УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
Настоящее изобретение относится к факоэмульсификационной хирургии, а именно устройству, способному лучше регулировать давление, ощутимое в глазу в процессе хирургического вмешательства по удалению катаракты.
Человеческий глаз функционирует для обеспечения зрения путем передачи света через прозрачный наружный участок, называемый роговицей, и далее фокусировки изображения с помощью хрусталика на сетчатке. Качество сфокусированного изображения зависит от множества факторов, в том числе от размера и формы глаза, а также прозрачности роговицы и хрусталика. Когда возраст или заболевание приводят к снижению прозрачности хрусталика, зрение ухудшается вследствие уменьшения света, передаваемого на сетчатку. Этот дефект хрусталика глаза в медицине известен как катаракта. Принятое лечение данного заболевания заключается в хирургическом удалении хрусталика и его замене на искусственную интраокулярную линзу (ИОЛ), выполняющую функции хрусталика.
В США большинство пораженных катарактой хрусталиков удаляется с помощью хирургической технологии под названием факоэмульсификация. Типичный хирургический ручной блок, пригодный для факоэмульсификации, состоит из ручного блока для факоэмульсификации с ультразвуковым приводом, присоединенной полой режущей иглы, окруженной ирригационной втулкой, а также электронной консоли управления. Узел ручного блока присоединяется к консоли управления с помощью электрического кабеля и гибкой трубки. Посредством электрического кабеля консоль изменяет величину мощности, передаваемой ручным блоком на присоединенную режущую иглу. Гибкая трубка подает ирригационную текучую среду на участок хирургического вмешательства и отводит аспирационную текучую среду из глаза через узел ручного блока.
Рабочая часть типичного ручного блока представляет собой центрально расположенный полый резонирующий стержень, или рупор, непосредственно соединенный с набором пьезоэлектрических кристаллов. Кристаллы создают требуемые ультразвуковые колебания для приведения в действие как рупора, так и присоединенной режущей иглы в процессе факоэмульсификации и управляются консолью. Узел кристалл/рупор подвешен в полом корпусе или оболочке ручного блока с помощью гибких опор. Корпус ручного блока оканчивается на участке уменьшенного диаметра или носовом конусе на дистальном конце корпуса. Обычно на носовом конусе имеется наружная резьба для приема полой ирригационной втулки, охватывающей режущую иглу по большей части ее длины. Аналогичным образом отверстие рупора имеет внутреннюю резьбу на своем дистальном конце для приема наружной резьбы режущего наконечника. Ирригационная втулка также имеет отверстие с внутренней резьбой, которая завинчена по наружной резьбе носового конуса. Режущая игла отрегулирована так, что ее кончик выступает лишь на определенную величину за открытый конец ирригационной втулки.
В ходе проведения факоэмульсификации кончик режущей иглы и конец ирригационной втулки вводятся в передний сегмент глаза через малый разрез в наружной ткани глаза. Хирург приводит кончик режущей иглы в соприкосновение с хрусталиком глаза, так что вибрирующий кончик фрагментирует хрусталик. Полученные фрагменты аспирируются из глаза через внутреннее отверстие режущей иглы вместе с ирригационным раствором, подаваемым в глаз в ходе процедуры, и поступают в резервуар для отходов.
На протяжении всей процедуры ирригационная текучая среда закачивается в глаз, проходя между ирригационной втулкой и режущей иглой и выходя в глаз на кончике ирригационной втулки и/или из одного или более портов либо отверстий, прорезанных в ирригационной втулке возле ее конца. Ирригационная текучая среда существенно важна, поскольку она предотвращает коллапс глазного яблока в процессе удаления эмульсифицированного хрусталика. Ирригационная текучая среда также предохраняет ткани глаза от тепла, генерируемого вследствие вибраций ультразвуковой режущей иглы. Кроме того, ирригационная текучая среда удерживает фрагменты эмульсифицированного хрусталика в подвешенном состоянии для аспирации из глаза.
