Область техники
Настоящее изобретение относится к системам для приведения транспортного средства в движение и, в частности, к системам для приведения в движение транспортного средства при неблагоприятных условиях поверхности движения. В частности, настоящее изобретение относится к способу в соответствии с ограничительной частью п.1 формулы изобретения. Изобретение также относится к системе по п.12 и транспортному средству по п.14 формулы изобретения.
Уровень техники
Известно, что транспортные средства вообще и тяжелые транспортные средства в частности могут застревать, когда пытаются стронуться с места, в случае неблагоприятных условий поверхности движения. Такие неблагоприятные условия поверхности движения могут представлять собой, например, снег или другие мягкие поверхности движения, такие как песок, грунт и т.п.
Когда транспортное средство должно трогаться в таких условиях, оно обычно находится в ситуации, когда одно или более приводных колес застревают в рытвине или ухабе, при этом крутящий момент двигателя (движущая сила), прикладываемый для приведения в движение транспортного средства, может вызывать буксование приводных колес, прежде чем они выходят из рытвины/ухаба, что приводит к тому, что рытвина/ухаб становится еще глубже и, соответственно, еще больше затрудняет выезд из нее.
Для того чтобы попытаться высвободить транспортное средство при возникновении таких ситуаций, часто используют один или более «проверенных» методов. Например, может быть использована система пневматической подвески транспортного средства, и/или поднимают неведущие задние дополнительные мосты, чтобы увеличить нагрузку на приводные колеса и тем самым облегчить их сцепление с поверхностью движения. Другим общеизвестным методом, часто используемым в случае именно таких рытвин/ухабов, является процесс раскачивания, при котором водитель пытается высвободить транспортное средство раскачиванием, увеличивая силу, прикладываемую к приводным колесам, предпочтительно, при включенной относительно высокой передаче, так что они свободно вращаются, после чего водитель отпускает педаль акселератора и отключает сцепление, так что транспортное средство катится назад, затем данную процедуру повторяют, когда непрерывное движение в противоположном направлении прекращено. Продолжая таким образом раскачивать транспортное средство, можно в конце концов обеспечить достаточную силу, для того чтобы вытащить транспортное средство из рытвины/ухаба.
Поскольку тяжелые транспортные средства обладают высоким располагаемым крутящим моментом, даже на холостом ходу функция раскачивания часто может быть осуществлена посредством использования только сцепления, при этом движущая сила прикладывается к приводным колесам водителем, отпускающим педаль сцепления и затем быстро нажимающим на нее, когда приводные колеса начинают вращаться, так что транспортное средство может скатываться назад вниз в и вверх на противоположную сторону рытвины/ухаба. Когда перемещение в противоположном направлении прекращено, опять может быть использовано сцепление для приложения движущей силы к приводным колесам, когда транспортное средство снова начинает перемещаться в первоначальном направлении, чтобы тем самым постараться достигнуть более высокой скорости, чем в предыдущей попытке, с возможностью выехать из рытвины/ухаба. При этом процесс (раскачивание) повторяют до тех пор, пока транспортное средство не высвободится из рытвины/ухаба или не выяснится необходимость в дополнительной помощи.
Тяжелые транспортные средства все чаще оборудуют автоматически приводимыми в действие коробками передач. Однако данные коробки передач обычно представляют собой не автоматические коробки передач в обычном смысле, а скорее «механические» коробки передач, в которых управление переключением передачи осуществляется посредством системы управления, отчасти потому что механические коробки передач значительно дешевле в изготовлении, а также потому что они более эффективные.
Водитель использует педаль сцепления для приведения в движение транспортного средства с места, а все другие переключения передач могут быть осуществлены посредством системы управления транспортным средством вообще без участия сцепления. Зато переключения передач осуществляются «без момента», т.е. крутящий момент, получаемый от двигателя, регулируется до требуемого уровня, чтобы уменьшить крутящий момент, передаваемый в точках зацепления соответствующих шестерен. Таким образом, при использовании трансмиссий данного типа водитель имеет доступ к педали сцепления, которую он/она может также использовать для выполнения упомянутой функции раскачивания.
