ОБЛАСТЬ ТЕХНИКИ, К КОТОРОЙ ОТНОСИТСЯ ИЗОБРЕТЕНИЕ
Настоящее изобретение относится к транспортным средствам с автоматически управляемыми сцеплениями и, в частности, к способу и системе для определения необходимости в адаптации точки контакта для сцепления в соответствии с преамбулой п. 1 формулы изобретения. Изобретение относится также к системе по п. 11 и транспортному средству по п. 14.
УРОВЕНЬ ТЕХНИКИ ИЗОБРЕТЕНИЯ
В транспортных средствах, как правило, встречаются различные конфигурации силовой передачи, например коробка передач может принимать форму управляемой вручную коробки передач или автоматической коробки передач. В случае тяжелых транспортных средств часто желательно, чтобы они имели как можно более удобный для водителя способ управления, что обычно влечет за собой автоматическое выполнение переключения передач в коробке передач посредством системы управления транспортного средства. В связи с этим коробки передач, которые автоматически переключают передачу, также становятся все более распространенными в тяжелых транспортных средствах.
Такое автоматическое переключение передач в тяжелых транспортных средствах часто осуществляется с помощью управления системой управления переключением передач в «ручных» коробках передач (называемых также АМТ - автоматизированная механическая трансмиссия) отчасти ввиду того, что они являются значительно менее дорогостоящими в изготовлении, а также ввиду их большего коэффициента полезного действия.
Коэффициент полезного действия автоматических коробок передач такого типа, часто предусматриваемых в автомобилях, слишком низок, чтобы оправдывать себя, за исключением, например, городских автобусов и развозных автомобилей, которым часто приходится останавливаться, а затем вновь трогаться с места.
Поэтому «ручные» коробки передач, которые автоматически переключают передачи, распространены в тяжелых транспортных средствах, главным образом, используемым на автострадах и автомагистралях национального значения.
Такое переключение передач может осуществляться различными способами, один из которых предусматривает использование автоматически управляемого сцепления для переключения передачи на более высокую/низкую, при этом водителю лишь необходим доступ к педали акселератора и педали тормоза.
В принципе, сцепление необходимо использовать лишь для приведения транспортного средства в движение из неподвижного состояния, поскольку другие переключения передач могут осуществляться системой управления транспортного средства вообще без использования сцепления в связи с тем, что они вместо этого осуществляются «безмоментно». Автоматически управляемое сцепление может также использоваться лишь для некоторых ступеней передачи либо лишь при переключении передачи на более высокую или низкую.
Однако для удобства и обеспечения возможности более быстрых переключений передач автоматически управляемое сцепление используется при всех или практически всех переключениях передачи на более высокую и низкую. На транспортных средствах с автоматическим сцеплением важно знать точку контакта сцепления (положение сцепления), т.е. положение, в котором сцепление начинает передавать крутящий момент.
Знание точки контакта, например, при трогании с места, остановке или переключении передачи транспортного средства обеспечивает системе управления знание положения сцепления, в котором начинается или заканчивается передача крутящего момента от двигателя к остальной части силовой передачи, поэтому приведение в движение и переключение передачи транспортного средства также может осуществляться таким образом, чтобы не вызывать неприемлемых рывков или неприемлемого износа силовой передачи.
Однако точка контакта не является фиксированным положением, а может изменяться, например, из-за износа сцепления. Она также может изменяться в тех случаях, когда транспортное средство не находится в движении, что означает, что даже если она определяется в начале поездки, нет никакой уверенности, что фактическая точка контакта на более поздней стадии поездки будет соответствовать точке контакта, определенной в начале.
Таким образом, существует потребность в усовершенствованном способе определения точки контакта транспортного средства.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Целью настоящего изобретения является предложение способа определения необходимости в адаптации точки контакта, который решает вышеуказанную проблему. Данная цель достигается с помощью способа по п. 1.
Настоящее изобретение относится к способу определения необходимости в адаптации точки контакта для сцепления транспортного средства, причем сцепление предназначено для избирательной передачи мощности привода между двигателем и по меньшей мере одним ведущим колесом. Данный способ включает в себя определение в первый момент времени первой температуры упомянутого сцепления и сравнение упомянутой первой температуры упомянутого сцепления со второй температурой, определяемой в другой момент времени, который предшествует упомянутому первому моменту времени. Считается, что имеется необходимость в адаптации точки контакта, когда упомянутая первая температура отличается от упомянутой второй температуры более чем на первое значение.
Положение точки контакта сцепления, т.е. положение сцепления, из которого может осуществляться передача крутящего момента между двигателем и коробкой передач, может сильно зависеть от температуры. Однако может оказаться сложным установить, насколько положение сцепления изменяется с температурой. Способ в соответствии с настоящим изобретением имеет преимущество, состоящее в том, что точка контакта сцепления может быть определена вновь, когда вероятно, что положение точки контакта, предполагаемое в системе управления транспортного средства на основе предшествующей адаптации точки контакта, не соответствует фактически существующей точке контакта.
В связи с этим такое определение выполняется, когда температура сцепления изменилась настолько, что следует ожидать, что точка контакта также изменилась в такой степени, что требуемые характеристики, относящиеся к выключению/включению сцепления, например, при переключении передач могут сохраняться. Другие характеристики настоящего изобретения и его преимущества указаны в изложенном ниже подробном описании вариантов осуществления и прилагаемых чертежах.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На фиг. 1a изображена силовая передача транспортного средства, в которой может использоваться настоящее изобретение.
На фиг. 1b изображен управляющий блок в системе управления транспортного средства.
На фиг. 2 изображена характеристика сцепления для сцепления, в которой может применяться настоящее изобретение.
На фиг. 3 изображен способ в соответствии с настоящим изобретением.
На фиг. 4 схематически изображена температурная зависимость точки контакта.
