Предлагаемое изобретение относится к радиолокации протяженных целей. Изобретение может быть использовано в бортовых радиовысотомерах.
Высота полета над поверхностью Земли - важный навигационный параметр летательного аппарата (ЛА). Для ее измерения широко используются радиовысотомерные системы с импульсным и непрерывным ЛЧМ сигналом.
Известны варианты радиовысотомера с непрерывным ЛЧМ сигналом [1]. В первом варианте через передающую антенну в сторону Земли излучается непрерывный ЛЧМ сигнал, девиация и период модуляции которого постоянны, отраженный сигнал, принятый приемной антенной, смешивается с частью излучаемого сигнала с получением сигнала биений, который подвергается спектральному анализу, путем сравнения составляющих спектра с порогом находят самую низкую частоту спектра, соответствующую высоте ЛА, которую выводят на дисплей.
Недостатком способа является необходимость работы с высоким отношением сигнал шум, обеспечивающим допустимую вероятность ложных оценок и погрешность измерения.
Известен радиовысотомер [2] с ЛЧМ зондирующим сигналом, работающим над морем, где следящий строб повторяет с задержкой модуляцию зондирующего сигнала, смешивается с отраженным с получением сигнала биений, спектральный анализ сигнала биений дает огибающую спектра, повторяющую в масштабе огибающую амплитуды сигнала на выходе согласованного с модуляцией сигнала фильтра, содержащую участок шума, переднего фронта и спада, методом максимума правдоподобия аппроксимируется огибающая переднего фронта спектра функцией ошибок, определяются: положение точки τ максимальной крутизны переднего фронта (соответствует положению точки на уровне 0,5 амплитуды спектра), максимальная крутизна переднего фронта отраженного сигнала H, разница уровня амплитуды спектра относительно уровня шума σ, по данным аппроксимации спада отраженного сигнала экспоненциальной функцией определяется постоянная времени α, характеризующая крутизну спада огибающей отраженного сигнала. Оценки τ и H после коррекции по данным оценки постоянной спада отраженного сигнала α соответствуют высоте искусственного спутника относительно Земли и высоте волн морской поверхности. Особенностью устройства радиовысотомера является то, что после получения спектра биений производится сглаживание спектра окном из 8 выборок, нахождение максимума Emax сглаженного спектра и сигнала ошибки по амплитуде, равного 101g(Emax/8Vnom). Автоматическая регулировка усиления по сигналу ошибки устанавливает амплитуду сигнала, соответствующую Vnom. Измеряется разница σ в уровнях максимума спектра сигнала и шума, которая характеризует коэффициент рассеяния зондирующего сигнала морем, соответственно скорость ветра при известной высоте ЛА.
Методом максимума правдоподобия обеспечивается сглаживание флюктуационной составляющей погрешности измерения высоты по переднему фронту отраженного сигнала. Данные спада используются только для коррекции смещения оценки высоты спутника относительно среднего уровня морских волн.
Недостатком способа является использование для дискриминирования сигнала высоты небольшого числа элементов отраженного сигнала, соответственно необходимость работы с высоким соотношением сигнал шум.
Известен способ определения высоты радиовысотомером, взятым в качестве прототипа [3]. Согласно способу в сторону поверхности Земли излучают зондирующий сигнал с фиксированными параметрами модуляции (в качестве зондирующего использован непрерывный ЛЧМ сигнал), принимают отраженный сигнал на N периодах повторения, фильтруют в согласованном с модуляцией зондирующего сигнала фильтре с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала (смешивают зондирующий и отраженные сигналы с получением сигнала биений и находят его спектр), находят огибающую мощности отраженного сигнала с шагом выборки, соответствующим разрешению зондирующего сигнала, мощность сигнала в выборке вычисляется как сумма квадратов квадратурных составляющих выборки сигнала на выходе согласованного фильтра (спектроанализатора), преобразуют каждую выборку огибающей мощности отраженного сигнала в бинарную с использованием порогового обнаружения, складывают одноименные бинарные выборки N огибающих мощности отраженного сигнала (одноименных бинарных спектральных составляющих мощности сигнала биений), определяют высоту по положению первого максимума суммы N бинарных огибающих мощности.
