Изобретение относится к автомобилю, содержащему коробку передач, устройство для управления автоматическим сцеплением в цепи привода, исполнительный узел для регулирования передаваемого сцеплением крутящего момента, управляемый блоком управления, который находится в сигнальной связи с датчиками и, при необходимости, другими электронными устройствами, например через сигнальные провода и/или шину данных, причем блок управления вычисляет или определяет пробуксовывание сцепления в зоне фрикционных накладок и посредством пробуксовывания сцепления и с помощью передаваемого сцеплением крутящего момента определяет ввод энергии в зону фрикционных накладок сцепления, и/или определяет повышение температуры фрикционных накладок относительно задаваемого предельного значения, и/или определяет повышенный износ фрикционных накладок.
Такие автомобили известны, например, из DE-OS 4011850 и DE-OS 19602006. При неправильном пользовании автоматическим сцеплением, например при остановке автомобиля на подъеме без нажатия тормоза или при трогании с места на не предназначенной для этого передаче, может возникнуть повышенный ввод энергии в зону фрикционных накладок из-за повышенного пробуксовывания сцепления. За счет этого повышенного пробуксовывания температура фрикционных накладок сцепления может сильно возрасти, что может привести к их повышенному износу и, возможно, также к разрушению.
В автомобиле из DE-OS 4011850 при превышении мощности трения сцепление включается или выключается. Неожиданное для водителя выключение или включение сцепления приводит при выключении к разъединению цепи привода, в результате чего автомобиль не может больше ускоряться. При определенных обстоятельствах это может привести к возникновению опасных ситуаций, когда стоящий автомобиль в случае опасности не может больше двигаться.
В автомобиле из DE-OS 19602006 для предупреждения водителя, например, о слишком высокой температуре или слишком сильном износе, происходит управление изменяющимся по времени, передаваемым сцеплением крутящим моментом, что приводит к дерганию автомобиля. Этот изменяющийся по времени, передаваемый сцеплением крутящий момент вызывает непрерывную работу исполнительного узла для управления передаваемым крутящим моментом, если водитель не реагирует на предупредительные сигналы дергания. Из-за этой непрерывной работы исполнительный узел может нежелательным образом подвергаться, например, очень высокой тепловой нагрузке.
Задачей изобретения является создание описанного выше автомобиля с устройством для управления автоматическим сцеплением в цепи привода, у которого функция предупреждения водителя реализована, например, при слишком сильном вводе энергии или высокой температуре фрикционных накладок, и тем не менее нагрузка на исполнительный узел, например тепловая, уменьшается или сводится к минимуму.
Далее задачей изобретения является создание описанного выше автомобиля с устройством для управления автоматическим сцеплением, которое по сравнению с известными устройствами согласно уровню техники имеет повышенную эксплуатационную надежность.
Это достигается согласно изобретению за счет того, что при повышенном по сравнению с предельным значением вводе энергии или при повышенной по сравнению с предельным значением температуре и/или при повышенном по сравнению с предельным значением износе блок управления на первой временной фазе с продолжительностью t1 управляет передаваемым сцеплением крутящим моментом (момент сцепления) независимо от влияния имеющегося ввода энергии, затем на второй временной фазе с продолжительностью t2 управляет передаваемым сцеплением крутящим моментом с изменением по времени, например в виде импульсов, а на третьей временной фазе с продолжительностью t3 повышает передаваемый сцеплением крутящий момент до тех пор, пока частота вращения двигателя не будет ниже порогового значения. Это имеет то преимущество, что на первой временной фазе целенаправленно выжидается отрезок времени и водителю предоставляется возможность самому справиться с критической ситуацией, прежде чем на последующих временных фазах сработает управление. В течение второй временной фазы осуществляется "мягкое" предупреждение за счет дергания, причем на третьей временной фазе предупреждение за счет дергания заметно более ощутимо. Согласно другой идее изобретения предпочтительно, если по истечении третьей временной фазы с продолжительностью t3 или в течение нее при достижении порогового значения nMОT_SCH частоты вращения двигателя снова начинают первую временную фазу с продолжительностью t1.
В другом выполнении согласно изобретению целесообразно, если по истечении третьей временной фазы с продолжительностью t3 или в течение нее при достижении порогового значения nMCT_SCH частоты вращения двигателя продолжают вторую временную фазу с продолжительностью t2.