Фиг. 5 иллюстрирует еще один способ в соответствии с настоящим изобретением.
ПОДРОБНОЕ ОПИСАНИЕ ВАРИАНТОВ ОСУЩЕСТВЛЕНИЯ
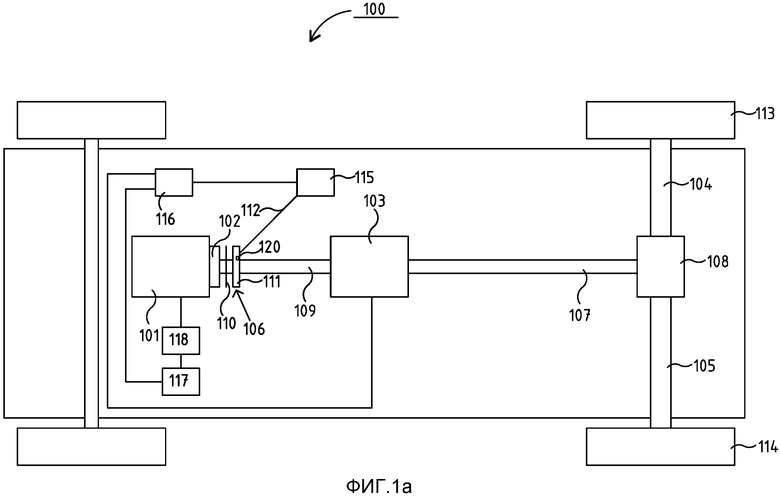
На фиг. 1a изображена силовая передача транспортного средства 100 в соответствии с одним вариантом осуществления настоящего изобретения. Транспортное средство 100, схематически изображенное на фиг. 1, имеет только одну ось, снабженную ведущими колесами 113, 114, но изобретение также применимо к транспортным средствам, в которых более чем одна ось снабжена ведущими колесами. Силовая передача содержит первый источник энергии в форме двигателя 101 внутреннего сгорания, который традиционным способом через выходной вал двигателя, обычно через маховик 102, соединяется с коробкой 103 передач с помощью 106 сцепления.
Сцепление 106 принимает форму автоматически управляемого сцепления и в данном варианте осуществления является дисковым, в результате чего фрикционный элемент (диск) 110, соединенный с первым элементом коробки передач, например входным валом 109 коробки 103 передач, избирательно входит в зацепление с маховиком 102 для передачи мощности привода от двигателя 101 к ведущим колесам 113, 114 через коробку 103 передач. Зацепление диска 110 сцепления с маховиком 102 двигателя осуществляется посредством нажимного диска 111, который является перемещаемым в сторону, например, посредством рычага 112, функция которого управляется приводом 115 сцепления. Само действие привода 115 сцепления на рычаг 112 управляется системой управления транспортного средства.
Системы управления в современных транспортных средствах обычно содержат систему шин связи, состоящую из одной или более шин связи для соединения друг с другом ряда электронных управляющих блоков (ECU), или контроллеров, и различные компоненты, расположенные на транспортном средстве. Такая система управления может включать в себя большое число управляющих блоков, при этом ответственность за конкретную функцию может быть разделена между двумя или более управляющими блоками.
Для упрощения на фиг. 1а показаны только управляющие блоки 116, 117, 118, но специалисты должны понимать, что транспортные средства рассматриваемого в настоящем документе типа часто имеют значительно большее число управляющих блоков.
Управляющий блок 116 управляет сцеплением 106 (приводом 115 сцепления) и коробкой 103 передач и в варианте осуществления, описываемом в настоящем изобретении, реализован в форме управляющего блока 117. Управляющий блок 117 может являться управляющим блоком, специально предназначенным для настоящего изобретения, но настоящее изобретение может быть также реализовано полностью или частично в одном или более других уже существующих управляющих блоков транспортного средства, например управляющем блоке 116 и/или управляющем блоке 118, которые в данном случае управляют двигателем 101 транспортного средства.
Осуществляемое управляющим блоком 116 управление приводом 115 сцепления и коробкой 103 передач также может зависеть не только от управляющего блока 117, но и, например, от информации, принимаемой от одного или более управляющих блоков, которые управляют функциями двигателя, а именно, в настоящем примере, управляющих блоков 116, 118.
Управляющие блоки рассматриваемого в настоящем документе типа обычно выполнены с возможностью приема сигналов датчиков от различных частей транспортного средства, например, управляющий блок 116 может принимать сигналы датчиков, соответствующие положению диска сцепления и/или рычага. Управляющий блок 117 может, например, принимать сигналы от управляющего блока 116, а также, например, от управляющего блока 118 двигателя. Управляющий блок может также принимать сигналы от одного или более датчиков 120 температуры, как описывается ниже. Управляющие блоки рассматриваемого в настоящем документе типа обычно также выполнены с возможностью доставки управляющих сигналов в различные части и компоненты транспортного средства. В настоящем примере управляющий блок 117 передает сигналы, например, в управляющий блок 116 во время адаптации точки контакта.