Недостатком способа является то, что требуемая точность измерения достигается при высоких соотношениях сигнал шум.
Целью предлагаемого изобретения является повышение точности измерения за счет снижения флюктуационной погрешности измерения высоты.
Согласно предлагаемому способу:
излучают в сторону земной поверхности зондирующий сигнал с фиксированными параметрами модуляции,
принимают отраженный сигнал на N периодах повторения,
фильтруют в согласованном с модуляцией зондирующего сигнала фильтре с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала  с шагом выборки, соответствующим разрешению зондирующего сигнала,
с шагом выборки, соответствующим разрешению зондирующего сигнала,  ,
,
определяют оценки высоты ЛА nH по каждой из N огибающих амплитуды отраженного сигнала  в последовательности:
в последовательности:
формируют многомерную гипотезу  о высоте n, уровне дисперсии шума
о высоте n, уровне дисперсии шума  и показателе степени m отношения высоты n к наклонной дальности k-функции, аппроксимирующей зависимость удельной эффективной площади рассеяния от углового положения разрешаемого элемента поверхности;
и показателе степени m отношения высоты n к наклонной дальности k-функции, аппроксимирующей зависимость удельной эффективной площади рассеяния от углового положения разрешаемого элемента поверхности;
вычисляют мощность принимаемого сигнала PПР(n,k) на дальностях k, соответствующих гипотезе  , с учетом априорно известных данных о параметрах радиовысотомера (ширине диаграммы направленности приемопередающей антенны Δθ, средней мощности PСР, длине волны λ и разрешении δR зондирующего сигнала):
, с учетом априорно известных данных о параметрах радиовысотомера (ширине диаграммы направленности приемопередающей антенны Δθ, средней мощности PСР, длине волны λ и разрешении δR зондирующего сигнала):

вычисляют функционал соответствия  огибающей амплитуды
огибающей амплитуды  принятого сигнала гипотезе
принятого сигнала гипотезе  :
:

где  - комплексная амплитуда выборки огибающей амплитуды отраженного сигнала на k-ой дальности,
- комплексная амплитуда выборки огибающей амплитуды отраженного сигнала на k-ой дальности,  ;
;
n - индекс, соответствующий гипотезе о высоте ЛА, 0<n<K-1;
перебором гипотез по максимуму функционала соответствия находится наиболее вероятная гипотеза, соответственно оценка nH высоты ЛА;
повторяют измерения nH по N периодам модуляции зондирующего сигнала,
усредняют оценку nH по N измерениям, соответственно получают итоговую оценку высоты.
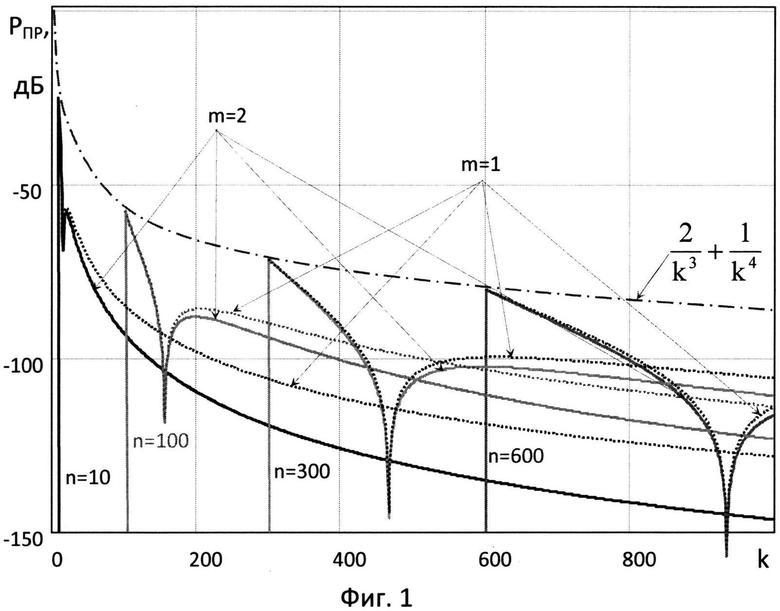
Результаты моделирования (фиг.1) показывают, что огибающая мощности отраженного сигнала в главном лепестке диаграммы направленности антенны слабо зависит от m (показателя, определяющего ширину диаграммы обратного рассеяния (ДОР), при этом в расчетах функционала правдоподобия  можно брать m в диапазоне от 1 до 2.
