Настоящее изобретение относится к способу регулировки насоса системы SCR и к системе, позволяющей применять такой способ.
Согласно стандарту Евро IV на содержание загрязняющих веществ выхлопных газах, в частности автомобилей большой грузоподъемности, действующему с 2005 года, необходимо установить устройства, снижающие выбросы NOx (оксиды азота).
Система, используемая большинством производителей автомобилей большой грузоподъемности для снижения выбросов NOx до предписанного уровня, по существу состоит в проведении селективной каталитической реакции с восстанавливающим агентом, таким как мочевина ("SCR с мочевиной" или селективное каталитическое восстановление с использованием аммиака, генерируемого на месте в выхлопных газах, за счет разложения мочевины).
Для этого необходимо оборудовать транспортные средства баком, содержащим раствор мочевины, устройством для дозирования мочевины, впрыскиваемой в выхлопной тракт, и устройством для подачи раствора мочевины на дозирующее устройство для впрыска мочевины. По существу подающее устройство является насосом, приводимым в действие электродвигателем.
Ранее предлагалось несколько систем для управления работой такого насоса.
В заявке WO 2008/087153 на имя настоящего заявителя описан способ управления работой насоса системы SCR, при этом насос приводится в действие электродвигателем и управляется контроллером и согласно этому способу электронный модуль управления (ЭМУ) посылает на контроллер управляющий ШИМ-сигнал (широтно-модулирующий сигнал), коэффициент заполнения которого меняется как функция требуемых рабочих условий насоса и в соответствии с которым контроллер воздействует на электродвигатель, для создания этих рабочих условий на насосе.
В этом способе, чтобы обеспечить подачу насосом под рабочим давлением и как можно точнее (или, другими словами, чтобы давление на выходе насоса быстро и правильно достигало заданного давления, информацию о котором посылает электронный модуль управления), контроллер соединен с датчиком давления и система содержит регулятор давления (обычно относящийся к типу ПИД (пропорционально-интегрально-дифференциальное регулирование)) и контроллер, управляющий частотой вращения электродвигателя. Это позволяет в контуре регулирования сравнивать величину уставки давления, когда это уместно (т.е., когда насос работает), с величиной, измеренной датчиком и, затем, воздействовать на частоту вращения двигателя посредством контроллера частоты вращения.
По существу регулятор проводит сравнение требуемого давления и давления измеренного, и генерирует сигнал ошибки для контроллера частоты вращения двигателя.
Хотя на практике этот способ дает хорошие результаты, он требует использования датчика давления, который является дорогим устройством, который может составлять существенную часть общей стоимости системы.
Кроме того, датчик давления часто не выдерживает низких температур и из-за этого может выйти из строя или работать с отклонениями. Эту проблему могла бы устранить система управления, в которой не используется датчик давления.
Однако, в некоторых вариантах систем SCR, особенно в тех, где используется щеточный или бесщеточный электродвигатель постоянного тока, где насос приводится в действие за счет магнитного взаимодействия между статором и ротором насоса, а сама муфта прикреплена к механическому приводному валу двигателя, информация о частоте вращения электродвигателя насоса и о токе в обмотках электродвигателя имеется автоматически (особенно при проведении диагностики системы) поэтому, нет необходимости устанавливать отдельные датчики для их измерения.
Заявитель изучил эту информацию и обнаружил, что из данных об измеренном токе можно создать образ давления с допуском в ±0,5 бар относительно запрошенной величины давления.
Действительно, имеется возможность смоделировать двунаправленный радиальный трехфазный двигатель постоянного тока с использованием следующих формул:
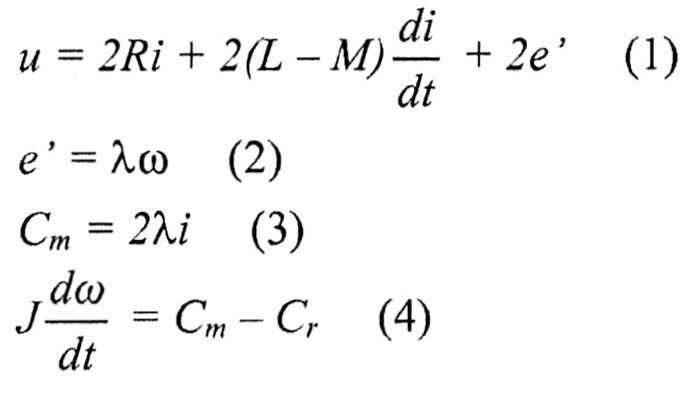
где:
R - сопротивление обмотки,
L - собственная индуктивность обмотки,
М - коэффициент взаимоиндукции одной обмотки с другими,
i - постоянный коммутируемый ток в обмотках,
е' - противоэлектродвижущая сила,
щ - частота вращения,
Cm - крутящий момент электродвигателя,
Cr - момент сопротивления,
л - постоянная момента для одной фазы.
Для других типов электродвигателей (с однонаправленным питанием, радиальные, трехфазные; соединенные треугольником, трехфазные; с двунаправленным питанием радиальные, четырехфазные; и т.п.) можно вывести эквивалентные уравнения.
Если принять, в первом приближении, что мы работаем в постоянных (не переходных) условиях, уравнения (1), (2), (3) и (4) принимают форму:

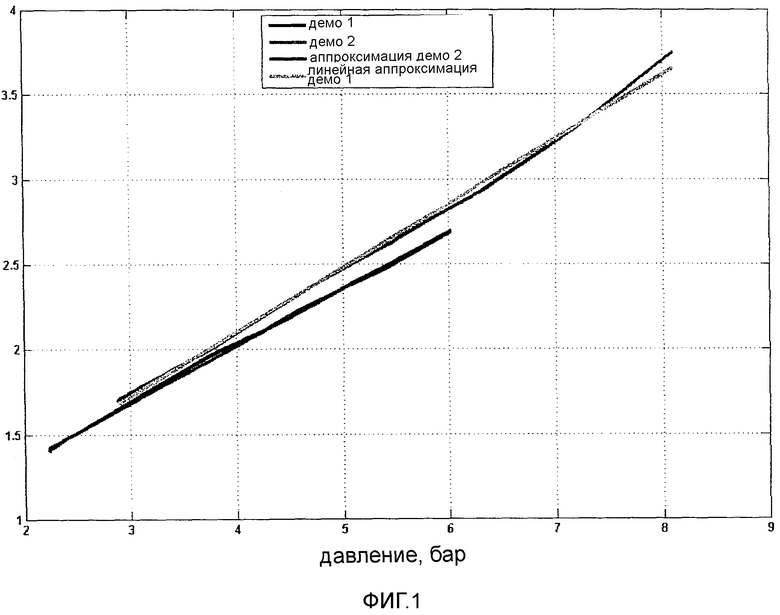
Для того чтобы подтвердить эти формулы заявитель провел испытания на нескольких системах, имеющих электродвигатели, насосы, линии и прочее, с одинаковыми характеристиками. На фиг.1 показаны результаты испытаний, проведенных на двух "разных" системах (имеющих идентичные характеристики, но компоненты которых были отобраны из разных производственных партий). На примере этих двух систем видно, что с помощью регулирования по токовой петле 2,5 А (demo 1) для первой системы и 2,4 А (demo 2) для второй системы было получено давление 5 бар, т.е., величина обычно используемая на практике. Если для двух систем нужно использовать контур регулирования по току 2,4 А для второй системы, естественно, будет получено давление 5 бар, а для первой - 4,75 бар. Это последнее давление является приемлемым, так как находится в допуске, равном 0,5 бар, применяемом во многих проектах SCR. То же относится и к случаю использования тока в 2,5 А. Таким образом, используя одну из этих двух величин, по меньшей мере для двух применяемых систем, давление будет меняться от 4,5 бар до 5,55 бар и, следовательно, будет соответствовать допуску в ±0,5 бар.
Разницу между опорными величинами тока в этих двух системах для данного давления можно объяснить механическим сопротивлением (например, сухое трение в подшипниках) и вязким трением (зависящим от частоты вращения, например, сопротивлением, вызванным вентиляцией), которые могут быть разными. Производственные допуски систем также могут привести к разнице во внутренних моментах сопротивления и в ферромагнитных потерях.
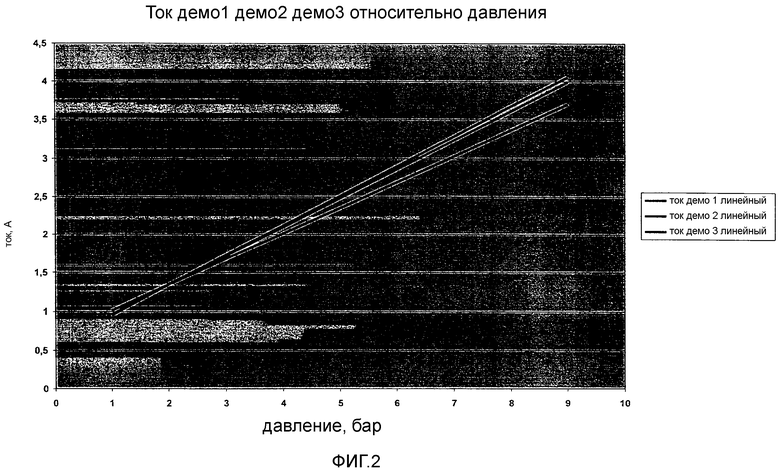
Испытания на третьей системе, но на этот раз в реальных условиях с ПИД-контроллером, использующем информацию о токе (без открывания инжектора) позволили показать, что колебания давления составили порядка 0,22 бар при использовании среднего тока 2,5 А, что на этот раз дает среднее давление 5,077 бар. На приложенной фиг.2 приведены результаты этого теста, линеаризованные и наложенные на результаты (также линеаризованные) двух других тестов.