Обычное явление в процессе проведения факоэмульсификации - изменение скоростей потоков, возникающее в ходе хирургической операции. Изменение скоростей потоков приводит к изменению падения давления в пути протекания ирригационной текучей среды от источника ирригационной текучей среды до глаза, что приводит к изменению давления в передней камере глаза (также известное как интраокулярное давление, или IOP). Более высокие скорости потока приводят к большему падению давления и к более низкому IOP. При снижении IOP операционное пространство в глазу уменьшается.
Другое обычное осложнение при проведении факоэмульсификации возникает в результате блокирования, или окклюзии, аспирационной иглы. По мере того как ирригационная текучая среда и эмульсифицированная ткань выводятся путем аспирации из внутреннего пространства глаза через полую режущую иглу, кусочки ткани, превышающие размер диаметра отверстия иглы, могут застревать в кончике иглы. Когда кончик засорен, в кончике создается давление разрежения. Получаемое в результате падение давления в передней камере глаза после устранения засора известно как постокклюзионный скачок. Данный постокклюзионный скачок в некоторых случаях может привести к тому, что относительно большое количество текучей среды и ткани аспирируется из глаза слишком быстро, что может вызвать коллапс глазного яблока и/или разрыв капсулы хрусталика.
Для снижения скачка были разработаны различные технологии, такие как продувка аспирационной линии. Однако остается потребность в усовершенствовании устройств для факоэмульсификации, которые позволят уменьшить постокклюзионный скачок, а также поддерживать стабильное интраокулярное давление в процессе изменения условий течения.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
В одном варианте осуществления в соответствии с принципами настоящего изобретения настоящее изобретение представляет собой офтальмологический хирургический ручной блок, содержащий привод, соединенный с рупором, рупор, соединенный с иглой, аспирационный насос, составляющий одно целое с ручным блоком, при этом аспирационный насос расположен рядом с иглой; а также жесткий участок аспирационной линии, расположенный между аспирационным насосом и иглой.
В другом варианте осуществления в соответствии с принципами настоящего изобретения настоящее изобретение представляет собой офтальмологический хирургический ручной блок, содержащий привод, соединенный с рупором, рупор, соединенный с иглой, аспирационный насос, составляющий одно целое с ручным блоком, при этом аспирационный насос расположен рядом с иглой; сегмент одноразового использования, соединенный с аспирационным насосом; а также жесткий участок аспирационной линии, расположенный между аспирационным насосом и иглой.
Следует понимать, что предшествующее общее описание и последующее подробное описание представлены лишь в качестве примера и для пояснения, при этом ставится цель предоставить дополнительные пояснения настоящего изобретения. Последующее описание, так же как и практическое применение изобретения, отразят дополнительные преимущества и цели изобретения.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На прилагаемых чертежах, которые включены в состав настоящего описания и составляют его часть, проиллюстрированы различные варианты осуществления изобретения, которые совместно с описанием служат для пояснения принципов изобретения.
На Фигуре 1 показана схема компонентов в пути протекания текучей среды факоэмульсификационной системы, включающей ручной блок со встроенным аспирационным насосом согласно принципам настоящего изобретения.
На Фигуре 2 показана блок-схема ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения.
На Фигуре 3 показана блок-схема ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения.
На Фигуре 4 показан вид сбоку участка ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения.
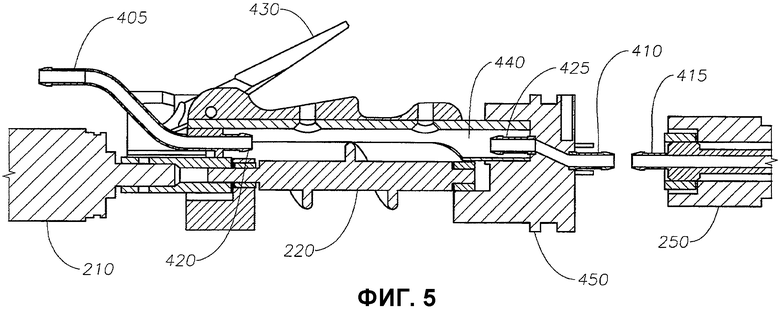
На Фигуре 5 показано сечение участка ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения.