можно брать m в диапазоне от 1 до 2.
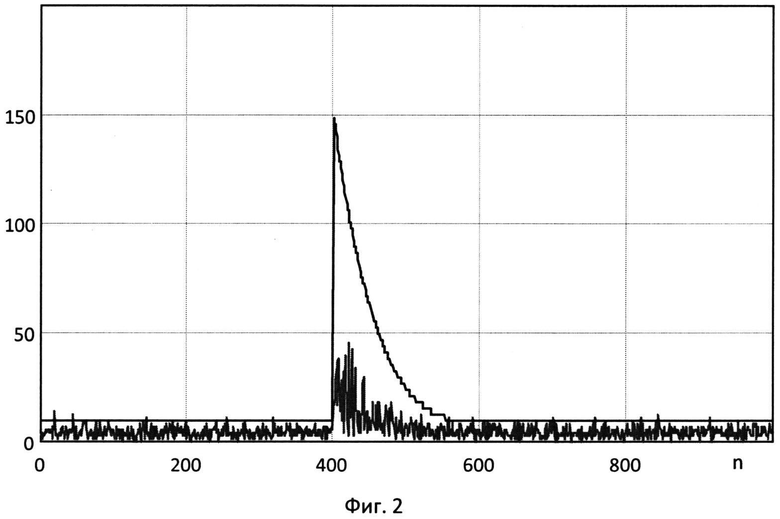
На фиг.2 изображена реализация огибающей мощности отраженного сигнала при моделировании, совмещенная с расчетной для гипотезы, соответствующей максимуму функционала соответствия.
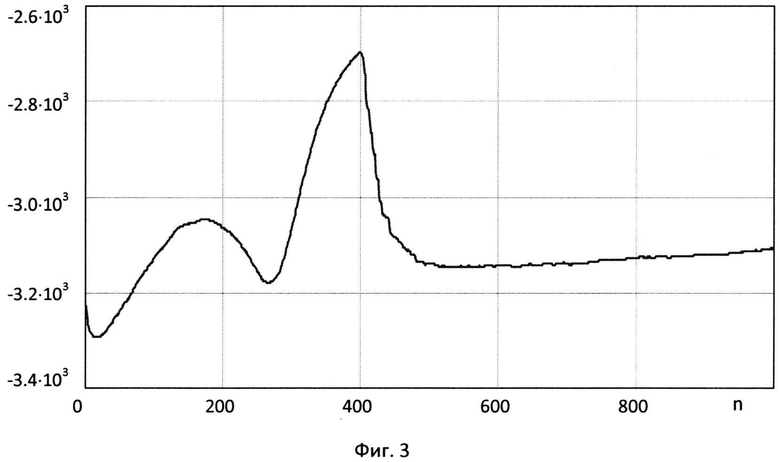
На фиг.3 изображено поведение функционала соответствия при поиске положения минимальной дальности (высоты). Виден четкий максимум в точке, соответствующей высоте ЛА.
Необходимо отметить, что повышение точности достигается при любой длительности среза отраженного сигнала (разности хода сигнала до разрешаемых элементов, находящихся в пределах облученного участка земной поверхности), однако наибольший выигрыш достигается при разности хода более десятка элементов разрешения за счет увеличения информации, содержащейся в огибающей среза отраженного сигнала. Данное условие соблюдается во множестве случаев применения на максимальных высотах эксплуатации.