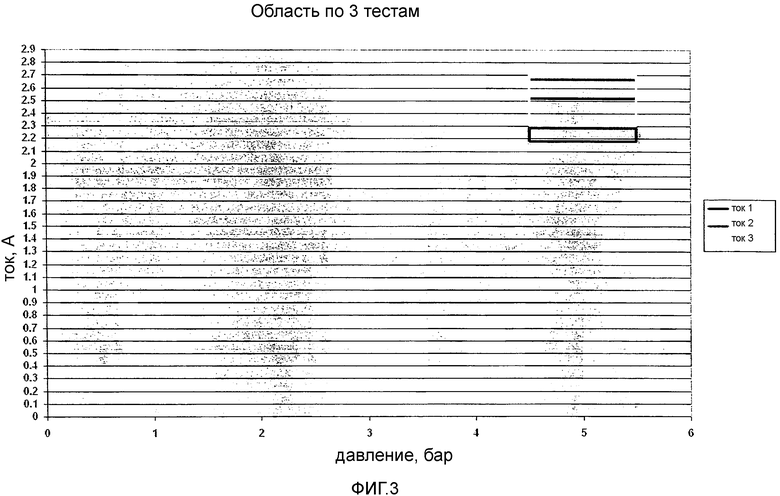
На фиг.3 сгруппированы области 3 серий тестов проведенных для опорного давления в 5 бар (которое часто требуют производители автомобилей). Для каждой серии тестов определялось минимальная величина тока, которая соответствовала давлению 4,5 бар и максимальная величина тока, которая соответствовала давлению 5,5 бар, чтобы выполнить требование о допуске ±0,5 бар, и были построены прямоугольники, ограничивающие эти величины, тем самым включающие все рабочие точки насоса между этими величинами. Пересечение этих трех регионов дает допустимый диапазон тока для трех систем (т.е., рабочие точки, которые укладываются в допуск на уставку давления). На фиг.3 показано, что приняв для контура регулирования опорный ток в 2,4 А, для трех систем с уставкой 5 бар выполняется требование о допуске в ±0,5 бар.
Фактически идея, лежащая в основе настоящего изобретения, может применяться к любому насосу, приводимому в действие электродвигателем.
Действительно, в насосе такого типа Cm=Ch+Cr, где Cm - крутящий момент двигателя (или входной момент, генерируемый двигателем для привода насоса и преодоления механических и ферромагнитных потерь), который пропорционален току, т.е., Cm=K1×1 (при К1 = константа); Ch - гидравлический момент, пропорциональный давлению, т.е., Ch=K2×p (при К2 = другая константа); а Cr - момент сопротивления, возникающий в основном в результате сухого и вязкого трения в насосе и, следовательно, является постоянным для данного насоса с данной текучей средой (хотя он немного меняется с частотой вращения электродвигателя). Наконец, в качестве первого приближения, мы имеем: K1×I=K2×p+Cr, т.е., линейное соотношение между током и давлением, которое делает настоящее изобретение применимым к насосу такого типа.
Как поясняется выше, это, однако, является приближением и, в случае системы SCR, которая должна работать с допуском ±0,5 бар относительно требуемой величины давления, такое приближение может быть недостаточно точным.
Однако такое приближение можно сделать существенно более точным, по меньшей мере, если можно будет точно определить Cr (чтобы вычесть его из Cm и получить гидравлический момент, пропорциональный давлению). Фактически Cr соотносится с током и может меняться от одной системы к другой как функция механических допусков, сборки, частоты вращения двигателя и пр., и он является суммой сухого трения и вязкого трения в насосе. На практике долю сухого трения можно определить, измеряя ток без нагрузки в самом начале нарастания давления в системе.
Такой способ для системы SCR можно очень легко реализовать. Действительно, системы SCR необходимо продувать после каждого выключения электродвигателя так, что при каждом пуске насос пуст и система не нагружена. Для продувки системы достаточно вращать насос в обратном направлении. Когда после этого двигатель начинает вращаться в направлении нагнетания давления, дополнительный ток возникнет в результате только гидравлической части и будет коррелировать (с почти линейны соотношением) с давлением.
Вязкостная составляющая Cr определяется тестами на долговечность насоса, путем учета вариаций в этом сопротивлении как функции старения насоса. Эта составляющая не включена в оценку Cr, используемую в способе по настоящему изобретению, но неявным образом содержится в вышеприведенном уравнении (K1×I=K2×p+Cr) путем изменения констант К1 и К2 так, что фактически это линейное уравнения/отношение становится более сложным отношением которое будет создано на основе множества экспериментальных точек, полученных на нескольких разных насосах во множестве разных рабочих условий, для которых измеряют ток, давление, возраст насоса, частоту вращения, температуру. Для нахождения такого отношения/модели к таким данным можно применить такие методы как алгоритм минимальной среднеквадратичной ошибки, алгоритм взвешенной среднеквадратичной ошибки, нечеткую нейронную сеть (neuro fuzzy) и т.д., предпочтительно, после того, как будет построена модель. Модель может относиться к следующим типам: КИХ (конечная импульсная характеристика), БИХ (бесконечная импульсная характеристика), Бокса-Дженкинса, ARMAX и т.д.
Таким образом, настоящее изобретение относится к способу регулирования моторизованного насоса системы SCR при этом насос создает давление, подвергается гидравлическому моменту, связанному с этим давлением, а также моменту сопротивления и приводится в действие электродвигателем, содержащим обмотки, на которые подается ток, и развивающим крутящий момент, связанным с этим током, в соответствии с которым для регулирования насоса используется средство для измерения тока в обмотках электродвигателя, регулятор, общего тока, потребляемого электродвигателем и модель отношения между током и давлением с применением оценки части момента сопротивления (а именно, сухого трения) полученной путем вращения насоса без нагрузки с разными частотами и путем измерения соответствующего тока.