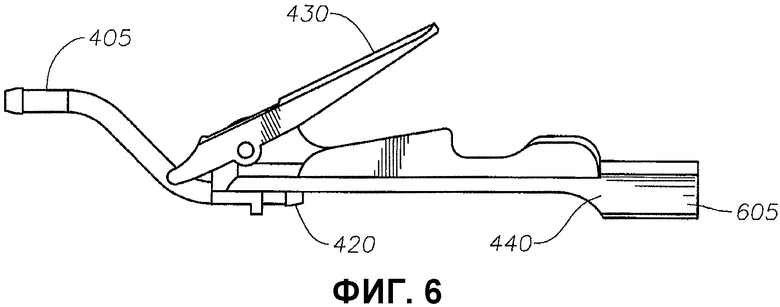
На Фигуре 6 показан вид сбоку съемного картриджа для использования с ручным блоком для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения.
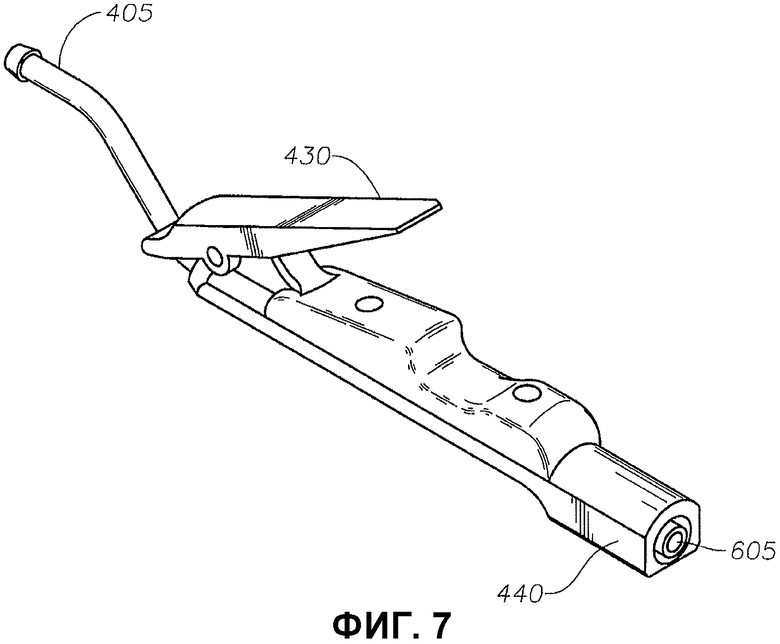
На Фигурах 7 показан вид в перспективе съемного картриджа для использования с ручным блоком для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНЫХ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
Далее будут даны подробные ссылки на типовые варианты осуществления изобретения, примеры которых представлены на прилагаемых чертежах. Там, где это возможно, одинаковые или схожие части имеют одинаковые ссылочные позиции на всех чертежах.
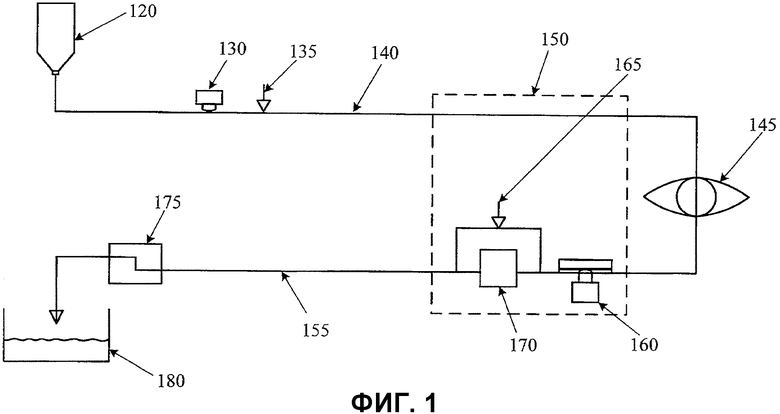
На Фигуре 1 показана схема компонентов в пути протекания для текучей среды факоэмульсификационной системы, включающей ручной блок со встроенным аспирационным насосом согласно принципам настоящего изобретения. На Фигуре 1 представлен путь протекания текучей среды через глаз 145 в процессе хирургического вмешательства по удалению катаракты. Компоненты включают ирригационный источник 120, в качестве опции ирригационный датчик 130 давления, в качестве опции ирригационный клапан 135, ирригационную линию 140, ручной блок 150, аспирационную линию 155, в качестве опции аспирационный датчик 160 давления, в качестве опции выпускной клапан 165, насос 170, резервуар 175, а также дренажный мешок 180. Ирригационная линия 140 обеспечивает поступление ирригационной текучей среды в глаз 145 в процессе операции по удалению катаракты. По аспирационной линии 155 удаляются текучая среда и эмульсифицированные частицы хрусталика из глаза в процессе операции по удалению катаракты.