Рассмотренный способ относится к измерителям, работающим как с импульсным сигналом, так и непрерывным. Особенностью измерения высоты при работе с непрерывным ЛЧМ сигналом, где огибающую амплитуды отраженного сигнала получают путем спектрального анализа сигнала биений, является то, что вместо поиска положения скачка дисперсии амплитуды отраженного сигнала ищут положение скачка дисперсии спектра биений отраженного сигнала.
Устройство радиовысотомера [3] взято в качестве прототипа. В этом устройстве контроллер на первом выходе формирует сигналы, синхронизирующие работу передатчика ЛЧМ сигнала, передатчик формирует на N периодах повторения зондирующий сигнал, излучаемый передающей антенной вертикально в сторону земной поверхности, прием ведется приемной антенной, пространственно разнесенной с передающей, отраженный сигнал, принятый приемной антенной, демодулируется по частоте (по умолчанию понимается, что он смешивается с частью мощности зондирующего сигнала) с получением сигнала биений, который селектируется по частоте полосовым фильтром, амплитудно-частотная характеристика которого компенсирует изменение мощности отраженного сигнала от расстояния, оцифровывают сигнал, обрабатывают в контроллере, обработка включает вычисление спектра сигнала биений на каждом периоде повторения, формирование бинарного спектра с помощью пороговой обработки, формирование суммарного спектра, составляющие которого являются суммой бинарных составляющих спектров N периодов повторения, определение положения ближайшего максимума суммарного спектра, соответствующего оценке высоты, выдачу результата измерения на дисплей. При работе контроллер исходную информацию, результаты расчетов хранит и извлекает по необходимости в схеме памяти, соединенной с ним через двунаправленную связь.
В данном устройстве минимизация ошибки измерения по всей информации, содержащейся в огибающей амплитуды отраженного сигнала, не предусматривается.
Сущность изобретения устройства, реализующего способ, поясняется дальнейшим описанием и чертежами.
На фиг.1 изображены расчетные огибающие мощности отраженного сигнала на разных высотах.
На фиг.2 изображена реализация огибающей мощности отраженного сигнала при моделировании, совмещенная с расчетной для гипотезы, соответствующей максимуму функционала соответствия.
На фиг.3 изображено поведение функционала соответствия при поиске положения минимальной дальности (высоты).
На фиг.4 изображена предлагаемая структура радиовысотомера.
На фиг.4 приняты следующие обозначения:
1 - Синхронизатор (СНХ);
2 - Передатчик ЛЧМ сигнала (ПРД);
3 - Передающая антенна (А1);
4 - Полосовой фильтр (ПФ);
5 - Смеситель (СМ);
6 - Малошумящий усилитель (МШУ);
7 - Приемная антенна (А2);
8 - Аналого-цифровой преобразователь (АЦП);
9 - Блок быстрого преобразования Фурье (БПФ);
10 - Вычислитель функционала соответствия (ВФС);
11 - Схема вычисления высоты (СВВ);
12 - Вычислитель огибающей мощности отраженного сигнала (ВОМ).
На фиг.4 последовательно соединены синхронизатор 1, передатчик ЛЧМ сигнала 2, передающая антенна 3, последовательно соединены приемная антенна 7, малошумящий усилитель 6, смеситель 5, полосовой фильтр 4, аналого-цифровой преобразователь (АЦП) 8, блок быстрого преобразования Фурье 9, вычислитель функционала соответствия 10, схема вычисления высоты и вычислитель огибающей мощности отраженного сигнала, второй выход передатчика ЛЧМ сигнала соединен с одноименным входом смесителя, второй выход синхронизатора 1 соединен с первым выходом схемы вычисления высоты 11, третий выход которой соединен с вторым входом вычислителя функционала соответствия 10, выход вычислителя огибающей мощности отраженного сигнала 12 соединен с третьим входом вычислителя функционала соответствия 10, первый выход схемы вычисления высоты 11 является выходом радиовысотомера для связи с потребителем.
