Изобретение относится к техническим средствам для подъема жидкости из скважин и может быть использовано в нефтедобывающей промышленности для добычи нефти скважинными штанговыми насосами.
Известен привод скважинного штангового насоса (патент RU №2200876, МПК F04B 47/02, опубл. 20.03.2003, бюл. №8), содержащий установленную на основании раму и размещенные на ней двигатель, механизм преобразования вращательного движения в возвратно-поступательное, включающий ведущий шкив и криволинейный направляющий элемент с постоянным радиусом кривизны, охваченный гибким непрерывным звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих и связанным через гибкое звено с колонной штанг, при этом противовес выполнен сборным, состоящим из основного противовеса, нормализующего работу привода насоса, снабженного штангами минимального сечения и спущенного на минимальную глубину скважины, и дополнительных противовесов, выполненных с возможностью размещения их массы симметрично относительно оси симметрии плоскости гибкого непрерывного звена на основном противовесе, при этом суммарный центр тяжести расположен в непосредственной близости от этой плоскости, а гибкое звено, связывающее противовес с колонной штанг, размещено с образованием четного числа параллельных ветвей, узлы соединения ветвей гибкого звена с противовесом размещены попарно симметрично относительно оси симметрии гибкого звена за пределами его контура, при этом узлы соединения гибкого звена с противовесом и узлом подвески штанг выполнены с обеспечением одинакового натяжения всех ветвей гибкого звена, а рама снабжена колесами и дополнительным приводом и выполнена с возможностью фиксации относительно основания в любых положениях, а колеса установлены с возможностью взаимодействия с направляющими, и дополнительную раму, соединенную с основной рамой с возможностью перемещения в направлении оси симметрии контура гибкого непрерывного звена, проходящей через ведущий и криволинейный направляющий элемент преобразующего механизма, причем соединение выполнено с возможностью фиксации дополнительной рамы относительно основной в любом положении, при этом гибкое звено, связывающее противовес с колонной штанг, выполнено замкнутым.
Наиболее близким по технической сущности является привод скважинного штангового насоса (патент US №4916959, Int. Cl. 4 В66В 5/26, опубл. 17.04.1990), содержащий установленные на основании на единой раме с корпусом двигатель, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомые шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний (ведомый) шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена.
Однако известные устройства имеют следующие недостатки:
- во-первых, натяжение непрерывного гибкого звена регулируется периодически с участием обслуживающего персонала, что приводит к образованию провиса (ослабления) гибкого звена между регулировками, из-за чего возникают динамические нагрузки в преобразующем механизме, сокращающие срок службы гибкого звена и всей установки или приводящие к более частому регулированию натяжения, что существенно повышает затраты на обслуживание;
- во-вторых, для оптимального натяжения гибкого звена обслуживающему персоналу необходимо определить величину натяжения с использованием специальных устройств и приборов, что приводит к дополнительным вложениям;
- в-третьих, для регулирования натяжения гибкого звена обслуживающим персоналом необходимо остановить привод, что приводит к потерям добываемой продукции, а также затратам рабочего времени обслуживающего персонала;
- в-четвертых, регулирование обслуживающим персоналом натяжения гибкого звена происходит при расположении противовеса на технологических упорах с возможностью последующего подъема противовеса для снятия с упоров, что приводит к чрезмерному натяжению одного участка гибкого звена при недостаточном натяжении другого и является причиной его преждевременного выхода из строя.
Техническими задачами изобретения являются увеличение срока службы гибкого звена и привода в целом, а также уменьшение динамических нагрузок на скважинное оборудование установки скважинного штангового насоса, сокращение трудоемкости и затрат на обслуживание привода за счет исключения работ по регулированию натяжения гибкого звена преобразующего механизма обслуживающим персоналом и автоматического поддержания его постоянного натяжения.
Поставленные технические задачи решаются приводом скважинного штангового насоса, содержащим установленные на основании на раме с корпусом двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний (ведомый) шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса и соединенного с толкателем.
Новым является то, что толкатель натяжного механизма выполнен в виде гидравлической пары цилиндр-поршень, подвижная часть которого подпирает корпус верхнего шкива, натяжной механизм выполнен в виде гидравлического плунжерного или поршневого насоса, сообщенного через нагнетательный клапан с полостью цилиндра толкателя, который сообщен через регулирующее устройство с питательной емкостью, сообщенной через всасывающий клапан с насосом, подвижная часть которого соединена с рычагом с возможностью поворота относительно корпуса привода и взаимодействия через гибкую связь с противовесом при его перемещении вверх и/или вниз, причем место крепления гибкой связи к рычагу должно быть равноудалено от места соединения гибкой связи с противовесом в крайних его положениях, а длина гибкой связи должна быть равна разности половины длины хода противовеса и половины длины хода рычага, для возвратно-поступательного перемещения подвижной части насоса и соответствующего перемещения вверх подвижной части толкателя при ослаблении натяжения непрерывного гибкого звена ниже выбранной величины усилия натяжения.