Также целесообразно, если, по меньшей мере, отдельные продолжительности t1, t2 и/или t3 могут быть заданы блоком управления с возможностью изменения или постоянными.
Также предпочтительно, если, по меньшей мере, отдельные продолжительности t1, t2 и/или t3 могут быть выбраны блоком управления в зависимости от передачи. За счет этого продолжительность временных фаз может быть выбрана с возможностью изменения.
Также может быть целесообразным, если отдельные продолжительности t1, t2 и/или t3 уменьшаются до нуля. Это может осуществляться, например, в зависимости от передачи. Выбранные с возможностью изменения, например выбираемые в зависимости от передачи, продолжительности могут быть определены, например, из характеристических полей или посредством характеристик.
Предпочтительно, если в течение второй временной фазы до истечения продолжительности t2 преждевременно закончить вторую временную фазу, когда предварительно выбранная частота вращения на входе коробки передач достигает задаваемого порогового значения nGET_SCH или превышает его.
Далее целесообразно, если пороговое значение nMCT_SCH равно пороговому значению nGET_SCH.
Также предпочтительно, если пороговое значение nGET_SCH отличается от порогового значения nGET_SCH.
В другом выполнении изобретения целесообразно, если, по меньшей мере, пороговое значение nMCT_SCH и/или пороговое значение nGET_SCH выбирают с помощью блока управления, например в зависимости от передачи.
Изобретение поясняется на примере с помощью чертежей, на которых изображено: на фиг.1 - схематично автомобиль; на фиг.2 и 3 - диаграммы.
На фиг.1 схематично изображен автомобиль 1 с приводным узлом, таким как мотор или ДВС. Далее в цепи привода автомобиля изображены система 3 передачи крутящего момента и коробка 4 передач. В этом примере выполнения система 3 расположена в силовом потоке между мотором и коробкой передач, причем момент привода мотора передается через систему 3 на коробку передач, а от коробки 4 передач - с ведомой стороны на вторичный вал 5 и на расположенный за ним мост 6, а также на колеса 6а. Сцепление 3 может быть также расположено за коробкой передач.
Система 3 передачи крутящего момента выполнена в виде сцепления, такого как фрикционное сцепление, сухое фрикционное сцепление, многодисковое сцепление, электромагнитное порошковое сцепление или сцепление для блокирования гидротрансформатора, причем сцепление может быть выполнено в виде сцепления с автоматической регулировкой рабочего зазора и компенсацией износа. Система передачи крутящего момента может быть выполнена далее в виде сцепления, включаемого при трогании автомобиля с места, и/или поворотного сцепления для реверсирования направления вращения, и/или предохранительного сцепления с целенаправленно управляемым крутящим моментом. Система передачи крутящего момента может быть сухим или мокрым фрикционным сцеплением, работающим, например, в жидкости. Она может быть также преобразователем крутящего момента.
Коробка 4 передач изображена в виде ручной ступенчатой коробки передач. В соответствии с идеей согласно изобретению коробка передач может быть также выполнена в виде автоматической ступенчатой коробки передач, которая может автоматически включаться посредством, по меньшей мере, одного актора. Под автоматической ступенчатой коробкой передач ниже следует понимать автоматическую коробку передач, включаемую с прерыванием силы тяги, причем процесс переключения для изменения передаточного числа происходит с управлением посредством, по меньшей мере, одного актора. Также может найти применение автоматическая коробка передач, которая представляет собой коробку передач, в основном, без прерывания силы тяги во время процессов переключения и которая, как правило, образована ступенями планетарной коробки передач. Кроме того, может быть использована бесступенчатая коробка передач, например коробка передач с охватом конического шкива ремнем. У коробки передач передача или передаточное число может быть включено из множества передач или передаточных чисел.
Система 3 передачи крутящего момента содержит ведущую 7 и ведомую 8 стороны, причем крутящий момент передается с ведущей стороны 7 на ведомую сторону 8 путем приложения усилия к ведомому диску 3а посредством нажимного диска 3b, тарельчатой пружины 3с, подшипника 3е выключения сцепления и маховика 3d. Для этого рычаг 20 выключения сцепления приводят в действие посредством исполнительного узла, такого как актор 13b.
Управление системой 3 передачи крутящего момента происходит посредством блока 13 управления, такого как контроллер, который может включать в себя управляющую электронную схему 13а и актор 13b. В другом предпочтительном выполнении актор и управляющая электронная схема могут быть также расположены в двух разных конструктивных элементах, таких как корпуса.