Все элементы радиовысотомера, изображенного на фиг.4, известны, освоены и выпускаются на рынок современной промышленностью, в том числе:
Передатчик ЛЧМ сигнала 1 может быть может быть выполнен на основе генератора, работающего методом прямого цифрового синтеза, формирующего ЛЧМ сигнал на промежуточной частоте с заданной крутизной и длительностью прямого и обратного хода, с помощью с помощью квадратурного балансного смесителя и гетеродина данный сигнал переносится на несущую частоту.
Смеситель 5 может быть реализован с помощью микросхем фирмы Hittite Microwave Corp.
АЦП 8, блок БПФ 9, вычислитель функционала соответствия 10, схема вычисления высоты 11 и вычислитель огибающей мощности отраженного сигнала 12 могут быть реализованы в бортовой вычислительной машине ВБ-480-01.
Работа радиовысотомера описывается со ссылками на фиг.4 и происходит следующим образом.
До начала боевой работы априорно известны длина волны λ, ширина диаграммы направленности антенны Δθ, разрешение сигнала δR и используются в расчетах, выполняемых вычислителем огибающей мощности отраженного сигнала 12.
Во время боевой работы синхронизатор 1 на первом выходе формирует импульсы синхронизации передатчика ЛЧМ сигнала 2 с периодом повторения TП и длительностью τИ, соответствующей времени обратного хода. На втором выходе синхронизатора 1 формируются импульсы, синхронизирующие такт измерения высоты, поступающие на схему вычисления высоты 11. Период такта измерений TИЗ>NTП, где N - число независимых одиночных усредняемых измерений высоты.
Передатчик ЛЧМ сигнала 2 формирует на несущей частоте непрерывный ЛЧМ сигнал с девиацией ΔfC, периодом повторения модуляции TП и длительностью обратного хода τИ, который с первого выхода поступает на передающую антенну 3 и излучается в направлении Земли. Отраженный сигнал принимается приемной антенной 7 и поступает через малошумящий усилитель 6 на смеситель 5, где смешивается с частью мощности ЛЧМ зондирующего сигнала, поступающей на его второй вход с второго выхода передатчика ЛЧМ сигнала 2. В результате смешения образуется сигнал биений UБ(t) с частотой:
fБ=fН(t)-fОТР(t)=(f0+kf(t))-(f0+kf(t-τ))=kfτ,
где kf=ΔfC/(TП-τИ) - крутизна девиации несущей частоты;
fН(t) - несущая частота зондирующего сигнала;
fОТР(t) - частота отраженного сигнала.
Сигнал биений UБ(t) проходит полосовой фильтр 4, амплитудно-частотная характеристика которого давит частотные составляющие сигнала биений, не соответствующие рабочему диапазону высот от fmin до fmax.
После полосового фильтра 4 сигнал биений оцифровывается в АЦП 8 с частотой выборки fВ=2fmax. Такая частота обеспечивает получение квадратурных составляющих оцифрованного сигнала. Квадратурный сигнал поступает в блок БПФ, где на выходе получают спектр, k-ые частные составляющие которого однозначно связаны с дальностным положением k-ых временных выборок отраженного сигнала:

где c - скорость света в свободном пространстве.
Реализация спектра сигнала биений  (огибающая амплитуды отраженного сигнала на выходе согласованного с модуляцией сигнала фильтра) с устройства блока БПФ 9 поступает на вычислитель функционала соответствия 10. Оценка высоты по реализациям огибающей амплитуды отраженного сигнала - результат совместной работы схемы вычисления высоты 11, вычислителя функционала соответствия 10 и вычислителя огибающей мощности отраженного сигнала 12. Такт вычислений задается импульсом, синхронизатора 1, приходящим на первый вход схемы вычисления высоты 11.
(огибающая амплитуды отраженного сигнала на выходе согласованного с модуляцией сигнала фильтра) с устройства блока БПФ 9 поступает на вычислитель функционала соответствия 10. Оценка высоты по реализациям огибающей амплитуды отраженного сигнала - результат совместной работы схемы вычисления высоты 11, вычислителя функционала соответствия 10 и вычислителя огибающей мощности отраженного сигнала 12. Такт вычислений задается импульсом, синхронизатора 1, приходящим на первый вход схемы вычисления высоты 11.
