Область техники
Настоящее изобретение относится, в общем, к электрическим машинам. В частности, изобретение относится к вращающейся или линейно-подвижной трехфазной машине с поперечным магнитным потоком, с конструкцией ротора или движителя в виде постоянного магнита. Машину данного типа можно использовать в качестве либо электродвигателя, либо генератора, в зависимости от области применения. Линейно-подвижную машину можно также именовать линейной машиной, поперечно-подвижной машиной или поступательно-подвижной машиной.
Предшествующий уровень техники
Топология машины с поперечным магнитным потоком (TFM) является примером машины с модулированными полюсами. Известно, что данная машина обладает рядом преимуществ по сравнению с обычными машинами. Базовая конструкция одностороннего статора с радиальным магнитным потоком характеризуется наличием единственной, простой фазной обмотки, параллельной воздушному зазору, и более или менее U-образной секции ярма, окружающей обмотку и выставляющей, в принципе, два параллельных ряда зубцов, обращенных к воздушному зазору. Многофазная компоновка предшествующего уровня техники характеризуется пакетированием магнитно разделенных однофазных блоков перпендикулярно направлению движения ротора или движителя. Затем, фазы электрически и магнитно сдвигают на 120 градусов для трехфазной компоновки, чтобы обеспечить плавную работу и создать более или менее равномерное усилие или крутящий момент, независимо от положения ротора или движителя. В данном случае, следует отметить, что упомянутый угол приведен в электрических градусах, которые эквивалентны механическим градусам, поделенным на число пар магнитных полюсов.
Цилиндрический электродвигатель использует концентрические статор и ротор, и тогда движение считается вращательным или бесконечным вращением. Линейная машина использует поступательное движение, которое, обычно, происходит не по замкнутой траектории движения, но может быть возвратно-поступательным движением по «линии». Линейная машина или приводной механизм содержит движитель вместо ротора. Магнитопровод может быть расположен в соответствии с одинаковыми основными магнитными принципами как в роторе, так и в приводном механизме, однако, геометрические схемы будут различаться.
Примером эффективной компоновки ротора или движителя является использование, так называемых, встроенных магнитов, объединенных с магнитомягкими секциями или частями полюсов, чтобы обеспечить возможность полю постоянных магнитов концентрировать магнитный поток или изгибаться в направлении, поперечном движению, как описано, например, в патентной заявке WO2007/024184 авторов Jack и др.
В WO2007/024184 раскрыта электрическая вращающаяся машина, которая включает в себя первую секцию сердечника статора, являющуюся, по существу, кольцевой и включающую в себя множество зубцов, вторую секцию сердечника статора, являющуюся, по существу, кольцевой и включающую в себя множество зубцов, катушку, расположенную между первой и второй кольцевыми секциями сердечника статора, и ротор, включающий в себя множество постоянных магнитов. Первая секция сердечника статора, вторая секция сердечника статора, катушка и ротор охватывают общую геометрическую ось, и множество зубцов первой секции сердечника статора и второй секции сердечника статора расположены так, чтобы выступать к ротору. Кроме того, зубцы второй секции сердечника статора сдвинуты по окружности относительно зубцов первой секции сердечника статора, и постоянные магниты в роторе разделены в направлении по окружности между собой проходящими в осевом направлении секциями полюсов, выполненных из магнитно-мягкого материала.
Пакетирование отдельных фазных секций статора, обычно, основано на физическом магнитном разделении между отдельными фазными секциями для ослабления магнитной связи между фазами, что, возможно, может создавать эффект ослабления эффективного магнитного потока в воздушном зазоре во время работы.
В некоторых областях применения желательно обеспечить машину, которая была бы как можно более компактной геометрически, чтобы входить в заданное ограниченное пространство и обладать способностью к высокой объемной производительности, выраженной, например, в крутящем моменте на единицу объема [Нм/м3].
Обычная схема возбуждения симметричным трехфазным синусоидальным или трапецеидальным сигналом со 120 градусным сдвигом фазы не обеспечивает полного магнитного сцепления сердечника в течение циклически повторяющихся периодов работы, и, поэтому, значительная часть суммарного объема сердечника статора постоянно используется малоэффективным образом.
Таким образом, предшествующий уровень техники раскрывает настройки набора из трех фазных блоков с расстановкой фаз 0°, 120° и 240°.
Существует проблема оптимизации таких показателей качества или значений, как крутящий момент на единицу объема и/или крутящий момент на единицу тока.
В патенте EP 1005136 раскрывается машина с поперечным магнитным потоком, содержащая объединенные фазы. Однако, по-прежнему, желательно обеспечить упрощение конструкции данной электрической машины.
Краткое изложение существа изобретения
Предлагается электрическая машина, содержащая статорное устройство и подвижное устройство,
при этом статорное устройство является многофазным статорным устройством, содержащим множество фаз, расположенных в ряд в боковом направлении, перпендикулярном направлению движения подвижного устройства, причем, статорное устройство содержит множество наборов зубцов, причем, каждый зубец выступает к подвижному устройству и содержит поверхность сопряжения, обращенную к подвижному устройству, причем, зубцы каждого набора распределены вдоль направления движения, причем, множество наборов зубцов содержит два внешних набора и множество внутренних наборов, расположенных в боковом направлении между внешними наборами; причем, зубцы внутренних наборов шире в боковом направлении, чем зубцы внешних наборов, и обеспечивают общий путь магнитного потока, совместно используемый двумя соседними фазами.
В вариантах осуществления электрической машины, подвижное устройство содержит множество постоянных магнитов, разделенных между собой в упомянутом направлении движения секциями полюсов, сформированными в виде прямолинейных стержней, удлиненных в боковом направлении, и секции полюсов проходят в боковом направлении через все фазы статора. В частности, поверхности сопряжения зубцов внешних наборов могут определять боковое пространство, измеряемое в боковом направлении, активной области воздушного зазора между статорным устройством и подвижным устройством; и стержни могут обеспечивать путь магнитного потока, проходящий через боковое пространство активного воздушного зазора.
В вариантах осуществления электрической машины, зубцы соответствующих наборов расположены со сдвигом в направлении движения относительно зубцов других наборов.
Каждая фаза статорного устройства может быть сформирована двумя секциями сердечника статора, при этом, зубцы первой секции сердечника статора первой из двух соседних фаз и соответствующие зубцы второй секции сердечника статора второй из двух соседних фаз сформированы в виде общего набора зубцов, обеспечивающих общий путь магнитного потока, совместно используемый обеими соседними фазами.
Следовательно, зубцы соседних фаз выполняют магнитную функцию в качестве общего набора зубцов, которые являются общими для двух соседних/смежных фаз, и которые совместно используются магнитным потоком двух соседних/смежных фаз. Подвижное устройство и статорное устройство, каждое, имеют простую конструкцию, содержащую малое число частей. Каждая часть подвижного устройства имеет простую геометрическую форму, что обеспечивает эффективную и экономичную конструкцию.
Зубцы первой секции сердечника статора первой из двух соседних фаз могут быть расположены в таких же позициях (вдоль направления, перпендикулярного направлению движения подвижного устройства), как соответствующие зубцы второй секции сердечника статора второй из двух соседних фаз, т.е. зубцы смежных секций сердечника статора соседних фаз могут быть совмещены между собой в направлении, перпендикулярном направлению движения подвижного устройства. Первая секция сердечника статора первой фазы и вторая секция сердечника статора второй фазы могут быть сформированы в виде двух раздельных блоков, расположенных последовательно, например, впритык один к другому, или упомянутые секции могут быть сформированы в виде единого блока, с формированием, тем самым, общей секции сердечника статора, общей для соседних фаз.
Следовательно, преимущество состоит в том, что фазы объединены для совместного использования в качестве магнитопровода секции сердечника статора во время работы, поскольку данное решение обеспечивает постоянное эффективное использование значительной части суммарного объема сердечника статора.
Преимущество состоит в том, что рабочий цикл намагничивания увеличивается, поскольку пути магнитных потоков совместно используются соседними фазами.
Преимущество состоит в том, что статорное устройство может функционировать как односторонняя машина с поперечным магнитным потоком, поскольку, тем самым, повышаются удельные объемные и массовые характеристики. Таким образом, можно повысить показатели качества, например, крутящий момент на единицу объема и/или крутящий момент на единицу тока.
Преимущество состоит в том, что геометрическую ширину машины в направлении, перпендикулярном направлению движения можно уменьшить, поскольку магнитно-разделяющая секция между фазами приводит к увеличению геометрической ширины.
Кроме того, преимущество состоит в том, что электрическая вращающая машина может содержать постоянные магниты с суммарной длиной в осевом направлении, укороченной по сравнению с обычным статорным устройством с разделенными фазами. Дополнительное преимущество состоит в том, что укороченные в осевом направлении постоянные магниты будут приводить к снижению стоимости.
Когда общая секция статора соседних фаз сформирована в виде единого блока, то для статорного устройства требуется меньшее число компонентов, поскольку секция сердечника статора совместно используется, по меньшей мере, двумя фазами. В статорных устройствах в соответствии с предшествующим уровнем техники, каждая фаза содержит собственный отдельный набор секций сердечника статора.
Кроме того, преимущество состоит в том, что, в данном случае, степень интеграции компонентов выше, и, благодаря этому, статорное устройство может быть прочнее и проще в изготовлении.
Набор зубцов задан как группа зубцов, например, множество зубцов.
Поскольку фазы расположены в ряд в направлении, перпендикулярном направлению движения подвижного устройства, то, во вращающейся машине, данное направление будет аксиальным.
Подвижное устройство может быть ротором во вращающемся подвижном устройстве или движителем в линейно подвижном устройстве.
В некоторых вариантах осуществления, секция сердечника статора имеет магнитно-мягкую структуру. Преимущество состоит в том, что более высокая степень использования магнитно-мягкой структуры приводит к повышению рабочих характеристик на единицу объема. В одном варианте осуществления, секции сердечника статора выполнены из магнитно-мягкого порошка. При изготовлении секций сердечника статора из магнитно-мягкого порошка, можно упростить изготовление статорного устройства, и возможна более эффективная концентрация магнитного потока, с использованием преимущества эффективных трехмерных путей магнитного потока.
Каждая секция сердечника статора может содержать секцию спинки сердечника статора и набор зубцов, проходящий от секции сердечника статора, при этом, секция спинки сердечника статора соединяет зубцы и обеспечивает путь магнитного потока между соседними зубцами в направлении движения. Секция сердечника статора может дополнительно содержать секцию ярма, которая обеспечивает путь магнитного потока в боковом направлении к другой секции сердечника статора, содержащей другой набор из наборов зубцов той же фазы.