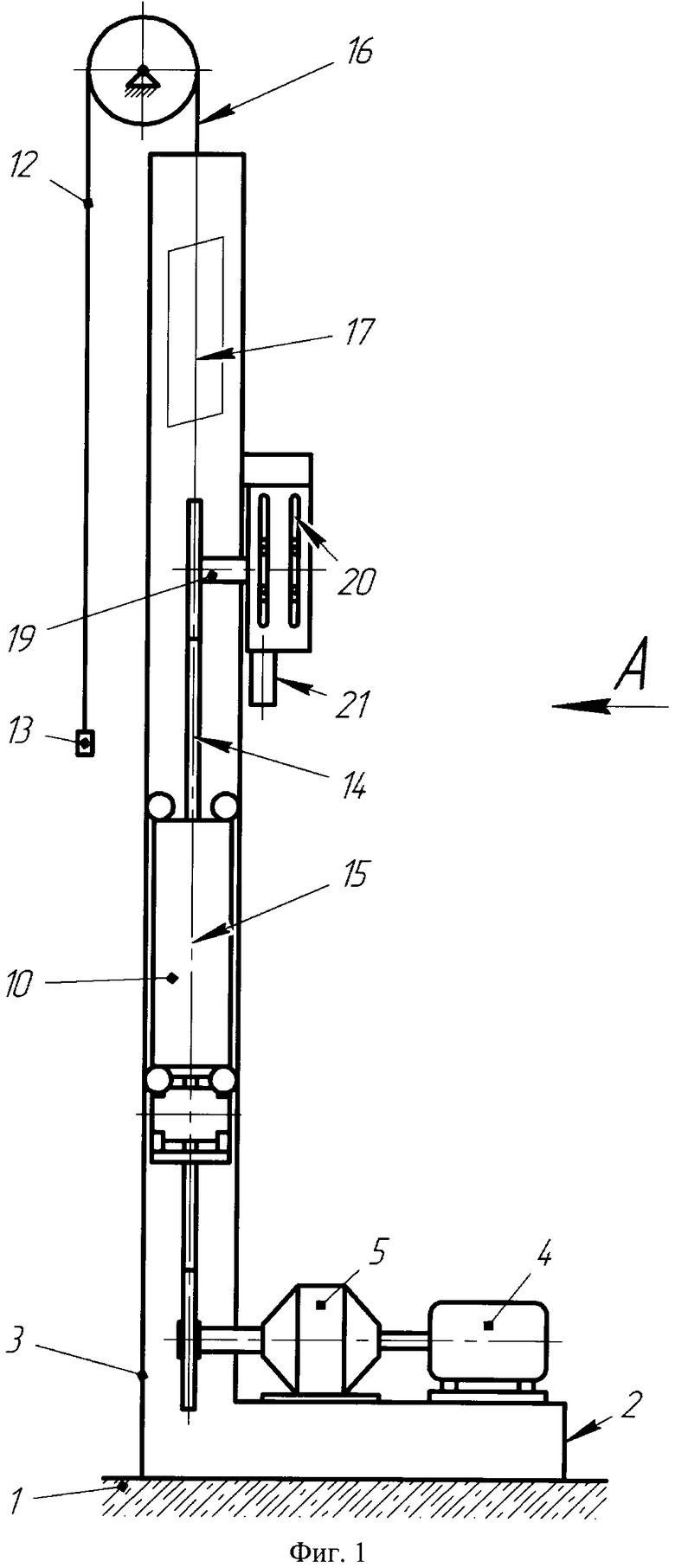
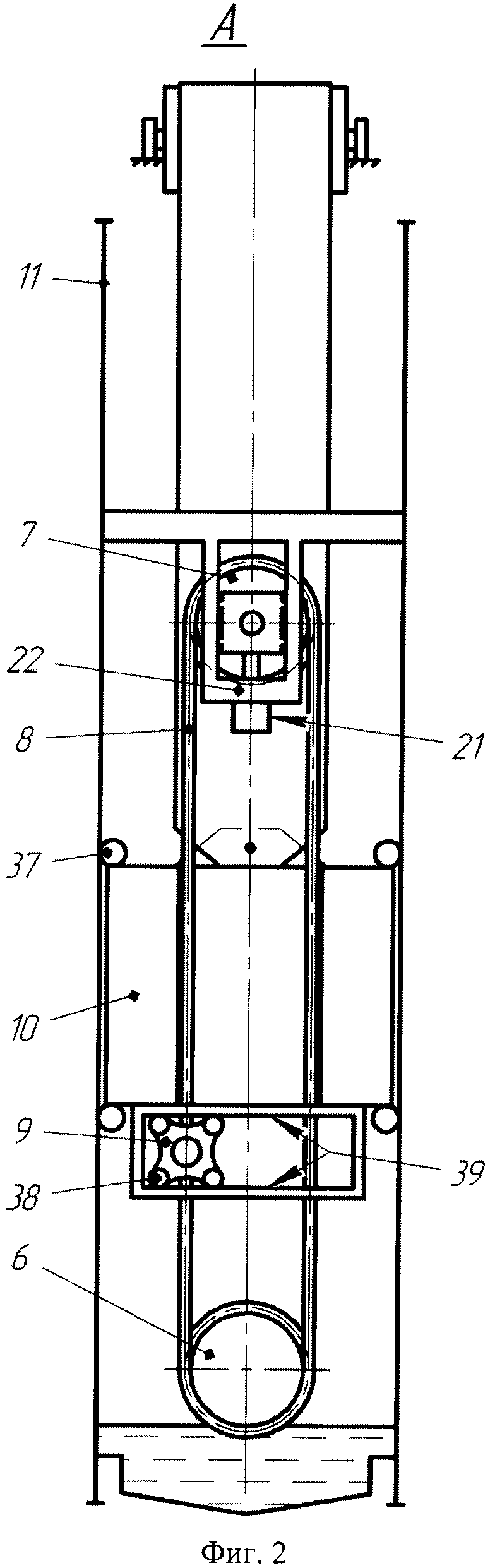
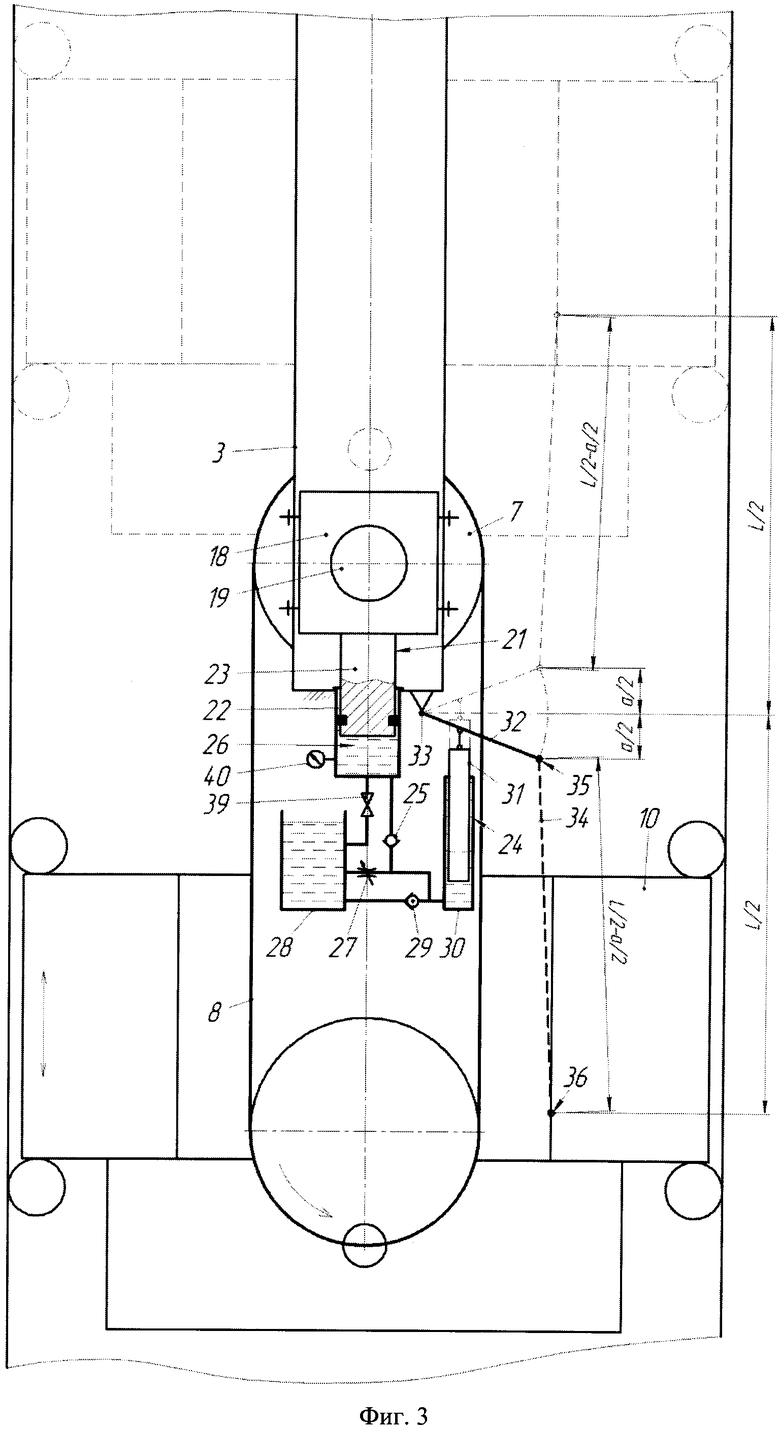
На фиг. 1 схематично изображен привод скважинного штангового насоса, вид сбоку; на фиг. 2 - то же, вид А по фиг. 1; на фиг. 3 - схема натяжного механизма привода.