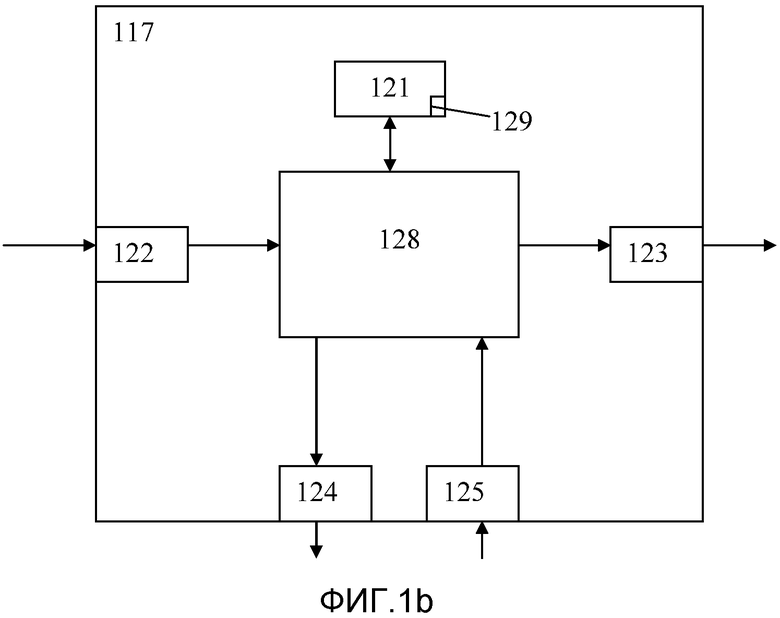
Управление часто осуществляется с помощью запрограммированных инструкций, как правило, в форме компьютерной программы, которая при исполнении в компьютере или управляющем блоке заставляет компьютер/управляющий блок осуществлять требуемые формы управляющего действия, например этапы способа в соответствии с настоящим изобретением. Компьютерная программа обычно выполнена в форме компьютерного программного продукта 129, который хранится на носителе 121 цифровых данных (см. фиг. 1b), например ПЗУ (постоянном запоминающем устройстве), ППЗУ (программируемом постоянном запоминающем устройстве), СППЗУ (стираемом программируемом постоянном запоминающем устройстве), флэш-памяти, ЭСППЗУ (электрически стираемом программируемом постоянном запоминающем устройстве), жестком диске и т.д., находящемся в управляющем блоке или соединенном с управляющим блоком, и которая исполняется управляющим блоком. Поэтому поведение транспортного средства в конкретной ситуации может изменяться путем изменения инструкций компьютерной программы.
На фиг. 1b схематически изображен пример управляющего блока (управляющего блока 117), возможно, содержащего вычислительный блок 128, который может быть выполнен в форме по существу любого типа процессора или микрокомпьютера, например схемы для цифровой обработки сигналов (цифрового сигнального процессора - DSP) или схемы с предварительно заданной конкретной функцией (специализированной интегральной микросхемы - ASIC). Вычислительный блок 128 соединен с блоком 121 памяти, который выдает ему, например, сохраненный программный код 129 и/или сохраненные данные, которые необходимы вычислительному блоку 128, чтобы он мог выполнять вычисления. Вычислительный блок 128 также выполнен с возможностью хранения промежуточных или окончательных результатов вычислений в блоке 121 памяти.
Управляющий блок 117 дополнительно снабжен соответствующими устройствами 122, 123, 124, 125 для приема и отправки входных и выходных сигналов. Эти входные и выходные сигналы могут содержать формы волны, импульсы или иные атрибуты, которые приемные устройства 122, 125 могут обнаруживать в качестве информации и которые могут быть преобразованы в сигналы, которые может обрабатывать вычислительный блок 128. Поэтому эти сигналы передаются в вычислительный блок 128. Устройства 123, 124 отправки выходного сигнала выполнены с возможностью преобразования сигналов, принимаемых с вычислительного блока 128, например, для их модуляции, для создания выходных сигналов, которые могут быть транспортированы в другие части системы управления транспортного средства и/или в компонент/компоненты, для которых предназначены эти сигналы. Каждое из соединений с соответствующими устройствами для приема и отправки входных и выходных сигналов может быть выполнено в форме одного или более из кабеля, информационной шины, например шины локальной сети контроллеров (CAN), шины MOST (Media Oriented Systems Transport) или какой-либо иной конфигурации шины, либо беспроводного соединения.
В соответствии с фиг. 1а транспортное средство 100 дополнительно содержит карданные валы 104, 105, которые соединяются с его ведущими колесами 113, 114 и приводятся в движение с помощью выходного вала 107 коробки 103 передач через шестерню 108 оси, например простой дифференциал.
При осуществлении переключения передачи в транспортном средстве 100, изображенном на фиг. 1а, сцепление 106 выключается приводом 115 сцепления, управляемым с помощью управляющего блока, другая шестерня входит в зацепление в коробке передач, и сцепление затем включается. Как упоминалось выше, при таких переключениях передач важно, чтобы система управления транспортного средства хорошо знала точку контакта сцепления, т.е. физическое положение, в котором диск сцепления соприкасается с маховиком и, следовательно, может начинать передачу крутящего момента между двигателем и остальной частью силовой передачи.
Знание положения точки контакта и, следовательно (на основе характеристики сцепления, как описывается ниже), знание крутящего момента, который сцепление может передавать в различных положениях, позволяет выполнять переключения передач тем способом, который не только является удобным для водителя, например, тем, что они могут происходить без неприемлемых рывков, но и экономным, поскольку он уменьшает ненужный износ силовой передачи. Процесс переключения передач также может быть ускорен тем, что во время него сцепление необязательно должно выключаться больше, чем это необходимо для освобождения сцепления от маховика, вместо того, чтобы использовать полное потенциальное перемещение рычага.
Точка контакта в данном описании и в формуле изобретения, изложенной ниже, означает не только физическое положение, в котором находится диск сцепления, когда он лишь физически соприкасается с маховиком (или с некоторым другим элементом, соединенным с выходным валом двигателя), т.е. точку, в которой сцепление начинает передавать крутящий момент, но и любое представление этого положения, поэтому точка контакта может, например, представлять собой положение рычага и/или привода сцепления в тот момент, когда диск сцепления лишь соприкасается с маховиком.
Определение точки контакта обычно осуществляется для нахождения точного положения, в котором сцепление начинает передавать крутящий момент. Это может, например, осуществляться любым из способов, описанных ниже.