Тем не менее, транспортные средства с коробкой передач упомянутого типа также обычно оборудованы полностью автоматически управляемым сцеплением, при этом водитель имеет доступ только к педали акселератора и педали тормоза. В начале движения, как обычно, в транспортном средстве, оборудованном автоматически управляемым сцеплением, система управления транспортным средством будет полностью отключать сцепление, когда водитель нажимает педаль акселератора. Тогда сцепление не будет включаться до тех пор, пока водитель не нажмет на тормоз и скорость двигателя не снизится до скорости холостого хода. Недостаток этого состоит в том, что во время процесса раскачивания момент инерции двигателя, пока сцепление не включается, будет тормозить скатывание назад транспортного средства, таким образом уменьшая эффект функции раскачивания и, в худшем случае, препятствуя успешному началу движения транспортного средства.
Таким образом, по меньшей мере в некоторых ситуациях существует потребность в усовершенствованном способе приведения в движение транспортных средств с автоматически управляемыми сцеплениями в тех случаях, когда транспортное средство застревает.
Краткая сущность изобретения
Задачей настоящего изобретения является создание способа управления транспортным средством, когда оно начинает движение, который решает упомянутую проблему. Данная задача решается посредством способа по п.1 формулы изобретения.
Настоящее изобретение относится к способу управления автоматически управляемым сцеплением при приведении в движение транспортного средства по поверхности движения, при этом транспортное средство содержит двигатель внутреннего сгорания для генерирования движущей силы, предназначенной для передачи на по меньшей мере одно приводное колесо, и дроссельный регулятор для востребования движущей силы от упомянутого двигателя, причем величина движущей силы, востребованной от двигателя, регулируется водителем транспортного средство посредством упомянутого дроссельного регулятора. Упомянутый способ включает этап, когда удовлетворяется первый критерий оценки сцепления упомянутых приводных колес с упомянутой поверхностью движения, отключения упомянутого автоматически управляемого сцепления, если водитель использует дроссельный регулятор для уменьшения потребности в движущей силе от двигателя.
Преимущество этого состоит в том, что двигатель может быть отсоединен от остальной части трансмиссии, как только водитель уменьшает потребность в движущей силе, при этом другое преимущество состоит в том, что когда, например, водитель пытается привести в движение транспортное средство из рытвины/ухаба и приводные колеса утрачивают свое сцепление с дорогой, момент инерции двигателя, когда двигатель отсоединен от остальной части трансмиссии в результате отключения сцепления, не будет оказывать влияния на изменение направления вращения приводных колес, которое имеет место в том случае, когда транспортное средство начинает скатываться обратно в рытвину/ухаб, таким образом может быть также получен максимальный эффект от скатывания обратно.
Дополнительные характеристики настоящего изобретения и его преимущества показаны посредством приведенного ниже подробного описания вариантов осуществления и прилагаемых чертежей.
Краткое описание чертежей
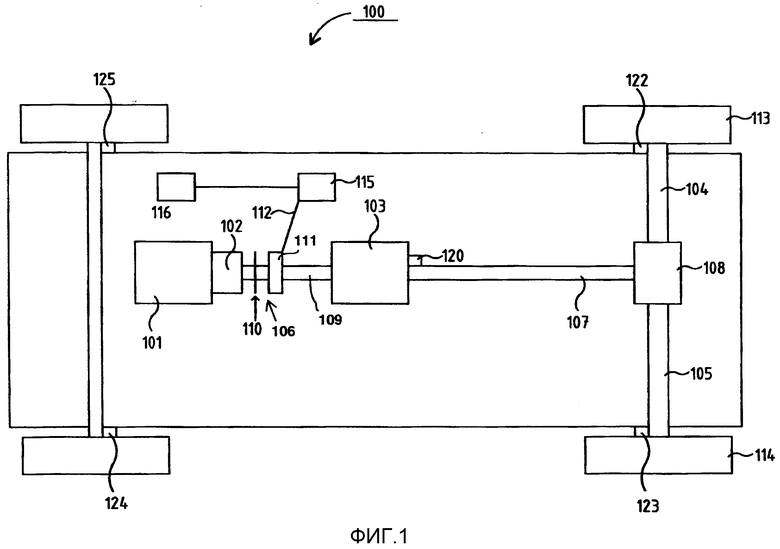
Фиг.1 - вид трансмиссии транспортного средства, с которой может быть успешно использовано настоящее изобретение.
