Изобретение относится к авиационной технике, в частности к способам технического контроля и диагностирования бортовых систем (БС) беспилотного летательного аппарата (БПЛА), а также к комплексным контрольно-проверочным системам, а именно к системам для наземного контроля исправности БС БПЛА, оснащенных автономной системой управления на базе вычислительных средств и радиолокационным визиром, и может быть использовано для информационной поддержки в принятии решений по результатам комплексной проверки для слабоструктурированных и трудноформализуемых задач технического контроля и диагностики.
За прототип способа принят способ технического контроля и диагностирования БС БПЛА, реализуемый в комплексе контрольно-проверочной аппаратуры бортовых систем БПЛА по патенту РФ №56662 U1, 2006 г, МПК G05B 23/02, G01S 7/40, опубл. 10.09.2006 г., Бюл. №25 [1].
Известный комплекс содержит имитатор цели с контрольной антенной, связанные по радиоканалу с антенной радиолокационного визира БПЛА, пульт управления, выполненный с возможностью задания программы проверки и отображения информации, устройство гарантированного электропитания, устройство коммутации, а также объединенные в локальную сеть с пультом управления посредством интерфейсных магистралей информационного обмена и концентратора локальной сети устройство контроля системы управления, устройство контроля электрооборудования и устройство самоконтроля.
Способ-прототип включает в себя:
- исходное тестирование центральной ЭВМ и ЭВМ устройства контроля системы управления, устройства контроля электрооборудования и устройства самоконтроля;
- первоначальную загрузку базового и технологического программного обеспечения из внешнего накопителя;
- штатный контроль БС БПЛА (с имитатором цели или без него) или самоконтроль комплекса, в т.ч. проверки электротехнических систем, исправности релейных устройств коммутации, наличие или отсутствие соединений между контрольными точками электрооборудования и проверку исправности системы управления БПЛА;
- проверку бортовых вычислительных устройств;
- проверку радиотехнических устройств;
- анализ сигналов, относящихся к телеметрии;
- самоконтроль комплекса в режиме работы с охватом внешних связей;
- проверку прохождения команд, формируемых устройством контроля системы управления;
- проверку аппаратуры взаимодействия с вычислительными устройствами системы управления БПЛА;
- управление процессом контроля, координацию работы всего оборудования комплекса, визуальное отображение процесса контроля, его промежуточных и окончательных результатов, документирование результатов контроля;
- выдачу результатов технического контроля параметров и диагностирования испытываемых БС БПЛА и самоконтроля комплекса КПА пользователям.
За прототип комплекса принят комплекс для проверки бортовых систем БПЛА по патенту РФ №2205441, 2001 г., МПК7 G05B 23/02, G01S 7/40, опубл. 27.06.2003 г. [2].
Комплекс-прототип содержит имитатор цели с контрольной антенной, связанные по радиоканалу с антенной радиолокационного визира БПЛА, пульт управления, выполненный с возможностью задания программы проверки и отображения информации, устройство гарантированного электропитания, устройство коммутации, а также объединенные в локальную сеть с пультом управления посредством интерфейсных магистралей информационного обмена и концентратора локальной сети устройство контроля системы управления, устройство контроля электрооборудования и устройство самоконтроля.
Недостатками способа-прототипа и комплекса-прототипа являются:
- низкая точность и достоверность результатов комплексной проверки БС БПЛА;
- высокая трудоемкость работы;
- низкие производительность и экономичность технического контроля и диагностирования;
- сложность принятия решений по результатам контроля при обнаружении неисправности.
Указанные недостатки обусловлены следующими причинами:
- невозможностью локализации неисправностей до конкретной составной части БС БПЛА, при некоторых сочетаниях итогов проверок;
- сложностью принятия решений по результатам контроля технического состояния, когда значение параметра находится около границ допусков, разделяющих два его крайних состояния, характеризуемых лингвистическими оценками «годен» или «не годен»;
- невозможностью использования экспертных знаний для решения слабоконструрированных задач, т.е. задач, которые содержат как количественные, так и качественные переменные, причем качественные аспекты проблемы имеют тенденцию доминировать, и трудноформализуемых задач контроля и диагностирования, т.е. задач, обладающих такими особенностями как неполнота, неточность, противоречивость и ошибочность исходных данных и знаний, как о предметной области, так и о решаемой задаче, большая размерность пространства возможных решений (что делает нереализуемым поиск решения посредством полного перебора всех имеющихся вариантов) и динамическое изменение исходных данных в процессе решения задач;
- невозможностью сбора и хранения диагностической информации и экспертных знаний, позволяющих формализовать в единой форме и использовать всю доступную, разрозненную информацию, например результаты тестовых проверок
неисправных изделий, ремонтно-эксплуатационную документацию, карточки учета отказов, отчеты, содержащие перечень отказов изделия, обобщенный анализ причин отказов, оценку средней наработки на отказ, результаты выполнения программы обеспечения надежности, рабочие цеховые журналы контроля и диагностики и т.д., а также неоднородную информацию, например детерминированную (измеренные значения параметров), статистическую (статистические законы распределения для отдельных значений параметров), лингвистическую (приближенные, субъективные оценки специалистов, выраженные с помощью нечетких понятий, отношений и высказываний профессионального языка) и интервальную (допустимые интервалы изменения значений параметров) из-за отсутствия механизмов сбора и хранения диагностической информации и экспертных знаний;
- невозможностью информационного взаимодействия между участниками жизненного цикла изделия, т.е. совокупности процессов, выполняемых от момента выявления потребностей общества в определенной продукции до момента удовлетворения этих потребностей и утилизации продукции.
Назначение изобретения связано со следующими областями:
- автоматизация работы лиц, принимающих решения (ЛПР);
- распространение и использование уникального опыта высококвалифицированных специалистов в данной области;
- оптимизация решения проблем, выдвижение и проверка гипотез;
- обучение и консультация неопытных пользователей;
- интеграция разрозненной информации в базе данных и базе знаний;
- информационное взаимодействие со всеми участниками жизненного цикла изделия на базе ИЛИ (CALS) - технологий (ИПИ - информационная поддержка процессов жизненного цикла изделий, англ. CALS - Continuous Acquisition and Lifecycle Support, непрерывная информационная поддержка поставок и жизненного цикла изделий).
Специфика предметной области определяет следующие проблемы технико-экономического характера:
- повышение достоверности решений, принимаемых по результатам контроля;
- повышение производительности технологической системы контроля;
- уменьшение трудовых, материальных и финансовых затрат;
- автоматизация подготовки данных для принятия управленческих решений.
Задачей изобретения является повышение точности и достоверности результатов комплексной проверки БС БПЛА, снижение трудоемкости, увеличение производительности и экономичности технического контроля и диагностирования путем организации интеллектуальной поддержки принятия решений.
Сущность заявляемого изобретения состоит в том, что при реализации способа технического контроля и диагностирования бортовых систем (БС) беспилотного летательного аппарата (БПЛА) с поддержкой принятия решений, заключающегося в том, что посредством комплекса контрольно-проверочной аппаратуры (КПА) производят исходное тестирование центральной электронно-вычислительной машины (ЭВМ) и ЭВМ контрольных устройств, загрузку базового и технологического программного обеспечения из внешнего накопителя, штатный контроль БС БПЛА и самоконтроль комплекса, включающие проверку электротехнических систем, проверку релейных устройств коммутации, наличие соединений между контрольными точками электрооборудования, проверку системы управления БПЛА, проверку бортовых вычислительных устройств, проверку радиотехнических устройств, анализ сигналов, относящихся к телеметрии, проверку прохождения команд, формируемых устройством контроля системы управления, проверку аппаратуры взаимодействия с вычислительными устройствами системы управления БПЛА, координацию работы всего оборудования упомянутого комплекса, управление процессом контроля и диагностирования, визуальное отображение его промежуточных и окончательных результатов, а также документирование и выдачу этих результатов пользователям,
после, указанных выше действий, дополнительно производят анализ и обработку данных, полученных от центральной ЭВМ комплекса через концентратор локальной вычислительной сети (ЛВС) и интерфейс взаимодействия с концентратором ЛВС, посредством интеллектуальной системы поддержки принятия решений (ИСППР), для чего, формируют базу знаний (БЗ) по модульному принципу, с возможностью ее постоянной адаптации, производят анализ и обработку результатов контроля, а именно осуществляют классификацию значений критичных параметров контроля, характеризующих критичные составные части БС БПЛА по качественному признаку, с присвоением каждому параметру качественной оценки для выявления предотказных состояний БС БПЛА и проведения упреждающего диагностирования, посредством модуля качественной оценки критичных параметров контроля (МКОКПК), при обнаружении неразличимых неисправностей (неполном обнаружении места неисправности) формируют оптимальные последовательности проведения диагностирования в виде первого ранжированного списка прецедентов посредством модуля библиотеки прецедентов (МБП), с использованием накопленного опыта решения подобных задач и модуля экспертных знаний (МЭЗ) в виде совокупности формул, решающих правил и алгоритмов, и второго ранжированного списка решений инцидента, посредством модуля поиска неисправностей (МЛН) на основе математического аппарата байесовской сети доверия (БСД), с учетом априорной информации экспертов, а также формируют окончательную оптимальную последовательность проведения диагностирования в виде третьего ранжированного списка прецедентов и решений инцидента, на основе обработки первого и второго списков, посредством модуля формирования оптимальной последовательности процедур диагностирования (МФОППД), и выдают этот список лицу, принимающему решения (ЛПР) через интерфейс взаимодействия с пользователями и ЛПР для обеспечения локализации неисправности до конкретной составной части БС БПЛА, причем накопление и хранение полученной информации производят в базе данных (БД), кроме того, по запросу ЛПР, выдают характеристики выбранных им прецедентов, наиболее близких к текущему инциденту, и содержащих собранную ранее диагностическую информацию, хранящуюся в МБП, затем через упомянутый интерфейс взаимодействия с пользователями и ЛПР производят выдачу пользователям окончательных результатов технического контроля параметров и диагностирования БС БПЛА и самоконтроля комплекса, прошедших обработку в ИСППР, в виде числовых значений и качественных оценок, характеризующих степень выраженности свойства «годен» для параметров, находящихся в области допустимых значений критичных параметров, при этом координацию и управление работой БЗ и БД осуществляют процессором, а электропитание составных частей комплекса - устройством гарантированного электропитания (УГЭП).
Сущность заявляемого устройства для осуществления заявляемого способа заключается в том, что в комплексе КПА БС БПЛА с ИСППР, содержащим имитатор цели с контрольной антенной, связанной посредством радиоканала с антенной радиолокационного визира БПЛА, выход сигналов опорной частоты которого соединен с опорным входом имитатора цели, устройство коммутации, соединенное с бортовым разъемом БПЛА посредством кабеля цепей соединения с контрольными точками электрооборудования, кабеля цепей передачи команд и кабеля сигнальных цепей, пульт управления и объединенные с ним в ЛВС посредством интерфейсных магистралей ЛВС, соединенных в концентраторе ЛВС по схеме «звезда», устройство контроля системы управления, устройство контроля электрооборудования и устройство самоконтроля, каждое из которых содержит устройство гальванической развязки, релейный передатчик команд и контрольный процессор, выполненный на основе ЭВМ, к системной шине которой подключен контроллер ЛВС, соединенный с соответствующей магистралью ЛВС, устройство дискретного ввода-вывода и устройство мониторинга, соединенные посредством соответствующей интерфейсной магистрали последовательного канала с входом-выходом интерфейса последовательного канала с пультом управления, кроме этого, устройство контроля системы управления содержит мультиплексор, входы которого образуют входы измеряемых сигналов устройства контроля системы управления, а к системным шинам ЭВМ контрольного процессора устройства контроля системы управления и контрольного процессора устройства самоконтроля подключены адаптеры мультиплексного канала, при этом в штатном режиме работы комплекса через адаптер мультиплексного канала контрольного процессора устройства контроля системы управления осуществляется информационный обмен с бортовой ЭВМ системы управления БПЛА, а в режиме самоконтроля через адаптеры мультиплексных каналов осуществляется информационный обмен между контрольными процессорами устройства контроля системы управления и устройства самоконтроля, кроме этого, входы релейных передатчиков команд и выходы устройств гальванической развязки устройства контроля системы управления, устройства контроля электрооборудования и устройства самоконтроля соединены соответственно с выходами сигналов управления релейными передатчиками и входами чтения релейных сигналов устройства дискретного ввода-вывода соответствующего контрольного процессора, а выходы релейных передатчиков команд, образующие выходы команд, и входы устройств гальванической развязки, образующие входы релейных сигналов устройства контроля системы управления, устройства контроля электрооборудования и устройства самоконтроля, соединены с соответствующими входами и выходами устройства коммутации,
в состав дополнительно введена упомянутая ИСППР, состоящая из БЗ в виде модулей МКОКПК, МЭЗ, МБП, МФОППД и МПН на основе математического аппарата БСД, а также интерфейса взаимодействия с пользователями и ЛПР, БД, процессора для координации и управления работой БЗ и БД, и интерфейса взаимодействия с концентратором ЛВС, вход которого соединен с концентратором ЛВС посредством внешней системной интерфейсной магистрали информационного обмена ИСППР, а выход через внутреннюю системную интерфейсную магистраль информационного обмена ИСППР - с входами-выходами упомянутых БЗ, БД, интерфейса взаимодействия с пользователями и ЛПР и процессора, при этом вход-выход МКОКПК соединен с первым входом-выходом МЭЗ, второй вход-выход МЭЗ соединен с первым входом-выходом МБП, второй вход-выход которого соединен с первым входом МФОППД, третий вход-выход МЭЗ соединен со вторым входом-выходом МЛН на основе математического аппарата БСД, первый вход-выход которого соединен с третьим входом-выходом МФОППД, а четвертый вход-выход МЭЗ соединен со вторым входом-выходом упомянутого МФОППД, кроме того, комплекс снабжен УГЭП для электропитания его составных частей.
Сущность заявляемого изобретения поясняется чертежами, на которых представлены:
фиг.1 - структурная схема комплекса КПА БС БПЛА,
фиг.2 - обобщенная структурная схема БС БПЛА,
фиг.3 - структурная схема устройства коммутации,
фиг.4 - структурная схема имитатора цели,
фиг.5 - структурная схема устройства контроля системы управления,
фиг.6 - структурная схема устройства контроля электрооборудования,
фиг.7 - структурная схема устройства самоконтроля,
фиг.8 - структурная схема устройства гарантированного электропитания,
фиг.9 - структурная схема пульта управления,
фиг.10 - структурная схема базы знаний.
На фиг.1 структурной схемы комплекса КПА БС БПЛА приняты следующие обозначения:
1 - контрольная антенна,
2 - БС БПЛА (объект проверки),
3 - устройство коммутации,
4 - имитатор цели,
5 - устройство контроля системы управления,
6 - устройство контроля электрооборудования,
7 - устройство самоконтроля,
8 - устройство гарантированного электропитания,
9 - концентратор локальной вычислительной сети (ЛВС),
10 - пульт управления,
11, 12, 13, 14 - интерфейсные магистрали информационного обмена, выполненные в виде магистралей Ethernet или PCI,
15 - внешняя (по отношению к ИСППР) интерфейсная магистраль информационного обмена ИСППР, выполненная в виде магистрали Ethernet или PCI,
16 - внутренняя (по отношению к ИСППР) интерфейсная магистраль информационного обмена ИСППР, выполненная в виде магистрали Ethernet или PCI,
17 - интерфейсная магистраль мультиплексного канала информационного обмена (Манчестер),
18, 19, 20 - интерфейсная магистраль последовательного информационного канала (RS 485),
21 - кабель релейного канала связи с устройством телеметрии,
22 - кабель соединительных цепей для подключения к контрольным точкам электрооборудования,
23 - кабель передающего релейного канала,
24 - кабель приемного релейного канала,
25 - интеллектуальная система поддержки принятия решений,
26 - база знаний,
27 - база данных,
28 - интерфейс взаимодействия с концентратором ЛВС,
29 - процессор (для координации и управления работой базами знаний и данных),
30 - интерфейс взаимодействия с пользователями и ЛПР.
Согласно фиг.1 контрольная антенна 1 конструктивно объединена с имитатором цели 4 и связана радиоканалом с БС БПЛА 2, а именно с антенной радиолокационного визира системы управления* (+) на схеме не показан) БС БПЛА 2. Первый вход, первый и второй выходы БС БПЛА 2 конструктивно выполнены в виде бортового разъема*, к которому подключен кабель передающего релейного канала 23, соединенный с первым выходом устройства коммутации 3, кабель соединительных цепей для подключения к контрольным точкам электрооборудования 22, соединенный с первым входом устройства коммутации 3, и кабель приемного релейного канала 24, соединенный со вторым входом устройства коммутации 3 соответственно.
Третий выход БПЛА 2, с которого передается сигнал опорной частоты радиолокационного визира*, соединен с опорным (Оп) входом имитатора цели 4, четвертый вход-выход посредством интерфейсной магистрали мультиплексного канала информационного обмена 17 соединен с третьим входом-выходом устройства контроля системы управления 5, а пятый выход посредством кабеля релейного канала связи с устройством телеметрии 21 подключен ко второму входу устройства контроля системы управления 5.
Вход устройства гарантированного электропитания 8 соединен с источником сетевого напряжения (сеть)*, а выход - со входами питания (Пит) устройства контроля системы управления 5, устройства контроля электрооборудования 6, устройства самоконтроля 7 и пульта управления 10.
Вход последовательного интерфейса пульта управления 10 соединен посредством интерфейсных магистралей 18, 19 и 20 последовательных каналов с выходами последовательного интерфейса устройства контроля системы управления 5, устройства контроля электрооборудования 6 и устройства самоконтроля 7, объединенных в сеть с пультом управления 10 посредством
интерфейсных магистралей информационного обмена 11, 12, 13 и 14, соединенных в концентраторе ЛВС 9 по схеме «звезда».
Второй выход устройства контроля системы управления 5 подключен к управляющему входу (У) имитатора цели 4, а его первый выход и выход устройства контроля электрооборудования 6 соединены с третьим входом устройства коммутации 3, второй выход которого соединен со вторым входом устройства контроля электрооборудования 6, а третий - с первыми входами устройства контроля системы управления 5 и устройства контроля электрооборудования 6.
Первый, второй и третий выходы устройства самоконтроля 7 соединены соответственно с четвертым входом, управляющим входом (У) и пятым входом устройства коммутации 3, четвертый выход которого подключен к первому входу устройства самоконтроля 7. Четвертый вход-выход устройства самоконтроля 7 является входом-выходом мультиплексного канала информационного обмена.
Вход интерфейса взаимодействия с концентратором ЛВС 28 ИСППР 25 соединен с концентратором ЛВС 9 посредством внешней (по отношению к ИСППР 25) системной интерфейсной магистрали информационного обмена ИСППР 15, а выход интерфейса 28 через внутреннюю (по отношению к ИСППР 25) системную интерфейсную магистраль информационного обмена ИСППР 16 - входами-выходами с базы знаний 26, базы данных 27, интерфейса взаимодействия с пользователями и ЛПР 30 и процессора 29 упомянутой ИСППР 25.
На фиг.2 обобщенной структурной схемы БС БПЛА приняты следующие обозначения:
31 - антенна радиолокационного визира,
32 - система управления, включающая визир*, датчик угловых скоростей*, инерциальный блок* и устройство выработки сигналов управления* на базе бортовой ЭВМ*,
33 - устройство телеметрии,
34 - электротехническое оборудование БС БПЛА (далее - электрооборудование),
35 - кроссировочное устройство, выполненное в виде наборов клеммных плат с монтажными перемычками,
36 - рулевые агрегаты.
Согласно фиг.2 антенна 31 соединена с системой управления 32, а именно с радиолокационным визиром, выход которого по сигналу опорной частоты образует третий выход БС БПЛА 2. Вход-выход бортовой ЭВМ системы управления 32 образует четвертый выход БС БПЛА 2, а выход устройства выработки сигналов управления системы управления 32 подключен ко входу рулевых агрегатов 36.
Входы устройства телеметрии 33 по сигналам контролируемых параметров соединены с выходами электрооборудования 34 и системы управления 32, а его выход образует пятый выход БС БПЛА 2.
Цепи от контрольных точек электрооборудования 34, а также цепи входных и выходных сигналов релейных устройств системы управления 32, электрооборудования 34 и рулевых агрегатов 36 соединены с соответствующими клеммами кроссировочного устройства 35, три внешних вывода которого образуют первый и второй выходы и первый вход бортразъема БС БПЛА 2.
На фиг.3 структурной схемы устройства коммутации приняты следующие обозначения:
37 - переключатель контрольных точек,
38 - переключатель команд,
39 - переключатель сигналов.
Переключатели 37, 38 и 39 выполнены в виде однотипных блоков реле, управляемых параллельным двухпозиционным кодом, поступающим на управляющие входы переключателей 37, 38 и 39 через управляющий вход устройства коммутации 3. Примером выполнения переключателей 37, 38 и 39 может служить плата коммутации PCLD-785 фирмы Advantech.
Согласно фиг.3 первый и второй входы переключателя контрольных точек 37 соединены соответственно с первым и пятым входами устройства коммутации 3, а его вход образует второй выход устройства коммутации 3, третьим выходом которого служит выход переключателя сигналов 39.
Первый и второй входы переключателя сигналов 39 образуют соответственно второй и четвертый входы устройства коммутации 3. Третьим входом устройства коммутации 3 служит вход переключателя команд 38, первый и второй выходы которого образуют соответственно первый и четвертый выходы устройства коммутации 3.
Управляющие входы (Упр) переключателей 37, 38 и 39 подключены к управляющему входу (У) устройства коммутации 3.
На фиг.4 структурной схемы имитатора цели приняты условные обозначения:
40 - циркулятор,
41 - первый преобразователь частоты,
42 - первый усилитель промежуточной частоты,
43 - линия задержки,
44 - второй усилитель промежуточной частоты,
45 - второй преобразователь частоты.
Согласно фиг.4 первое плечо циркулятора 40 соединено с контрольной антенной 1, второе - с сигнальным входом первого преобразователя частоты 41, а третье - с выходом второго преобразователя частоты 45, опорный вход которого и опорный вход первого преобразователя частоты 41 соединены с опорным входом имитатора цели 4. Выход первого преобразователя частоты 41 через последовательно включенные первый усилитель промежуточной частоты 42, линию задержки 43 и второй усилитель промежуточной частоты 44 соединены с сигнальным входом второго преобразователя частоты 45.
Входы опорного напряжения питания усилителей промежуточной частоты 42 и 44 подключены к управляющему входу имитатора цели 4.
На фиг.5 структурной схемы устройства контроля системы управления приняты следующие обозначения:
46 - блок включения имитатора цели 4, выполненный например, в виде платы релейной коммутации PCLD-885 фирмы Advantech (БВИЦ),
47 - адаптер мультиплексного канала,
48 - мультиплексор, выполненный например, в виде платы релейной коммутации PCLD-788 фирмы Advantech,
49 - передатчик команд, выполненный, например, в виде модуля релейной коммутации 5610 фирмы OCTAGON SYSTEM,
50 - устройство дискретного ввода-вывода, выполненное, например, в виде платы типа PCLD-1753 фирмы Advantech,
51 - устройство гальванической развязки, выполненное, например, в виде модуля дискретного ввода 70L-IDC Grayhill,
52 - ЭВМ, выполненная, например, на основе процессорной платы РСА-6168Е фирмы Advantech,
53 - устройство мониторинга (плата PCL-752), включающее процессор, встроенный сторожевой таймер для контроля процессора ЭВМ, устройство гальванической развязки, резервный источник питания, последовательный порт RS-485 и звуковой индикатор тревоги,
54 - адаптер локальной сети,
55 - источник вторичного электропитания, например, типа RPS 300 фирмы Advantech,
56 - системная интерфейсная магистраль,
57 - устройство аналого-цифрового преобразования, например, типа PCL-818HG.
Согласно фиг.5 к системной интерфейсной магистрали 56 подключены ЭВМ 52, адаптер локальной сети 54, соединенный с интерфейсной магистралью информационного обмена 11, устройство мониторинга 53, соединенное с интерфейсной магистралью последовательного канала 18, адаптер мультиплексного канала 47, соединенный с интерфейсной магистралью мультиплексного канала информационного обмена 17, устройство аналого-цифрового преобразования 57 и устройство дискретного ввода-вывода 50.
Вход устройства гальванической развязки 51 является первым входом устройства контроля системы управления 5, а его вход подключен к входу устройства дискретного ввода-вывода 50, к первому и второму выходам которого подключены соответственно передатчик команд 49 и блок включения имитатора цепи 46, выходы которых образуют первый и второй выходы устройства контроля системы управления 5.
Информационный вход мультиплексора 48 образует второй вход устройства контроля системы управления 5, а его выход и вход адреса информационного канала (А) соединены соответственно с входом и управляющим выходом устройства аналого-цифрового преобразования 57.
Источник вторичного электропитания 55 подключен ко входу питания устройства контроля системы управления 5. Схема распределения питания условно не показана.
На фиг.6 структурной схемы устройства контроля электрооборудования приняты следующие обозначения:
58 - передатчик команд,
59 - устройство дискретного ввода-вывода,
60 - устройство гальванической развязки,
61 - ЭВМ,
62 - устройство мониторинга,
63 - адаптер локальной сети,
64 - источник вторичного электропитания,
65 - системная интерфейсная магистраль (СИМ),
66 - коммутатор контрольных точек, выполненный, например, в виде платы релейной коммутации PCLD-788 фирмы Advantech,
67 - устройство измерения сопротивлений и потенциалов,
68 - преобразователь сопротивления в напряжение постоянного тока (далее - преобразователь),
69 - блок аналоговых нормализаторов, выполненный, например, в виде модуля 56М5 В41 фирмы DATA FORT,
70 - коммутатор входов, выполненный, например, в виде платы PCLD-788 фирмы Advantech,
71 - анализатор аналоговых сигналов, выполненный, например, в виде платы PCL-1800 фирмы Advantech.
Согласно фиг.6 к СИМ 65 подключены ЭВМ 61, анализатор аналоговых сигналов 71, адаптер локальной сети 63, соединенный с интерфейсной магистралью информационного обмена 12, устройство мониторинга 62, соединенное с интерфейсной магистралью последовательного канала 19, и устройство дискретного ввода-вывода 59.
Вход устройства гальванической развязки 60 является первым входом устройства контроля электрооборудования 6, а его выход подключен к входу устройства дискретного ввода-вывода 59, к первому и второму выходам которого подключены соответственно вход передатчика команд 58 и управляющий вход коммутатора контрольных точек 66. Выход передатчика команд 58 и вход коммутатора контрольных точек 66 образует соответственно выход и второй вход устройства контроля электрооборудования 6.
Выходы коммутатора контрольных точек 66 подключены ко входам преобразователя 68 и блока аналоговых нормализаторов 69, выходы которых через коммутатор 70 соединены с сигнальным входом анализатора аналоговых сигналов 71, управляющий выход которого соединен с управляющим входом (У) коммутатора входов 70, а информационный выход соединен с системной интерфейсной магистралью 56.
Источник вторичного электропитания 64 подключен ко входу питания устройства контроля электрооборудования 6.
На фиг.7 структурной схемы устройства самоконтроля приняты следующие обозначения:
72 - устройство дискретного ввода-вывода,
73 - передатчик команд,
74 - устройство гальванической развязки,
75 - ЭВМ,
76 - адаптер локальной сети,
77 - устройство мониторинга,
78 - адаптер мультиплексного канала,
79 - источник вторичного электропитания,
80 - имитатор потенциалов (источник постоянного тока), выполненный, например, в виде модуля NLP25 фирмы ARTESYN Technology,
81 - имитатор сообщений, выполненный в виде монтажной платы с набором перемычек для имитации связей между контрольными точками,
82 - кроссировочное устройство,
83 - системная интерфейсная магистраль.
Согласно фиг.7 к системной интерфейсной магистрали 83 подключены ЭВМ 75, адаптер локальной сети 76, соединенный с интерфейсной магистралью информационного обмена 13, устройство мониторинга 77, соединенное с интерфейсной магистралью последовательного канала 20, адаптер мультиплексного канала 78, вход-выход которого образует четвертый вход-выход устройства самоконтроля 7, и устройство дискретного ввода-вывода 72.
Вход устройства гальванической развязки 74 является первым входом устройства самоконтроля 7, а его выход подключен к входу устройства дискретного ввода-вывода 72, к первому выходу которого подключен передатчик команд 73, выход которого служит первым выходом устройства самоконтроля 7.
Вторым выходом устройства самоконтроля 7 является второй выход устройства дискретного ввода-вывода 72, а третьим - выход кроссировочного устройства 82, к которому подключены имитатор потенциалов 80 и имитатор сообщений 81.
Источник вторичного электропитания 79 подключен ко входу питания устройства самоконтроля 7.
На фиг.8 структурной схемы устройства гарантированного электропитания приняты следующие обозначения:
841,…,84n+1 - источники бесперебойного электропитания,
85 - панель управления,
86 - контроллер,
87 - синхронизатор фаз.
Согласно фиг.8 устройство гарантированного электропитания 8 выполнено в виде модуля, например, на основе составных элементов системы US 9001 фирмы Electronics, и включающего набор n+1 источников бесперебойного питания 84 (UPS), где n - минимальное количество источников, соответствующее потребляемой мощности. Первые входы
источников 84 подключены к первичной сети, а выходы - к соответствующим входам с первого по (n+1)-й синхронизатора фаз 87, который обеспечивает параллельную работу источников 84 на общую нагрузку. Третьи входы соответствующих источников 841,…,84n+1 подключены к соответствующим выходам с первого по (n+1)-й контроллера 86, под управлением которого происходит задействование резервного источника 84n+1 взамен вышедшего из строя. Панель управления 85, содержащая кнопки ручного управления и индикаторы, соединена соответствующими выходами с первого по (n+1)-й со вторыми входами источников 841,…,84n+1.
На фиг.9 структурной схемы пульта управления приняты следующие обозначения:
88 - центральная ЭВМ, выполненная в виде панельного компьютера с встроенным дисплеем, например, типа IPPC-9150T фирмы Advantech,
89 - клавиатура,
90 - внешний накопитель,
91 - устройство документирования,
92 - устройство преобразования интерфейсов RS 485/232 ADAM 4520 фирмы Advantech,
93 - устройство дискретного ввода-вывода,
94 - системная интерфейсная магистраль,
95 - панель управления, выполненная в виде лицевой панели с кнопками ручного ввода управляющих команд,
96 - индикаторное табло,
97 - источник вторичного электропитания.
Согласно фиг.9 к соответствующим входам центральной ЭВМ 88 подключена клавиатура 89, внешний накопитель 90, устройство документирования 91 и устройство преобразования интерфейсов 92, вход последовательного интерфейса которого соединен с интерфейсными магистралями последовательных каналов 18, 19, 20. К сетевому входу ЭВМ 88 подключена интерфейсная магистраль информационного обмена 14, а к системному входу через системную интерфейсную магистраль 94 подключено устройство дискретного ввода-вывода 93, соединенное входом с панелью управления 95, а выходом - с индикаторным табло 96.
Источник вторичного электропитания 97 подключен ко входу питания пульта управления 10.
На фиг.10 структурной схемы базы знаний приняты следующие обозначения:
98 - модуль качественной оценки критичных параметров контроля,
99 - модуль экспертных знаний,
100 - модуль библиотеки прецедентов,
101 - модуль формирования оптимальной последовательности процедур диагностирования,
102 - модуль поиска неисправностей на основе математического аппарата байесовской сети доверия.
Согласно фиг.10 интерфейс взаимодействия с концентратором ЛВС 28* ИСППР 25* соединен с входами модуля качественной оценки критичных параметров 98, модуля экспертных знаний 99, модуля библиотеки прецедентов 100, модуля формирования оптимальной последовательности процедур диагностирования 101 и модуля поиска неисправностей 102 на основе математического аппарата байесовской сети доверия базы знаний 26 посредством внутренней (по отношению к ИСППР 25*) системной интерфейсной магистрали информационного обмена ИСППР 16, при этом вход-выход модуля 98 соединен с первым входом-выходом модуля 99, второй вход-выход модуля 99 соединен с первым входом-выходом модуля 100, второй вход-выход которого соединен с первым входом-выходом модуля 101, третий вход-выход модуля 99 соединен со вторым входом-выходом модуля 102, первый вход-выход которого соединен с третьим входом-выходом модуля 101, а четвертый вход-выход модуля 99 соединен со вторым входом-выходом упомянутого модуля 101.
Заявляемый способ реализуется следующим образом.
На устройство гарантированного электропитания 8 подают питание от имеющихся на месте эксплуатации комплекса первичных источников электроэнергии. При этом устройство электропитания 8 обеспечивает стабильные значения выходных параметров независимо от помех и бросков напряжения входной сети.
Средствами пульта управления 10 производят ручное включение аппаратуры с помощью кнопок* панели управления 95, после чего клавиатура 89, дисплей ЭВМ 88 и устройство документирования 91 обеспечивают возможность использования штатных средств операционной системы для эффективного взаимодействия с оператором при каждом из предусмотренных режимов работы комплекса.
Аппаратура пульта управления 10 обеспечивает управление процессом контроля, координацию работы всего оборудования комплекса, визуальное отображение процесса контроля, его промежуточных и окончательных результатов, документирование результатов контроля, аварийное отключение электропитания и работу в качестве экспертной системы.
Программно-математическое обеспечение размещается на флеш-дисках ЭВМ 52, 61, 75. Координация работы устройства контроля системы управления 5, устройства контроля электрооборудования 6 и устройства самоконтроля 7 обеспечивается центральной ЭВМ 88, которая связана интерфейсной магистралью 14 с концентратором локальной сети 9, соединенным посредством интерфейсных магистралей 11, 12, 13 и адаптеров 54, 63, 76 соответственно с ЭВМ 52, 61, 75. Непрерывный контроль состояния вычислительных систем
устройств 5, 6 и 7 производится устройствами мониторинга 53, 62, 77, связанными на базе интерфейса RS-485 с центральной ЭВМ 88.
Производят исходное тестирование центральной ЭВМ 88 и ЭВМ 52, 61, 75, контрольных устройств 5, 6 и 7, загрузку базового и технологического программного обеспечения из внешнего накопителя 90, в дальнейшем накопитель 90 может быть использован для корректировки программно-математического обеспечения при возникновении изменений в процессе эксплуатации комплекса, штатный контроль БС БПЛА 2 и самоконтроль комплекса, включающие проверку электротехнических систем, проверку релейных устройств коммутации, наличие соединений между контрольными точками электрооборудования 34, проверку системы управления БПЛА 32, проверку бортовых вычислительных устройств*, проверку радиотехнических устройств*, анализ сигналов, относящихся к телеметрии, проверку прохождения команд, формируемых устройством контроля системы управления 5, проверку аппаратуры взаимодействия* с вычислительными устройствами* системы управления БПЛА 32, координацию работы всего оборудования упомянутого комплекса, управление процессом контроля и диагностирования, визуальное отображение его промежуточных и окончательных результатов, а также документирование и выдачу этих результатов пользователям, (более подробно см. описание работы комплекса)
Указанные результаты в виде упорядоченных конечных последовательностей числовых значений параметров, лингвистических оценок параметров и результатов проверок, и характеризующих техническое состояние контролируемых БС БПЛА 2, являются исходными данными для интеллектуальной обработки.
Для обеспечения возможности машинной обработки, качественные оценки результатов тестовых проверок и значений параметров перекодируют в булевские переменные: «в норме» - 0, «не в норме» - 1, «годен» - 0, «не годен» - 1. Далее производят преобразование исходных данных в формат базы данных 27 для их сохранения и последующей обработки.
Качественную оценку параметров контроля производят по специальному алгоритму (методике проведения классификации) А: Х→В, способному классифицировать произвольный параметр х∈Х,
где: А - алгоритм методики проведения классификации,
Х - значимый параметр системы,
В - состояние параметра работоспособной системы,
X={x1,x2,…,xp} - множество наиболее значимых параметров, адекватно передающих итоговую картину качества изделия,
B={B1,…,Bs} - множество возможных состоянии параметра работоспособной системы, которое разбито на ряд классов. Алгоритм построен на основе экспертных знаний, математического аппарата теории нечетких множеств, дискретной математики (теории множеств) и продукционных правил представления знаний и логического вывода. Результаты классификации представляют в виде, удобном для восприятия лицом, принимающим решение (ЛПР), на их основе ЛПР производит оценку запаса работоспособности технической системы и принимает более обоснованные решения об упреждающей настройке, дополнительной регулировке и отладке взаимодействия составных частей БС БПЛА 2, а в случае необходимости об их замене, в целях обеспечения запаса работоспособности всего БПЛА и уменьшения риска потребителя. Повышение точности и достоверности результатов комплексной проверки БС БПЛА 2 достигается за счет использования двухступенчатой структуры проведения оценки работоспособности, которая включает как измерительные средства комплекса, так и средства интеллектуальной системы поддержки принятия решений 25.
Формирование оптимальной последовательности процедур диагностирования БС БПЛА 2 в условиях неопределенности информации о неисправных составных частях производят с использованием двух методов теории искусственного интеллекта, основанных на разных концепциях представления и обработки знаний с целью получения более качественных результатов. Такой подход, основанный на синергетической комбинации двух методов, позволяет эффективно использовать их преимущества и, в то же время, преодолевать некоторые недостатки.
Один из методов основан на использовании математического аппарата байесовских сетей доверия (БСД). Он дает возможность моделирования редких событий и довольно продуктивен при необходимости учета априорных суждений экспертов, а также в условиях отсутствия достаточного объема статистических данных. БСД построена таким образом, что ненаблюдаемые переменные (составные части БПЛА) находятся в корневых узлах ациклического графа, а наблюдаемые (тестовые проверки) располагаются в нижнем уровне сети. Между узлами сети установлены причинно-следственные связи. Количественно БСД представлена в виде множества таблиц условных вероятностей. Диагностическая модель, построенная на основе БСД, используется для вывода суждений, основанных на поступившей информации о результатах прохождения тестовых проверок. По результатам тестирования в диагностической модели производят установку значений переменных B1,…,Bn, соответствующих результатам тестовой проверки. Вывод производят на основе изменения степеней доверия к другим случайным переменным A1,…,Am, соответствующим состоянию неработоспособности каждой составной части БПЛА. Информация, приходящая в наблюдаемые переменные, распространяется внутри байесовской сети и изменяет вероятностные распределения ненаблюдаемых переменных. Вычисление вероятностей неработоспособности составных частей технической системы дает возможность их ранжировать и сравнивать. Алгоритм формирования оптимальной последовательности процедур диагностирования БС БПЛА 2 представляет собой следующую последовательность шагов.
Шаг 1. Получают информацию о результатах тестовых проверок и устанавливают соответствующие значения переменных B1,…,Bn БСД.
Шаг 2. Вычисляют апостериорные вероятности отказа составных частей БПЛА A1,…,Am в соответствии с установленными значениями переменных B1,…,Bn.
Шаг 3. Сортируют вычисленные вероятности отказа составных частей БПЛА A1,…,Am в направлении убывания их значений.
Второй метод реализует механизм правдоподобных рассуждений на основе прецедентов.
Вывод, основанный на прецедентах, позволяет получить решение неизвестной задачи, используя накопленный опыт решения сходных задач, хранящийся в модуле библиотеки прецедентов 100 базы знаний 26, и адаптировать его к новым условиям.
Алгоритм формирования оптимальной последовательности процедур диагностирования составных частей БПЛА представляет собой следующую последовательность шагов.
Шаг 1. Получают информацию о результатах тестовых проверок, представленную в виде двоичных последовательностей, характеризующих состояние параметров и проверок.
Шаг 2. Проводят поиск прецедентов, наиболее близких к текущей проблеме. Поскольку исходная информация представлена упорядоченными двоичными последовательностями значений параметров, используют модифицированный метод ближайшего соседа для определения расстояния между текущей ситуацией и ситуацией, описанной в прецеденте. Для определения метрического расстояния на множестве параметров, используемых для описания текущего состояния отказа и прецедента, применяют метрику Хэмминга.
Предлагаемая модификация заключается в том, что вводятся настройки, входящие в состав прецедента и модуля библиотеки прецедентов 100, и применяется механизм поиска, основанный на методе логического дедуктивного вывода от общего к частному. Выявленные закономерности позволяют квалифицированным специалистам определять этапы процесса поиска неисправностей, содержание этих этапов, а также учитывать особенности функционирования комплекса, с использованием трехуровневой иерархической модели поиска похожих прецедентов. Классификация параметров позволяет объединить их в подмножества, соответствующие заданной глубине поиска. При диагнозе малой глубины (1-й уровень глубины поиска) в качестве параметров используют значения тестовых проверок. При диагнозе большой глубины (3-й уровень) - значения параметров. При диагнозе средней глубины (2-ой уровень) используют некоторую часть значений параметров совместно с группами параметров, объединяющих другую их часть. Состав параметров 2-го уровня определяют эксперты на основании их знаний. Алгоритмическую модель вычислений, базирующуюся на ветвлениях по значениям параметров, задают ориентированным ациклическим графом, имеющим иерархическую структуру, тем самым повышают точность и производительность поиска решения.
Настройки в структуре прецедента и модуля библиотеки прецедентов 100 предназначены для их поддержки в актуальном состоянии и используются в решающих правилах правдоподобного вывода. Множество весовых коэффициентов WX позволяет учитывать относительную ценность каждого параметра при извлечении прецедентов из модуля 100.
WX={WX1,WX2,WX3} - множество весовых коэффициентов, учитывающих относительную ценность каждого параметра прецедента, и соответствующих 1, 2 или 3-му уровню глубины поиска,
где: W - числовая оценка веса прецедента, характеризующая его применимость, и учитываемая в процессе формирования ранжированного списка прецедентов при равенстве метрических расстояний инцидента со сходными прецедентами,
х - наиболее значимый параметр системы, значения весовых коэффициентов задаются экспертом от 0 до 1,
WX1={WX11,…,WX1к}
WX2={WX21,…,WX1m}
WX3={WX31,…,WX3j},
где: к - количество параметров 1-го уровня глубины поиска,
m - количество параметров 2-го уровня глубины поиска,
j - количество параметров 3-го уровня глубины поиска.
Кроме того, экспертом задаются настройки -
a) V={V1,V2,V3} - множество пороговых значений, ограничивающих допустимые расстояния между прецедентами и инцидентами, рассчитанные модифицированным методом ближайшего соседа на основе метрики Хэмминга для 1, 2 или 3-го уровня глубины поиска,
где: V - пороговое значение, ограничивающее расстояние между прецедентами и инцидентами.
V применяют на этапе выбора подходящих прецедентов, значение порога определяют для каждого уровня глубины поиска на основании правил продукционного типа, при этом данная настройка в структуре прецедента влияет на выбор извлекаемых прецедентов и позволяет учитывать предысторию их применения (адаптации) с точки зрения результативности (успешности);
б) О - ограничитель списка прецедентов, используют на этапе формирования окончательного состава предлагаемого решения. Числовое значение О уменьшает количество рассматриваемых прецедентов, ранжированных по возрастанию метрических расстояний и с учетом W каждого прецедента. В результате 3-х уровневого поиска формируют набор сходных прецедентов.
Шаг 3. Производят упорядочивание набора сходных прецедентов по возрастанию значений метрических расстояний, которые рассчитывают по формуле:

где: d1, d2, d3 - расстояния между прецедентами и инцидентами, соответствующих 1, 2 и 3-му уровням,
Х1, Х2, Х3 - множество параметров технической системы, описывающее данный прецедент в булевском формате, соответствующее 1, 2 и 3-му) уровню глубины поиска,
X1t, X2t, X3t - множество параметров, характеризующих текущее состояние отказа,
в случае равенства значений похожих прецедентов ранжирование осуществляют на основании W каждого прецедента.
Окончательный состав предлагаемого решения получают в результате ограничения количества рассматриваемых прецедентов числовым значением О.
Шаг 4. Производят повторное извлечение прецедентов в случае отсутствия решения. В этом случае, в режиме диалога с вычислительной системой, пересматривают условия поиска в сторону уменьшения точности, посредством временного изменения значений настроек V1, V2, V3 в алгоритме поиска.
Результаты вероятностного вывода на основе БСД и правдоподобного вывода на основе прецедентов являются исходными данными для окончательного формирования оптимальной последовательности процедур диагностирования составных частей БПЛА, которое осуществляется с использованием правил продукционного типа.
На основе полученного ЛПР решения производит оценку проблемной ситуации и принимает более обоснованное решение о последовательности демонтажа составных частей для проведения их дальнейшего диагностирования на специализированных стендах*.
Формирование ранжированного списка прецедентов, наиболее близких к текущему инциденту, производят с использованием описанного выше механизма правдоподобных рассуждений на основе прецедентов. Каждый прецедент представляет собой модуль знаний, в котором структурирована вся доступная диагностическая информация о проблеме, решении и контексте, состоящий из характеристик, имеющих разный формат: числовой, булевский и описательный в виде текстового комментария. Полученное решение представляют в виде, удобном для восприятия ЛПР, на его основе определяют место (конкретный узел, блок) и тип неисправностей, выявляют причинно-следственный комплекс факторов, которые привели к отказу, формируют перечень рекомендаций по обеспечению и восстановлению работоспособности БС БПЛА 2, предупреждению отказов и минимизации трудовых, временных и финансовых затрат.
Процесс адаптации базы знаний 26 имеет три уровня и осуществляется как в ручном, так и в автоматическом режиме. Параметрическая адаптация представляет собой изменение параметров моделей, составляющих базу знаний 26, а структурная адаптация - изменение состава и взаимосвязей в моделях, составляющих базу знаний 26. Адаптация к изменениям условий в процессе формирования решений представляет собой изменение алгоритма решения задачи в соответствии с изменяющимися требованиями ЛПР. Механизмы адаптации позволяют совершенствовать базу знаний 26 и поддерживать ее в актуальном состоянии, и тем самым повысить качество интеллектуальной поддержки принятия решений.
Комплекс КПА БС БПЛА с ИСППР работает следующим образом.
Проверяемые БС БПЛА 2 размещают вблизи аппаратуры комплекса на расстоянии, определяемом длиной соединительных кабелей. Непосредственно на корпусе БС БПЛА 2 перед антенной 31 радиолокационного визира закрепляют контрольную антенну 1, конструктивно объединенную с имитатором цели 4. Кабель 22 соединительных цепей и кабели 23 и 24 передающего и приемного релейных каналов подключают через бортразъем БС БПЛА 2 к его кроссировочному устройству 35, кабель мультиплексного канала информационного обмена 17 соединяют с соответствующим разъемом системы управления 32, кабель 21 подключают к выходному разъему устройства телеметрии 33, а опорный вход имитатора цели 4 соединяют с соответствующим разъемом радиолокационного визира системы управления 32.
На устройство гарантированного электропитания 8 подают питание от имеющихся на месте эксплуатации комплекса первичных источников электроэнергии*. При этом устройство электропитания 8 обеспечивает стабильные значения выходных параметров независимо от помех и бросков напряжения входной сети. При выходе из строя любого из источников 841,…,84n автоматически обеспечивается его оперативная замена источником 84n+1. Наличие в источниках 84 аккумуляторных батарей* гарантирует питание аппаратуры комплекса даже при полном отключении первичной сети в течение времени, достаточного для сохранения файлов и корректного отключения ЭВМ 52, 61, 75, 88.
Средствами пульта управления 10 выполняют следующие операции:
- ручное включение аппаратуры с помощью кнопок* панели управления 95, после чего клавиатура 89, дисплей ЭВМ 88 и устройство документирования 91 обеспечивают возможность использования штатных средств операционной системы для эффективного взаимодействия с оператором при каждом из предусмотренных режимов работы комплекса;
- исходное тестирование центральной ЭВМ 88 и ЭВМ 52, 61, 75 устройств 5, 6, 7;
- первоначальная загрузка базового и технологического программного обеспечения из внешнего накопителя 90, в дальнейшем накопитель 90 может быть использован для корректировки программно-математического обеспечения при возникновении изменений в процессе эксплуатации комплекса.
Аппаратура пульта управления 10 обеспечивает управление процессом контроля, координацию работы всего оборудования комплекса, визуальное отображение процесса контроля, его промежуточных и окончательных результатов, документирование результатов контроля, аварийное отключение электропитания и работу в качестве экспертной системы.
Программно-математическое обеспечение размещается на флеш-дисках ЭВМ 52, 61, 75. Координация работы устройства контроля системы управления 5, устройства контроля электрооборудования 6 и устройства самоконтроля 7 обеспечивается центральной ЭВМ 88, которая связана интерфейсной магистралью 14 с концентратором локальной сети 9, соединенным посредством интерфейсных магистралей 11, 12, 13 и адаптеров 54, 63, 76 соответственно с ЭВМ 52, 61, 75. Непрерывный контроль состояния вычислительных систем устройств 5, 6 и 7 производится устройствами мониторинга 53, 62, 77, связанными на базе интерфейса RS-485 с центральной ЭВМ 88.
Структура устройств, обеспечивающих в ходе проверки БС БПЛА 2 выдачу управляющих команд на релейные устройства бортовых систем и прием отдельных сигналов от исполнительных устройств, идентична и представлена релейными передатчиками команд 49, 58, 73 и устройствами гальванической развязки 51, 60 и 72 дискретного ввода-вывода с ЭВМ 52, 61 и 75.
В ходе проверки оператор задает кнопками* панели управления 95 один из основных режимов работы - штатный контроль БС БПЛА 2 или самоконтроль комплекса.
Каждый режим может выполняться в полном объеме или с ограничениями. После выбора режима с клавиатуры 89 вводят исходные данные, соответствующие характеристикам проверяемого оборудования.
При работе в режиме штатного контроля на управляющем входе устройства коммутации 3 отсутствует управляющий сигнал, и переключатели 37, 38, 39 установлены в первое положение, при котором:
- первый вход переключателя контрольных точек 37 соединен с его выходом и обеспечивает соединение первого выхода БС БПЛА 2 с входом коммутатора контрольных точек 66 устройства контроля электрооборудования 6;
- вход переключателя команд 38 соединен с его первым выходом и обеспечивает соединение выходов передатчика команд 49 устройства контроля системы управления 5 и передатчика команд 58 устройства контроля электрооборудования 6 с первым входом БС БПЛА 2;
- первый вход переключателя сигналов 39 соединен с его выходом и обеспечивает соединение второго выхода БС БПЛА 2 с входом устройства гальванической развязки 51 устройства контроля системы управления 5 и входом устройства гальванической развязки 60 устройства контроля электрооборудования 6.
В режиме штатного контроля сначала выполняют проверку электротехнических систем БС БПЛА 2 с помощью устройства контроля электрооборудования 6. Проверка исправности релейных устройств электрооборудования 34 осуществляется выдачей управляющих команд, которые формируются на соответствующих выходах передатчика команд 58 в виде напряжений постоянного тока и поступают через переключатель команд 38 по кабелю передающего релейного канала 23 на кроссировочное устройство 35, через которое распределяется на соответствующие релейные устройства электрооборудования 34. Ответные сигналы соответствующих исполнительных устройств через кроссировочное устройство 35 по кабелю приемного релейного канала 24 поступают на первый вход переключателя сигналов 39, с выхода которого передаются на соответствующие входы устройства гальванической развязки 60 устройства контроля электрооборудования 6.
С помощью устройства измерения сопротивлений и потенциалов 67 контролируют наличие или отсутствие соединений между контрольными точками электрооборудования 34, а также значения потенциалов контрольных точек. Выбор комбинации проверяемых точек для контроля сопротивлений и измерения
потенциалов производится управляющим сигналом, поступающим на управляющий вход коммутатора контрольных точек 66 со второго выхода устройства дискретного ввода-вывода 59. Далее в преобразователе 68 значения сопротивлений между выбранными контрольными точками преобразуется в напряжение постоянного тока, которое при наличии соответствующего управляющего сигнала на входе коммутатора 70 поступает на информационный вход анализатора аналоговых сигналов 71. Выбранные контрольные точки, на которых требуется изменить потенциалы, соединяются с блоком нормализаторов 69, обеспечивающих гальваническую развязку цепей, а с него через коммутатор 70 соединяются с анализатором 71. Анализатор аналоговых сигналов 71 является быстродействующим измерителем, построенным на основе аналого-цифровых преобразователей и компараторов входных сигналов. В случае появления в контролируемых точках недопустимо высоких потенциалов возникает реакция компараторов анализатора 71, вызывающая прерывание процессора ЭВМ 61 и, как следствие, снятие питания с бортовых устройств.
Следующим этапом штатного контроля является проверка исправности системы управления 32, которая выполняется устройством контроля системы управления 5. При этом проверка релейных устройств системы управления 32 производится аналогично проверке релейных устройств электрооборудования 34 с использованием для передачи команд передатчика 49, соединенного через переключатель команд 38 с кабелем передающего релейного канала 23, а для приема ответных сигналов - устройства гальванической развязки 51, соединенного через переключатель сигналов 39 с кабелем приемного релейного канала 24.
Проверку бортовых вычислительных устройств осуществляют с использованием адаптера мультиплексного канала 47 и интерфейсной магистрали мультиплексного канала информационного обмена 17.
Для проверки радиотехнических устройств в ходе выполнения контрольной задачи по команде с выхода блока включения имитатора цели 46, которая формируется в виде напряжения постоянного тока, подается опорное напряжение питания на усилители промежуточной частоты 42, 44, включая имитатор цели 4.
Имитатор цели 4, принимая на первый вход циркулятора 40 зондирующий сигнал, излученный антенной радиолокационного визира 31 и принятый контрольной антенной 1, передает его на вход первого преобразователя частоты 41, в котором складывается с сигналом опорной частоты радиолокационного визира. Далее преобразованный на промежуточную частоту сигнал усиливается в первом усилителе промежуточной частоты 42, задерживается линией задержки 43, усиливается во втором усилителе промежуточной частоты 44 и подается на вход второго преобразователя частоты 45, выполняющего обратное по отношению к преобразователю 41 частотное преобразование. Далее сигнал, соответствующий имитируемой дальности цели через циркулятор 40 подается в контрольную антенну 1 и излучается в пространство в сторону антенны радиолокационного визира 31.
В случае необходимости, определяемой исходной программой контроля, устройство контроля системы управления 5 выполняет также анализ телеметрических сигналов, поступающих на вход мультиплексора 48 по кабелю релейного канала связи 21 с устройством телеметрии 33.
Самоконтроль комплекса может выполняться в двух режимах - оперативном, обеспечивающим проверку исправности приборов и межприборных связей независимо от подключения к бортовой аппаратуре, и самоконтроля с охватом внешних связей.
Оперативный режим самоконтроля осуществляют посредством устройства самоконтроля 7, которое в начале проверки управляющей командой со второго выхода устройства дискретного ввода-вывода 72, поступающей на управляющие входы переключателей контрольных точек 37, 38, 39, устанавливает их во второе положение. При этом выход переключателя контрольных точек 37 коммутируется с его вторым входом, соединенным с выходом кроссировочного устройства 82, выход переключателя сигналов 39 коммутируется с его вторым входом, соединенным с выходом передатчика команд 73, а вход переключателя команд 38 коммутируется со своим вторым выходом, соединенным с входом устройства гальванической развязки 74.
В ходе самоконтроля устройство самоконтроля 7 по аналогии с бортовой аппаратурой воспринимает управляющие команды от устройства контроля системы управления 5 и устройства контроля электрооборудования 6 и генерирует ответные сигналы. Имитация возможных ситуаций, возникающих между контрольными точками электрооборудования 34, осуществляется с помощью имитатора потенциалов 80 и имитатора сообщений 81.
При самоконтроле с охватом внешних связей кабельные линии 22, 23 и 24 отсоединяют от соответствующих разъемов БС БПЛА 2. Кабелем 22 соединяют первый и пятый входы устройства коммутации 3, кабелем 23 соединяют его первый и четвертый выходы, а кабелем 24 - второй и четвертый входы, как показано пунктиром на фиг.1 и 3. В дальнейшем проверку выполняют так же, как при оперативном режиме самоконтроля. Отличие заключается в отсутствии управляющего сигнала на управляющих входах переключателей контрольных точек 37, 38, 39, благодаря чему они находятся в своем первом положении, как при штатном контроле БС БПЛА 2.
При необходимости проверки также и вычислительных устройств системы управления 32, обмен с которыми осуществляется по мультиплексному каналу, интерфейсную магистраль мультиплексного канала информационного обмена 17 отключают от выхода системы управления 32 и подключают к входу-выходу адаптера мультиплексного канала 78 устройства самоконтроля 7, соединяя его с адаптером мультиплексного канала 47 устройства контроля системы управления 5. Тем самым создается возможность взаимного функционирования ЭВМ 52 и 75 для проверки мультиплексного канала связи с системой управления.
Характеристики и назначение основных частей ИСППР 25 и модулей 98, 99, 100, 101 и 102 базы знаний 26.
База знаний 26 представляет собой совокупность единиц знаний, построенную с использованием специальных языков представления знаний, основанных на символьном представлении данных, состоящая из пяти модулей 98, 99, 100, 101, 102 и предназначена для хранения этих знаний.
Модуль качественной оценки критичных параметров контроля 98 предназначен для решения задачи своевременного выявления предотказных состояний БС БПЛА 2, проведения упреждающего диагностирования и классификации контролируемых параметров. Работа модуля 98 основана на теории нечетких множеств и предполагает разделение области допустимых значений параметра, имеющего лингвистическую оценку «годен», на классы, характеризующие степень, которая выражает эту оценку. Множество допустимых значений параметра представляют в виде нечеткой переменной. Применение модуля 98 позволяет автоматизировать процесс анализа и обработки исходных данных, интерпретации результатов контроля, перевода количественных значений параметров в качественные оценки, выраженные на естественном языке, сохраняя при этом семантическую достоверность экспертных оценок. На их основе лицо, принимающее решение (ЛПР) производит оценку запаса работоспособности БС БПЛА 2 и принимает более обоснованные решения об упреждающей настройке, дополнительной регулировке и отладке взаимодействия составных частей этой системы, снижая уровень риска потребителя. Результаты работы алгоритма классификации могут быть также использованы при решении целого ряда как прикладных, так и исследовательских задач.
Кроме того, применение модуля качественной оценки критичных параметров контроля 98 в системах контроля и диагностирования позволяет получить исходные данные для решения следующих практических задач:
- повышение достоверности контроля и уменьшение трудозатрат на проведение контроля;
- повышение производительности контроля за счет сокращения времени на анализ результатов тестовых проверок;
- обнаружение предотказных состояний системы на очень ранних стадиях развития дефекта;
- оценка эффективности различных управляющих воздействий и прогнозирования их последствий;
- прогнозирование технического состояния БС БПЛА 2 и ее составных частей, дефектов и предотказных состояний в различных условиях эксплуатации;
- анализ влияния различных внешних факторов на параметры системы, качество ее функционирования, свойства системы и ее отдельных составных частей во время производственных испытаний и степени ее устойчивости к этим воздействиям;
- определение степени совершенства конструкции, технологии производства, правильности выбора номиналов элементов, схемных решений, режимов работы;
- принятие более обоснованных решений о пригодности БС БПЛА 2 к эксплуатации, об упреждающей настройке, регулировке запаса работоспособности ее составных частей и отладке их взаимодействия;
- оценка износа сложных систем, имеющих значительный срок эксплуатации, для продления их срока службы с возможной заменой отдельных блоков и узлов;
- переход от системы планово-предупредительного ремонта и технического обслуживания к стратегии управления эксплуатационной надежностью системы по ее фактическому техническому состоянию;
- анализ причин отказов технической системы;
- оптимизация программы, схемы и объема контроля, с учетом специфики работы каждой конкретной системы, ее составных частей в конкретных условиях производства и эксплуатации;
- мониторинг развития опасных тенденций изменения параметров для выявления потенциально дефектных составных частей системы, оптимизация номенклатуры и количества запасных частей, узлов и материалов.
Положительный эффект использования результатов классификации может быть усилен при применении ИПИ-технологии интеграции данных о БС БПЛА 2
Основными практическими достоинствами нечетко-множественного подхода к построению модуля 98 являются:
- возможность формализирования в единой форме и использования всей доступной неоднородной информации - детерминированной (измеренные значения параметров), статистической (статистические законы распределения для отдельных значений параметров), лингвистической (приближенные, субъективные оценки специалистов, выраженные с помощью нечетких понятий, отношений и высказываний профессионального языка) и интервальной (допустимые интервалы изменения значений параметров);
- способность получения приемлемых результатов при высокой степени неопределенности исходной информации;
- гибкость, позволяющая согласовывать степень точности решения с требованиями задачи и точностью имеющихся данных;
- возможность последующего усовершенствования модели по мере поступления новых данных;
- возможность предоставления качественной оценки исходной информации для принятия решения в виде понятий, являющихся следствием человеческого мышления, приближенного характера умозаключений и их лингвистического представления;
- способность обеспечения логической прозрачности процесса моделирования.
Одним из недостатков известного комплекса контроля технического состояния БС БПЛА 2, описанных в критике прототипа при обнаружении неисправности, является сложность принятия решений по результатам контроля, когда значения параметров находятся около границ допусков, разделяющих два крайних состояния, характеризуемых лингвистическими оценками «годен» и «не годен». Такая ситуация типична для реальных систем, когда граница между двумя качественными состояниями параметра, имеющего лингвистическую оценку «годен», например, «удовлетворительно велико» и «опасно велико» является нечеткой, размытой. В таких случаях решающую роль играет высокая квалификация опытных специалистов, которая позволяет выдвигать рациональные предположения, находить перспективные подходы к решению задач и эффективно работать при наличии неопределенностей различной степени и характера.
Целью работы модуля 98 является повышение качества контроля технического состояния при отсутствии достаточной статистики, расширение функциональных возможностей средств технического контроля за счет использования современного метода анализа данных, позволяющего осуществлять информационную поддержку принятия решений на основе предварительной обработки и представления исходных данных, решать слабо -структурированные и трудноформализуемые задачи.
Модуль экспертных знаний 99 представляет собой совокупность формул, решающих правил и алгоритмов и предназначен для обеспечения работы модуля библиотеки прецедентов 100.
Модуль библиотеки прецедентов 100 реализует один из методов интеллектуального анализа данных (Data Mining) - метод моделирования рассуждений на основе прецедентов (CBR - Case-based Reasoning). Вывод, основанный на прецедентах, является моделью управления знаниями в ИСППР 25 и позволяет получить решение неизвестной задачи, используя накопленный опыт решения похожих задач, хранящийся в библиотеке прецедентов, и адаптировать его к новым условиям. Вывод на основе прецедентов показал свою эффективность в случаях, когда отсутствует возможность полного математического описания предметной области и основным источником знаний для решения задач является опыт. Следует отметить, что полученное на основе метода решение не является гарантированно верным, а служит лишь отправной точкой процесса поиска правильного решения. Интуитивно понятно, что правильнее начинать с какого-то приблизительного решения в условиях отсутствия четкого варианта действий. Такой подход к принятию решений основан на многолетней практике работы высококвалифицированных специалистов при диагностировании сложных систем.
Данный модуль 100 формирует исходные данные для поиска неисправностей, ремонта и обслуживания БС БПЛА 2, а также для анализа, обоснования, разработки и проектирования новых конструкций, методов и средств контроля и диагностирования.
Модуль 100 применяется при решении следующих прикладных и исследовательских задач, возникающих в процессе жизненного цикла изделия:
- повышение производительности диагностирования за счет использования накопленного опыта (ранее принятых решений по поиску неисправностей);
- оценка эффективности различных управляющих воздействий и прогнозирования их последствий;
- анализ влияния различных внешних факторов на параметры БС БПЛА 2, качество ее функционирования, свойства системы и ее отдельных составных частей во время производственных испытаний и степени ее устойчивости к этим воздействиям;
- определение степени совершенства конструкции, технологии производства, правильности выбора номиналов элементов, схемных решений и режимов работы;
- анализ причин отказов технической системы.
Модуль библиотеки прецедентов 100 выполняет следующие функции:
- формирование оптимальной последовательности проведения процесса контроля и диагностирования при неполном обнаружении неисправности;
- описание состояния отказа БС БПЛА 2 по имеющейся информации;
- выявление причинно-следственного комплекса факторов, которые привели к отказу;
- адаптация библиотеки прецедентов;
- рекомендация мер по обеспечению и восстановлению работоспособности системы, предупреждению отказов и минимизации трудовых, временных и финансовых затрат.
Модуль формирования оптимальной последовательности процедур диагностирования 101 решает задачу выбора оптимальной последовательности проведения процесса контроля и диагностирования при неполном обнаружении неисправности. Для ее решения существует подход, основанный на синергетической комбинации двух методов, позволяющий эффективно использовать их преимущества и, в то же время, преодолевать некоторые недостатки. Один из методов основан на использовании математического аппарата байесовских сетей доверия (БСД).
Второй метод реализует механизм правдоподобных рассуждений на основе прецедентов.
Результаты двух программных методов обрабатываются модулем формирования оптимальной последовательности процедур диагностирования 101, который формирует окончательный ранжированный список решений ЛПР.
Модуль поиска неисправностей 102 на основе математического аппарата байесовской сети доверия обеспечивает возможность локализации неисправности до конкретной составной части, при некоторых сочетаниях итогов проверок.
Работа модуля 102 основана на использовании математического аппарата байесовских сетей доверия, который дает возможность моделирования редких событий и довольно продуктивен при необходимости учета априорных суждений экспертов, а также в условиях отсутствия достаточного объема статистических данных.
База данных 27 предназначена для хранения поступившей информации и имеет табличную структуру, где каждая строка включает данные об одном отказе, а столбцы содержат его характеристики. Процесс диагностирования, отказавшей
технической системы, может занимать достаточно продолжительный период времени. В течение этого времени в базе данных накапливаются сведения о последующих отказных состояниях, диагностируемых бортовых систем БПЛА 2. По мере адаптации прецедента, строки таблицы заполняются, после заполнения строки полностью, по команде пользователя комплекса, ее содержание заносится в модуль библиотеки прецедентов 100, а затем она удаляется.
Интерфейс взаимодействия с концентратором ЛВС 28 предназначен для обеспечения информационной, электрической и конструктивной совместимости базы данных с другими устройствами и узлами комплекса и реализации их взаимодействия. Посредством программных средств интерфейса 28 осуществляют предварительную обработку и преобразование результатов измерений в формат базы данных 26.
Процессор 29 координирует и поддерживает работу основных составных частей интеллектуальной системы поддержки принятия решений (ИСППР) 25, выполняет функции управления базой данных 27 и позволяет обновлять, модифицировать, хранить, извлекать, поддерживать обмен данными, осуществлять контроль доступа к данным и их восстановление после любого аппаратного или программного сбоя. Процессор 29 также выполняет функции управления модулями 98, 99, 100, 101 и 102 базы знаний 26, производит различные операции над информацией в базе знаний 26, и обеспечивает возможность взаимодействия с ней пользователей, например инженера по знаниям.
Интерфейс взаимодействия с пользователями и ЛПР 30 переводит машинное представление результатов обработки в удобный для пользователей и внешних систем формат и, наоборот, воспринимает сообщения пользователей и внешних систем и преобразует их в форму представления базы знаний или в формат, соответствующий программе процессора 29.
Интерфейс 30 включает в себя коммуникационные механизмы для связи и обмена информацией в рамках жизненного цикла выпускаемого изделия, а также между аналогичными ИСППР, что обуславливает необходимость разработки унифицированных протоколов обмена информацией в таких устройствах. Наличие таких информационных связей дает основу для индивидуального сопровождения каждого изделия в процессе его жизненного цикла, обмена накопленным опытом, позволяющим эффективно совершенствовать базу знаний 26, а также своевременно принимать корректирующие решения.
ИСППР 25 может функционировать в режиме приобретения и адаптации знаний и в режиме решения задач с использованием данных, полученных от других устройств комплекса через интерфейс взаимодействия с концентратором ЛВС 28.
При работе в режиме приобретения и адаптации знаний пользователь (эксперт с помощью инженера по знаниям) посредством интерфейса взаимодействия с пользователями и ЛПР 30 через локальные сети и Интернет, соединенного внутренней системной интерфейсной магистралью информационного обмена 16 типа PCI с процессором 29, базой данных 27 и модулями 98, 99, 100, 101 и 102 базы знаний 26, вводит данные и знания. Введенная информация поступает в процессор 29, который выполняет функции координации и управления работой базы знаний 26 и базы данных 27 и осуществляет запись этой информации в базу знаний 26 и в базу данных 27.
При работе в режиме решения задач данные измерений поступают в интерфейс взаимодействия с концентратором ЛВС 28 по внешней интерфейсной магистрали информационного обмена 15 типа PCI. Эти данные представляют собой упорядоченные конечные последовательности числовых значений параметров, лингвистических оценок параметров и результатов проверок. Для обеспечения возможности машинной обработки, качественные оценки результатов тестовых проверок и значений параметров перекодируются в булевские переменные: «в норме» - 0, «не в норме» - 1, «годен» - 0, «не годен» - 1. Далее преобразованные данные измерений по внутренней системной интерфейсной магистрали 16 поступают в процессор 29, где происходит их преобразование в формат базы данных 27. После этого по внутренней системной интерфейсной магистрали ИСППР 16 эти данные измерений (в формате базы данных 27) записываются в базу данных 27.
Задача качественной оценки параметров контроля решается следующим образом. Процессор 29 по внутренней системной интерфейсной магистрали ИСППР 16 осуществляет выборку знаний из модуля качественной оценки параметров контроля 98 и модуля экспертных знаний 99 базы знаний 26. Процессор 29, используя данные измерений и извлеченные знания, выполняет предписанную последовательность операций и после окончания процесса решения передает результаты вычислений по внутренней системной интерфейсной магистрали ИСППР 16 в интерфейс взаимодействия с пользователями и ЛПР 30 через локальные сети и Интернет.
Задача выбора оптимальной последовательности проведения процесса технического контроля и диагностирования при неполном обнаружении неисправности решается следующим образом. Процессор 29 по внутренней системной интерфейсной магистрали ИСППР 16 осуществляет выборку знаний из модуля поиска неисправностей 102 на основе математического аппарата БСД, модуля формирования оптимальной последовательности процедур диагностирования 101, модуля экспертных знаний 99 и модуля библиотеки прецедентов 100 посредством модуля экспертных знаний 99, который представляет собой совокупность формул, решающих правил и алгоритмов, предназначенных для работы модуля библиотеки прецедентов 100.
Процессор 29, используя данные измерений и извлеченные знания, выполняет предписанную последовательность операций и после окончания процесса решения передает результаты вычислений по внутренней системной интерфейсной магистрали ИСППР 25 в интерфейс взаимодействия с пользователями и ЛПР 30 через локальные сети и Интернет.
Таким образом, заявляемый комплекс имеет широкие функциональные возможности и повышенную достоверность результатов испытаний за счет охвата контролем радиотехнических систем, вычислительных систем и электрооборудования, увеличения числа контролируемых параметров и автоматизации процесса испытаний, а также высокое качество и обоснованность принимаемых решений за счет использования интеллектуальной системы поддержки принятия решений и ранее накопленной информации (знаний) высококвалифицированных специалистов в данной области при решении подобных задач.
Технический результат от использования заявляемого изобретения заключается в повышении точности и достоверности результатов комплексной проверки изделий, снижении трудоемкости, увеличении производительности и экономичности технического контроля и диагностирования путем организации интеллектуальной поддержки принятия решений.
Указанный технический результат при реализации заявляемого способа достигается совокупностью отличительных признаков, а именно дополнительным анализом и обработкой данных, полученных от центральной ЭВМ комплекса, при помощи интеллектуальной системы поддержки принятия решений (ИСППР), формированием базы знаний (БЗ) по модульному принципу, с возможностью ее постоянной адаптации, анализом и обработкой результатов контроля, а именно классификацией значений критичных параметров контроля, проведением упреждающего диагностирования, посредством модуля качественной оценки критичных параметров контроля (МКОКПК), формированием оптимальных последовательностей проведения диагностирования в виде первого ранжированного списка прецедентов посредством модуля библиотеки прецедентов (МБП), с использованием накопленного опыта решения подобных задач и модуля экспертных знаний (МЭЗ) в виде совокупности формул, решающих правил и алгоритмов, и второго ранжированного списка решений инцидента, посредством модуля поиска неисправностей (МЛН) на основе математического аппарата байесовской сети доверия (БСД), с учетом априорной информации экспертов, а также формированием окончательной оптимальной последовательности проведения диагностирования в виде третьего ранжированного списка прецедентов и решений инцидента, на основе обработки первого и второго списков, посредством модуля формирования оптимальной последовательности процедур диагностирования (МФОППД), и выдачей этого списка лицу, принимающему решения (ЛПР) для обеспечения локализации неисправности до конкретной составной части бортовых систем (БС) беспилотного летательного аппарата (БПЛА), накоплением и хранение полученной информации в базе данных (БД), выдачей (по запросу ЛПР) характеристик выбранных прецедентов, наиболее близких к текущему инциденту, и содержащих собранную ранее диагностическую информацию, хранящуюся в МБП, и выдачей пользователям окончательных результатов технического контроля параметров и диагностирования БС БПЛА и самоконтроля комплекса, прошедших обработку в ИСППР, в виде числовых значений и качественных оценок, характеризующих степень выраженности свойства «годен» для параметров, находящихся в области допустимых значений критичных параметров, а также введением в состав заявляемого комплекса для осуществления заявляемого способа интеллектуальной системы поддержки принятия решений (ИСППР), состоящей из базы знаний (БЗ) в виде модуля качественной оценки критичных параметров контроля, модуля экспертных знаний, модуля библиотеки прецедентов, модуля формирования оптимальной последовательности процедур диагностирования, модуля поиска неисправностей на основе математического аппарата байесовской сети доверия и интерфейса взаимодействия с пользователями и лицом, принимающим решения, а также базы данных (БД), процессора для координации и управления работой БЗ и БД, интерфейса взаимодействия с концентратором локальной вычислительной сети, внешней системной интерфейсной магистрали информационного обмена ИСППР и внутренней системной интерфейсной магистрали информационного обмена ИСППР.
Заявляемый комплекс контрольно-проверочной аппаратуры с интеллектуальной системой поддержки принятия решений может быть изготовлен в соответствии с приведенным описанием и чертежами на базе известных комплектующих изделий и технологического оборудования и использован для реализации заявляемого способа технического контроля и диагностирования бортовых систем (БС) беспилотного летательного аппарата (БПЛА) с поддержкой принятия решений.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОМПЛЕКС ДЛЯ ПРОВЕРКИ БОРТОВЫХ СИСТЕМ БЕСПИЛОТНОГО ЛЕТАТЕЛЬНОГО АППАРАТА | 2001 |
|
RU2205441C1 |
| Автоматизированная логистическая информационно-интеллектуальная система принятия решений в производственно-логистическом комплексе | 2020 |
|
RU2755520C1 |
| Система поддержки принятия решений с модульной структурой для операторов судов двойного действия | 2019 |
|
RU2713077C1 |
| СИСТЕМА ДЛЯ ПОДДЕРЖКИ ПРИНЯТИЯ ВРАЧЕБНЫХ РЕШЕНИЙ | 2020 |
|
RU2752792C1 |
| Способ интеллектуальной поддержки экипажа | 2020 |
|
RU2767406C1 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ ВРАЧЕБНЫХ РЕШЕНИЙ | 2023 |
|
RU2818874C1 |
| Система информационной поддержки принятия управленческих решений для обслуживающего персонала судовой энергетической установки | 2015 |
|
RU2668487C2 |
| СИСТЕМА ПОДДЕРЖКИ ПРИНЯТИЯ ВРАЧЕБНЫХ РЕШЕНИЙ | 2023 |
|
RU2830032C1 |
| ЭКСПЕРТНАЯ СИСТЕМА КОНТРОЛЯ РАБОТЫ БОРТОВОГО ОБОРУДОВАНИЯ ЛЕТАТЕЛЬНЫХ АППАРАТОВ | 2012 |
|
RU2517422C1 |
| Мультифункциональный измерительный аппаратно-программный комплекс для обработки радиолокационной и оптической информации | 2022 |
|
RU2805988C1 |
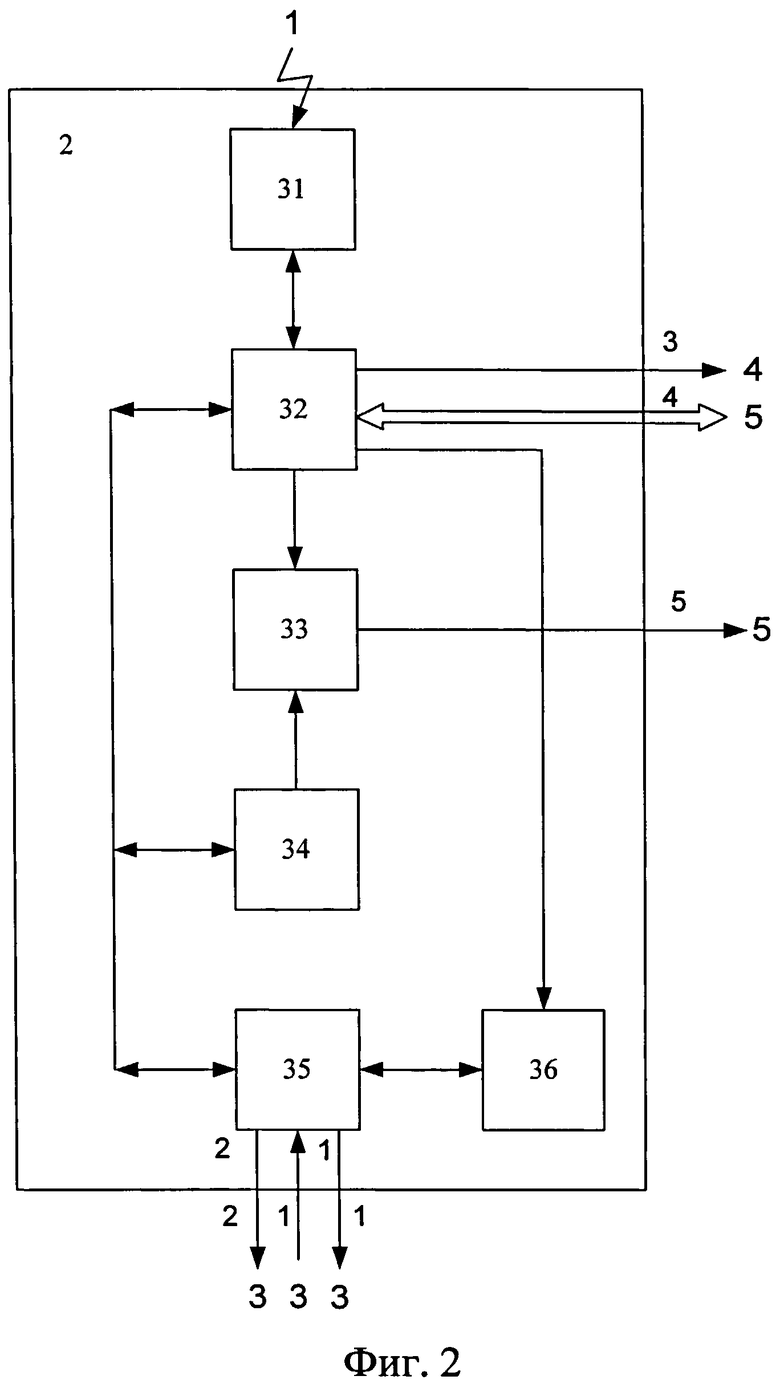

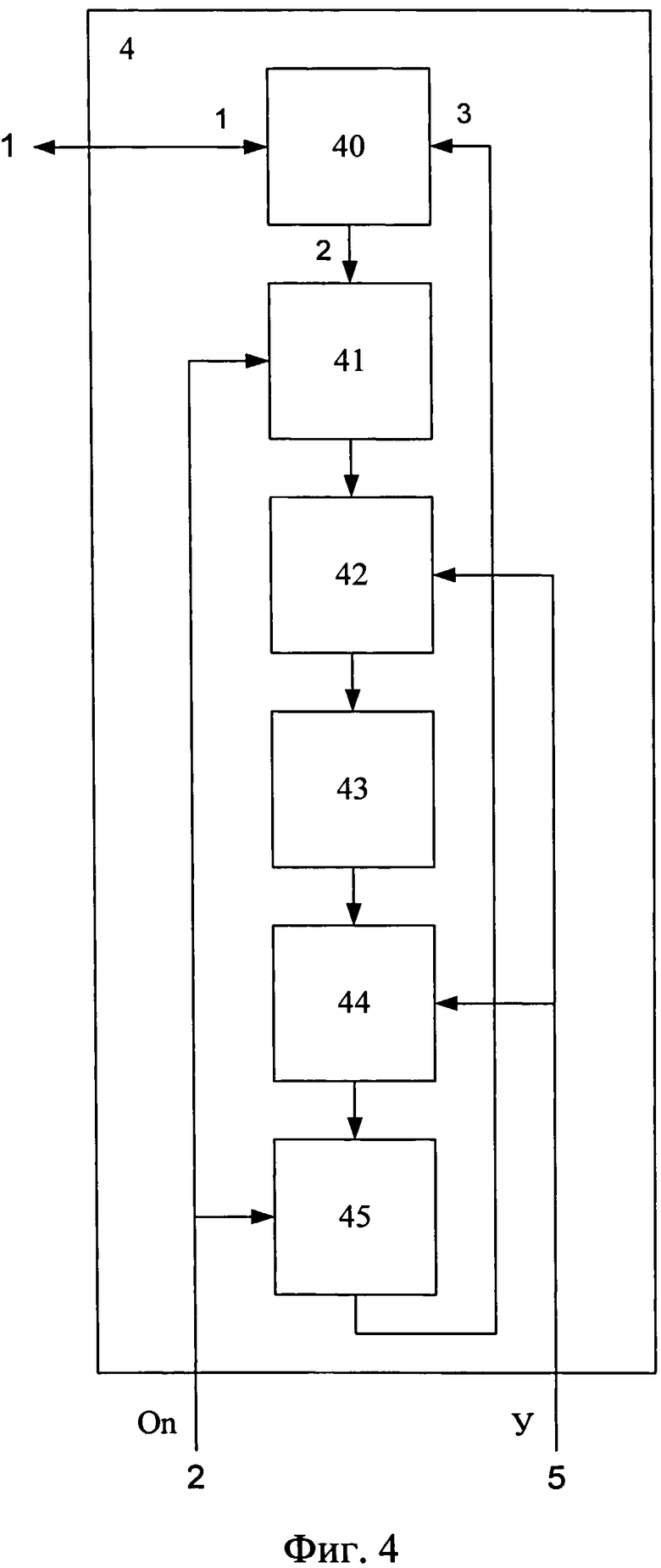


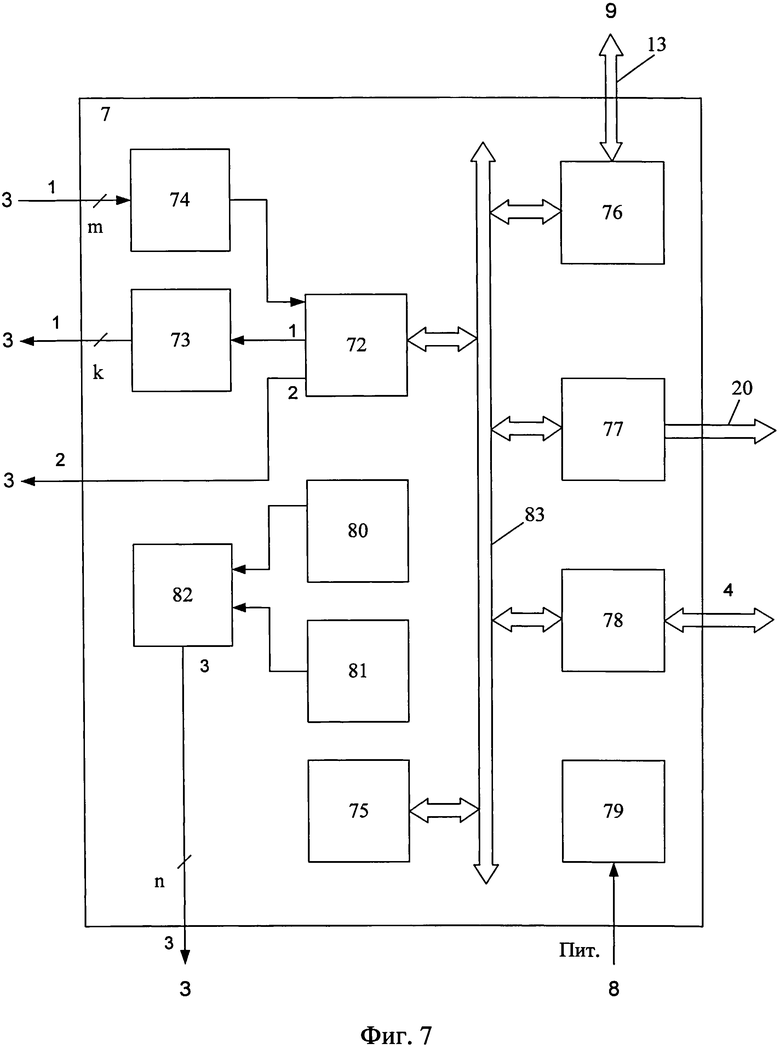

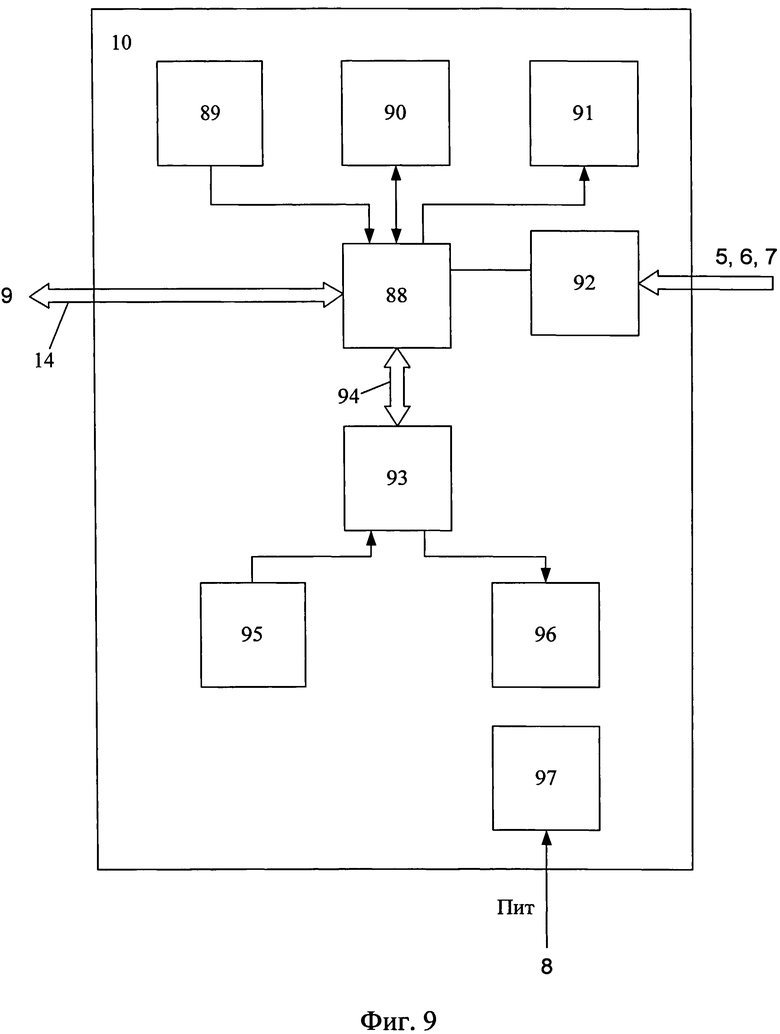
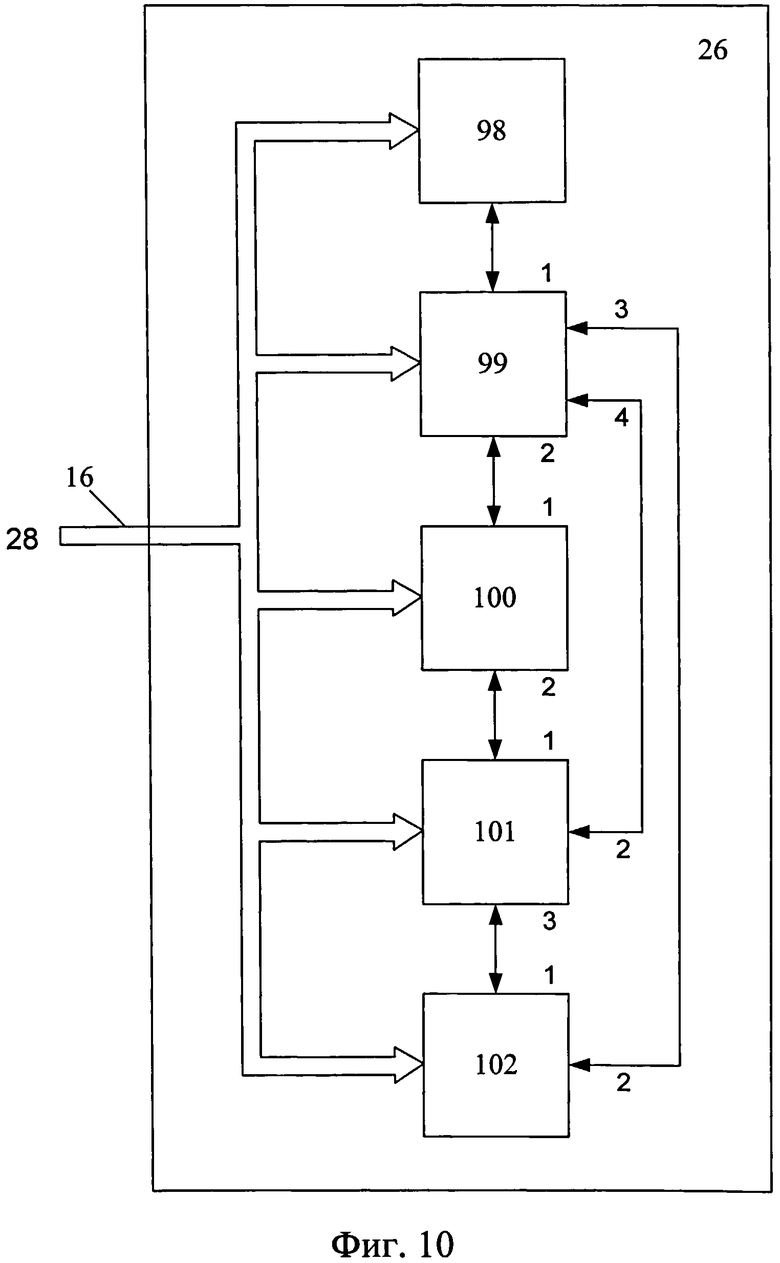
Изобретение относится к авиационной технике, в частности к способам технического контроля и диагностирования бортовых систем (БС) беспилотного летательного аппарата (БПЛА). Техническим результатом является повышение эффективности проверки БС БПЛА. В заявленном способе дополнительно производят анализ и обработку данных, полученных от центральной ЭВМ комплекса посредством интеллектуальной системы поддержки принятия решений, осуществляют классификацию значений критичных параметров контроля, характеризующих критичные составные части БС БПЛА по качественному признаку, с присвоением каждому параметру качественной оценки для выявления предотказных состояний БС БПЛА и проведения упреждающего диагностирования, при обнаружении неразличимых неисправностей формируют оптимальные последовательности проведения диагностирования в виде первого ранжированного списка прецедентов и второго ранжированного списка решений инцидента, а также формируют окончательную оптимальную последовательность проведения диагностирования в виде третьего ранжированного списка прецедентов и решений инцидента, на основе обработки первого и второго списков. 2 н.п. ф-лы, 10 ил.
1. Способ технического контроля и диагностирования бортовых систем (БС) беспилотного летательного аппарата (БПЛА) с поддержкой принятия решений, заключающийся в том, что посредством комплекса контрольно-проверочной аппаратуры (КПА) производят исходное тестирование центральной электронно-вычислительной машины (ЭВМ) и ЭВМ контрольных устройств, загрузку базового и технологического программного обеспечения из внешнего накопителя, штатный контроль БС БПЛА и самоконтроль комплекса, включающие проверку электротехнических систем, проверку релейных устройств коммутации, наличие соединений между контрольными точками электрооборудования, проверку системы управления БПЛА, проверку бортовых вычислительных устройств, проверку радиотехнических устройств, анализ сигналов, относящихся к телеметрии, проверку прохождения команд, формируемых устройством контроля системы управления, проверку аппаратуры взаимодействия с вычислительными устройствами системы управления БПЛА, координацию работы всего оборудования упомянутого комплекса, управление процессом контроля и диагностирования, визуальное отображение его промежуточных и окончательных результатов, а также документирование и выдачу этих результатов пользователям, отличающийся тем, что перед выдачей результатов контроля параметров и диагностирования БС БПЛА и самоконтроля комплекса пользователям дополнительно производят анализ и обработку данных, полученных от центральной ЭВМ комплекса через концентратор локальной вычислительной сети (ЛВС) и интерфейс взаимодействия с концентратором ЛВС, посредством интеллектуальной системы поддержки принятия решений (ИСППР), для чего формируют базу знаний (БЗ) по модульному принципу, с возможностью ее постоянной адаптации, производят анализ и обработку результатов контроля, а именно осуществляют классификацию значений критичных параметров контроля, характеризующих критичные составные части БС БПЛА по качественному признаку, с присвоением каждому параметру качественной оценки для выявления предотказных состояний БС БПЛА и проведения упреждающего диагностирования, посредством модуля качественной оценки критичных параметров контроля (МКОКПК), при обнаружении неразличимых неисправностей формируют оптимальные последовательности проведения диагностирования в виде первого ранжированного списка прецедентов посредством модуля библиотеки прецедентов (МБП), с использованием накопленного опыта решения подобных задач и модуля экспертных знаний (МЭЗ) в виде совокупности формул, решающих правил и алгоритмов, и второго ранжированного списка решений инцидента, посредством модуля поиска неисправностей (МПН) на основе математического аппарата байесовской сети доверия (БСД), с учетом априорной информации экспертов, а также формируют окончательную оптимальную последовательность проведения диагностирования в виде третьего ранжированного списка прецедентов и решений инцидента, на основе обработки первого и второго списков, посредством модуля формирования оптимальной последовательности процедур диагностирования (МФОППД), и выдают этот список лицу, принимающему решения (ЛПР) через интерфейс взаимодействия с пользователями и ЛПР для обеспечения локализации неисправности до конкретной составной части БС БПЛА, причем накопление и хранение полученной информации производят в базе данных (БД), кроме того, по запросу ЛПР, выдают характеристики выбранных им прецедентов, наиболее близких к текущему инциденту и содержащих собранную ранее диагностическую информацию, хранящуюся в МБП, затем через упомянутый интерфейс взаимодействия с пользователями и ЛПР производят выдачу пользователям окончательных результатов технического контроля параметров и диагностирования БС БПЛА и самоконтроля комплекса, прошедших обработку в ИСППР, в виде числовых значений и качественных оценок, характеризующих степень выраженности свойства «годен» для параметров, находящихся в области допустимых значений критичных параметров, при этом координацию и управление работой БЗ и БД осуществляют процессором, а электропитание составных частей комплекса - устройством гарантированного электропитания (УГЭП).
2. Комплекс КПА БС БПЛА с ИСППР для осуществления способа по п.1, содержащий имитатор цели с контрольной антенной, связанной посредством радиоканала с антенной радиолокационного визира БПЛА, выход сигналов опорной частоты которого соединен с опорным входом имитатора цели, устройство коммутации, соединенное с бортовым разъемом БПЛА посредством кабеля цепей соединения с контрольными точками электрооборудования, кабеля цепей передачи команд и кабеля сигнальных цепей, пульт управления и объединенные с ним в ЛВС посредством интерфейсных магистралей ЛВС, соединенных в концентраторе ЛВС по схеме «звезда», устройство контроля системы управления, устройство контроля электрооборудования и устройство самоконтроля, каждое из которых содержит устройство гальванической развязки, релейный передатчик команд и контрольный процессор, выполненный на основе ЭВМ, к системной шине которой подключен контроллер ЛВС, соединенный с соответствующей магистралью ЛВС, устройство дискретного ввода-вывода и устройство мониторинга, соединенные посредством соответствующей интерфейсной магистрали последовательного канала с входом-выходом интерфейса последовательного канала с пультом управления, кроме этого устройство контроля системы управления содержит мультиплексор, входы которого образуют входы измеряемых сигналов устройства контроля системы управления, а к системным шинам ЭВМ контрольного процессора устройства контроля системы управления и контрольного процессора устройства самоконтроля подключены адаптеры мультиплексного канала, при этом в штатном режиме работы комплекса через адаптер мультиплексного канала контрольного процессора устройства контроля системы управления осуществляется информационный обмен с бортовой ЭВМ системы управления БПЛА, а в режиме самоконтроля через адаптеры мультиплексных каналов осуществляется информационный обмен между контрольными процессорами устройства контроля системы управления и устройства самоконтроля, кроме этого входы релейных передатчиков команд и выходы устройств гальванической развязки устройства контроля системы управления, устройства контроля электрооборудования и устройства самоконтроля соединены соответственно с выходами сигналов управления релейными передатчиками и входами чтения релейных сигналов устройства дискретного ввода-вывода соответствующего контрольного процессора, а выходы релейных передатчиков команд, образующие выходы команд, и входы устройств гальванической развязки, образующие входы релейных сигналов устройства контроля системы управления, устройства контроля электрооборудования и устройства самоконтроля, соединены с соответствующими входами и выходами устройства коммутации, отличающийся тем, что в состав введена упомянутая ИСППР, состоящая из БЗ в виде модулей МКОКПК, МЭЗ, МБП, МФОППД и МПН на основе математического аппарата БСД, а также интерфейса взаимодействия с пользователями и ЛПР, БД, процессора для координации и управления работой БЗ и БД и интерфейса взаимодействия с концентратором ЛВС, вход которого соединен с концентратором ЛВС посредством внешней системной интерфейсной магистрали информационного обмена ИСППР, а выход через внутреннюю системную интерфейсную магистраль информационного обмена ИСППР - с входами-выходами упомянутых БЗ, БД, интерфейса взаимодействия с пользователями и ЛПР и процессора, при этом вход-выход МКОКПК соединен с первым входом-выходом МЭЗ, второй вход-выход МЭЗ соединен с первым входом-выходом МБП, второй вход-выход которого соединен с первым входом МФОППД, третий вход-выход МЭЗ соединен со вторым входом-выходом МПН на основе математического аппарата БСД, первый вход-выход которого соединен с третьим входом-выходом МФОППД, а четвертый вход-выход МЭЗ соединен со вторым входом-выходом упомянутого МФОППД, кроме того, комплекс снабжен УГЭП для электропитания его составных частей.
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |

