Изобретение относится к техническим средствам для подъема жидкости из скважин и может быть использовано в нефтедобывающей промышленности для добычи нефти скважинными штанговыми насосами.
Известен привод скважинного штангового насоса (патент RU №2200876, МПК F04B 47/02, опубл. 20.03.2003, бюл. №8), содержащий установленную на основании раму и размещенные на ней двигатель, механизм преобразования вращательного движения в возвратно-поступательное, включающий ведущий шкив и криволинейный направляющий элемент с постоянным радиусом кривизны, охваченный гибким непрерывным звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих и связанным через гибкое звено с колонной штанг, при этом противовес выполнен сборным, состоящим из основного противовеса, нормализующего работу привода насоса, снабженного штангами минимального сечения и спущенного на минимальную глубину скважины, и дополнительных противовесов, выполненных с возможностью размещения их массы симметрично относительно оси симметрии плоскости гибкого непрерывного звена на основном противовесе, при этом суммарный центр тяжести расположен в непосредственной близости от этой плоскости, а гибкое звено, связывающее противовес с колонной штанг, размещено с образованием четного числа параллельных ветвей, узлы соединения ветвей гибкого звена с противовесом размещены попарно симметрично относительно оси симметрии гибкого звена за пределами его контура, при этом узлы соединения гибкого звена с противовесом и узлом подвески штанг выполнены с обеспечением одинакового натяжения всех ветвей гибкого звена, а рама снабжена колесами и дополнительным приводом и выполнена с возможностью фиксации относительно основания в любых положениях, а колеса установлены с возможностью взаимодействия с направляющими, и дополнительную раму, соединенную с основной рамой с возможностью перемещения в направлении оси симметрии контура гибкого непрерывного звена, проходящей через ведущий и криволинейный направляющий элемент преобразующего механизма, причем соединение выполнено с возможностью фиксации дополнительной рамы относительно основной в любом положении, при этом гибкое звено, связывающее противовес с колонной штанг, выполнено замкнутым.
Известен привод скважинного штангового насоса (патент US №4916959, МПК В66В 5/26, опубл. 17.04.1990), содержащий установленные на основании на единой раме с корпусом двигатель, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомые шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний (ведомый) шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена.
Однако устройства имеют следующие недостатки:
- натяжение непрерывного гибкого звена регулируется периодически с участием обслуживающего персонала, что приводит к образованию провиса (ослабления) гибкого звена между регулировками, из-за чего возникают динамические нагрузки в преобразующем механизме, сокращающие срок службы гибкого звена и всей установки или приводящие к более частому регулированию натяжения, что существенно повышает затраты на обслуживание;
- для оптимального натяжения гибкого звена обслуживающему персоналу необходимо определить величину натяжения с использованием специальных устройств и приборов, что приводит к дополнительным вложениям;
- для регулирования натяжения гибкого звена обслуживающим персоналом необходимо остановить привод, что приводит к потерям добываемой продукции, а также затратам рабочего времени обслуживающего персонала;
- регулирование обслуживающим персоналом натяжения гибкого звена происходит при расположении противовеса на технологических упорах с возможностью последующего подъема противовеса для снятия с упоров, что приводит к чрезмерному натяжению одного участка гибкого звена при недостаточном натяжении другого и является причиной его преждевременного выхода из строя.
Наиболее близким по технической сущности является привод скважинного штангового насоса (патент RU №2522729, МПК F04B 47/02, опубл. 20.07.2014, бюл. №20), содержащий установленные на основании на раме с корпусом двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний (ведомый) шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса и соединенного с толкателем, выполненным в виде винтовой пары, гайка которого жестко соединена с корпусом, и противоотворотного механизма, причем противоотворотный механизм выполнен в виде автоматического механизма, а винт винтовой пары снабжен барабаном с намотанным гибким звеном, конец которого через блок соединен с грузом, выполненным с возможностью вращения барабана для натяжения непрерывного гибкого звена винтовой парой при ослаблении и перемещении каретки с противовесом вниз.
