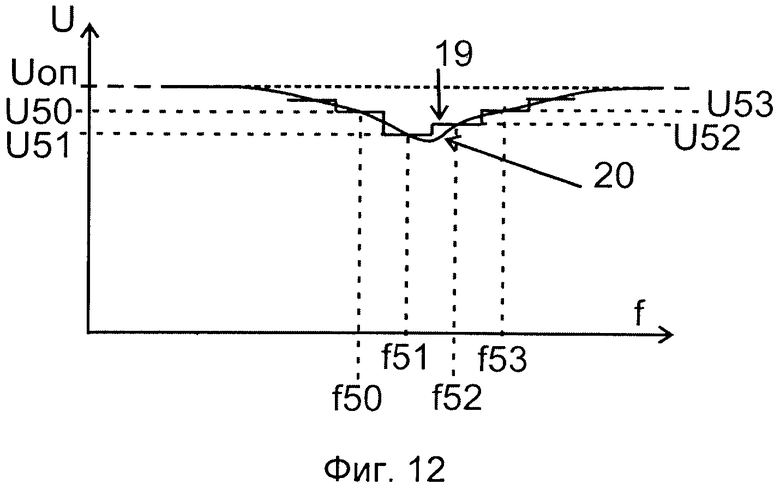
На фиг.12 изображены изменения уровней сигналов в частотных диапазонах полосовых фильтров.
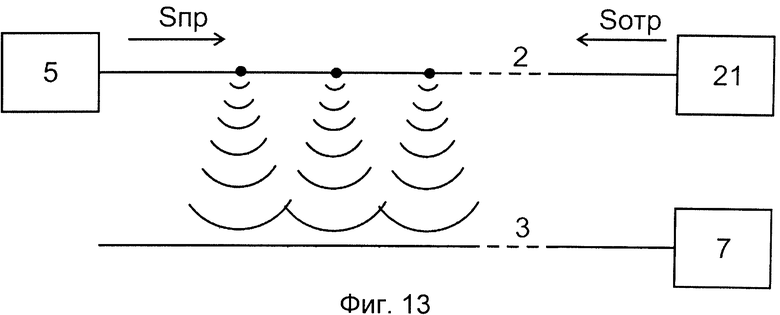
На фиг.13 показана укрупненная функциональная схема устройства, реализующего вариант предлагаемого способа.
На обоих концах излучающей линии длиной L с помощью высокочастотных генераторов 5 и 6 (см. Фиг.3) формируются высокочастотные радиоимпульсы с ЛЧМ. Управление включением генератора 6 осуществляется от генератора 5 и производится, например, по излучающей или приемной линии, поэтому включение генератора 6 относительно генератора 5 происходит с запаздыванием, определяемым временем распространения сигнала в излучающей или приемной линии. Для описания излучаемых радиосигналов используются две условные точки наблюдения A1 и A2 на излучающей линии, находящиеся на расстоянии L1 и L2 соответственно.
На фиг.3 показаны точки наблюдения радиочастотных сигналов на излучающей линии.
На фиг.3 обозначено:
2 - излучающая линия (кабель) вытекающей волны;
3 - приемная линия (кабель) вытекающей волны;
5 и 6 - высокочастотные генераторы с ЛЧМ;
A1 и A2 - точки наблюдения на излучающей линии;
L - длина излучающей линии;
L1 - расстояние от генератора 5 до точки наблюдения A1;
L2 - расстояние от генератора 5 до точки наблюдения A2.
На фиг.4 графически показаны времена прохождения сигналов от генератора 5 (начало линии) до генератора 6 (конец линии) и обратно, т.е. запаздывание радиочастотного сигнала генератора 6 относительно радиочастотного сигнала генератора 5 в начале линии.
Из фиг.4 видно, что время t1 прохождения управляющего сигнала и радиочастотного сигнала от начала до конца излучающей линии длиной L со скоростью C распространения сигнала в излучающей линии и время t2 прохождения радиочастотного сигнала из конца в начало излучающей линии определяются выражением
Время t3 запаздывания радиочастотного сигнала генератора 6 относительно радиочастотного сигнала генератора 5 в начале линии
На фиг.5 изображена укрупненная структурная схема с точкой наблюдения A1 и графически показано расстояние от точки A1 до конца линии, определяющее время запаздывания радиочастотного сигнала генератора 6 относительно радиочастотного сигнала генератора 5 в точке наблюдения A1.