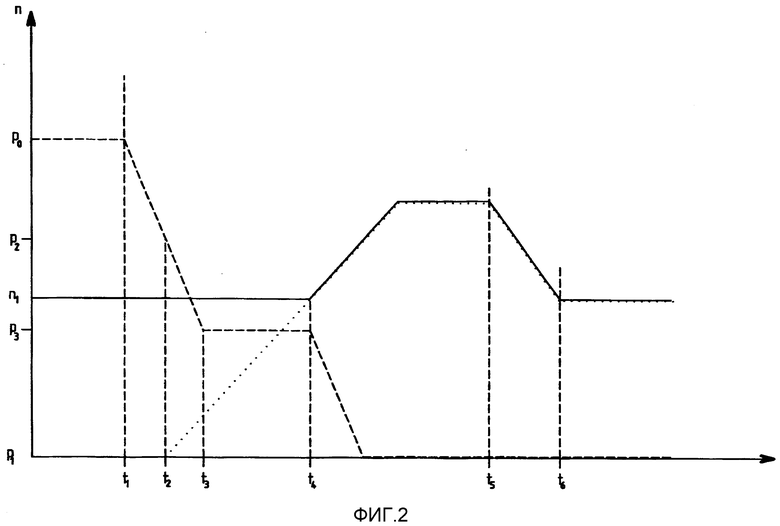
Фиг.2 - функционирование сцепления в соответствии с известным уровнем техники.
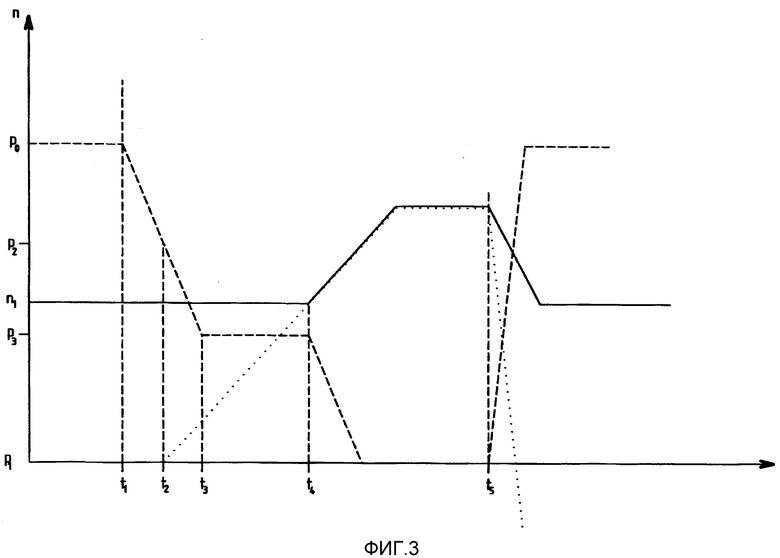
Фиг.3 - пример функционирования сцепления в соответствии с настоящим изобретением.
Фиг.4 - пример способа в соответствии с настоящим изобретением.
Подробное описание вариантов осуществления изобретения
Как упомянуто выше, водителю транспортного средства с автоматическим сцеплением трудно надлежащим образом осуществлять функцию раскачивания, поскольку он/она не способен/способна непосредственно влиять на процесс посредством педали сцепления.
Настоящее изобретение решает данную проблему посредством использования способа, в котором в отличие от известного уровня техники водитель способен влиять на отключение/включение сцепления требуемым способом несмотря на отсутствие педали сцепления.
На фиг.1 показан пример трансмиссии в транспортном средстве 100 в соответствии с первым вариантом осуществления настоящего изобретения. Транспортное средство 100, схематично показанное на фиг.1, содержит только один мост с приводными колесами 113, 114, однако изобретение также применимо в транспортных средствах, в которых предусмотрено более одного моста с приводными колесами. Трансмиссия содержит двигатель 101 внутреннего сгорания, соединенный обычным способом с коробкой 103 передач посредством сцепления 106.
Транспортное средство дополнительно содержит ведущие валы 104, 105, которые соединены с приводными колесами 113, 114 транспортного средства и приводятся в движение посредством выходного вала 107 из коробки 103 передач через шестерню 108 оси, например обычный дифференциал. Сцепление 106 дискового типа, в котором фрикционный элемент (диск) 110, соединенный с первым элементом коробки передач, например входным валом 109 коробки 103 передач, селективно входит в контакт с маховиком 102 двигателя с возможностью передачи движущей силы от двигателя 101 внутреннего сгорания на приводные колеса 113, 114 через коробку 103 передач. Контакт диска 110 сцепления с выходным валом двигателя регулируется посредством прижимной пластины 111, которая выполнена с возможностью бокового перемещения, например, посредством рычага 112, функция которого регулируется приводом 115 сцепления. Влияние привода 115 сцепления на рычаг 112 регулируется системой управления транспортным средством.
В современных транспортных средствах системы управления транспортным средством обычно состоят из систем шин связи, состоящих из одной или более шин связи для соединения друг с другом некоторого количества электронных блоков управления (ЭБУ), или контроллеров, и различных элементов, расположенных на транспортном средстве. Система управления данного типа может содержать большое количество блоков управления, и ответственность за конкретную функцию может быть разделена между двумя или более блоками управления. Для упрощения на фиг.1 показан только один такой блок 116 управления, который управляет сцеплением (приводом 115 сцепления). В действительности управление приводом 115 сцепления посредством блока 116 управления будет зависеть, например, от информации, которую получают, например, из одного или более дополнительных блоков управления.
Способ в соответствии с настоящим изобретением может быть с успехом реализован в виде компьютерной программы, которая содержит программный код и которая, когда упомянутый программный код выполняется в блоке управления, вынуждает упомянутый блок управления осуществлять способ в соответствии с изобретением. Компьютерная программа может храниться в машиночитаемом носителе, например в любом из категории, которая включает в себя постоянное запоминающее устройство (ПЗУ), программируемое постоянное запоминающее устройство (ППЗУ), стираемое программируемое постоянное запоминающее устройство (СППЗУ), флэш-память, электрически стираемое программируемое постоянное запоминающее устройство (ЭСППЗУ) и накопитель на жестком диске.
В случае транспортного средства с механическим переключением передач или некоторых типов упомянутых автоматически приводимых в действие «механических» коробок передач управление приводом сцепления, прямо или опосредованно, осуществляется водителем посредством педали сцепления (непоказанной) взамен автоматического управления посредством упомянутой системы управления. Эти и подобные типы коробок передач часто используются в тяжелых транспортных средствах, в которых сцепление должно быть использовано только при приведении в движение транспортного средства, поскольку, когда транспортное средство движется, последующее переключение передач будет осуществляться автоматически, без отключения сцепления, посредством согласования крутящего момента и скорости выходного вала двигателя с крутящим моментом и скоростью входного вала коробки передач. Таким образом, в транспортном средстве данного типа водитель может при необходимости также еще использовать сцепление для осуществления требуемой функции раскачивания.
В отличие от этого при использовании транспортного средства типа, показанного на фиг.1, в котором управление сцеплением полностью автоматическое и, соответственно, педаль сцепления для водителя недоступна, ручное раскачивание является нелегкой задачей. Даже если бы это можно было надлежащим образом осуществить, например, посредством отпускания педали акселератора и приведения рычага переключения передач в нейтральное положение, чтобы позволить транспортному средству катиться в противоположном направлении, с последующим повторным включением передачи и нажатием педали акселератора, в этом случае водителю будет труднее осуществлять требуемую функцию раскачивания, и поэтому несколько попыток, которые потребуются для осуществления обратного качения, будут приводить к менее гармоничному раскачиванию.
Настоящее изобретение решает данную проблему посредством изменения способа управления сцеплением во время раскачивания по сравнению со способом, которым оно осуществляется при нормальном вождении транспортного средства. На фиг.2 схематично показано нормальное функционирование сцепления для автоматически управляемого сцепления.
Непрерывная линия на фиг.2 изображает скорость двигателя, пунктирная линия - скорость вращения входного вала коробки передач, а прерывистая линия - положение сцепления. Ось y показывает скорость вращения для непрерывной и пунктирной линий, а также величину перемещения диска сцепления. Когда транспортное средство нормально трогается с места, двигатель будет работать со скоростью n1 холостого хода, и сцепление будет находиться в своем полностью отключенном положении p0. Положение p0 представляет собой полностью отключенное сцепление, положение p1 - полностью включенное сцепление, и положение p2 - точку контакта сцепления, т.е. этап, на котором диск сцепления начинает входить в контакт с выходным валом двигателя, чтобы таким образом начать передавать крутящий момент (движущую силу) через сцепление.
В момент t=t1 начинается приведение в движение транспортного средства посредством сцепления, начинающего включаться. Когда в момент t=t2 диск сцепления достигает положения p2, входной вал коробки передач начинает вращаться. Затем сцепление приближается к положению p3, в котором оно включается до такой степени, чтобы обеспечить передачу максимального крутящего момента, который способен выдавать двигатель при скорости n1 холостого хода. Данное положение сцепления, которое достигнуто при t=t3, сохраняется до момента t=t4, когда входной вал коробки передач достигает скорости n1 холостого хода, и, таким образом, проскальзывание в сцеплении уже отсутствует. В момент t=t4 скорость двигателя начинает увеличиваться, при этом одновременно сцепление полностью включается и транспортное средство ускоряется до скорости двигателя, которая эквивалентна движущей силе, востребованной водителем (например, посредством использования педали акселератора).
Если затем, при t=t5, водитель отпускает педаль акселератора, транспортное средство будет тормозиться двигателем, при включенном сцеплении, до скорости n1 холостого хода, см. t=t6. Когда скорость двигателя достигает скорости n1 холостого хода, она будет поддерживаться, при включенном сцеплении, пока иная скорость не будет востребована водителем (тяжелые транспортные средства обычно способны выдавать такой высокий крутящий момент при скорости холостого хода, что последняя может поддерживаться даже на по меньшей мере некотором уровне подъема дороги). Сцепление, вместо того чтобы оставаться включенным в момент t=t6, может в качестве альтернативы отключаться. Однако сцепление, остающееся включенным, имеет преимущество в том, что двигатель будет продолжать выдавать энергию движения, что может быть предпочтительным, например, когда транспортное средство стоит в очереди, так что оно будет двигаться вперед без необходимости для водителя удерживать свою ногу на педали акселератора.
Для сравнения, в соответствии с настоящим изобретением способ управления сцеплением изменяется, когда, например, возникает функция раскачивания.
Способ 400 в соответствии с изобретением проиллюстрирован в качестве примера на фиг.4, а способ работы сцепления в соответствии с изобретением проиллюстрирован на фиг.3, на котором функционирование сцепления точно соответствует фиг.2 до момента t5. Когда возникает ситуация раскачивания (этап 401) и водитель нажимает педаль акселератора, пытаясь выехать из рытвины/ухаба, и продолжает нажимать на нее до тех пор, пока колеса не начинают вращаться, после чего он/она будет отпускать педаль акселератора (этап 402). Вместо снижения скорости двигателя посредством торможения двигателем до скорости холостого хода, как на фиг.2, сцепление будет сразу отключаться в соответствии с изобретением (этап 403), когда водитель отпускает педаль акселератора. Сцепление предпочтительно отключается по возможности быстро, моментально отсоединяя двигатель от остальной части трансмиссии. Преимущество этого состоит в том, что момент инерции двигателя не будет оказывать влияния на изменение направления вращения приводных колес, которое имеет место в том случае, когда транспортное средство начинает скатываться обратно в рытвину/ухаб, поэтому может быть также получен максимальный эффект от скатывания обратно. Это проиллюстрировано на чертеже посредством скорости входного вала коробки передач, которая быстро снижается и становится отрицательной, когда транспортное средство начинает двигаться в противоположном направлении.
Когда транспортное средство достигло и подошло в упор к противоположной стороне рытвины/ухаба, водитель снова нажимает педаль акселератора, после чего сцепление включается и крутящий момент прикладывается к упомянутым приводным колесам. Таким образом, в соответствии с настоящим изобретением, водитель несмотря на отсутствие педали сцепления способен раскачивать транспортное средство посредством использования педали акселератора точно так же, как это раньше можно было осуществлять посредством педали сцепления.
Вместо использования для раскачивания транспортного средства педали акселератора могут быть использованы другие типы дроссельных регуляторов, например кнопка, приводимая в движение рукой, или рычаг, закрепленный на приборной панели.
Таким образом, настоящее изобретение используется в ситуации, в которой существует потребность в раскачивании. Оценить наличие потребности в раскачивании можно разными способами. Например, она может быть определена автоматически системой управления, определяющей, что приводные колеса транспортного средства вращаются, а его неприводные колеса - нет.
Данная оценка может быть осуществлена, например, посредством датчика 120 на выходном валу коробки передач (см. фиг.1), при этом сигнал, выдаваемый датчиком 120, будет характеризовать скорость вращения выходного вала. В качестве альтернативы может быть использован один или более датчиков 122-125 скорости колес (например, чтобы обеспечить по возможности точную оценку, могут быть предусмотрены датчики скорости для всех колес транспортного средства).
В данной ситуации система управления может быть выполнена с возможностью активации функции раскачивания и, предпочтительно, информирования об этом водителя, например посредством активации сигнальной лампочки, или выдачи звукового сигнала, или каким-либо другим пригодным способом. Тогда водитель будет знать, как будет работать транспортное средство при отпущенной педали акселератора. Система управления транспортным средством может быть дополнительно выполнена с возможностью определения момента, когда уже нет необходимости в раскачивании, например посредством определения, что неприводные колеса транспортного средства вращаются по существу с такой же скоростью, как и его приводные колеса, или что неприводные колеса достигли некоторой заданной скорости. В этом случае функция сцепления может быть выполнена с возможностью автоматического возврата к «нормальной работе».
Вместо системы управления, автоматически определяющей потребность в раскачивании, режим раскачивания может быть приспособлен для активации водителем, например посредством нажатия кнопки или посредством введения соответствующего сигнала, например, через человеко-машинный интерфейс. Однако автоматическое обнаружение потребности имеет преимущество в том, что режим раскачивания не нужно активировать вручную, поскольку данное обнаружение будет осуществляться автоматически, обеспечивая раскачивание в соответствии с необходимостью, при этом одновременно транспортное средство будет работать совершенно как обычно, когда существует нормальная ситуация вождения.
Автоматическое обнаружение потребности в раскачивании может быть также осуществлено другими способами помимо сравнения скорости вращения неприводных и приводных колес. Например, может быть определено увеличение скорости вращения приводных колес со временем (посредством датчика 120 и/или датчиков 120 и/или 121), и если данное увеличение скорости вдруг заметно повышается, то можно предположить, что приводные колеса утратили контакт с поверхностью движения и что, соответственно, возникла потребность в раскачивании. В качестве альтернативы можно считать, что существует ситуация раскачивания, если скорость вращения упомянутых приводных колес достигла от неподвижного состояния в течение некоторого периода времени начальной скорости, которая не может быть достигнута по-другому за такое короткое время.
Вместо педали акселератора, которая должна быть полностью отпущена для отключения сцепления в соответствии с настоящим изобретением, в одном варианте осуществления сцепление будет отключаться моментально, как только водитель отпускает педаль акселератора, с последующим уменьшением требуемой движущей силы.
В соответствии с другим альтернативным вариантом осуществления достаточно отпустить педаль акселератора в достаточной степени, например, в пределах некоторой части ее диапазона перемещения, например в пределах десятой, пятой, третьей или четвертой части диапазона перемещения, причем данное положение является ближайшим к предельному положению, при котором движущая сила не востребована водителем.
Кроме того, в одном варианте осуществления сцепление будет отключаться по возможности быстро, чтобы тем самым как можно быстрее уменьшить влияние момента инерции двигателя на скатывание обратно. Однако сцепление может быть приспособлено для отключения при меньшей скорости двигателя по сравнению с максимальной, которая может быть достигнута посредством системы управления, хотя сцепление также должно отключаться «быстро».
Изобретение относится к системам приведения в движение транспортного средства. Способ управления автоматически управляемым сцеплением при приведении в движение транспортного средства включает этап, на котором, когда удовлетворяется первый критерий для оценки сцепления приводных колес с поверхностью движения, отключают автоматически управляемое сцепление, отсоединяя двигатель от остальной части трансмиссии, если водитель использует дроссельный регулятор для уменьшения потребности в движущей силе от двигателя. Система для реализации способа содержит средства для удовлетворения первого критерия оценки сцепления приводных колес с поверхностью движения, для отключения автоматически управляемого сцепления, если водитель использует дроссельный регулятор для уменьшения потребности в движущей силе от двигателя. Решение направлено на самостоятельное движение застрявшего ТС. 3 н. и 10 з.п. ф-лы, 4 ил. 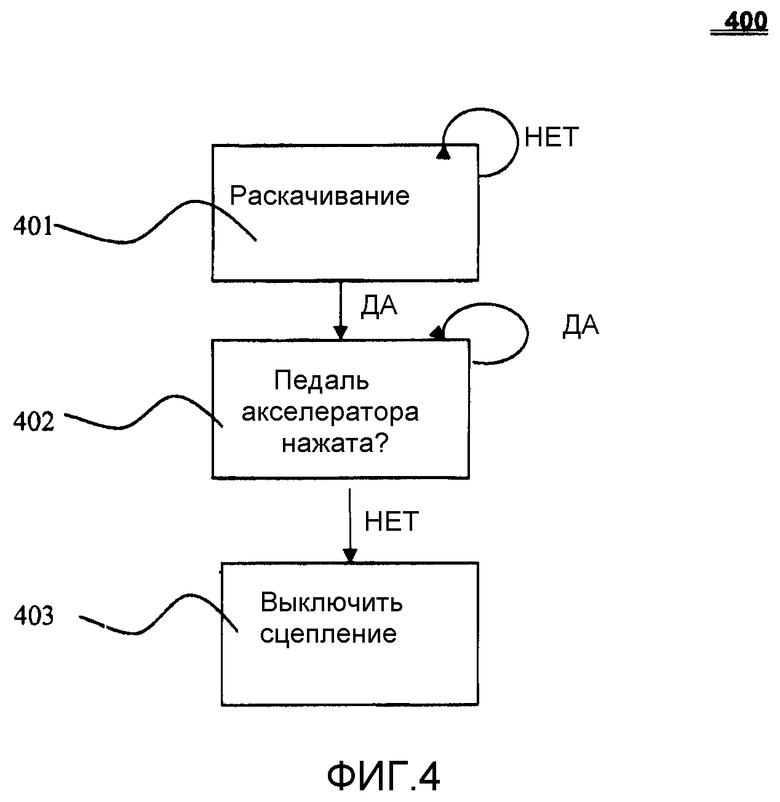
1. Способ управления автоматически управляемым сцеплением при приведении в движение транспортного средства по поверхности движения, причем транспортное средство содержит двигатель внутреннего сгорания для генерирования движущей силы, предназначенной для передачи на, по меньшей мере, одно приводное колесо, и дроссельный регулятор для востребования движущей силы от двигателя, при этом величину движущей силы, востребованной от двигателя, регулирует водитель транспортного средства посредством дроссельного регулятора, отличающийся тем, что он включает этап:
когда удовлетворяется первый критерий для оценки сцепления приводных колес с поверхностью движения, отключения автоматически управляемого сцепления, отсоединяя двигатель от остальной части трансмиссии, если водитель использует дроссельный регулятор для уменьшения потребности в движущей силе от двигателя.
2. Способ по п.1, отличающийся тем, что первый критерий представляет собой определение, не утратили ли приводные колеса своего сцепления с поверхностью движения.
3. Способ по п.1 или 2, отличающийся тем, что первый критерий представляет собой определение, достигла ли скорость вращения приводных колес начальной скорости.
4. Способ по п.1 или 2, отличающийся тем, что первый критерий представляет собой определение, удовлетворяет ли разница скоростей вращения между приводными колесами и, по меньшей мере, одним неприводным колесом транспортного средства второму критерию.
5. Способ по п.1 или 2, отличающийся тем, что оценка сцепления с поверхностью движения представляет собой определение изменения скорости вращения приводных колес с течением времени.
6. Способ по п.1 или 2, отличающийся тем, что дроссельной регулятор приводят в движение между первым предельным положением и вторым предельным положением, причем потребность в движущей силе зависит от положения дроссельного регулятора.
7. Способ по п.6, отличающийся тем, что при снятии давления средство отдачи возвращает дроссельный регулятор в первое предельное положение.
8. Способ по п.7, отличающийся тем, что сцепление отключают, когда перемещение педали акселератора по направлению к первому предельному положению достигает точки, в которой дроссельный регулятор находится на расстоянии не больше первоначального расстояния от первого предельного положения.
9. Способ по п.6, отличающийся тем, что сцепление отключают, когда перемещение педали акселератора по направлению к первому предельному положению достигает точки, в которой дроссельный регулятор находится на расстоянии не больше первоначального расстояния от первого предельного положения.
10. Способ по п.1 или 2, отличающийся тем, что дроссельный регулятор представляет собой педаль акселератора.
11. Система для управления автоматически управляемым сцеплением при приведении в движение транспортного средства по поверхности движения, при этом транспортное средство содержит двигатель внутреннего сгорания для генерирования движущей силы, предназначенной для передачи на, по меньшей мере, одно приводное колесо, и дроссельный регулятор для востребования движущей силы от двигателя, причем величина движущей силы, востребованной от двигателя, регулируется водителем транспортного средства посредством дроссельного регулятора, отличающаяся тем, что
она содержит средства, когда удовлетворяется первый критерий оценки сцепления приводных колес с поверхностью движения, для отключения автоматически управляемого сцепления, с отсоединением двигателя от остальной части трансмиссии, если водитель использует дроссельный регулятор для уменьшения потребности в движущей силе от двигателя.
12. Система по п.11, отличающаяся тем, что дроссельный регулятор приводится в движение между первым предельным положением и вторым предельным положением, причем потребность в движущей силе зависит от положения дроссельного регулятора.
13. Транспортное средство, отличающееся тем, что оно содержит систему по п.11 или 12.
| JPH 11173348 A, 29.06.1999 | |||
| EP 1345607 A2, 10.09.2003 | |||
| СПОСОБ ПОЛУЧЕНИЯ КАПСУЛ ЭТОПОЗИДА | 1990 |
|
RU2008899C1 |
| УСТРОЙСТВО И СПОСОБ ОПРЕДЕЛЕНИЯ ТОЧКИ КАСАНИЯ МУФТЫ СЦЕПЛЕНИЯ | 1994 |
|
RU2199448C2 |

