Изобретение относится к техническим средствам для подъема жидкости из скважин и может быть использовано в нефтедобывающей промышленности для добычи нефти скважинными штанговыми насосами.
Известен привод скважинного штангового насоса (патент RU №2200876, МПК F04B 47/02, опубл. 20.03.2003, бюл. №8), содержащий установленную на основании раму и размещенные на ней двигатель, механизм преобразования вращательного движения в возвратно-поступательное, включающий ведущий шкив и криволинейный направляющий элемент с постоянным радиусом кривизны, охваченный гибким непрерывным звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих и связанным через гибкое звено с колонной штанг, при этом противовес выполнен сборным, состоящим из основного противовеса, нормализующего работу привода насоса, снабженного штангами минимального сечения и спущенного на минимальную глубину скважины, и дополнительных противовесов, выполненных с возможностью размещения их массы симметрично относительно оси симметрии плоскости гибкого непрерывного звена на основном противовесе, при этом суммарный центр тяжести расположен в непосредственной близости от этой плоскости, а гибкое звено, связывающее противовес с колонной штанг, размещено с образованием четного числа параллельных ветвей, узлы соединения ветвей гибкого звена с противовесом размещены попарно симметрично относительно оси симметрии гибкого звена за пределами его контура, при этом узлы соединения гибкого звена с противовесом и узлом подвески штанг выполнены с обеспечением одинакового натяжения всех ветвей гибкого звена, а рама снабжена колесами и дополнительным приводом и выполнена с возможностью фиксации относительно основания в любых положениях, а колеса установлены с возможностью взаимодействия с направляющими, и дополнительную раму, соединенную с основной рамой с возможностью перемещения в направлении оси симметрии контура гибкого непрерывного звена, проходящей через ведущий и криволинейный направляющий элемент преобразующего механизма, причем соединение выполнено с возможностью фиксации дополнительной рамы относительно основной в любом положении, при этом гибкое звено, связывающее противовес с колонной штанг, выполнено замкнутым.
Известен привод скважинного штангового насоса (патент US №4916959, Int. Cl. 4 В66В 5/26, опубл. 17.04.1990), содержащий установленные на основании на единой раме с корпусом двигатель, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомые шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний (ведомый) шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена.
Однако известные устройства имеют следующие недостатки:
- во-первых, натяжение непрерывного гибкого звена регулируется периодически с участием обслуживающего персонала, что приводит к образованию провиса (ослабления) гибкого звена между регулировками, из-за чего возникают динамические нагрузки в преобразующем механизме, сокращающие срок службы гибкого звена и всей установки или приводящие к более частому регулированию натяжения, что существенно повышает затраты на обслуживание;
- во-вторых, для оптимального натяжения гибкого звена обслуживающему персоналу необходимо определить величину натяжения с использованием специальных устройств и приборов, что приводит к дополнительным вложениям;
- в-третьих, для регулирования натяжения гибкого звена обслуживающим персоналом необходимо остановить привод, что приводит к потерям добываемой продукции, а также затратам рабочего времени обслуживающего персонала;
- в-четвертых, регулирование обслуживающим персоналом натяжения гибкого звена происходит при расположении противовеса на технологических упорах с возможностью последующего подъема противовеса для снятия с упоров, что приводит к чрезмерному натяжению одного участка гибкого звена при недостаточном натяжении другого и является причиной его преждевременного выхода из строя.
Наиболее близким по технической сущности является привод скважинного штангового насоса (патент RU №2522729, МПК F04B 47/02, опубл. 20.07.2014, бюл. №20), содержащий установленные на основании на раме с корпусом двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний (ведомый) шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса и соединенного с толкателем, выполненным в виде винтовой пары, гайка которого жестко соединена с корпусом, и противоотворотного механизма, причем противоотворотный механизм выполнен в виде автоматического механизма, а винт винтовой пары снабжен барабаном с намотанным гибким звеном, конец которого через блок соединен с грузом, выполненным с возможностью вращения барабана для натяжения непрерывного гибкого звена винтовой парой при ослаблении и перемещении каретки с противовесом вниз.
Недостатками известного решения являются:
- во-первых, невозможность диагностирования работы преобразующего механизма привода (контроль износа гибкого звена, контроль работы натяжного механизма, определения усилия в гибком звене и др.) дистанционно, не приезжая на скважину;
- во-вторых, необходимость принятия мер для преодоления момента страгивания в винтовой паре в начале вращения винта, т.е. веса груза, подобранного для автоматической работы натяжного механизма, при определенных обстоятельствах, например при застывании смазки из-за перепада температур, контакта смазки с внешней средой (пылью, механическими примесями и др.) или из-за продолжительного простоя привода и др., может не хватить для поворота винта в начальный момент его движения, что приведет к неудовлетворительной работе натяжного механизма.