Блок 13 управления может содержать управляющую и силовую электронику для управления электродвигателем 12 актора 13b. За счет этого можно, например, предпочтительным образом достичь того, что системе потребуется в качестве единственного конструктивного пространства конструктивное пространство для актора с электроникой. Актор состоит из приводного двигателя 12, такого как электродвигатель, причем электродвигатель 12 воздействует на передающий цилиндр 11 через передачу, такую как червячная передача, или цилиндрическая зубчатая передача, или кривошипно-шатунный механизм, или передача с ходовым винтом. Это воздействие на передающий цилиндр может осуществляться непосредственно или через рычажный механизм.
Движение выходной части актора, такой как поршень 11а передающего цилиндра, регистрируется датчиком 14 перемещений сцепления, который регистрирует позицию, или положение, или скорость, или ускорение величины, пропорциональной соответственно позиции, или положению включения, или скорости, или ускорению сцепления. Передающий цилиндр 11 связан с приемным цилиндром 10 через трубопровод 9 для напорной среды, такой как гидропровод. Выходной элемент 10а приемного цилиндра взаимодействует с рычагом или средством 20 выключения сцепления, так что при движении выходной части 10а приемного цилиндра 10 средство 20 выключения сцепления также движется или опрокидывается, управляя передаваемым сцеплением 3 крутящим моментом.
Актор 13b для управления передаваемым крутящим моментом системы 3 передачи крутящего момента может быть выполнен с возможностью приведения в действие напорной средой, т. е. он может быть оборудован работающими на напорной среде передающим и приемным цилиндрами. Напорной средой может быть, например, гидравлическая жидкость или пневматическая среда. Приведение в действие работающего на напорной среде передающего цилиндра может осуществляться с помощью электродвигателя, причем электродвигатель 12 может иметь электронное управление. Приводным элементом актора 13b может быть, помимо приводного элемента с электродвигателем, также другой приводной элемент, например приводимый в действие напорной средой. Для регулирования положения элемента могут также использоваться магнитные акторы.
У фрикционного сцепления управление передаваемым крутящим моментом осуществляется за счет того, что прижатие фрикционных накладок ведомого диска между маховиком 3d и нажимным диском 3b происходит целенаправленно. Посредством положения средства 20 выключения сцепления, такого как вилка или центральный выключающий орган, можно целенаправленно управлять приложением усилия к нажимному диску или фрикционным накладкам, причем нажимной диск при этом движется между двумя конечными положениями и может быть произвольно остановлен и фиксирован. Одно конечное положение соответствует полностью включенному сцеплению, а другое - полностью выключенному. Для управления передаваемым крутящим моментом, который, например, меньше, чем мгновенный момент двигателя, можно управлять, например, положением нажимного диска 3b, находящегося между двумя конечными положениями. Сцепление может быть фиксировано в этом положении путем целенаправленного управления средством 20 выключения. Можно управлять также передаваемыми моментами сцепления, которые определенно выше мгновенного момента двигателя. В таком случае можно передавать актуальные моменты двигателя, причем неравномерности крутящего момента в цепи привода в виде, например, пиков, демпфируются и/или изолируются.
Для управления или регулирования системы передачи крутящего момента и, в частности, передаваемого сцеплением крутящего момента используются датчики, которые, по меньшей мере, временно контролируют основные величины всей системы и подают необходимые для управления величины состояния, сигналы и данные измерений, обрабатываемые блоком управления, причем может быть предусмотрена или может существовать сигнальная связь с другими электронными блоками, такими как, например, электронное устройство 50 управления двигателем или электронное устройство управления противоблокировочной системой 60 или противопробуксовочной системой. Датчики регистрируют, например, частоту вращения, такую как частоту вращения колес, частоту вращения двигателя, положение нагрузочного рычага, положение дроссельной заслонки, включенную передачу коробки передач, намечаемое переключение и другие специфичные для автомобиля параметры. Сигнальная связь между отдельными блоками 13, 50 и, например, 60 осуществляется через шину данных, например CAN-шину.
На фиг.1 видно, что использованы датчик 15 положения дроссельной заслонки, датчик 16 частоты вращения двигателя и таходатчик 17, которые передают контроллеру данные измерений или информацию. Электронное устройство блока 13а управления, такое как компьютер, обрабатывает входные величины системы и подает к актору 13б управляющие сигналы.
