Изобретение относится к области охранной сигнализации, в частности к средствам мониторинга охраняемой территории, предназначенным для обнаружения и идентификации объектов, проникающих на охраняемую территорию и вызывающих срабатывание технических средств обнаружения при движении объектов по охраняемой территории, преимущественно к техническим средствам подводной/подледной охраны морских нефтегазовых платформ (МНП) в ледовых условиях и может быть использовано для защиты от проникновения на охраняемые объекты со стороны водных акваторий, на предприятиях энергетического, химико-технологического, оборонного и других профилей со стороны рубежей в водной среде, а также в водоемах, вдоль берегов рек, в мелком море, бухтах и т.п.
В настоящее время комплексы охраны МНП ориентированы на выполнение своих функций в условиях акваторий, свободных от ледовых образований. Вместе с тем, в условиях Арктики ледовые покровы вблизи МНП сохраняются в течение 8 месяцев. Это вносит значительные коррективы в номенклатуру технических средств, предназначенных для организации охраны МНП в ледовых условиях.
Известно устройство обнаружения вторжения подводного объекта в контролируемую область, содержащее гидроакустический излучатель, отражатели, вдоль эллиптической поверхности, в фокусах которой расположены гидроакустический излучатель и гидроакустический приемник, причем последний выполнен с равномерной характеристикой направленности. В качестве гидроакустического излучателя используют передающую круговую антенну (патент RU №2150123, 2000 г. [1]).
Известно также устройство, содержащее защитную металлическую сетку водозаборного сооружения, низкочастотный излучатель, детектор и анализатор низкочастотных сигналов (патент RU №2256196,2005 г. [2]).
Оба устройства сложны и в исполнении, и в эксплуатации.
Известно устройство для охраны водных рубежей, содержащее сигнальное заграждение, выполненное в виде троса, протянутого над водой вдоль охраняемого рубежа и закрепленного на вертикальных опорах, на котором подвешены шесты с грузами на концах в виде маятников, чувствительный элемент подключен к формирователю сигнала тревоги. Чувствительный элемент выполнен в виде коаксиального кабеля, содержащего внутренний и внешний проводники, разделенные изоляцией из фторопластовой ленты, внутренний проводник размещен в сердечнике из упруго сжимаемого электропроводящего материала, фторопластовая лента намотана на внутренний проводник по спирали с положительным перекрытием, на внешнем проводнике концентрично расположена защитная оболочка, коаксиальный кабель проложен под тросом вдоль его оси и жестко соединен с каждым шестом (авторское свидетельство SU №1819024,2000 г. [3]). Недостатком устройства является низкая чувствительность (обнаружение лишь при непосредственном воздействии на устройство) и кратковременность акта обнаружения. Возможны и ложные тревоги при соприкосновении с устройствами механического воздействия, например, затопленными предметами.
Известно также устройство для охраны водных рубежей, содержащее сигнальное заграждение в виде троса, протянутого над водой вдоль охраняемого рубежа и закрепленного на вертикальных опорах, коаксиальный радиочастотный кабель, закрепленный на тросе по всей его длине и соединенный своим центральным проводником через разделительный конденсатор с входом устройства формирования сигнала тревоги, и чувствительный элемент, выполненный в виде отрезков пьезоэлектрического кабеля с грузами на одном конце, подвешенных с противоположных концов, в точках крепления коаксиального радиочастотного кабеля к тросу, отрезки пьезоэлектрического кабеля соединены с радиочастотным кабелем с помощью согласующих устройств, питаемых от общего источника питающего напряжения через нагрузочный резистор, включенный между выходом источника питающего напряжения и центральным проводником коаксиального радиочастотного кабеля, а второй полюс источника питающего напряжения соединен с экранирующей заземленной оплеткой коаксиального радиочастотного кабеля (патент RU №2375755, 2009 г. [4]).
Известное устройство [4] чувствительно к воздействию помех, возбуждаемых в отрезках пьезоэлектрического кабеля природным фактором - перемещением относительно отрезков водных масс, вызванных действием ветра или приливно-отливными явлениями, что приводит к генерации сигналов ложной тревоги или даже пропуску нарушителя. Напряжение помех, возбуждаемых природным фактором, и ширина его спектра частот зависит от скорости перемещения водных масс относительно отрезков пьезоэлектрического кабеля.
Эквивалентные недостатки имеют и известные аналогичные устройства (патенты RU №2364883 С1, 20.08.2009 [5], RU №79678 U1, 27.03.2011 [6], RU №2271551 С2, 10.03.2006 [7], US №5646907 А1, 08.07.1997 [8], US №5481505 А1, 02.01.1996 [9], US №5305286 А1, 19.04.1994 [10], заявки US №200990201763 А1, 13.08.2009 [11], WO №2008/093088 А2, 07.08.2008 [12], патент GB №2238121 А, 13.08.2009 [13]).
Техническим результатом также известного устройства для охраны водных рубежей является снижение чувствительности к помехам, вызванным природными факторами (патент RU №2568781 С2, 20.11.2015 [14]).
При этом технический результат достигается тем, что в устройстве для охраны водных рубежей, содержащем сигнальное заграждение в виде троса, протянутого над водой вдоль охраняемого рубежа и закрепленного на вертикальных опорах, коаксиальный радиочастотный кабель, закрепленный на тросе по всей его длине и соединенный своим центральным проводником через разделительный конденсатор с входом устройства формирования сигнала тревоги, чувствительный элемент, выполненный в виде отрезков пьезоэлектрического кабеля с грузами на одном конце, подвешенных с противоположных концов в точках крепления коаксиального радиочастотного кабеля к тросу и соединенных с радиочастотным кабелем с помощью согласующих устройств, питаемых от общего источника питающего напряжения через нагрузочный резистор, включенный между выходом источника питающего напряжения и центральным проводником коаксиального радиочастотного кабеля, а второй полюс источника питающего напряжения соединен с экранирующей заземленной оплеткой коаксиального радиочастотного кабеля, под водой вдоль охраняемого рубежа установлены ненаправленные электроакустические излучатели, равноудаленные от каждого из грузов отрезков пьезоэлектрического кабеля, синфазно включенные по отдельной линии связи с генератором напряжения килогерцового диапазона частот, причем все соединения герметизированы.
Недостатком известного устройства [14] является то, что сигнальное заграждение выполнено в виде троса, протянутого над водой вдоль охраняемого рубежа и закрепленного на вертикальных опорах. При неблагоприятных погодных условиях, шквалистый ветер, высокое волнение, ледообразование в северных широтах, эксплуатационная надежность такого устройства не высокая.
Мониторинг обширных территорий изначально связан с наличием центрального пункта управления, значительного количества технических средств обнаружения, а также разветвленной системой передачи информации (радиоканалов связи). Такой мониторинг является общеизвестным и реализуется в виде варианта двухуровневой системы, в которой каждое техническое средство обнаружения посредством радиоканала связано непосредственно с центральным пунктом управления. Наличие в такой системе большого количества технических средств обнаружения определяет повышенные требования к организации и настройке радиоканалов связи для надежной доставки тревожных сообщений на центральный пункт управления.
Общеизвестны охранные системы, реализованные в виде двухуровневых систем. Например, известна «Система охраны периметра «Радиорубеж», описанная в патенте на полезную модель RU №129283 U1, 2013 г. [15]. Система содержит блок средств обнаружения и блок сбора и отображения информации. Блок средств обнаружения содержит датчики движения, работающие на различных физических принципах: пассивные инфракрасные датчики (ИК), активные радиолучевые двухпозиционные датчики и активные вибрационные трибоэлектрические датчики. Связь между всеми датчиками движения и блоком сбора и отображения информации осуществляется с помощью радиоканала связи 433 МГц. Система обеспечивает расширение зоны охраны и мониторинга объектов, с которыми нет проводных линий связи. При обнаружении нарушителя датчики формируют тревожное извещение и передают его через соседние датчики, работающие в этом случае в качестве ретрансляторов, в блок сбора и отображения информации.
Сходными существенными признаками являются: датчики, работающие на различных физических принципах, блок сбора и отображения информации, связь между всеми датчиками и блоком сбора и отображения информации с помощью радиоканала (отсутствие проводных линий связи).
Недостатком системы является отсутствие возможности мониторинга охраняемых территорий путем визуальной идентификации человека-нарушителя для отличия его от животных, птиц и других помеховых факторов.
Известен «Мобильный комплекс технических средств охраны», описанный в патенте RU №2427039, 20.08.2011 [16]. Комплекс содержит пункт управления, оптико-электронные средства объемно-кругового обзора на основе телевизионной и тепловизионной аппаратуры и периметровую охранную систему, состоящую из периметровых средств обнаружения и периметровых оптико-электронные средства наблюдения. Периметровая охранная система, состоит из N локальных постов охраны, каждый из которых содержит передатчик и приемник двухпозиционного радиолучевого средства обнаружения, пассивное инфракрасное средство обнаружения, тепловизор и датчик обнаружения приближения нарушителя к локальному посту охраны (обрывное средство обнаружения). Все средства обнаружения и наблюдения имеют в своем составе радиопередатчики, передающие информацию в пункт управления. Данный комплекс обеспечивает контроль наземного и воздушного пространства охраняемой территории. При обнаружении нарушителя производится его визуальная классификация, нацеливание оптико-электронных средств объемно-кругового обзора и сопровождение нарушителя в контролируемом пространстве.
Сходными существенными признаками являются: пункт управления, периметровая охранная система, состоящая из локальных постов охраны, периметровые средства обнаружения (радиолучевые, пассивные инфракрасные, обрывные) и периметровые оптико-электронные средства наблюдения.
Недостатками известного комплекса являются:
1) отсутствие в комплексе двусторонней радиосвязи между пунктом управления и остальными составными частями комплекса, что ограничивает функциональные возможности комплекса (пункт управления обеспечивает односторонний прием радиосигналов и в нем отсутствует возможность настройки составных частей комплекса и управления ими);
2) передача информации в комплексе осуществляется на одной радиочастоте радиоканала связи, что усложняет одновременный прием сигналов срабатывания от средств обнаружения и видеоинформации от средств наблюдения.