В некоторых вариантах осуществления, статорное устройство содержит единственную секцию ярма, соединяющую секции сердечника статора всех фаз. Во вращающейся машине, перемычка магнитопровода может быть секцией ярма статора, расположенной концентрично с первой и второй секциями сердечника статора. При упомянутом расположении данной секции сердечника статора, технологический процесс изготовления частей сборки статора и технологический процесс сборки статора можно облегчить и сделать более экономичным.
Таким образом, секция сердечника статора может быть изготовлена так, чтобы содержать только небольшое число частей и допускать сообщение по магнитному потоку каждого зуба одного набора зубцов с, по меньшей мере, двумя зубцами другого набора из наборов зубцов той же самой фазы.
В некоторых вариантах осуществления, статорное устройство является трехфазным статором. Нечетное число фаз предпочтительно, так как мгновенная сумма токов равна нулю, что означает, что число проводов питания машины уменьшено на один, и число коммутирующих устройств, необходимых в преобразователе, уменьшено на два. Поэтому, минимальное нечетное число нескольких фаз равно трем. Можно также обеспечить другие нечетные числа фаз, например, пять, семь, девять и т.п. фаз. Следовательно, в общем, многофазное статорное устройство может содержать n фаз (n является целым числом, и n>1), включающих в себя две внешних фазы, имеющих, каждая, одну соседнюю фазу, и n-2 внутренних фазы, при этом, каждая внутренняя фаза имеет две соседних фазы, причем, каждая внутренняя фаза содержит два общих набора зубцов, причем, каждая общая группа зубцов является общей/используется совместно с одной из соответствующих соседних фаз внутренней фазы, причем, каждая внешняя фаза содержит набор внешних зубцов и набор общих зубцов, общих/совместно используемых с соответствующей соседней фазой внешней фазы.
Кроме того, можно также обеспечить четное число фаз, но четное число фаз не дает таких вышеописанных преимуществ, как нечетное число фаз.
В некоторых вариантах осуществления, электрическая машина является вращающейся машиной. Подвижное устройство является ротором. В данном случае, первая секция сердечника статора, вторая секция сердечника статора, катушка и ротор могут охватывать общую геометрическую ось. Во вращающейся машине, боковое направление является аксиальным направлением машины, и направление движения является окружным направлением машины.
Постоянные магниты в подвижном устройстве могут быть разделены между собой в направлении движения проходящими в боковую сторону секциями полюсов в виде прямолинейных стержней. Секции полюсов могут быть выполнены из магнитно-мягкого порошка. Постоянные магниты могут быть намагничены в направлении движения и с чередованием ориентации. В общем, постоянные магниты могут быть также прямолинейными стержнями, удлиненными в боковом направлении; при этом, стержни могут проходить через боковое пространство активного воздушного зазора.
В некоторых вариантах осуществления, электрическая машина является машиной с модулированными полюсами, например, машиной с поперечным магнитным потоком.
В обычных машинах, катушки формируют явно многополюсную структуру магнитного поля, и функция магнитного сердечника состоит как раз в том, чтобы проводить упомянутое многополюсное поле для связи магнита и/или других катушек.
В машине с модулированными полюсами, именно магнитопровод формирует многополюсное магнитное поле из создаваемого катушкой поля с намного меньшим числом полюсов, обычно, двумя полюсами. В машине с модулированными полюсами, магниты обычно формируют явно согласующееся многополюсное поле, но существует возможность получения магнитопровода, формирующего многополюсные поля от единственного магнита.
Машина с модулированными полюсами содержит трехмерный (3D) путь магнитного потока, использующий пути магнитных потоков в поперечном направлении как в статоре, так и в подвижном устройстве, например, в аксиальном направлении во вращающейся машине, в которой подвижное устройство является ротором. 3-мерные пути магнитных потоков особенно полезны при использовании статора с объединенными фазами.
Таким образом, в некоторых вариантах осуществления, статорное устройство и/или подвижное устройство содержит трехмерный (3D) путь магнитного потока, включающий в себя составляющую пути магнитного потока в поперечном направлении относительно направления движения.
Преимущество обеспечения модуляции состоит в том, что каждый полюс воспринимает всю магнитодвижущую силу (МДС) катушки, так что, когда число полюсов увеличивается, вместе с тем повышается напряженность магнитного поля (МДС/метр), без какого-либо изменения катушки. Данный эффект можно сравнить с обычной машиной, в которой, когда число полюсов увеличивается, увеличивается также число катушек, и, следовательно, каждая катушка становится меньше. Однако шаг полюсов согласуется также с числом полюсов, так что, когда число полюсов увеличивается, напряженность магнитного поля в обычной машине является более или менее постоянной, так как уменьшение отношения МДС/катушка уравновешивается уменьшением шага полюсов.
Для машины с модулированными полюсами, естественной является конструкция с большим числом полюсов. Данная конструкция может значительно повысить электрическую нагрузку, т.е. напряженность магнитного поля, возможно, при умеренных требованиях к объему необходимого проводника.
Таким образом, машина с модулированными полюсами будет демонстрировать максимальное преимущество в условиях, когда число полюсов является большим, и возможная электрическая нагрузка, использующая обычные катушки, является небольшой.
В некоторых вариантах осуществления, машина с модулированными полюсами содержит компоновку или надставку клювообразного полюса.
Для машин с модулированными полюсами, при выборе фиксированной геометрии, которая формирует крутящий момент с окружной/аксиальной поверхности, т.е. машины с радиальным полем, поле может передаваться радиально через воздушный зазор с магнитопроводом, по окружности на один шаг полюсов, что может осуществляться в статоре или роторе, или частично в том и другом, и аксиально в обоих направлениях для охвата катушки. Если аксиальный магнитопровод замыкается в статоре вокруг катушки, то создается компоновка клювообразного полюса.
Компоновку или надставку клювообразного полюса можно использовать совместно с объединенными фазами, однако, аксиальная клювообразная надставка должна быть ограничена или невелика, чтобы не вызывать рассеяния. Рассеяние может возникать, когда клювообразные выступы перекрываются между собой, поскольку данные перекрывающиеся поверхности могут обеспечивать нежелательный путь для магнитного потока рассеяния. Даже если клювообразные выступы проходят только на половину аксиальной ширины фазы, данные выступы могут находиться в непосредственной близости, и это может вызывать нежелательное рассеяние магнитного потока, так что, при использовании объединенных фаз следует применять лишь небольшие или умеренные выступы. Таким образом, для подгонки площади полюсного наконечника можно воспользоваться умеренными выступами, называемыми полуклювообразными полюсами, однако, клювообразные выступы не могут перекрываться аксиально, поскольку сдвиг фаз объединенных фаз препятствует свободному продолжению клювообразных выступов вдоль аксиального протяжения статора.
Настоящее изобретение относится к разным аспектам, включающим в себя вышеописанное статорное устройство и, в дальнейшем, соответствующие способы, устройства и/или технологические средства, обеспечивающие, в каждом случае, по меньшей мере, один полезный результат и преимущество, поясняемые в связи с первым упомянутым аспектом, и имеющие, в каждом случае, по меньшей мере, один вариант осуществления, соответствующий вариантам осуществления, описанным в связи с первым упомянутым аспектом и/или описанным в прилагаемой формуле изобретения.
Краткое описание чертежей
В дальнейшем изобретение поясняется описанием предпочтительных вариантов воплощения изобретения со ссылками на сопроводительные чертежи, на которых:
Фиг. 1 изображает примеры машины и статорного устройства с раздельными фазами, согласно предшествующему уровню техники.
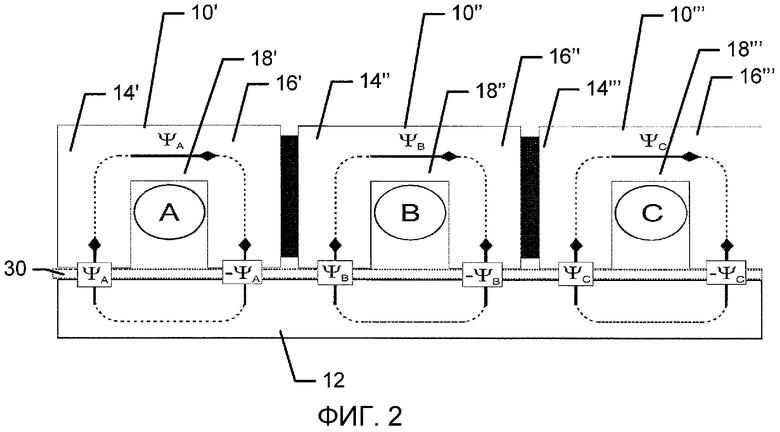
Фиг. 2 изображает пример поперечного сечения трехфазной машины с раздельными фазами.
Фиг. 3 изображает пример векторной диаграммы магнитного потока трехфазной машины с раздельными фазами.
Фиг. 4 изображает пример компоновки статора трехфазной машины с раздельными фазами, представляющей статор с направления, нормального относительно плоскости воздушного зазора.
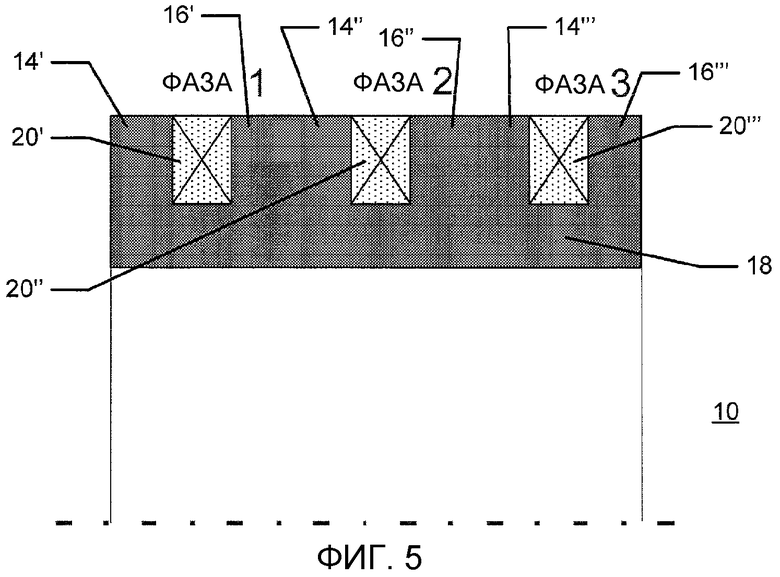
Фиг. 5 изображает пример статорного устройства с магнитно-объединенными фазами.