Привод скважинного штангового насоса, содержащий установленные на основании 1 (фиг. 1) на раме 2 с корпусом 3 двигатель 4, редуктор 5, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий 6 (фиг. 2) и ведомый 7 шкивы, например звездочки или зубчатые шкивы или т.п., охваченные непрерывным гибким звеном 8, например цепью или зубчатым ремнем или т.п., связанным с кареткой 9, соединенной с противовесом 10, установленным в направляющих 11 корпуса 3 (фиг. 1) и связанным через гибкое звено 12, например, транспортерную ленту или канат, или т.п. с узлом подвески штанг 13, причем ось 14 преобразующего механизма, ось 15 противовеса 10 и ось 16 гибкого звена 12 находятся вблизи одной вертикальной плоскости 17, а верхний (ведомый) шкив 7 (фиг. 2) установлен в корпусе 3 (фиг. 1) с возможностью вращения и ограниченного перемещения вдоль оси 14 преобразующего механизма для регулирования натяжения непрерывного гибкого звена 8 (фиг. 3) при помощи натяжного механизма, состоящего из подвижного корпуса 18 с осью 19 шкива 7, установленного на продольных салазках 20 (фиг. 1) корпуса 3 и соединенного с толкателем 21 (фиг. 3). Толкатель 21 натяжного механизма выполнен в виде гидравлической пары цилиндр 22-поршень 23, подвижная часть которой подпирает корпус 18 верхнего шкива 7. Подвижной частью толкателя 21 может быть или цилиндр 22, или поршень 23. Натяжной механизм выполнен в виде гидравлического плунжерного или поршневого насоса 24, сообщенного через нагнетательный клапан 25 с полостью 26 цилиндра 22 толкателя 21, которая сообщена через регулирующее устройство 27, например регулирующий дроссель или штуцерную задвижку револьверного типа или другое устройство для регулирования давления, с питательной емкостью 28, сообщенной через всасывающий клапан 29 с насосом 24, подвижная часть, цилиндр 30 или плунжер (поршень) 31 которого соединена с рычагом 32 с возможностью поворота относительно корпуса 3 привода, например, через подшипниковую опору 33, жестко присоединенную к корпусу 3, или плавающую подшипниковую опору (не показана) при необходимости компенсации перекоса подвижной части насоса 24 при движении рычага 32, или другое поворотное устройство, и взаимодействия через гибкую связь 34, например канат, веревку и др., с противовесом 10 при его перемещении вверх и/или вниз, причем место крепления 35 гибкой связи 34 к рычагу 32 должно быть равноудалено от места соединения 36 гибкой связи 34 с противовесом 10 в крайних его положениях, а длина гибкой связи 34 должна быть равна разности половины длины хода противовеса 10 и половины длины хода рычага 32, т.е. L/2-a/2, где L - длина хода противовеса и а - длина хода рычага 32, для возвратно-поступательного перемещения подвижной части, или цилиндра 30, или плунжера (поршня) 31, насоса 24 и соответствующего перемещения вверх подвижной части, или цилиндра 22, или поршня 23, толкателя 21 при ослаблении натяжения непрерывного гибкого звена 8 ниже выбранной величины усилия натяжения. Рычаг 32 может быть с постоянной или регулируемой длиной свободного конца, а также с фиксированным или регулируемым положением места крепления 35 гибкой связи 34 на рычаге 32, для обеспечения возможности регулирования подачи насоса 24. Все элементы натяжного механизма могут быть скомпонованы по отдельности, как изображено на фиг. 3, или в одном корпусе, или толкатель 21, насос 24 с регулирующим устройством 27 и обратными клапанами 25 и 29 в одном корпусе с отдельно расположенной емкостью 28, соединенной с толкателем 21 и насосом 24 трубопроводами, или другим образом.