Все упомянутые недостатки частично устраняются в известной системе intelligent sensor network (Интеллектуальная сеть датчиков)», описанной в патенте US №8710983,2014 г. [17]. Система содержит группу узлов сети датчиков (технических средств обнаружения) и шлюз (центральный пункт управления). Группа узлов сети датчиков и шлюз образуют одно ранговую радиосеть, передача информации в которой осуществляется путем выбора маршрутов по критерию наилучшего качества радиосвязи. В состав каждого из узлов сети датчиков (технического средства обнаружения) входят: от одного до N датчиков (тревожной сигнализации), работающих на разных физических принципах, сетевой модуль (радиомодем), модуль обнаружения активности, процессор с модулем памяти и источник питания. Процессор предназначен для обработки информации, поступающей от датчиков тревожной сигнализации, и формировании маршрутов передачи информации на шлюз (центральный пункт управления). Память предназначена для хранения алгоритмов обработки и маршрутизации. В состав шлюза (центрального пункта управления) входят: центральный процессор (персональная электронно-вычислительная машина) с графическим монитором, модуль подключения (коммуникационный модуль) и модуль сетевого интерфейса (радиомодем). Коммуникационный модуль предназначен для обеспечения связи системы с внешними устройствами (серверами, переносными пультами управления и т.п.) с помощью сетей LAN, WAN или интерфейса Ethernet. Узлы сети датчиков (технические средства обнаружения) могут находиться в «спящем» (sleep) режиме, обеспечивающим режим малого энергопотребления. Модуль обнаружения активности предназначен для перехода узла сети датчиков в активный режим для обнаружения объекта нарушения рубежа охраны. Источники питания могут быть выполнены в виде аккумуляторных или солнечных батарей, а также в виде других альтернативных источников электропитания.
Сходными существенными признаками являются: шлюз (центральный пункт управления) и группа узлов сети датчиков (технических средств обнаружения); входящие в состав шлюза (центрального пункта управления) - радиомодем, коммуникационный модуль, и персональная электронно-вычислительная машина с графическим монитором; входящие в состав каждого из узлов сети датчиков (технических средств обнаружения) - радиомодем, модуль обнаружения активности, процессор с модулем памяти, источник питания, и датчики тревожной сигнализации (от одного до N), работающие на разных физических принципах; радиомодемы, выполненные с возможностью приема-передачи информации между шлюзом (центральным пунктом управления) и группой узлов сети датчиков (технических средств обнаружения), связанных между собой в одно ранговую радиосеть и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи.
Недостатком системы является отсутствие возможности мониторинга охраняемых территорий с учетом визуальной идентификации человека-нарушителя для отличия его от животных, птиц и других помеховых факторов.
Устранение отмеченного недостатка предусмотрено в известном техническом решении (патент RU №2629521 С1, 29.08.2017 [18]), путем использования малокадровых систем видеонаблюдения, выполненных с возможностью выделения предтревожной, тревожной и после тревожной видеоинформации для достоверной визуальной идентификации обнаруженных объектов; разделения радиоканалов связи по частотам для передачи на центральный пункт управления тревожных сообщений от технических средств обнаружения и видеоинформации от технических средств видеонаблюдения; обеспечения техническими средствами обнаружения и техническими средствами видеонаблюдения ретрансляции передаваемых сообщений на центральный пункт управления; возможности изменения алгоритмов обработки информации, поступающей в центральный пункт управления от технических средств обнаружения, с учетом физического принципа работы датчиков тревожной сигнализации, расположения их на местности, существующей оперативной обстановке на охраняемой территории и определенном направлении движения обнаруженного объекта.
При этом поставленная задача достигается посредством интеллектуальной сетевой системой мониторинга охраняемой территории, которая содержит центральный пункт управления и группу технических средств обнаружения, в состав центрального пункта управления входят первый радиомодем, работающий на радиочастоте первого радиоканала связи, коммуникационный модуль с возможностью связи с внешними устройствами с помощью сетевого интерфейса и персональная электронно-вычислительная машина с графическим монитором, в состав каждого технического средства обнаружения входит первый радиомодем, модуль обнаружения активности, процессор с модулем памяти, источник питания и датчики тревожной сигнализации (от одного до N), работающие на разных физических принципах, первые радиомодемы выполнены с возможностью приема-передачи информации между центральным пунктом управления и группой технических средств обнаружения, которые связаны между собой в первую одно ранговую радиосеть, работающую на радиочастоте первого радиоканала связи и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи, в состав системы включена группа технических средств видеонаблюдения, содержащих малокадровые системы видеонаблюдения, выполненные с возможностью выделения предтревожной, тревожной и после тревожной видеоинформации, при этом каждое техническое средство видеонаблюдения содержит второй радиомодем, работающий на радиочастоте второго радиоканала связи для передачи видеоинформации на центральный пункт управления, в состав которого для приема видеоинформации дополнительно включен второй радиомодем, группа технических средств видеонаблюдения и центральный пункт управления связаны между собой во вторую одно ранговую радиосеть, работающую на радиочастоте второго радиоканала связи и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи.
При этом датчики тревожной сигнализации, входящие в состав технических средств обнаружения, выполнены с возможностью функционирования в виде сейсмических датчиков тревожной сигнализации с классификацией нарушителя («одиночный», «группа», «транспортное средство») и определением направления движения («к нам», «от нас»); радиоволновых датчиков тревожной сигнализации для работы на местности со сложным ландшафтом; пассивных инфракрасных датчиков тревожной сигнализации; магнитометрических датчиков тревожной сигнализации с определением наличия у нарушителя металлического оружия («вооружен» или «не вооружен»); однопозиционных или двухпозиционных радиолучевых датчиков тревожной сигнализации; обрывных датчиков тревожной сигнализации.
Группа технических средств обнаружения по количеству используемых типов датчиков тревожной сигнализации состоит из различной комбинации сейсмических, радиоволновых, инфракрасных, магнитометрических, радиолучевых и обрывных датчиков тревожной сигнализации.
Алгоритмы обработки информации, поступающей в центральный пункт управления от технических средств обнаружения, выбираются с учетом физического принципа работы датчиков тревожной сигнализации, расположения их на местности, существующей оперативной обстановки на охраняемой территории и определенном направлении движения обнаруженного объекта в соответствии с решающими правилами «И», «ИЛИ», «2 из 3». Алгоритмы обработки информации могут выбираться с возможностью комбинирования сигналов от датчиков тревожной сигнализации, работающих на разных физических принципах, а также с возможностью использования нейросетевых алгоритмов и алгоритмов нечеткой логики для интеллектуальной обработки информации в центральном пункте управления.
Персональная электронно-вычислительная машина, входящая в состав центрального пункта управления, выполнена в виде автоматизированного рабочего места оператора, которое обеспечено архивной памятью, системой тревожного оповещения и необходимым комплектом программного обеспечения с возможностью отображения плана местности на экране графического монитора, обозначения на плане местности технических средств обнаружения и технических средств видеонаблюдения, а также с возможностью регистрации тревожных сигналов технических средств обнаружения и видеоинформации, поступающей от технических средств видеонаблюдения.
Недостатком известной интеллектуальной сетевой системы мониторинга охраняемой территории [18] является то, основу такой системы составляют радиоволновые и инфракрасные датчики, работающие в воздушной среде, что существенно сужает область применения такой системы, т.е. данная система работоспособна только в условиях суши. Кроме того, известная система не решает задачу охраны территории при проникновении на нее несанкционированных объектов воздушным путем.
В тоже время имеется ряд объектов морской хозяйственной деятельности (ОМХД) таких как береговые хранилища углеводородов, порты, надводные и подводные морские загрузочные терминалы углеводородов, морские добычные платформы, представляющих собой объекты повышенных рисков в части возможных диверсий. Для охраны морских платформ для добычи углеводородов в условиях чистой воды традиционно применяются гидроакустические и оптические средства.
В ледовых условиях и при возможном негативном воздействии международных конкурентов на работу подводных механизмов устьевого оборудования требуется решать задачи дальнего обнаружения подводных объектов (ПО), приближающихся к МНП с целью нарушения ее работы. Для условий Арктики такой сбой в работе чрезвычайно опасен, если учесть большую номенклатуру узлов и механизмов устьевого оборудования, находящихся вблизи грунта. Например, опорные конструкции, фонтанная арматура, превенторы, райзеры, устьевые скважины, клапана перекрытия труб от течи, электрокабели систем управления, гидрошланги и газопроводы превентора и т.д. Их разрушение составляет серьезную угрозу для МНП (Караев Р.Н. Оценка аварийности морских нефтегазовых сооружений. Журнал Морской вестник №3 (59). - 2016. - с. 85-90 [19]).
Поэтому защита такого подводного оборудования в рабочей зоне становится по существу национальной экологической и экономической проблемой.
Для решения вопросов охраны МНП создана большая номенклатура необитаемых подводных аппаратов (НПА) которые в той или иной степени соответствуют поставленным задачам.
Класс обитаемых автономных подводных аппаратов (ОАПА) в основном предназначен для обнаружения ПО с использованием оптических (или непосредственно визуальных) систем наблюдения. Однако уже в 70-х годах эксплуатация зарубежных аппаратов выявила их непригодность для больших глубин, наметилось разочарование в их эффективности. Интенсивность использования ОАПА для обслуживания МНП и, как следствие, их строительство резко сократилось.
Класс НПА представленный в основном автономными и телеуправляемыми аппаратами, наоборот, стремительно развивается, доказав свою предпочтительность. В эти же годы в подводных технологиях прочно утвердилось направление привязных (телеуправляемых по кабель-тросу) НПА. Этот класс аппаратов стремительно развивается в зарубежных и отечественных подводных технологиях, так как зарекомендовал себя в качестве надежного, безопасного и эффективного средства работы под водой.
Существующий парк телеуправляемых НПА (ТНПА) достаточно широк. Их оснащение комплектом подводных инструментов позволяет заменить работу водолазов-глубоководников, а использование с подводных лодок обеспечивает в морской практике решение основной задачи - погодоустойчивости.
Проектные организации обращают все большее внимание на данный класс НПА, которые могут обеспечить надежную эксплуатацию и охрану МНП в ледовых условиях.
Класс автономных НПА (АНПА) в основном ориентирован на исследовательские функции, наблюдение, инспектирование, ретрансляцию информации. Эти виды деятельности занимают довольно узкую нишу подводных работ. Их использование для совместных работ с МНП в условиях конкретной морской практики проблематично.