Коробка передач выполнена в виде ступенчатой коробки передач, причем ступени переключают переключающим рычагом или коробкой передач управляют этим переключающим рычагом. На рычаге управления ручной ступенчатой коробки передач, таком как переключающий рычаг 18, установлен, по меньшей мере, один датчик 19б, который регистрирует намечаемое переключение и/или включенную передачу и подает сигнал к блоку управления. С коробкой передач шарнирно соединен датчик 19а, который регистрирует включенную передачу и/или намечаемое переключение. Обнаружение намечаемого переключения с использованием, по меньшей мере, одного из обоих датчиков 19а, 19b может осуществляться за счет того, что датчик представляет собой датчик силы, который регистрирует силу, действующую на переключающий рычаг. Датчик может быть также выполнен в виде датчика перемещений или положения, причем блок управления по изменению сигнала положения обнаруживает намечаемое переключение.
Контроллер, по меньшей мере, временно находится в сигнальной связи со всеми датчиками и оценивает сигналы датчиков и входные величины системы таким образом, что в зависимости от актуальной рабочей точки блок управления подает, по меньшей мере, к одному актору команды управления или регулирования. Приводной элемент 12 актора, такой как электродвигатель, получает от блока управления, который управляет приведением в действие сцепления, управляющую величину в зависимости от данных измерений, и/или входных величин системы, и/или сигналов присоединенной сенсорики. Для этого в контроллер встроена управляющая программа в виде аппаратного и/или программного средства, которая оценивает входящие сигналы и на основе сравнений и/или функций, и/или характеристических полей рассчитывает или определяет выходные величины.
В контроллер 13 встроен предпочтительным образом блок определения крутящего момента, блок определения включенной передачи, блок определения пробуксовывания сцепления и/или блок определения рабочих состояний или он находится в сигнальной связи, по меньшей мере, с одним из этих блоков. Эти блоки могут быть встроены за счет управляющих программ как аппаратное и/или программное средство, так что с помощью входящих сигналов датчиков можно определить крутящий момент приводного узла 2 автомобиля 1, включенную передачу коробки 4 передач, пробуксовывание, имеющееся в зоне системы передачи крутящего момента, и актуальное рабочее состояние автомобиля. Блок определения включенной передачи регистрирует на основе сигналов датчиков 19а, 19b включенную в данный момент передачу. При этом датчики шарнирно соединены с переключающим рычагом и/или с исполнительными средствами коробки передач, такими как, например, центральный вал управления переключением передач или шток вилки переключения передач, и регистрируют, например, положение и/или скорость этих конструктивных элементов.
Далее на нагрузочном рычаге 30, таком как педаль акселератора, может быть расположен датчик 31, регистрирующий положение нагрузочного рычага. Другой датчик 32 может действовать как выключатель холостого хода, т.е. при нажатой педали акселератора, такой как нагрузочный рычаг, этот выключатель 32 холостого хода включен, а при отпущенной педали он выключен, так что за счет этой цифровой информации можно обнаружить, нажат ли нагрузочный рычаг, такой как педаль акселератора. Датчик 31 нагрузочного рычага регистрирует степень его нажатия.
На фиг.1, помимо педали 30 акселератора, такой как нагрузочный рычаг, и связанных с ней датчиков, изображен тормозной исполнительный элемент 40 для приведения в действие рабочего или стояночного тормоза, такой как тормозная педаль, ручной тормозной рычаг или ручной или ножной исполнительный элемент стояночного тормоза. На исполнительном элементе 40 установлен, по меньшей мере, один датчик 41, контролирующий его нажатие. Датчик 41 выполнен, например, в виде цифрового датчика, такого как выключатель, причем он регистрирует, нажат ли исполнительный элемент или нет. С этим датчиком в сигнальной связи может находиться сигнальное устройство, такое как фонарь сигнала торможения, которое сигнализирует о нажатии тормоза. Это может осуществляться как для рабочего, так и для стояночного тормоза. Датчик может быть выполнен, однако, и в виде аналогового датчика, причем такой датчик, например потенциометр, определяет степень нажатия исполнительного элемента. Также этот датчик может находиться в сигнальной связи с сигнальным устройством.