Когда ирригационная текучая среда выходит из ирригационного источника 120, она перемещается через ирригационную линию 140 в глаз 145. Ирригационный датчик 130 давления замеряет давление ирригационной текучей среды в ирригационной линии 140. Предусмотрен также в качестве опции ирригационный клапан 135 для управления ирригацией по типу включено-выключено. Ирригационный датчик 130 давления выполнен посредством любого числа коммерчески доступных датчиков давления текучей среды.
В ходе операции факоэмульсификации ручной блок 150 располагается относительно глаза 145. Ручной блок 150 имеет полую иглу (270 на Фигурах 2 и 3), совершающую ультразвуковые вибрации в глазу для разрушения пораженного хрусталика. Втулка, расположенная вокруг иглы, обеспечивает поступление ирригационной текучей среды из ирригационной линии 140. Ирригационная текучая среда проходит через пространство между наружной стороной иглы и внутренней стороной втулки. Текучая среда и частицы хрусталика аспирируются через полую иглу. Таким образом, внутренний проход в полой игле соединен по текучей среде с аспирационной линией 155. Насос 170 выводит аспирированную текучую среду из глаза 145. В качестве опции аспирационный датчик 160 давления замеряет давление в аспирационной линии. В качестве опции выпускной клапан может использоваться для снятия разрежения, создаваемого насосом 170. Аспирированная текучая среда проходит через резервуар 175 и далее в дренажный мешок 180.
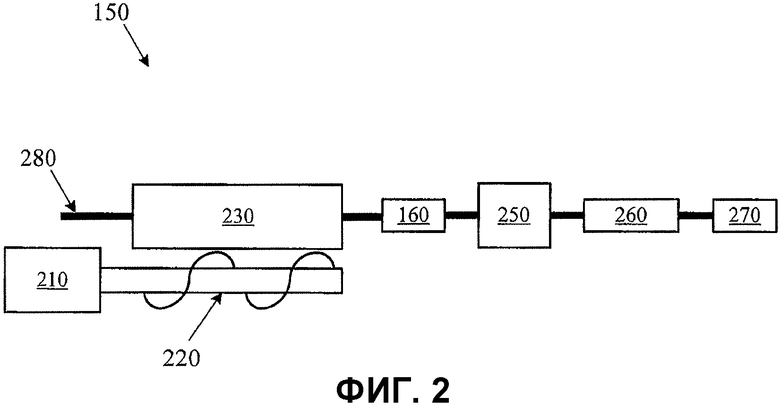
На Фигуре 2 показана блок-схема ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения. На Фигуре 2 ручной блок 150 содержит двигатель 210, вал 220, съемный картридж 230, в качестве опции аспирационный датчик 160 давления, привод 250, рупор 260, иглу 270, а также аспирационную линию 280. Двигатель 210 вращает вал 220. Когда насос приведен в работу, съемный картридж 230 зафиксирован вплотную к валу 220. Аспирационный датчик 160 давления расположен между съемным картриджем 230 и глазом 145.
На Фигуре 2 насос 170 содержит двигатель 210, вал 220, а также гибкую трубку в съемном картридже 230. В одном варианте осуществления настоящего изобретения вал 220 имеет спиральную конструкцию, которая поджимается к гибкой трубке в съемном картридже 230. Таким образом, реализуется аспирационный насос винтового типа или спирального типа, который имеет двигатель 210, вал 220 и гибкую трубку в съемном картридже 230. Это более ясно показано и описано на Фигурах 4 и 5. Хотя насос 170 представлен в виде насоса винтового типа, могут также использоваться и другие насосы.