С приходом импульса запуска измерения схема вычисления высоты 11 формирует гипотезу  , включающую значения высоты n, дисперсии шума
, включающую значения высоты n, дисперсии шума  и параметра, определяющего ширину диаграммы обратного рассеяния m. Значения (n,m) выдаются схемой вычисления высоты 11 на вход вычислителя огибающей мощности отраженного сигнала 12, которая в соответствии с выражением (1) вычисляет огибающую мощности отраженного сигнала PПР (n,k) и выдает ее на третий вход вычислителя функционала соответствия 10. Значения
и параметра, определяющего ширину диаграммы обратного рассеяния m. Значения (n,m) выдаются схемой вычисления высоты 11 на вход вычислителя огибающей мощности отраженного сигнала 12, которая в соответствии с выражением (1) вычисляет огибающую мощности отраженного сигнала PПР (n,k) и выдает ее на третий вход вычислителя функционала соответствия 10. Значения  приходят на второй вход вычислителя функционала соответствия 10 со схемы вычисления высоты 11. Вычислитель функционала соответствия 10 по выражению (2) вычисляет значение функционала
приходят на второй вход вычислителя функционала соответствия 10 со схемы вычисления высоты 11. Вычислитель функционала соответствия 10 по выражению (2) вычисляет значение функционала  и выдает на второй вход схемы вычисления высоты 11. По результатам перебора гипотез схема вычисления высоты 11 находит гипотезу, дающую максимум функционала соответствия
и выдает на второй вход схемы вычисления высоты 11. По результатам перебора гипотез схема вычисления высоты 11 находит гипотезу, дающую максимум функционала соответствия  , по которой определяется одиночная оценка nH - высота ЛА. Повторяют оценки высоты N раз по разным реализациям огибающей амплитуды отраженного сигнала, усредняют N одиночных оценок и выдают с первого выхода схемы вычисления высоты 11 итоговую оценку потребителю: H=〈nH〉δR.
, по которой определяется одиночная оценка nH - высота ЛА. Повторяют оценки высоты N раз по разным реализациям огибающей амплитуды отраженного сигнала, усредняют N одиночных оценок и выдают с первого выхода схемы вычисления высоты 11 итоговую оценку потребителю: H=〈nH〉δR.
Проведены лабораторные испытания макета радиовысотомера, подтверждающие снижение среднеквадратичной ошибки (СКО) измерения от отношения сигнал шум предлагаемым способом относительно СКО измерения высоты по порогу обнаружения. При соотношении сигнал шум 0 дБ в условиях моделирования выигрыш составил более 1,8 раза.
Техническим преимуществом предлагаемого радиовысотомера перед прототипом является повышение точности при одинаковом времени наблюдения за счет уменьшения флюктуационной погрешности.
Пользуясь сведениями, представленными в материалах заявки, предлагаемый радиовысотомер может быть изготовлен по существующей, известной в радиопромышленности технологии на базе известных комплектующих изделий и использован при пилотируемой и автономной навигации различных летательных аппаратов.
ЛИТЕРАТУРА
1. Патент США 4568938 "Radar altimeter nearest return tracking".
2. Патент США 5923283 «Altimetric type measurement method for use on a satellite".
3. Патент США 7825851 "History or image based methods for altitude determination in radar altimeter".