Точка контакта не является фиксированным положением, а может изменяться, например, из-за износа сцепления с течением времени. Хотя износ сцепления в течение короткого периода может рассматриваться как незначительный, точка контакта может изменяться в процессе движения транспортного средства, что означает, что даже если она определяется в начале поездки, нет никакой уверенности, что фактическая точка контакта на более поздней стадии поездки будет соответствовать точке контакта, определенной в начале.
Поэтому адаптация точки контакта должна выполняться, когда положение точки контакта могло измениться и выйти за пределы ограничений, которые обусловливают достаточное удобство и достаточный отклик на крутящий момент.
В настоящем изобретении предлагается способ, который позволяет определять необходимость в адаптации точки контакта. Способ 300 в соответствии с настоящим изобретением иллюстрируется на фиг. 3. Он начинается на этапе 301 с определения, нужна ли оценка необходимости в адаптации точки контакта. Если это так, способ переходит на этап 302. Определение необходимости в адаптации точки контакта может, например, осуществляться непрерывно или через некоторые промежутки времени, например раз в секунду, раз в минуту или через какие-либо иные подходящие промежутки времени.
Точка контакта зависит, главным образом, от износа и температуры сцепления. Износ сцепления может считаться постоянным в течение короткого периода, например одной поездки транспортного средства, но температура сцепления может значительно изменяться.
На этапе 302 первая температура Т1 сцепления исходя из вышеизложенного определяется в форме представления ее фактической температуры. Эта температура Т1 может, например, определяться посредством одного или более датчиков температуры, связанных со сцеплением. Датчик температуры может, например, размещаться на блоке цилиндров двигателя вблизи маховика или на рычаге. Т1 может также являться температурой, измеряемой в каком-либо ином подходящем месте в транспортном средстве. Температура сцепления может определяться как температура, непосредственно измеряемая датчиком, или оцениваться, например, с помощью математической модели или таблицы.
Температура сцепления может, например, зависеть от мощности, передаваемой ей во время скольжения, температуры коробки передач, температур внешней среды транспортного средства, колебаний температуры двигателя в зависимости от нагрузки и т.д.
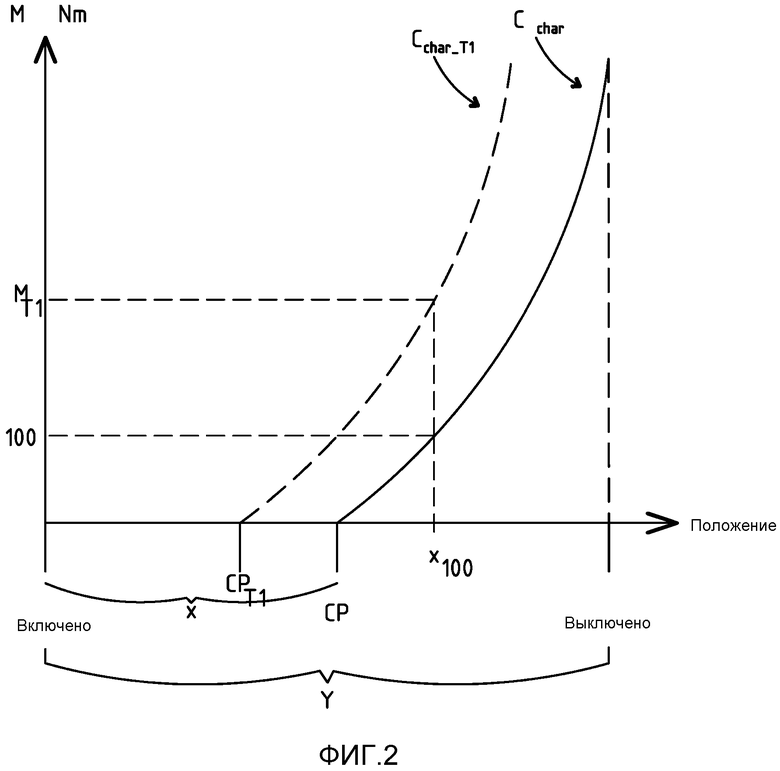
На фиг. 2 изображен пример характеристики для сцепления типа, к которому относится фиг. 1а. Ось y указывает крутящий момент, который может передавать сцепление между двигателем и силовой передачей, а ось x указывает положение сцепления (или, например, положение привода сцепления, как указано выше), при этом начало координат соответствует выключенному сцеплению, т.е. при диске сцепления (рычаге/приводе сцепления), находящемся в своем одном крайнем положении как можно левее в заданном масштабе, в то время как включенное положение соответствует положению на фиг. 1, в котором диск сцепления находится как можно левее, а сцепление (рычаг/привод сцепления) находится при этом в своем другом крайнем положении.
Диск сцепления, когда полностью выключен, обычно находится на расстоянии y от маховика двигателя, поэтому включение сцепления предполагает начальное перемещение диска сцепления на расстояние x перед фактическим физическим соприкосновением с маховиком. Как только диск сцепления соприкасается с маховиком, в точке СР контакта может начинаться передача крутящего момента между двигателем и остальной частью силовой передачи. Чем больше сцепление включается после этого (т.е., чем сильнее диск сцепления входит в зацепление с маховиком), тем больший крутящий момент может передаваться между двигателем и остальной частью силовой передачи.
Сколько именно крутящего момента может передаваться в каждой точке зависит от характеристики Cchar сцепления, которая может изменяться от сцепления к сцеплению и которая, как и точка контакта, должна оцениваться через равные интервалы. В настоящем документе не приводится какого-либо дополнительного описания такого оценивания характеристики сцепления. На фиг. 2 изображена характеристика Cchar сцепления при температуре сцепления в момент времени, когда транспортное средство трогается с места. Однако, как упоминалось выше, температура сцепления во время поездки не является постоянной, а в большей или меньшей степени изменяется, например, в зависимости от того, насколько часто происходят переключения передач, и от загруженности, эксплуатационных условий и условий окружающей среды. Трогание с места из неподвижного состояния также вносит существенный вклад в повышение температуры в сцеплении тем, что в такие моменты времени может иметься относительно продолжительный период скольжения сцепления.