Предпочтительно, оценка части момента сопротивления (или "Cr") проводится во время или сразу после продувки системы SCR, проводимой путем реверсирования потока в насосе, или при пуске этой системы. Такой способ продувки описан в заявке WO 2006/064028 того же заявителя, содержание которой для этой цели включено в настоящее описание путем ссылки. На практике для реверсирования потока, создаваемого насосом, предпочтительно применяют либо переключатель, который позволяет реверсировать поток непосредственно (реверсируя направление вращения насоса), либо 4/2-ходовой клапан который с помощью соответствующих муфта/линий дает тот же эффект. В контексте настоящего изобретения предпочтительным является продувка путем реверсирования направления вращения электродвигателя.
В контексте настоящего изобретения для использования подходят щеточные или бесщеточные двигатели постоянного тока и двигатели переменного тока, предпочтительно индукционного типа. В частности, хорошо подходят электродвигатели постоянного тока. Изобретение дает хорошие результаты с электродвигателями с магнитным взаимодействием.
Что касается средств измерения тока, они обычно содержат по меньшей мере один датчик тока (или два в случае вышеупомянутых радиальных трехфазных двигателей).
Следовательно, настоящее изобретение относится в частности к способу регулирования насоса, как описано выше, где двигателем является электродвигатель постоянного тока, содержащий магнитные обмотки, и согласно настоящему изобретению для регулирования давления насоса используют датчики тока, текущего в обмотках электродвигателя и общий регулятор тока.
Согласно первому аспекту настоящее изобретение относится к способу, описанному выше, в котором используют компьютер, датчики тока, текущего через обмотки, регулятор общего тока, потребляемого двигателем и контроллер частоты вращения двигателя, и согласно которому:
- компьютер рассчитывает уставку тока на основе уставки давления;
- регулятор тока циклически сравнивает фактическую величину тока, измеренную датчиком тока, с уставкой тока и генерирует сигнал ошибки для контроллера частоты вращения электродвигателя в зависимости от результата такого сравнения так, что этот контроллер изменяет частоту вращения электродвигателя для минимизации ошибки между уставкой тока и измеренной величиной тока.
Этот принцип описан и показан без ограничения с помощью приложенной фиг.4, на которой видно, что по существу, сигнал ошибки содержит новую уставку частоты вращения двигателя и контроллер частоты вращения содержит регулятор частоты вращения, который сравнивает эту уставку с фактической частотой вращения, измеренной датчиком частоты вращения, или рассчитанной по противоэлектродвижущей силе (для электродвигателя постоянного тока, определенного вышеприведенной формулой), и на этом начинается цикл. Этот расчет предпочтительно осуществляется FCU.
Предпочтительно, и регулятор тока, и регулятор частоты вращения относятся к типу ПИД-регуляторов. Точно также можно использовать регуляторы других типов, например, построенные на принципах нечеткой логики, жесткого управления, оптимального управления и т.п.
Согласно второму аспекту настоящее изобретение относится к способу управления работой насоса, приводимого в действие электродвигателем постоянного тока, содержащим магнитные обмотки ив котором используют компьютер и регулятор тока, текущего в обмотках, и содержащему этапы, на которых:
- компьютер рассчитывает уставку тока на основе уставки давления;
- регулятор тока циклически сравнивает фактическую величину тока, измеренного датчиком, с уставкой и генерирует управляющий сигнал для напряжения, подаваемого на обмотки бесщеточного электродвигателя постоянного тока так, что этот контроллер изменяет напряжение в обмотках электродвигателя для минимизации ошибки между уставкой тока и измеренным током.
Этот вариант основан на идее, заключающейся в том, что контроллер частоты вращения не обязателен, поскольку напряжение на обмотках (фазах) бесщеточного электродвигателя постоянного тока может рассчитывать непосредственно регулятор тока, а частота вращения двигателя является отображением приложенного напряжения.