Техническими задачами изобретения являются автоматическое поддержание постоянного натяжения гибкого звена преобразующего механизма с дистанционным диагностированием его работы, а также исключение влияния момента страгивания на работоспособность натяжного механизма.
Поставленные технические задачи решаются приводом скважинного штангового насоса, содержащим установленные на основании на раме с корпусом двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний ведомый шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса привода и соединенного с толкателем.
Новым является то, что толкатель натяжного механизма выполнен в виде ромбовидного винтового домкрата, состоящего из оснований домкрата, соединенных шарнирами в виде ромба, противоположные углы которых выполнены с возможностью сближения или расхождения под действием винтовой пары, причем одно основание домкрата зафиксировано относительно корпуса, а другое основание домкрата - относительно подвижного корпуса натяжного механизма, при этом винт винтовой пары домкрата соединен с электрическим приводом, позволяющим перемещать основание домкрата с подвижной частью натяжного механизма при ослаблении натяжения гибкого звена ниже выбранной величины усилия натяжения гибкого звена, определенным датчиком нагрузки, который функционально связан с блоком управления.
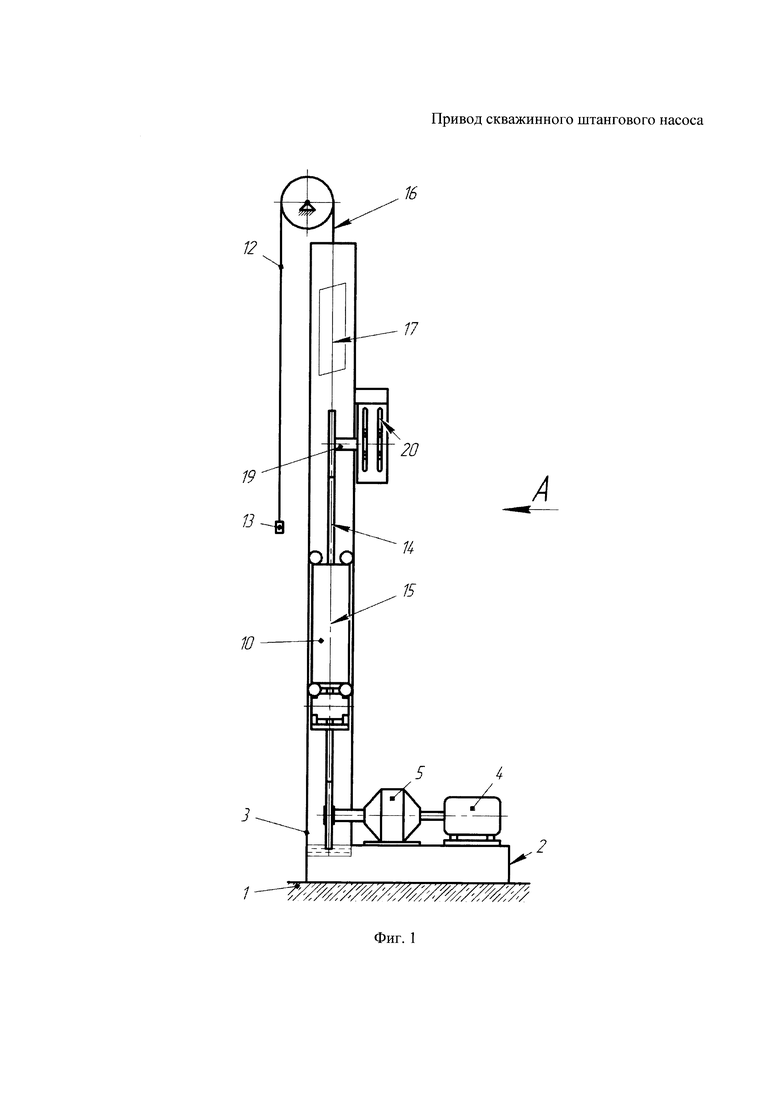
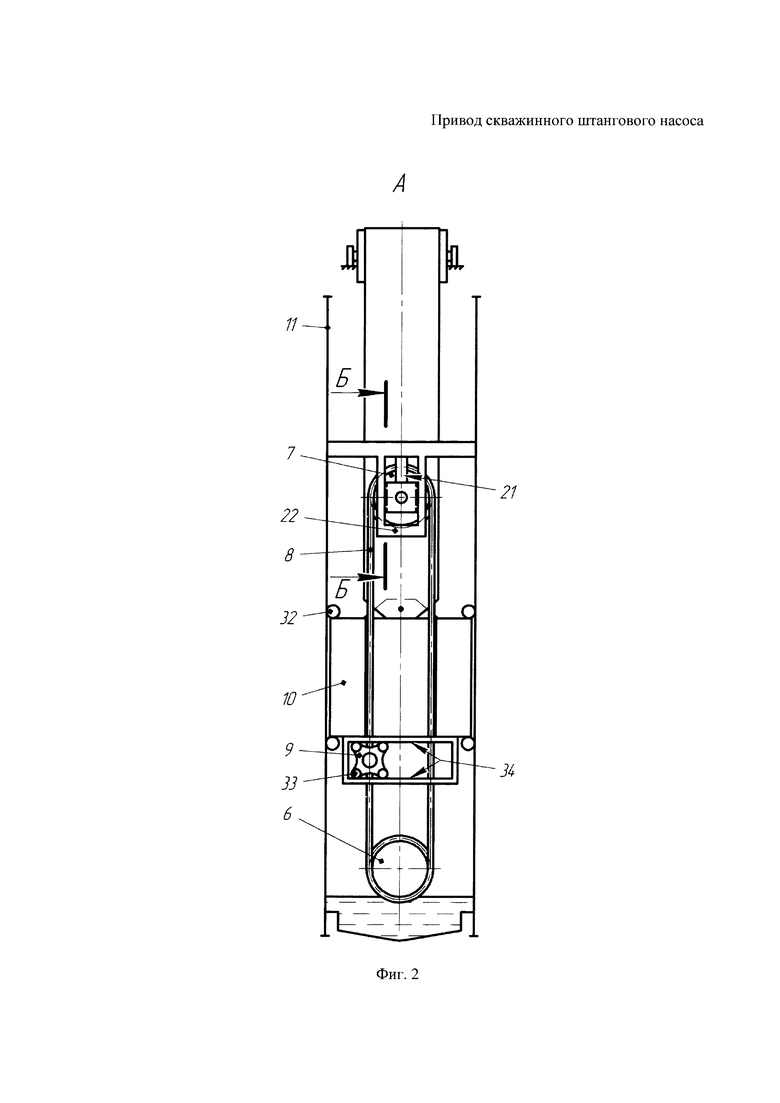
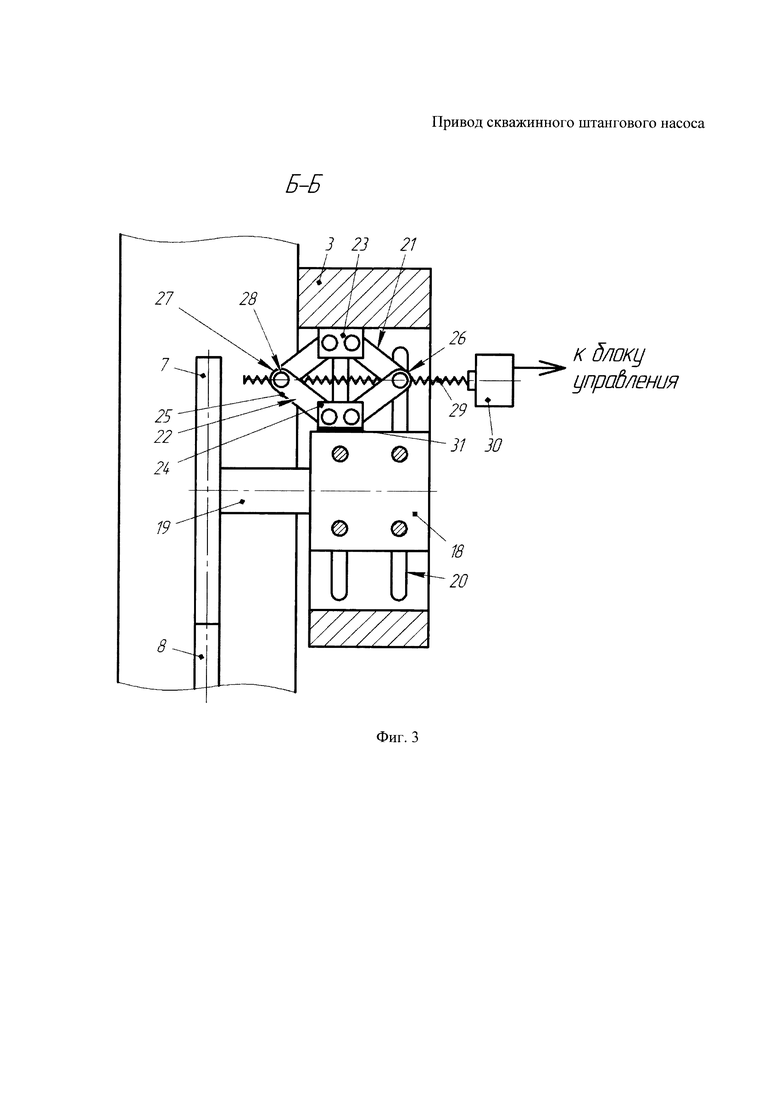
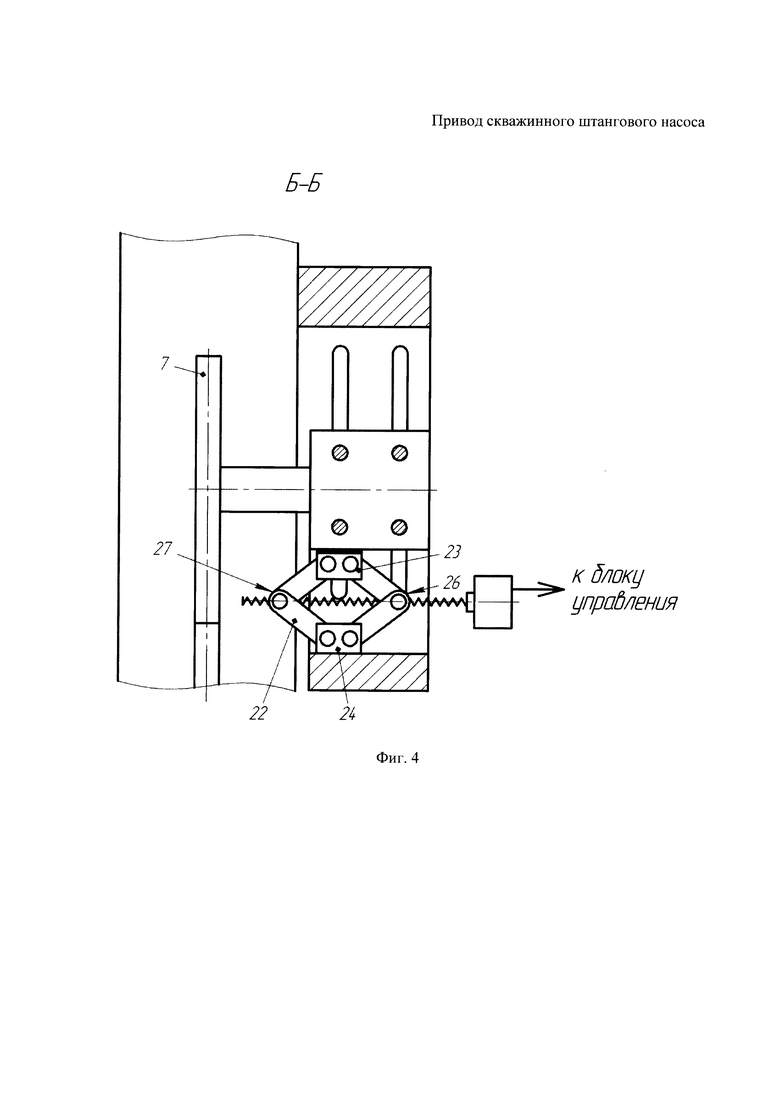
На фиг. 1 схематично изображен привод скважинного штангового насоса (вид сбоку); на фиг. 2 - то же, вид А по фиг. 1 (рама 2, двигатель 4 и редуктор 5 не показаны); на фиг. 3 - схема натяжного механизма привода при расположении над подвижным корпусом (разрез Б-Б по фиг. 2); на фиг. 4 - схема натяжного механизма привода при расположении под подвижным корпусом (разрез Б-Б по фиг. 2).
Привод скважинного штангового насоса, содержащий установленные на основании 1 (фиг. 1) на раме 2 с корпусом 3 двигатель 4, редуктор 5, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий 6 (фиг. 2) и ведомый 7 шкивы, например, звездочки, или зубчатые шкивы, или т.п., охваченные непрерывным гибким звеном 8, например цепью, или зубчатым ремнем, или т.п., связанным с кареткой 9, соединенной с противовесом 10, установленным в направляющих 11 корпуса 3 (фиг. 1) и связанным через гибкое звено 12, например транспортерную ленту, или канат, или т.п., с узлом подвески штанг 13, причем ось 14 преобразующего механизма, ось 15 противовеса 10 и ось 16 гибкого звена 12 находятся вблизи одной вертикальной плоскости 17, а верхний (ведомый) шкив 7 (фиг. 2) установлен в корпусе 3 (фиг. 1) с возможностью вращения и ограниченного перемещения вдоль оси 14 преобразующего механизма для регулирования натяжения непрерывного гибкого звена 8 (фиг. 3) при помощи натяжного механизма, состоящего из подвижного корпуса 18 с осью 19 шкива 7, установленного на продольных салазках 20 корпуса 3 привода и соединенного с толкателем 21. Источником энергии для двигателя 4 может быть электрическая энергия, тогда в качестве двигателя будет электродвигатель, или энергия сгорающего топлива (двигатель внутреннего сгорания), или другой вид энергии и соответствующий двигатель.
Толкатель 21 натяжного механизма выполнен в виде ромбовидного винтового домкрата 22, состоящего из оснований 23 и 24 домкрата 22, соединенных шарнирами 25 в виде ромба, противоположные углы 26 и 27 которых выполнены с возможностью расхождения под действием винтовой пары 28, причем одно основание 23 домкрата 22 зафиксировано относительно корпуса 3, а другое основание 24 домкрата 22 - относительно подвижного корпуса 18 натяжного механизма, при этом винт 29 винтовой пары 28 домкрата 22 соединен с электрическим приводом 30, позволяющим перемещать основание 24 домкрата 22 с подвижной частью натяжного механизма при ослаблении натяжения гибкого звена 8 ниже выбранной величины усилия натяжения гибкого звена 8, определенного датчиком нагрузки 31, который функционально связан с блоком управления (не показан).
Электрический привод 30 может состоять только из электродвигателя, как на фиг. 3, или электродвигателя с передачей, которая может быть механической (зубчатой, ременной и др.), гидравлической или другой, или иного привода, источником энергии которого является электрическая энергия.
В качестве датчика нагрузки 31 могут быть применены известные конструкции датчиков, например датчик, определяющий усилие на основании 24 домкрата 22, как на фиг. 3, или датчик усилия натяжения гибкого звена 8 (не показан) или датчик любого другого вида, установленный как на электродвигателе, так и на любом другом элементе преобразующего механизма, а также комбинации различных видов датчиков. На конструкцию датчика нагрузки 31 авторы не претендуют.
Блок управления может быть встроен в датчик нагрузки 31, например, в виде концевого выключателя (не показан) или может быть в виде отдельного узла, находящегося на приводе, например на станции управления (не показана) двигателем 4 привода, или находящийся на расстоянии, например на диспетчерском пункте (на фигурах не показан).
Работа устройства осуществляется следующим образом.
Возле устья скважины устанавливается основание 1 (фиг. 1) привода. Основание 1 может быть выполнено в виде фундаментной плиты в случае стационарного размещения привода или саней (не показан) - в случае передвижного (мобильного) варианта привода. На основании 1 монтируется привод в сборе. Колонна штанг установки скважинного штангового насоса (не показана) подвешивается на узел подвески штанг 13 привода.
После включения двигателя 4 (фиг. 1) вращение через редуктор 5 и ведущий шкив 6 (фиг. 2) преобразующего механизма передается на непрерывное замкнутое гибкое звено 8. Допустим, гибкое звено 8 двигается против часовой стрелки. Связанная с гибким звеном 8 каретка 9, соединенная с противовесом 10, оснащенным колесами 32, движется вниз по направляющим 11 корпуса 3 (фиг. 1), а связанный с противовесом 10 (фиг. 2) через гибкое звено 12 (фиг. 1) узел подвески штанг 13 поднимается вверх, соответственно поднимая колонну штанг с плунжером скважинного штангового насоса (показаны). При достижении кареткой 9 (фиг. 2) преобразующего механизма крайнего нижнего положения происходит переход с хода вниз противовеса 10 на ход вверх за счет перехода каретки 9, оснащенной колесами 33, по направляющим 34 с одной ветви гибкого звена 8 на другую - происходит преобразование вращательного движения ведущего шкива 6 в возвратно-поступательное противовеса 10. Соответственно при этом происходит изменение направления движения узла подвески штанг 13 (фиг. 1) с хода вверх на ход вниз. То же самое происходит при переходе каретки 9 (фиг. 2) через крайнее верхнее положение -только с хода вниз на ход вверх узла подвески штанг 13 (фиг. 1).
Для снижения нагрузок на элементы преобразующего механизма, в частности на гибкое звено 8 (фиг. 2), оси 14 (фиг. 1) преобразующего механизма, 15 противовеса 10 и 16 гибкого звена 12 расположены вблизи одной вертикальной плоскости 17.
Рама 2 (фиг. 1) может быть жестко присоединена к корпусу 3 или может регулироваться (не показано) относительно корпуса 3 в зависимости от требований технологичности сборки привода.
Во время эксплуатации привода гибкое звено 8 (фиг. 2) под действием циклической нагрузки и вследствие износа будет удлиняться, поэтому в конструкции привода для исключения влияния человеческого фактора и поддержания постоянного натяжения гибкого звена 8 предусмотрен механизм автоматического натяжения гибкого звена 8 путем перемещения верхнего (ведомого) шкива 7 вдоль оси 14 (фиг. 1) преобразующего механизма с помощью натяжного механизма по мере ослабления гибкого звена 8 (фиг. 2).
Принцип работы натяжного механизма заключается в следующем. Когда каретка 9 (фиг. 2) переходит через крайнее нижнее положение, происходит натяжение всего гибкого звена 8, т.е. гибкое звено 8 полностью равномерно нагружается тяговым усилием от нижнего (ведущего) шкива 6. По мере хода каретки 9 с противовесом 10 вверх нагруженный участок гибкого звена 8 уменьшается от максимальной, полной длины замкнутого гибкого звена 8, после перехода каретки 9 через крайнее нижнее положение, до минимальной длины при подходе каретки 9 к крайнему нижнему положению после хода вниз, следующем за ходом вверх каретки 9 с противовесом 10. Ненагруженный участок гибкого звена 8 расслаблен. Во время нахождения каретки 9 с противовесом 10 на прямолинейном участке хода вниз происходит ослабление большего участка гибкого звена 8. Натяжение в этом участке будет более эффективным, чем в остальных положениях каретки 9 с противовесом 10, так как на верхний шкив 7 действует разная нагрузка при ходе вверх и ходе вниз противовеса 10, отличающаяся величиной силы, действующей от веса противовеса 10, т.е. при ходе вниз на узел верхнего шкива 7 нагрузка от веса противовеса 10 не действует. Для примера, на приводе скважинного штангового насоса ПЦ 60-3-0,5/2,5 производства Бугульминского механического завода при ходе вверх противовеса привода нагрузка на натяжной механизм будет порядка 76500 H, а при ходе вниз - 3950 Н. Натяжной механизм работает именно в этом участке хода вниз противовеса 10. При срабатывании в других положениях противовеса 10 потребовалось бы существенно большее усилие на толкателе 21 натяжного механизма, что привело бы к чрезмерному натяжению гибкого звена 8 на прямолинейном участке хода вниз противовеса 10. Гибкое звено 8 (фиг. 2) авторы считают оптимально натянутым при его расположении на шкивах 6 и 7 без провисания, т.е. усилие натяжения гибкого звена 8 выбирается превышающим суммарный вес подвижного корпуса 18 с осью 19 и звездочкой 7 и расслабленной части гибкого звена 8 на величину усилия, достаточного для исключения провисания гибкого звена 8, определяемую опытным путем. Датчик нагрузки 31 (фиг. 3) перед пуском в работу привода настраивается на выбранное усилие натяжения. Натяжной механизм сработает при снижении фактической нагрузки, зафиксированной датчиком нагрузки 31, ниже выбранной величины усилия: по команде блока управления автоматически включается электропривод 30, который, вращая винт 29 винтовой пары 28, разводит противоположные углы 26 и 27, соединенные шарнирами 25 в виде ромба, и тем самым поднимает основание 24 домкрата 22 и жестко связанный с ним подвижный корпус 18 натяжного механизма, что приводит к натяжению гибкого звена 8 до выбранной величины усилия, после чего электропривод 30 по команде блока управления отключается до следующего снижения.
При использовании в качестве датчика нагрузки 31 двух датчиков усилия натяжения (не показаны), установленных на разных ветвях гибкого звена 8, блок управления при расхождении показаний датчиков подает команду на включение электропривода 30, который выравнивает усилия, после чего по команде с блока управления отключается до следующей команды на включение.
Исходя из изложенного, крутящий момент, создаваемый механизмом вращения 29 (фиг. 3) на винте 28, рассчитывается таким, чтобы усилие на толкателе 21 было не меньше усилия для поднятия суммарного веса подвижного корпуса 18 с осью 19 и звездочкой 7 и расслабленной части гибкого звена 8, а также для преодоления потерь на трение в узлах натяжного механизма и в салазках 20. Для приведенного выше в качестве примера привода ПЦ 60-3-0,5/2,5 суммарный вес составляет порядка 3950 H без учета потерь в натяжном механизме. При использовании ромбовидного домкрата в наиболее выгодном диапазоне его работы, при котором усилие на винте 29 меньше поднимаемого веса и обеспечивается необходимый ход натяжения, получаем необходимый максимальный крутящий момент порядка 7 Н⋅м.
Ход подвижного корпуса 18 (ход натяжения) ограничен и выбирается исходя из необходимого и достаточного диапазона регулирования натяжения гибкого звена 8 (фиг. 2), определяемого на основании условий и опыта эксплуатации примененного в приводе гибкого звена 8. Предлагаемый натяжной механизм позволяет настроить ход подвижного корпуса 18 на весь срок службы гибкого звена 8. Например, в случае применения в качестве гибкого звена 8 цепи предел удлинения соответственно и срок службы цепи равен двум шагам, т.е. для приведенного в качестве примера привода ПЦ 60-3-0,5/2,5 с цепью 2ПР-50,8-453,6 предел удлинения соответствует значению 101,6 мм, после исчерпания которого необходимо произвести ремонт или замену цепи. Такому удлинению цепи соответствует ход подвижного корпуса 18 (фиг. 3) вдоль оси 14 (фиг. 1) преобразующего механизма 50,8 мм при длине хода привода 3 м и делительном диаметре звездочек 6 и 7 (фиг. 2), равном 244,33 мм.
Электропривод 30 в основном будет работать в кратковременном режиме: кратковременный пуск и относительно длительная остановка, при котором будет использоваться качество электродвигателей в виде кратного превышения пускового момента над номинальным, обычно примерно в 2 раза. В номинальном режиме электропривод 30 будет работать только при предварительном натяжении гибкого звена 8 и снятии натяжения натяжного механизма для снятия гибкого звена 8. Мощность электропривода 30 подбирается для номинального режима. Для рассматриваемого случая с приводом ПЦ 60-3-0,5/2,5 в натяжном механизме достаточно использовать электропривод 30 с номинальной частотой вращения электродвигателя 750 мин-1 и мощностью 1,5 кВт, а при использовании в качестве электропривода 30 электродвигателя с номинальной частотой вращения электродвигателя 1500 мин-1 с планетарной передачей с передаточным отношением, например, 8 мощность электродвигателя будет 0,5 кВт. Использование электродвигателя малой мощности и его работа в кратковременном режиме незначительно увеличивает общее потребление приводом электроэнергии. Для сравнения в приведенном примере в качестве основного двигателя 4 (фиг. 1) используется электродвигатель мощностью 5,5 кВт.
Салазки 20 (фиг. 1) позволяют корпусу 18 (фиг. 3) натяжного механизма перемещаться только вдоль оси 14 (фиг. 1) преобразующего механизма.
После исчерпания хода подвижного корпуса 18 (фиг. 3) происходит остановка привода с выдачей соответствующей информации блоком управления (не показан) о необходимости замены гибкого звена 8, что позволит исключить поломку привода, которая может возникнуть при обрыве гибкого звена 8.
Предложенное техническое решение позволяет автоматически, без участия обслуживающего персонала и остановки привода, поддерживать непрерывное гибкое звено 8 преобразующего механизма привода в оптимальном состоянии - без провисания и перетяжки, поэтому сократятся трудоемкость и затраты на обслуживание привода.
Если гибкое звено 8 растянуто (в приводе без натяжного механизма), то в момент перехода каретки 9 через крайнее нижнее положение (ведущий шкив 6 вращается с постоянной скоростью) происходит натяжение расслабленного ненагруженного участка замкнутого гибкого звена 8 за счет вращения ведомого шкива 7 с осью 19 в корпусе 18, сопровождаемое замедлением каретки 9, двигающейся по инерции, и последующим ударом, приводящим к дополнительным ударным нагрузкам в работе привода и установки скважинного штангового насоса в целом, в разы превосходящим расчетные динамические нагрузки. Величина удара зависит от провиса гибкого звена 8 - чем больше провис, тем сильнее удар. Автоматическое поддержание постоянного натяжения гибкого звена 8 в предлагаемой конструкции позволит избежать лишних нагрузок, что увеличит срок службы гибкого звена 8 и привода в целом, а также уменьшит ударные нагрузки на скважинное оборудование установки скважинного штангового насоса.
При расположении блока управления в виде отдельного узла на диспетчерском пункте (не показан) или в станции управления (не показан) приводом по показаниям датчика нагрузки 31 можно дополнительно получать данные об изменениях нагрузки в течение времени и цикла хода противовеса 10, изменять величину усилия натяжения гибкого звена 8, динамику износа и необходимость замены гибкого звена 8 и другие параметры, позволяющие в реальном времени контролировать работу основного элемента привода - преобразующего механизма - и спрогнозировать сроки проведения технического обслуживания привода, что приведет к существенной экономии на обслуживании приводов по сравнению с обслуживанием через фиксированные промежутки календарного времени.
Для снятия гибкого звена 8 со шкивов 6 и 7, например, с целью его замены или для замены шкивов 6 и/или 7, или для других целей, необходимо переключить натяжной механизм через блок управления электрический привод 30 на обратное вращение, при этом подвижная часть толкателя 21, соответственно и подвижный корпус 18 привода с осью 19 и шкивом 7, опустятся вниз, ослабив гибкое звено 8. При достижении положения шкива 7, при котором можно снять гибкое звено 8 со шкива 7, электропривод 8 вручную отключается.
Использование ромбовидного винтового домкрата 22 позволяет уменьшить диаметр винта 29 винтовой пары 28, определяемый из условия устойчивости от действия на основание 24 суммарного веса подвижного корпуса 18 с осью 19 и звездочкой 7, гибкого звена 8 и противовеса 10, что позволяет уменьшить момент страгивания по сравнению с прототипом, а в совокупности с применением электропривода 30 с кратным превышением пускового момента над номинальным исключает влияние момента страгивания на работоспособность натяжного механизма.
Предлагаемое устройство аналогично работает при расположении натяжного механизма под верхним (ведомым) шкивом 7 (фиг. 2). Разница при таком расположении в том, что основание 23 (фиг. 4) домкрата 22 будет располагаться внизу, а основание 24 - наверху, и противоположные углы 26 и 27 натяжного механизма для натяжения гибкого звена 8 (фиг. 2) будут не расходиться, а сближаться.
Благодаря использованию предлагаемого устройства автоматически поддерживается постоянное натяжение гибкого звена преобразующего механизма с дистанционным диагностированием его работы, а также исключается влияние момента страгивания на работоспособность натяжного механизма.
| название | год | авторы | номер документа |
|---|---|---|---|
| Привод скважинного штангового насоса | 2024 |
|
RU2833741C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2015 |
|
RU2578011C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2547674C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2570541C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560111C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2560113C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2559962C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2517950C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА (ВАРИАНТЫ) | 2001 |
|
RU2200876C1 |
Изобретение относится к устройствам для подъема жидкости из скважин для использования в нефтедобывающей промышленности для добычи нефти. Привод содержит двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное. Оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости. Верхний ведомый шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма. Механизм состоит из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса привода и соединенного с толкателем. Толкатель выполнен в виде винтового домкрата, состоящего из оснований домкрата, соединенных шарнирами в виде ромба. Противоположные углы ромба выполнены с возможностью сближения или расхождения под действием винтовой пары. Одно основание домкрата зафиксировано относительно корпуса, а другое основание - относительно подвижного корпуса. Винт винтовой пары соединен с электрическим приводом для перемещения основания домкрата с подвижной частью натяжного механизма при ослаблении натяжения гибкого звена ниже выбранной величины усилия натяжения гибкого звена. Содержит датчик нагрузки, функционально связанный с блоком управления. Автоматически поддерживается постоянное натяжение гибкого звена преобразующего механизма с дистанционным диагностированием его работы, а также исключается влияние момента страгивания на работоспособность натяжного механизма. 4 ил.
Привод скважинного штангового насоса, содержащий установленные на основании на раме с корпусом двигатель, редуктор, механизм, преобразующий вращательное движение в возвратно-поступательное, включающий ведущий и ведомый шкивы, охваченные непрерывным гибким звеном, связанным с кареткой, соединенной с противовесом, установленным в направляющих корпуса и связанным через гибкое звено с узлом подвески штанг, причем оси преобразующего механизма, противовеса и гибкого звена находятся вблизи одной вертикальной плоскости, а верхний ведомый шкив установлен в корпусе с возможностью вращения и ограниченного перемещения вдоль оси преобразующего механизма для регулирования натяжения непрерывного гибкого звена при помощи натяжного механизма, состоящего из подвижного корпуса с осью шкива, установленного на продольных салазках корпуса привода и соединенного с толкателем, отличающийся тем, что толкатель натяжного механизма выполнен в виде ромбовидного винтового домкрата, состоящего из оснований домкрата, соединенных шарнирами в виде ромба, противоположные углы которых выполнены с возможностью сближения или расхождения под действием винтовой пары, причем одно основание домкрата зафиксировано относительно корпуса, а другое основание домкрата - относительно подвижного корпуса натяжного механизма, при этом винт винтовой пары домкрата соединен с электрическим приводом, позволяющим перемещать основание домкрата с подвижной частью натяжного механизма при ослаблении натяжения гибкого звена ниже выбранной величины усилия натяжения гибкого звена, определенным датчиком нагрузки, который функционально связан с блоком управления.
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2013 |
|
RU2522729C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА | 2014 |
|
RU2547674C1 |
| ПРИВОД СКВАЖИННОГО ШТАНГОВОГО НАСОСА (ВАРИАНТЫ) | 2001 |
|
RU2200876C1 |
| US 4916959 A, 17.04.1990 | |||
| СПОСОБ ОПРЕДЕЛЕНИЯ КОЭФФИЦИЕНТА ТЕПЛОПРОВОДНОСТИ ЖИДКОЙ ТЕПЛОВОЙ ИЗОЛЯЦИИ В НАТУРНЫХ УСЛОВИЯХ | 2015 |
|
RU2602595C1 |