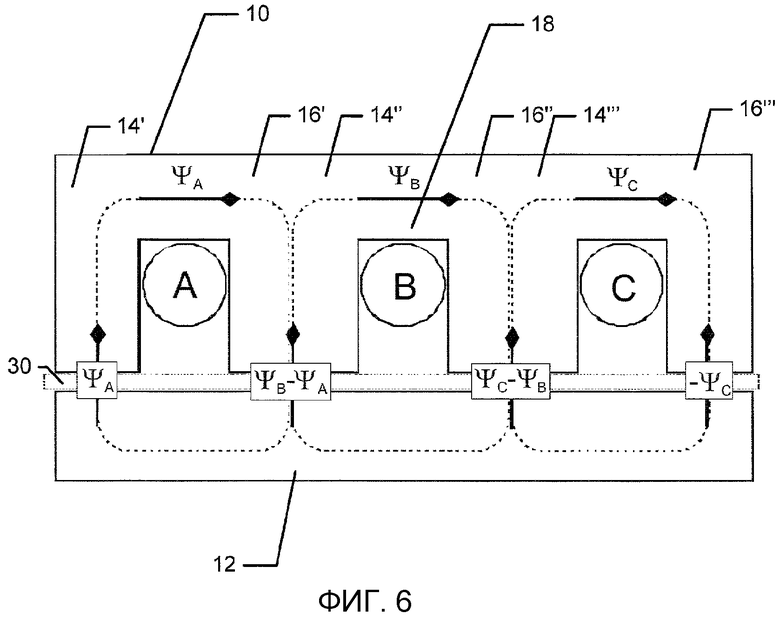
Фиг. 6 изображает пример поперечного сечения трехфазной машины с магнитно-объединенными фазами.
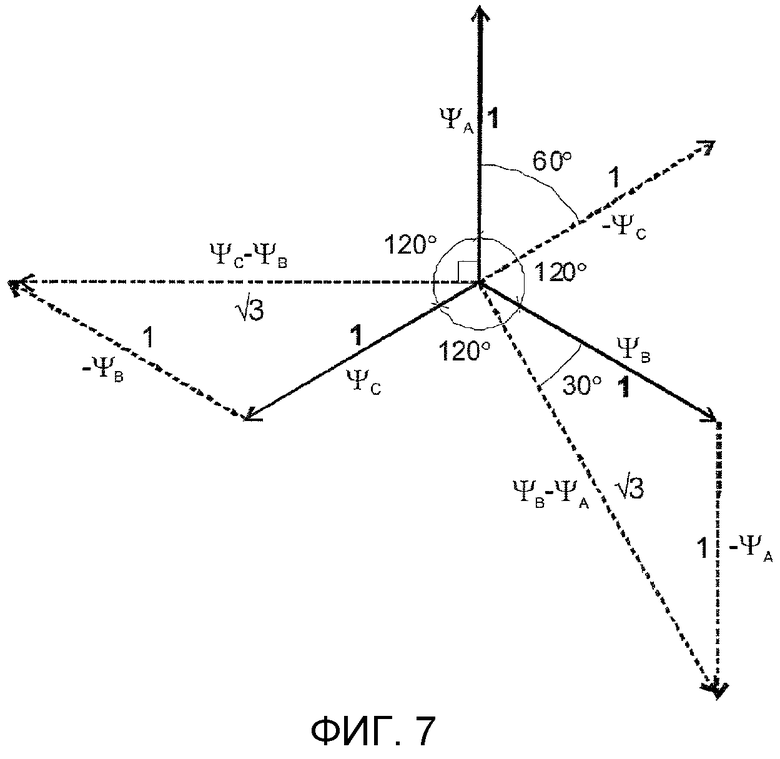
Фиг. 7 изображает пример векторной диаграммы магнитного потока трехфазной машины с магнитно-объединенными фазами.
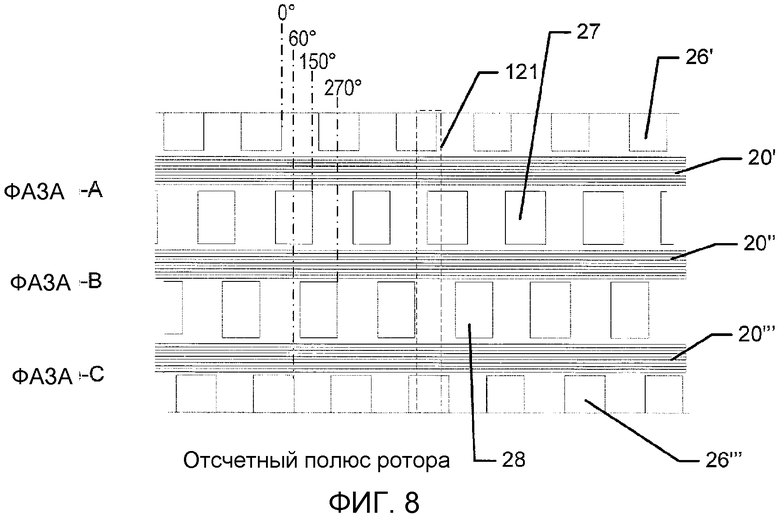
Фиг. 8 изображает пример компоновки статора трехфазной машины с магнитно-объединенными фазами, представляющей статор с направления, нормального относительно плоскости воздушного зазора.
Фиг. 9 изображает пример конструкции трехфазной машины с магнитно-объединенными фазами.
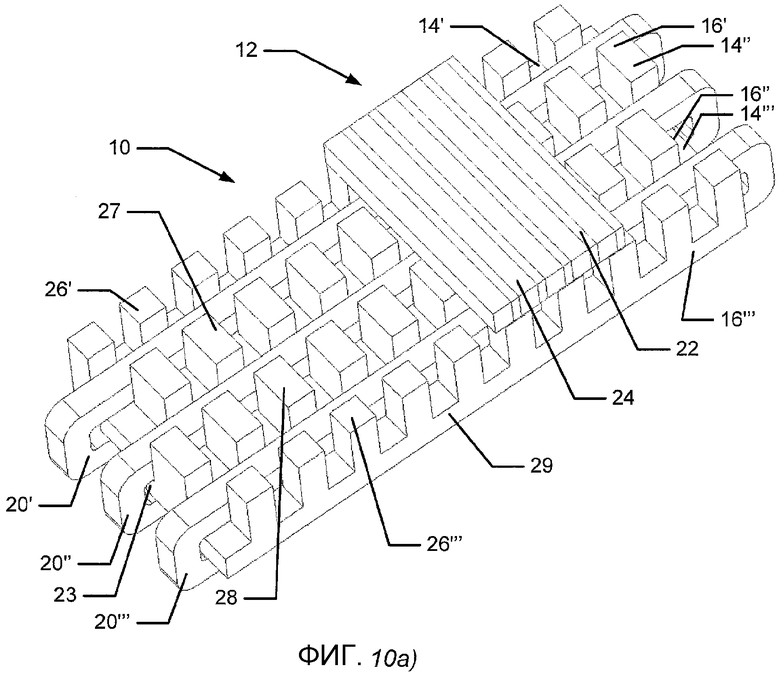
Фиг. 10 изображает примеры конструкции трехфазной линейно-подвижной машины.
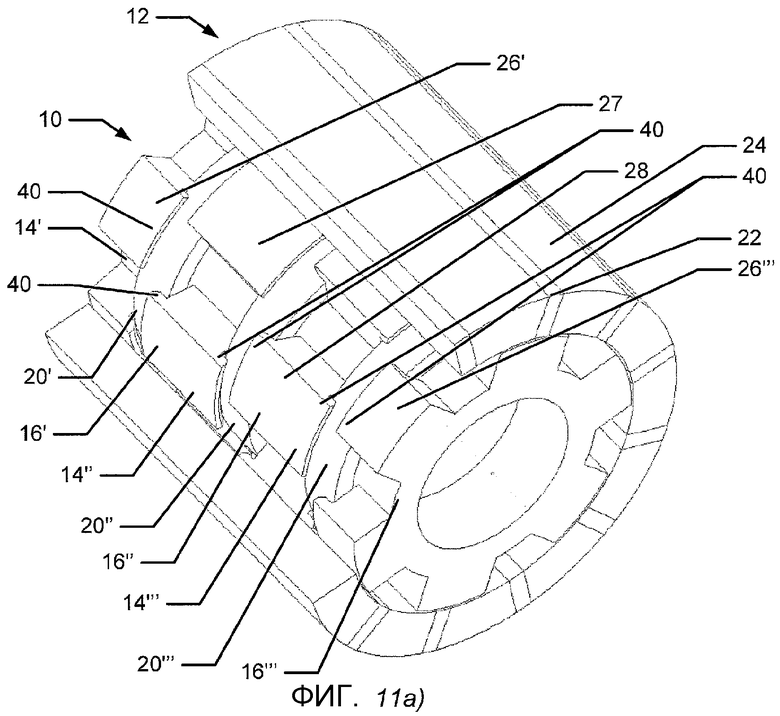
Фиг. 11 изображает примеры конструкции трехфазной машины с магнитно-объединенными фазами и полуклювообразными полюсами.
Фиг. 12 изображает пример путей магнитного потока в статорном устройстве и подвижном устройстве.
Описание предпочтительных вариантов
осуществления изобретения
В нижеследующем описании приведены ссылки на прилагаемые фигуры, которые наглядно показывают, каким образом можно практически использовать изобретение.
На фиг. 1-4 изображены примеры трехфазной машины с раздельными фазами, которую можно назвать машиной с модулированными полюсами и раздельными фазами (SPMPM).