Блок управления может осуществлять управление с разомкнутым управляющим контуром с адаптацией или без нее. В другом примере выполнения может осуществляться регулирование с замкнутым регулирующим контуром с обратной связью. Точно так же может быть предусмотрен способ управления, включающий в себя этап управления с адаптацией и этап регулирования.
На фиг. 1, следовательно, схематично изображен автомобиль 1, содержащий коробку 4 передач, устройство управления автоматическим сцеплением 3 в цепи привода, управляемый блоком 13 управления исполнительный узел, такой как актор или актуатор, для регулирования передаваемого сцеплением 3 крутящего момента, причем блок 13 управления находится в сигнальной связи с датчиками и, при необходимости, с другими электронными устройствами, например, через сигнальные провода и/или шину данных, рассчитывает значения или определяет пробуксовывание сцепления в зоне фрикционных накладок и посредством пробуксовывания сцепления, а также с помощью передаваемого сцеплением 3 крутящего момента определяет ввод энергии в зону фрикционных накладок сцепления, и/или определяет повышение температуры фрикционных накладок относительно задаваемого предельного значения, и/или определяет повышенный износ фрикционных накладок, причем при повышенном по сравнению с предельным значением вводе энергии, или при повышенной по сравнению с предельным значением температуре, и/или при повышенном по сравнению с предельным значением износе блок управления на первой временной фазе с продолжительностью t1 управляет передаваемым моментом сцепления независимо от ввода энергии, затем на второй временной фазе с продолжительностью t2 управляет передаваемым сцеплением крутящим моментом с изменением по времени, например, в виде импульсов, а на третьей временной фазе с продолжительностью t3 повышает передаваемый сцеплением крутящий момент до тех пор, пока частота вращения двигателя не будет ниже порогового значения nMOT_SCH или пока не истечет продолжительность t3.
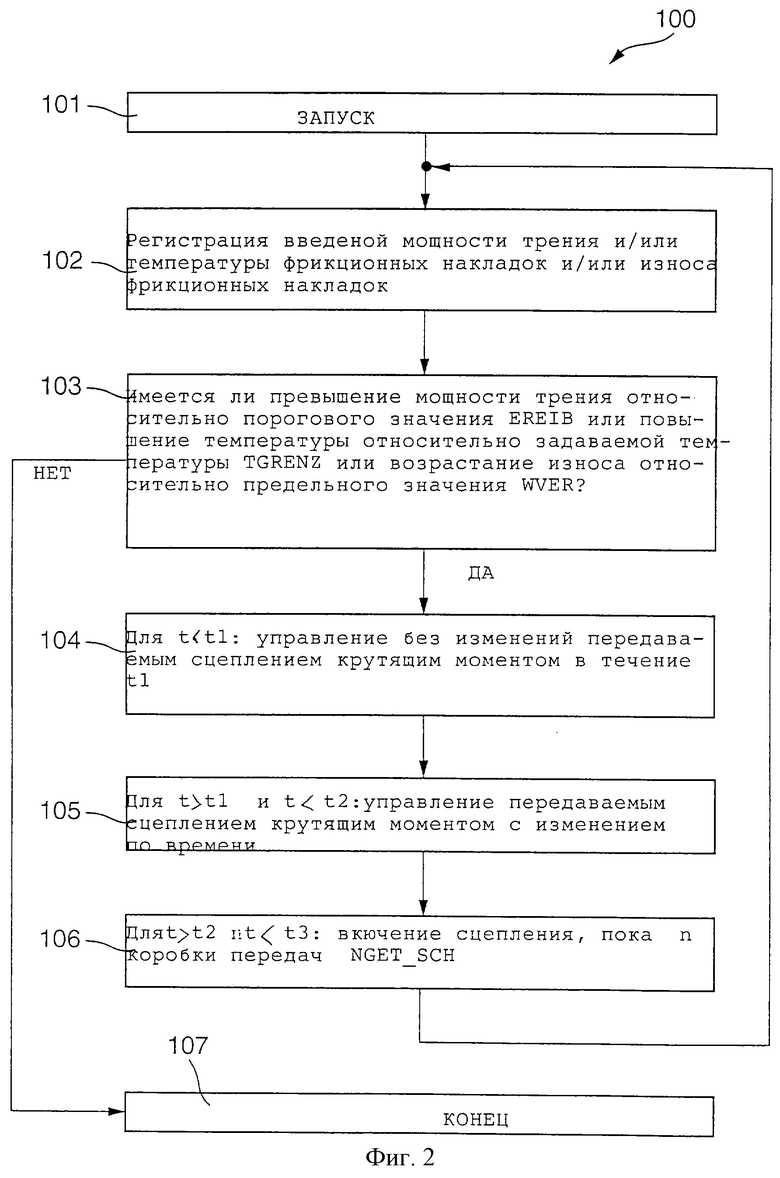
На фиг. 2 показана диаграмма 100, изображающая с помощью блоков процесс управления согласно изобретению. В блоке 101 происходит запуск процесса. В блоке 102 определяют или регистрируют введенную мощность трения. Это может осуществляться, например, за счет того, что определяют пробуксовывание в зоне фрикционных накладок и с помощью передаваемого момента сцепления вычисляют мощность трения EReib=Mk•ns, где ns - пробуксовывание. В этом отношении следует сослаться на DE-OS 19602006. По подводимой мощности трения и данной температурной модели