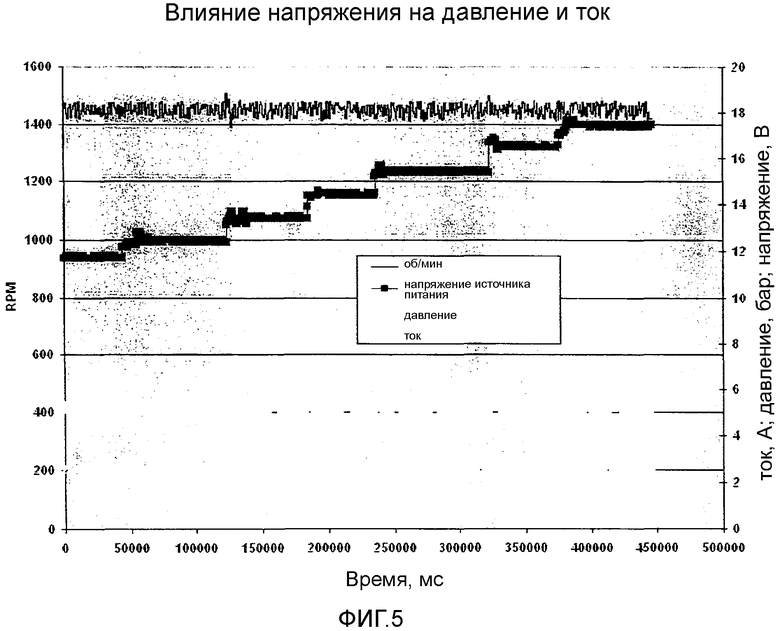
В уравнениях (5), (6), (7), (8) показаны различные переменные, которые следует учитывать для подтверждения этой концепции. Уравнение (5) показывает, что ток является функцией приложенного к электродвигателю напряжения. В автомобиле это напряжение может изменяться от 9 до 17 вольт, что следует учитывать. Заявитель провел испытания различных напряжений питания, как показано на фиг.5. Эти изменения не влияют на ток благодаря управлению частотой вращения. Действительно, когда напряжение растет, ток и частота вращения имеют тенденцию к увеличению, но поскольку регулировка в первую очередь осуществляется по токовой петле (которая уменьшает уставку частоты вращения (ШИМ)), а затем, по петле частоты вращения, то ток не изменяется.
То же относится и к температуре (второй параметр, который следует учитывать), поскольку, когда температура растет, растет сопротивление и, следовательно, ток (и, следовательно, также и давление) имеет тенденцию к уменьшению и токовая петля работает на поддержание опорного тока, увеличивая частоту вращения.
Насос, к которому применяется этот способ по настоящему изобретению, может быть, например, шестеренчатым насосом или диафрагменным насосом. Настоящее изобретение дает хорошие результаты с шестеренчатым насосом. Действительно, насос такого типа может работать с хорошим КПД в двух противоположных направлениях вращения, одно из которых по существу соответствует нагнетанию жидкости в питающую линию, а другое соответствует продувке питающей линии. Выбор шестеренчатого насоса с магнитным взаимодействием дает особые преимущества, поскольку позволяет обойтись без динамического уплотнения.
Согласно предпочтительному варианту, описанному выше, насосом управляют, используя регулятор тока и контроллер частоты вращения, который по существу содержит регулятор частоты вращения.
По существу, уставка давления передается на компьютер электронным модулем управления, который посылает управляющий сигнал, предпочтительно ШИМ-сигнал (широтно-импульсная модуляция), который содержит информацию, относящуюся к рабочим условиям насоса, как показано в вышеупомянутой международной заявке на патент того же заявителя и которая включена в настоящее описание путем ссылки. Как понимается, эти условия содержат уставку давления и по меньшей мере один другой пакет информации, например, информацию об остановке/блокировке, о направлении вращения и т.п. Информация предпочтительно относится ко всем рабочим условиям насоса, а именно: остановке, вращение вперед, вращение назад, рабочее давление (на выходе насоса) и т.д., так, что работа насоса полностью представлена одним сигналом. Другими словами, контроллер получает закодированные команды (в форме ШИМ-сигнала с переменным коэффициентом заполнения), на остановку насоса, или на вращение его вперед, назад и с каким давлением, и контроллер выполняет эти команды, воздействуя на электродвигатель, т.е., по существу, в свою очередь, посылая сигнал напряжения, который также может быть ШИМ-сигналом.
Электронный модуль управления в контексте настоящего изобретения является либо модулем, специально предназначенным для выполнения функции SCR либо модулем, интегрированным в электронный модуль управления (или электронный блок управления) двигателем внутреннего сгорания.
То же относится и к компьютеру, который получает уставку давления и рассчитывает соответствующую уставку тока: он может быть либо интегрирован в электронный блок управления (ECU), либо интегрирован в электронный модуль управления системы SCR, который также иногда называют фланцевым блоком управления, (Flange Control Unit, FCU), при этом различные активные компоненты системы SCR иногда интегрируют на общей плате, расположенной в баке или на баке, содержащем жидкость. В этом варианте в FCU предпочтительно интегрирован по меньшей мере контроллер частоты вращения насоса.
Аналогично, регулятор тока, используемый в способе по настоящему изобретению, также интегрирован в ECU или FCU. Вторая альтернатива (где регулятор тока интегрирован в FCU) является предпочтительной. Особо предпочтительно, все компоненты и регуляторы интегрированы в FCU, который получает только уставку давления от отдельного электронного модуля управления.