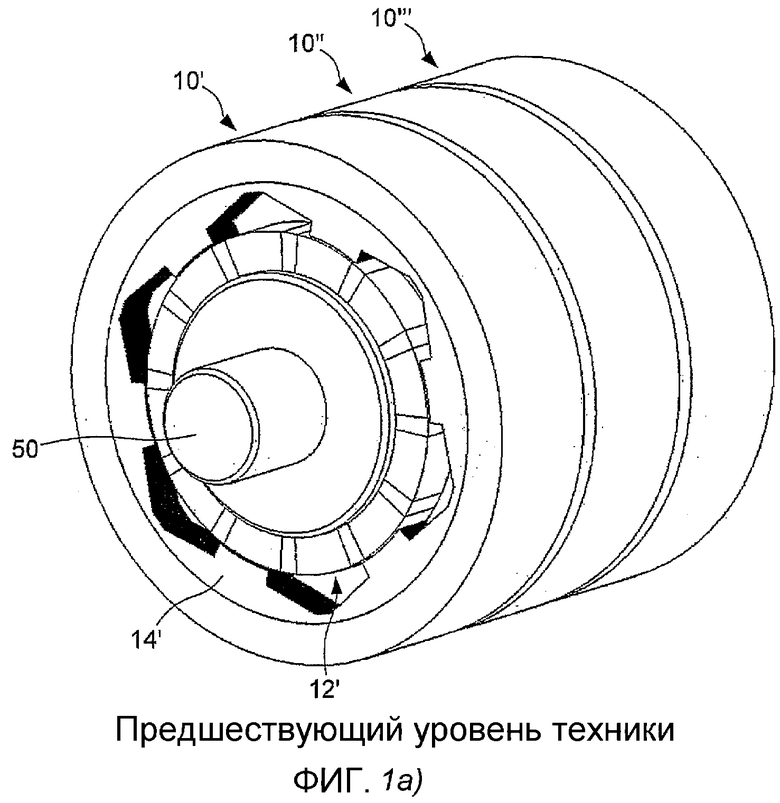
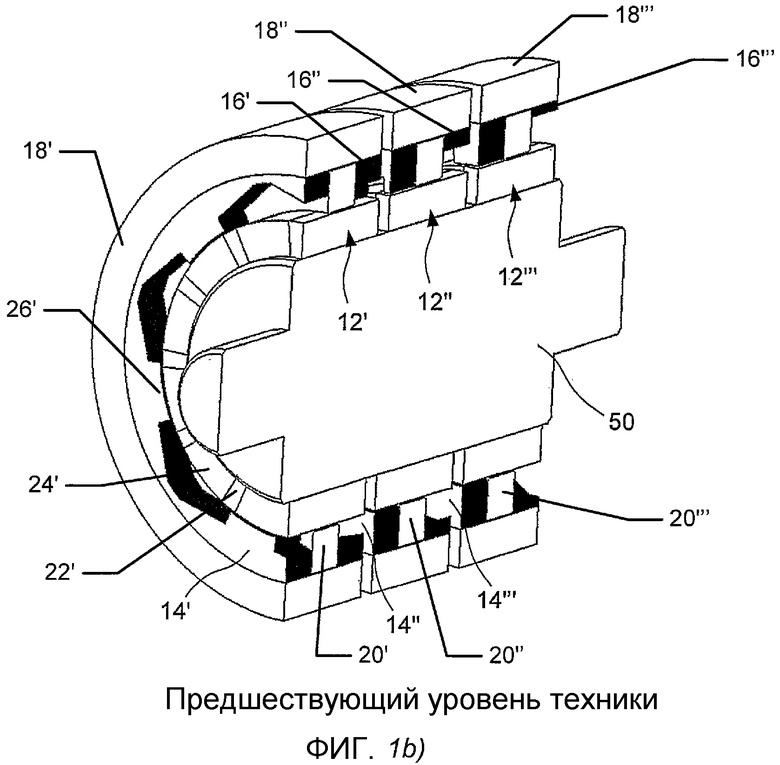
На фиг. 1a)-1b) изображен пример трехфазной радиальной машины согласно предшествующему уровню техники. Электрическая вращающаяся машина содержит сборку статора и ротор. С целью настоящего описания, снабженные штрихами позиции обычно относятся, с одним штрихом ('), к характерному элементу первой фазы, с двумя штрихами (”), к соответствующему характерному элементу второй фазы, и с тремя штрихами ('”), к соответствующему характерному элементу третьей фазы, а позиции без штриха относятся к соответствующим характерным элементам всех фаз. На фигурах изображены три сборки 10', 10”, 10'” статора, и каждая сборка статора содержит первую секцию 14 сердечника статора, вторую секцию 16 сердечника статора, секцию 18 ярма статора и катушку 20. На фигурах изображены три ротора 12', 12”, 12'”, и каждый ротор 12 содержит постоянные магниты 22 и секции 24 полюсов. Показан вал 50, на который установлен ротор. Каждая секция 14, 16 сердечника статора имеет, по существу, кольцевую форму и включает в себя множество радиально проходящих зубцов 26. Зубцы расположены так, чтобы проходить к ротору 12 для формирования вместе с ротором 12 замкнутого пути магнитного потока.
Каждая из показанных фазных секций, т.е. однофазных машин, содержит собственный ротор, т.е. каждая фазная секция полностью соответствует однофазной машине.
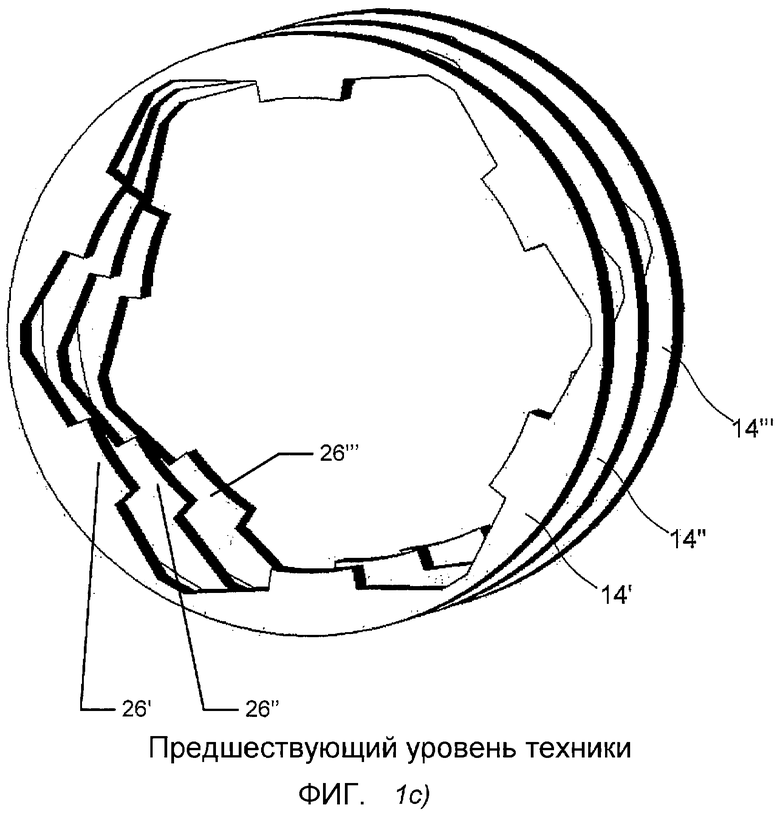
Пример пространственного разделения фаз в соответствии с предшествующим уровнем техники изображен на фиг. 1c). На фигуре показана первая секция 14', 14”, 14'” сердечника статора каждой фазы. Пространственное разделение в данном примере связано с тем, что зубцы 26 секции сердечника статора одной фазы смещены по окружности относительно зубцов секции сердечника статора других фаз.
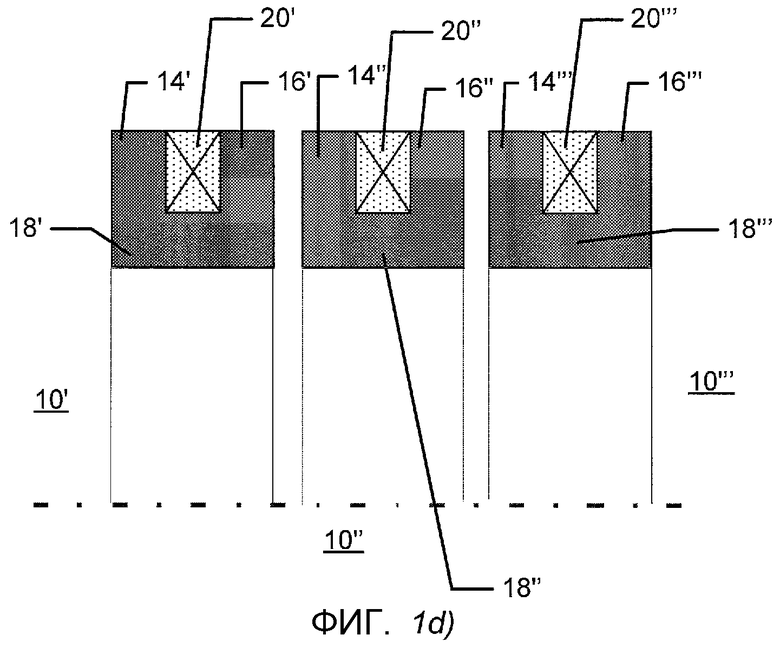
В схематическом примере статорного устройства с раздельными фазами на фиг. 1d) изображены три раздельных фазы, фаза 1 сборки 10' статора, фаза 2 сборки 10” статора и фаза 3 сборки 10'” статора.
Каждый базовый блок или фазный блок содержит одну катушку или сердечник 20, первую секцию 14 сердечника статора, вторую секцию 16 сердечника статора и секцию 18 ярма статора. Данный фазный блок создает однонаправленный, но пульсирующий крутящий момент.
На фиг. 2 изображено поперечное сечение трехфазной машины с модулированными полюсами и раздельными фазами (SPMPM). Фаза 1 указана буквой A, секцией 14' сердечника статора и сборкой 10' статора, фаза 2 указана буквой B, секцией 14” сердечника статора и сборкой 10” статора, и фаза 3 указана буквой C, секцией 14'” сердечника статора и сборкой 10'” статора. Первая секция 14 сердечника статора, вторая секция 16 сердечника статора и секция 18 ярма статора показаны для каждого фазного блока.
Показаны ротор 12 и воздушный зазор 30 между ротором и каждой из сборок 10', 10”, 10'” статоров. Показан путь магнитного потока Ψ для каждой из фаз, ΨΑ для фазы A, ΨΒ для фазы B и ΨC для фазы C. Показано также значение отдельных магнитных потоков, + или -, в воздушном зазоре 30.
На фиг. 3 изображена векторная диаграмма магнитного потока для раздельных фазных блоков. Сдвиг фазных блоков составляет 120°. Магнитный поток фазы 1 обозначен ΨΑ, магнитный поток фазы 2 обозначен ΨΒ, и магнитный поток фазы 3 обозначен ΨC.
На фиг. 4 изображен пример сдвига фазных блоков, фазы A, фазы B и фазы C, относительно полюса ротора. Отсчетный полюс ротора показан пунктирным прямоугольником 121, проходящим через фазу A, фазу B и фазу C. На фигуре показаны зубцы 26 и катушки 20 фазных блоков. Зубцы 26 являются частью секций сердечника статора, как показано на фиг. 1b). Сдвиги 120° между фазными блоками показаны и обозначены положением чисел 0°, 120°, 240° и 360°.
Каждый из упомянутых фазных блоков содержит два набора зубцов 26 якоря, как показано на фиг. 1b), при этом, первая секция 14 сердечника статора включает в себя один набор зубцов, и вторая секция 16 сердечника статора содержит другой набор зубцов. Одна группа выходит с левой стороны от катушки 20 и имеет северный полюс, при возбуждении током некоторого направления в обмотке якоря, другая группа выходит с правой стороны от катушки 20 и имеет южный полюс, при возбуждении током того же направления в обмотке якоря.
Когда применяют несколько фазных блоков, данные блоки разделены между собой аксиально, и такое разделение означает, что зубцы с правой стороны крайнего левого блока находятся в непосредственной близости от зубцов левой стороны соседнего фазного блока и т.д. для каждого из блоков со смежными сторонами.
Однако, упомянутая непосредственная близость не выгодна для большинства очевидных вариантов выбора углового сдвига зубцов.
На фиг 5-9 изображены примеры трехфазной машины с объединенными фазами, которую можно назвать машиной с модулированными полюсами и объединенными фазами (CPMPM).
Машина с объединенными фазами содержит сборку 10 статора, как показано на фиг. 5 и фиг. 6, и подвижное устройство 12, например, ротор, как показано на фиг. 6. На фиг. 5, 6 и 8, позиция с одним штрихом ('), с двумя штрихами (”) и с тремя штрихами ('”) относится, соответственно, к характерному элементу первой фазы, характерному элементу второй фазы и характерному элементу третьей фазы.
На фиг. 5 показано, что сборка 10 статора содержит три фазы, фазу 1, фазу 2 и фазу 3. Фазу 1 и фазу 3 можно обозначить как внешние фазы, и фазу 2 можно обозначить как внутреннюю фазу. Каждая фаза содержит одну катушку или сердечник 20, на которую(ый) можно подавать разные напряжения для работы, например, синусоидальной или прямоугольной формы. Каждая фаза дополнительно содержит первую секцию 14 сердечника статора и вторую секцию 16 сердечника статора. Как видно на фигуре, первая секция 14” сердечника статора фазы 2 и вторая секция 16' сердечника статора фазы 1 сформированы в виде единого блока. Аналогично, первая секция 14'” сердечника статора фазы 3 и вторая секция 16” сердечника статора фазы 2 сформированы в виде единого блока. Кроме того, первая секция 14' сердечника статора фазы 1 является единым блоком, который не используется совместно ни с одной другой фазой, и, аналогично, вторая секция 16'” сердечника статора фазы 3 является единым блоком. Таким образом, существует четыре единых блока, при этом, два из единых блоков являются общими для двух разных фаз.
Сборка 10 статора содержит секцию 18 ярма статора, которая является общей для всех фаз и совместно используется ими. Секция ярма статора расположена с возможностью обеспечения пути магнитного потока между секциями сердечника статора, то есть, выполняет функцию перемычки магнитопровода. Материал, применяемый для секции ярма статора, может быть магнитно-мягким порошком для облегчения сборки статора и обеспечения перехода с относительно низким магнитным сопротивлением между первой и второй секциями сердечника статора.
На фиг. 5 подвижное устройство не изображено, но подвижное устройство будет сконфигурировано с возможностью расположения в верхней части фигуры таким образом, что подвижное устройство находится близко к катушкам 20.
На фиг. 6 изображено поперечное сечение трехфазной машины с модулированными полюсами и объединенными фазами (CPMPM). Сборка 10 статора содержит фазу 1, обозначенную A, фазу 2, обозначенную B, и фазу 3, обозначенную C. Для каждого фазного блока изображены первая секция 14 сердечника статора и вторая секция 16 сердечника статора. Секция 18 ярма статора совместно используется тремя фазами и является общей для них.
На фигуре показано подвижное устройство 12, которое может быть ротором или движителем, и подвижное устройство содержит секции постоянных магнитов и секции полюсов (не изображены), которые могут быть выполнены из магнитно-мягкого материала. Секции полюсов расположены между постоянными магнитами и, тем самым, разделяют постоянные магниты между собой. Более полное описание секций полюсов, постоянных магнитов и магнитного потока приведено в заявке WO2007/024184.
Если подвижное устройство 12 является ротором, то ротор 12 может располагаться на валу или шпинделе (не показанном) и находиться в центре сборки 10 статора, или, если ротор является ротором внешнего типа, то ротор может располагаться вокруг сборки статора. Если подвижное устройство 12 является бегуном, то устройство может плоским линейным устройством, которое не имеет никакой внутренней или внешней части в виде ротора, а движитель перемещается только вверх-вниз или вправо-влево.
На фиг. 6 показан также воздушный зазор 30 между общей сборкой 10 статора и подвижным устройством 12.
Подвижное устройство 12, например, ротор, расположено с возможностью взаимодействия со всеми тремя фазными секциями, т.е. ротор может проходить в аксиальном направлении, чтобы взаимодействовать со всеми тремя фазными секциями. Электрическая машина может содержать радиальные фазные секции или аксиальные фазные секции, или некоторую их комбинацию.
Каждая из секций 14', 16', 14”, 16”, 14'” и 16'” сердечника статора может иметь, по существу, кольцевую форму и включать в себя множество радиально проходящих зубцов, как показано на фиг. 8. Зубцы расположены с возможностью проходить по направлению к подвижному устройству 12, например, ротору, для формирования замкнутого пути магнитного потока с ротором 12. Зубцы могут проходить внутрь к внутреннему ротору, или ротор может быть расположен снаружи секций 14, 16 сердечника статора, и тогда зубцы должны располагаться с возможностью проходить радиально наружу.
Для каждой из фаз указан путь магнитного потока Ψ, ΨA для фазы A, ΨΒ для фазы B и ΨC для фазы C. Показаны также значения суммированных магнитных потоков в воздушном зазоре 30.
Первая секция 14 и вторая секция 16 сердечника статора могут быть аксиально сдвинуты одна относительно другой и могут быть расположены вокруг общей оси. Каждая катушка 20 может быть расположена между первой секцией 14 и второй секцией 16 сердечника статора. Преимущество расположения катушки 20, подобное вышеописанному, состоит в том, что все МДС (магнитодвижущие силы) наблюдаются около каждого полюса, что дает, в результате, высокую электрическую нагрузку и высокую выходную мощность, при данном размере и/или стоимости. Секция 18 ярма статора может быть расположена концентрично с первой секций 14 и второй секцией 16 сердечника статора. Секция 18 ярма статора в аксиальном направлении может иметь ширину, по существу, соответствующую ширине сборки первой секции 14 и второй секции 16 сердечника статора и катушки 20, чтобы располагаться как перемычка магнитопровода между первой секцией 14 и второй секцией 16 сердечника статора. При изготовлении секции 18 ярма статора из магнитно-мягкого порошка, эффективность трехмерного пути магнитного потока, проходящего из первой секции 14 и второй секции 16 сердечника статора в секцию 18 ярма статора, повышается в сравнении с вариантом осуществления, в котором секция ярма статора выполнена из пластин. Кроме того, одна из первой секции 14 и второй секции 16 сердечника статора может быть сдвинута по углу относительно другой из первой секции 14 и второй секции 16 сердечника статора. Упомянутый сдвиг приводит к тому, что зубцы, см. фиг. 8, одной из первой секции 14 и второй секции 16 сердечника статора находятся в положении вдоль окружности, отличающемся от положения вдоль окружности зубцов другой из первой секции 14 и второй секции 16 сердечника статора. Каждый зубец одной из первой секции 14 и второй секции 16 сердечника статора может находиться, в направлении вдоль окружности, в середине зазора между двумя зубцами другой из первой секции 14 и второй секции 16 сердечника статора.
Концепция сдвига зубцов одной из первой секции 14 и второй секции 16 сердечника статора относительно зубцов другой секции сердечника статора выгодна для эффективного использования вышеописанной и наиболее эффективной конструкции подвижного устройства.
На фиг. 8 изображен сдвиг объединенных фазных блоков, фазы A, фазы и фазы C относительно полюса подвижного устройства, например, полюса ротора. Отсчетный полюс 121 ротора показан пунктирным прямоугольником, проходящим через фазу A, фазу B и фазу C. На фигуре показана катушка 20 каждого из фазных блоков. Каждая фаза A, B, C содержит первую секцию сердечника статора (не изображена) и вторую секцию сердечника статора (не изображена), и секции сердечника статора содержат зубцы. Как показано выше на фиг. 5, первая секция 14” сердечника статора фазы 2, которая соответствует фазе B в данном случае, и вторая секция 16' сердечника статора фазы 1, которая соответствует фазе A в данном случае, сформированы в виде единого блока. Таким образом, зубцы 27 совместно используются фазами A и B. Аналогично, первая секция 14'” сердечника статора фазы 3, которая соответствует фазе C в данном случае, и вторая секция 16” сердечника статора фазы 2, которая соответствует фазе B в данном случае, сформированы в виде единого блока, и, следовательно, зубцы 28 совместно используются фазами B и C. Кроме того, первая секция 14' сердечника статора фазы 1, соответствующая фазе A в данном случае, является единым блоком, и зубцы 26' не являются общими для двух фаз. Аналогично, вторая секция 16'” сердечника статора фазы 3, соответствующая фазе C в данном случае, является единым блоком, и зубцы 26'” не являются общими для двух фаз. Таким образом, существуют четыре единых блока, при этом, два из единых блоков являются, каждый, общими для двух разных фаз, и, следовательно, каждый из наборов 27 и 28 зубцов совместно используется двумя разными фазами.
Сдвиги между фазами заметны на фигуре и указаны положениями чисел 0°, 150°, 270° и 60°, соответственно, и подробно описаны ниже.
Таким образом, один единый набор зубцов может служить для совместного использования последовательными фазами, вместо использования раздельных фазных блоков. Выбор соответствующей ориентации каждого набора зубцов может обеспечить значительное преимущество. Если, например, обеспечена трехфазная машина с тремя катушками, расположенными аксиально, то данное решение дает четыре набора зубцов, по одной на каждом конце, и один набор между фазами 1 и 2 и другой набор между фазами 2 и 3, смотри фиг. 8. Выбор угла выполняется не интуитивно, а должен быть близок к 0°, 150°, 270° и 60° для каждого из четырех наборов зубцов, при отсчете от одного конца до другого.
В соответствии с некоторыми вариантами осуществления, средние наборы зубцов имеют аксиальную ширину, отличающуюся от ширины наборов зубцов на концах, как показано на фиг. 8, что обеспечивает небольшую корректировку осевой ширины для обеспечения точно сбалансированного набора потокосцеплений и крутящих моментов между тремя фазами.
Пример конструкции трехфазной вращающейся машины с объединенными фазами изображен на фиг. 9.
На фиг. 9 изображено статорное устройство 10 и подвижное устройство 12 в виде ротора. Позиции с одним штрихом ('), с двумя штрихами (”) и с тремя штрихами ('”) относятся, соответственно, к характерному элементу первой фазы, характерному элементу второй фазы и характерному элементу третьей фазы. Статорное устройство 10 содержит три фазы, при этом, каждая фаза содержит катушку 20, первую секцию 14 сердечника статора и вторую секцию 16 сердечника статора. На фигуре показан один ротор 12, который охватывает статорное устройство 10. Ротор 12 содержит постоянные магниты 22 и секции 24 полюсов, проходящие вдоль всего статорного устройства 10. Возможно, обеспечен вал (не изображен), на который установлен статор. Каждая секция 14, 16 сердечника статора имеет, по существу, кольцевую форму и включает в себя секцию 29 спинки сердечника статора и множество радиально проходящих зубцов, которые проходят от секции спинки сердечника статора. Зубцы расположены с возможностью проходить наружу к ротору 12 для формирования замкнутого пути магнитного потока с ротором 12. Секция 29 спинки сердечника статора соединяет зубцы в направлении вдоль окружности. Секции сердечника статора дополнительно содержат секцию 23 ярма, проходящую аксиально от секции 29 спинки сердечника статора к соседней секции сердечника статора для обеспечения аксиальной перемычки магнитопровода.
Вторая секция 16' сердечника статора фазы 1 и первая секция 14” сердечника статора фазы 2 расположены как один блок, т.е. объединенная секция сердечника статора, в соответствии с чем, фаза 1 и фаза 2 совместно используют секцию сердечника статора. Таким образом, зубцы 27 объединенного фазного блока расположены с возможностью совместного использования фазой 1 и фазой 2, в соответствии с чем, набор зубцов первой секции 14” сердечника статора фазы 2 и набор зубцов второй секции 16' сердечника статора фазы 1 сформированы как один блок.
Зубцы 28 объединенного фазного блока расположены с возможностью совместного использования фазой 2 и фазой 3, в соответствии с чем, набор зубцов первой секции 14'” сердечника статора фазы 3 и набор зубцов второй секции 16” сердечника статора фазы 2 сформированы как один блок.
Зубцы 26 на каждом конце статорного устройства 10 не используются совместно двумя фазами, и, следовательно, зубцы 26' принадлежат только фазе 1, и зубцы 26'” принадлежат только фазе 3. Кроме того, зубцы 26' и 26'” внешних фаз 1 и 3 определяют аксиальное пространство активной области воздушного зазора статора, которое проходит в осевом направлении между внешними краями зубцов 26' и 26'”, соответственно. Постоянные магниты 22 и секции 24 полюсов проходят в осевом направлении через всю активную область воздушного зазора, т.е. между аксиально внешними краями поверхностей зубцов 26' и 26'”, обращенными к ротору.
На фиг. 10a) показан пример конструкции трехфазной, линейно подвижной машины с объединенными фазами. На фиг. 10b) изображена линейно подвижная машина.
На фиг. 10a) изображено статорное устройство 10 и подвижное устройство 12 в форме движителя, выполненного с возможностью линейного или поперечного движения вдоль статорного устройства. Позиции с одним штрихом ('), с двумя штрихами (”) и с тремя штрихами ('”) относятся, соответственно, к характерному элементу первой фазы, характерному элементу второй фазы и характерному элементу третьей фазы. Статорное устройство 10 содержит три фазы, при этом, каждая фаза содержит катушку 20, первую секцию 14 сердечника статора и вторую секцию 16 сердечника статора. Движитель 12 содержит постоянные магниты 22 и секции 24 полюсов, проходящие вдоль всего статорного устройства 10. Каждая секция 14, 16 сердечника статора имеет, по существу, линейную форму и включает в себя множество линейно проходящих зубцов. Зубцы расположены с возможностью проходить по направлению к движителю 12 для формирования замкнутого пути магнитного потока с движителем 12.
Вторая секция 16' сердечника статора фазы 1 и первая секция 14” сердечника статора фазы 2 расположены в виде одного блока, т.е. объединенной секции сердечника статора, и, тем самым, фаза 1 и фаза 2 совместно используют секцию сердечника статора. Таким образом, зубцы 27 объединенного фазного блока расположены с возможностью их совместного использования фазой 1 и фазой 2, вследствие чего, набор зубцов первой секции 14” сердечника статора фазы 2 и набор зубцов второй секции 16' сердечника статора фазы 1 сформированы в виде одного блока.
Зубцы 28 объединенного фазного блока расположены с возможностью их совместного использования фазой 2 и фазой 3, вследствие чего, набор зубцов первой секции 14'” сердечника статора фазы 3 и набор зубцов второй секции 16” сердечника статора фазы 2 сформированы в виде одного блока.
Наборы зубцов 26 на каждом из двух концов статорного устройства 10 не используются совместно двумя фазами, и, следовательно, зубцы 26' принадлежат только фазе 1, и зубцы 26'” принадлежат только фазе 3.
На фиг. 10b) все три фазы являются раздельными, и, следовательно, первая секция 14 и вторая секция 16 сердечника статора никакими фазами совместно не используются. Таким образом, в машине, показанной на фиг. 10b) существуют только наборы раздельных зубцов 26, т.е. зубцов, принадлежащих только одной фазе.
Примеры конструкции трехфазных машин с объединенными фазами и полуклювообразными полюсами показаны на фиг. 11.
На фиг. 11a) и 11b) изображены статорное устройство 10 и подвижное устройство 12. На фиг. 11a), подвижное устройство 12 является ротором, который на изображении охватывает статорное устройство 10, и, на фиг. 11b), подвижное устройство 12 является движителем, выполненным с возможностью линейного или поперечного движения вдоль статорного устройства. Позиции с одним штрихом ('), с двумя штрихами (”) и с тремя штрихами ('”) относятся, соответственно, к характерному элементу первой фазы, характерному элементу второй фазы и характерному элементу третьей фазы. Статорное устройство 10 содержит три фазы, при этом, каждая фаза содержит катушку 20, первую секцию 14 сердечника статора и вторую секцию 16 сердечника статора. Подвижное устройство 12 содержит постоянные магниты 22 и секции 24 полюсов, проходящие вдоль всего статорного устройства 10. Каждая секция 14, 16 сердечника статора включает в себя множество проходящих зубцов. Зубцы расположены с возможностью проходить по направлению к подвижному устройству 12 для формирования замкнутого пути магнитного потока с подвижным устройством 12.
Вторая секция 16' сердечника статора фазы 1 и первая секция 14” сердечника статора фазы 2 расположены в виде одного блока, т.е. объединенной секции сердечника статора, и, тем самым, фаза 1 и фаза 2 совместно используют секцию сердечника статора. Таким образом, зубцы 27 объединенного фазного блока расположены с возможностью их совместного использования фазой 1 и фазой 2, вследствие чего, набор зубцов первой секции 14” сердечника статора фазы 2 и набор зубцов второй секции 16' сердечника статора фазы 1 сформированы в виде одного блока.
Группа зубцов 28 объединенного фазного блока расположена с возможностью их совместного использования фазой 2 и фазой 3, вследствие чего, набор зубцов первой секции 14'” сердечника статора фазы 3 и набор зубцов второй секции 16” сердечника статора фазы 2 сформированы в виде одного блока.
Наборы зубцов 26 на каждом конце статорного устройства 10 не используются совместно двумя фазами, и, следовательно, набор зубцов 26' принадлежит только фазе 1, и зубцы 26'” принадлежат только фазе 3.
Кроме того, машины с объединенными фазами, показанные на фиг. 11a) и 11b) содержат полуклювообразные полюса 40, которые являются короткими продолжениями зубцов в группах зубцов 26', 27, 28 и 26'”, которые частично перекрывают катушки 20. Полуклювообразные полюса являются короткими, небольшими или мелкими клювообразными полюсами, т.е. клювообразными полюсами, которые не проходят вдоль всей аксиальной ширины фазы, но которые проходят только вдоль небольшой части аксиальной ширины, вследствие чего исключается или ослабляется магнитное рассеяние. На фиг. 11a) и 11b) изображено, что полуклювообразные полюса 40 расположены как одно целое с зубцами. Наборы зубцов 27 и 28, каждый из которых совместно используется двумя фазами, содержит полуклювообразные полюса на обеих сторонах зубцов, т.е. смежных с катушками 20, а наборы зубцов 26' и 26'”, которые не используются совместно двумя фазами, а принадлежат только одной фазе, содержат полуклювообразные полюса только на одной стороне зубцов, смежной с соответствующей катушкой 20' и 20'”.
При использовании одинаковых магнитов, одной и той же магнитодвижущей силы статора, одинакового диаметра отверстия и одинаковой ширины воздушного зазора, можно реализовать 30% усиление крутящего момента в сравнении с машинами предшествующего уровня техники.
При использовании многофазных блоков, положения которые механически и электрически сдвинуты по углу, может быть создан более сильный и плавный крутящий момент, чем при использовании только одной фазы. Например, трехфазная машина может содержать фазные блоки, механически сдвинутые на 1/3 шага пары полюсов или 120-градусный электрический угол, и иметь фазные токи, разделенные на такой же угол по времени, при использовании единственной конструкции подвижного устройства, например, конструкции ротора, проходящей по всему протяжению или вокруг трех статоров.
Аналогичный эффект можно обеспечить при использовании трех статорных блоков, совмещенных, что касается расположения вдоль окружности, но получающих токи, которые сдвинуты между собой на 120 градусов во времени, чтобы действовать в сочетании с тремя секциями подвижного устройства, например, секциями ротора, по одной для каждой фазы, которые сдвинуты между собой на 120 градусов по окружности.
Как упоминалось, трехфазная машина предшествующего уровня техники с модулированными полюсами и раздельными фазами содержит три фазы с 120° сдвигом между каждой из фаз, как показано на фиг. 3. Каждая фаза состоит из двух наборов зубцов, сдвинутых на 180°, формирующих набор северных полюсов и набор южных полюсов. Трехфазная машина состоит из шести наборов зубцов (в трех парах) и трех катушек. Каждая фаза отделена от соседней фазы небольшим расстоянием или воздушным зазором, смотри фиг. 2, чтобы обеспечить минимальную магнитную связь между фазами.
Когда фазы объединены, а не разделены, как показано на фиг. 5, 6 и 8, смежные зубцы содержат совместно используемый путь магнитного потока, как показано на фиг. 6. Объединение соседних зубцов может дать, в результате, машину с четырьмя наборами зубцов и тремя катушками, смотри фиг. 8, и с общим подвижным устройством, например, ротором, простирающимся вдоль полной осевой ширины машины.
Каждый набор зубцов должен быть установлен под некоторым углом и собирать некоторое количество магнитного потока, чтобы обеспечивать симметричную трехфазную работу, при этом, каждая катушка связывает магнитный поток равной величины и под углом сдвига фаз 0°, 120° и 240°, соответственно, см. фиг. 7.
Для вычисления условий, для которых получается, в результате, симметричный трехфазный набор магнитных потоков катушек, машину с модулированными полюсами и объединенными фазами анализируют при следующих исходных предположениях:
- плотность магнитного потока в воздушном зазоре является постоянной в осевом направлении и синусоидально изменяется в направлении по окружности;
- магнитный поток, входящий в зуб, Ψ=ba, где b означает плотность магнитного потока в воздушном зазоре, a означает площадь поверхности воздушного зазора зуба;
- угловое положение зуба (по окружности) определяет угол сдвига фаз магнитного потока, входящего в зуб;
- магнитный поток, проходящий в осевом направлении через секцию спинки сердечника непосредственно над катушкой, равен магнитному потоку, пронизывающему катушку.
Ниже приведены ссылки на векторные диаграммы на фиг. 3 и 7.
Симметричная трехфазная машина имеет следующие потокосцепления катушек:
ΨΑ=|Ψ|<0°
ΨΒ=|Ψ|<120°
ψC=|Ψ|<240°
Зубцы пронумерованы 1, 2, 3, 4 в осевом направлении, при этом, в каждый зубец поступает сумма магнитных потоков:
Ψ1=ΨΑ
Ψ2=ΨB-ΨΑ
Ψ3=ΨC-ΨB
Ψ4=ΨC
Установление связи магнитного потока через зубец с искомыми тремя симметричными магнитными потоками катушек, как показано векторной диаграммой на фиг. 7, дает, в результате, следующие магнитные потоки через зубцы:
Ψ1=|Ψ|<0°
Ψ2=|√3Ψ|<150°
Ψ3=|√3Ψ|<270°
Ψ4=|Ψ|<60°
Следовательно, для симметричной трехфазной машины, зубцы (1, 2, 3, 4) можно расположить под углом сдвига фаз 0°, 150°, 270°, 60°, при этом, угол сдвига фаз 360° соответствует величине шага по окружности между соседними зубцами. Следовательно, угловой сдвиг зубцов относительно одного из наборов зубцов составляет 0°/N, 150°/N, 270°/N, 60°/N, где N означает число зубцов в каждом наборе зубцов. Кроме того, точную площадь поверхности можно обеспечить, когда относительные значения ширины зубцов в осевом направлении в соответствующих наборах зубцов равны: 1, √3, √3 и 1, соответственно. Следовательно, внутренние зубцы, которые совместно используются двумя соседними фазами, шире в √3 раз, чем внешние зубцы, которые не являются общими для фаз, а принадлежат только одной фазе.
На фиг. 7 изображена векторная диаграмма магнитного потока для объединенных фаз, на которой показаны углы, а также ширина в осевом направлении, равная 1 единице, √3 единицам, √3 единицам и 1 единице, соответственно. Показаны также магнитные потоки объединенных фаз.
На фиг. 12 изображен пример путей магнитных потоков в статорном устройстве и в подвижном устройстве. Машина с модулированными полюсами характеризуется трехмерным (3D) путем магнитного потока, использующим пути магнитных потоков в «аксиальном» поперечном направлении как в статоре, так и в подвижном устройстве, например, роторе.
На фигуре 12, подвижное устройство 12, например, ротор, наблюдается из радиального внешнего положения относительно статорного устройства 10, из которого показаны три зуба 26. На фигуре показаны аксиальное 304 и тангенциальное 305 направления подвижного устройства/статорного устройства. Число постоянных магнитов 22 в подвижном устройстве показано заштрихованными участками, с секциями 24 полюсов между ними. На эскизе, зубцы 26 статора находятся в положении точно противоположно секции 24 полюса, что дает основной путь 300 магнитного потока, изображенный толстыми линиями. Как можно видеть, направление магнитного потока через постоянные магниты 22 является, в основном, 2-мерным, а магнитный поток через секции 24 полюсов является 3-мерным. Кроме того, магнитный поток концентрируется, в основном, в центральных областях 301 каждого постоянного магнита 22 между двумя соседними секциями полюсов. Таким образом, приведенная конструкция подвижного устройства 12 допускает концентрацию магнитного потока от постоянных магнитов таким образом, что поверхность подвижного устройства 12, обращенная к зубу 26 статора может направлять суммарный магнитный поток от обоих соседних постоянных магнитов к поверхности зуба. Концентрацию магнитного потока можно рассматривать как функцию площади постоянных магнитов, обращенной к каждой секции полюса, деленной на площадь, обращенную к зубу. Данные характеристики концентрации магнитного потока каждой секции полюса позволяют использовать слабые дешевые постоянные магниты в качестве постоянных магнитов в подвижном устройстве и дают возможность обеспечивать очень высокие плотности магнитного потока в воздушном зазоре. Концентрации магнитного потока может способствовать выполнение секции полюса из магнитно-мягкого порошка, способствующего созданию изображенных расчетных трехмерных путей магнитного потока.
Хотя на фиг. 12 не изображено, в статорном устройстве существует соответствующий 3-мерный путь магнитного потока.
Как также показано на фиг. 8, 3-мерный путь магнитного потока содержит аксиальный или поперечный путь магнитного потока подвижного устройства 12, при этом, путь магнитного потока поперечен направлению движения. 3-мерные пути магнитных потоков в статорном устройстве и в подвижном устройстве являются особенно подходящими при использовании статора с объединенными фазами.
Возможно создание радиальной машины или аксиальной машины, или смешанной аксиальной и радиальной машины.
В варианте с аксиальным магнитным потоком, участки зубцов, которые обращены к воздушному зазору, могут формировать концентрические ряды с катушками или обмотками между данными рядами. Поэтому трехфазный вариант может быть спроектирован с тремя раздельными наборами, каждый, из двух концентрических рядов зубцов и катушкой или обмоткой, с промежутком до ближайшего фазного набора для исключения магнитной связи. Таким образом, аксиальная компоновка с объединенными фазами может объединять два соседних или смежных ряда зубцов одинаковым образом, как в варианте с радиальным магнитным потоком в воздушном зазоре (см., например, фиг. 8).
В общем, конструкции статора, описанные в настоящей заявке, могут быть выполнены из магнитно-мягкого порошка, например, по существу, чистого железного порошка, полученного способом водного распыления, или губчатого железного порошка, содержащего частицы неправильной формы, которые покрыты электрической изоляцией. В данном контексте, термин «по существу, чистый» означает, что порошок должен быть, по существу, без включений, и что следует обеспечивать минимальное содержание примесей O, C и N. Средние размеры частиц, обычно, меньше 300 мкм и больше 10 мкм.
Однако, применим любой магнитно-мягкий металлический порошок или порошок металлического сплава, при условии, что магнитно-мягкие свойства достаточны, и порошок пригоден для прессования штампом.
Электрическая изоляция частиц порошка может быть выполнена из неорганического материала. Особенно подходящей является изоляция такого типа, которая раскрыта в патенте США 6348265 (который включен в настоящее описание путем отсылки), который относится к частицам основного порошка, состоящим из, по существу, чистого железа, содержащего изолирующий слой, содержащий кислород и фосфор. Порошки, содержащие изолированные частицы, имеются в наличии в виде материалов Somaloy®500, Somaloy®550 или Somaloy®700, производимых компанией Hoganas AB, Швеция.
Хотя некоторые варианты осуществления представлены на фигурах и подробно описаны, изобретение не ограничено упомянутыми вариантами осуществления и может быть осуществлено другими способами, не выходящими за пределы существа изобретения, определенного в нижеследующей формуле изобретения. В частности, следует понимать, что возможно использование других вариантов осуществления, и возможно создание конструктивных и функциональных модификаций, не выходящих за пределы объема настоящего изобретения.
В пунктах формулы изобретения на устройство, перечисляющих несколько средств, некоторые из данных средств могут быть осуществлены одним и тем же элементом аппаратуры. Очевидное обстоятельство, что некоторые признаки упомянуты во взаимно отличающихся, зависимых пунктах формулы изобретения или описаны в разных вариантах осуществления, не означает, что, в подходящих случаях, нельзя использовать сочетание упомянутых признаков.
Следует подчеркнуть, что термин «содержит/содержащий», при использовании в настоящем описании, служит для указания присутствия заявленных признаков, целочисленных значений, этапов или компонентов, но не исключает присутствия или добавления, по меньшей мере, одного другого признака, целочисленного значения, этапа, компонента или их группы.
| название | год | авторы | номер документа |
|---|---|---|---|
| Электрическая машина с поперечным потоком | 2022 |
|
RU2797363C1 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 1990 |
|
RU2037940C1 |
| Электрическая машина с поперечным магнитным потоком | 2023 |
|
RU2818077C1 |
| СБОРКА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ | 2006 |
|
RU2406208C2 |
| АСИНХРОННЫЙ ТРЕХФАЗНЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2759161C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С МНОГОПАКЕТНЫМ ИНДУКТОРОМ | 2009 |
|
RU2382475C1 |
| СИНХРОННО-АСИНХРОННЫЙ ЭЛЕКТРОДВИГАТЕЛЬ | 2018 |
|
RU2752234C2 |
| ЭЛЕКТРОМЕХАНИЧЕСКИЙ ПРЕОБРАЗОВАТЕЛЬ | 2018 |
|
RU2716489C2 |
| ЭЛЕКТРИЧЕСКАЯ МАШИНА | 2017 |
|
RU2688204C2 |
| БЕСКОНТАКТНАЯ РЕДУКТОРНАЯ МАГНИТОЭЛЕКТРИЧЕСКАЯ МАШИНА С АКСИАЛЬНЫМ ВОЗБУЖДЕНИЕМ | 2010 |
|
RU2437203C1 |





Настоящее изобретение относится к электрическим машинам, в частности к вращающимся или линейно-подвижным трехфазным машинам с поперечным магнитным потоком с конструкцией ротора или движителя в виде постоянного магнита. Технический результат - повышение удельных объемных и массовых характеристик. Электрическая машина содержит статорное устройство и подвижное устройство. Статорное устройство содержит множество фаз, расположенных в ряд в боковом направлении, перпендикулярном направлению движения подвижного устройства. Статорное устройство содержит множество наборов зубцов и множество катушек. Множество наборов зубцов содержит два внешних набора и множество внутренних наборов, расположенных в боковом направлении между внешними наборами. Зубцы внутренних наборов шире в боковом направлении, чем зубцы внешних наборов, и обеспечивают путь общего магнитного потока, совместно используемого двумя соседними фазами. Подвижное устройство содержит множество постоянных магнитов, разделенных между собой в направлении движения секциями полюсов, сформированными в виде прямолинейных стержней. 2 н. и 27 з.п. ф-лы, 12 ил.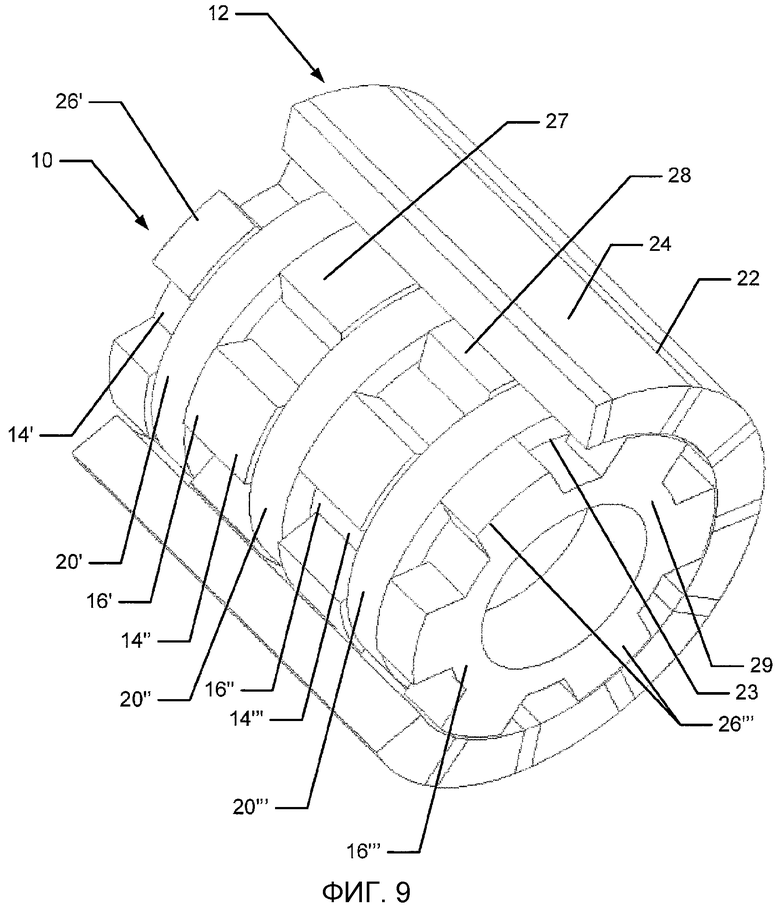
1. Электрическая машина, содержащая статорное устройство и подвижное устройство,
причем статорное устройство является многофазным статорным устройством, содержащим множество фаз, расположенных в ряд в боковом направлении, перпендикулярном направлению движения подвижного устройства, причем статорное устройство содержит множество наборов зубцов и множество катушек, причем каждый зубец выступает к подвижному устройству и содержит поверхность сопряжения, обращенную к подвижному устройству, причем зубцы каждого набора распределены вдоль направления движения, причем множество наборов зубцов содержит два внешних набора и множество внутренних наборов, расположенных в боковом направлении между внешними наборами; причем зубцы внутренних наборов шире в боковом направлении, чем зубцы внешних наборов, и обеспечивают путь общего магнитного потока, совместно используемого двумя соседними фазами; причем поверхности сопряжения зубцов внешних наборов определяют боковое пространство активной области воздушного зазора между статорным устройством и подвижным устройством;
причем подвижное устройство содержит множество постоянных магнитов, разделенных между собой в направлении движения секциями полюсов, сформированными в виде прямолинейных стержней, удлиненных в боковом направлении, причем стержни обеспечивают путь магнитного потока, проходящий через боковое пространство активной области воздушного зазора; и
причем зубцы соответствующих наборов расположены со сдвигом в направлении движения относительно зубцов других наборов.
2. Электрическая машина по п.1, в которой статорное устройство содержит множество секций сердечника статора, при этом каждая секция сердечника статора содержит один из наборов зубцов.
3. Электрическая машина по п.2, в которой секции сердечника статора выполнены из магнитно-мягкого порошка.
4. Электрическая машина по любому из пп.2 или 3, в которой множество катушек расположены между секциями сердечника статора.
5. Электрическая машина по любому из пп.2 или 3, в которой каждая секция сердечника статора содержит секцию спинки сердечника статора и набор зубцов, проходящий от секции сердечника статора, при этом секция спинки сердечника статора соединяет зубцы и обеспечивает путь магнитного потока между соседними зубцами набора зубцов в направлении движения.
6. Электрическая машина по п.5, в которой каждая секция сердечника статора дополнительно содержит секцию ярма, которая обеспечивает путь магнитного потока в боковом направлении к другой секции сердечника статора, содержащей другой набор из наборов зубцов той же фазы.
7. Электрическая машина по любому из пп.2 или 3, содержащая две внешние фазы, имеющие, каждая, одну соседнюю фазу, и внутренние фазы, имеющие, каждая, две соседние фазы; при этом каждая внутренняя фаза содержит два общих набора зубцов, причем каждый общий набор зубцов обеспечивает общий путь магнитного потока с одной из соответствующих соседних фаз внутренней фазы, причем каждая внешняя фаза содержит набор внешних зубцов и набор общих зубцов, причем общие зубцы обеспечивают общий путь магнитного потока с соответствующей соседней фазой внешней фазы и причем общие зубцы имеют ширину в направлении, перпендикулярном направлению движения, большую, чем соответствующая ширина внешних зубцов, и меньшую, чем удвоенная соответствующая ширина внешних зубцов.
8. Электрическая машина по п.7, в которой статорное устройство является трехфазным статором.
9. Электрическая машина по любому из пп.2 или 3, в которой электрическая машина является вращающейся машиной и причем подвижное устройство является ротором.
10. Электрическая машина по п.9, в которой статорное устройство является трехфазным статором и содержит четыре набора зубцов, при этом каждый набор содержит N зубцов, где N является целым числом больше, чем 1, и причем зубцы соответствующих наборов зубцов расположены по окружности со сдвигом на углы 0°/N, 150°/N, 270°/N, 60°/N относительно зубцов первого из наборов зубцов.
11. Электрическая машина по п.8, в которой значения боковой ширины четырех наборов зубцов равны 1 единице, √3 единиц, √3 единиц и 1 единице, соответственно.
12. Электрическая машина по любому из пп.2 или 3, в которой подвижное устройство является движителем, выполненным с возможностью линейного перемещения в направлении движения подвижного устройства.
13. Электрическая машина по любому из пп.2 или 3, в которой электрическая машина является машиной с поперечным магнитным потоком.
14. Электрическая машина по любому из пп.2 или 3, в которой статорное устройство и/или подвижное устройство обеспечивают трехмерный (3D) путь магнитного потока, включающий в себя составляющую пути магнитного потока в поперечном направлении относительно направления движения.
15. Статорное устройство, выполненное с возможностью расположения в электрической машине, при этом электрическая машина дополнительно содержит подвижное устройство,
причем статорное устройство является многофазным статорным устройством, в котором фазы расположены в ряд в направлении, перпендикулярном направлению движения подвижного устройства, и в котором каждая фаза содержит две секции сердечника статора, содержащих, каждая, соответствующий набор зубцов, перемычку магнитопровода, соединяющую секции сердечника статора, и катушку, и причем зубцы расположены так, чтобы выступать к подвижному устройству; и
причем зубцы первой секции сердечника статора первой из двух соседних фаз и соответствующие зубцы второй секции сердечника статора второй из двух соседних фаз обеспечивают общий путь магнитного потока, совместно используемый обеими соседними фазами.
16. Статорное устройство по п.15, в котором зубцы первой секции сердечника статора первой из двух соседних фаз расположены в таких же позициях в направлении, перпендикулярном направлению движения подвижного устройства, как соответствующие зубцы второй секции сердечника статора второй из двух соседних фаз.
17. Статорное устройство по п.15 или 16, в котором каждая секция сердечника статора имеет магнитомягкую структуру.
18. Статорное устройство по любому из пп.15 или 16, в котором наборы зубцов секций сердечника статора каждой фазы расположены со сдвигом друг относительно друга в направлении, перпендикулярном направлению движения подвижного устройства, на величину сдвига и при этом по меньшей мере две из фаз имеют разные сдвиги.
19. Статорное устройство по любому из пп.15 или 16, в котором зубцы каждой секции сердечника статора имеют ширину в направлении, перпендикулярном направлению движения подвижного устройства, и при этом зубцы первой секции сердечника статора имеют ширину, отличающуюся от ширины зубцов второй секции сердечника статора.
20. Статорное устройство по любому из пп.15 или 16, в котором первая секция сердечника статора и вторая секция сердечника статора сформированы в виде единого блока, содержащего набор общих зубцов, общих для первой и второй секций сердечника статора.
21. Статорное устройство по любому из пп.15 или 16, содержащее две внешних фазы, имеющих, каждая, одну соседнюю фазу, и центральные фазы, имеющие, каждая, две соседних фазы; при этом каждая центральная фаза содержит два общих набора зубцов, причем каждый общий набор зубцов обеспечивает общий путь магнитного потока с одной из соответствующих соседних фаз центральной фазы, причем каждая внешняя фаза содержит набор внешних зубцов и набор общих зубцов, причем общие зубцы обеспечивают общий путь магнитного потока с соответствующей соседней фазой внешней фазы и причем общие зубцы имеют ширину в направлении, перпендикулярном направлению движения, большую, чем соответствующая ширина внешних зубцов, и меньшую, чем удвоенная соответствующая ширина внешних зубцов.
22. Статорное устройство по п.21, в котором статорное устройство является трехфазным статором.
23. Статорное устройство по п.22, в котором статорное устройство содержит четыре набора зубцов, при этом каждый набор содержит N зубцов, где N является целым числом больше, чем 1, и причем зубцы соответствующих наборов зубцов расположены по окружности со сдвигом на углы 0°/N, 150°/N, 270°/N, 60°/N относительно зубцов первого из наборов зубцов.
24. Статорное устройство по п.22 или 23, в котором значения аксиальной ширины четырех наборов зубцов равны 1 единице, √3 единиц, √3 единиц и 1 единице, соответственно.
25. Статорное устройство по любому из пп.15 или 16, в котором электрическая машина является вращающейся машиной и причем подвижное устройство является ротором.
26. Статорное устройство по любому из пп.15 или 16, в котором подвижное устройство является движителем, расположенным с возможностью линейного перемещения в направлении движения подвижного устройства.
27. Статорное устройство по любому из пп.15 или 16, в котором катушка расположена между первой и второй секциями сердечника статора.
28. Статорное устройство по любому из пп.15 или 16, в котором статорное устройство и подвижное устройство образуют машину с поперечным магнитным потоком.
29. Статорное устройство по любому из пп.15 или 16, в котором статорное устройство и/или подвижное устройство содержат трехмерный (3D) путь магнитного потока, включающий в себя составляющую пути магнитного потока в поперечном направлении относительно направления движения.
| EP 1667310 A1, 07.06.2006 | |||
| WO 2007043161 A1, 19.04.2007 | |||
| DE 10050352 C1, 03.01.2002 | |||
| WO 2007024184 A1, 01.03.2007 | |||
| Устройство для адаптивной временной дискретизации сигналов | 1980 |
|
SU1005136A2 |
| ТОРОИДАЛЬНАЯ КОНСТРУКЦИЯ ШИХТОВАННОГО ПЛАСТИНАМИ МАГНИТОПРОВОДА С ЭЛЕКТРИЧЕСКИМИ ОБМОТКАМИ | 1992 |
|
RU2092924C1 |