Недостатками привода являются:
- необходимость периодической смазки обслуживающим персоналом винтовой пары, влияющей на работоспособность натяжного механизма, или применения смазочного устройства, исключающего обслуживание персоналом, что усложняет конструкцию натяжного механизма;
- ограниченная длина хода груза вниз, в вертикальной плоскости, влечет за собой необходимость производить периодическую намотку гибкого звена на барабан с остановкой привода, и потерями добываемой продукции, а также затратам рабочего времени обслуживающего персонала;
- груз, подвешенный на гибком звене при сильном ветре, раскачивается и есть вероятность ударов о привод, что может привести попадания груза в движущиеся части привода или обрыва груза.
Технической задачей изобретения является повышение надежности, долговечности и эффективности работы привода за счет постоянного автоматического натяжения гибкого звена без участия обслуживающего персонала.
Техническая задача решается приводом скважинного штангового насоса, содержащим установленные на основании раму с корпусом, двигатель, редуктор, механизм преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, оси преобразующего механизма, противовеса и гибкого звена, находящиеся вблизи одной вертикальной плоскости, при этом верхний ведомый шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, включающего подвижный корпус с осью шкива и храповой механизм.
Новым является то, что натяжной механизм состоит из двух клиновых домкратов с винтами правой и левой резьбы, соединенных с одной стороны противоулетной шпилькой, с другой стороны на них установлены зубчатые колеса, находящиеся в зацеплении между собой, а на оси винта с правой резьбой с глухими отверстиями расположен храповый механизм с жестко закрепленным фиксирующим устройством, предотвращающим движение вокруг своей оси болтом крепления, в движение винт приводит штанга храпового механизма с утяжелителем, который в свою очередь приводит в движение ведомый шкив, на котором жестко закреплен механизм переключения, позволяющий производить автоматическое натяжение непрерывного гибкого звена.
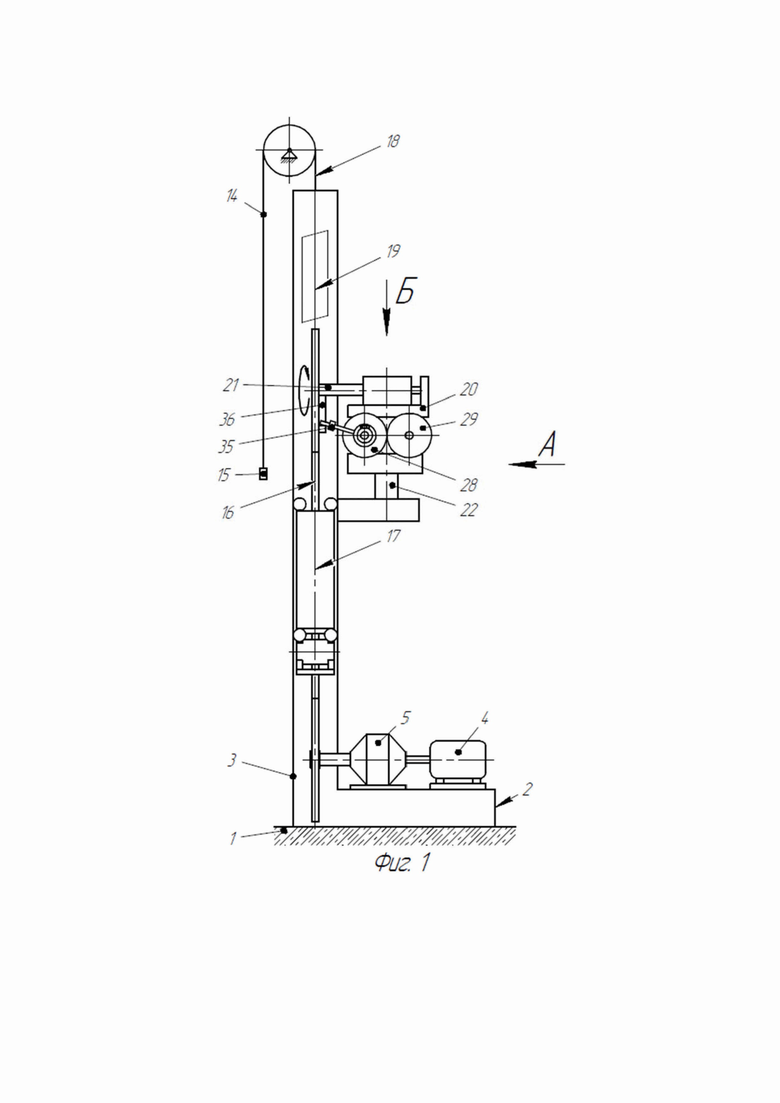
На фиг. 1 изображен привод скважинного штангового насоса, вид сбоку.