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И РАДИОВЫСОТОМЕР С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩИЙ СПОСОБ | 2013 |
|
RU2552515C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ И УСТРОЙСТВО РАДИОВЫСОТОМЕРА С НЕПРЕРЫВНЫМ ЛЧМ СИГНАЛОМ, ИСПОЛЬЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550082C1 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2550081C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ИЗМЕРЕНИЯ ВЫСОТЫ И СОСТАВЛЯЮЩИХ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И УСТРОЙСТВО РАДИОВЫСОТОМЕРА, РЕАЛИЗУЮЩЕГО СПОСОБ | 2013 |
|
RU2551896C2 |
| СПОСОБ ИЗМЕРЕНИЯ ВЫСОТЫ, ИСТИННОЙ СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА И НАКЛОНА ВЕКТОРА СКОРОСТИ ЛЕТАТЕЛЬНОГО АППАРАТА ОТНОСИТЕЛЬНО ГОРИЗОНТА, УСТРОЙСТВО БОРТОВОЙ РАДИОЛОКАЦИОННОЙ СТАНЦИИ, ИСПОЛЬЗУЮЩЕЕ СПОСОБ | 2016 |
|
RU2643168C2 |
| СПОСОБ ОДНОЛУЧЕВОГО ОПРЕДЕЛЕНИЯ ВЫСОТНО-СКОРОСТНЫХ ПАРАМЕТРОВ ВОЗДУШНОГО СУДНА ПО СИГНАЛАМ КОГЕРЕНТНОГО РАДИОВЫСОТОМЕРА | 2021 |
|
RU2782374C1 |
| Способ и устройство измерения высоты и составляющих скорости по сигналам двухканального когерентного радиовысотомера | 2024 |
|
RU2832999C1 |
| СПОСОБ ОЦЕНКИ ЭФФЕКТИВНОЙ ПЛОЩАДИ РАССЕЯНИЯ АЭРОДИНАМИЧЕСКОЙ ЦЕЛИ | 2021 |
|
RU2773818C1 |
| УСТРОЙСТВО РАДИОЛОКАЦИОННОЙ СТАНЦИИ С НЕПРЕРЫВНЫМ ЛИНЕЙНО-ЧАСТОТНО-МОДУЛИРОВАННЫМ СИГНАЛОМ И СИНТЕЗОМ АПЕРТУРЫ | 2017 |
|
RU2660450C1 |
| ИМИТАТОР РАДИОЛОКАЦИОННОЙ ЦЕЛИ | 2018 |
|
RU2676469C1 |
Изобретение относится к радиолокации и может быть использовано в бортовых радиовысотомерах. Достигаемый технический результат - повышение точности за счет снижения флюктуационной ошибки измерения высоты. Указанный результат достигается за счет того, что производится излучение непрерывного линейно-частотно-модулированного сигнала в сторону поверхности Земли, прием отраженных сигналов на N периодах повторения, фильтрация отраженного сигнала в согласованном с модуляцией зондирующего сигнала фильтре с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала с шагом выборки, соответствующим разрешению зондирующего сигнала, определение оценки высоты летательного аппарата (ЛА) по каждой из N реализаций огибающей амплитуды отраженного сигнала в следующей последовательности: формируют многомерную гипотезу о высоте, уровне дисперсии шума и параметре, определяющем зависимость диаграммы обратного рассеяния от углового положения разрешаемого элемента поверхности, вычисляют мощность принимаемого сигнала на дальностях, соответствующих определенной гипотезе с учетом априорно известных данных о параметрах радиовысотомера, вычисляют функционал соответствия огибающей амплитуды принятого сигнала, соответствующий определенной гипотезе, перебором гипотез по максимуму функционала соответствия находят наиболее вероятную гипотезу, оценку высоты ЛА, повторяют измерения высоты по N периодам повторения, усредняют оценку высоты по N измерениям, соответственно получают итоговую оценку высоты. 2 н. и 2 з.п. ф-лы, 4 ил. 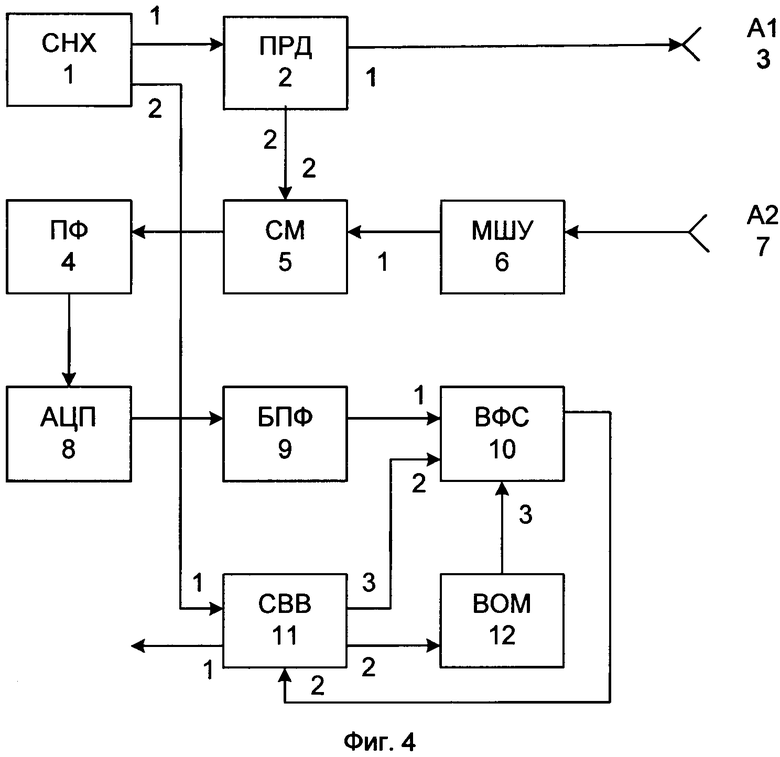
