Изобретение относится к области электротехники и может использоваться для синтеза частотных фильтров, обеспечивающих минимизацию искажений тока и напряжения в системах генерации, преобразования и распределения электрической энергии. Предлагаемый способ может применяться в синтезаторах фильтров, а также в регуляторах многочастотных адаптивных устройств фильтрации спектра, структура и параметры которых определяются в реальном масштабе времени на основании измерений.
Известен способ для определения расстройки параметров элементов трехчастотных фильтров (см. патент Китая № CN 102401866 А, М. кл. G01R 27/02, G01R 31/00, опубл. 04.04.2012 г.). Структура таких фильтров состоит из трех последовательно индуктивно-емкостных колебательных контуров, первый из которых является последовательным индуктивно-емкостным колебательным контуром (C1, L1), а остальные (второй и третий) - параллельными индуктивно-емкостными колебательными контурами. При этом частоты пропускания (частоты настройки), а также установленные индуктивности и емкости колебательных контуров фильтра изначально известны. Способ позволяет определить расстройку индуктивностей и емкостей (изменение емкостей и индуктивностей) трехчастотного фильтра при различных неисправностях или авариях, путем измерения значений тока и напряжения на частотах пропускания фильтра. На основании измеренных значений тока и напряжения определяют сопротивления колебательных контуров фильтра, вычисляют индуктивности и емкости, которые изменились в результате аварий, и сравнивают эти вычисленные значения индуктивностей и емкостей с теми индуктивностями и емкостями, которые были изначально установлены и известны до возникновения каких-либо аварийных ситуаций.
Однако способ не позволяет задать требуемые параметры частотной характеристики фильтра - частоты пропускания и задерживания, задать требуемые параметры установки фильтра - основную частоту (номинальную частоту), напряжение и реактивную мощность на основной частоте, кроме того, в способе нет возможности произвести синтез фильтра по заданным параметрам, то есть по заданным параметрам определить структуру и параметры элементов фильтра (значения емкостей и индуктивностей колебательных контуров) для реализации фильтра. Таким образом, способ не может использоваться для синтеза частотных фильтров с целью реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Известен способ для проектирования и определения параметров элементов трехчастотных фильтров (см. патент Китая № CN 102044877 А, М. кл. H02J 3/01, H02J 3/18, опубл. 04.05.2011 г.), позволяющий определить параметры элементов фильтров с количеством частот пропускания, равным трем. Структура таких фильтров состоит из трех последовательно соединенных индуктивно-емкостных колебательных контуров, первый из которых является последовательным индуктивно-емкостным колебательным контуром (C1, L1), а остальные (второй и третий) - параллельными индуктивно-емкостными колебательными контурами.
Способ осуществляется следующим образом.
Задают три частоты пропускания фильтра (частоты, на которых сопротивление фильтра имеет минимальные значения), задают напряжение и реактивную мощность на основной (номинальной) частоте для трех эквивалентных одноконтурных одночастотных фильтров, которые представляют собой последовательные индуктивно-емкостные колебательные контуры, при этом собственные частоты эквивалентных одноконтурных одночастотных фильтров должны совпадать с заданными частотами пропускания трехчастотного фильтра. Далее, по заданным частотам пропускания, напряжению и реактивной мощности на основной частоте производят вспомогательные вычисления для определения индуктивностей и емкостей трех эквивалентных одноконтурных одночастотных фильтров, по которым вычисляют емкость последовательного индуктивно-емкостного колебательного контура трехчастотного фильтра как суммы емкостей эквивалентных одноконтурных одночастотных фильтров, а также вычисляют эквивалентные сопротивления. На основании вычисленных данных, определяют неизвестные индуктивности и емкости индуктивно-емкостных колебательных контуров трехчастотного фильтра.
Приведенный способ позволяет определить параметры элементов фильтра по заданным параметрам частотной характеристики и установки фильтра.
Однако в способе не задают частоты задерживания (частоты, на которых сопротивление фильтра имеет максимальные значения), что приводит к низкой точности задания параметров частотной характеристики и, следовательно, недостаточной точности определения параметров элементов фильтра. Способ не может осуществить синтез фильтров при количестве частот пропускания n, где 1≤n≤3 и 3≤n≤∞ (n - целое число), что значительно сужает спектры фильтрации синтезируемых фильтров и уменьшает возможности фильтрации искажений тока и напряжения в системах генерации, преобразования и распределения электрической энергии. Способ имеет низкую вычислительную эффективность, так как содержит большое количество вычислительных операций для определения параметров элементов фильтра, что снижает эффективность способа при использовании в системах, работающих в реальном масштабе времени. Для параметров установки и частотной характеристики в способе не определены диапазоны значений задаваемых величин. Это приводит к неточностям и ошибкам в определении параметров элементов фильтра и также снижает вычислительную эффективность. Таким образом, способ не предназначен для синтеза фильтров на основании измерений в реальном масштабе времени и не может использоваться при синтезе частотных фильтров с целью реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Известен способ для определения параметров элементов и проектирования двух или трехчастотных фильтров (см. Barker С, Davidson С, Gold J., Kirby N., Macleod N., McConnachie I., Monteiro J. Oh'Eidhin G., Stevenson D., Whitehouse R., Jenkins A., Ebockayuk D., Kayibabu В., Li M., Matthews В., Mendiratta G., Mukhedkar R., Sadullan S., Stott Т., Wu X. HVDC: Connecting to the future. - Alstom Grid, 2011 г., стр. 562-567), который позволяет определить параметры элементов фильтров с количеством частот пропускания, равным двум (для двухчастотного фильтра) или трем (для трехчастотного фильтра). Структура таких фильтров содержит два (для двухчастотного фильтра) или три (для трехчастотного фильтра) последовательно индуктивно-емкостных колебательных контура, первый из которых является последовательным индуктивно-емкостным колебательным контуром (C1, L1), а остальные - один (для двухчастотного фильтра) или два (для трехчастотного фильтра) параллельными индуктивно-емкостными колебательными контурами.
Способ осуществляется следующим образом.
1. Задают основную частоту f0, напряжение Uф и реактивную мощность Qф фильтра на частоте f0.
2. Задают две (fs1, fs2) - для двухчастотного, или три (fs1, fs2, fs3) - для трехчастотного фильтра частоты пропускания.
3. Задают одну (fp1) - для двухчастотного фильтра, или две (fp1 и fp2) - для трехчастотного фильтра частоты задерживания.
4. Вычисляют вспомогательные величины по формулам: для двухчастотного фильтра:
x1=(ωs1)2=(2·π·f0·ns1)2,
x2=(ωs2)2=(2·π·f0·na2)2,
xp=(ωp1)2=(2·π·f0·nP1)2,
 ,
,
для трехчастотного фильтра:
x1=(ωs1)2=(2·π·f0·ns1)2,
x2=(ωs2)2=(2·π·f0·ns2)2,
x3=(ωs3)2=(2·π·f0·ns3)2,
k2=(ωp1)2=(2·π·f0·np1)2,
k3=(ωp2)2=(2·π·f0·np2)2,
 ,
,
где
ωs1, ωs2, ωs3 - круговые частоты пропускания фильтра,
ωp1, ωp2, ωp3 - круговые частоты задерживания фильтра,