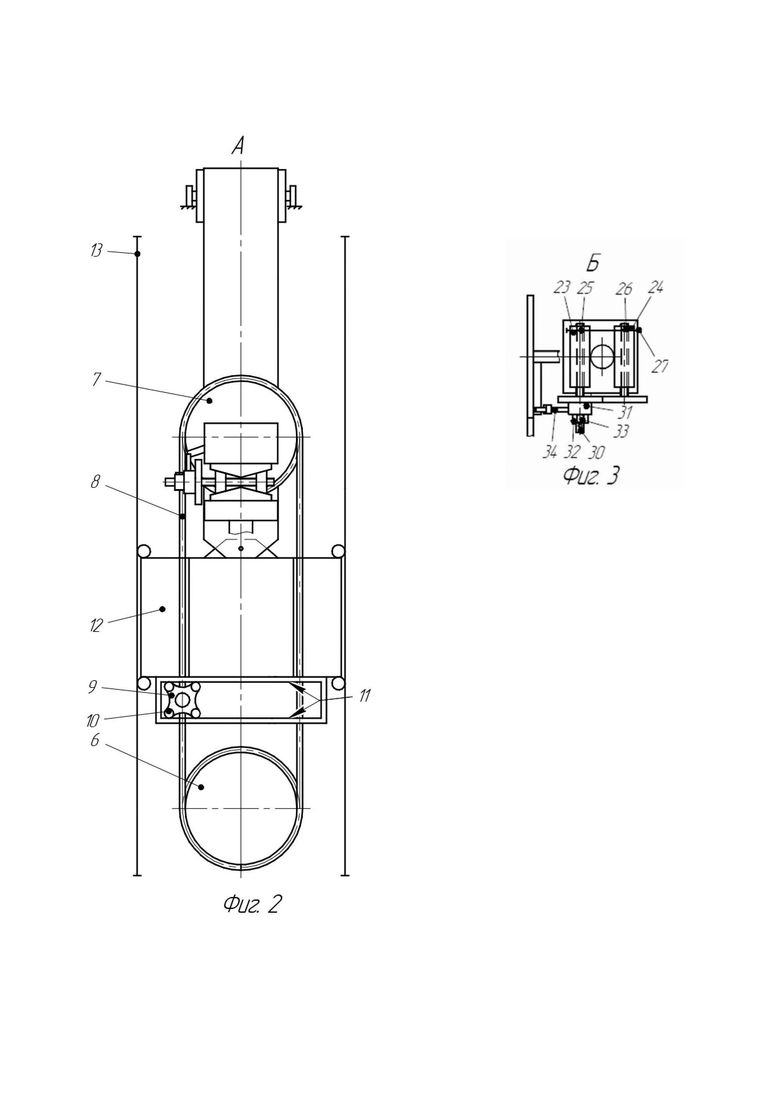
На фиг. 2 - вид сзади.
На фиг. 3 - натяжной механизм вид сверху.
Привод скважинного штангового насоса (фиг. 1-2) содержит установленные на основании 1 раму 2 с корпусом 3, двигатель 4, редуктор 5, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий 6 и ведомый 7 шкивы, например, звездочки, или зубчатые шкивы, охваченные непрерывным гибким звеном 8, например, цепью или зубчатым ремнем, связанным с кареткой 9, в состав которого входят колеса 10 с направляющими 11, соединенным с противовесом 12, установленным в направляющих 13 корпуса 3 и связанным через гибкое звено 14, например, транспортерную ленту, или канат, с узлом подвески штанг 15, причем ось 16 преобразующего механизма, ось 17 противовеса 12 и ось 18 гибкого звена 14 находятся вблизи одной вертикальной плоскости 19, а верхний ведомый шкив 7 установлен в корпусе 3 с возможностью вращения и ограниченного перемещения вдоль оси 16 преобразующего механизма для регулирования натяжения непрерывного гибкого звена 8 при помощи натяжного механизма, состоящего из подвижного корпуса 20 с осью 21 шкива 7 и осью опоры 22, выполненным в виде двух клиновых домкратов 23 и 24 с винтами правой резьбы 25 и левой резьбы 26 (фиг. 3), соединенных с одной стороны - противоулетной шпилькой 27, с другой стороны на них установлены зубчатые колеса 28 и 29, находящиеся в зацеплении между собой, на оси винта 25 с глухими отверстиями 30 расположен храповый механизм 31 с жестко закрепленным фиксирующим устройством 32 и предотвращающим движение вокруг своей оси болтом крепления 33, в движение винт 25 приводит штанга храпового механизма 34 с утяжелителем 35, который приводит в движение ведомый шкив 7 (фиг. 2), на котором жестко закреплен механизм переключения 36 (фиг. 1), позволяющий производить автоматическое натяжение непрерывного гибкого звена 8.
Работа устройства осуществляется следующим образом.
Возле устья скважины устанавливается основание 1 (фиг. 1) привода.
На основании 1 монтируется привод в сборе. Колонна штанг установки скважинного штангового насоса (на фиг. 1-3 не показана) подвешивается на узел подвески штанг 15 привода.
После включения двигателя 4 (фиг. 1) вращение через редуктор 5 передается на ведущий шкив 6 (фиг. 2) преобразующего механизма, который тянет непрерывное замкнутое гибкое звено 8, допустим, вниз. Связанная с гибким звеном 8 каретка 9, соединенная с противовесом 12, оснащенная колесами (на фиг. 1-3 не показаны), движется также вниз по направляющим 13 корпуса 3 (фиг. 1), а связанный с противовесом 12 (фиг. 2) через гибкое звено 14 (фиг. 1) узел подвески штанг 15 поднимается вверх, соответственно, поднимая колонну штанг с плунжером скважинного штангового насоса (на фиг. 1-3 не показаны). При достижении кареткой 9 (фиг. 2) преобразующего механизма крайнего нижнего положения происходит переход с хода вниз противовеса 12 на ход вверх за счет перехода каретки 9, оснащенной колесами 10, по направляющим 11 с одной ветви гибкого звена 8 на другую - происходит преобразование вращательного движения ведущего шкива 6 в возвратно-поступательное противовеса 12. Соответственно, при этом происходит изменение направления движения узла подвески штанг 15 (фиг. 1) с хода вверх на ход вниз. То же самое происходит при переходе каретки 9 (фиг. 2) через крайнее верхнее положение - только с хода вниз на ход вверх узла подвески штанг 15 (фиг. 1).
Для снижения нагрузок на элементы преобразующего механизма, в частности на гибкое звено 8 (фиг. 2), ось 16 (фиг. 1) преобразующего механизма, ось 17 противовеса 12 и ось 18 гибкого звена 14 расположены вблизи одной вертикальной плоскости 19.
Рама 2 (фиг. 1) может быть жестко присоединена к корпусу 3 или может регулироваться (на фиг.1-3 не показано) относительно корпуса 3 в зависимости от требований технологичности сборки привода.
Во время эксплуатации привода гибкое звено 8 (фиг. 2) под действием циклической нагрузки и вследствие износа будет удлиняться, поэтому в конструкции привода для исключения влияния человеческого фактора и поддержания постоянного натяжения гибкого звена 8 предусмотрено автоматическое натяжение гибкого звена 8 путем перемещения верхнего ведомого шкива 7 вдоль оси 16 (фиг. 1) преобразующего механизма с помощью натяжного механизма гибкого звена 8 (фиг. 2).
Натяжной механизм работает следующим образом. Непрерывное гибкое звено 8 передает правое вращение ведомому шкиву 7, находящемуся на оси 21 и механизму переключения 36 в свою очередь который при каждом обороте поднимает штанга храпового механизма 34 и утяжелитель 35 до щелчка в храповом механизме 31. После прохождения механизма переключателя 36 штанга храпового механизма 34 опускается вниз в первоначальное положение за счет утяжелителя 35. В свою очередь расположение утяжелителя 35 можно регулировать путем перемещения по штанге храпового механизма 34 в зависимости от необходимого усилия давления на штангу. Механизм переключения 36 расположен на всю длину радиуса ведомого шкива 7, для возможности регулирования расположения храпового механизма по горизонтали. Храповый механизм передает вращение винту 25 за счет жестко закрепленного к нему фиксирующего устройства 32 с болтом крепления 33. Регулирование расположения храпового механизма 31 в горизонтальной плоскости относительно ведомого шкива 7 производится путем перемещения по валу винта 25, где предусмотрены отверстия 30 под болт крепления 33 с последующей фиксацией. Винт 25 передает вращение зубчатому колесу 28 и зубчатому колесу 29, которые жестко посажены на винт правой резьбы 25 и винт левой резьбы 26, которые в свою очередь поднимают клиновые домкраты 23 и 24. Для равномерного поднятия клиновых домкратов 23 и 24 винт 26 изготовлен с левой резьбой. Клиновые домкраты 23 и 24 расположены между опор передвижного корпуса 20 с осью верхней опоры 22 и соединены противоулетной шпилькой 27. Передаточное число зубьев храпового механизма 31 рассчитано таким образом, чтобы с каждым срабатыванием производился подъем клиновых домкратов 23 и 24 достаточную для натяжения гибкого звена 8.
Благодаря использованию предлагаемого устройства повышается надежность, долговечность и эффективность работы привода за счет постоянного автоматического натяжения гибкого звена без участия обслуживающего персонала.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2016 |
|
RU2611126C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2547674C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2015 |
|
RU2578011C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2559962C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2570541C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560111C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560113C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2517950C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА (ВАРИАНТЫ) | 2001 |
|
RU2200876C1 |
Изобретение относится к техническим средствам для подъема жидкости из скважин, а именно к приводу скважинного штангового насоса. Привод содержит установленные на основании 1 раму 2 с корпусом 3, двигатель 4, редуктор 5, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса 3 и связанным через гибкое звено 14 с узлом подвески штанг 15, ось 16 преобразующего механизма, ось 17 противовеса и ось 18 гибкого звена 14, находящиеся вблизи одной вертикальной плоскости 19. Верхний ведомый шкив установлен в корпусе 3 с возможностью вращения и ограниченного перемещения вдоль оси 16 для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, включающего подвижный корпус 20 с осью 21 шкива и храповой механизм. Натяжной механизм состоит из двух клиновых домкратов с винтами правой и левой резьбы, соединенных с одной стороны противоулетной шпилькой, с другой стороны на них установлены зубчатые колеса 28 и 29, находящиеся в зацеплении между собой. На оси винта с правой резьбой с глухими отверстиями расположен храповой механизм с жестко закрепленным фиксирующим устройством, предотвращающим движение вокруг своей оси болтом крепления. В движение винт приводит штанга храпового механизма с утяжелителем 35, который в свою очередь приводит в движение ведомый шкив, на котором жестко закреплен механизм переключения 36, позволяющий производить автоматическое натяжение непрерывного гибкого звена. Изобретение направлено на повышение надежности, долговечности и эффективности работы привода. 3 ил.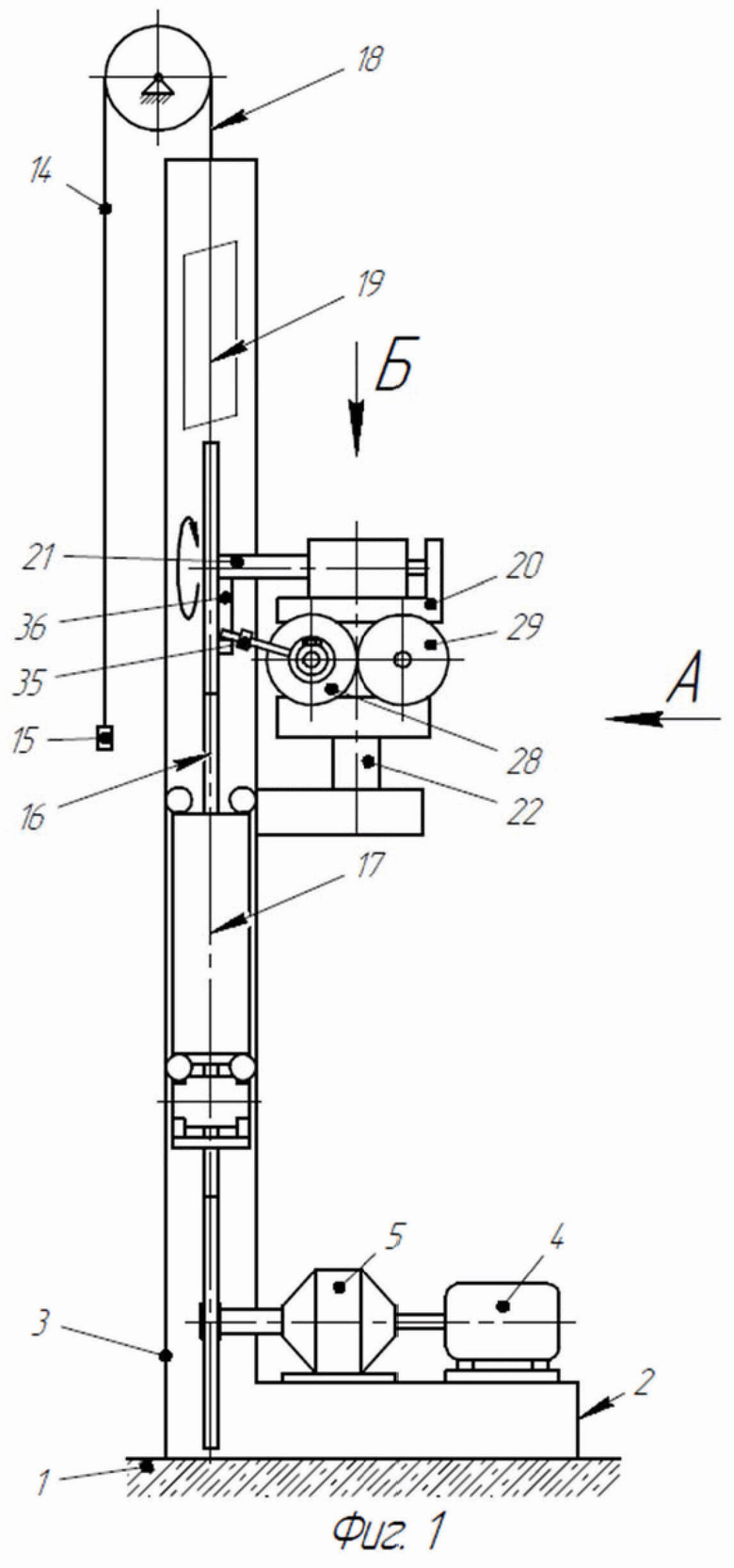
Привод скважинного штангового насоса, содержащий установленные на основании раму с корпусом, двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, оси преобразующего механизма, противовеса и гибкого звена, находящиеся вблизи одной вертикальной плоскости, при этом верхний ведомый шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, включающего подвижный корпус с осью шкива и храповой механизм, отличающийся тем, что натяжной механизм состоит из двух клиновых домкратов с винтами правой и левой резьбы, соединенных с одной стороны противоулетной шпилькой, с другой стороны на них установлены зубчатые колеса, находящиеся в зацеплении между собой, а на оси винта с правой резьбой с глухими отверстиями расположен храповой механизм с жестко закрепленным фиксирующим устройством, предотвращающим движение вокруг своей оси болтом крепления, в движение винт приводит штанга храпового механизма с утяжелителем, который в свою очередь приводит в движение ведомый шкив, на котором жестко закреплен механизм переключения, позволяющий производить автоматическое натяжение непрерывного гибкого звена.
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2016 |
|
RU2611126C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2517950C1 |
| CN 106930731 A, 07.07.2017 | |||
| US 2023407862 A1, 21.12.2023. | |||