Работы по созданию многоцелевых АПА находятся на этапе исследования и далеки от реализации (А.А. Наумов, Ю.В. Матвиенко. Состояние и перспективы развития работ ИПМТ ДВО РАН. Интернет-источник- http://www.imtp.febras.ru/images/stories/konf/tpomo-4-3-7-oktjabrja-2011-goda/pdf/plenarnye-doklady.pdf [20]).
Отдельные образцы АНПА, выполняющих функции исследования и передачи информации по гидроакустическому (ГА) каналу (так называемые подводные платформы), находятся на этапе концептуальных решений
(А. Курносов. В одном лице - сапер и часовой. Статья в Российской газете «24 часа», №16. - 2016 [21]).
Некоторые АПН А представляют собой аппараты типа подводных планеров (глайдеров), например, типа «Глайдер - Т» и др. (В. Середин. Подводные планеры. Статья в Российской газете «24 часа», №9. - 2015 [22]), которые для использования в ледовых условиях непригодны по причине того, что в период эксплуатации, аппараты данного типа должны всплывать на свободную от ледовых образований водную поверхность для уточнения местонахождения аппарата или для передачи информации по радиосвязи.
Кроме того, недостаточна энергоемкость таких аппаратов для выполнения маневрирования вблизи МНП или для перемещения опасного несанкционированного предмета на безопасное расстояние посредством аппарата, отсутствие манипулятора и оперативной визуальной связи с оператором - все это делает практическую неприспособленность таких аппаратов для работы в ледовых условиях с использованием штатных механизмов МНП. Кроме того, спуск (подъем) таких аппаратов под лед с платформы практически не решен.
По ряду показателей для условий Арктики при наличии ледовых полей наиболее предпочтительными являются привязные ТНПА, обладающие манипуляторными устройствами, высокой степенью маневренности, и являющиеся многофункциональными и имеющие практически безграничное электропотребление. При этом двухсторонняя передача информации и команд управления по кабелю обеспечивается практически без помех. Спуско-подъемные операции с подобным классом аппаратов, как правило, осуществляется шахтным способом, исключая тем самым влияние погодных условий.
Известны также аналогичные ТНПА, имеющие практическое применение.
Например, мобильный комплекс подводно-технических работ (МКПТР), который включает ТНПА с манипуляторным устройством; ОПА; гидролокатор бокового обзора и который предназначен для осмотра и обнаружения объектов работы с манипуляторным устройством (А.Г. Храмов. Инновационные проекты ООО «Дайвтехносервис» для выполнения аварийно-спасательных водолазных и подводно-технических работ. В сборнике докладов Международной научно-практической конференции. - СПб.2013 - Интернет -источник https://elibrary.ru/item.asp?id=24362304 [23]). Однако, для работы в ледовых условиях, используемый в системе ТНПА практически непригоден.
Известная также система пассивной идентификации и мониторинга подводной обстановки содержит подводный робот, оснащенный гидроакустической станцией (ГАС), видеокамерами, тензометрическими датчиками; пассивным ГА маяком, размещенным на грунте.
Данная система предназначена для мониторинга подводной инфраструктуры МНП в ледовых условиях (Система пассивной идентификации и мониторинга подводной инфраструктуры нефтегазопромысловых и гидротехнических сооружений в осложненных арктических условиях. В сборнике материалов III-го Международного Форума «Арктика-настоящее и будущее». СПб. 2013 Интернет - источник http.//narfu.ru/upload//medialibrary/aac/sbornik-tezisov-samit_2014.pdf [24]). Недостатком системы является то, что она основана на базе зарубежных моделей подводных аппаратов и устройств.
Известный также мобильный комплекс инженерно-технических средств физической защиты для обеспечения охраны судов и портовых средств (МК ИТСФЗ) содержит ГАС; оптические системы; систему периметровой охранной сигнализации; систему нейтрализации (интернет источник - http://www.tetis-ks.ru/catalog/233/ [25]) и предназначен для охраны портовых средств.
Конструкции аналогов имеют традиционную комплектацию аппаратов поисковыми каналами, пути усовершенствования конструкции аппаратов, снижение массогабаритных характеристик.
Такой подход к проектированию позволяет охарактеризовать НПА как комплекс, то есть как совокупность (набор) поисковых каналов, составляющих одно целое.
Вместе с тем, составляющие комплекса находятся в информационных отношениях или связях друг с другом, что позволяет образовать определенную целостность, единство.
Такой подход обеспечивает создание системы, которая не прослеживается в существующих комплексах.
В качестве прототипа выбран комплекс инженерно-технических средств охраны МНП в части охраны территории со стороны моря (фиг. 2), аналогичной МНП «Приразломная» ([26]).
Комплекс содержит типовой набор технических средств для освещения подводной обстановки:
- ГАС кругового обзора в комплектации с донными антеннами;
- гидролокатор бокового обзора (ГБО);
- ТНПА.
Последние два средства размещены на надводном носителе (катере).
Назначение комплекса - «освещение» подводного пространства в районе МНП с целью обнаружения ПО, последующее опознавание и классификация средствами ГБО и подводного аппарата. При необходимости возможна нейтрализация обнаруженного ПО ГА средствами надводного носителя. В штормовых условиях эффективность маломерного надводного носителя (ГА средств) крайне низка.
В ледовых условиях катер находится на борту МНП и соответственно комплекс неработоспособен.
В качестве прототипа рассмотрены интеллектуальная сетевая система охраняемой территории [18] и комплекс инженерно - технических средств охраны МНП типа «Приразломная» [26].
Задачей настоящего изобретения является расширение функциональных возможностей системы подводной охраны нефтегазовой платформы в ледовых условиях путем повышение эксплуатационной надежности устройства для охраны водных рубежей.
Поставленная задача решается за счет того, что в интеллектуальной сетевой системе мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях, содержащей центральный пункт управления (ЦПУ) и группу технических средств обнаружения (ТСО), в состав ЦПУ входят первый радиомодем, работающий на радиочастоте первого радиоканала связи, коммуникационный модуль с возможностью связи с внешними устройствами с помощью сетевого интерфейса и ПЭВМ с графическим монитором, в состав каждого ТСО входит первый радиомодем, модуль обнаружения активности, процессор с модулем памяти, источник питания и датчики тревожной сигнализации (от одного до N), работающие на разных физических принципах, первые радиомодемы выполнены с возможностью приема-передачи информации между ЦПУ и группой ТСО, которые связаны между собой в первую одноранговую радиосеть, работающую на радиочастоте первого радиоканала связи и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи, в состав системы включена группа технических средств видеонаблюдения (ТСВ), содержащих малокадровые системы видеонаблюдения, выполненные с возможностью выделения предтревожной, тревожной и послетревожной видеоинформации, при этом каждое ТСВ содержит второй радиомодем, работающий на радиочастоте второго радиоканала связи для передачи видеоинформации на ЦПУ, в состав которого для приема видеоинформации дополнительно включен второй радиомодем, группа ТСВ и ЦПУ связаны между собой во вторую одноранговую радиосеть, работающую на радиочастоте второго радиоканала связи и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи, группа ТСО по количеству используемых типов датчиков тревожной сигнализации состоит из различной комбинации сейсмических, радиоволновых, инфракрасных, магнитометрических, радиолучевых и обрывных датчиков тревожной сигнализации, алгоритмы обработки информации, поступающей в ЦПУ от ТСО, выбираются с учетом физического принципа работы датчиков тревожной сигнализации, расположения их на местности, существующей оперативной обстановки на охраняемой территории и определенном направлении движения обнаруженного объекта в соответствии с решающими правилами «И», «ИЛИ», «2 из 3», алгоритмы обработки информации, поступающей в ЦПУ от ТСО, выбираются с возможностью комбинирования сигналов от датчиков тревожной сигнализации, работающих на разных физических принципах, а также с возможностью использования нейросетевых алгоритмов и алгоритмов нечеткой логики для интеллектуальной обработки информации в ЦПУ, ПЭВМ, входящая в состав ЦПУ, выполнена в виде автоматизированного рабочего места (АРМ) оператора, которое обеспечено архивной памятью, системой тревожного оповещения и необходимым комплектом программного обеспечения с возможностью отображения плана местности на экране графического монитора, обозначения на плане местности ТСО и ТСВ, а также с возможностью регистрации тревожных сигналов ТСО и видеоинформации, поступающей от ТСВ, включающей также комплекс подводных технических средств, включающий донные гидроакустические станции, размещенные вблизи платформы с образованием дальней зоны обнаружения, гидролокатор бокового обзора, телеуправляемый необитаемый подводный аппарат, в котором на дрейфующих вблизи платформы ледовых полях размещены радиобуи с навигационной аппаратурой ГЛОНАСС и гидроакустические станции, антенны которых посредством кабель-троса закреплены на внешней подвеске, причем на корпусе платформы по периметру установлены антенны высокочастотной бортовой гидроакустической станции, образуя защитную круговую ближнюю рабочую зону опознавания (классификации), обнаруженного в дальней зоне подводного объекта или несанкционированного предмета, нейтрализация которых осуществляется телеуправляемым необитаемым подводным аппаратом с манипулятором, размещенным в подводном спуско-подъемном устройстве платформы и наводимым на объект автоматически по сигналу бортовой гидроакустической станции или оператором, охранный модуль механизмов устьевого нефтегазового оборудования в рабочей зоне выполнен в виде подводного телевизионного комплекса, включаемого в работу по сигналу бортовой гидроакустической станции, дополнительно введено устройство для обнаружения и классификации приводняющегося объекта, содержащее гидролокатор, который содержит последовательно соединенные блок выбора порога и обнаружение эхосигналов, блок измерение амплитуд и времен обнаруженных эхосигналов, блок формирования классификационных признаков, блок принятия решения, и который через многоканальное приемное устройство соединен с процессором, соединенным с индикаторным блоком оператора, периодический генератор, включающий источник высоковольтных наносекундных импульсов, гиромагнитную линию с NiZn ферритом, фильтр высоких частот, излучающую и приемную антенны, выход которой соединен с соответствующим входом многоканального приемного устройства.
В предлагаемом техническом решении для увеличения площади ГА наблюдения и определения координат движущегося подо льдом в сторону МНП ПО, устанавливаются ГА буи на дрейфующих вблизи МНП ледовых полях аналогично известному способу размещения ГА (Зимовщиков на льдине сменят автоматы. Российская газета «24 часа» №16, 2017 [27]). При этом ледовые поля используются в качестве приборных платформ.