можно вычислить температуру фрикционных накладок сцепления. В этом отношении следует сослаться также на DE-OS 19602006. По температурной модели и заданным функциям или характеристикам можно также рассчитать износ. По мощности трения можно путем интегрирования, как известно, определить энергию и, тем самым, также ввод энергии в зону сцепления. По мощности трения или энергии можно вычислить температуру. Таким образом, можно вместо мощности трения сравнить в качестве критерия также ввод энергии.
В блоке 103 определяют, принимает ли мощность трения, ввод энергии, температура и/или износ более высокое значение по сравнению с предельными значениями соответственно WReib, EReib, TGrenz или WVer. Если это так, то в блоке 104 начинают первую временную фазу с продолжительностью t1, на которой управление передаваемым сцеплением крутящим моментом Mk происходит еще независимо от энергии трения, температуры или износа.
По истечении продолжительности t1 в блоке 105 в течение второй временной фазы с продолжительностью t2 управляют изменяющимся по времени крутящим моментом Mk, который приводит к дерганию автомобиля.
По истечению продолжительности t2 в блоке 106 в течение третьей временной фазы с продолжительностью t3 управляют возрастающим крутящим моментом Mk, который приводит к понижению частоты вращения nMOT двигателя. Им управляют, пока частота вращения двигателя не достигнет порогового значения nMОT_SCH или не будет ниже него, а двигатель почти не заглохнет. Затем передаваемый сцеплением крутящий момент уменьшают, чтобы двигатель не заглох. После уменьшения передаваемого сцеплением крутящего момента по окончании третьей временной фазы можно снова начинать первую или вторую временную фазу.
Далее в течение второй временной фазы можно регистрировать, превышает ли частота вращения на входе коробки передач или иная частота вращения коробки передач задаваемое пороговое значение nGET_SCH. В этом случае вторую временную фазу можно прервать и начать третью временную фазу. За счет этого вторая временная фаза преждевременно прерывается.
Временные фазы имеют, в основном, продолжительность в равном временном диапазоне, т. е. они протекают приблизительно одинаково или в схожем временном масштабе. По меньшей мере, продолжительность t1 первой временной фазы содержит или включает в себя время ожидания, увеличенное по сравнению с обычной продолжительностью вычислений микропроцессоров.
Пороговые значения nMОT_SCH и nGET_SCH могут быть выбраны в зависимости от параметров автомобиля, причем они могут быть выбраны, в частности, в зависимости от передачи.