Насос 24 может быть расположен вертикально, как на фиг. 3, горизонтально или под другим углом (не показаны) с расположением рычага 32 под углом к продольной оси насоса 24 и к направляющей 11 (фиг. 2) корпуса 3 (фиг. 3), по которой движется противовес 10.
Работа устройства осуществляется следующим образом.
Возле устья скважины устанавливается основание 1 (фиг. 1) привода. Основание 1 может быть в виде фундаментной плиты в случае стационарного размещения привода или саней (не показаны) - в случае передвижного (мобильного) варианта привода. На основании 1 монтируется привод в сборе. Колонна штанг установки скважинного штангового насоса (не показана) подвешивается на узел подвески штанг 13 привода.
После включения двигателя 4 (фиг. 1) вращение через редуктор 5 и ведущий шкив 6 (фиг. 2) преобразующего механизма передается на непрерывное замкнутое гибкое звено 8. Допустим, гибкое звено 8 двигается против часовой стрелки. Связанная с гибким звеном 8 каретка 9, соединенная с противовесом 10, оснащенным колесами 37, движется вниз по направляющим 11 корпуса 3 (фиг. 1), а связанный с противовесом 10 (фиг. 2) через гибкое звено 12 (фиг. 1) узел подвески штанг 13 поднимается вверх, соответственно поднимая колонну штанг с плунжером скважинного штангового насоса (не показаны). При достижении кареткой 9 (фиг. 2) преобразующего механизма крайнего нижнего положения происходит переход с хода вниз противовеса 10 на ход вверх за счет перехода каретки 9, оснащенной колесами 38, по направляющим 39 с одной ветви гибкого звена 8 на другую - происходит преобразование вращательного движения ведущего шкива 6 в возвратно-поступательное противовеса 10. Соответственно при этом происходит изменение направления движения узла подвески штанг 13 (фиг. 1) с хода вверх на ход вниз. Тоже самое происходит при переходе каретки 9 (фиг. 2) через крайнее верхнее положение - только с хода вниз на ход вверх узла подвески штанг 13 (фиг. 1).
Для снижения нагрузок на элементы преобразующего механизма, в частности на гибкое звено 8 (фиг. 2), оси 14 (фиг. 1) преобразующего механизма, 15 противовеса 10 и 16 гибкого звена 12 расположены вблизи одной вертикальной плоскости 17.
Рама 2 (фиг. 1) может быть жестко присоединена к корпусу 3 или может регулироваться (не показано) относительно корпуса 3 в зависимости от требований технологичности сборки привода.
Во время эксплуатации привода гибкое звено 8 (фиг. 2) под действием циклической нагрузки и вследствие износа будет удлиняться, поэтому в конструкции привода для исключения влияния человеческого фактора и поддержания постоянного натяжения гибкого звена 8 предусмотрен механизм автоматического натяжения гибкого звена 8 путем перемещения верхнего (ведомого) шкива 7 вдоль оси 14 (фиг. 1) преобразующего механизма с помощью натяжного механизма по мере ослабления гибкого звена 8 (фиг. 2) на величину ослабления.
Принцип работы натяжного механизма заключается в следующем. Когда каретка 9 (фиг. 2) переходит через крайнее нижнее положение, происходит натяжение всего гибкого звена 8, т.е. гибкое звено 8 полностью равномерно нагружается тяговым усилием от нижнего (ведущего) шкива 6. По мере хода каретки 9 с противовесом 10 вверх нагруженный участок гибкого звена 8 уменьшается от максимальной, полной длины замкнутого гибкого звена 8, после перехода каретки 9 через крайнее нижнее положение, до минимальной длины при подходе каретки 9 к крайнему нижнему положению после хода вниз, следующем за ходом вверх каретки 9 с противовесом 10. Ненагруженный участок гибкого звена 8 расслаблен. Во время нахождения каретки 9 с противовесом 10 на прямолинейном участке хода вниз происходит ослабление большего участка гибкого звена 8. Натяжение в этом участке будет более эффективным, чем в остальных положениях каретки 9 с противовесом 10, так как на верхний шкив 7 действует разная нагрузка при ходе вверх и ходе вниз противовеса 10, отличающаяся величиной силы, действующей от веса противовеса 10, т.е. при ходе вниз на узел верхнего шкива 7 нагрузка от веса противовеса 10 не действует. Для примера, на приводе скважинного штангового насоса ПЦ 60-3-0,5/2,5 производства Бугульминского механического завода при ходе вверх противовеса привода нагрузка на натяжной механизм будет порядка 76500 Н, а при ходе вниз - 3950 Н. Натяжной механизм работает именно в этом участке хода вниз противовеса 10. При срабатывании в других положениях противовеса 10 потребовалось бы существенно большее усилие на толкателе 21 натяжного механизма, что привело бы к чрезмерному натяжению гибкого звена 8 на прямолинейном участке хода вниз противовеса 10.