Положение точки контакта СР сцепления сильно зависит от температуры, что означает, что во время поездки расстояние х на фиг. 2 изменяется с температурой.
Это показано пунктирной линией на фиг. 2, на которой представлена характеристика Cchar_T1 сцепления при температуре Т1 сцепления и положение СРТ1 точки контакта при температуре Т1, которая выше, чем температура для характеристики сцепления, представленной сплошной линией. Как видно на диаграмме, более высокая температура в данном случае означает, что точка контакта сцепления перемещается в направлении стрелки ближе к началу координат, т.е., ближе к полностью выключенному положению сцепления. Следовательно, точка контакта будет достигнута быстрее после включения сцепления, т.е. уже в положении СРТ1 вместо положения СР (соотношение может также быть противоположным, т.е. перемещение точки контакта дальше от полностью выключенного положения сцепления, в котором точка контакта будет достигнута на более позднем этапе включения сцепления).
Если система управления в данном случае не знает корректной точки контакта, но считает, что она находится в положении СР, то под действием, например, потребности во включении сцепления до положения, в котором через сцепление может быть передано 100 Нм, т.е. положения х100, вместо этого сцеплением будет передан значительно больший крутящий момент МТ1, способный привести к неприемлемым рывкам/колебаниям, а в наихудшем случае, к повреждению одного или более компонентов силовой передачи.
Поэтому желательно, чтобы система управления всегда обладала корректным знанием преобладающей точки контакта сцепления с тем, чтобы переключения передач могли осуществляться надлежащим образом.
Однако в соответствии с существующим уровнем техники определение точки контакта в основном выполняется только при запусках транспортного средства в тех ситуациях, когда транспортное средство неподвижно, и в некоторых ситуациях эксплуатации, в которых могут допускаться медленные переключения передач (т.е., длительные периоды на «нейтралке»). Однако основная проблема состоит в том, что транспортное средство может приводиться в движение таким образом, что адаптация точки контакта осуществляется только в тех случаях, когда транспортное средство запускается, поскольку при нахождении транспортного средства в движении возможность выполнения еще одной адаптации не появляется. Таким образом, транспортное средство может приводиться в движение круглосуточно без выполнения какой-либо иной адаптации и без учета существующих/изменившихся условий движения. Таким образом, поведение транспортного средства в течение некоторого дня, особенно при переключениях передач, может показаться водителю значительно изменяющимся без каких-либо видимых причин.
В соответствии с настоящим изобретением необходимость в адаптации точки контакта исходя из вышеизложенного определяется на основе температуры сцепления. Температура Т1, определяемая на этапе 302, сравнивается на этапе 303 со второй температурой Т2, предпочтительно измеряемой тем же датчиком температуры или тем же способом, что и Т1, но во время последней предыдущей адаптации точки контакта. Эта предыдущая адаптация точки контакта может, например, являться адаптацией, проводимой в начале поездки, как на фиг. 2, либо впоследствии.
Сравнение на этапе 303 позволяет определить, отклоняется ли Т1 от Т2 более чем на некоторое значение ΔТ. Отклонение означает, что Т1 может быть на ΔТ выше или на ΔТ ниже, чем Т2. При этом устанавливается, является ли |T2-T1|>ΔТ. Отклонение ΔТ может быть установлено равным некоторому значению, которое всегда является одинаковым, но также может быть выполнено с возможностью изменения, например, с температурой сцепления. Способ возвращается на этап 301, если |T2<T1|<ΔТ, но переходит на этап 304, если |T2-T1|>ΔТ.
Значение ΔТ может также регулироваться с помощью ожидаемого изменения точки контакта, т.е. являться значением, отражающим разность температур, которая может вызывать столь большое изменение точки контакта, что необходимо выполнять адаптацию точки контакта. На фиг. 4 изображен пример температурной зависимости сцепления. Ось x указывает температуру сцепления, определяемую, например, любым из способов, поясняемых выше примером, а ось y указывает на положение точки контакта, выражаемое через расстояние х, как на фиг. 2.
В приведенном примере положение точки контакта изменяется на значение вплоть до приблизительно 2 мм в зависимости от существующей температуры. Расстояние х на фиг. 2 изменяется от приблизительно 12 мм до приблизительно 10 мм во время изменений температуры между приблизительно 60° и 180°. Очевидно, что диапазон температур может значительно изменяться в зависимости от того, когда/как определяется/оценивается температура сцепления.
Хотя такая диаграмма может аппроксимироваться как практически линейная с помощью линии 401, дисперсия, тем не менее, будет значительной, как показано точками, соответствующими фактическим результатам адаптаций точки контакта. Как видно на фиг. 4, практически одна и та же температура может приводить к весьма различным точкам контакта, например точкам 402 и 403, в которых практически одна и та же температура приводит к большим различиям в расстоянии х в соответствии с фиг. 2. Таким образом, моделирование температурной зависимости точки контакта может оказаться сложным, и вычисление положения точки контакта на основе математической модели часто дает неправильные результаты.
Однако значение ΔТ может, например, определяться на основе модели ожидаемого изменения точки контакта как функции изменений температуры. Данная модель может, например, включать в себя линию 401 на фиг. 4 (хотя эта линия может быть совершенно различной и, например, совсем необязательно являться линейной). Данная модель может, например, иметь вид математического выражения или табличного представления.
ΔТ может, например, определяться как разность температур, которая для линии 401 на фиг. 4 вызывает некоторое смещение z расчетной точки контакта, например, на 0,1 мм (либо более короткое или более длинное расстояние).
Если на этапе 303 определяется, что существующая температура сцепления изменяется с ΔТ и что вследствие этого ожидается изменение точки контакта на расстояние z, способ переходит на этап 304 для требования адаптации точки контакта. Затем на этапе 305 способ завершается.
Так в соответствии с настоящим изобретением определяется необходимость в адаптации точки контакта. При этом такая адаптация может осуществляться при появлении соответствующей возможности. Поскольку она обычно требует выключения сцепления, часто нецелесообразно выполнять адаптацию, например, при переключении передачи на более высокую, когда переключения передач, возможно, должны осуществляться быстро.
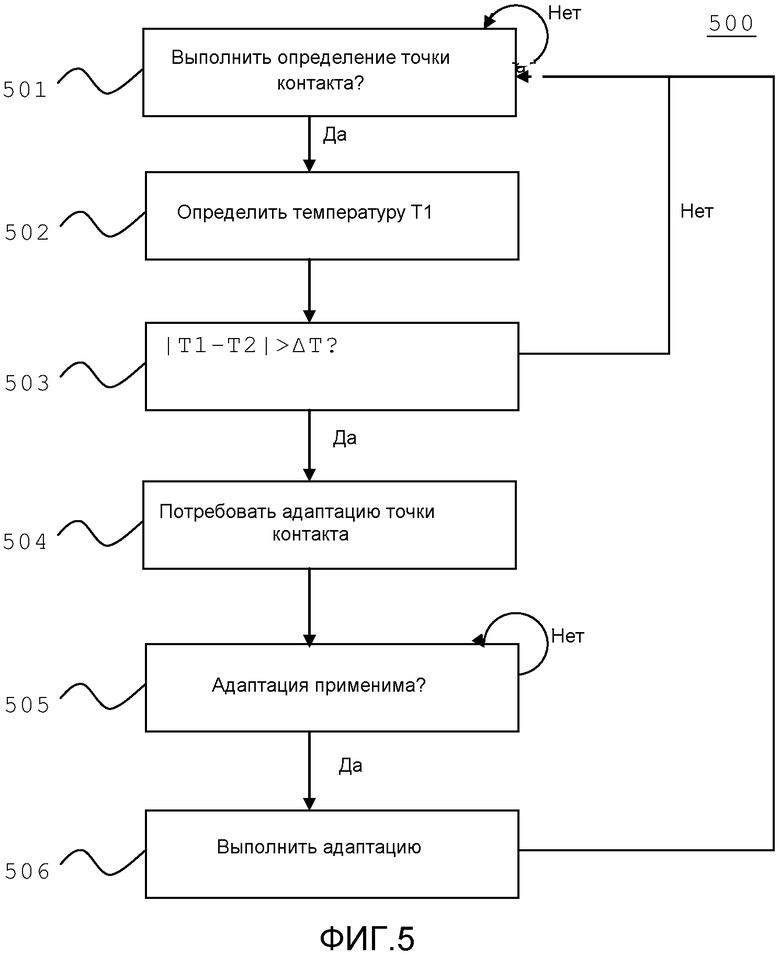
В соответствии с одним вариантом осуществления способ в соответствии с изобретением также включает в себя фактический процесс адаптации точки контакта. Примером этого является способ 500 на фиг. 5, в котором этапы 501-504 соответствуют этапам 301-304 на фиг. 3, но данный способ дополнительно включает в себя этап 505, когда считается, что требуется адаптация точки контакта, определения того, применима ли она, т.е. таковы ли существующие эксплуатационные условия транспортного средства, что определение точки контакта применимо. Способ может оставаться на этапе 505 до тех пор, пока не будет определено, что условия движения транспортного средства являются подходящими для выполнения адаптации точки контакта. Например, адаптация точки контакта не должна выполняться, когда транспортное средство находится на крутом подъеме, на котором по возможности необходимо избегать выключения сцепления. В случаях, когда такая адаптация применима, она может выполняться на этапе 506, после чего способ может завершаться или возвращаться на этап 501, чтобы определить, изменилась ли температура сцепления снова таким образом, что требуется еще одна адаптация точки контакта.
Для того, чтобы на транспортное средство не влияла оценка положения точки контакта, ее необходимо выполнять, когда коробка передач находится в нейтральном положении. Адаптация точки контакта может выполняться различными способами. В предшествующем уровне техники это обычно осуществляется, когда входной вал коробки передач неподвижен, путем перемещения 106 сцепления из выключенного положения во включенное положение, что позволяет определять положение, в котором входной вал начинает ускоряться. Точка контакта, например, определяется как положение, в котором датчик скорости вращения на входном вале коробки передач регистрирует скорость транспортного средства.
Однако время, требуемое для адаптации в соответствии с данным способом, может оказаться слишком продолжительным для того, чтобы она проходила незаметно, когда транспортное средство находится в движении. Отчасти это вызвано тем, что во многих случаях входному валу коробки передач требуется длительное время, чтобы остановиться, после того, как коробка передач переведена в нейтральное положение, особенно, если коробка передач нагрелась (что обычно означает, что имеется незначительное трение). В некоторых транспортных средствах этот процесс может быть ускорен с помощью, как правило, имеющегося распределительного вала, обычно соединенного с упомянутым входным валом, возможно, снабженным тормозом. Однако у многих транспортных средств такое средство отсутствует.
Может также оказаться сложным, в зависимости от типа датчика скорости, правильно обнаруживать низкие скорости вращения входного вала и, следовательно, фактическую точку контакта. Вместо этого устанавливается точка (положение), в которой находится сцепление, когда входной вал достигает скорости, обнаруживаемой датчиком.
Адаптация точки контакта может, например, также выполняться в соответствии с решением, описанным в заявке на патент Швеции SE 0950663-5, которое позволяет выполнять адаптацию точки контакта за более короткое время и, следовательно, в большем числе случаев при нахождении транспортного средства в движении, например, при переключении передач и во время торможения до остановки.
В SE 0950663-5 используется то обстоятельство, что крутящий момент MClutch, передаваемый сцеплением, может оцениваться как 

Входной вал коробки передач при переводе коробки передач в нейтральное положение ускоряется до требуемой скорости, например, посредством выходного вала коробки передач через сцепление 106, после чего следует оценивание коэффициента трения для собственного трения первого элемента коробки передач (например, входного вала коробки передач, включая диск сцепления, или входного вала коробки передач и распределительного вала).
Затем из выключенного положения сцепление 106 включается, вследствие чего передаваемый им крутящий момент, как описано выше, является функцией расчетного момента трения, а после включения сцепления передаваемый им крутящий момент определяется для множества ее положений. Точка контакта определяется как положение сцепления, в котором передаваемый им крутящий момент превышает первое значение, например ноль, т.е. MClutch>0.
В соответствии с настоящим изобретением первый элемент коробки передач может быть выполнен в форме любого набора компонентов, которым может придаваться вращение посредством сцепления и которые могут отсоединяться как от двигателя транспортного средства, так и от его ведущих колес, как указано выше, т.е. в форме части силовой передачи, которая может отсоединяться как от двигателя 101, так и от его ведущих колес 113, 114. При этом момент трения, оцениваемый, как указано выше, является моментом трения для совокупности компонентов.
Адаптация точки контакта может также осуществляться в соответствии со способом, описанным в параллельной заявке на патент Швеции, озаглавленный «Способ и система для определения точки контакта для сцепления», который имеет того же заявителя, изобретателя и дату регистрации, что и настоящая заявка, и в которой скорость двигателя регулируется таким образом, что после выключения сцепления она удерживается, как если бы сцепление было включено, что позволяет осуществлять определение точки контакта в большем числе случаев без причинения беспокойства водителю при нахождении транспортного средства в движении.
Другие варианты осуществления устройства в соответствии с изобретением упоминаются в прилагаемой формуле изобретения. Необходимо также отметить, что устройство может быть изменено в соответствии с различными вариантами осуществления способа в соответствии с изобретением (и наоборот) и что настоящее изобретение никоим образом не ограничивается описанными выше вариантами осуществления способа или устройства в соответствии с изобретением, а относится ко всем вариантам осуществления в пределах охраняемого объема прилагаемых независимых пунктов формулы изобретения.

Изобретение относится к транспортным средствам с автоматически управляемыми сцеплениями. В способе определения необходимости в адаптации точки контакта для сцепления транспортного средства определяют в первый момент времени первую температуру упомянутого сцепления. Затем сравнивают первую температуру со второй температурой, определяемой во второй момент времени и определяют необходимость в адаптации точки контакта, когда упомянутая первая температура отличается от упомянутой второй температуры более чем на первое значение. Система для реализации способа содержит средство для определения первой температуры сцепления, средство для сравнения упомянутой первой температуры со второй температурой упомянутого сцепления и средство для определения необходимости в адаптации точки контакта. Повышается точность определения. 3 н. и 12 з.п. ф-лы, 5 ил.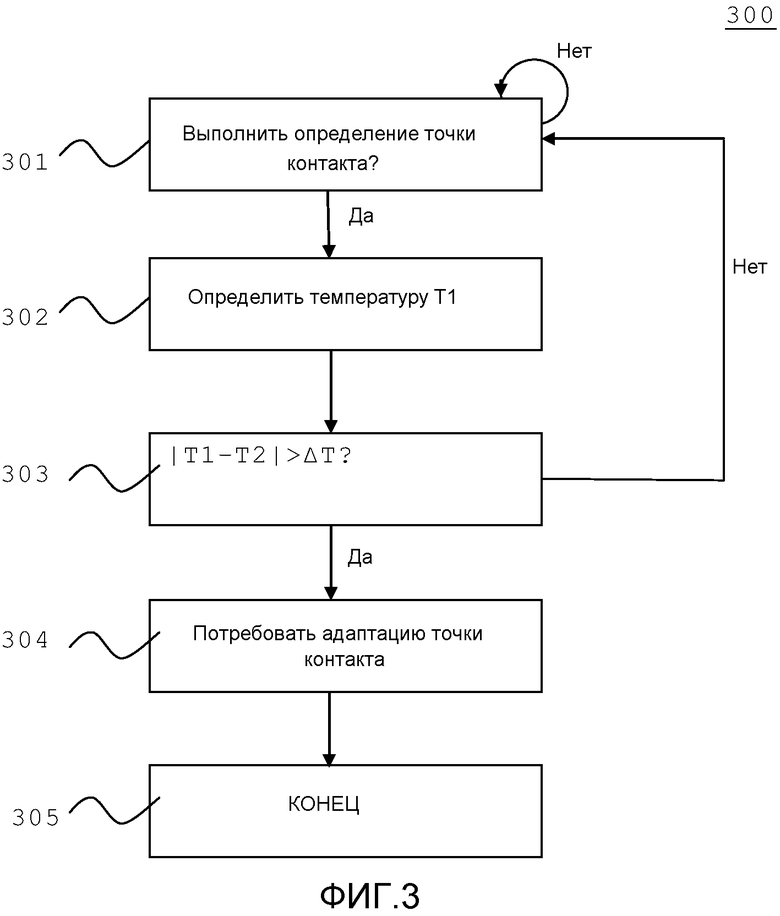
1. Способ определения необходимости в адаптации точки контакта для сцепления (106) транспортного средства (100) таким образом, что упомянутое сцепление (106) предназначено для передачи мощности привода между первым источником энергии в форме двигателя (101) и по меньшей мере одним ведущим колесом (113, 114) и таким образом, что данный способ содержит
- определение в первый момент времени первой температуры (Т1) упомянутого сцепления (106),
- сравнение упомянутой первой температуры (Т1) со второй температурой (Т2) упомянутого сцепления (106), определяемой во второй момент времени, который предшествует упомянутому первому моменту времени, и
- определение необходимости в адаптации точки контакта, когда упомянутая первая температура (Т1) отличается от упомянутой второй температуры (Т2) более чем на первое значение (ΔT).
2. Способ по п. 1, в котором упомянутая вторая температура (Т2) является температурой, определяемой в случае адаптации точки контакта.
3. Способ по п. 1 или 2, в котором упомянутое первое значение (ΔT) определяется посредством представления положения точки контакта как функции температуры.
4. Способ по п. 1 или 2, в котором необходимость в адаптации точки контакта определяется, когда расчетное положение точки контакта как функция температуры изменяется более чем на первое расстояние.
5. Способ по п. 1 или 2, в котором упомянутое первое значение (ΔТ) зависит от упомянутой первой температуры (Т1) и/или второй температуры (Т2).
6. Способ по п. 1 или 2, в котором упомянутое первое значение (ΔT) определяется как разность температур, предположительно вызывающая первое смещение z упомянутой точки контакта.
7. Способ по п. 1 или 2, дополнительно содержащий определение упомянутой первой температуры (Т1) на основе температуры, измеряемой датчиком (120) или посредством математической модели или таблицы.
8. Способ по п. 1 или 2, дополнительно содержащий
- выполнение адаптации точки контакта, когда упомянутая первая температура (Т1) отличается от упомянутой второй температуры (Т2) более чем на упомянутое первое значение (ΔT).
9. Способ по п. 8, дополнительно содержащий управление частотой вращения упомянутого двигателя (101) во время упомянутой адаптации точки контакта таким образом, чтобы поддерживать ее выше частоты вращения на холостом ходу упомянутого двигателя (101).
10. Способ по п. 8, в котором коробка (103) передач, расположенная между упомянутым сцеплением (106) и упомянутыми ведущими колесами (113, 114), содержит по меньшей мере первый элемент (109) коробки передач, соединенный с упомянутым сцеплением (106) и отсоединяемый от упомянутых ведущих колес (113, 114), причем данный способ, во время упомянутой адаптации точки контакта в случае, когда упомянутый первый элемент (109) коробки передач отсоединен от упомянутых ведущих колес (113, 114) и сцепление находится в выключенном положении, когда упомянутый первый элемент (109) коробки передач вращается, содержит оценку момента трения для упомянутого первого элемента (109) коробки передач, причем крутящий момент, передаваемый сцеплением (106), является функцией упомянутого расчетного момента трения,
- этап, когда упомянутый первый элемент (109) коробки передач вращается, включения упомянутого сцепления (106) из упомянутого выключенного положения, во время которого представление крутящего момента, передаваемого сцеплением (106), определяется путем использования упомянутого расчетного момента трения для множества положений упомянутого сцепления (106),
- определение упомянутой точки контакта посредством упомянутого представления упомянутого передаваемого крутящего момента,
- дополнительно содержащий этап (402), перед включением упомянутого сцепления (106), ускорения упомянутого первого элемента (109) коробки передач, если его скорость находится ниже второго значения.
11. Способ по п. 9, в котором коробка (103) передач, расположенная между упомянутым сцеплением (106) и упомянутыми ведущими колесами (113, 114), содержит по меньшей мере первый элемент (109) коробки передач, соединенный с упомянутым сцеплением (106) и отсоединяемый от упомянутых ведущих колес (113, 114), причем данный способ, во время упомянутой адаптации точки контакта в случае, когда упомянутый первый элемент (109) коробки передач отсоединен от упомянутых ведущих колес (113, 114) и сцепление находится в выключенном положении, когда упомянутый первый элемент (109) коробки передач вращается, содержит оценку момента трения для упомянутого первого элемента (109) коробки передач, причем крутящий момент, передаваемый сцеплением (106), является функцией упомянутого расчетного момента трения,
- этап, когда упомянутый первый элемент (109) коробки передач вращается, включения упомянутого сцепления (106) из упомянутого выключенного положения, во время которого представление крутящего момента, передаваемого сцеплением (106), определяется путем использования упомянутого расчетного момента трения для множества положений упомянутого сцепления (106),
- определение упомянутой точки контакта посредством упомянутого представления упомянутого передаваемого крутящего момента,
- дополнительно содержащий этап (402), перед включением упомянутого сцепления (106), ускорения упомянутого первого элемента (109) коробки передач, если его скорость находится ниже второго значения.
12. Система для определения необходимости в адаптации точки контакта для сцепления (106) транспортного средства (100), причем сцепление (106) предназначено для передачи мощности привода между первым источником энергии в форме двигателя (101) и по меньшей мере одним ведущим колесом (113, 114), отличающаяся тем, что содержит
- средство для определения в первый момент времени первой температуры (Т1) упомянутого сцепления (106),
- средство для сравнения упомянутой первой температуры (Т1) со второй температурой (Т2) упомянутого сцепления (106), определяемой во второй момент времени, который предшествует упомянутому первому моменту времени, и
- средство для определения необходимости в адаптации точки контакта, когда упомянутая первая температура (Т1) отличается от упомянутой второй температуры (Т2) более чем на первое значение (ΔT).
13. Система по п. 12, отличающаяся тем, что она дополнительно содержит по меньшей мере один датчик (120) температуры, который связан с упомянутым сцеплением (106) или расположен в каком-либо ином подходящем месте и который выполнен с возможностью определения упомянутой первой температуры (Т1).
14. Система по п. 12 или 13, отличающаяся тем, что она содержит коробку (103) передач, расположенную между упомянутым сцеплением (106) и упомянутыми ведущими колесами (113, 114).
15. Транспортное средство (100), отличающееся тем, что оно снабжено системой по любому из пп. 12-14.
| JP 2005273875 A, 06.10.2005 | |||
| WO 03016743 A1, 27.02.2003; | |||
| US 5993352 A, 30.11.1999 |