π≈3,1415926535.
5. Определяют емкость C1 последовательного колебательного контура фильтра, по формулам:
для двухчастотного фильтра:
 ,
,
для трехчастотного фильтра:
 ,
,
где ω=2·π·f0 - номинальная круговая частота.
6. Определяют индуктивности фильтра по формулам:
для двухчастотного фильтра:
 ,
,
 ,
,
для трехчастотного фильтра:
 ,
,
 ,
,
 ,
,
7. Определяют емкости параллельных индуктивно-емкостных колебательных контуров фильтра по формулам:
для двухчастотного фильтра:
 ,
,
для трехчастотного фильтра:
 ,
,
 .
.
Данный способ позволяет задавать частоты задерживания, повышая точность задания параметров частотной характеристики, что обеспечивает более точное определение параметров элементов фильтра. Способ имеет более высокую вычислительную эффективность, так как уменьшает, по сравнению с предыдущим аналогом, количество вычислительных операций для определения параметров элементов трехчастотного фильтра, повышая вычислительную эффективность при использовании в системах, работающих в реальном масштабе времени.
Однако способ не может осуществить синтез фильтров при количестве частот пропускания n, где n=1 и 3<n<∞ (n - целое число), что значительно сужает спектры фильтрации синтезируемых фильтров и, следовательно, уменьшает возможности фильтрации искажений тока и напряжения в системах генерации, преобразования и распределения электрической энергии. Для параметров установки и частотной характеристики в способе не определены диапазоны значений задаваемых величин. Это приводит к неточностям и ошибкам в определении параметров элементов фильтра и снижает вычислительную эффективность. Таким образом, способ не предназначен для синтеза фильтров на основании измерений в реальном масштабе времени и не может использоваться при синтезе частотных фильтров с целью реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Данный способ выбран в качестве прототипа.
Достигаемым техническим результатом изобретения является расширение спектров частот фильтрации синтезируемых частотных фильтров, повышение точности и вычислительной эффективности синтеза частотных фильтров, а также возможность использования способа при синтезе частотных фильтров с целью реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Указанный технический результат достигается в способе синтеза частотных фильтров, в котором задают основную частоту f0, напряжение Uф и реактивную мощность Qф фильтра на частоте f0, задают две или три частоты fs пропускания фильтра, задают одну или две частоты fp задерживания фильтра, определяют емкость C1 последовательного индуктивно-емкостного колебательного контура двух или трехчастотного фильтра, определяют индуктивности двух или трехчастотного фильтра, определяют емкости параллельных индуктивно-емкостных колебательных контуров двух или трехчастотного фильтра, отличающемся тем, что задание частоты f0, напряжения Uф и реактивной мощности Qф фильтра на частоте f0 осуществляют путем измерений, при этом f0, Uф и Qф проверяют на выполнение условий:
0≤f0<∞,
0≤Uф<∞,
0≤Qф<∞,
до тех пор, пока условия не будут выполнены, причем если величина f0=0, то Uф и Qф не используют при синтезе фильтра, затем задают частоты fs пропускания фильтра путем измерения, при этом количество частот пропускания равно n, где 1≤n<∞ (n - целое число), а из n частот пропускания (fs1…fsn) формируют последовательность частот в порядке возрастания их значений согласно условиям:
f0<fsi<fs(i+1)< ∞, при 2≤n<∞,
и
f0<fsn<∞, при n=1,
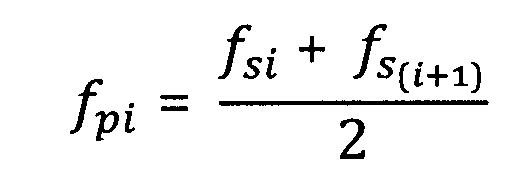
где i=1…(n-1) - ряд натуральных чисел (порядковый номер), fsi -значение i-й частоты пропускания, fsn - значение n-й частоты пропускания, после этого определяют частоты fp задерживания фильтра, при этом количество частот задерживания равно (n-1), причем частоты задерживания (fp1…fp(n-1)) определяют либо путем формирования последовательности частот в порядке возрастания их значений согласно условию:
fsi<fpi<fs(i+1), при 2≤n<∞,
либо путем вычисления их значений по формуле:
 , при 2≤n<∞,
, при 2≤n<∞,
где fpi - значение i-й частоты задерживания, далее определяют структуру фильтра, при этом определяемая структура фильтра будет содержать n последовательно индуктивно-емкостных колебательных контуров, первый из которых является последовательным индуктивно-емкостным колебательным контуром, а остальные [n-1] колебательных контуров являются параллельными индуктивно-емкостными колебательными контурами, после определения структуры фильтра, при 0<f0<∞ вычисляют значение емкости C1 по формуле:
 ,
,
где
 ,
,
 ,
,
Δ=2·π,
а при f0=0, значение емкости C1 задают таким образом, чтобы выполнялось условие:
0<C1<∞,
далее формируют матрицу A[n×(n+1)] синтезируемого фильтра, которая представляет собой матрицу размерностью [n×(n+1)]:
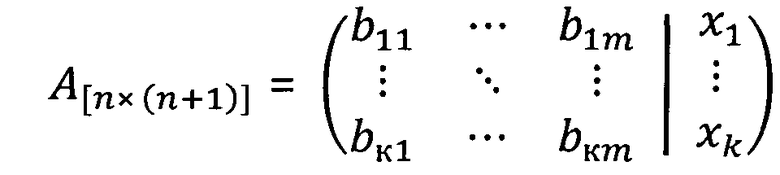 ,
,
состоящую из квадратной матрицы B[n×n] размерностью [n×n]:
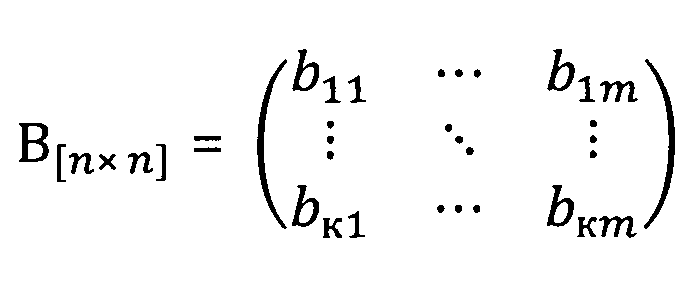 ,
,
с добавлением к ней вектор-столбца X[n×1] размерностью [n×1]:
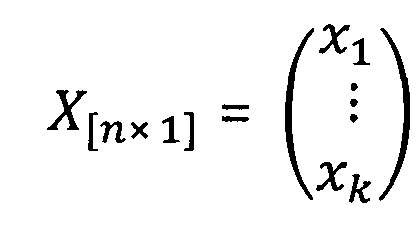 ,
,
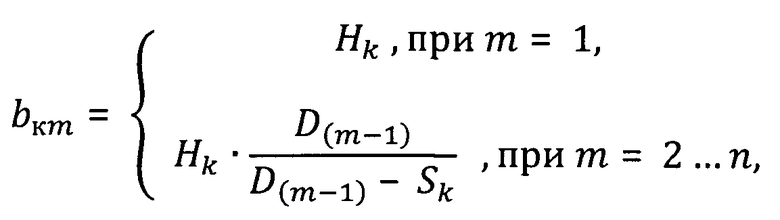
где k=1…n и m=1…71 - натуральные ряды чисел (индексы элементов bkm и xk), при этом значения элементов матрицы B[n×n] и вектор-столбца X[n×1], которые являются также коэффициентами матрицы A[n×(n+1)], определяют по формулам:
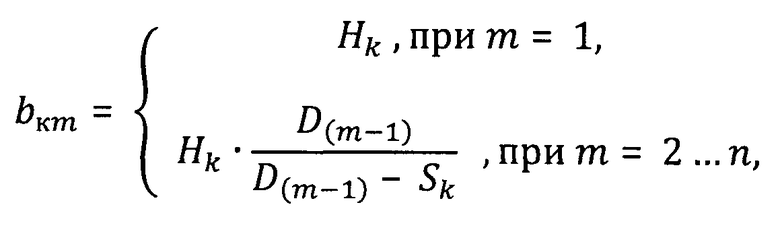
 ,
,
где
Sk=(Hk)2,
D(m-1)=(P(m-1))2 (для m=2…n),
P(m-1)=Δ·fpi((m-1)=i,m=2…n),
 ,
,
после формирования матрицы синтезируемого фильтра определяют n индуктивностей Lk, входящих в структуру фильтра, путем решения матрицы A[n×(n+1)] с использованием алгоритма Гаусса-Жордана или других численных методов, затем для k=2…n вычисляют [n-1] емкостей Ck параллельных индуктивно-емкостных колебательных контуров фильтра по формуле:
 , (k=2…n и m=k),
, (k=2…n и m=k),
после чего производят вывод данных об определенных структуре и параметрах элементов фильтра, а также о заданных и измеренных величинах с целью физической реализации фильтров, а также с целью мониторинга синтезируемых фильтров.
При этом, в отличие от прототипа, каждую из величин f0, Uф и Qф измеряют, причем измерение f0, Uф и Qф выполняют согласно условиям, исключающим ошибки в определении параметров элементов, что обеспечивает повышение вычислительной эффективности и точности синтеза фильтров для реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии. Кроме этого возможность синтеза фильтров при f0=0 позволяет реализовывать синтезируемые фильтры в системах постоянного тока.
Каждую из частот fs пропускания фильтра измеряют, при этом количество частот пропускания равно n, где 1≤n<∞ (n - целое число), что позволяет расширить спектры фильтрации синтезируемых фильтров, причем из частот fs формируют последовательность частот, значения которых располагаются в порядке возрастания, что исключает ошибки, повышает точность и вычислительную эффективность синтеза частотных фильтров для реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Определение (n-1) частот fp задерживания позволяет получить требуемое количество частот пропускания для реализации частотной характеристики фильтра, при этом за счет формирования последовательности частот в порядке возрастания их значений исключаются ошибки и повышается точность определения параметров элементов фильтра, что позволяет повысить точность и вычислительную эффективность синтеза частотных фильтров для реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Определение структуры фильтра позволяет при n измеренных частотах пропускания и (n-1) определенных частотах задерживания (параметрах частотной характеристики фильтра) определить схему синтезируемого фильтра, которая необходима для его физической реализации в системах генерации, преобразования и распределения электрической энергии.
Вычисление емкости C1 последовательного колебательного контура фильтра позволяет вычислить значение емкости C1 для фильтра с любой структурой, которая была определена. Помимо этого задание емкости C1 без дополнительных вычислений, по условию 0<C1<∞, дает возможность повысить вычислительную эффективность синтеза частотных фильтров и обеспечить синтез фильтров для систем постоянного тока при f0=0.
Формирование матрицы синтезируемого фильтра, которая представляет собой матрицу A[n×(n+1)] коэффициентов, позволяет учесть характер сопротивлений колебательных контуров синтезируемого фильтра определенной структуры. При помощи матрицы синтезируемого фильтра производится дальнейшее определение n индуктивностей фильтра. Формирование матрицы A[n×(n+1)] способствует уменьшению количества вычислительных операций и повышает вычислительную эффективность способа при синтезе частотных фильтров в системах, работающих в реальном масштабе времени при n>3, следовательно, повышается вычислительная эффективность синтеза фильтров для адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Определение n индуктивностей фильтра путем решения матрицы A[n×(n+1)] с использованием алгоритма Гаусса-Жордана или других численных методов позволяет определить n индуктивностей Lk фильтра, (n-1) из которых используются для дальнейших вычислений (n-1) емкостей параллельных индуктивно-емкостных колебательных контуров фильтра, при этом использование алгоритма Гаусса-Жордана обеспечивает снижение количества вычислительных операций и повышает вычислительную эффективность синтеза фильтров для реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Вычисление емкостей Ck(для k=2…n) параллельных индуктивно-емкостных колебательных контуров фильтра по определенным (n-1) значениям индуктивностей параллельных индуктивно-емкостных колебательных контуров дает возможность вычислить значения [n-1] емкостей [n-1] параллельных индуктивно-емкостных колебательных контуров фильтра, структура которого была определена.
Вывод данных об определенных структуре, параметрах элементов фильтра, заданных и измеренных величинах позволяет использовать эти данные для физической реализации фильтров в системах генерации, преобразования и распределения электрической энергии, а также для мониторинга синтезируемых фильтров.
Таким образом, введенные в предлагаемый способ синтеза частотных фильтров отличия обеспечивают достижение технического результата.
Сущность способа поясняется чертежами.
На фиг. 1 представлен пример устройства адаптивной фильтрации спектра для реализации предлагаемого способа синтеза частотных фильтров в системах генерации, преобразования и распределения электрической энергии. Согласно фиг. 1, устройство содержит блок 1 физической реализации фильтров (ФРФ), датчик 2 напряжения (ДН), датчик 3 тока (ДТ), блок 4 измерений и анализа сигналов (ИАС), первый вычислительный блок (ВБ) 5, блок 6 определения структуры синтезируемого фильтра (ОССФ), блок 7 формирования матрицы синтезируемого фильтра (ФМСФ), второй вычислительный блок (ВБ) 8, третий вычислительный блок (ВБ) 9, блок 10 ввода-вывода данных (ВВД), автоматизированное рабочее место (АРМ) 11, блок 12 управления (БУ), при этом первый вход блока 1 ФРФ подключен к фазе электрической сети, к которой подключен вход ДН 2, а также первый и второй входы ДТ 3, выход которого соединен с первым входом блока 4 ИАС, второй вход которого подключен к выходу ДН 2, а первый выход блока 4 ИАС соединен с первым входом первого ВБ 5, второй вход которого связан со вторым выходом блока 4 ИАС, к которому подключен первый вход блока 6 ОССФ, а также первый вход блока 7 ФМСФ, второй вход которого соединен с выходом первого ВБ 5, а первый выход блока 7 ФМСФ связан со входом второго ВБ 8, выход которого подключен к первому входу третьего ВБ 9, а также к первому входу блока 10 ВВД, второй вход которого связан с выходом третьего ВБ 9, второй вход которого соединен со вторым выходом блока 7 ФМСФ, третий вход/выход блока 10 ВВД подключен к выходу/входу АРМ 11, а четвертый вход/выход блока 10 ВВД соединен с третьим входом блока 7 ФМСФ, а также со вторым входом блока 6 ОССФ и третьим входом первого ВБ 5, четвертый вход/выход которого связан с пятым выходом/входом блока 10 ВВД, шестой вход/выход которого подключен к третьему выходу/входу блока 4 ИАС, а седьмой выход блока 10 ВВД соединен со входом БУ 12, выход которого подключен ко второму входу блока 1 ФРФ, выход которого связан с восьмым входом блока 10 ВВД.
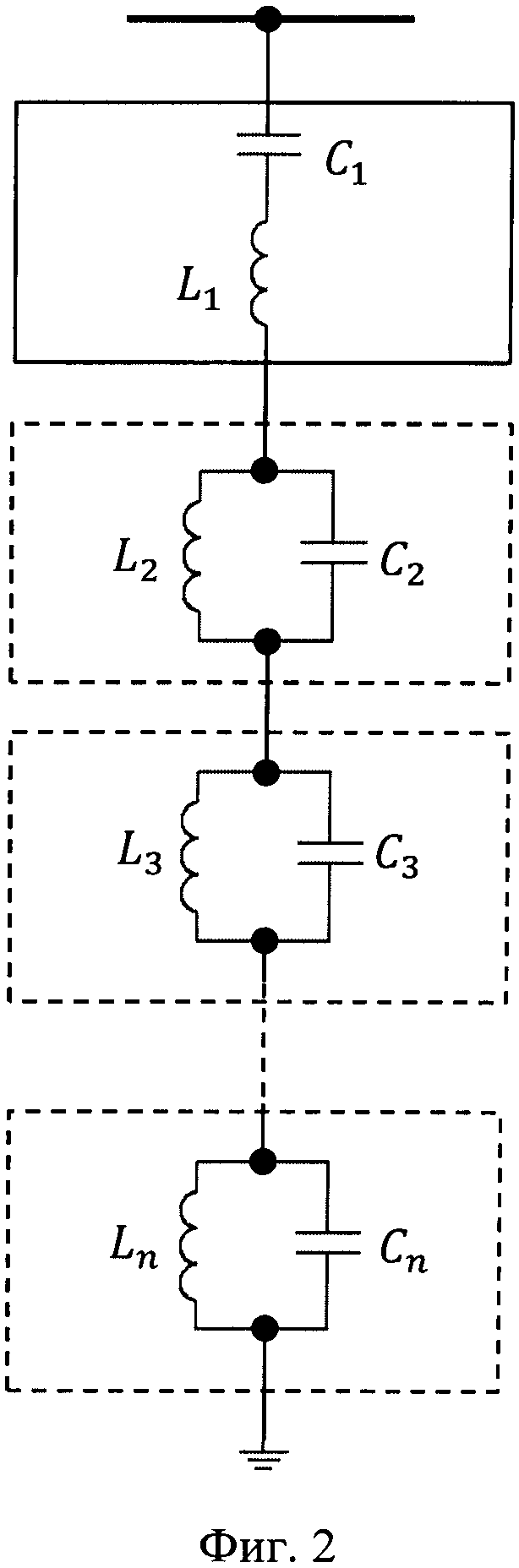
На фиг. 2 показана общая структура для n - частотных фильтров, которые могут быть синтезированы при помощи способа.
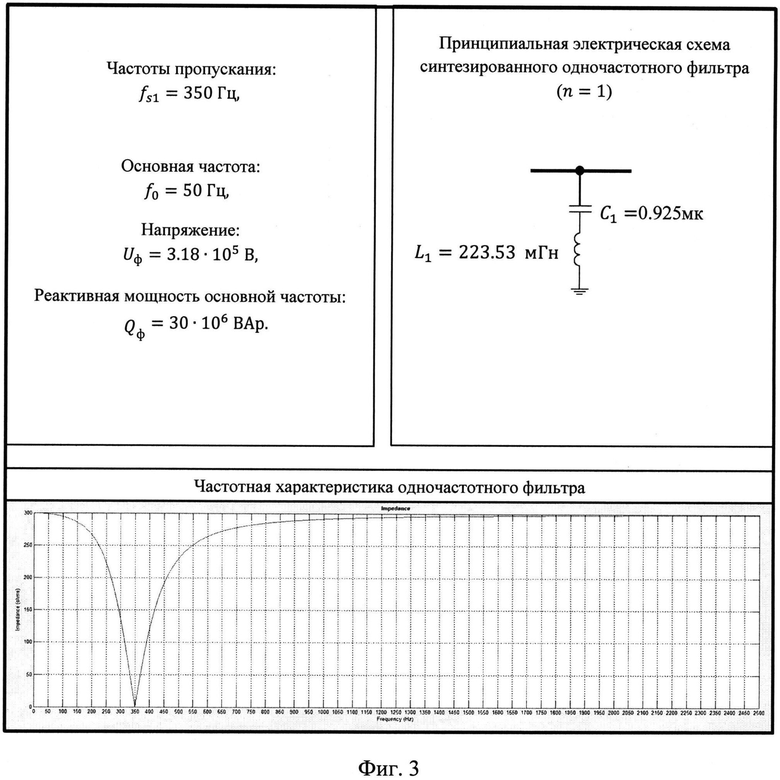
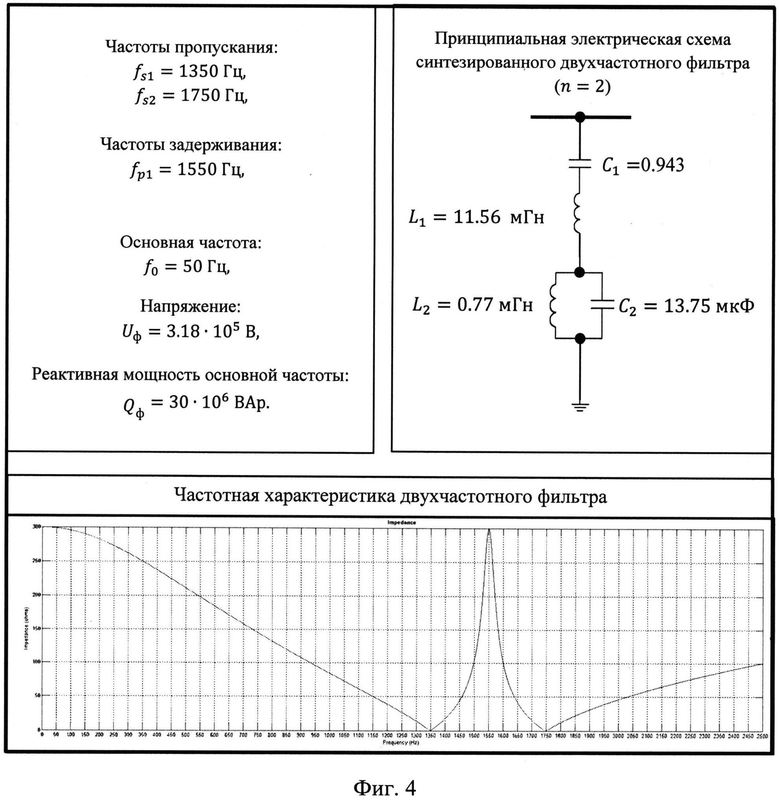
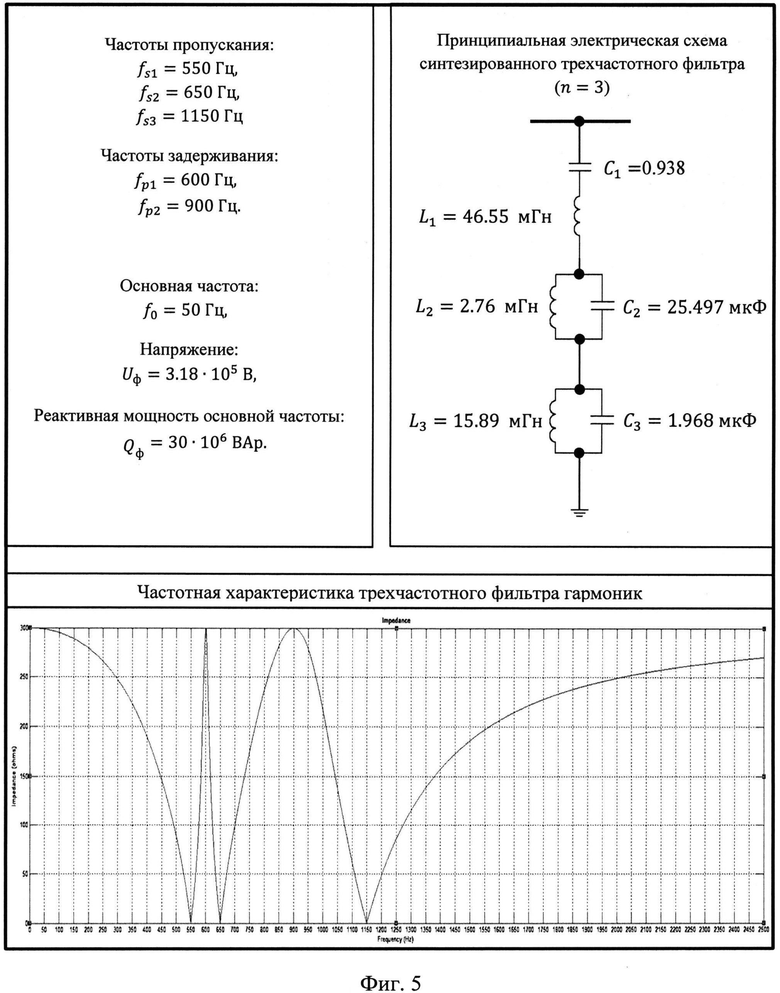
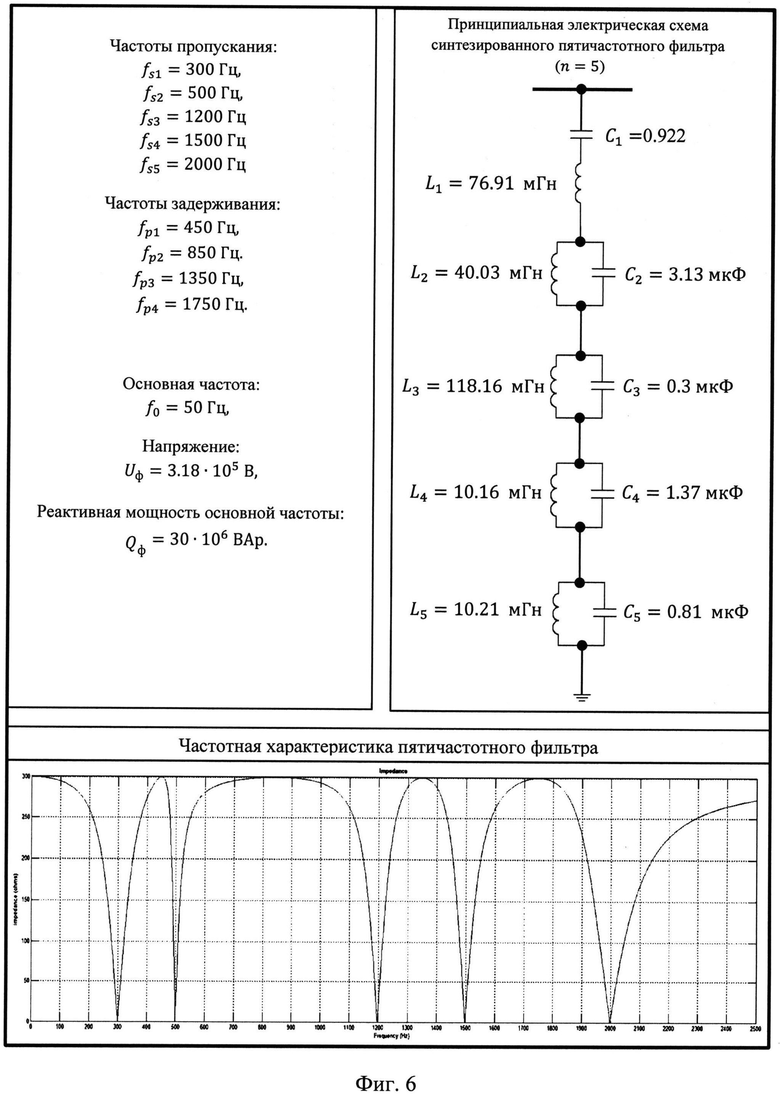
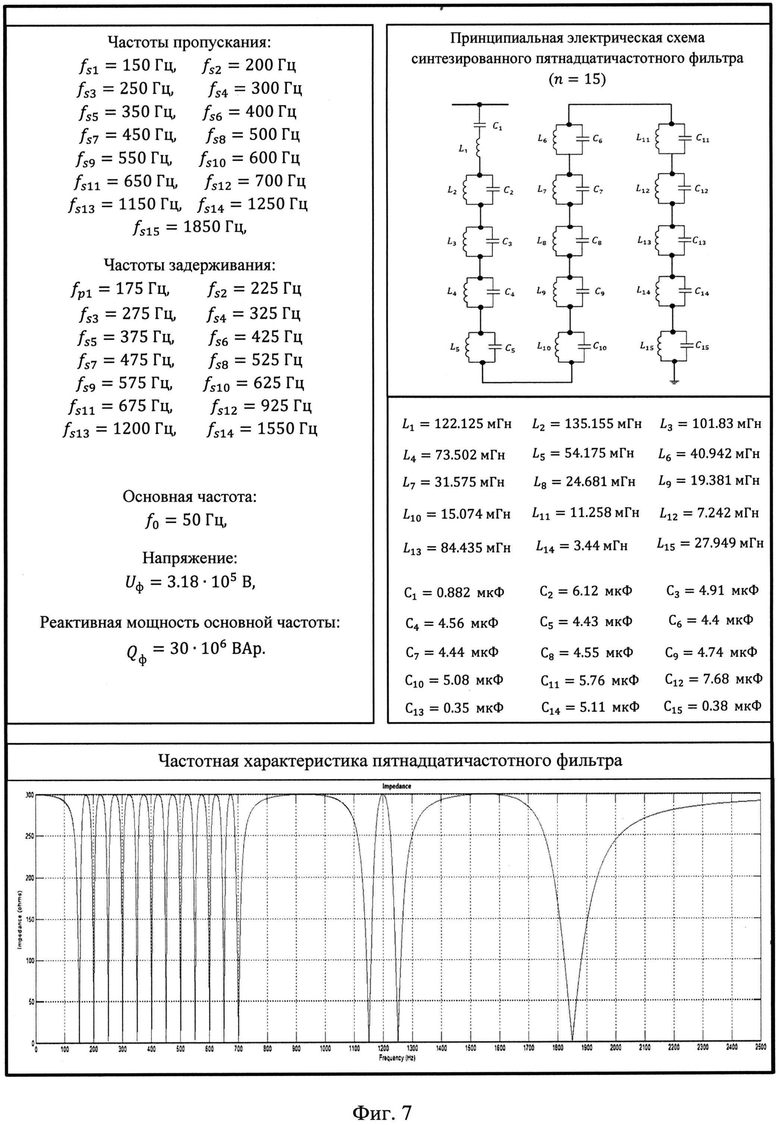
На фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7 изображены принципиальные электрические схемы синтезированных предлагаемым способом фильтров с одночастотной, двухчастотной, трехчастотной, пятичастотной и пятнадцатичастотной настройкой соответственно, а также частотные характеристики синтезированных фильтров.
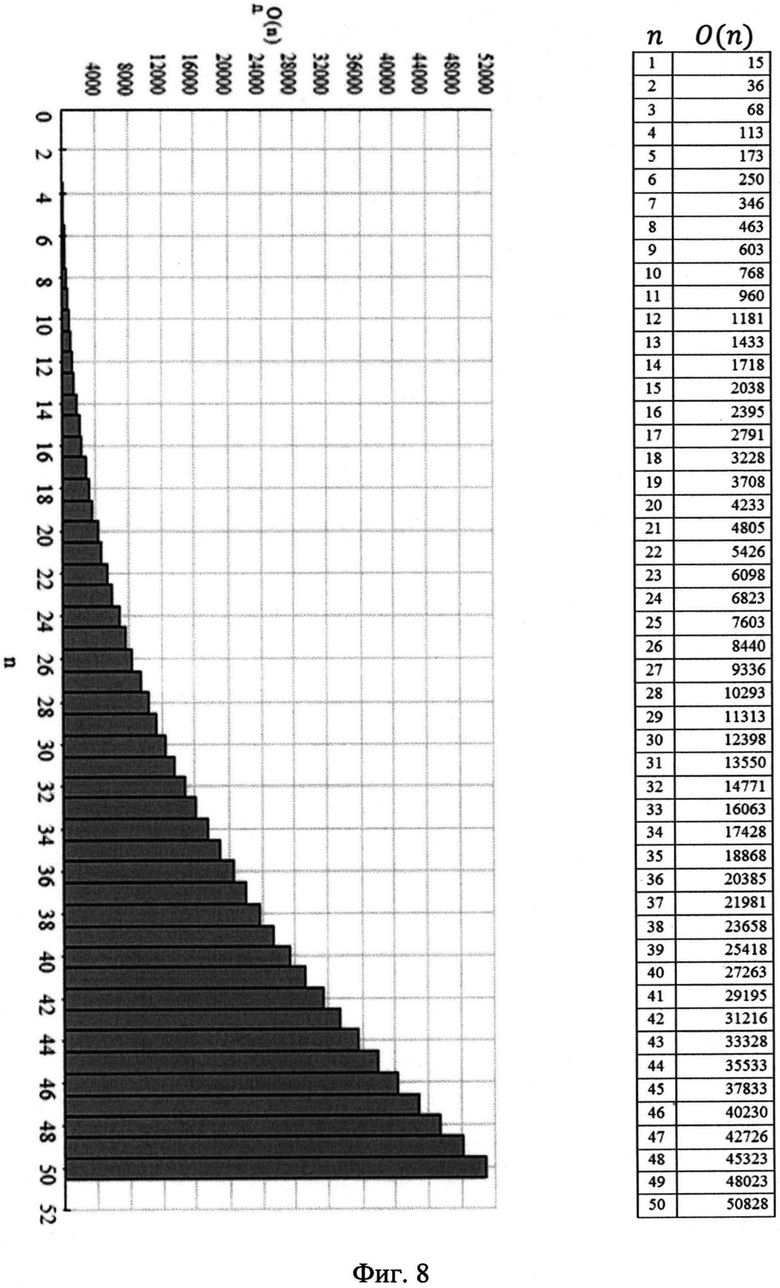
На фиг. 8 отображается график вычислительной эффективности предлагаемого способа, характеризуемой суммарным количеством O[n] умножений и делений, производимых при синтезе фильтров, в зависимости от количества n частот пропускания.
Способ осуществляется следующим образом.
Согласно примеру реализации способа по фиг. 1, измеряют или задают параметры установки фильтра, то есть основную частоту f0, напряжение Uф и реактивную мощность Qф фильтра на частоте f0 до тех пор, пока не будут выполнены условия:



Каждую из перечисленных величин можно либо измерять (автоматический режим) при помощи блока 4 ИАС по сигналам, поступающим в блок 4 ИАС с датчиков мгновенных значений ДН 2 и ДТ 3, установленных в фазе электрической сети, либо f0, Uф и Qф можно задавать (автоматизированный режим) при помощи АРМ 11, который формирует и направляет сигналы со значениями задаваемых величин в блок 10 ввода-вывода данных (ВВД). Выбор величин, которые будут задаваться и (или) которые будут измеряться, может быть осуществлен на этапе проектирования устройства и (или) при работе устройства с помощью АРМ 11. Проверка выполнения условий (1), (2) и (3) производится или в блоке 4 ИАС после измерения f0, Uф и Qф, или в блоке 10 ВВД после задания соответствующих значений, или и там и там, если значения и измеряются и задаются. При f0=0, Uф и Qф не используют при синтезе фильтра, а значение f0 направляется в первый вычислительный блок (ВБ) 5 либо из блока 4 ИАС, если f0 измеряли, либо из блока 10 ВВД, если f0 задавали при помощи АРМ 11.
При 0<f0<∞ данные с измеренными и (или) заданными значениями величин f0, Uф и Qф направляются в первый ВБ 5 из блока 4 ИАС и (или) из блока 10 ВВД. Кроме этого данные с измеренными при помощи блока 4 ИАС значениями направляются в блок 10 ВВД.
Далее, измеряют или задают n частот пропускания фильтра (1≤n<∞) и формируют последовательность частот в порядке возрастания их значений, согласно условиям:


где i=1…(n-1) - ряд натуральных чисел, fsi - значение i-й частоты пропускания, fsn - значение n-й частоты пропускания.
Каждую из n частот пропускания можно измерять (автоматический режим) при помощи блока 4 ИАС по сигналам, поступающим в блок 4 ИАС с датчиков мгновенных значений ДН 2 и ДТ 3, которые могут быть установлены в фазе электросети, или каждую из n частот пропускания можно задавать (автоматизированный режим) при помощи АРМ 11, который направляет сигналы с заданными значениями частот в блок 10 ВВД. Данные с измеренными и (или) заданными значениями частот пропускания направляются из блока 4 ИАС и (или) из блока 10 ВВД в первый ВБ 5, при помощи которого формируют последовательность по условиям (4) и (5). Кроме этого данные с измеренными и (или) заданными значениями частот пропускания направляются в блок 6 определения структуры синтезируемого фильтра (ОССФ) и в блок 7 формирования матрицы синтезируемого фильтра (ФМСФ).
Далее, при 2≤n<∞ либо определяют в автоматизированном режиме при помощи АРМ 11 [n-1] частот задерживания фильтра, задавая и формируя из заданных значений последовательность частот в порядке возрастания значений согласно условию:

либо вычисляют частоты задерживания в автоматическом режиме при помощи ИАС 4 или в блоке 10 ВВД по формуле:

где fpi - значение i-й частоты задерживания.
При определении частот задерживания в автоматизированном режиме при помощи АРМ 11 формируют и направляют сигналы со значениями частот задерживания в блок 10 ВВД, при помощи которого проверяют и выполняют условие (6), или соответствующие значения определяют путем вычислений по формуле (7). Определение частот задерживания производят только при условии 2≤n<∞ (проверяют или в блоке 4 ИАС, или в блоке 10 ВВД), так как при n=1 определяют ноль частот задерживания. Таким образом, частоты задерживания можно определить или по условию (6), или путем вычисления при помощи формулы (7) по измеренным или заданным значениям частот пропускания. Данные с определенными частотами задерживания направляются из блока 4 ИАС или из блока 10 ВВД в первый ВБ 5, а также в блок 6 ОССФ и в блок 7 ФМСФ.
Измерение или задание частот пропускания, а также определение частот задерживания позволяет получить требуемую частотную характеристику фильтра для ее реализации.
После этого по параметрам частотной характеристики при помощи блока 6 ОССФ определяют необходимую структуру (схему) фильтра. При этом определяемая структура фильтра (см. фиг. 2) будет содержать n последовательно индуктивно-емкостных колебательных контуров, первый из которых является последовательным индуктивно-емкостным колебательным контуром (С1,L1), а остальные [n-1] колебательных контуров являются параллельными индуктивно-емкостными колебательными контурами. Данные об определенной структуре фильтра направляются из блока 6 ОССФ в блок 10 ВВД.
Далее, с помощью первого ВБ 5 при 0<f0<∞ вычисляют значение емкости C1 по формуле:
где



Если f0=0, то значение емкости C1 задают при помощи АРМ 11 таким образом, чтобы выполнялось условие:

при этом АРМ 11 формирует и направляет сигнал со значением емкости C1 в блок 10 ВВД, который направляет сигнал с заданным значением емкости в первый ВБ 5, который при 0<f0<∞ направляет вычисленное значение емкости C1 в блок 10 ВВД, а также в блок 7 ФМСФ.
Далее, при помощи блока 7 ФМСФ формируют матрицу синтезируемого фильтра A[n×(n+1)] размерностью [n×(n+1)]:

которая состоит из квадратной матрицы B[n×n] размерностью [n×n]:

с добавлением к ней вектор-столбца X[n×1] размерностью [n×1]:

где k=1…n и m=1…n - натуральные ряды чисел (индексы элементов bkm и xk).
Элементы матрицы B[n×n] и вектор-столбца X[n×1], которые являются также коэффициентами матрицы A[n×(n+1)], вычисляют при помощи блока 7 ФМСФ по формулам:

где





При этом сформированная матрица использует все заданные, измеренные, вычисленные и определенные в предыдущих действиях величины для дальнейшего вычисления n индуктивностей синтезируемого фильтра, структура которого была определена по параметрам частотной характеристики. Блок 7 ФМСФ направляет необходимые вычисленные значения коэффициентов матрицы A[n×(n+1)] во второй ВБ 8 и в третий ВБ 9.
Далее, при помощи второго ВБ 8 вычисляют n индуктивностей Lk фильтра путем решения матрицы A[n×(n+1)] с использованием численных методов, например при помощи алгоритма Гаусса-Жордана (см. Ващенко Г. В. Вычислительная математика. Основы конечных методов решения систем линейных алгебраических уравнений: Красноярск: СибГТУ 2005, стр. 43-50).
В результате решения образуется матрица A'[n×(n+1)]:

При этом квадратная матрица B[n×n], изначально входящая в состав матрицы A[n×(n+1)], после решения A[n×(n+1)] приводится к виду единичной матрицы и представляет собой матрицу B'[n×n].

размерностью [n×n], все элементы главной диагонали которой равны единице: b′km=1 (при k=m). Остальные элементы матрицы B′[n×n] равны нулю, b′km=0 (при k≠m). Вектор-столбец X[n×1] при решении матрицы A[n×(n+1)] преобразуется в вектор-столбец X′[n×1]:

Каждый k-й элемент x′k вектор-столбца X′[n×1] имеет значение, равное значению k-й индуктивности Lk k-го колебательного контура фильтра (где k=1…n), то есть:

Таким образом, значения n индуктивностей фильтра соответствуют значениям n элементов вектор-столбца X′[n×1]. Решение матрицы A[n×(n+1)] может быть осуществлено и при помощи других численных методов. Второй ВБ 8 формирует и направляет сигналы со значениями индуктивностей фильтра в третий ВБ 9 и в блок 10 ВВД.
Далее, по условию резонанса на определенных частотах задерживания при помощи третьего ВБ 9 определяют (n-1) емкостей параллельных индуктивно-емкостных колебательных контуров фильтра, по формуле:

Из третьего ВБ 9 сигналы со значениями емкостей параллельных колебательных контуров фильтра поступают в блок 10 ВВД.
После этого при помощи блока 10 ВВД производят вывод данных об определенных структуре, параметрах элементов фильтра и измеряемых значениях - в АРМ 11 для визуализации и мониторинга синтезируемых фильтров, а также в блок управления (БУ) 12, где могут формироваться сигналы управления блоком 1 ФРФ, поступающие в блок 1 ФРФ, в котором содержаться наборы дискретных индуктивностей, емкостей, и управляемые коммутирующие устройства. При этом блок 1 ФРФ обеспечивает формирование силовой электрической схемы фильтра, структура и параметры элементов которого в точности совпадают со структурой и параметрами элементов, которые были определены и вычислены. Кроме этого блок 1 ФРФ может направлять сигналы, характеризующие состояние своей работы, в блок 10 ВВД.
Таким образом, при помощи предложенного способа можно синтезировать фильтры с любым требуемым спектром фильтруемых частот, количество которых равно n, где 1≤n<∞, что расширяет спектры фильтрации синтезируемых частотных фильтров.
Например, при помощи способа могут быть синтезированы фильтры с одно, двух, трех, пяти и пятнадцати частотной настройкой (см. фиг. 3, фиг. 4, фиг. 5, фиг. 6 и фиг. 7). Для указанных фильтров максимальные значения частотных характеристик, изображенных на фигурах, ограничены значением сопротивления нагрузки Z=300 Ом.
Вычислительную эффективность способа в данном случае можно представить через суммарное количество 0[n] производимых умножений и делений (вычислительная сложность) при определении параметров элементов фильтра. В общем случае для фильтра при 1≤n<∞ суммарное количество 0[n] производимых умножений и делений выражается зависимостью:

которая отображается на графике, показанном на фиг. 8, где также представлена таблица значений 0[n] для n от 1 до 50.
Например, при синтезе трехчастотного фильтра предлагаемым способом, согласно формуле (30), 0[n]=68, а для двухчастотного фильтра 0[n]=36, и эти значения для трехчастотных и двухчастотных фильтров неизменны, так как исключены ошибки при синтезе. Для сравнения, способ-прототип в предположении безошибочного задания параметров установки и частотной характеристики суммарно содержит для трехчастотного 0[n]=74, для двухчастотного фильтра 0[n]=36, а при ошибках в задании параметров, которые неизбежны в прототипе и приводят к ошибкам синтеза, а также к необходимости заново осуществлять синтез, суммарное количество умножений и делений может возрастать в два и более раз, значительно снижая вычислительную эффективность, время и точность синтеза в системах, работающих в реальном масштабе времени.
Таким образом, по сравнению с прототипом предложенный способ имеет более высокую точность и вычислительную эффективность.
Как видим, результат, достигнутый в настоящем изобретении, позволяет расширить спектры частот фильтрации синтезируемых частотных фильтров, повысить точность и вычислительную эффективность синтеза частотных фильтров, а также обеспечить возможность использования способа при синтезе частотных фильтров с целью реализации адаптивных устройств фильтрации спектра в системах генерации, преобразования и распределения электрической энергии.
Приведем пример синтеза реактивного трехчастотного (n=3) фильтра гармоник, который может применяться на преобразовательных подстанциях, системах распределения электроэнергии и сетях высокого напряжения. Выполним синтез фильтра в автоматизированном режиме в соответствии с предложенным способом согласно описанному выше порядку и варианту реализации способа, представленному на фиг. 1.
Для перехода в автоматизированный режим, при котором необходимые для синтеза величины задаются, с помощью АРМ 11 в блок 4 ИАС направляют команду, которая ставит запрет на использование в синтезе фильтра измеряемых при помощи блока 4 ИАС величин. При этом измеряемые величины могут быть использованы только для мониторинга, но их не используют для определения структуры, а также параметров элементов фильтра.
Далее при помощи АРМ 11 производится задание значений основной частоты f0, напряжения Uф и реактивной мощности Qф фильтра на частоте f0:
f0=50 Гц, Uф=3.18·105 В, QФ=30·106 ВАр.
Сигналы с заданными значениями формируются в АРМ 11 и направляются в блок 10 ВВД для проверки. При помощи блока 10 ВВД производится проверка условий (1), (2) и (3):
0≤f0<∞,
0<Uф<∞,
0<Qф<∞.
Все условия выполнены. Так как f0≠0, блок 10 ВВД направляет информационные сигналы с заданными значениями f0, Uф и Qф в первый ВБ 5.
При помощи АРМ 11 производится задание трех (n=3) частот (fs1,fs2,fs3) пропускания фильтра, значения которых равны:
fs1=550 Гц, fs2=650 Гц, fs3=1150 Гц.
Сигналы с заданными значениями частот формируются в АРМ 11 и направляются через блок ВВД в первый ВБ 5 для проверки и формирования значений согласно условиям (4) и (5).
Так как n=3 используется только условие (4):
f0<fs1<fs2<∞,
f0<fs2<fs3<∞.
В данном случае условия выполнены во всех диапазонах и частоты заданы в нужной последовательности. Первый ВБ 5 направляет информационные сигналы с заданными значениями в блок 6 ОССФ и в блок 7 ФМСФ.
При помощи АРМ 11 производится определение (n-1=2] двух частот (fp1,fp2) задерживания фильтра, значения которых равны:
fp1=600 Гц, fp2=900 Гц.
Сигналы со значениями частот формируются в АРМ 11 и направляются в блок 10 ВВД для проверки и формирования последовательности согласно условию (6):
fs1<fp1<fs2,
fs2<fp2<fs3.
В данном случае условие выполнено во всех диапазонах и частоты определены в нужной последовательности. Блок 10 ВВД направляет информационные сигналы с определенными значениями в первый ВБ 5, а также в блок 6 ОССФ и в блок 7 ФМСФ.
При помощи блока 6 ОССФ производится определение структуры фильтра (см. фиг. 5), которая будет содержать три последовательно индуктивно-емкостных колебательных контура, первый из которых является последовательным индуктивно-емкостным колебательным контуром, а остальные два колебательных контура - параллельными индуктивно-емкостными колебательными контурами.
Блок 6 ОССФ формирует и направляет информационные сигналы, характеризующие структуру фильтра, в блок 10 ВВД.
Так как f0≠0, первый ВБ 5 производит вычисление емкости C1 последовательного колебательного контура фильтра по формуле (8), с предварительными вычислениями по формулам (9-13).
По формулам (9-13) для n=3 получим соответственно:
 ,
,
 ,
,
Δ=2·π≈6.283185 [рад],
 ,
,
 .
.
Вычисляется емкость C1 по формуле (8):
 .
.
Первый ВБ 5 формирует и направляет сигналы со значением емкости C1 в блок 10 ВВД, а также в блок 7 ФМСФ.
При помощи блока 7 ФМСФ производится формирование матрицы A[3×4] синтезируемого фильтра согласно формуле (15).
Для этого в блоке 7 ФМСФ вычисляются элементы матрицы B[n×n] (16) и вектор-столбца X[n×1] (17) по формулам (18) и (19), с предварительными вычислениями по формулам (20-24) при k=[1…3] и m=[2…3].
По формулам (20-24) получили:
H1=Δ·fs1=3455.751919 [рад/с],
H2=Δ·fs2=4084.07045 [рад/с],
H3=Δ·fs3=7225.663103 [рад/с],
S1=(H1)2=11.942221·106 [рад/с]2,
S2=(H2)2=16.679631·106 [рад/с]2,
S3=(H3)2=52.210207·106 [рад/с]2,
P1=Δ·fp1=3769.911184 [рад/с],
P2=Δ·fp2=5654.866777 [рад/с],
D1=(р1)2=14.21223·106 [рад/с]2,
D2=(Р2)2=31.977518·106 [рад/с]2.
 .
.
По формуле (18) для B[n×n] получили:
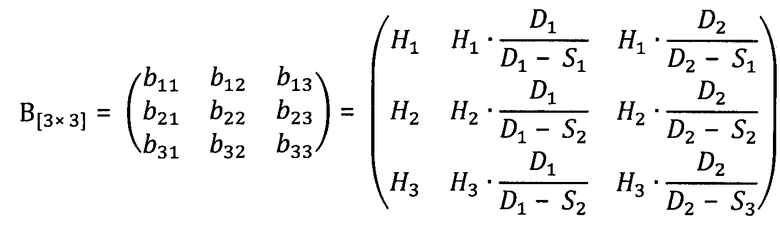 ,
,
или в числовых значениях:
 .
.
По формуле (19) для X[3×1] получили:
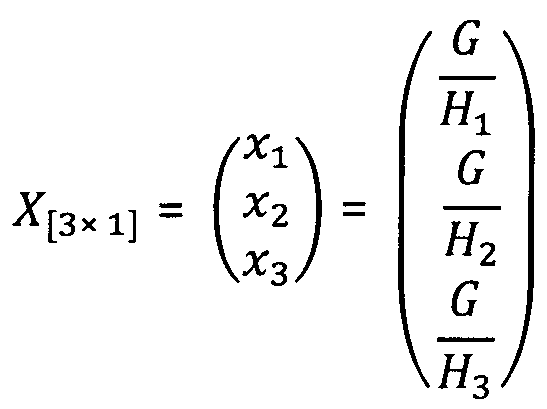 ,
,
или в числовых значениях:
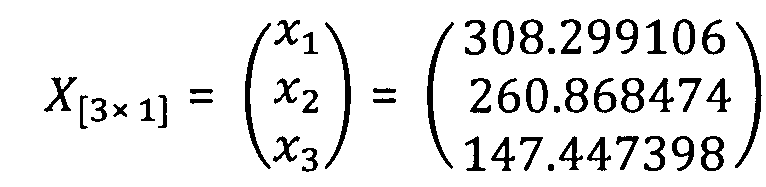 .
.
Согласно формуле (15), сформированная матрица A[3×4] синтезируемого фильтра в общем виде выглядит следующим образом:
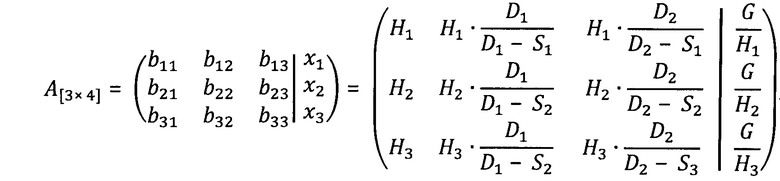 ,
,
или в числовых значениях:
 .
.
Блок 7 ФМСФ формирует и направляет сигналы с вычисленными значениями коэффициентов матрицы во второй ВБ 8, а также в третий ВБ 9.
При помощи второго ВБ 8 производится определение значений трех индуктивностей (L1, L2 и L3) путем решения матрицы A[3×4], например, с использованием алгоритма Гаусса-Жордана. Для этого при помощи второго ВБ 8 выполняется серия однотипных арифметических действий:
1. Умножаются все элементы первой строки кроме элемента b11, находящегося в первой строке первом столбце матрицы A[3×4], на коэффициент, равный:
 .
.
Вычитаются из значений элементов второй строки значения элементов первой строки после умножения, исключая вычитание элементов b21 и b11 второй и первой строк, находящихся в первом столбце. Результат вычитания записывается во вторую строку, первая же строка остается без изменений. При этом элементу второй строки первого столбца b21 присваивается значение, равное нулю. Таким образом, A[3×4] преобразуется в 
 .
.
2. Умножаются все элементы первой строки матрицы A(1) [3×4] кроме
элемента 

Вычитаются из значений элементов третьей строки 




 .
.
3. Умножаются все ненулевые элементы второй строки 


 .
.
Вычитаются из значений элементов третьей строки значения элементов второй строки после умножения, исключая вычитание элементов 




 .
.
4. Умножаются все ненулевые элементы третьей строки 



Вычитаются из значений элементов второй строки значения элементов третьей строки после умножения, исключая вычитание элементов 




 .
.
5. Умножаются все ненулевые элементы третьей строки 


 .
.
Вычитаются из значений элементов первой строки значения элементов третьей строки после умножения, исключая вычитание элементов 




 .
.
6. Умножаются все ненулевые элементы второй строки 


 .
.
Вычитаются из значений элементов первой строки значения элементов второй строки после умножения, исключая вычитание элементов 




 .
.
7. Делятся последовательно значения элементов последнего (четвертого) столбца матрицы 














Согласно формуле (25), образуется матрица 
 , в которой в соответствии с формулой (26):
, в которой в соответствии с формулой (26):
 ,
,
а в соответствии с формулой (27):
 .
.
По формуле (28) для k=[1…3] получаем:



Второй ВБ 8 формирует и направляет сигналы со значениями трех индуктивностей (L1, L2 и L3) в третий ВБ 9, а также в блок 10 ВВД.
Третий ВБ 9 по сигналам, поступающим в него из блока 7 ФМСФ и второго ВБ 8, вычисляет две неизвестные емкости (C2 и C3) двух параллельных индуктивно-емкостных колебательных контуров согласно формуле (29):
 ,
,
 .
.
Третий ВБ 9 формирует и направляет сигналы со значениями емкостей в блок 10 ВВД.
Таким образом, для синтезируемого трехчастотного фильтра имеем:
L1=46.55 [мГн], L2=2.76 [мГн], L3=15.89 [мГн],
C1=0.938 [мкФ], C2=25.497 [мкФ], C3=1.968 [мкФ].
Блок 10 ВВД производит вывод данных, то есть формирует и направляет информационные сигналы об определенных структуре, параметрах элементов фильтра в АРМ 11 для мониторинга и визуализации синтезируемого фильтра, а также в БУ 12, где могут формироваться сигналы управления блоком 1 ФРФ, в котором содержаться наборы дискретных индуктивностей, емкостей, и управляемые коммутирующие устройства. При этом блок 1 ФРФ (см. фиг. 1) обеспечивает формирование силовой электрической схемы фильтра, структура и параметры элементов которого в точности совпадают со структурой и параметрами элементов (см. фиг. 5), которые были определены. Кроме этого информационные сигналы, содержащиеся в блоке 10 ВВД и характеризующие измеряемые в блоке 4 ИАС величины, могут направляться в АРМ 11 для мониторинга измеряемых величин, а блок 1 ФРФ может направлять сигналы, характеризующие состояние своей работы в блок 10 ВВД, который направляет эти сигналы в АРМ 11 для контроля, управления и визуализации.
Приведем пример выполнения блоков устройства для реализации способа.
Блок 1 ФРФ может содержать индуктивные реакторы различной мощности типа ФРОС (50/10…500/6) ОАО «Электрозавод», конденсаторы для силовых фильтров серии КЭКФ ОАО «СКЗ»КВАР», резисторы типа РЗ «НПП «Болид» или демпферные резисторы РД 100/15, оптические датчики тока и напряжения фирм NxtPhase, Powersense, устройства защиты от перенапряжений на базе ограничителей перенапряжений (ОПН) серии П-3…П-220 или серии МОПН ЗАО «Завод энергозащитных устройств», устройства приема и передачи данных на базе приемников оптических сигналов серий VS5791,VS5792 и передатчиков оптических сигналов серии 1550NM фирмы Volius, аналого-цифровые преобразователи (АЦП) AD7609 и цифроаналоговые преобразователи (ЦАП) AD1953 фирмы Analog Devices, управляемые коммутирующие устройства, в качестве которых могут быть использованы управляемые контакторы серии НСА фирмы Hundai, силовые полупроводниковые модули, состоящие из оптотиристоров типа ТО232-25…ТО244-80 ОАО «Электровыпрямитель» или IGBT фирмы Infineon, устройства управления полупроводниковыми модулями на базе драйверов фирм Mitsubishi или CT-Concept. В качестве датчиков тока ДТ 2 и напряжения ДТ 3 могут быть использованы оптические датчики тока и напряжения фирм Optisense, ABB. Блок 4 ИАС может содержать приемники оптических сигналов серии VS5791 или VS5792, передатчики оптических сигналов серии 1550NM фирмы Volius, АЦП AD7609 фирмы Analog Devices, ПЛИС серии Stratix 10 фирмы Altera, прецизионные измерители и анализаторы качества электроэнергии фирм: Fluke, Circutor, Satec. Каждый из блоков: первый ВБ 5, блок 6 ОССФ, блок 7 ФМСФ, второй ВБ 8, третий ВБ 9 могут содержать приемники оптических сигналов серий VS5791,VS5792, передатчики оптических сигналов серии 1550NM фирмы Volius, ПЛИС серии Stratix 10 фирмы Altera. Блок 10 ВВД может состоять из серверов серии Storm 4000 фирмы Depo или промышленных серверов Advantix, устройств АЦП серии AD7609, ЦАП серии AD1953 фирмы Analog Devices, приемников оптических сигналов серий VS5791,VS5792, передатчиков оптических сигналов серии 1550NM фирмы Volius. В качестве АРМ 11 могут быть использованы промышленные ноутбуки серии Toughbook фирмы Panasonic или рабочие станции серии WS фирмы IEI Technology. БУ 12 может содержать приемники оптических сигналов серий VS5791,VS5792, передатчики оптических сигналов серии 1550NM фирмы Volius, устройства АЦП серии AD7609, ЦАП серии AD1953 фирмы Analog Devices, ПЛИС серии Stratix 10 фирмы Altera.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ПАРАМЕТРИЧЕСКОЙ СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ ПЕРЕМЕННОГО ТОКА | 2010 |
|
RU2410815C1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ ТОКА | 2010 |
|
RU2427023C1 |
| УЗКОПОЛОСНЫЙ ФИЛЬТР | 2009 |
|
RU2414024C2 |
| УСТРОЙСТВО КОМПЕНСАЦИИ ИСКАЖЕНИЙ ТОКА И РЕАКТИВНОЙ МОЩНОСТИ | 2009 |
|
RU2393609C1 |
| ФИЛЬТР ГАРМОНИК КОРОТКОВОЛНОВОГО ПЕРЕДАТЧИКА | 2016 |
|
RU2656695C2 |
| СПОСОБ ИЗМЕРЕНИЯ ДИНАМИЧЕСКОГО ДИАПАЗОНА РАДИОПРИЕМНИКА ПО ИНТЕРМОДУЛЯЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2472166C1 |
| Коммутационная панель для устройства ввода информации | 1989 |
|
SU1667042A1 |
| УСТРОЙСТВО СТАБИЛИЗАЦИИ НАПРЯЖЕНИЯ | 2009 |
|
RU2392727C1 |
| ПОЛОСНО-ПРОПУСКАЮЩИЙ ФИЛЬТР | 2013 |
|
RU2544769C2 |
| ЕМКОСТНЫЙ ДАТЧИК ПРИКОСНОВЕНИЯ, ИМЕЮЩИЙ КОЛЕБАТЕЛЬНЫЕ СИГНАЛЫ ПЕРЕДАЧИ С КОДОВЫМ РАЗДЕЛЕНИЕМ И ВРЕМЕННЫМ РАЗДЕЛЕНИЕМ | 2011 |
|
RU2574418C2 |
Изобретение относится к области электротехники и может использоваться для синтеза частотных фильтров, обеспечивающих минимизацию искажений тока и напряжения в системах генерации, преобразования и распределения электрической энергии. Предлагаемый способ может применяться в синтезаторах фильтров, а также в регуляторах многочастотных адаптивных устройств фильтрации спектра, структура и параметры которых определяются в реальном масштабе времени на основании измерений. Техническим результатом изобретения является расширение спектров частот фильтрации синтезируемых частотных фильтров, повышение точности и вычислительной эффективности синтеза частотных фильтров, а также возможность использования способа при синтезе частотных фильтров с целью реализации адаптивных устройств фильтрации спектра. Технический результат достигается тем, что при соблюдении определенных условий задают путем измерений основную частоту, а также напряжение и реактивную мощность фильтра на основной частоте, задают путем измерений любое требуемое количество n частот пропускания фильтра (1≤n<∞), определяют (n-1) частот задерживания фильтра, определяют необходимую структуру фильтра, которая состоит из n колебательных контуров, первый из которых последовательный, а остальные (n-1) параллельные, затем вычисляют значение емкости последовательного колебательного контура, формируют матрицу синтезируемого фильтра, определяют индуктивности фильтра путем решения матрицы синтезируемого фильтра методом Гаусса-Жордана или другими численными методами, далее вычисляют емкости параллельных колебательных контуров фильтра, после чего производят вывод данных о структуре и параметрах элементов, а также о заданных и измеренных величинах, с целью физической реализации и мониторинга синтезируемых фильтров. При этом способ позволяет с высокой точностью и вычислительной эффективностью в реальном масштабе времени синтезировать частотные фильтры, которые обеспечат фильтрацию любых n частот спектров тока и напряжения в системах генерации, преобразования и распределения электрической энергии. 8 ил.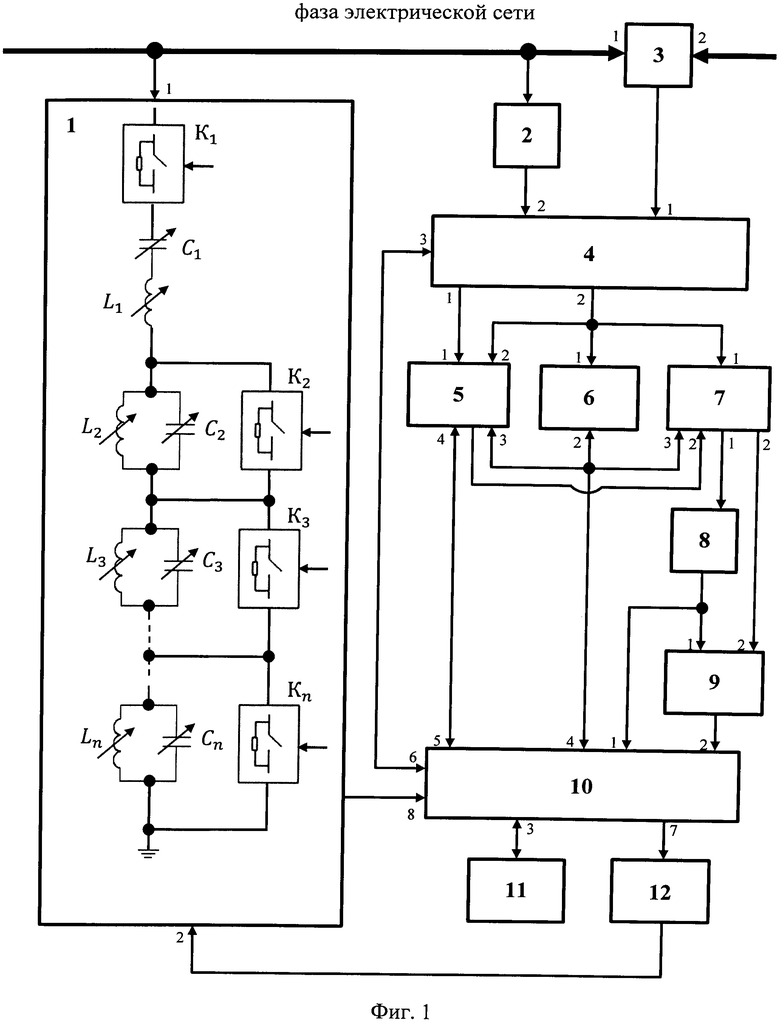
Способ синтеза частотных фильтров для систем генерации, преобразования и распределения электрической энергии, в котором задают основную частоту f0, напряжение Uф и реактивную мощность Qф фильтра на частоте f0, задают две или три частоты fs пропускания фильтра, задают одну или две частоты fp задерживания фильтра, определяют емкость C1 последовательного индуктивно-емкостного колебательного контура двух- или трехчастотного фильтра, определяют индуктивности двух- или трехчастотного фильтра, определяют емкости параллельных индуктивно-емкостных колебательных контуров двух- или трехчастотного фильтра, отличающийся тем, что задание частоты f0, напряжения Uф и реактивной мощности Qф фильтра на частоте f0 осуществляют путем измерений, при этом f0, Uф и Qф проверяют на выполнение условий:
0≤f0<∞,
0<Uф<∞,
0<Qф<∞,
до тех пор, пока условия не будут выполнены, причем если величина f0=0, то и Uф и Qф не используют при синтезе фильтра, затем задают частоты fs пропускания фильтра путем измерения, при этом количество частот пропускания равно n, где 1≤n<∞ (n - целое число), а из n частот пропускания (fs1…fsn) формируют последовательность частот в порядке возрастания их значений согласно условиям:
f0<fsi<fs(i+1)< ∞, при 2≤n<∞,
и
f0<fsn<∞, при n=1,
где i=1… (n-1) - ряд натуральных чисел (порядковый номер), fsi - значение i-й частоты пропускания, fsn - значение n-й частоты пропускания, после этого определяют частоты fp задерживания фильтра, при этом количество частот задерживания равно (n-1), причем частоты задерживания (fp1…fp(n-1)) определяют либо путем формирования последовательности частот в порядке возрастания их значений согласно условию:
fsi<fpi<fs(i+1), при 2≤n<∞,
либо путем вычисления их значений по формуле:
 , при 2≤n<∞,
, при 2≤n<∞,
где fpi - значение i-й частоты задерживания, далее определяют структуру фильтра, при этом определяемая структура фильтра будет содержать n последовательно соединенных индуктивно-емкостных колебательных контуров, первый из которых является последовательным индуктивно-емкостным колебательным контуром, а остальные [n-1] колебательных контуров являются параллельными индуктивно-емкостными колебательными контурами, после определения структуры фильтра при 0<f0<00 вычисляют значение емкости C1 по формуле:
 ,
,
где
 ,
,
 ,
,
Δ=2·π,
а при f0=0 значение емкости C1 задают таким образом, чтобы выполнялось условие:
0<C1<∞,
далее формируют матрицу A[n×(n+1)] синтезируемого фильтра, которая представляет собой матрицу размерностью [n×(n+1)]:
 ,
,
состоящую из квадратной матрицы B[n×n] размерностью [n×n]:
 ,
,
с добавлением к ней вектор-столбца X[n×1] размерностью [n×1]:
 ,
,
где k=1…n и m=1…n - натуральные ряды чисел (индексы элементов bkm и xk), при этом значения элементов матрицы B[n×n] и вектор-столбца X[n×1], которые являются также коэффициентами матрицы A[n×(n+1)], определяют по формулам:
 ,
,
где
Sk=(Hk)2,
D[m-1]=(P(m-1))2 (для m=2…·n),
P[m-1]=Δ·fpi ((m-1)=i,m=2…n),
 ,
,
после формирования матрицы синтезируемого фильтра определяют n индуктивностей Lk, входящих в структуру фильтра, путем решения матрицы A[n×(n+1)] с использованием алгоритма Гаусса-Жордана или других численных методов, затем для k=2…n вычисляют [n-1] емкостей C1 параллельных индуктивно-емкостных колебательных контуров фильтра по формуле:
 , (k=2…n и m=k),
, (k=2…n и m=k),
после чего производят вывод данных об определенных структуре и параметрах элементов фильтра, а также о заданных и измеренных величинах с целью физической реализации фильтров, а также с целью мониторинга синтезируемых фильтров.
| СПОСОБ ЭНЕРГОСБЕРЕЖЕНИЯ | 2011 |
|
RU2480883C2 |
| СПОСОБ СНИЖЕНИЯ УРОВНЯ ВЫСШИХ ГАРМОНИК | 2009 |
|
RU2416853C1 |
| CN102044877A, 04.05.2011 | |||