Натяжной механизм позволяет регулировать усилие натяжения гибкого звена 8 в широких пределах, поэтому для его срабатывания именно на прямолинейном участке хода вниз противовеса 10 (фиг. 3) требуется предварительная регулировка усилия натяжения гибкого звена 8 толкателем 21 натяжного механизма. Регулировка производится на заводе-изготовителе при сборке привода или на месте эксплуатации после замены гибкого звена 8 или шкивов 6 и 7, и может, при необходимости, корректироваться. Усилие на подвижной части 23 толкателя 21 должно быть достаточно для поднятия суммарного веса подвижного корпуса 18 с осью 19 верхнего шкива 7, расслабленной части гибкого звена 8, а также для преодоления потерь на трение в узлах натяжного механизма и в салазках 20 (фиг. 1). Для приведенного в качестве примера привода ПЦ 60-3-0,5/2,5 суммарный вес составляет порядка 3950 Н. Регулировка натяжного механизма производится устройством 27 (фиг. 3) за счет регулирования объема сбрасываемой в питательную емкость 28 жидкости. Предварительная регулировка натяжного механизма производится однократно и этой регулировки достаточно для работы натяжного механизма в течение всего срока службы гибкого звена 8.
Процесс регулировки происходит следующим образом. При сборке привода натяжку гибкого звена 8 производят при закрытом регулировочном устройстве 27 вручную с помощью рычага 32 или с помощью отдельного насоса (не показан), приводимого от обслуживающей машины, присоединенного к запорному устройству 40, например задвижке, крану или другому запорному устройству, которым можно оснастить натяжной механизм, или другим способом до выбранной величины усилия натяжения при расположении противовеса 10 на специальных технологических упорах (не показаны) на прямолинейном участке хода вниз. Величина усилия натяжения может быть выбрана визуально сравнением натяжения ветвей гибкого звена 8 или инструментально с помощью манометра 41, которым можно оснастить натяжной механизм, сообщающегося с полостью 26 цилиндра 22 толкателя 24 натяжного механизма, или датчиков усилия (не показаны), установленных в гибком звене 8, или под подвижным корпусом 18, или в другом месте преобразующего механизма привода, или других приборов или инструментов. Устройство 27 регулируют в экспериментально найденное положение, соответствующее усилию на толкателе 21, достаточному для натяжения гибкого звена 8, отмеченное на корпусе устройства 27, например, краской, риской или другим способом. После подъема противовеса 10 ручным приводом (не показан) для снятия технологических упоров и закрытия запорного устройства 40 при его наличии, включают привод в работу.
В качестве примера конкретного выполнения опишем работу натяжного механизма, изображенного на фиг. 3. Цикл нагнетания насоса 24 производится за счет взаимодействия противовеса 10 во время хода вниз через натянутое гибкое звено 34 на свободный конец рычага 32. Рычаг 32 перемещается вниз, увлекая за собой подвижную часть насоса 24, до момента достижения противовесом 10 крайнего нижнего положения, что соответствует окончанию цикла нагнетания насоса 24. Один двойной ход противовеса 10 соответствует одному циклу нагнетания насоса 24. Жидкость, нагнетаемая насосом 24, поступает в линию нагнетания и при ослаблении натяжения гибкого звена 8, что происходит постоянно на незначительную величину, соответственно снижении давления в толкателе 21, поступает в полость 26 толкателя 24 через обратный клапан 25 до достижения необходимого давления, соответствующего необходимому усилию натяжения гибкого звена 8, и через регулировочное устройство 27 в питательную емкость 28. Объем сбрасываемой жидкости зависит от параметров насоса 24, зазора в регулировочном устройстве 27 и величины снижения давления в толкателе 21. Параметры (диаметр плунжера 31 и ход подвижной части) насоса 24 должны быть подобраны так, чтобы как можно меньше жидкости сбрасывалось в емкость 28 с целью повышения КПД натяжного механизма, уменьшения нагрева жидкости и др. За циклом нагнетания следует цикл всасывания, который производится аналогично циклу нагнетания только при обратном ходе вверх противовеса 10 до момента достижения противовеса 10 крайнего верхнего положения, что соответствует окончанию цикла всасывания насоса 24. При этом жидкость из питательной емкости 28 через обратный клапан 29 поступает в насос 24. Далее циклы повторяются. За счет постоянной работы насоса 24 обеспечивается постоянство давления в толкателе 21 и соответственно постоянство натяжения гибкого звена 8. При нахождении каретки 9 с противовесом 10 в остальных участках гибкое звено 8 натягиваться не будет - усилия натяжения толкателя 21 будет недостаточно.
Натяжной механизм работает только на натяжение гибкого звена 8. При ходе вверх противовеса 10 нагрузка на натяжной механизм, как было сказано выше, существенно возрастает, соответственно возрастает давление в полости 26 толкателя 21, поэтому для исключения обратного хода подвижной части толкателя 21 под действием веса противовеса 10, как следствие ослабления гибкого звена 8, возможного при вибрациях в приводе, в конструкции натяжного механизма предусмотрен обратный клапан 25, причем толкатель 21, обратный клапан 25 и регулировочное устройство 27 рассчитаны на дополнительное давление от веса противовеса 10.
Усилие натяжения толкателя 21 (фиг. 2) может быть скорректировано с целью максимального приближения к выбранной величине усилия натяжения гибкого звена 8. Возможны несколько равнозначных методик определения усилия натяжения гибкого звена 8. Например, проверкой величины провиса гибкого звена 8 при остановленном приводе в положении каретки 9 с противовесом 10 на прямолинейном участке хода вниз или по показаниям съемного или стационарного манометра 40 (фиг. 3), которым может быть оснащен натяжной механизм, сообщающегося с полостью цилиндра 22 толкателя 21, на работающем приводе или другими методами. В качестве примера представим методику корректировки с помощью манометра 40. После начала работы привода с предлагаемым натяжным механизмом показания манометра 40 должны будут изменяться в диапазоне 0,5-9,7 МПа для натяжного механизма с диаметром поршня толкателя, равным 100 мм. При корректировке принципиально нижнее значение манометра 40, показывающее то давление в толкателе 21, которое достаточно для работы натяжного механизма. Если нижнее значение показания манометра 40 будет ниже значения 0,5 МПа, то усилия натяжения толкателя 21 недостаточно, и гибкое звено 8 не натянуто, если больше, то усилие натяжения толкателя 21 больше требуемого - гибкое звено 8 перетянуто. Усилие натяжения корректируется вручную регулировкой устройства 27. Также натяжной механизм может автоматически поддерживать требуемое усилие натяжения гибкого звена 8 при оснащении последнего датчиками усилия (не показаны), по показаниям которых будет автоматически настраиваться регулировочное устройство 27, оснащенное собственным приводом (не показан), что актуально при резких и частых изменениях условий эксплуатации, например, температуры, давления и других параметров, влияющих на работу гидравлической системы натяжного механизма.
Салазки 20 позволяют корпусу 18 (фиг. 3) натяжного механизма перемещаться только вдоль оси 14 (фиг. 1) преобразующего механизма.
Ход подвижного корпуса 18 (фиг. 3) ограничен и выбирается исходя из необходимого и достаточного диапазона регулирования натяжения гибкого звена 8, определяемого на основании условий и опыта эксплуатации примененного в приводе гибкого звена 8. Предлагаемый натяжной механизм позволяет настроить ход подвижного корпуса 18 на весь срок службы гибкого звена 8. Например, в случае применения в качестве гибкого звена 8 цепи предел удлинения, соответственно и срок службы цепи, равен двум шагам, что для приведенного в качестве примера привода ПЦ 60-3-0,5/2,5 с цепью 2ПР-50,8-453,6 соответствует пределу удлинения 101,6 мм, после исчерпания которого необходимо произвести ремонт или замену цепи. Такому удлинению цепи соответствует ход подвижного корпуса 18 (фиг. 3) вдоль оси 14 (фиг. 1) преобразующего механизма, равный 50,8 мм при длине хода привода 3 м и делительном диаметре звездочек 6 и 7 (фиг. 2), равном 244,33 мм.
Предложенное техническое решение позволяет автоматически, без участия обслуживающего персонала и остановки привода, поддерживать непрерывное гибкое звено 8 преобразующего механизма привода в оптимальном состоянии - без провисания и перетяжки, поэтому сократятся трудоемкость и затраты на обслуживание привода.
Если гибкое звено 8 растянуто (в приводе без натяжного механизма), то в момент перехода каретки 9 через крайнее нижнее положение (ведущий шкив 6 вращается с постоянной скоростью) происходит натяжение расслабленного ненагруженного участка замкнутого гибкого звена 8 за счет вращения ведомого шкива 7 с осью 19 в корпусе 18, сопровождаемое замедлением каретки 9, двигающейся по инерции, и последующим ударом, приводящим к дополнительным ударным нагрузкам в работе привода и установки скважинного штангового насоса в целом, в разы превосходящим расчетные динамические нагрузки. Величина удара зависит от провиса гибкого звена 8 - чем больше провис, тем сильнее удар. Автоматическое поддержание постоянного натяжения гибкого звена 8 в предлагаемой конструкции позволит избежать лишних нагрузок, что увеличит срок службы гибкого звена 8 и привода в целом, а также уменьшит ударные нагрузки на скважинное оборудование установки скважинного штангового насоса.
Для снятия гибкого звена 8 со шкивов 6 и 7, например, с целью его замены или для замены шкивов 6 и/или 7, или для других целей, необходимо при остановленном приводе отключить натяжной механизм. Для этого натяжной механизм привода может быть оснащен запорным устройством 39, например задвижкой или краном, или другим запорным устройством, при открытии которого жидкость из полости 26 цилиндра 22 толкателя 21 перетечет в питательную емкость 28 или в емкость обслуживающей машины (не показана), или в другую герметичную емкость. При этом подвижная часть 23 толкателя 21, соответственно и подвижный корпус 18 привода с осью 19 и шкивом 7, опустятся вниз, ослабив гибкое звено 8.
Предлагаемое устройство аналогично работает при расположении натяжного механизма над верхним (ведомым) шкивом 7 (фиг. 2).
Благодаря использованию предлагаемого устройства увеличивается срок службы гибкого звена и привода в целом, а также уменьшаются динамические нагрузки на скважинное оборудование установки штангового скважинного насоса, сокращаются трудоемкость и затраты на обслуживание привода за счет исключения работ по регулированию натяжения гибкого звена преобразующего механизма обслуживающим персоналом и автоматического поддержания его постоянного натяжения.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560111C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2559962C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2547674C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2015 |
|
RU2578011C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2570541C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2016 |
|
RU2611126C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| Привод скважинного штангового насоса | 2024 |
|
RU2833741C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2517950C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2007 |
|
RU2350786C1 |
Изобретение относится к средствам для подъема жидкости из скважин и может быть использовано в нефтедобывающей промышленности для добычи нефти. Привод содержит двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом. Оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости. Верхний шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса, установленного на продольных салазках корпуса привода и соединенного с толкателем. Толкатель натяжного механизма выполнен в виде гидравлической пары цилиндр-поршень. Его подвижная часть подпирает корпус верхнего шкива. Натяжной механизм выполнен в виде плунжерного или поршневого насоса, сообщенного через нагнетательный клапан с полостью цилиндра толкателя, который сообщен через регулирующее устройство с питательной емкостью, сообщенной через всасывающий клапан с насосом, подвижная часть которого соединена с рычагом с возможностью поворота относительно корпуса привода и взаимодействия через гибкую связь с противовесом. Место крепления гибкой связи к рычагу равноудалено от места соединения гибкой связи с противовесом в крайних его положениях. Длина гибкой связи равна разности половины длины хода противовеса и половины длины хода рычага. Увеличивается срок службы гибкого звена и привода, а также уменьшаются динамические нагрузки на скважинное оборудование, сокращаются трудоемкость и затраты на обслуживание привода. 3 ил.
Привод скважинного штангового насоса, содержащий установленные на основании на раме с корпусом двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний ведомый шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса привода и соединенного с толкателем, отличающийся тем, что толкатель натяжного механизма выполнен в виде гидравлической пары цилиндр-поршень, подвижная часть которого подпирает корпус верхнего шкива, натяжной механизм выполнен в виде гидравлического плунжерного или поршневого насоса, сообщенного через нагнетательный клапан с полостью цилиндра толкателя, который сообщен через регулирующее устройство с питательной емкостью, сообщенной через всасывающий клапан с насосом, подвижная часть которого соединена с рычагом с возможностью поворота относительно корпуса привода и взаимодействия через гибкую связь с противовесом при его перемещении вверх и/или вниз, причем место крепления гибкой связи к рычагу должно быть равноудалено от места соединения гибкой связи с противовесом в крайних его положениях, а длина гибкой связи должна быть равна разности половины длины хода противовеса и половины длины хода рычага, для возвратно-поступательного перемещения подвижной части насоса и соответствующего перемещения вверх подвижной части толкателя при ослаблении натяжения непрерывного гибкого звена ниже выбранной величины усилия натяжения.
| US4916959A, 17.04.1990 | |||
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА (ВАРИАНТЫ) | 2001 |
|
RU2200876C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2005 |
|
RU2283969C1 |
| Привод скважинного штангового насоса | 1980 |
|
SU964233A1 |
| Способ обработки цинковой изгарины | 1929 |
|
SU18931A1 |
| US4665761A1, 19.05.1987 | |||