1. Способ радиолокационного измерения высоты включает излучение в сторону земной поверхности зондирующего сигнала с фиксированными параметрами модуляции, прием отраженных сигналов на N периодах повторения, фильтрацию отраженного сигнала в согласованном с модуляцией зондирующего сигнала фильтре с получением в каждом периоде повторения огибающей амплитуды отраженного сигнала 



2. Способ радиолокационного измерения высоты по п. 1 отличается тем, что огибающая мощности принятого сигнала РПР(n, k) вычисляется как произведение четырех сомножителей: первый сомножитель равен произведению числа % на среднюю мощность зондирующего сигнала и квадрат длины волны зондирующего сигнала, деленного на квадрат разрешения зондирующего сигнала по дальности, второй сомножитель равен квадрату функции, описывающей приемную диаграмму направленности в зависимости от отношения высоты n к наклонной дальности k, третий сомножитель описывает зависимость удельной эффективной площади рассеяния от отношения высоты n к наклонной дальности k, четвертый сомножитель описывает зависимость мощности отраженного сигнала от наклонной дальности.
3. Способ радиолокационного измерения высоты по п. 1 отличается тем, что функционал соответствия


4. Радиовысотомер содержит последовательно соединенные синхронизатор, передатчик линейно-частотно-модулированного (ЛЧМ) сигнала и передающую антенну, последовательно соединенные приемную антенну, малошумящий усилитель, смеситель, полосовой фильтр, аналого-цифровой преобразователь (АЦП) и блок быстрого преобразования Фурье, второй выход передатчика ЛЧМ сигнала соединен со вторым входом смесителя, отличается тем, что введены вычислитель функционала соответствия, схема вычисления высоты и вычислитель огибающей мощности отраженного сигнала, при этом огибающая амплитуды отраженного сигнала с выхода блока быстрого преобразования Фурье поступает на первый вход вычислителя функционала соответствия, второй выход синхронизатора соединен с первым входом схемы вычисления высоты, третий выход которой соединен со вторым входом вычислителя функционала соответствия, выход вычислителя огибающей мощности отраженного сигнала соединен с третьим входом вычислителя функционала соответствия, первый выход схемы вычисления высоты является выходом радиовысотомера для связи с потребителем, схема вычисления высоты формирует гипотезы о высоте, дисперсии шума и параметре, определяющем ширину диаграммы обратного рассеяния облученной поверхности, выдает ее значения в вычислитель функционала соответствия и вычислитель огибающей мощности отраженного сигнала, принимает значения функционала соответствия, перебором гипотез находит гипотезу, обеспечивающую максимум функционала соответствия, соответственно одиночную оценку высоты, усредняет независимые одиночные оценки высоты для получения итоговой, выдает ее потребителю.