Аспирационная линия 280 соединена по текучей среде со съемным картриджем 230. Аспирационная линия также продолжается через привод 250, рупор 260 и иглу 270 или в обход них. Полость в игле 270 соединена по текучей среде с аспирационной линией 280. Как описано выше, текучая среда и частицы хрусталика аспирируются через полость иглы 270. Аспирационный насос 170 выводит текучую среду и частицы хрусталика через полость иглы 270.
Привод 250 обычно представляет собой ультразвуковой привод, создающий ультразвуковые колебания в рупоре 260. Рупор 260 обычно представляет собой металлическую массу, соединенную с приводом 250 и иглой 270. Таким образом, колебания, создаваемые приводом 250, передаются на рупор 260 и на иглу 270. Иглу 270 помещают в глаз и приводят в колебание для фрагментации хрусталика, пораженного катарактой.
Аспирационный датчик 160 давления замеряет давление аспирации в аспирационной линии 280. Хотя показано, что аспирационный датчик давления расположен между съемным картриджем 230 и приводом 250, он может быть расположен в любом месте между насосом 170 и глазом 145. Аспирационный датчик 160 давления может быть реализован с помощью любого количества известных устройств датчика давления.
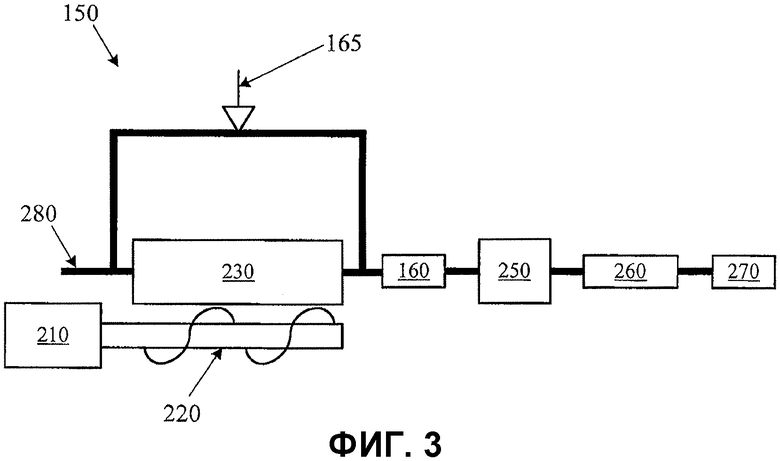
На Фигуре 3 показана блок-схема ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения. В примере на Фигуре 3 имеются элементы, показанные на Фигуре 2, а также в качестве опции выпускной клапан 165. При наличии в качестве опции выпускного клапана 165 он обеспечивает создание выпускного пути для аспирационного насоса 170. Таким образом, насос 170 может, например, сообщаться с атмосферой, когда выпускной клапан 165 открыт. Как показано на Фигуре 3, аспирационная линия 280 имеет два пути - один путь проходит через съемный картридж 230, а другой путь проходит в обход съемного картриджа 230. Этот второй путь (проходящий в обход съемного картриджа 230), а также соответствующий выпускной клапан 165 также могут быть включены в состав съемного картриджа 230. Когда выпускной клапан 165 открыт, аспирация или разрежение, создаваемые насосом 170, снижаются в результате его сообщения с атмосферой.