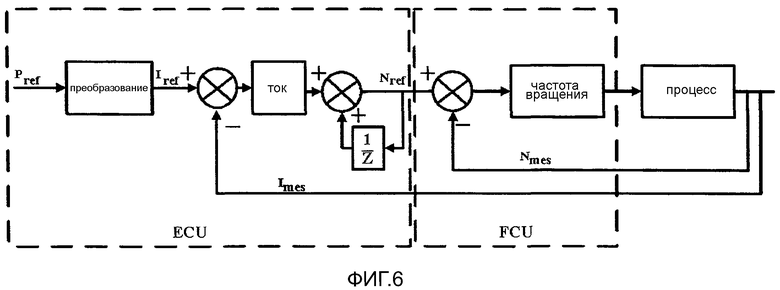
В первом варианте настоящего изобретения регулятор тока непосредственно рассчитывает уставку частоты вращения, которую следует послать (по существу через шину CAN) на регулятор частоты вращения - этот вариант показан на фиг.4. Во втором суб-варианте регулятор тока вычисляет модификацию частоты вращения (сигнал ошибки) и суммирует ее с предыдущей величиной частоты вращения, хранящейся в запоминающем устройстве, и посылает результат на контроллер частоты вращения (этот способ является более эффективным, поскольку при прохождении через CAN-шину контур управления имеет длительное время отклика). Это - второй вариант изобретения, показанный на фиг.6.
Настоящее изобретение также относится к системе подачи жидкой присадки для выхлопных газов двигателя сгорания, при этом система пригодна для выполнения описанного выше способа и для этой цели содержит:
- насос, выполненный с возможностью подавать присадку из бака в выхлопные газы,
- щеточный или бесщеточный электродвигатель постоянного тока, выполненный с возможностью приводить в действие насос,
- средство для измерения общего тока, подаваемого на обмотки электродвигателя,
- регулятор этого тока,
- контроллер частоты вращения электродвигателя, и
- компьютер для вычисления уставки тока на основе уставки давления.
Для этой цели компьютер предпочтительно использует алгоритм, который учитывает изменчивость момента сопротивления с частотой вращения. Согласно одному особо предпочтительному варианту, этот алгоритм также учитывает температуру (которая сильно влияет на вязкость) и/или влияние старения насоса (возникающее со временем дрейф вышеописанных параметров К1 и К2).
Присадка, о которой идет речь, в объеме этого варианта настоящего изобретения предпочтительно является восстанавливающим агентом, способным восстанавливать NOx, присутствующие в выхлопных газах двигателя внутреннего сгорания. Таким агентом преимущественно является водный раствор предшественника аммиака. Настоящее изобретение дает хорошие результаты с эвтектическими растворами мочевины в воде, для которых имеется стандарт качества, например, согласно стандарту DIN 700070, в случае раствора AdBlue® (коммерческий водный раствор мочевины), содержание мочевины составляет 31,8%-33,2% (по весу) (т.е., 32,5±0,7% по весу), отсюда доступное количество аммиака составляет от 18,0% до 18,8%.
Настоящее изобретение также может использоваться для смеси мочевины и муравьинокислого аммония, продаваемой под торговым наименованием DenoxiumTM и один из составов которого (Denoxium-30) содержит количество аммиака, эквивалентное раствору AdBlue®. Этот раствор имеет преимущество только по точке замерзания от -30°С и выше (в отличие от -11°С), но его недостатком являются проблемы с коррозией, связанные с возможным высвобождением муравьиной кислоты.
Этот вариант настоящего изобретения может применяться к любому двигателю внутреннего сгорания. Он преимущественно применяется к дизельным двигателям и, в частности, к дизельным двигателям автомобилей большой грузоподъемности.
Предпочтительно, система по этому варианту изобретения по существу также оснащается форсункой, позволяющей впрыскивать присадку в выхлопные газы. Эта форсунка может быть известной форсункой. Она может быть, например, "активной" форсункой, т.е., форсункой, выполняющей функцию дозирования.
Обычно система по настоящему изобретению содержит компьютер, соединенный с форсункой и позволяющий впрыскивать нужное количество присадки в выхлопные газы, (в частности, как функцию следующих параметров: уровень выбросов и степень преобразования NOx; температура и давление; частота вращения двигателя и нагрузка; и т.д., и, необязательно, качество (степень старения) раствора).
В определенных случаях весь поток присадки, создаваемый насосом, не впрыскивается в выхлопные газы, и та часть присадки, которая не была впрыснута, должна быть возвращена в бак. Преимущественно это делается с помощью возвратного контура (линии), содержащей калиброванное отверстие или калиброванный клапан и обратный клапан. Действительно, в одном предпочтительном варианте изобретения насос намеренно отмеряет избыточное количество жидкости (или создает избыточное давление), избыток которой возвращается в бак по вышеупомянутой возвратной линии. Когда мочевина впрыскивается в выхлопные газы двигателя, этот вариант позволяет охлаждать форсунку. В этом варианте обратный клапан используется для предотвращения движения жидкости по кругу (в контуре, образованном подающей линией и линией возврата в бак) во время продувки (которая, например, может осуществляться вращением насоса в обратном направлении), а калиброванное отверстие (ограничитель) используется для задания расхода и добавления сопротивления для повышения давления (путем увеличения перепад давления в возвратной линии).
Такие элементы подробно описаны в заявке WO 2008/155303 того же заявителя (и включенной в настоящее описание путем ссылки), принципы которой можно применить в контексте настоящего изобретения, но заменив измерение давления измерением тока. Следовательно, согласно другому аспекту, настоящее изобретение также относится к процессу запуска насоса системы, описанной выше, согласно которому:
1. определяют температуру (Т1) жидкости в баке и сравнивают с уставкой (Т0) температуры;
2. если температура (Т1) больше уставки (Т0) температуры, насос включают;
3. если температура (Т1) меньше или равна уставке (Т0) температуры, бак и насос нагревают в течение времени t1; затем
4. насос включают на время t2, в течение которого выходное давление насоса оценивают, измеряя ток. Этой фазе может предшествовать операция эвакуация воздуха, захваченного во время продувки системы и операция заполнения линий;
5. если это оценочное давление постоянно и находится в допустимом диапазоне, насос продолжает работать;
6. если давление не постоянно и/или находится не в допустимом диапазоне уставки давления, насос останавливают, и бак подогревают в течение времени t3, по истечении которого этапы 4-6 повторяют.
Другими словами, в этом варианте изобретения перед регулированием насоса с помощью тока, как описано выше, его пускают, как описано выше, при этом философия изобретения заключается и в процедуре пуска и в процедуре управления, а также в том, что работу насоса регулируют, используя измерения тока, а не давления.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАСОСЫ ДЛЯ РАСТВОРА МОЧЕВИНЫ, СОДЕРЖАЩИЕ ОБВОДНОЙ КАНАЛ УТЕЧКИ | 2012 |
|
RU2573070C2 |
| ЦИКЛЫ ПРОМЫВКИ ДЛЯ СИСТЕМЫ ВПРЫСКА МОЧЕВИНЫ | 2012 |
|
RU2572729C2 |
| СИСТЕМА И СПОСОБЫ УПРАВЛЕНИЯ ДОЗИРОВАНИЕМ ВОССТАНОВИТЕЛЯ | 2014 |
|
RU2653265C2 |
| СИСТЕМА И СПОСОБ НАГРЕВА СИСТЕМ ВПРЫСКА МОЧЕВИНЫ (ВАРИАНТЫ). | 2014 |
|
RU2640137C2 |
| СПОСОБ РАБОТЫ ВЫХЛОПНОЙ СИСТЕМЫ (ВАРИАНТЫ) И ВЫХЛОПНАЯ СИСТЕМА ТРАНСПОРТНОГО СРЕДСТВА | 2015 |
|
RU2708567C2 |
| КЛАПАНЫ ДЛЯ СИСТЕМ ВПРЫСКА МОЧЕВИНЫ | 2012 |
|
RU2573436C2 |
| СПОСОБЫ РАБОТЫ ДВИГАТЕЛЯ | 2013 |
|
RU2625605C2 |
| СИСТЕМА НАГРЕВА СИСТЕМ ВПРЫСКА МОЧЕВИНЫ (ВАРИАНТЫ) | 2014 |
|
RU2634980C2 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ВЫХЛОПНЫМИ ГАЗАМИ ДЛЯ ДВИГАТЕЛЯ ВНУТРЕННЕГО СГОРАНИЯ | 2020 |
|
RU2735703C1 |
| СПОСОБ И СИСТЕМА ДЛЯ ДЕТЕКТИРОВАНИЯ КРИСТАЛЛОВ ВОССТАНАВЛИВАЮЩЕГО АГЕНТА В СИСТЕМЕ SCR ПОСЛЕДУЮЩЕЙ ОБРАБОТКИ ВЫХЛОПНЫХ ГАЗОВ | 2012 |
|
RU2563595C1 |
Группа изобретений относится к способу регулировки насоса системы селективной каталитической реакции (SCR) и к системе, позволяющей применять такой способ. В способе регулирования приводимого в действие электродвигателем насоса системы SCR на насос, создающий давление, действует гидравлический момент, связанный с этим давлением, и момент сопротивления. Насос приводится в действие электродвигателем, содержащим обмотки, на которые подают ток, и развивающим момент, связанный с этим током. В соответствии с чем для регулирования насоса используют средство измерения тока в обмотках электродвигателя, регулятор общего тока, потребляемого электродвигателем, и модель отношения между током и давлением, используя оценку части момента сопротивления, возникающего в результате сухого трения, полученную путем вращения насоса без нагрузки с разными частотами, и измерения соответствующего тока. Группа изобретений направлена на обеспечение точной регулировки насоса системы SCR. 3 н. и 11 з.п. ф-лы, 6 ил.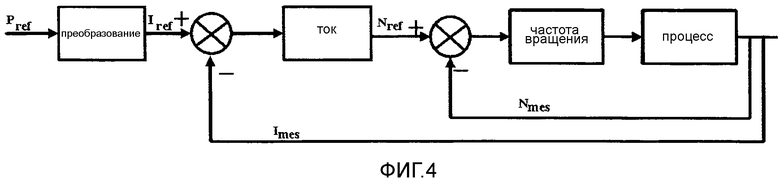
1. Способ регулирования приводимого в действие электродвигателем насоса системы селективного каталитического восстановления (SCR), при этом на насос, создающий давление, действует гидравлический момент, связанный с этим давлением, и момент сопротивления, при этом насос приводится в действие электродвигателем, содержащим обмотки, на которые подают ток, и развивающим момент, связанный с этим током, в соответствии с чем для регулирования насоса используют средство измерения тока в обмотках электродвигателя, регулятор общего тока, потребляемого электродвигателем, и модель отношения между током и давлением, используя оценку части момента сопротивления, возникающего в результате сухого трения, полученную путем вращения насоса без нагрузки с разными частотами, и измерения соответствующего тока.
2. Способ по предшествующему пункту, согласно которому оценку части момента сопротивления осуществляют во время или сразу после продувки системы SCR, выполняемой путем реверсирования потока насоса или при пуске системы.
3. Способ по предшествующему пункту, согласно которому продувку осуществляют путем реверсирования направления вращения насоса.
4. Способ по любому из предшествующих пунктов, согласно которому электродвигатель является электродвигателем постоянного тока и согласно которому используют датчики тока, текущего в обмотках электродвигателя, и регулятор общего тока для регулирования давления насоса.
5. Способ по предшествующему пункту, отличающийся тем, что в нем также используют компьютер и контроллер частоты вращения двигателя, и тем, что он содержит следующие этапы, на которых
- компьютер рассчитывает уставку тока на основе уставки давления;
- регулятор тока циклически сравнивает фактическую величину тока, измеренную датчиком тока, с величиной уставки тока и генерирует сигнал ошибки для контроллера частоты вращения электродвигателя в зависимости от результата такого сравнения так, что этот контроллер изменяет частоту вращения электродвигателя для минимизации ошибки между уставкой тока и измеренной величиной тока.
6. Способ по предшествующему пункту, при котором сигнал ошибки состоит из новой уставки частоты вращения электродвигателя, и причем контроллер частоты вращения содержит регулятор частоты вращения, который сравнивает величину этой уставки с фактической величиной частоты вращения, измеренной датчиком частоты вращения или рассчитанной по противоэлектродвижущей силе электродвигателя.
7. Способ по предшествующему пункту, согласно которому регулятор тока и регулятор частоты вращения являются регуляторами ПИД-типа.
8. Способ по п. 4, использующий компьютер и регулятор тока, текущего по обмоткам, содержит этапы, при которых
- компьютер рассчитывает уставку тока на основе уставки давления;
- регулятор тока циклически сравнивает фактическую величину тока, измеренного датчиком тока, с величиной уставки тока и генерирует управляющий сигнал для напряжения, подаваемого на обмотки электродвигателя постоянного тока так, что этот контроллер изменяет напряжение в обмотках электродвигателя для минимизации ошибки между уставкой тока и измеренным током.
9. Способ по любому из пп. 1-3, отличающийся тем, что насос является шестеренчатым насосом.
10. Способ по п. 3, отличающийся тем, что уставку давления передает на компьютер электронный модуль управления (ЕМС), который посылает управляющий ШИМ-сигнал, который содержит информацию о рабочих условиях насоса.
11. Способ по п. 3, отличающийся тем, что регулятор тока непосредственно рассчитывает уставку частоты вращения, которая должна быть послана на регулятор частоты вращения.
12. Способ по п. 3, отличающийся тем, что регулятор тока вычисляет изменение уставки частоты вращения и затем суммирует его с величиной предыдущей частоты вращения и посылает результат на контроллер частоты вращения.
13. Система для подачи жидкой присадки для выхлопных газов двигателя внутреннего сгорания, содержащая:
- насос, выполненный с возможностью подавать присадку из бака в выхлопные газы и выполненный с возможностью регулирования способом по любому из предшествующих пунктов,
- щеточный электродвигатель постоянного тока или бесщеточный электродвигатель постоянного тока, выполненный с возможностью приводить в действие насос и содержащий обмотки;
- датчики для измерения общего тока, протекаемого в обмотках электродвигателя,
- регулятор этого тока,
- контроллер частоты вращения электродвигателя и
- компьютер для вычисления уставки тока на основе уставки давления.
14. Способ управления системой по предшествующему пункту, используя способ регулирования по любому из пп. 1-12, включая управление пуском насоса в соответствии со следующими этапами:
1. определяют температуру (Т1) жидкости, поддерживаемую в баке, и сравнивают с уставкой (Т0) температуры;
2. если температура (Т1) больше уставки (Т0) температуры, насос включают;
3. если температура (Т1) меньше или равна уставке (Т0) температуры, бак и насос нагревают в течение времени t1; затем
4. насос включают на время t2, в течение которого выходное давление насоса оценивают, измеряя ток;
5. если это оценочное давление постоянно и находится в допустимом диапазоне, насос продолжает работать;
6. если давление не постоянно и/или находится не в допустимом диапазоне уставки давления, насос останавливают и бак подогревают в течение времени t3, по истечении которого этапы 4-6 повторяют.
| US 6577089 B1, 10.06.2003 | |||
| Способ и приспособление для нагревания хлебопекарных камер | 1923 |
|
SU2003A1 |
| Способ приготовления мыла | 1923 |
|
SU2004A1 |
| Устройство для сдавливания деталей при диффузионной сварке | 1983 |
|
SU1184631A1 |
| Станок для изготовления деревянных ниточных катушек из цилиндрических, снабженных осевым отверстием, заготовок | 1923 |
|
SU2008A1 |
| ВОЗВРАТНО-ПОСТУПАТЕЛЬНЫЙ ГИДРАВЛИЧЕСКИЙ НАСОС | 2001 |
|
RU2285150C2 |