На фиг.5 обозначено:
2 - излучающая линия (кабель) вытекающей волны;
3 - приемная линия (кабель) вытекающей волны;
5 и 6 - высокочастотные генераторы с ЛЧМ;
A1 - точка наблюдения на излучающей линии;
(L-L1) - расстояние от точки A1 до конца излучающей линии;
7 - приемный блок.
Из фиг.5 следует, что запаздывание τ1 радиочастотного сигнала генератора 6 относительно радиочастотного сигнала генератора 6 в точке A1 определяется удвоенным временем прохождения сигналом отрезка излучающего кабеля длиной (L-L1), т.е. выражением
Аналогично определяется запаздывание τ2 для точки A2, см. фиг.3
На фиг.6 изображен радиочастотный сигнал a(t) с линейной частотной модуляцией.
На фиг.6 обозначено:
а - амплитуда радиочастотного сигнала;
t - время.
Изменение частоты f(t) внутри радиочастотного сигнала с ЛЧМ происходит по линейному закону:
f(t)=f0+b·t, 
где
f0=(Fmax+Fmin)/2 - центральное значение несущей частоты;
b=(Fmax+Fmin)/Тс;
Тс - длительность радиоимпульсов;
Fmax, Fmin - максимальное и минимальное значения частоты радиочастотного сигнала в радиоимпульсах.
Фаза радиочастотного сигнала с ЛЧМ определяется как
Радиочастотный сигнал с ЛЧМ описывается выражением
SLFM(t)=S0cos{φ0+φ(t)},
где
φ0 - начальная фаза радиочастотного сигнала с ЛЧМ;
S0 - амплитуда сигнала с ЛЧМ.
На излучающей линии радиочастотные сигналы от генераторов 5 и 6 суммируются.
Суммарный сигнал на излучающей линии описывается выражением
S(t)=S01cos{φ01+φ1(t)}+S02cos{φ02+φ2(t)},
где
S01 - амплитуда сигнала от генератора 5;
S02 - амплитуда сигнала от генератора 6;
φ01 - начальная фаза сигнала от генератора 5;
φ02 - начальная фаза сигнала от генератора 6;
φ01 - фаза сигнала от генератора 5;
φ02 - фаза сигнала от генератора 6.
На конце приемной линии суммарный сигнал детектируется с помощью детектора огибающей.
Огибающая суммарного сигнала после детектирования определяется как
где
S(t) - суммарный сигнал на излучающей линии;


Суммарный сигнал от генератора 5 и от генератора 6 в точке A1
S1(t)=S01cos{φ01+φ(t+t1)}+S02cos{φ02+φ(t+t1+τ1)}.
Аналогично для точки A2
S2(t)=S01cos{φ01+φ(t+t2)}+S02cos{φ02+φ(t+t2+τ2)},
где


τ1 - запаздывание радиочастотного сигнала от генератора 6 относительно радиочастотного сигнала от генератора 5 в точке A1;
τ2 - запаздывание радиочастотного сигнала от генератора 6 относительно радиочастотного сигнала от генератора 5 в точке A2.
Для удобства описания, высокочастотные генераторы считаются идентичными, начальная фаза радиочастотного сигнала от генератора 5 в точке наблюдения считается равной нулю, потери в излучающей и приемной линиях, а также времена задержки включения генераторов в расчетах не учитываются.
С учетом вышесказанного, суммарный сигнал генератора 5 и генератора 6 в точке A1
S1(t)=S0cos{φ(t)}+S0cos{φ(t+τ1)},
Аналогично для точки A2
S2(t)=S0cos{φ(t)}+S0cos{φ(t+τ2)},
На фиг.7 приведены сигнал 8, полученный в результате сложения сигналов генератора 5 и генератора 6 в точке A1 излучающей линии, и модуль его огибающей 9 и сигнал 10 полученный в результате сложения сигналов генератора 5 и генератора 6 в точке A2 излучающей линии и модуль его огибающей 11.
Модуль огибающей fdet(t) суммарного сигнала генератора 5 и генератора 6 в точке наблюдения можно представить в виде ряда Фурье

где:
n - номер гармоники Фурье-преобразования;
T - период огибающей сигнала.
На фиг.8 показаны модуль огибающей сигнала 9 и первая гармоника Фурье-преобразования 12.
Из фиг.3, фиг.7 и фиг.8 следует, что при перемещении точки наблюдения от начала A1 к концу A2 излучающей линии частота первой гармоники модуля огибающей суммарного высокочастотного радиосигнала уменьшается. Т.е. каждой точке наблюдения на линии соответствует определенная частота первой гармоники модуля огибающей сигнала. Определяя полосы частот, можно выделить сигналы, соответствующие определенным участкам линии. Так как излучающая и приемная линии располагаются параллельно, между ними образуется электромагнитное поле, определяемое параметрами контролируемого участка и самих линий вытекающей волны.
Для проверки теоретических результатов был проведен натурный эксперимент. Был изготовлен образец устройства, реализующий предлагаемый способ.
На фиг.9 показана функциональная схема варианта устройства, реализующего предлагаемый способ.
На фиг.9 обозначено: 2 - излучающая линия (кабель) вытекающей волны; 3 - приемная линия (кабель) вытекающей волны; 5, 6 - высокочастотные генераторы с ЛЧМ; 13 - согласующее устройство; 14 - детектор огибающей высокочастотного радиосигнала; 15-1…15-N - полосовые фильтры (1…N); 16-1…16-N - блоки регулировки усиления или чувствительности; 17 - блок обработки и отображения информации.
Излучающий и приемный кабели длиной по 300 м были размещены в грунте параллельно на расстоянии 2…2,5 м друг от друга, на глубине 0,15…0,2 м. Генераторы 5 и 6, подключенные к излучающему кабелю 2, согласующее устройство 13 и детектор огибающей 14, подключенные к приемному кабелю 3, имеют сопротивление, равное волновому сопротивлению кабелей. Частота генераторов 5 и 6 с ЛЧМ изменялась под управлением пилообразного напряжения, включение генератора 6 производилось по излучающему кабелю 2 вытекающей волны. Полосовые фильтры 15-1…15-N, блоки 16-1…16-N регулировки усиления или чувствительности, блок 17 обработки и отображения информации были реализованы программным способом. Неоднородность среды имитировалась с помощью металлических предметов, укладываемых в контролируемой зоне, и создания водных луж, перекрывающих излучающий 2 и приемный 3 кабели.
Целью эксперимента являлось подтверждение возможностей разбиения контролируемого рубежа на отдельные участки, раздельной регулировки чувствительности по каждому участку и идентификации места нарушения рубежа с точностью до участка разбиения. Сформированное электромагнитное поле является зоной обнаружения устройства, реализующего предлагаемый способ. Высокочастотные радиосигналы с приемной линии 3 (см. фиг.9) поступают на детектор огибающей 14 и далее на полосовые фильтры 15-1…15-N. Количество N и граничные частоты полосовых фильтров определяются количеством участков условного разбиения приемной линии и требуемой точностью идентификации участков охраняемого рубежа. С выходов полосовых фильтров 15-1…15-N сигналы, соответствующие 1…N условным участкам, нормируются в блоках 16-1…16-N регулировки усиления или чувствительности. Нормирование сигналов может производиться любыми известными способами. Например, сигналы приводятся к одному опорному уровню Uоп постоянной времени автоматического регулирования или пороговые значения, которые используются в дальнейшей обработке, устанавливаются в зависимости от амплитуд сигналов. Постоянная времени автоматического регулирования как минимум вдвое превосходит время изменения сигналов, полученное при минимальной скорости движения объекта обнаружения 18. Дальнейшая обработка производится в блоке 17 обработки и отображения информации.
Весь контролируемый рубеж был условно разбит на 128 участков, каждый протяженностью ~2,3 м. Каждому участку сопоставлено по одной условной точке наблюдения, соответственно, точек наблюдения тоже 128 (А1…А128).
На фиг.10 показано пересечение рубежа охраны объектом обнаружения 18 по траектории, проходящей между точками наблюдения А51 и А52.
На фиг.10 обозначено: 2 - излучающая линия (кабель) вытекающей волны; 3 - приемная линия (кабель) вытекающей волны; 5, 6 - высокочастотные генераторы с ЛЧМ; 7 - приемный блок; A50, A51, А52 и А53 - точки наблюдения, соответствующие участкам 50, 51, 52 и 53; 18 - объект обнаружения.
Под объектом обнаружения 18 подразумевается человек, пересекающий контролируемый рубеж по траектории, перпендикулярной кабелям вытекающей волны. Оценивались амплитуды первых гармоник Z(t) модулей огибающих сигналов (12-50…12-53, см. фиг.11) с выходов блоков 16-50…16-53 регулировки усиления или чувствительности (см. фиг.9), которые соответствовали четырем соседним точкам наблюдения (А50…А53, см. фиг.10), выбранным алгоритмом обработки по максимальным отклонениям амплитуд от опорного уровня при пересечении рубежа охраны объектом обнаружения 18 (см. фиг.10).
На фиг.12 изображены мгновенные (текущие) изменения уровней сигналов в частотных диапазонах на выходах программных блоков регулировки усиления или чувствительности.
На фиг.12 обозначено: Uоп - опорное напряжение автоматического регулирования значения амплитуды сигнала; U50, U51, U52, U53 - мгновенные изменения уровней сигналов на выходах программных блоков регулировки усиления; f50, f51, f52, f53 - частотные диапазоны соответствующих точек наблюдения; 19 - условная ломаная кривая мгновенных изменений уровней сигналов; 20 - аппроксимирующая кривая.
Изображенная на фиг.12 ломаная кривая 19 показывает мгновенные (текущие) изменения уровней U50…U53 сигналов в частотных диапазонах f50…f53 на выходах программных блоков 16-50…16-53 регулировки усиления или чувствительности (см. фиг.9), соответствующих отображениям четырех соседних точек наблюдения А50…А53 (см. фиг.10) при обнаружении объекта 18 и определении места нарушения рубежа охраны. Минимум аппроксимирующей кривой 20 (см. фиг.12) указывает на определенное значение внутри частотных диапазонов (f51…f52) и, соответственно, на точное место (между точками наблюдения А51 и А52, см. фиг.10) нарушения рубежа охраны, т.к. каждой точке наблюдения на линии соответствует определенная частота первой гармоники модуля огибающей сигнала.
Проведенные натурные исследования подтвердили технический результат предлагаемого способа. На выходах полосовых фильтров 15-1…15-N были выделены сигналы, соответствующие отдельным участкам рубежа. Амплитуда сигнала на участке с неоднородностью в виде лужи и металлических предметов в несколько раз отличалась от амплитуд сигналов, соответствовавших свободным от неоднородностей участкам рубежа. На выходах программных блоков 16-1…16-N регулировки усиления или чувствительности участков с помощью системы автоматического регулирования применялось раздельное усиление (регулировка амплитуд) сигналов, приведение их к одному опорному уровню и выравнивание чувствительности на участках с разными условиями распространения электромагнитного поля. Точность определения места нарушения зависит от количества и ширины полос пропускания полосовых фильтров (количества отдельных участков), а также от алгоритма обработки сигналов. Значительное повышение помехоустойчивости достигается в том числе за счет усиления сигналов за полосовыми фильтрами 15-1…15-N, т.е. не несущей, а промежуточных частот. Поэтому радиопомехи не попадают в блок 17 обработки и отображения информации.
Таким образом, теоретические и экспериментальные исследования показали, что при реализации предлагаемого способа возможны:
1) разбиение рубежа охраны на отдельные участки с помощью простой фильтрации и раздельная регулировка чувствительности по каждому участку;
2) увеличение длины рубежа, контролируемого одной кабельной системой (излучающей и приемной линиями);
3) точное определение места нарушения рубежа охраны.
Предлагается еще один вариант данного способа.
На фиг.13 показана укрупненная функциональная схема устройства, реализующего данный вариант способа.
На фиг.13 обозначено: 2 - излучающая линия (кабель) вытекающей волны; 3 - приемная линия (кабель) вытекающей волны; 5 - высокочастотный генератор с ЛЧМ; 7 - приемный блок; 21 - отражающее устройство.
Данный вариант отличается от описанного выше (см. фиг.5) тем, что вместо генератора 6 используется отражающее устройство 21 (см. фиг.13), в качестве которого можно применить простое рассогласование волнового сопротивления на конце излучающей линии вытекающей волны 2.
Генератор 5 с ЛЧМ подключается только на одном конце излучающей линии вытекающей волны и формирует радиочастотный сигнал Sпр. На противоположном конце с помощью отражающего устройства 21 создается максимально возможное отражение, и отраженный сигнал Sотр распространяется по излучающей линии в обратном направлении. На излучающей линии сигналы Sпр и Sотр складываются, излучаются и по приемной линии вытекающей волны поступают в приемный блок 7 для дальнейшей обработки. Все остальное функционирует аналогично устройству, приведенному на фиг.9.
К достоинству данного варианта можно отнести меньшие аппаратурные затраты, однако из-за одностороннего подключения генератора с ЛЧМ сильнее сказываются потери в излучающей линии и проявляются недостатки средства обнаружения MicroTrack II [1].
Литература
1. Southwest Microwave, Inc., Security Systems Division, INTREPID™, MicroTrack™ II, A BURIED TERRAIN-FOLLOWING OUTDOOR PERIMETER INTRUSION DETECTION SYSTEM, MicroTrack II, Installation and Operation Manual.
2. Г.Ф. Шанаев, А.В. Леус. Системы защиты периметра. М.: Секьюрити Фокус, 2011. - 280 с: цв. ил. (Серия «Энциклопедия безопасности»); ISBN978-5-9901176-4-8; Гл.2, п.2.9, стр.83-90.
3. Радиоволновое средство обнаружения TREZOR-R, руководство по эксплуатации ВССВ.425142.003РЭ, п.5.2.
| название | год | авторы | номер документа |
|---|---|---|---|
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ОБЪЕКТОВ | 2007 |
|
RU2348980C2 |
| СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ НА ОСНОВЕ ИЗЛУЧАЮЩЕГО КАБЕЛЯ | 2017 |
|
RU2653307C1 |
| РАДИОВОЛНОВОЙ СПОСОБ ОБНАРУЖЕНИЯ ПЕРЕМЕЩАЮЩИХСЯ ОБЪЕКТОВ | 2005 |
|
RU2292600C1 |
| СПОСОБ И УСТРОЙСТВО РАДИОВОЛНОВОГО ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ | 1998 |
|
RU2145441C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ НА ОСНОВЕ ИЗЛУЧАЮЩЕГО КАБЕЛЯ | 2007 |
|
RU2338260C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 1993 |
|
RU2122238C1 |
| Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях | 2019 |
|
RU2715158C1 |
| УСТРОЙСТВО ДЛЯ ОХРАННОЙ СИГНАЛИЗАЦИИ | 2004 |
|
RU2273884C1 |
| СПОСОБ ОБНАРУЖЕНИЯ НАРУШИТЕЛЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2009 |
|
RU2468441C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2555865C2 |
Изобретение относится к области радиоволновой техники, в частности к способам для охранной сигнализации и к способам контроля за перемещением объектов. Технический результат - возможность определения места нахождения объектов с помощью параллельных линий вытекающей волны, установленных на рубеже охраны, и уменьшение влияния неравномерностей при формировании чувствительной зоны вдоль поверхности земли, различных типов заграждений или разнородных по радиопроводности и радиопрозрачности предметов, что приводит к более точному указанию места нарушения рубежа охраны и к снижению вероятности ложных тревог при высокой вероятности обнаружения датчиков, использующих предлагаемый способ. Способ заключается в том, что на противоположные концы излучающей линии вытекающей волны подают сигналы с изменяемой во времени частотой, на приемной линии вытекающей волны суммарные радиосигналы детектируют и пропускают через полосовые фильтры, соотнося каждой выделенной полосе частот определенный участок линии вытекающей волны. 1 з.п. ф-лы, 13 ил.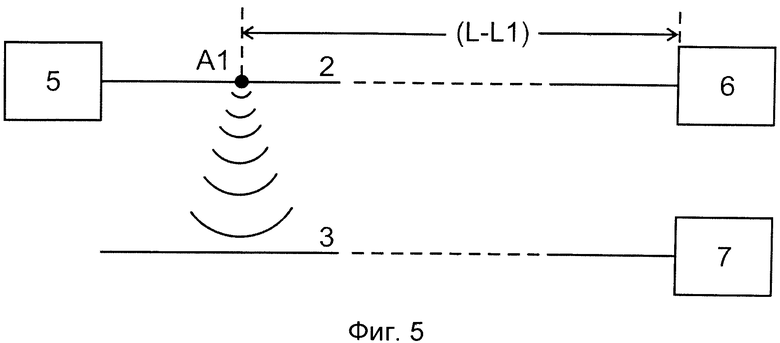
1. Радиоволновой способ обнаружения объектов в контролируемой зоне, сформированной вдоль параллельных излучающей и приемной линий вытекающей волны передающими и приемными устройствами, включающий обработку сигналов, вызванных объектами, перемещающимися в контролируемой зоне, отличающийся тем, что на противоположных концах излучающей линии формируют сигналы с изменяемой во времени частотой, на приемной линии вытекающей волны выделяют огибающую суммарных радиосигналов и пропускают через полосовые фильтры, соотнося каждой выделенной полосе частот определенный участок линии вытекающей волны, причем точность определения места нарушения зависит от количества и ширины полос пропускания полосовых фильтров.
2. Радиоволновой способ обнаружения объектов в контролируемой зоне по п.1, отличающийся тем, что на одном конце излучающей линии формируют сигнал с изменяемой во времени частотой, а на другом конце подключают отражающее устройство или оставляют его не согласованным с волновым сопротивлением излучающей линии.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |