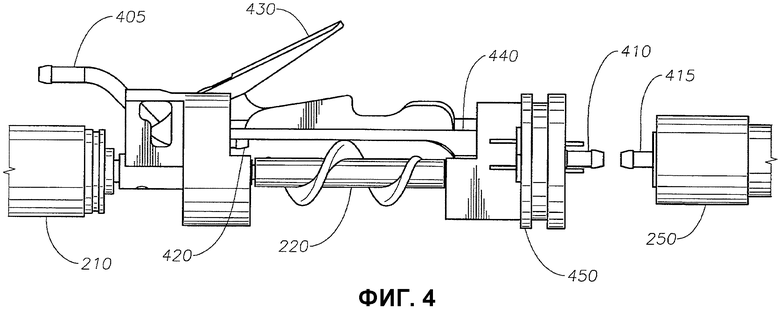
На Фигурах 4 и 5 соответственно показаны виды сбоку и в разрезе участка ручного блока для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения. На Фигурах 4 и 5 более ясно показаны детали одного примера съемного картриджа 230 и насоса 170. В представленном примере съемный картридж 230 содержит соединение 405 аспирационной линии, первое трубчатое соединение 420, держатель 440 трубки, а также рычаг 430. Как показано, эти компоненты встроены в несущую конструкцию. Съемный картридж 230 может извлекаться из остальной части ручного блока.
В примере съемного картриджа, представленного на Фигурах 4 и 5, соединение 405 аспирационной линии может быть прикреплено к аспирационной трубке, которая соединена с хирургической консолью. Таким образом, соединение 405 аспирационной линии находится около конца ручного блока, соединенного с хирургической консолью. Трубка продолжается от соединения 405 аспирационной линии к первому трубчатому соединению 420. Трубка является частью аспирационной линии 280, показанной на Фигурах 2 и 3.
Держатель 440 трубки удерживает гибкую трубку (не показана), расположенную между валом 220 и держателем 440 трубки. Вал 220 поджимает гибкую трубку к держателю 440 трубки. По мере вращения вала 220 спиральный выступ на валу 220 прокачивает текучую среду через гибкую трубку (реализуя, таким образом, принцип действия насоса винтового типа или спирального типа). Держатель 440 трубки выполнен из жесткого материала, пригодного для удерживания гибкой трубки. Один конец гибкой трубки соединен по текучей среде с первым трубчатым соединением 420, а другой конец гибкой трубки соединен по текучей среде со вторым трубчатым соединением 425. Таким образом, гибкая трубка является частью аспирационной линии 280.
Рычаг 430 служит для прикрепления съемного картриджа 230 к остальной части ручного блока. Хотя здесь показан рычаг, могут также применяться и другие механизмы для прикрепления съемного картриджа 230 к остальной части ручного блока.
Двигатель 210 соединен с валом 220 и служит для вращения вала 220. Двигателем 210 можно управлять для регулирования движения вала 220, как подробнее описано ниже. Двигатель 210 является обычно электродвигателем постоянного тока, но может также представлять собой любой вид двигателя или привода, пригодного для вращения вала 220.
В примере на Фигурах 4 и 5 соединительная муфта 450 присоединяет гибкую трубку, удерживаемую держателем 440 трубки, к соединителю 415 ручного блока. Соединитель 410 соединительной муфты сопрягается с соединителем 415 ручного блока либо непосредственно, либо посредством другой части. Таким образом, аспирационный путь проходит через соединитель 415 ручного блока, соединитель 410 соединительной муфты, соединительную муфту 450, второе трубчатое соединение 425, гибкую трубку, удерживаемую держателем 440 трубки, первое трубчатое соединение 420, а также соединение 405 аспирационной линии. Соединительная муфта 450 присоединена к концу вала 220. Таким образом, соединительная муфта 450, вал 220 и двигатель 210 (совместно с несущей конструкцией, удерживающей эти части) присоединены к приводу 250 (который соединен с рупором 260 и иглой 270).
Участок аспирационной линии между насосом и глазом (т.е. между вторым трубчатым соединением 425 и иглой 270) минимален (порядка нескольких дюймов). Кроме того, этот участок аспирационной линии между насосом и глазом может не поддаваться деформированию (т.е. он может быть жестким). При малой длине недеформируемой трубки между насосом 170 и глазом устраняется скачок, имеющий место в системах предшествующего уровня техники.
В процессе работы двигатель 210 вращает вал 220. Устройство управления (не показано) контролирует работу двигателя 210. Таким образом, вал 220 может совершать вращение с любой требуемой скоростью для создания любого требуемого разрежения. Кроме того, вал 220 может быть остановлен или приведен во вращение в противоположном направлении, если это требуется. Таким образом, двигателем 210 можно управлять, чтобы вращать вал 220 в обоих направлениях. В процессе вращения вал 220 подает текучую среду через гибкую трубку и прокачивает текучую среду через аспирационную линию.
В другом примере вал 220 может быть перемещен по направлению к держателю 440 трубки или от него. Таким образом, пространство между держателем 440 трубки и валом 220 может изменяться, так что гибкая трубка может пережиматься в различной степени между валом 220 и держателем 440 трубки. Другими словами, вал 220 может пережимать гибкую трубку, удерживаемую держателем 440 трубки, очень плотно, чтобы создать перекачивание, не допускающее перетекания. По альтернативному варианту, по мере перемещения вала 220 от держателя 440 трубки, гибкая трубка пережимается менее плотно, что обеспечивает перетекание и приводит к меньшему разрежению и нагнетательному усилию. Положение вала 220 относительно держателя 440 трубки может быть выполнено с возможностью регулировки через гибкую трубку и, в свою очередь, регулирования разрежения, создаваемого насосом.
В другом примере (показанном на Фигуре 3), положение вала 220 относительно держателя 440 трубки может быть фиксированным, при этом выпускной клапан 165 может быть использован для создания перетекания, регулирующего разрежение, создаваемого насосом. Таким образом, выпускной клапан 165 может быть выполнен с возможностью регулирования глубины разрежения, присутствующего в аспирационной линии (путем регулирования степени перетекания посредством выпускного клапана 165).
Регулирование аспирационного разрежения может основываться на показаниях аспирационного датчика 160 давления. Аспирационный датчик 160 давления расположен между насосом и глазом. Таким образом, аспирационный датчик 160 давления точно считывает режим давления в аспирационной линии в непосредственной близости к глазу. Такие показания могут использоваться для точного регулирования аспирационного разрежения, прикладываемого к глазу.
На Фигурах 6 и 7 показаны соответственно виды сбоку и в перспективе съемного картриджа для использования с ручным блоком для факоэмульсификации со встроенным аспирационным насосом согласно принципам настоящего изобретения. В примере, представленном на Фигурах 6 и 7, съемный картридж содержит соединение 405 аспирационной линии, первое трубчатое соединение 420, держатель 440 трубки, рычаг 430, а также отверстие 605. Отверстие 605 служит средством связи со вторым трубчатым соединением 425, показанным на Фигуре 5. Между первым трубчатым соединением 420 и отверстием 605 расположен участок гибкой трубки. Съемный картридж 230 на Фигурах 6 и 7 может использоваться многократно или быть одноразовым. В одном примере съемный картридж используется многократно, а гибкая трубка является одноразовой. В другом примере съемный картридж является одноразовым наряду с гибкой трубкой.
Конструкция по настоящему изобретению позволяет расположить аспирационный насос 170 весьма близко к глазу 145. Расстояние между аспирационным насосом 170 и глазом 145 может быть очень малым - порядка нескольких дюймов. Расположение аспирационного насоса 170 вблизи глаза 145 создает аспирационную линию между аспирационным насосом 170 и глазом 145 весьма малой длины. Кроме того, участок аспирационной линии, расположенный между аспирационным насосом 170 и глазом 145, может быть жестким (например, он может быть выполнен из нержавеющей стали). Этот короткий участок не поддающегося деформированию материала, составляющий аспирационную линию между аспирационным насосом 170 и глазом 145, исключает проявления какого-либо эффекта скачка, связанного с традиционными факоэмульсификационными системами.
В традиционных факоэмульсификационных системах аспирационный насос расположен на консоли. Между аспирационным насосом и глазом располагается относительно длинный участок гибкой трубки (шесть футов или более). Этот относительно длинный участок гибкой трубки обладает значительной податливостью - он может растягиваться в ответ на изменение давления разрежения. Такая податливость приводит к появлению скачков, как говорилось ранее. Путем включения аспирационного насоса в состав ручного блока (и расположения его весьма близко к глазу), а также создания между аспирационным насосом и глазом очень короткого участка трубки, не поддающегося деформированию, такие скачки можно исключить, что обеспечивает более безопасное и более эффективное проведение хирургического вмешательства.
Из вышесказанного следует, что настоящее изобретение позволяет создать работающую под давлением инфузионную систему для проведения факоэмульсификации. В настоящем изобретении предложено ирригационное устройство поджимного типа, более точно регулирующее давление текучей среды. Настоящее изобретение представлено с помощью примера, при этом средний специалист в данной области техники сможет предложить различные модификации.
Другие варианты осуществления изобретения станут очевидны специалистам в данной области техники после рассмотрения настоящего описания и практического использования раскрытого в нем изобретения. Предполагается, что описание и примеры следует рассматривать лишь в качестве типовых, при этом истинный объем и сущность изобретения определяются последующей формулой изобретения.
Изобретение относится к медицине. Офтальмологический хирургический ручной блок содержит привод, соединенный с рупором. Рупор соединен с иглой. Аспирационный насос составляет одно целое с ручным блоком и расположен рядом с иглой. Жесткий участок аспирационной линии расположен между аспирационным насосом и иглой. В качестве датчик давления расположен между аспирационным насосом и иглой. 2 н. и 7 з.п. ф-лы. 7 ил.
1. Офтальмологический хирургический ручной блок, содержащий:
привод, соединенный с рупором, при этом рупор соединен с иглой;
аспирационный насос, составляющий одно целое с ручным блоком, при этом аспирационный насос расположен рядом с иглой; причем аспирационный насос содержит:
двигатель;
вал, оперативно соединенный с двигателем, при этом вал имеет спиральную конструкцию; и
гибкую трубку, причем спиральная конструкция выполнена с возможностью поджимать гибкую трубку.
2. Ручной блок по п. 1, дополнительно содержащий:
аспирационный датчик давления, расположенный между аспирационным насосом и иглой.
3. Ручной блок по п. 1, дополнительно содержащий:
выпускной клапан, расположенный параллельно с аспирационным насосом, при этом выпускной клапан выполнен с возможностью регулировки разрежения, создаваемого аспирационным насосом.
4. Ручной блок по п. 1, дополнительно содержащий:
жесткий участок аспирационной линии, расположенный между аспирационным насосом и иглой,
при этом положение спиральной конструкции относительно гибкой трубки определяет перетекание, которое снижает давление разрежения в жестком участке аспирационной линии.
5. Офтальмологический хирургический ручной блок, содержащий:
привод, соединенный с рупором, при этом рупор соединен с иглой;
аспирационный насос, составляющий одно целое с ручным блоком, при этом аспирационный насос расположен рядом с иглой; причем аспирационный насос содержит:
двигатель;
вал, оперативно соединенный с двигателем, при этом вал имеет спиральную конструкцию; и картридж, соединенный с аспирационным насосом и содержащий держатель трубки и гибкую трубку, причем гибкая трубка расположена между валом и держателем трубки, причем
спиральная конструкция выполнена с возможностью поджимать гибкую трубку к держателю трубки.
6. Ручной блок по п. 5, дополнительно содержащий:
аспирационный датчик давления, расположенный между аспирационным насосом и иглой.
7. Ручной блок по п. 5, дополнительно содержащий:
выпускной клапан, расположенный параллельно с аспирационным насосом, при этом выпускной клапан выполнен с возможностью регулировки разрежения, создаваемого аспирационным насосом.
8. Ручной блок по п. 5, дополнительно содержащий:
жесткий участок аспирационной линии, расположенный между аспирационным насосом и иглой,
при этом положение спиральной конструкции относительно гибкой трубки определяет перетекание, которое снижает давление разрежения в жестком участке аспирационной линии.
9. Ручной блок по п. 5, в котором картридж включает в себя сегмент одноразового использования.
| US 3589363 A, 29.06.1971 | |||
| US 4705500 A, 10.11.1987 | |||
| УСТРОЙСТВА И СПОСОБЫ ЛИПОСАКЦИИ И ОКРУЖАЮЩИЕ ЭЛЕМЕНТЫ АСПИРАЦИОННОЙ СИСТЕМЫ И СПОСОБЫ | 2002 |
|
RU2300393C2 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |