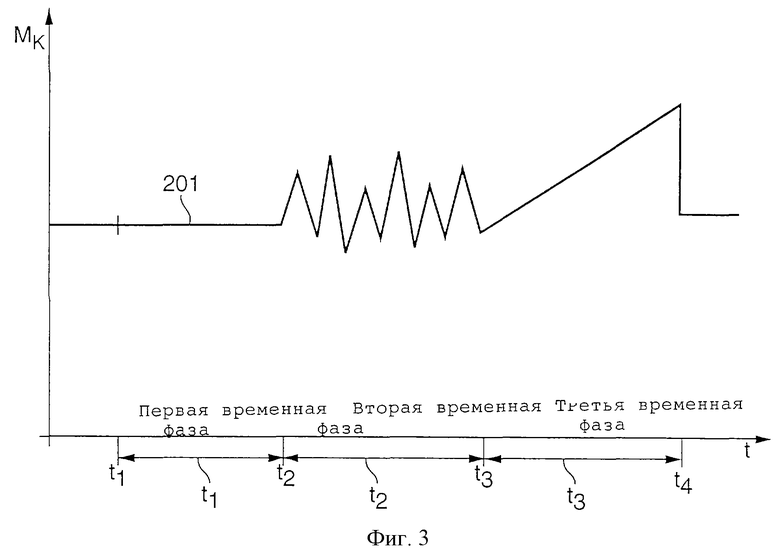
На фиг.3 показана диаграмма, изображающая управляемый блоком управления, передаваемый сцеплением крутящий момент Мk 201 как функцию времени. До момента t1* управление передаваемым крутящим моментом происходит независимо от влияний энергии трения. В момент t1*, в основном, непрерывно вычисляемая или определяемая энергия трения, или определяемая по ней температура, или определяемый по ней износ достигает порогового значения или превышает его. Начиная с момента t1* и до момента t2*, т.е. в течение первой временной фазы с продолжительностью t1, управление передаваемым крутящим моментом остается независимым от влияния энергии трения, или температуры, или износа. В этом временном диапазоне водителю предоставляется возможность закончить актуальный процесс, например процесс трогания с места.
Начиная с момента t2* и до момента t3*, т.е. в течение второй временной фазы с продолжительностью t2, управление передаваемым крутящим моментом происходит таким образом, что он передается с изменением по времени, флуктуацией или пульсацией. При этом может изменяться по времени как амплитуда, так и длительность периода передаваемого крутящего момента. Управление изменяющимся по времени крутящим моментом может осуществляться периодически или апериодически.
Начиная с момента t3* и до момента t4*, т.е. в течение третьей временной фазы с продолжительностью t3, управляемый передаваемый крутящий момент Мk возрастает до тех пор, пока частота вращения двигателя не достигнет порогового значения nMОT_SCH или не будет ниже него и пока двигатель почти не заглохнет. По достижении предельного значения или по истечении продолжительности t3 начинают первую или вторую временную фазу.
Поданная вместе с заявкой формула изобретения представляет предложения по ее формулировке без ограничения для достижения более широкой охраны. Заявитель сохраняет за собой право заявить дополнительные признаки, раскрытые пока только в описании и/или на чертежах.
Приведенные в зависимых пунктах формулы изобретения подчиненности указывают на дальнейшее выполнение объекта основного пункта формулы изобретения за счет признаков соответствующего зависимого пункта; их не следует понимать как отказ от достижения самостоятельной предметной охраны признаков подчиненных пунктов.
Объекты этих зависимых пунктов образуют, однако, также самостоятельные изобретения, имеющие выполнение, независимое от объектов предыдущих зависимых пунктов.
Изобретение не ограничено примерами выполнения согласно описанию. Напротив, в рамках изобретения возможны многочисленные видоизменения и модификации, в частности такие варианты, элементы и комбинации и/или материалы, которые, например, за счет комбинации или видоизменения отдельных признаков, элементов или этапов способа в сочетании с описанными в общем описании и примерах выполнения, а также формуле изобретения и содержащимися на чертежах, являются изобретательскими и за счет комбинируемых признаков приводят к новому объекту или новым этапам способа или последовательностям этапов способа, даже если они касаются способов изготовления, испытания и эксплуатации.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМОБИЛЬ | 1998 |
|
RU2202480C2 |
| СПОСОБ ОСУЩЕСТВЛЕНИЯ КОНТРОЛЯ ЗА РАБОТОЙ КОРОБКИ ПЕРЕДАЧ АВТОМОБИЛЯ И АВТОМОБИЛЬ ДЛЯ ПРИМЕНЕНИЯ СПОСОБА | 1997 |
|
RU2180716C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ | 1996 |
|
RU2219077C2 |
| УСТРОЙСТВО ДЛЯ ПРИВЕДЕНИЯ В ДЕЙСТВИЕ | 1997 |
|
RU2213017C2 |
| СИСТЕМА ЭЛЕКТРОННОЙ СТАБИЛИЗАЦИИ АВТОМОБИЛЯ (ВАРИАНТЫ) И СПОСОБ УПРАВЛЕНИЯ КРУТЯЩИМ МОМЕНТОМ (ВАРИАНТЫ) | 1998 |
|
RU2243429C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ СИЛОВОЙ ПЕРЕДАЧЕЙ | 2011 |
|
RU2537203C2 |
| УСТРОЙСТВО И СПОСОБ ДЛЯ АВТОМАТИЗИРОВАННОГО УПРАВЛЕНИЯ СЦЕПЛЕНИЕМ | 2001 |
|
RU2268830C2 |
| РЕЛЬСОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО С ОДНООСНОЙ ТЕЛЕЖКОЙ | 1997 |
|
RU2143356C1 |
| СПОСОБ КОНТРОЛЯ ПРОЦЕССА ТРОГАНИЯ С МЕСТА ТРАНСПОРТНОГО СРЕДСТВА | 2007 |
|
RU2425766C2 |
| СПОСОБ И УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПЕРЕКЛЮЧЕНИЕМ ПЕРЕДАЧ В АВТОМАТИЗИРОВАННОЙ КОРОБКЕ ПЕРЕДАЧ | 2006 |
|
RU2398693C2 |
Изобретение относится к области транспортного машиностроения и предназначено для автомобилей с устройством управления автоматическим сцеплением. Автомобиль содержит коробку передач, устройство для управления автоматическим сцеплением, исполнительный узел для регулирования передаваемого сцеплением крутящего момента, управляемый блоком управления, который находится в сигнальной связи с датчиками и, при необходимости, другими электронными устройствами, например через сигнальные провода и/или шину данных. Блок управления определяет пробуксовывание сцепления в зоне фрикционных накладок и с помощью передаваемого сцеплением крутящего момента, определяет ввод энергии в зону фрикционных накладок сцепления, и/или определяет повышение температуры фрикционных накладок, и/или определяет повышенный износ фрикционных накладок. Новым является то, что при повышенном вводе энергии, и/или при повышенной температуре, и/или при повышенном износе блок управления на первой временной фазе с продолжительностью t1 управляет передаваемым моментом сцепления независимо от влияния имеющегося ввода энергии, на второй временной фазе с продолжительностью t2 управляет передаваемым сцеплением крутящим моментом с изменением по времени, например в виде импульсов, а на третьей временной фазе с продолжительностью t3 повышает передаваемый сцеплением крутящий момент до тех пор, пока частота вращения двигателя не будет ниже порогового значения или пока не истечет продолжительность t3. Техническим результатом является повышение надежности автомобиля и увеличение безопасности при его эксплуатации. 8 з.п.ф-лы, 3 ил.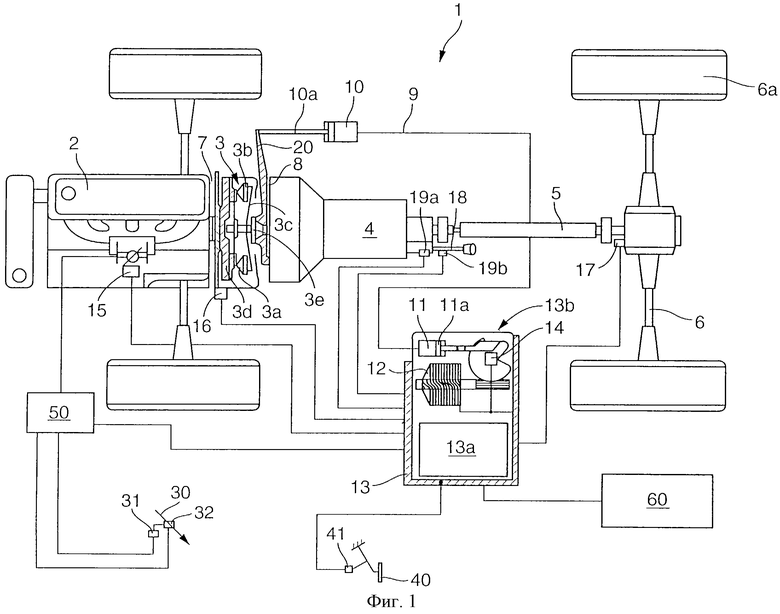
| DE 4134658 A1, 23.04.1992 | |||
| ЛАЗЕР С ВЕРТИКАЛЬНЫМ РЕЗОНАТОРОМ И ПОВЕРХНОСТНЫМ ИЗЛУЧЕНИЕМ | 2015 |
|
RU2645805C1 |
| US 5217412 A, 08.06.1993 | |||
| Устройство автоматического управления сцеплением транспортного средства | 1988 |
|
SU1659251A1 |
| Система автоматического управления фрикционным сцеплением транспортной машины | 1990 |
|
SU1781098A1 |