В настоящее время маршруты дрейфа ледовых полей изучены с большой точностью в течение длительного времени. В «надводной» части буя размещена навигационная аппаратура ГЛОНАСС, позволяющая определить его координаты относительно МНП. «Подледная» часть буя посредством кабель-троса соединяет (подвеска) антенну ГАС с аппаратурой «надводной» части буя. Аналогичные технические решения (всплывающие буи - аварийно-информационное устройство «Парис», В-600, В-603, морской аварийный радиобуй АРБ МКС «Афалина», аварийный ГА сигнализатор МГС-30, аварийная ГАС связи МГ-35) широко известны в системе ВМФ РФ (Средства оповещения об аварии обозначения места аварийной подводной лодки и связи с ее личным составом в книге О.М. Слесарев. Спасательные средства устройства и системы подводных лодок. Изд. «Нестор-История».-2012 г. [28]).
Построенная таким образом система позволяет создать информационную связь буев и МНП с образованием дальней зоны обнаружения (ДЗО), а гидролокатор бокового обзора МНП обеспечивает ближнюю рабочую зону (БРЗ), а также навести на обнаруженный несанкционированный ПО ТНПА. Совместная работа навигационного комплекса и подводных систем позволяет проследить трассировку несанкционированного ПО. Совокупность космического и надводного информационных полей образует определенную целостность, единство отдельных элементов охраны, которая характеризуется как система.
Дальнейшее сопровождение несанкционированного ПО основано на его опознании и классификации.
С этой целью на подводном участке корпуса МНП по его периметру размещены антенны высокочастотной ГАС. Поле антенны образует круговую БРЗ, где определяется тип несанкционированного ПО, его курс, координаты перемещения.
Нейтрализация несанкционированного ПО осуществляется ТНПА, оснащенным оптическими средствами и манипулятором с комплектом подводного инструмента.
Обслуживание ТНПА осуществляется спуско-подъемным устройством (СПУ), размещенным в подводной части МНП. Оперативная информация в реальном масштабе времени осуществляется в обоих направлениях посредством кабель-троса.
Управление СПУ (заполнение шахты контейнера, открытие люка, выход аппарата и т.п. действия) может быть выполнено как автоматически от ГА систем, так и по команде оператора.
В части охраны территории в береговых условиях система мониторинга аналогична прототипу [18]. При этом система осуществляет мониторинг охраняемой территории на открытой местности.
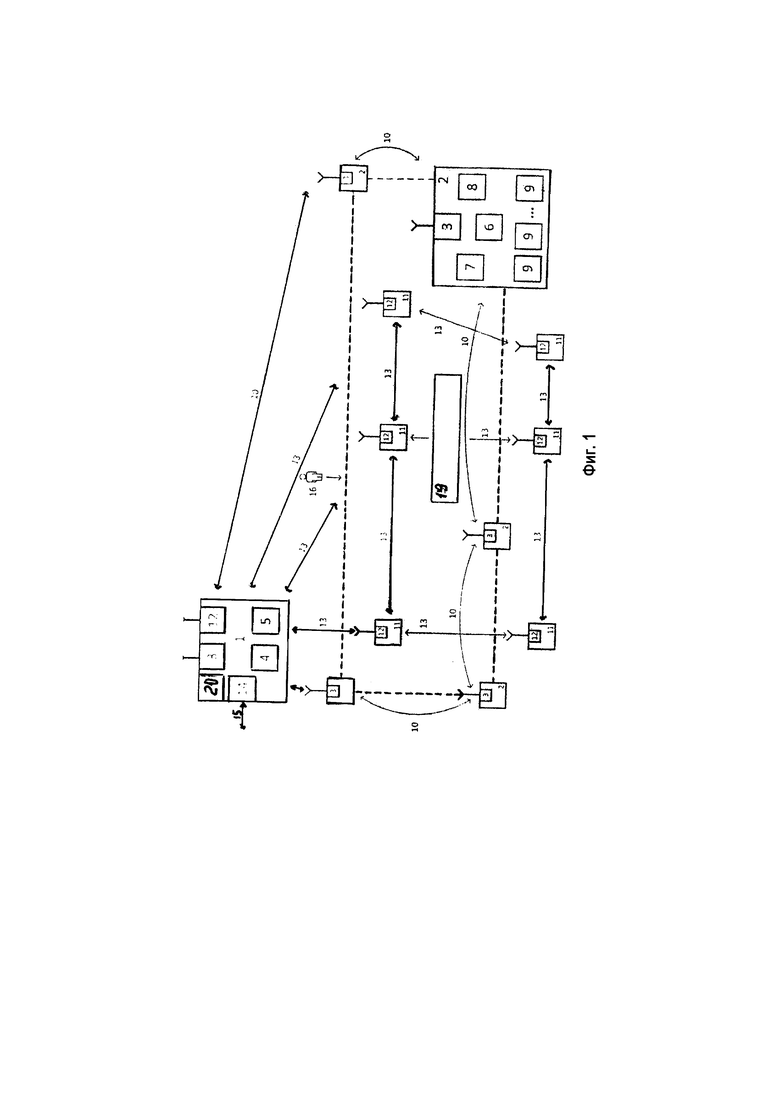
На фиг. 1 приведен пример структурной схемы системы для контроля периметра охраняемого объекта согласно прототипа при мониторинге береговой части МОХД.
На фиг. 2 приведен пример расположения зон обнаружения и видеонаблюдения системы применительно к периметру МОХД, расположенному на морской акватории.
На фиг. 1 введены обозначения: центральный пункт управления (ЦПУ) - 1, техническое средство обнаружения (ТСО) - 2, первый радиомодем - 3, персональная электронно-вычислительная машина (ПЭВМ) - 4, графический монитор - 5, модуль обнаружения активности - 6, процессор - 7, модуль памяти - 8, датчик тревожной сигнализации - 9, первый радиоканал связи - 10, техническое средство видеонаблюдения (ТСВ) - 11, второй радиомодем - 12, второй радиоканал связи - 13, коммуникационный модуль - 14, сетевой интерфейс - 15, человек-нарушитель - 16, зона обнаружения радиолучевого датчика - 17, зона наблюдения - 18, МОХД - 19, блок классификации 20 обнаруженного несанкционированного объекта. Пунктирной линией, для примера, на фиг. 1 обозначен периметр охраняемого объекта. Человек-нарушитель, изображенный на фиг. 1, условно проникает на охраняемую территорию в направлении, обозначенном стрелкой. Одно из ТСО 2 на фиг. 1 (в правом нижнем углу) изображено в большем масштабе, чтобы показать входящие в него компоненты.
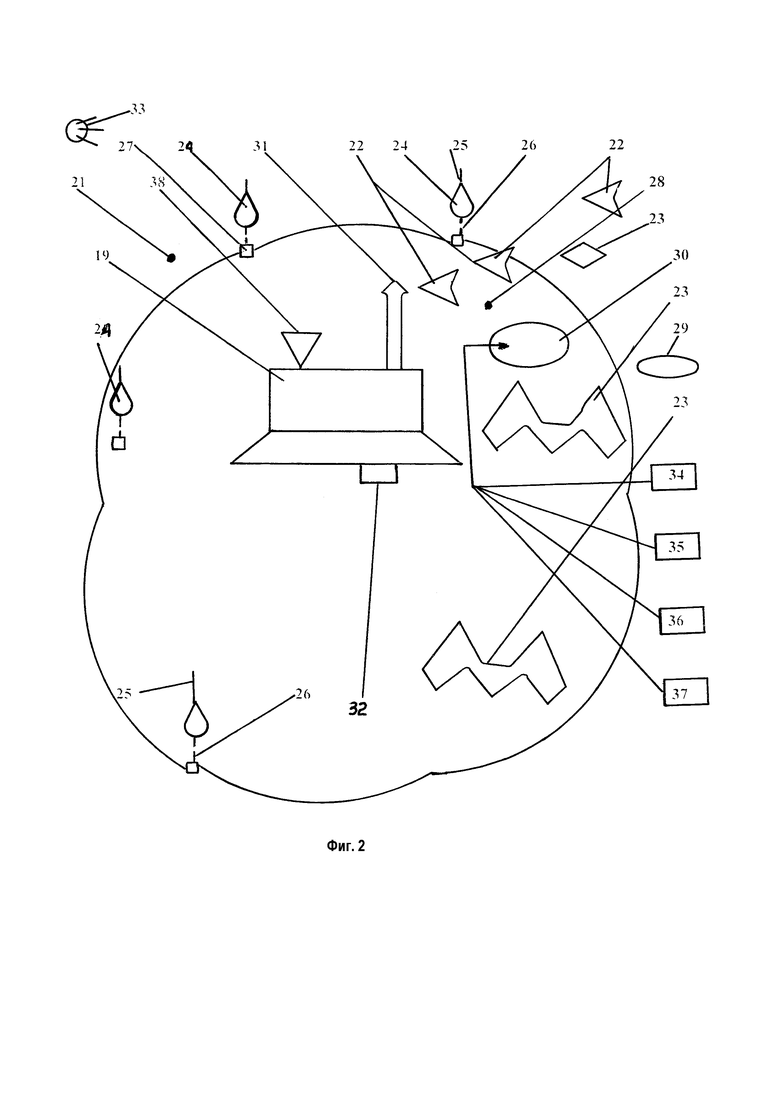
На фиг. 2 введены обозначения: МОХД - 19, дальняя зона обнаружения (ДЗО) - 21, подводный или надводный несанкционированный объект - 22, дрейфующие ледовые поля - 23, радиобуй - 24, РНС «ГЛОНАСС» - 25, кабель - трос подвески антенны ГАС - 26, ГАС - 27, формирующая ДЗО, круговая ближняя рабочая зона (БРЗ) - 28, антенны бортовой высокочастотной ГАС - 29, ТНПА - 30, РЛС - 31, спуско-подъемное устройство - 32, навигационный спутник - 33, гиромагнитная линия 34, подводная телевизионная аппаратура 35, идентификатор 36 взрывчатых веществ, лазерный модуль 37, метеостанция 38.
Система согласно прототипу осуществляет мониторинг охраняемой территории на открытой местности. На фиг. 1 приведен пример расположения на охраняемой территории ТСО 2 и ТСВ 11, количество которых устанавливается исходя из размеров и конфигурации охраняемой территории. ТСО связаны между собой и с ЦПУ 1 посредством первого радиоканала связи 10, образуя первую одно ранговую радиосеть на частоте (433 МГц) первого радиоканала связи. ТСВ также связаны между собой и с ЦПУ 1 посредством второго радиоканала связи 13, образуя вторую одно ранговую радиосеть на частоте (868 МГц) второго радиоканалов связи. Принцип работы одно ранговых сетей общеизвестен и подробно описан, например, в патенте US №8710983.
В состав ЦПУ входят первый 3 и второй 12 радиомодемы, работающие, соответственно, на радиочастотах первого 10 и второго 13 радиоканалов связи, коммуникационный модуль 14 с возможностью связи с внешними устройствами (серверами, переносными пультами управления и т.п.) с помощью сетевого интерфейса 15 (сетей LAN, WAN или интерфейса Ethernet), а также ПЭВМ 4 с графическим монитором 5. ТСО выполнены с возможностью приема управляющей информации от ЦПУ, а также передачи тревожных сигналов на ЦПУ. ТСВ содержат малокадровые системы видеонаблюдения, выполненные с возможностью выделения предтревожной, тревожной и после тревожной видеоинформации, и обеспечивают прием управляющей информации от ЦПУ, а также передачу видеоинформации на ЦПУ. Все ТСО и ТСВ автоматически выполняют функцию ретрансляции передаваемых сообщений в рамках своих радиосетей. Используемые первая и вторая одно ранговые радиосети являются самоорганизующимися и выполнены с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи. Для обеспечения указанной передачи информации зоны радиообмена ТСО и зоны радиообмена ТСВ (фиг. 1) пересекаются в пространстве.
Принцип работы системы поясняется рисунками, изображенными на фиг. 1-2. При проникновении объекта (например, человека-нарушителя 16) на охраняемую территорию (стрелкой изображено направление его движения) соответствующим ТСО будет сформирован сигнал тревоги со «своим» номером (адресом) ТСО, который будет передаваться с помощью первого радиоканала связи 10 в ЦПУ. В случае использования ТСВ в виде пунктов видеоконтроля малокадровой мобильной системы видеонаблюдения, каждый из них передает в ЦПУ по второму радиоканалу связи 13 видеоинформацию о продвижении человека-нарушителя 16 с номером (адресом) соответствующего пункта видеоконтроля. Таким образом, ЦПУ фиксирует факт пересечения человеком-нарушителем границы охраняемой территории и получает достоверную информацию о последовательном продвижении человека-нарушителя в зоне мониторинга с указанием номеров (адресов) ТСО, временных моментов пересечения им зон обнаружения, а также фиксирует видеоинформацию по его продвижению.
В состав каждого ТСО 2 входит первый радиомодем 3, модуль обнаружения активности 6, процессор 7 с модулем памяти 8, источник питания (на фиг. 1 не показан) и датчики тревожной сигнализации 9 (от одного до n), работающие на разных физических принципах. Процессор 7 предназначен для обработки информации, поступающей от датчиков тревожной сигнализации 9, и формирования маршрутов передачи информации на ЦПУ 1. Модуль памяти 8 предназначен для хранения алгоритмов обработки и маршрутизации. Источники питания могут быть выполнены в виде аккумуляторных или солнечных батарей, а также в виде других альтернативных источников электропитания. ТСО 2 могут включать в свой состав сейсмические датчики тревожной сигнализации, радиоволновые датчики тревожной сигнализации, пассивные инфракрасные датчики тревожной сигнализации, магнитометрические датчики тревожной сигнализации, однопозиционные или двухпозиционные радиолучевые датчики тревожной сигнализации и обрывные датчики тревожной сигнализации. Возможны комбинации в ТСО датчиков тревожной сигнализации с различными физическими принципами действия.
ТСО могут быть настроены на обнаружение человека-нарушителя, или на обнаружение более крупных объектов, таких как легковые и грузовые автомобили, гусеничный и гужевой транспорт. Для осуществления скрытности (или маскируемости) работы системы рекомендуется в качестве ТСО использовать сейсмические или радиоволновые датчики тревожной сигнализации. Такими датчиками могут быть точечные сейсмические датчики БСК-С (БАЖК.425139.010) и радиоволновые датчики БСК-РВП (БАЖК.425142.058). Сейсмические датчики тревожной сигнализации, предлагаемые для использования в системе, обеспечивают классификацию обнаруженного объекта («одиночный», «группа», «транспортное средство») и определяют направление движения («к нам», «от нас»). Радиоволновые датчики тревожной сигнализации БСК-РВД (БАЖК.425142.048) обеспечивают функционирование на местности со сложным ландшафтом (холмы, овраги, каменистые террасы, лесистая, болотистая и поросшая густой растительностью местность, ледяные торосы, песчаные барханы и т.п.). Для осуществления контроля проноса человеком-нарушителем на территорию охраняемого объекта металлических предметов (например, огнестрельного и холодного оружия) в качестве ТСО могут быть использованы магнитометрические датчики тревожной сигнализации, обеспечивающие формирование сигналов наличия металлического оружия («вооружен» или «не вооружен»). Такими датчиками могут быть магнитометрические датчики БСК-МСО (БАЖК.425113.005). Для создания быстро развертываемых мест временного базирования людей, транспортных средств, материальных ценностей на протяженных ровных участках местности могут использоваться радиолучевые однопозиционные (БСК-РЛО, БЖАК.425142.050) и двухпозиционные (БСК-РЛД, БЖАК.425142.051) датчики тревожной сигнализации. На труднодоступных участках местности (дороги, лесные тропы, горные перевалы, ущелья, овраги и т.п.) могут использоваться инфракрасные пассивные датчики тревожной сигнализации БСК-ИК (БЖАК.425152.003). Для обнаружения проникновения посторонних лиц на охраняемую территорию, блокирования оконных и дверных проемов, различного рода заборов, стен и т.п. могут применяться обрывные датчики тревожной сигнализации БСК-O (БЖАК.468173.026). Все указанные датчики тревожной сигнализации подробно описаны в материалах на интернет-сайте www.nikiret.ru.
Обработка информации, принимаемой от ТСО, осуществляется в ЦПУ по выбранному алгоритму по критериям максимальной вероятности обнаружения или минимального количества ложных тревог и учитывающему физический принцип работы датчиков тревожной сигнализации, расположение их на местности, существующую оперативную обстановку на охраняемой территории, а также определенное направление движения обнаруженного объекта. Алгоритмы обработки информации выбираются в соответствии с решающими правилами «И», «ИЛИ», «2 из 3» в зависимости от тактических задач. Обработка информации может выбираться с возможностью комбинирования сигналов от датчиков тревожной сигнализации, работающих на разных физических принципах, а также с возможностью использования более сложных интеллектуальных алгоритмов обработки сигналов: нейросетевых алгоритмов и алгоритмов нечеткой логики (Fuzzy Logic). Алгоритм нечеткой логики при обработке сигналов является общеизвестным алгоритмом и используется, например, в радиолучевых датчиках тревожной сигнализации серии ERMO 482Х PRO фирмы CIAS (www.cias-russia.ru). Нейросетевой алгоритм также является общеизвестным, который описан, например, в статье А.Ю. Зенова и Н.В. Мясниковой «Применение нейросетевых алгоритмов в системах охраны периметра» / Известия высших учебных заведений. Поволжский район. Технические науки. - 2012. - №3(23) - с. 15-24. Использование этих интеллектуальных алгоритмов позволит существенно улучшить тактико-технические характеристики предлагаемой системы в части более надежного обнаружения нарушителей и повышения ее помехоустойчивости.
Информационный канал обмена информации в системе представлен двумя радиоканалами связи. Первый 10 и второй 13 радиоканалы связи предлагается использовать в разных частотных диапазонах (например, первый радиоканал связи на радиочастоте 433 МГц, а второй радиоканал связи - на радиочастоте 868 МГц). Использование двух разделенных по радиочастотам радиоканалов связи позволяет разгрузить информационный канал (сеть) обмена информации в системе, разделив передачу тревожных сообщений и передачу видеоинформации на две независимые друг от друга первую и вторую одно ранговые радиосети.
В зоне мониторинга в качестве ТСВ используются пункты видеоконтроля малокадровой мобильной системы видеонаблюдения, которая описана в патенте RU №2504015, МПК G08B 25/08, опубл. 10.01.2014 г. Система видеонаблюдения Кипарис-Видео (БАЖК.463349.003), выполненная в соответствии с указанным патентом, а также аналогичная система видеонаблюдения Камуфляж-Видео (БАЖК.463349.005) представлены в материалах на интернет-сайте www.nikiret.ru.
ТСВ работают следующим образом. По сигналам тревоги в автоматическом режиме или по команде оператора с ЦПУ включаются видеокамеры этих пунктов видеоконтроля, которые предназначены для передачи кадров видеоизображения в зоне расположения видеокамер на ЦПУ. Переданная видеоинформация необходима для принятия решения по возникшей угрозе. Пункты видеоконтроля малокадровой мобильной системы видеонаблюдения могут использоваться в двух вариантах: с зонами наблюдения, направленными в одну сторону и с зонами наблюдения, направленными в разные стороны.
В известной системе имеется возможность отключения некоторых ТСО для обеспечения нахождения их в «спящем» состоянии (режиме sleep), что позволяет в свою очередь снизить общее энергопотребление системы в дежурном режиме, а также при проведении, например, ремонтных или регламентных работ. Для перевода из «спящего» состояния в активный режим функционирования в каждом ТСО имеется модуль обнаружения активности 6, который «пробуждает» ТСО из «спящего» состояния при возникновении модуляции сигналов в зонах обнаружения датчиков тревожной сигнализации.
Интеллектуальность известной системы обеспечивается тем, что в ней могут использоваться следующие возможности:
- учет погодных условий с целью корректировки алгоритмов обработки (например, при дожде, граде, сильном ветре, тумане и т.п.);
- опрос состояния соседних ТСО с целью принятия окончательного решения о тревожной ситуации на определенном участке рубежа охраны (например, при грозе или сильных порывах ветра);
- накопление и хранение алгоритмов маршрутизации для использования их в возможных вариантах организации радиосетей в будущем;
- накопление данных для учета их при анализе состояния ТСО и ТСВ при возникновении аналогичных ситуаций в будущем;
- анализ предтревожной, тревожной и после тревожной видеоинформации, поступающей от ТСВ;
- использование спящего режима (sleep) для экономии электроэнергии системой;
- распределение и перераспределение вычислительных ресурсов между ЦПУ, ТСО и ТСВ;
- использование информации о расстоянии до места нарушения, параметрах объекта нарушения, скорости и направлении его движения через охраняемый рубеж для идентификации объекта нарушения по классам (человек, мелкое животное или птица, транспортное средство), что дает дополнительную информацию службе охраны для задержания нарушителя;
- использование алгоритмов обработки с комбинированием сигналов от датчиков тревожной сигнализации, работающих на разных физических принципах;
- использование нейросетевых алгоритмов и алгоритмов нечеткой логики для интеллектуальной обработки информации в ЦПУ.
ПЭВМ 4, входящая в состав ЦПУ 1, выполнена в виде автоматизированного рабочего места (АРМ) оператора, которое обеспечено архивной памятью, системой тревожного оповещения и необходимым комплектом программного обеспечения с возможностью отображения плана местности на экране графического монитора, обозначения на плане местности ТСО и ТСВ, а также с возможностью регистрации тревожных сигналов ТСО и видеоинформации, поступающей от ТСВ. Просмотр видеоинформации осуществляется на графическом мониторе 5 ПЭВМ. Тревоги с адресами (номерами) ТСО и полученная видеоинформация сохраняются в памяти ПЭВМ.
Каждое из ТСО и ТСВ в системе может включать в себя встроенный приемник GPS, который может использоваться для привязки составных частей системы к локальной или географической системе координат.
Учет погодных условий обеспечивается получением необходимой информации от метеостанции 38. Для морских ОХД метеостанция устанавливается непосредственно на ОХД, информационные выходы которой соединены с информационными входами ЦПУ.
При ограничении дальности действия радиоканалов связи допускается использование соответствующих ретрансляторов.
В отличие от прототипа в интеллектуальной системе мониторинга охраняемой территории дополнительно на дрейфующих вблизи платформы ледовых полях размещены радиобуи с навигационной аппаратурой ГЛОНАСС и гидроакустические станции, антенны которых посредством кабель-троса закреплены на внешней подвеске, причем на корпусе платформы по периметру установлены антенны высокочастотной бортовой гидроакустической станции, образуя защитную круговую ближнюю рабочую зону опознавания (классификации), обнаруженного в дальней зоне подводного объекта или несанкционированного предмета, нейтрализация которых осуществляется телеуправляемым необитаемым подводным аппаратом с манипулятором, размещенным в подводном спуско-подъемном устройстве платформы и наводимым на объект автоматически по сигналу бортовой гидроакустической станции или оператором, охранный модуль механизмов устьевого нефтегазового оборудования в рабочей зоне выполнен в виде подводного телевизионного комплекса, включаемого в работу по сигналу бортовой гидроакустической станции, дополнительно введено устройство для обнаружения и классификации приводняющегося объекта, содержащее гидролокатор, который через многоканальное приемное устройство, через процессор, в который входят последовательно соединенные блок выбора порога и обнаружение эхосигналов, блок измерение амплитуд и времен обнаруженных эхосигналов, блок формирования классификационных признаков, блок принятия решения, и через индикатор соединен с блоком оператора, периодический генератор, включающий источник высоковольтных наносекундных импульсов, гиромагнитную линию с NiZn ферритом, фильтр высоких частот, излучающую и приемную антенны, выход которой соединен с соответствующим входом многоканального приемного устройства, идентификатор взрывчатых веществ, РЛС сантиметрово-миллиметрового диапазона, лазерный модуль.
В гиромагнитной линии 32 с NiZn ферритом, посредством периодического генератора радиоимпульсов, в котором использован источник высоковольтных наносекундных импульсов типа СИНУС (Mesyats G.F., Korovin S.D., Gunin A.V. et al. Repetitively pulsed high-current accelerators with transformer charging of forming lines//Laser and Particle Beams. 2003. Vol. 21, №2, p. 197-209), возбуждаются высокочастотные колебания (ВЧ) с мощностью в несколько сотен МВт. Возбуждение ВЧ в нелинейных линиях происходит за счет неустойчивости крутого фронта ударной электромагнитной волны с синхронной с ним ВЧ волне. Неустойчивость фронта обусловлена дисперсией нелинейной линии, которая бывает двух типов: пространственная (Белянцев A.M., Дубнев А.И., Климин С.Л. и др. Генерация радиоимпульсов ударной электромагнитной волной в линии передачи с ферритом // ЖТФ. 1995, т. 65, с. 132-142) и временная (Фрейдман Г.И. О зависимости структуры ударных волн в двухпроводных линиях передачи от дисперсионной характеристики системы в линейном приближении. // Изв. Вузов. Радиофизика. 1963, т. 6, с. 536-550).
Возможность прямого эффективного преобразования видеоимпульса в радиоимпульс была продемонстрирована для линейной линии с пространственной дисперсией (Seddom N., Spiking C.R., Dolan J.E. RF pulse formation in nonlinear transmission lines//IЕЕЕ Pulsed Power Plasma Science Conference. 2007, p. 678-681).
Автономный мобильный самоходный подводный аппарат содержит движительный модуль, соединенный с модулем навигации и управления движением, который содержит бортовой вычислитель, модемы радиосвязи и гидроакустического канала связи, аппаратурный модуль, содержащий идентификатор взрывчатых веществ в твердом и газообразном состоянии, гидролокатор кругового обзора, блок сейсмических измерений, многолучевой эхолот, подводную телевизионную аппаратуру, автономный погружаемый гамма-спектрометр, радиолокационную станцию, измерители скорости звука, скорости и направления течения, модуль обнаружения и классификации надводных и подводных объектов в охранной зоне. Адаптивный закон управления, построенный по методу Back stepping обеспечивает высокую точность движения по исполнительной траектории после практически любых боковых отклонений.
Подводная телевизионная аппаратура обеспечивает малокадровую телевизионную съемку в черно-белом и цветном изображении донного объекта с дальностью видения не менее 0,7 Zb. Разрешающая способность обеспечивает возможность обнаружения объекта с минимальным размером 20 мм при минимальном контрасте ≈0,2 с.
Идентификатор взрывчатых веществ 36 обеспечивает обнаружение взрывчатого азотосодержащего вещества типа гексоген от 1 кг, отравляющего серосодержащего вещества типа иприт от 1 кг, гаммоизлучающих радионуклеидов с объемной активностью растворимых в морской воде от 500 Бк/м, куб для цезия 137 за время не более 10 мин с дополнительной функцией гамма - спектрометра, позволяющей идентифицировать радиоактивные вещества, содержащиеся в поверхностном 10-ти см слое донных отложений, безазотистых взрывчатых веществ.
Обнаружение и классификации надводных и подводных объектов, воздушных и наземных транспортных средств, включая малогабаритные морские аппараты типа «SONOBOT», дельтопланы и квадрокоптеры, наземные механические транспортные модели, в охранной зоне осуществляется посредством периодического генератора, содержащего источник высоковольтных наносекундных импульсов, гиромагнитную линию с NiZn ферритом, фильтр высоких частот, излучающую и приемную антенны, выход которой соединен с соответствующим входом многоканального приемного устройства, РЛС сантиметрово-миллиметрового диапазона, лазерным модулем, ГАС.
Лазерный модуль 35 содержит лазерный сканер типа Leica ALS 70-НР, который представляет собой сканер, и который работает в ближнем ИК диапазоне (1064 нм) и предназначен для определения пространственного положения точек отражения от водной поверхности и обеспечивает возможность работы в любое время года днем и ночью в простых метеоусловиях при высотах аэросъемки 300-3500 м, а также лазерный батиметр типа HawkEye 11 компании АНАВ, который работает в зеленом диапазоне (532 нм) и предназначен для определения пространственного положения точек отражения от дна водоема и позволяет одновременно получать как батиметрические, так и топографические данные на прибрежную территорию и принцип действия которого основан на использовании двух лазеров в ближнем ИК диапазоне (1065 нм) для определения пространственного положения точек отражения от водной поверхности и в зеленом диапазоне (532 нм) для определения пространственного положения точек отражения от дна водоема.
Метеостанция 38 представляет собой ультразвуковаю метеостанцию «Weather station» модель 200 WX - IР×7 фирмы «AIRMAR Technology Corporation)) - атмосферное давление, температура воздуха, скорость и направление ветра.
РЛС 30 представляет собой станцию сантиметрово-миллиметрового диапазона.
Чтобы продемонстрировать отличительные особенности заявляемого технического решения, в части отличительных признаков, в качестве примера, не имеющего какого-либо ограничительного характера, описан предпочтительный вариант его реализации.
Принцип действия системы заключается в следующем.
На дрейфующих относительно МНП 19 ледовых полях 23 размещены радиобуи 24. На буях 24 установлена навигационная аппаратура ГЛОНАС 25. На буе 23 посредством кабель-троса с подвеской 26 закреплена антенна ГАС 27. Ее работа образует ДЗО 21, где обнаруживается ПО 22, перемещающийся подо льдом. Координаты ПО, скорость, трассировка отслеживаются взаимосвязью радио и ГА каналов и передаются оператору МНП.
Для опознавания и классификации обнаруженного несанкционированного ПО 22, в случае появления его в БРЗ 28, на МНП 19 установлена высокочастотная ГАС 27, бортовые антенны 29, которых закреплены на корпусе МНП 19. Для нейтрализации ПО 22 на него наводится ТНПА 31 (автоматически по сигналу и координатам бортовой высокочастотной гидроакустической станции 27 или оператором), оснащенный манипуляторным устройством и рабочим инструментом.
Классификация объектов с использованием оценки радиальной протяженности известна достаточно давно (Фридман А. «Изображение формы тела с помощью звуколокационной или радиолокационной системы», Зарубежная радиоэлектроника, 1963 г., №8, стр. 43-64). Механизм формирования отраженного сигнала от объекта с конечной протяженности рассмотрен на стр. 48 А.Н. Яковлев, Г.П. Каблов «Гидролокаторы ближнего действия». - Л.: Судостроение,. 1983 г., где приведены принципы формирования тонкой структуры эхосигнала. Амплитуда огибающей каждого эхосигнала пропорциональна величине площади нормали относительно направления излучения, поэтому длительность эхосигнала от воздушной каверны будет больше длительности эхосигнала от корпуса объекта (t2-t1)>(t4-t3). Методы оценки временной протяженности эхосигналов подробно изложены в монографии Б.Н. Митяшев «Определение временного положения импульсов при наличии помех». - М.: Сов. Радио, 1962 г.
Известны также аналогичные технические решения обнаружения и классификации подводных объектов, посредством гидроакустических средств: патенты RU №2460088 С1, 27.08.2012. RU №2529441 С1, 27.09.2014. RU №2528556 С1, 20.09.2014. RU №2465618 С1, 27.10.2012. RU №2461020 С1, 10.09.2012. US №5438552 А1, 01.08.1995, RU №2602759 С1, 20.11.2016.
Модуль 20 может быть реализован на основе современной универсальной ЭВМ, обладающей способностью работать в реальном времени, возможностью перехода с одной задачи на другую, наличием гибкой адресации к памяти, большой скоростью обработки данных (Ю.А. Корякин, С.А. Смирнов, Г.В. Яковлев. Корабельная гидроакустическая техника, СПб., изд. «Наука», 2004 г., стр. 284) и содержит блок формирования спектральных портретов несанкционированных объектов, таких как наземные транспортные средства, воздушные, надводные и подводные суда.
Классификация обнаруженного несанкционированного подводного объекта выполняется в модуле 20 по сигналам, полученным от ГАС 27, гиромагнитной линии 34, подводной телевизионной аппаратуры 35, идентификатора 36 взрывчатых веществ, лазерного модуля 37, метеостанции 38. При обнаружении воздушных объектов используют сигналы, полученные от РЛС 30.
База «спектральных портретов» несанкционированных объектов формируется заранее с для различных скоростей потенциальных несанкционированных объектов при различных погодных условий с учетом собственных помех, создаваемых МХОД (агрегаты, аппаратура). По команде управления «режим обнаружения» из базы «спектральных портретов» поступает «спектральный портрет» обнаруженного несанкционированного объекта. Вычисляется разностный спектр мощности (спектр сигнала объекта). Разностный спектр мощности передается в блок обнаружения дискретных составляющих для выработки порога обнаружения (A.M. Тюрин. Введение в теорию статистических методов в гидроакустике, изд. Л., 1963 г., стр. 127-128). Все превысившие порог дискретные составляющие передаются в блок классификации для выработки классификационных признаков по спектру сигнала. Результаты классификации по спектральным признакам передаются в блок системы отображения и управления.
В гиромагнитной линии 32 с NiZn ферритом, посредством периодического генератора радиоимпульсов, в котором использован источник высоковольтных наносекундных импульсов типа СИНУС (Mesyats G.F., Korovin S.D., Gunin A.V. et al. Repetitively pulsed high-current accelerators with transformer charging of forming lines // Laser and Particle Beams. 2003.Vol. 21, №2, p.197-209), возбуждаются высокочастотные колебания (ВЧ) с мощностью в несколько сотен МВт. Возбуждение ВЧ в нелинейных линиях происходит за счет неустойчивости крутого фронта ударной электромагнитной волны с синхронной с ним ВЧ волне. Неустойчивость фронта обусловлена дисперсией нелинейной линии, которая бывает двух типов: пространственная (Белянцев A.M., Дубнев А.И., Климин С.Л. и др. Генерация радиоимпульсов ударной электромагнитной волной в линии передачи с ферритом // ЖТФ. 1995, т. 65, с. 132-142) и временная (Фрейдман Г.И. О зависимости структуры ударных волн в двухпроводных линиях передачи от дисперсионной характеристики системы в линейном приближении. // Изв. Вузов. Радиофизика. 1963, т. 6, с. 536-550).
Возможность прямого эффективного преобразования видеоимпульса в радиоимпульс была продемонстрирована для линейной линии с пространственной дисперсией (Seddom N., Spiking C.R., Dolan J.E. RF pulse formation in nonlinear transmission lines // IEEE Pulsed Power Plasma Science Conference. 2007, p. 678-681).
ТНПА 31 размещен в СПУ 32, закрепленным в виде подводного бокса в подводной части МНП 19. Механизмы СПУ могут управляться автоматически по сигналам бортовой ГАС 26 или оператором.
Визуальное наблюдение за отдельными узлами механизмами устьевого нефтегазового оборудования выполнено в виде автономного подводного телевизионного комплекса.
Метеостанция 36 представляет собой ультразвуковаю метеостанцию «Weather station» модель 200 WX - IР×7 фирмы «AIRMAR Technology Corporation)) - атмосферное давление, температура воздуха, скорость и направление ветра.
«BOSA LIТЕ» - спектральный диапазон 1525-1564 нм-sphotonics.ru>Каталог>Анализаторы оптического спектра 
Жидкостный сцинтилляционный анализатор с лазерным сектральным калибровочным позиционированием на базе флуоресцентного спектрофотометра
Cyber Leninka. ru>article…analizator…spektralnym…ha
Гравиметр - диапазон измерений от 9,76 до 9,84 м/с
Магнитометр - магнитная съемка от 20000 до 100000Тл.
Положительный эффект предлагаемого изобретения
1. Увеличение зоны дальнего обнаружения ПО.
2. Решение задач опознавания и классификации ПО в БРЗ МНП.
3. Совместное (взаимосвязанное) использование космического, радио, ГА каналов, позволяющих обеспечить оперативный мониторинг ПО в реальном масштабе времени.
4. Использование ТНПА подо льдом посредством использования осушаемого подводного СПУ шахтного типа.
5. Использование подводного аппарата для эвакуации обнаруженного несанкционированного предмета в устьевой зоне МНП.
6. Автоматическое наблюдение за узлами и механизмами подводного нефтегазового оборудования посредством системы подводного телевизионного оборудования.
7. Создание системы охраны на основе поисковых ГА оптических систем и подводного аппарата с манипулятором.
Введенные в известную систему дополнительные признаки позволяют придать предлагаемой системе новые существенные свойства.
Источники информации.
1. Патент RU №2150123, 2000.
2. Патент RU №2256196, 2005.
3. Авторское свидетельство SU №1819024, 2000.
4. Патент RU №2375755, 2009.
5. Патент RU №2364883 С1, 20.08.2009.
6. Патент RU №79678 U1, 27.03.2011.
7. Патент RU №2271551 С2, 10.03.2006.
8. Патент US №5646907 А1, 08.07.1997.
9. Патент US №5481505 А1, 02.01.1996.
10. Патент US №5305286 А1,19.04.1994.
11. Заявка US №200990201763 А1, 13.08.2009.
12. Заявка WO №2008/093088 А2, 07.08.2008.
13. Патент GB №2238121 А, 13.08.2009.
14. Патент RU №2568781 С2, 20.11.2015.
15. Патент RU №129283 U1, 2013
16. Патент RU №2427039 С1, 20.08.2011.
17. Патент US №8710983 А, 2014.
18. Патент RU №2629521 С1, 29.08.2017.
19. Караев Р.Н. Оценка аварийности морских нефтегазовых сооружений. Журнал Морской вестник №3 (59). - 2016. - с. 85-90.
20. Интернет-источник - http://www.imtp.febras.ru/images/stories/konf/tpomo-4-3-7-oktjabrja-2011-goda/pdf/plenarnye-doklady.pdf.
21. А. Курносов, В одном лице - сапер и часовой. Статья в Российской газете « 24 часа» №16. - 2016.
22. В. Середин. Подводные планеры Статья в Российской газете «24 часа» №9. - 2015.
23. А.Г. Храмов. Инновационные проекты ООО «Дайвтехносервис» для выполнения аварийно-спасательных водолазных и подводно-технических работ. В сборнике докладов Международной научно-практической конференции. - СПб.2013 - Интернет-источник https://elibrary.ru/item.asp?id=24362304.
24. Система пассивной идентификации и мониторинга подводной инфраструктуры нефтегазопромысловых и гидротехнических сооружений в осложненных арктических условиях. В сборнике материалов III-го Международного Форума «Арктика-настоящее и будущее. СПб. 2013 Интернет-источник - http://narfu.ru/upload/medialibrary/aac/sbornik-tezisov-samit_2014.pdf. Предлагаемая концепция системы основана на базе зарубежных моделей подводных аппаратов и устройств.
25. Интернет источник - http://www.tetis-ks.ru/catalog/233/.
26. Морская платформа «Приразломная» - https://docviewer.yandex.ru/view/58042574/?*=XQD4Q62U41Q58yaCOSXx8tMLCWp7InVybCI6I mh0dHA6Ly9zaGVsZiluZWZ0LmdhenByb20ucnUvZC9ibG9ja29udGhlbWFpbnBhZ2UvMDQvNC9 wcmV6ZW50YXRz.
27. Зимовщиков на льдине сменят автоматы. Российская газета «24 часа» №16, 2017.
28. Средства оповещения об аварии обозначения места аварийной подводной лодки и связи с ее личным составом в книге О.М. Слесарев. Спасательные средства устройства и системы подводных лодок. изд. «Нестор-История». - 2012.
| название | год | авторы | номер документа |
|---|---|---|---|
| Интеллектуальная сетевая система мониторинга охраняемой территории | 2016 |
|
RU2629521C1 |
| Беспроводная самоорганизующаяся сетевая система мониторинга охраняемой территории | 2016 |
|
RU2620239C1 |
| Интеллектуальная сеть технических средств обнаружения с возможностью образования виртуальных средств обнаружения для комбинирования тревожных сообщений | 2016 |
|
RU2637400C1 |
| Интеллектуальная сеть технических средств обнаружения с возможностью функционирования в среде big data для контроля периметров и территорий объектов | 2018 |
|
RU2682013C1 |
| Комбинированный комплекс физической защиты объектов, территорий и прилегающих акваторий с автоматизацией процессов охраны для сокращения численности людских ресурсов по его обслуживанию | 2021 |
|
RU2792588C1 |
| МАЛОКАДРОВАЯ МОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ И ОХРАННОЙ СИГНАЛИЗАЦИИ | 2019 |
|
RU2725708C1 |
| Малообслуживаемая система физической защиты объектов | 2018 |
|
RU2708509C1 |
| Интегрированная система безопасности на основе автоматизированных функциональных систем и подсистем | 2022 |
|
RU2794559C1 |
| Способ комбинирования технических средств обнаружения для охраны периметров и территорий объектов | 2018 |
|
RU2697622C1 |
| Сетевая система видеонаблюдения с возможностью контроля поведенческих факторов и биометрических параметров объектов наблюдения | 2019 |
|
RU2731032C1 |
Изобретение относится к области охранной сигнализации. Технический результат заключается в расширении арсенала средств того же назначения. Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях содержит центральный пункт управления (ЦПУ) и группу технических средств обнаружения (ТСО), в состав ЦПУ входят первый радиомодем, работающий на радиочастоте первого радиоканала связи, коммуникационный модуль с возможностью связи с внешними устройствами с помощью сетевого интерфейса и ПЭВМ с графическим монитором, в состав каждого ТСО входит первый радиомодем, модуль обнаружения активности, процессор с модулем памяти, источник питания и датчики тревожной сигнализации. 4 з.п. ф-лы, 2 ил.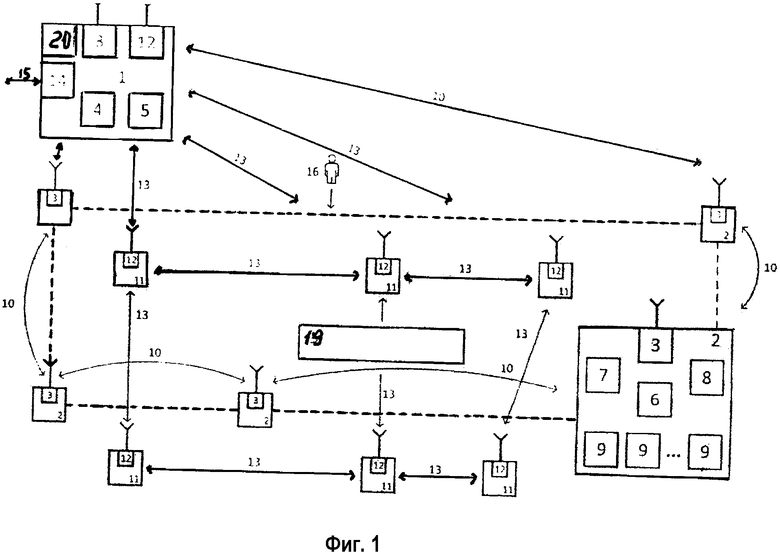
1. Интеллектуальная сетевая система мониторинга охраняемой территории нефтегазовой платформы в ледовых условиях, содержащая центральный пункт управления (ЦПУ) и группу технических средств обнаружения (ТСО), в состав ЦПУ входят первый радиомодем, работающий на радиочастоте первого радиоканала связи, коммуникационный модуль с возможностью связи с внешними устройствами с помощью сетевого интерфейса и ПЭВМ с графическим монитором, в состав каждого ТСО входит первый радиомодем, модуль обнаружения активности, процессор с модулем памяти, источник питания и датчики тревожной сигнализации от одного до N, работающие на разных физических принципах, первые радиомодемы выполнены с возможностью приема-передачи информации между ЦПУ и группой ТСО, которые связаны между собой в первую одноранговую радиосеть, работающую на радиочастоте первого радиоканала связи и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи, в состав системы включена группа технических средств видеонаблюдения (ТСВ), содержащих малокадровые системы видеонаблюдения, выполненные с возможностью выделения предтревожной, тревожной и послетревожной видеоинформации, при этом каждое ТСВ содержит второй радиомодем, работающий на радиочастоте второго радиоканала связи для передачи видеоинформации на ЦПУ, в состав которого для приема видеоинформации дополнительно включен второй радиомодем, группа ТСВ и ЦПУ связаны между собой во вторую одноранговую радиосеть, работающую на радиочастоте второго радиоканала связи и выполненную с возможностью автоматической перестройки маршрутов передачи информации по критерию наилучшего качества радиосвязи, группа ТСО по количеству используемых типов датчиков тревожной сигнализации состоит из различной комбинации сейсмических, радиоволновых, инфракрасных, магнитометрических, радиолучевых и обрывных датчиков тревожной сигнализации, алгоритмы обработки информации, поступающей в ЦПУ от ТСО, выбирают с учетом физического принципа работы датчиков тревожной сигнализации, расположения их на местности, существующей оперативной обстановки на охраняемой территории и определенном направлении движения обнаруженного объекта в соответствии с решающими правилами «И», «ИЛИ», «2 из 3», алгоритмы обработки информации, поступающей в ЦПУ от ТСО, выбираются с возможностью комбинирования сигналов от датчиков тревожной сигнализации, работающих на разных физических принципах, а также с возможностью использования нейросетевых алгоритмов и алгоритмов нечеткой логики для интеллектуальной обработки информации в ЦПУ, ПЭВМ, входящая в состав ЦПУ, выполнена в виде автоматизированного рабочего места (АРМ) оператора, которое обеспечено архивной памятью, системой тревожного оповещения и необходимым комплектом программного обеспечения с возможностью отображения плана местности на экране графического монитора, обозначения на плане местности ТСО и ТСВ, а также с возможностью регистрации тревожных сигналов ТСО и видеоинформации, поступающей от ТСВ, включающей также комплекс подводных технических средств, содержащий донные гидроакустические станции, размещенные вблизи платформы с образованием дальней зоны обнаружения, гидролокатор бокового обзора, телеуправляемый необитаемый подводный аппарат, отличающаяся тем, что введен третий радиоканал связи, сформированный на дрейфующих вблизи платформы ледовых полях посредством радиобуев, оснащенных навигационной аппаратурой ГЛОНАСС, а также гидроакустический канал связи, сформированный гидроакустическими станциями, антенны которых посредством кабель-троса закреплены на внешней подвеске, причем на корпусе платформы по периметру установлены антенны высокочастотной бортовой гидроакустической станции, образуя защитную круговую ближнюю рабочую зону опознавания классификации обнаруженного в дальней зоне подводного объекта или несанкционированного подводного предмета, нейтрализация которого осуществляется телеуправляемым необитаемым подводным аппаратом с манипулятором, размещенным в подводном спускоподъемном устройстве платформы и наводимым на объект автоматически по сигналу бортовой гидроакустической станции или оператором, охранный модуль механизмов устьевого нефтегазового оборудования в рабочей зоне выполнен в виде подводного телевизионного комплекса, включаемого в работу по сигналу бортовой гидроакустической станции, дополнительно введено устройство для обнаружения и классификации приводняющегося объекта, содержащее гидролокатор, который содержит последовательно соединенные блок выбора порога и обнаружение эхосигналов, блок измерения амплитуд и времени обнаруженных эхосигналов, блок формирования классификационных признаков, блок принятия решения, и который через многоканальное приемное устройство и процессор соединен с индикаторным блоком оператора, периодический генератор, включающий источник высоковольтных наносекундных импульсов, гиромагнитную линию с NiZn ферритом, фильтр высоких частот, излучающую и приемную антенны, выход которой соединен с соответствующим входом многоканального приемного устройства, идентификатор взрывчатых веществ, РЛС сантиметрово-миллиметрового диапазона, лазерный модуль.
2. Система по п. 1, отличающаяся тем, что автономный мобильный самоходный подводный аппарат содержит движительный модуль, соединенный с модулем навигации и управления движением, который содержит бортовой вычислитель, модемы радиосвязи и гидроакустического канала связи, аппаратурный модуль, содержащий идентификатор взрывчатых веществ в твердом и газообразном состоянии, гидролокатор кругового обзора, блок сейсмических измерений, многолучевой эхолот, подводную телевизионную аппаратуру, автономный погружаемый гамма-спектрометр, радиолокационную станцию, измерители скорости звука, скорости и направления течения, модуль обнаружения и классификации надводных и подводных объектов в охранной зоне.
3. Система по любому из пп. 1, 2, отличающаяся тем, что подводная телевизионная аппаратура обеспечивает малокадровую телевизионную съемку в черно-белом и цветном изображениях донного объекта с дальностью видения не менее 0,7 Zb, при этом разрешающая способность обеспечивает возможность обнаружения объекта с минимальным размером 20 мм при минимальном контрасте ≈0,2 с.
4. Система по любому из пп. 1, 2, отличающаяся тем, что идентификатор взрывчатых веществ обеспечивает обнаружение взрывчатого азотосодержащего вещества типа гексаген от 1 кг, отравляющего серосодержащего вещества типа иприт от 1 кг, гаммаизлучающих радионуклеидов с объемной активностью растворимых в морской воде от 500 Бк/м, куб для цезия 137 за время не более 10 мин с дополнительной функцией гамма-спектрометра, позволяющей идентифицировать радиоактивные вещества, содержащиеся в поверхностном 10-сантиметровом слое донных отложений, безазотистых взрывчатых веществ.
5. Система по любому из пп. 1, 2, отличающаяся тем, что лазерный модуль содержит лазерный сканер, который работает в ближнем ИК диапазоне 1064 нм и лазерный батиметр, который работает в зеленом диапазоне 532 нм и предназначен для определения пространственного положения точек отражения от дна водоема и позволяет одновременно получать как батиметрические, так и топографические данные на прибрежную территорию и принцип действия которого основан на использовании двух лазеров в ближнем ИК диапазоне 1065 нм для определения пространственного положения точек отражения от водной поверхности в зеленом диапазоне 532 нм для определения пространственного положения точек отражения от дна водоема.
| Комбинированная двухрубежная система охраны периметров объектов | 2018 |
|
RU2683186C1 |
| ИНТЕЛЛЕКТУАЛЬНАЯ СИСТЕМА ОХРАННОЙ СИГНАЛИЗАЦИИ С ВОЗМОЖНОСТЬЮ ОБМЕНА ИНФОРМАЦИЕЙ МЕЖДУ СРЕДСТВАМИ ОБНАРУЖЕНИЯ | 2015 |
|
RU2594478C1 |
| РАДИОВОЛНОВОЕ УСТРОЙСТВО ДЛЯ ТРЕВОЖНОЙ СИГНАЛИЗАЦИИ С НЕПРЕРЫВНЫМ ИЗЛУЧЕНИЕМ ЧАСТОТНО-МОДУЛИРОВАННЫХ КОЛЕБАНИЙ | 2014 |
|
RU2584496C1 |
| Устройство для получения скрытых изображений на магнитоносителях | 1958 |
|
SU123198A1 |
| US 20090121888 A1, 14.05.2009 | |||
| US 7902977 B2, 08.03.2011. | |||

