Данное изобретение относится к усовершенствованным гастростомическим трубкам ли катетерам для энтерального питания.
Существует ряд ситуаций, при которых есть необходимость катетеризации полости для достижения желаемой медицинской цели. Одной из относительно обычных ситуаций является необходимость введения питательных растворов или лекарств непосредственно в желудок или кишечник. Стома формируется в желудке или стенке кишечника, и катетер вводится через стому. Это хирургическое отверстие и/или процедура создания отверстия обычно именуется «гастростомия». Питательные растворы могут быть введены через катетер для подачи питательных веществ непосредственно в желудок или кишечник (данный процесс известен как энтеральное питание). Множество различных катетеров, предназначенных для осуществления энтерального питания, было разработано за несколько лет, включая те, которые имеют «низкий профиль» относительно участка катетера, который находится на коже пациента, а также те, которые имеют более традиционную или не низкопрофильную конструкцию. Эти чрескожные транспортные катетеры или трубки часто именуются «гастростомические трубки», «чрескожные гастростомические катетеры», «PEG трубки» или «катетеры для энтерального питания».
Для предотвращения выпадения PEG трубки из желудка/стенки кишечника на удаленном конце катетера используются различные виды фиксаторов. Примеры обычных устройств, снабженных наконечниками Малекота или подобными им, встречаются, например, в Патенте США US №3915171, «Гастростомическая трубка», Shermeta; Патенте США US №4315513, «Гастростомия и другие чрезкожные транспортные трубки», Nawash и др.; Патенте США US №4944732 «Гастростомический канал», Russo; и Патенте США US №5484420, «Удерживающие втулки для чрескожных катетеров», Russo. Примерные коммерческие продукты включают в себя Passport® Низкопрофильное устройство гастростомии, поставляемое ф. Cook Medical, Inc., г. Блумингтон, Индиана и Mini One™ Non-Balloon Button (не содержащее баллона устройство), поставляемый ф. Applied Medical Technology, Inc., г. Брексвилль, Огайо. Недостаток этих устройств связан со способом введения и извлечения катетера или трубки, снабженных этими фиксирующими приспособлениями (например, гастростомической трубки), в полость тела, например в желудок.
Накачиваемые баллоны, вводимые в полость тела, могут быть использованы вместо этих обычных устройств, снабженных наконечниками Малекота или подобными расширяющими наконечниками. Накачиваемый баллон, обычно изготовленный из «мягкого» или эластомерного силикона медицинского класса, прикрепляется к концу катетера и из него выпускается воздух для введения его через стому, а затем в него накачивается воздух для удерживания блока энтерального питания на месте. Хотя они и обладают многими преимуществами, накачиваемые баллоны могут со временем начать пропускать воздух и спускаться. В дополнение, «мягкий» или эластомерный силикон медицинского класса имеет склонность со временем «сползать» или ослаблять натяжение, что может изменить размеры баллона.
Различные типы медицинских устройств, включающих в себя накачиваемые баллонные устройства, известны и широко используются в медицине. Например, в эндотрахеальных трубках и трахеостомических трубках используются накачиваемые баллоны для создания уплотнения, которое предотвращает проникновение слизи в легкие. Пилотные (контрольные) баллоны, манометры и индикаторы наполнения воздухом используются для обеспечения постоянного считывания давления в баллоне в этих устройствах. Таким образом, эти устройства обеспечивают вывод данных, которые постоянно или непрерывно передают информацию, показывающую повышение или понижение давления внутри баллона. Эти устройства описаны, например, в Патенте США US №3642005 «Эндотрахеальная трубка, снабженная надувной манжетой», McGinnis; в Патенте США US №4266550 «Индикаторы давления для катетеров, снабженных надувной манжетой», Bruner; в Патенте США US №6732734 «Пилотный баллон для катетеров, снабженных баллоном», Ogushi и др.; и в Патенте США US №7404329 «Манометр для использования в просвете дыхательных путей», Quinn и др.
Дополнительно к пилотным баллонам известны индикаторы давления, снабженные гофрированными мембранами или диафрагмами, а также известны электронные индикаторы давления. Например, простой мембранный индикатор давления для показа постоянного считывания давления жидкости описан в Патенте США US №3780693 « Индикатор видимого давления жидкости», Parr. В Патенте США US №7383736 «Устройство и способ измерения давления», Esnouf, описано мембранное устройство для использования совместно с баллоном ларингеальной маски или другим оборудованием для регулирования работы дыхательных путей, включающим в себя наполненные воздухом баллоны. Устройство Esnouf включает в себя гофрированные мембраны, которые смещаются в результате перепада давления между наружной частью мембран и внутренней частью мембран, чтобы обеспечить непрерывное считывание повышений и понижений давления жидкости в баллоне. В Патенте США US №7018359 «Внутренний индикатор давления надувной манжеты», Igarashi и др., описаны гофрированные мембраны или упругая структура для использования с баллоном трахеостомической трубки или эндотрахеальной трубки. Устройство Igarashi и др. соединено с баллоном посредством трубки для накачивания и имеет клапан накачивания на другом конце, который присоединен к шприцу. В устройстве используются гофрированные мембраны и/или упругий индикатор, обеспечивающие непрерывное считывание и показ повышения и понижения давления текучей среды внутри баллона путем движения гофрированных мембран вдоль цифровых шкал, отпечатанных на корпусе. В Патенте США US №5218970 «Узел контроля давления в манжете трахеальной трубки», Tumbull и др., описывается узел контроля давления для трахеальной трубки, включающий в себя электронный датчик давления, такой как, например, силиконовый тензометрический датчик давления, процессор, который выполняет различные операции по калибровке, масштабированию и расчету сигнала, поступающего с датчика и обеспечивает вывод на цифровой дисплей передаваемого непрерывного считывания повышений и понижений давления текучей среды, находящейся в баллоне.
Эти индикаторы применимы для устройств, предназначенных для дыхательных путей, где важен тщательный и постоянный контроль давления в баллоне. Для того чтобы должным образом герметизировать пространство между полостью трахеи и баллоном, существует тенденция излишнего накачивания баллона, что может привести к повреждению материала, из которого он изготовлен. Если давление слишком низкое, баллон не может должным образом герметизировать пространство между полостью трахеи и баллоном, таким образом позволяя выделениям поступать в легкие, вызывая тем самым пневмонию и другие респираторные осложнения. Для обеспечения тщательного контроля давления в баллоне эти пилотные баллоны, мембранные и диафрагмовые индикаторы и электронные датчики разработаны таким образом, чтобы передавать непрерывное считывание повышений и понижений давления текучей среды в баллоне.
Несмотря на то что такой уровень чувствительности и непрерывного считывания желателен, пилотные баллоны и подобные мембранные и диафрагмовые индикаторы относительно велики и обычно требуется навык и опыт для точной интерпретации выходных данных с этих обычных устройств, поскольку они обеспечивают непрерывное считывание показателей давления. Несмотря на то что электронные датчики давления точные и обычно легко считываются, они относительно велики и дорогостоящи. Уменьшение устройств такого вида до значительно меньшего размера, для того чтобы они могли быть использованы с низкопрофильной PEG трубкой, только подчеркивает проблемы, связанные с размером, калибровкой, точностью и считыванием или интерпретацией выходных данных с этих устройств.
В Патенте США US №6,878,130 «Внешний датчик накачки для низкопрофильной гастростомической трубки», Fournie и др., описывается внешний датчик накачки, подобный пилотному баллону, выполненный заодно с базовым гастростомическим устройством, снабженным фиксирующим баллоном. Устройство Fournie и др. обеспечивает непрерывное тактильное считывание состояния накачки фиксирующего баллона. В устройстве Fournie и соавторов используются два обычно имеющих вид пузырей участка, которые принимают обычно выпуклую форму, когда фиксирующий баллон накачан и обычно вогнутую форму, когда баллон не накачан. Изменение формы этих обычно имеющих форму пузыря участков, обеспечивает непрерывное тактильное показание или считывание состояния накачки баллона. Дополнительно внешний датчик накачки обеспечивает непрерывные визуальные показания состояния накачки фиксирующего баллона посредством использования разделяющей панели, отделяющей эти два обычно имеющих форму пузыря, участка датчика друг от друга. Разделяющая панель ощутимо разделяется по мере того, как баллон становится полностью накачан, для индикации состояния накачки. Такая непрерывная индикация состояния накачки важна для фиксирующих баллонов обычной PEG трубки, выполненных из эластичных материалов, таких как «мягкий» или эластомерный силикон медицинского класса, так как эти эластичные материалы должны растягиваться для увеличения объема баллона.
Относительно значительные изменения в давлении необходимы для растягивания таких эластичных материалов от нерастянутого состояния для того, чтобы растянуть баллон. Более того, соотношение между уровнем давления, необходимым для растягивания таких эластичных материалов, для того чтобы растянуть баллон, и объемом баллона является нелинейным. То есть и соотношение между давлением жидкости внутри баллона, и объем баллона не простое, что ведет к использованию конструкций непрерывных индикаторов, таких, какие описаны Fournie и др., при условии, что, вообще, используется какой-либо индикатор.
Например, на Фиг.1А показано стандартное устройство PEG трубки 10, снабженное основанием 12, фиксирующим баллоном 13, выполненным из обычного «мягкого» или эластомерного силикона медицинского класса в нерастянутом состоянии (т.е. в ненакачанном состоянии). Индикатор типа пилотного баллона 15, как, в основном, описано Fournie и соавторами, располагается в основании 12 стандартного устройства PEG трубки 10. Фиг.1В представляет собой изображение стандартного устройства PEG трубки 10, имеющего основание 12 и фиксирующий баллон 13, выполненный из стандартного «мягкого» или эластомерного силикона медицинского класса, который был растянут посредством накачивания до завышенного объема. Индикатор типа пилотного баллона 15, как в основном описано Fournie и др., располагается на основании 12 стандартного устройства PEG трубки 10. Фиг.1C представляет собой изображение, показывающее примерное соотношение между давлением текучей среды внутри такого эластичного фиксирующего баллона и объемом баллона во время растяжения стандартного «мягкого» или эластомерного силикона медицинского класса, формирующего баллон, путем повышения давления текучей среды внутри баллона. На рисунке представлены показатели давления, в зависимости от объема участка, для тонкой низкопрофильной подающей трубки, снабженной силиконовым баллоном, выпускаемой фирмой Kimberly-Clark® Mic-Key®. Как видно из Фиг.1C, растяжение таких эластичных баллонов от незначительного объема (т.е. ненакачанного состояния) при незначительном давлении до развернутого объема, в пределах от 3 до 5 миллиметров, требует в начальной стадии большого и непрерывного изменения давления для преодоления сопротивления растяжению. В этом примере, непосредственное изменение давления от нуля или незначительного давления до величин, находящихся в пределах от 4 до 7 фунтов на квадратный дюйм (от 28 до 48 килопаскалей), необходимо для преодоления сопротивления растяжению, требующемуся для накачивания таких примерных стандартных фиксирующих баллонов до объема, составляющего даже 1 кубический сантиметр (приблизительно 1 миллиметр), и необходимо давление в пределах от 5 до 10 фунтов на квадратный дюйм (от 34 до 69 килопаскалей) для накачивания таких стандартных «мягких» или эластомерных баллонов из силикона медицинского класса до объема, составляющего около 3 кубических сантиметров (~3 миллиметра) стерильной водой, хотя может быть использован физиологический раствор или воздух.
Включение индикатора типа пилотного баллона, как описано Fournie и др., или системы мембран, или подобного градуированного индикатора, как было описано выше, в базу низкопрофильного устройства, снабженного PEG трубкой, которое обеспечивает непрерывное считывание показателей давления, с которым сталкивались такие эластичные баллоны во время растягивания, требует наличия разделительных панелей, индикационных линий или подобных компонентов на гибкой мембране, что обеспечивает получение информации, основанной на очень небольших сдвигах - обычно, менее одного миллиметра. Использование такой мелкой шкалы для обеспечения считывания состояния накачки фиксирующего баллона создает трудности для должного считывания и обзора, особенно, если давление накачивания меньше 4 фунтов на квадратный дюйм (меньше 28 килопаскалей) Например, основание типовой низкопрофильной PEG трубки имеет, в среднем, 1,625 дюймов (~41 мм) в длину, в среднем, 0,75 дюйма (~19 мм) в ширину и, в среднем, 0,5 дюйма (~13 мм) в глубину. Обращаясь к Фиг.ID, которая аналогична Фиг.3 Патента, авторами которого являются Fournie и др., сравнение соответствующих размеров индикатора типа пилотного баллона 15, расположенного на основании 12 стандартного устройства, снабженного PEG трубкой 10 с размерами основания, указанными выше, создает контекст, из которого ясно, что малый размер индикатора типа пилотного баллона 15 будет непрактичным. Например, индикатору типа пилотного баллона следует иметь размеры, в среднем, 6 мм в длину, в среднем, 5 мм в ширину, а разделительной панели на индикаторе следует иметь ширину, в среднем, 0.8 мм (что приблизительно равно диаметру среднего размера шарика шариковой ручки или диаметру грифеля механического карандаша).
Соответственно, существует необходимость в блоке индикатора изменения давления, который может быть быстро введен в головку PEG трубки и который хорошо видим и считывается должным образом, а также работает при показателях давления менее 4 фунтов на квадратный дюйм (28 килопаскалей). Существует необходимость в блоке индикатора изменения давления, который может быть быстро установлен в PEG трубку и является простым, надежным и точным при определении заданных объемов, а также понятным в использовании. Также существует необходимость в создании блока индикатора изменения давления, который может быть быстро установлен в PEG трубку и является простым, надежным и точным при определении заданных параметров давления, а также понятным в использовании. Существует также неудовлетворенная потребность в блоке индикатора изменения давления, который передает простой и легко видимый, и понятный сигнал об изменении в развернутом баллоне, в частности, в баллоне, развернутом при давлении менее 4 фунтов на квадратный дюйм (28 килопаскалей).
В ответ на затруднения и проблемы, которые были обсуждены здесь, настоящее изобретение предлагает устройство баллонного катетера, включающее в себя индикатор, который обеспечивает дискретный визуальный сигнал, извещающий о состоянии накачки баллона, который соединен с катетером. Например, индикатор создает дискретный визуальный сигнал, извещающий о том, что объем баллона отличается от заданных объемов. Альтернативно и/или дополнительно, индикатор может создавать дискретный визуальный сигнал, извещающий о том, что давление текучей среды внутри баллона отличается от заданного уровня давления. Настоящее изобретение обеспечивает особое преимущество для снабженного баллоном катетерного устройства, которое заключается в том, что включает в себя баллон, имеющий заданный объем заполнения при относительно низких давлениях (например, 4 фунта на квадратный дюйм (28 килопаскалей) или менее).
В соответствии с одним из объектов изобретения снабженное баллоном катетерное устройство может представлять собой блока катетера энтерального питания, который включает в себя катетер, имеющий проксимальный конец, дистальный конец и стенки катетера, образующие полость катетера. Основание располагается на проксимальном конце катетера. Основание образует отверстие полость катетера. Само основание имеет первый конец и второй конец. Блок включает в себя накачиваемый баллон, расположенный на дистальном конце катетера. Характерным свойством накачиваемого баллона является то, что он имеет некоторый заданный объем заполнения. Такие надувные баллоны легко отличить от стандартных эластичных баллонов (например, из мягкого эластичного силикона), обычно используемых с катетерами энтерального питания. Вообще говоря, заданный объем заполнения равен или не превышает более чем в 1.5 раза (т.е. увеличение приблизительно на 50%) объем, получаемый путем растяжения баллона, имеющего первоначально сжатое, сложенное, нерастянутое состояние до состояния, в котором материал, из которого изготовлен баллон, становится ровным и полностью развернутым, но не достигая какого-либо значительного растяжения или расширения этого материала. Таким образом, заданный объем заполнения равен или не превышает более чем в 1,5 раза (т.е. увеличение приблизительно на 50%) объем баллона при его переходе от ненакачанного состояния к накачанному состоянию.
Блок включает в себя клапан накачивания воздухом, расположенный на базе. Клапан накачивания воздухом находится в жидкостном сообщении с баллоном. Это может быть осуществлено через полость накачивания, определяемую участком стенки катетера, проходящим от баллона к клапану накачивания. Рассматриваются также внешняя полость накачивания или другие конструкции. По желанию, клапан накачивания может быть расположен на первом конце базы.
Блок также включает в себя индикатор предварительного смещения, расположенный на основании, находящийся в жидкостном сообщении с баллоном. В соответствии с изобретением индикатор предварительного смещения выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что давление текучей среды в баллоне изменилось по сравнению заданным уровнем давления. Альтернативно и/или дополнительно, индикатор предварительного смещения выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона изменился по сравнению с заданным объемом. Например, индикатор предварительного смещения может быть выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона меньше, чем заданный объем заполнения.
Индикатор может быть расположен на втором конце основания. Предполагается, что индикатор может быть расположен на первом конце основания. В одном из объектов изобретения индикатор предварительного смещения может находиться в жидкостном сообщении с баллоном посредством полости индикатора, определяемой участком стенки катетера, проходящим от баллона к индикатору. Альтернативно и/или дополнительно, индикатор предварительного смещения может находиться в жидкостном сообщении с баллоном посредством полости индикатора, определяемой участком стенки катетера, проходящим от баллона к клапану накачивания и индикатору.
Индикатор предварительного смещения блока катетера энтерального питания может включать в себя корпус, имеющий первый конец, второй конец, одну или несколько стенок, определяющих внутренний канал и осевое измерение. Первый конец корпуса находится в жидкостном сообщении с накачиваемым баллоном. Желательно, чтобы, по меньшей мере, участок корпуса был прозрачным или полупрозрачным.
Индикатор предварительного смещения далее включает в себя гибкий рукав, расположенный во внутреннем канале корпуса. Гибкий рукав имеет первую поверхность, противоположную ей вторую поверхность, первый конец, расположенный во внутреннем канале корпуса, второй конец, соединенный с корпусом для создания непроницаемого для жидкости уплотнения, и гибкого обычно кольцевого участка, соединяющего первый конец и второй конец рукава.
В соответствии с изобретением гибкий обычно кольцевой участок гибкого рукава, образует скользящий кольцевой сгиб между первым концом и вторым концом рукава. Скользящий кольцевой сгиб выполнен таким образом, чтобы, по меньшей мере, один участок первой поверхности гибкого рукава являлся, как правило, прилегающим к одной или нескольким стенкам корпуса и, по меньшей мере, один участок второй поверхности гибкого рукава определял полость рукава. Вообще говоря, скользящий кольцевой сгиб перемещается по мере того, как рукав движется в аксиальном направлении корпуса. То есть движение гибкого рукава в аксиальном направлении является причиной того, что участок второй поверхности гибкого рукава выворачивается наружу или выворачивается наизнанку у скользящего кольцевого сгиба так, что он становится непосредственно смежным одной или нескольким стенкам корпуса.
Блок также включает в себя смещающий элемент, расположенный по меньшей мере частично внутри полости рукава и между первым концом корпуса и вторым концом корпуса. Смещающий элемент выполнен таким образом, чтобы деформироваться при определенной силе, которая соответствует заданному объему заполнения, так что гибкий рукав перемещается от первого осевого участка к по меньшей мере второму осевому участку, для обеспечения дискретного визуального сигнала, извещающего о том, что давление текучей среды в баллоне отлично от давления накачивания, которое соответствует заданному объему заполнения. Смещающий элемент представляет собой деформируемое устройство или компонент, который теряет свою форму под воздействием сжимающих усилий, однако восстанавливает свою первоначальную форму, когда сжимающие усилия устранены. Смещающий элемент может представлять собой пружину, например, цилиндрическую пружину, множество пружин, эластомерное тело и т.п. Смещающий элемент может иметь степень жесткости или степень деформации, или точку расцепления в пределах от 0,1 фунт-сила/дюйм до 1,0 фунт-сила/дюйм (от 0,1 ньютон/ем до 1,8 ньютон/ем), которая обеспечивает дискретный сигнал при изменении давления, в частности, для давления ниже 4 фунтов на квадратный дюйм (psi) (около 28 килопаскалей), например, для давления в пределах от 1 до 3,5 фунтов на квадратный дюйм (приблизительно, от 7 до 25 килопаскалей), или как в другом примере, для давления от 2 до 3 фунтов на квадратный дюйм (приблизительно от 14 до 21 килопаскалей).
Настоящее изобретение также касается устройства катетера, снабженного баллоном, которое состоит из катетера, имеющего проксимальный конец, дистальный конец и стенки катетера, образующие полость катетера; основания расположенного на проксимальном конце катетера, образующего отверстие полости катетера; накачиваемого баллона, имеющего заданный объем заполнения, причем баллон расположен на конце катетера и выполнен таким образом, чтобы содержать в себе текучую среду под давлением; клапан накачивания, расположенный на основании, причем клапан накачивания находится в жидкостном сообщении с баллоном; и индикатора предварительного смещения, находящегося в жидкостном сообщении с баллоном. В соответствии с изобретением индикатор предварительного смещения выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что давление текучей среды в баллоне изменилось по сравнению с заданным уровнем давления. Альтернативно и/или дополнительно индикатор предварительного смещения выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона изменился по сравнению с заданным объемом. Например, индикатор предварительного смещения может быть выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона меньше, чем заданный объем заполнения.
Настоящее изобретение касается индикаторного блока для использования в медицинских устройствах, снабженного баллоном, который содержит жидкость под давлением. Индикаторный блок, особенно для медицинских устройств, снабжен головкой, расположенной снаружи тела человека, и акачиваемым фиксирующим баллоном, разворачивающимся внутри полости в теле человека. Индикаторный блок включает в себя накачиваемый тонкостенный баллон, имеющий заданный объем накачивания. Баллон выполнен таким образом, чтобы в нем могла содержаться текучая среда под давлением после накачивания до его заданного объема накачивания, и после накачивания дополнительно выполнен таким образом, чтобы содержать резервный объем текучей среды, который меньше заданного объема накачивания, когда текучая среда больше не находится под давлением. Желательно, чтобы давление текучей среды после накачивания являлось относительно низким давлением (например, 4 фунта на квадратный дюйм (28 килопаскалей) или меньше).
Индикаторный блок также включает в себя индикатор предварительного смещения, который обеспечивает только первый дискретный визуальный сигнал, когда баллон накачан до его заданного объема заполнения,и второй дискретный визуальный сигнал, когда текучая среда в баллоне больше не находится под давлением, не обеспечивая никакого сигнала, оповещающего о других промежуточных состояниях накачивания. Таким образом, индикатор предварительного смещения обеспечивает сигнал, оповещающий только о двух состояниях баллона - что он находится в состоянии заданного объема заполнения и что текучая среда внутри баллона больше не находится под давлением. В соответствии с изобретением второй дискретный визуальный сигнал предупреждает о том, что объем баллона достиг резервного объема, который обычно соответствует объему баллона при переходе от его нерастянутого состояния к растянутому состоянию, когда баллон больше не находится под давлением или находится около нижнего предела заданного объема заполнения. В общем, предпочтительно, чтобы заданный объем заполнения находился в диапазоне от около резервного объема (т.е. чуть больше резервного объема) до величины, приблизительно в 1,5 раза превышающей резервный объем (т.е. от приблизительно резервного объема до объема, приблизительно на 50% превышающего объем баллона при переходе от нерастянутого состояния к растянутому состоянию). Например, заданный объем заполнения может быть в пределах от 1,01 раза до 1,4 раза больше, чем резервный объем (т.е. от около 1 процента до около 40 процентов больше, чем объем баллона при переходе от нерастянутого состояния к растянутому состоянию). В качестве другого примера заданный объем заполнения может быть от около 1,05 раза до около 1,3 раза больше, чем резервный объем (т.е. от около 5 процентов до около 30 процентов больше, чем объем баллона при переходе от нерастянутого состояния к растянутому состоянию).
ОПРЕДЕЛЕНИЯ
Используемые здесь следующие термины имеют определенное значение, если контекст не требует другого значения, или другое значение не применяется, также единственное число обычно относится и к множественному числу, а множественное число обычно относится к единственному числу, если другое не указано.
Подразумевается, что используемый здесь термин «состоять», «состоит», «состоящий» и другие производные от корневого термина «состоять» являются допускающими изменения терминами, которые указывают на присутствие любых определенных деталей, элементов, целых элементов, этапов или компонентов, но не препятствует присутствию или добавлению одной или нескольких других деталей, элементов, целых элементов, этапов, компонентов или их групп. Подобным же образом, предполагается, что термины « включать в себя», «включает в себя», «включающий в себя», так же как и термины «имеет», «иметь», «имеющий» и производные от них истолковываются также как и слово «состоять» и предполагается, что они являются допускающими изменения терминами, которые указывают на присутствие любых определенных деталей, элементов, целых, этапов или компонентов, но не препятствуют наличию или добавлению одной или нескольких деталей, элементов, целых элементов, этапов или компонентов или их групп.
Используемое здесь выражение «жидкостное сообщение» означает пропускание или проход между двумя точками и/или двумя конструкциями для осуществления конкретной цели. В этом примере жидкостное сообщение будет представлять собой проход, который позволяет пропускать жидкости и/или газы.
Используемый здесь термин «соединение» включает в себя, но не ограничивается этим, присоединение, соединение, скрепление, сцепление, связывание, склеивание (при помощи адгезива) или связывание двух деталей неразрывно или с включением одной в другую.
Используемый здесь термин «конфигурировать» или «конфигурация» и их производные означают конструировать, компоновать, настраивать или обозначают форму для конкретного применения или использования. Например, военный автомобиль, который был сконструирован для применения на пересеченной местности; настроить компьютер, установив параметры системы.
Используемый здесь термин «существенный» или «по существу» относится к чему-то, выполненному в большом объеме или степени; в существенном или большом количестве;
например, используемый здесь термин «по существу» применительно к выражению «по существу покрыт» означает, что предмет покрыт, по меньшей мере, на 70%.
Используемый здесь термин «выравнивать», «выровненный» и/или «выравнивание» относится к пространственному свойству, которым обладает расположение или положение предметов, выстроенных в прямую линию.
Используемые здесь термины «ориентация» или «положение» используются взаимозаменяемо и относятся к пространственному свойству места, в котором что-то расположено, или способа, которым что-то располагается, например «положение стрелок на часах».
Используемый здесь термин «около», стоящий с установленным числом, относится к величине, которая находится в пределах плюс-минус десять (10) процентов от установленного числа.
Используемый здесь термин «нерастянутый», при использовании в отношении баллона катетера, относится к баллону катетера, который не имеет приложения радиального давления к внутренней поверхности баллона, превышающего атмосферное давление или давление окружающей среды, непосредственно прилегающей к наружной части баллона. Нерастянутые баллоны катетера включают в себя, например, баллон катетера, который не содержит текучей среды или который содержит текучую среду, которая не находится под давлением или ее давление меньше или равно атмосферному давлению или давлению окружающей среды, непосредственно прилегающей к наружной части баллона. Напротив, термин «растянутый» при использовании в отношении баллона катетера относится к баллону катетера, подвергающемуся давлению, приложенному к внутренней поверхности баллона, которое превышает атмосферное давление или давление окружающей среды, непосредственно прилегающей к наружной части баллона, например, давлению, вызванному текучей средой (например, находящейся под давлением жидкостью или газом), содержащейся внутри баллона катетера.
Используемый здесь термин «заданный объем заполнения», при использовании в отношении баллона катетера, относится к объему в диапазоне с нижним пределом при переходе от нерастянутого состояния к растянутому состоянию, где текучая среда внутри баллона сначала находится под давлением, и верхним пределом, который не превышает больше чем в полтора раза (1,5 раза) (т.е. приблизительно на 50% больше) объем баллона при переходе от нерастянутого состояния к растянутому состоянию. Например, заданным объемом заполнения может быть объем баллона при переходе от нерастянутого состояния к растянутому состоянию и может охватывать объем превышающий в 1,4 раза (т.е. приблизительно на сорок процентов (40%) больше) объем баллона при переходе от нерастянутого состояния к растянутому состоянию. В качестве другого примера заданным объемом заполнения может быть объем баллона при переходе от нерастянутого состояния к растянутому состоянию до объема, превышающего в 1,2 раза (т.е. приблизительно на двадцать процентов (20%) больше) объем баллона при переходе от нерастянутого состояния к растянутому состоянию.
Принято, что стандартные эластичные баллоны, которые непрерывно растягиваются с возрастающим давлением, не имеют заданного объема заполнения. Хотя существует возможность характеризовать некоторые эластичные баллоны, как имеющие переход от нерастянутого состояния к растянутому состоянию, такой переход происходит только во время раннего приложения давления для начала растягивания или длительного (непрерывного) растягивания материала, из которого изготовлен баллон.
Эти термины могут быть определены дополнительно в остальных разделах описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг.1A - вид в перспективе примерного устройства, известного в уровне техники.
Фиг.1B - вид в перспективе примерного устройства, известного в уровне техники.
Фиг.1C - график функций стандартного известного в уровне техники устройства.
Фиг.1D - вид сверху стандартного известного в уровне техники устройства.
Фиг.2A - вид в перспективе примерного блока катетер для энтерального питания, включающего в себя индикатор.
Фиг.2B - вид в перспективе деталей примерного блока катетера для энтерального питания, включающего в себя индикатор.
Фиг.3 - вид сбоку, в сечении, показывающий примерный блок катетера для энтерального питания.
Фиг.4 - вид в перспективе, показывающий вид в сечении детали отличающегося элемента от примерного блока катетер энтерального питания, включающего в себя индикатор.
Фиг.5A и 5B - виды в перспективе, показывающие в сечении детали отличающегося элемента от примерного блока катетера энтерального питания, включающего в себя индикатор.
Фиг.6A и 6B - виды в перспективе, показывающие детали примерного блока катетера энтерального питания, включающего в себя индикатор.
Фиг.7A и 7B - графики функций примерного блока катетера энтерального питания, включающего в себя индикатор.
ОПИСАНИЕ ИЗОБРЕТЕНИЯ
Изобретение(ия), описанное здесь, относится, в общем, к улучшенному медицинскому обслуживанию пациентов, которым требуется энтеральное питание. Более конкретно, изобретение(ия), описанное здесь, относится к блоку энтерального питания, включающему в себя накачиваемый баллон, имеющий заданный объем заполнения, для удерживания, по меньшей мере, участка блока в полости в теле и, кроме того, включающего в себя индикатор, который обеспечивает дискретный визуальный сигнал, извещающий о том, что давление в баллоне отличается от заданного уровня давления. Изобретение(ия), описанное здесь, может также включать в себя индикаторное устройство для использования совместно с медицинскими устройствами, включающее в себя накачиваемые баллоны, где индикаторное устройство включает в себя накачиваемый баллон, имеющий заданный объем заполнения и, кроме того, включающее в себя индикатор, который обеспечивает дискретный визуальный сигнал, извещающий о том, что давление в баллоне отличается от заданного уровня давления.
Теперь будет представлено подробное описание одного или нескольких вариантов изобретения, примеров изобретения, которые показаны на чертежах. Каждый пример и вариант представлен в виде объяснения изобретения и не предполагает ограничения изобретения. Например, детали, показанные или описанные как часть одного варианта, могут быть использованы в другом варианте, что дает еще один дополнительный вариант. Предполагается, что изобретение включает те или иные модификации и варианты как соответствующие цели и объему изобретения.
Теперь, обращаясь к чертежам, что настоящее изобретение, в общем, представлено на Фиг.2A-7B блок катетера энтерального питания 20 включает в себя индикатор предварительного смещения 22, который обеспечивает дискретный визуальный сигнал, извещающий о том, что давление в баллоне 24, соединенном с катетером 26, отличается от заданного уровня давления. Альтернативно и/или дополнительно, индикатор предварительного смещения 22 может быть выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал о том, что объем баллона 24 изменился по сравнению с заданным объемом. Например, индикатор предварительного смещения 22 может быть выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона 24 меньше заданного объема заполнения.
Блок катетера энтерального питания 20 включает в себя катетер 26, имеющий проксимальный конец 28, дистальный конец 30 и стенки катетера 32, образующие полость катетера 34. Основание 36 расположено на проксимальном конце 28 катетера 26. Основание 36 образует отверстие 40 в полость катетера 34. Само основание имеет первый конец 42 и второй конец 44. Блок 10 включает в себя накачиваемый баллон 24, расположенный на дистальном конце катетера. Характерным свойством накачиваемого баллона 24 является то, что он имеет заданный объем заполнения. Как было отмечено выше, такие накачиваемые баллоны, имеющие заданный объем заполнения, легко отличить от стандартных эластичных баллонов. В общем, во время растяжения баллона, имеющего изначально сжатое или сложенное состояние, как, в общем, показано на Фиг.2B, до точки, в которой материал, из которого выполнен баллон, становится гладким и развернутым, как, в общем, показано на Фиг.2A, заданным объемом заполнения является объем, находящийся в диапазоне, имеющем нижний предел, равный объему, при котором материал, который формирует баллон, впервые становится гладким, развернутым и находится под давлением, но не достигает какого-либо растяжения или надувания этого материала, а верхний предел не превышает 50%-ого увеличения объема по сравнению с нижним пределом. Другими словами, заданный объем заполнения является объемом, находящимся в диапазоне с нижним пределом, в точке перехода баллона от ненакачанного состояния к накачанному состоянию и верхним пределом, который не превышает полутократного (1,5 раз) (т.е. на пятьдесят процентов (50%) больше чем) объема баллона при переходе от ненакачанного состояния к накачанному состоянию. Объем у нижнего предела этого диапазона, где давление текучей среды в баллоне, по существу, равно нулю, является «резервным объемом».
Блок 20 включает в себя клапан накачивания 46, расположенный на основании. Клапан накачивания 46 находится в жидкостном сообщении с баллоном 24. Это может быть осуществлено через полость накачивания 48, образуемую участком стенки 32 катетера 26, проходящим от баллона 24 к клапану накачивания 46. Могут применяться внешняя полость накачивания или другие конструкции. Клапан накачивания может, по необходимости, располагаться на первом конце 42 основания.
Индикатор предварительного смещения 22 расположен на основании 36 в жидкостном сообщении с баллоном 24. В соответствии с изобретением индикатор предварительного смещения 22 выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что давление текучей среды в баллоне изменилось по сравнению с заданным уровнем давления. Альтернативно и/или дополнительно, индикатор предварительного смещения 22 может быть выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона 24 изменился по сравнению с первоначальным объемом. Например, индикатор предварительного смещения 22 может быть выполнен таким образом, чтобы обеспечивать дискретный визуальный сигнал, извещающий о том, что объем баллона 24 меньше заданного объема заполнения.
Индикатор 22 может быть расположен на втором конце 44 основания 36. Рассматривается и вариант, при котором индикатор 22 может быть расположен на первом конце 42 основания и прикреплен параллельно клапану накачивания 46 или в какой-нибудь другой компоновке. Индикатор предварительного смещения 22 может находиться в жидкостном сообщении с баллоном 24 через полость индикатора 50, образуемую участком стенки 32 катетера 26, проходящим от баллона 24 к индикатору 22. Альтернативно и/или дополнительно индикатор предварительного смещения может находиться в жидкостном сообщении с баллоном через полость накачивания, образуемую участком стенки катетера, проходящим от баллона к клапану накачивания и индикатору.
На Фиг.4 показан вид в сечении примерного индикатора предварительного смещения 22 блока катетера энтерального питания 10 в разобранном виде. Индикатор предварительного смещения 22 включает в себя корпус 52. Корпус 52 может быть выполнен цельным. Альтернативно и как показано на Фиг.4, корпус 52 может быть собран из множества секций. Например, корпус 52 может быть сформирован из линз 54 и колпачка 56. Говоря в общем, корпус 52 имеет первый конец 58, второй конец 60, одну или несколько стенок 62, образующих внутренний канал 64 и осевой размер «A». Первый конец 58 корпуса 52 находится в жидкостном сообщении с накачиваемым баллоном 24. Желательно, чтобы, по меньшей мере, один участок корпуса 52 был прозрачным или полупрозрачным. Например, линза 54 может быть прозрачной или полупрозрачной.
Индикатор предварительного смещения 22, кроме того, включает в себя гибкий рукав 66, расположенный во внутреннем канале 64 корпуса 52. Гибкий рукав 66 имеет первую поверхность 68, противоположную ей вторую поверхность 70, первый конец 72, расположенный во внутреннем канале корпуса, второй конец 74, соединенный с корпусом 52 для создания непропускающего жидкость уплотнения и гибкого обычно кольцевого участка 76, соединяющего первый конец 72 и второй конец 74 рукава.
В соответствии с изобретением гибкий, обычно кольцевой, участок 76 гибкого рукава образует свернутую кольцевую складку 78, находящуюся между первым концом 72 и вторым концом 74 рукава. Свернутая кольцевая складка 78 выполнена таким образом, чтобы, по меньшей мере, один участок первой поверхности 68 гибкого рукава был по существу приближен к одной или нескольким стенкам корпуса 62 и, по меньшей мере, один участок второй поверхности 70 гибкого рукава образовывал полость рукава 80. Говоря в общем, свернутая кольцевая складка 78 перемещается или движется по мере того, как первый конец 72 рукава 66 перемещается вдоль осевого направления или размера «A» корпуса 52. Таким образом, движение первого конца 72 гибкого рукава 66 вдоль осевого направления «A» вызывает выворачивание наизнанку участка второй поверхности 70 гибкого рукава у свернутой кольцевой складки 78, так, что она становится непосредственно приближенной к одной или нескольким стенкам корпуса 62.
Индикатор предварительного смещения 22 также включает в себя смещающий элемент 82, расположенный, по меньшей мере, частично в полости рукава 80 и между первым концом 58 корпуса и вторым концом 60 корпуса. Смещающий элемент 82 выполнен таким образом, чтобы он деформировался при приложении первоначального давления или силы с тем, чтобы гибкий рукав 72 двигался от первого осевого положения к, по меньшей мере, второму осевому положению. Давление или усилие прикладывается к первому концу 72 гибкого рукава 66. Первый конец 72 находится в жидкостном сообщении с накачиваемым баллоном через полость индикатора или, в некоторых вариантах выполнения, полость накачивания. Часть этого движения гибкого рукава показана на виде в сечении на Фиг.5A и Фиг.5B.
На Фиг.5А изображен вид в сечении гибкого рукава 66, показывающий смещающий элемент 820, расположенный, по меньшей мере, частично внутри полости рукава 80, образованный гибким кольцевым участком 76 до деформации смещающего элемента. В таком варианте выполнения первый конец 72 гибкого рукава 66 находится в первом аксиальном положении «P». Второй конец 74 гибкого рукава 66 находится рядом со свернутой кольцевой складкой 78 и относительно удален от первого конца 72 рукава 66.
На Фиг.5 В изображено сечение гибкого рукава 72, показывающее смещающий элемент 82, расположенный, по меньшей мере, частично внутри полости рукава 80, образуемый гибким кольцевым участком 76 после деформации смещающего элемента. В таком варианте выполнения первый конец 72 гибкого рукава 66 находится во втором аксиальном положении «D». Второй конец 74 гибкого рукава 66 находится относительно удаленно от свернутой кольцевой складки 78 и относительно приближенно к первому концу 72 рукава 66.
В процессе обычного использования блока энтерального питания пользователь использует шприц для добавления стерильной воды или какой-либо другой соответствующей жидкости или, в некоторых ситуациях, воздуха, подаваемого через клапан накачивания для заполнения баллона. Смещающий элемент 82 индикатора предварительного смещения деформируется под воздействием силы (т.е. давления текучей среды) у первого конца 72 гибкого рукава, сообщающегося с баллоном через полость индикатора (или, в некоторых вариантах выполнения, воздуховод). Это давление текучей среды создается путем заполнения баллона после достижения «резервного объема» при переходе от ненакачанного состояния к накачанному состоянию, в тот момент, когда давление текучей среды внутри баллона возрастает, обычно в линейном отношении давление - объем, пока давление баллона не достигнет заданного уровня давления, при котором смещающий элемент изменяет форму. Заданный уровень давления соотносится с заданным объемом заполнения, который является объемом, находящимся в диапазоне с нижним пределом, соответствующим объему баллона при переходе от ненакачанного состояния к накачанному состоянию, где текучая среда в баллоне впервые подвергается воздействию давления и верхним пределом, не превышающим более чем в полтора раза (1,5 раза) (т.е. на 50% больше) объем баллона при переходе из ненакачанного состояния к накачанному состоянию.
Деформация смещающего элемента вызывает движение гибкого рукава от его первого осевого положения «P» к его второму осевому положению «D». Результат этого движения, от первого осевого положения ко второму осевому положению, изображен на виде в перспективе на Фиг.6A и 6B. На Фиг.6A изображен блок катетера энтерального питания 20, включающий в себя индикатор предварительного смещения 22. На этом чертеже изображен смещающий элемент, который деформировался под воздействием давления в накачиваемом баллоне (не показан на этой Фиг.6A) таким образом, что гибкий рукав не виден в индикаторе предварительного смещения 22. Более конкретно, гибкий рукав 66 находится во втором аксиальном положении «D», как, в общем, показано на Фиг.5B. Колпачок 56, гибкий рукав 66 и смещающий элемент 82 подобраны по размеру таким образом, что гибкий рукав 66 не был виден через колпачок 56, который, по возможности, выполнен непрозрачным, когда гибкий рукав находится во втором аксиальном положении «D». Это движение гибкого рукава ко второму осевому положению «D», где он не видим, обеспечивает очень простое и надежное определение пользователем, что давление текучей среды в баллоне отличается от (т.е. выше) заданного уровня давления. Альтернативно и/или дополнительно, движение гибкого рукава ко второму осевому положению «D», где его нельзя легко увидеть, обеспечивает для пользователя очень простое и надежное определение того, что объем баллона соответствует или превышает заданный объем заполнения. После того как гибкий рукав 66 герметизирован и соединен с корпусом 52 для формирования уплотнения, вентиляционное устройство 96, предназначенное для поддержания атмосферного давления в полости рукава 80, образуемое гибким кольцевым участком 76 гибкого рукава, располагается на втором конце корпуса 60. Вентиляционное устройство 96 может представлять собой отверстие, множество отверстий, щель, множество щелей, обладающую высокой пористостью, губчатую область и т.п. Вентиляционное устройство 96 позволяет осуществлять прохождение воздуха внутрь и из полости рукава 80, образуемой второй поверхностью 70 гибкого рукава у гибкого кольцевого участка 76, расположенного во внутреннем канале 64 корпуса. Прохождение воздуха через вентиляционное устройство 96 является ответным действием на осевое движение гибкого рукава.
В одном из объектов изобретения гибкий рукав может включать в себя пластину 90, присоединенную к штифту 92, который выполнен таким образом, чтобы входить в гнездо 94, выполненное в первом конце 72 гибкого рукава. Эта пластина и соединенные с нею штифт и гнездо могут быть использованы для обеспечения некоторой стабильности размеров первого конца 72 гибкого рукава, который находится в жидкостном сообщении с баллоном и который подвергается давлению, которое передается на смещающий элемент. Пластина 90 может также быть выполнена имеющей одинаковый цвет с материалом второго конца 60 корпуса 52 (например, колпачка 56, если используется двухкомпонентный корпус), таким образом, когда смещающий элемент деформируется и гибкий рукав находится в своем втором аксиальном положении «D», материал, из которого изготовлен первый конец 72 гибкого рукава, нельзя легко увидеть, потому что он спрятан под пластиной 90 и сливается со вторым концом 60 корпуса 52, так что пользователь не может неверно истолковать положение рукава, основываясь на видимом присутствии цвета материала, из которого изготовлен гибкий рукав.
Теперь обратимся к Фиг.6B, на которой представлен блок катетера энтерального питания 20, включающего в себя индикатор предварительного смещения 22 в другой конфигурации. На этом чертеже смещающий элемент 82 индикатора предварительного смещения 22 больше не деформируется под воздействием давления в накачиваемом баллоне (не показан на Фиг.6A). В этой конфигурации гибкий рукав виден через корпус и создает компонент для легкой интерпретации сигнала. Более конкретно, гибкий рукав 66 находится в первом аксиальном положении «P», как в общих чертах показано на Фиг.5A. Если корпус 52 собран из двух или нескольких деталей, таких как, например, линзы 54 и колпачка 56, эти компоненты и гибкий рукав 66 и смещающий элемент 82 подобраны по размеру таким образом, чтобы гибкий рукав 66 был видим через линзу 54, которую, желательно, выполнять прозрачной или полупрозрачной, когда давление текучей среды в баллоне падает ниже заданного уровня и смещающий элемент 82 растягивается, что заставляет первый конец 72 гибкого рукава 66 двигаться в обратном направлении по внутреннему каналу 64 к первому концу 58 корпуса 52. Другими словами, когда давление текучей среды в баллоне падает ниже заданного давления смещающего элемента, смещающий элемент толкает гибкий рукав в обратном направлении, возвращая его в первое осевое положение, где пользователь может видеть гибкий рукав, и легко понять сигнал, извещающий о том, что давление в баллоне упало ниже заданного уровня. Это движение гибкого рукава к первому осевому положению «P», где его легко можно увидеть, обеспечивает очень простой и надежный для пользователя показатель того, что давление текучей среды в баллоне отличается от (т.е. ниже) заданного уровня давления. Альтернативно и/или дополнительно, движение гибкого рукава к первому осевому положению «P», где он легко видим, обеспечивает очень простой и надежный для пользователя показатель того, что объем баллона ниже или меньше, чем заданный объем заполнения.
Желательно, чтобы гибкий рукав был изготовлен из мягкого, гибкого материала. Примерные материалы включают полиуретан, силикон и другие эластичные материалы, но не ограничиваются ими. Предпочтительно, чтобы материал обладал памятью своей формы. Приемлемые материалы включают в свое число «мягкие» или эластомерные силиконовые полимеры медицинского класса и «мягкие» или эластомерные полимеры полиуретана медицинского класса, но не ограничиваются ими. «Мягкие» полимеры могут иметь твердость A по Шору в пределах от 20 до 60, желательнее, в пределах от 30 до 50. Тестирование мягких пластиков на твердость по Шору наиболее часто проводится при помощи Теста Шора (Дюрометр) с использованием либо шкалы Шора A, либо шкалы Шора D. Шкала Шора A используется для «более мягких» полимеров, в то время как шкала Шора D используется для «более твердых». Твердость А по Шору соответствует твердости эластичных материалов, таких как полимер или мягкие пластики, и может быть определена при помощи инструмента, называемого Дюрометр Шора A. Если наконечник полностью проникает в образец, полученный показатель - 0, а если проникновения внутрь не происходит, в результате получается показатель 100. Этот показатель является безразмерным.
Жесткость по Шору измеряется при помощи прибора, известного как дюрометр и иногда именуемого дюрометр жесткости. Уровень жесткости определяется степенью проникновения нижней части наконечника дюрометра в образец. По причине упругости полимеров и пластиков показатель жесткости может изменяться с течением времени, поэтому время определения твердости иногда указывается вместе с числом жесткости. Номер теста ASTM - ASTM D2240, в то время как аналогичный ISO метод тестирования - ISO 868.
Гибкий рукав может иметь краситель или пигмент, введенный в материал, формирующий рукав. Альтернативно и/или дополнительно, гибкий рукав может иметь покрытие или слой краски на внешней поверхности рукава или на внутренней поверхности рукава. Например, гибкий рукав может включать в себя или быть покрыт обычно яркой, флуоресцентной краской, которая легко видима и проста для распознавания. Примеры таких красок включают в себя желтую, оранжевую, синюю, зеленую, красную, фиолетовую краски с различной степенью насыщенности и их сочетания, но не ограничиваются ими.
В одном из вариантов изобретения гибкий рукав может иметь первый краситель, такой как, например, зеленый, наносимый на его вторую поверхность 70, и второй краситель, такой как, например, красный, наносимый на его первую поверхность 68. Корпус 52 может быть прозрачным, для того чтобы, когда гибкий рукав находится во втором осевом положении «D», гибкий рукав выворачивается у свернутой кольцевой складки 78, таким образом, что цвет второй поверхности 70 (например, зеленый) виден в первую очередь, а цвет первой поверхности 68 (например, красный) виден минимально или не виден вообще. Это движение гибкого рукава ко второму осевому положению «D», где цвет второй поверхности 70 (например, зеленый) виден в первую очередь, а цвет первой поверхности 68 (например, красный) виден минимально или не видим вообще, обеспечивает очень простое и надежное определение пользователем того, что давление текучей среды внутри баллона отличается от (т.е. выше) заданного уровня давления. Альтернативно и/или дополнительно, движение гибкого рукава ко второму осевому положению «D», где цвет второй поверхности 70 (например, зеленый) виден в первую очередь, а цвет первой поверхности 68 (например, красный) виден минимально или не виден вообще, обеспечивает очень простое и надежное определение пользователем того, что объем баллона соответствует или превышает заданный объем заполнения.
В таком варианте корпус 52 может быть прозрачным, так что, когда гибкий рукав находится в первом аксиальном положении «P», гибкий рукав выворачивается наизнанку у свернутой кольцевой складки 78 таким образом, что вторая поверхность 70 (например, зеленая) видима минимально или не видима вообще, а цвет первой поверхности 68 (например, красный) виден в первую очередь. Это движение гибкого рукава к первому осевому положению «P», где цвет второй поверхности 70 (например, зеленый) видим минимально или не видим вообще, а цвет первой поверхности 68 (например, красный) виден в первую очередь, обеспечивает очень простое и надежное определение пользователем того, что давление текучей среды в баллоне отличается от (т.е. ниже) заданного уровня давления. Альтернативно и/или дополнительно, движение гибкого рукава к первому осевому положению «P», где цвет второй поверхности 70 (например, зеленый) виден минимально или не видим вообще, а цвет первой поверхности 68 (например, красный) виден в первую очередь, обеспечивает пользователю очень простое и надежное определение того, что объем баллона ниже или меньше заданного объема заполнения.
В соответствии с одним из объектов изобретения гибкий рукав 66 и другие компоненты индикатора предварительного смещения 22 могут быть подобраны по размеру таким образом, чтобы, в общем, соответствовать головке 36 блока 20 энтерального питания. Например, гибкий рукав 66 может иметь длину от первого конца 72 до наиболее удаленного наружного предела свернутой кольцевой складки 78 по направлению ко второму концу 60 корпуса 52, величина которой может находиться в диапазоне от 6 мм до 12 мм. В качестве другого примера рукав индикатора может иметь длину от первого конца 72 до наиболее удаленного предела свернутой кольцевой складки 78, составляющую от 7 мм до 11 мм. В качестве еще одного примера, рукав индикатора может иметь длину от первого конца 72 до наиболее удаленного предела свернутой кольцевой складки 78, составляющую от 8 мм до 10 мм.
Диаметр гибкого рукава может составлять от 2 мм до 10 мм. Например, диаметр гибкого рукава может составлять от 3 мм до 9 мм. В качестве другого примера диаметр гибкого рукава может составлять от 4 мм до 6 мм. Несмотря на то что диаметр предполагает круглое поперечное сечение, рассматриваются и другие геометрические формы поперечного сечения. Например, гибкий рукав может иметь эллиптическое поперечное сечение, овальное поперечное сечение или даже шестиугольное поперечное сечение, восьмиугольное поперечное сечение или другое подобное, если такие поперечные сечения не препятствуют движению свернутой кольцевой складки или свернутой кольцевой складки в случае применения некруглой геометрической формы. Для целей, определяемых настоящим изобретением, термин свернутая кольцевая складка охватывает свернутые кольцевые складки, которые основаны на некруглых геометрических формах до предела, когда такие геометрические формы позволяют свернутой складке выворачивать наизнанку гибкий рукав и функционировать, как описано выше.
В одном объекте изобретения допустимо, чтобы диаметр гибкого рукава не был единообразным. Например, диаметр гибкого рукава может быть меньше у первого конца 72 гибкого рукава и увеличиваться по направлению ко второму концу 74 гибкого рукава ближе к свернутой кольцевой складке 78, если такое изменение диаметра не препятствует нормальному функционированию свернутой кольцевой складки. Рассматриваются и другие не единообразные диаметры гибкого рукава, если они не препятствуют работе рукава и свернутой кольцевой складки.
Гибкий рукав может выть выполнен таким образом, чтобы величина его перемещения находилась в пределах от 3 до 10 мм. Это означает, что перемещение первого конца 72 гибкого рукава от его первого осевого положения «P» к его второму осевому положению «D» может находиться в диапазоне от 3 до 10 мм. Большее расстояние обеспечивает большую видимость гибкого рукава и более заметный сигнал. Меньшее расстояние требует более компактного индикатора предварительного смещения. Например, перемещение первого конца 72 гибкого рукава от его первого осевого положения «P» к его второму осевому положению «D» может находиться в диапазоне от 4 до 7 мм. В качестве другого примера перемещение первого конца 72 гибкого рукава от его первого осевого положения «P» к его второму осевому положению «D» может находиться в пределах от 4 до 5 мм.
Предпочтительно смещающий элемент 82 выполнен в виде пружины, такой как, например, цилиндрическая сжатая пружина. Рассматриваются варианты других упругих конструкций, которые могут быть использованы в качестве смещающего элемента. Они включают в себя гибкие, эластичные пены, металлические полосы, спиральные или секаторные пружины, конические пружины и т.п. Описание конических пружин можно найти, например, в Патенте США US №4111407 «Коническая сжатая пружина». Говоря в общем, смещающий элемент 82 предпочтительно выполнен в виде цилиндрической сжатой пружины, которая может определяться, как обладающая линейным движением, и размер пружины такой, что пружина быстро деформируется под воздействием очень малого диапазона давления для обеспечения очень обособленного сигнала, извещающего о том, что давление текучей среды в баллоне отличается от заданного давления пружины.
Смещающий элемент может, при необходимости, быть подобран по размеру таким образом, чтобы он был почти равен полному сжатию или жесткому сжатию (включая любую возможность для максимального сближения витков пружины или подобного свойства для других упругих структур) в точке, в которой или сразу за которой гибкий рукав достигает своего второго осевого положения «D». Предпочтительно смещающий элемент подобран по размеру таким образом, чтобы он был почти равен жесткому сжатию или полному сжатию в точке, которая позволяет гибкому рукаву значительно сжиматься для того, чтобы он достигал своего второго осевого положения «D» и становился невидимым, войдя во второй конец 60 корпуса 52, одновременно создавая поддерживающий столбик для гибкого рукава 66 так, чтобы перемещение гибкого рукава далеко за пределы второго осевого положения «D» было ограничено. Эта характеристика служит для предотвращения довольно большого растяжения гибкого рукава по направлению ко второму концу 60 корпуса, что ведет к полному выворачиванию или переворачиванию наизнанку и уничтожению свернутой кольцевой складки 78. Если свернутая кольцевая складка будет уничтожена, индикатор не сможет нормально работать и может не позволить гибкому рукаву 66 двигаться в обратном направлении к его первому осевому положению «P», что обусловлено тем, что давление текучей среды в баллоне ниже, чем первоначальный уровень давления смещающего элемента, так как вывернутый наизнанку гибкий рукав может создавать достаточное сопротивление смещающему элементу, что препятствует повторному формированию или восстановлению свернутой кольцевой складки. Создавая достаточную структуру для сохранения свернутой кольцевой складки 78, смещающий элемент позволяет осуществлять легкое движение в обоих направлениях между первым осевым положением «P» и вторым осевым положением «D» таким образом, что гибкий рукав может быстро реагировать в том случае, если давление текучей среды в баллоне отклоняется от первоначального уровня давления смещающего элемента.
В одном из объектов изобретения смещающий элемент, при необходимости, выполнен таким образом, чтобы изменение осевого положения гибкого рукава, которое создает дискретный визуальный сигнал, происходило при относительно небольшом изменении давления текучей среды в баллоне. Например, изменение давления, достаточное для того, чтобы вызвать изменение в аксиальном положении гибкого рукава, может находиться в пределах от 0,25 фунтов на квадратный дюйм до 0,75 фунтов на квадратный дюйм. В другом примере изменение давления, достаточное для того, чтобы вызвать изменение осевого положения гибкого рукава, может находиться в пределах от 0,4 фунта на квадратный дюйм до 0,6 фунта на квадратный дюйм. В еще одном примере изменение давления, достаточное для того, чтобы вызвать изменение осевого положения гибкого рукава, может составлять 0,5 фунтов на квадратный дюйм (приблизительно, 3.5 килопаскаль). Это изменение давления является изменением относительного давления и представляет изменение давления относительно окружающей среды или атмосферного давления.
Желательно, чтобы жесткость пружины смещающего элемента соответствовала линейной жесткости пружины и обозначалась терминами фунты-сила на линейный дюйм (фунт-сила/дюйм). Таким образом, жесткость пружины представляет собой груз, выраженный в фунтах-сила, необходимый для того, чтобы заставить пружину изменить направление (т.е. сжаться или растянуться) на расстояние, равное одному дюйму. Например, если жесткость пружины равняется сорока (40) фунт-сила/дюйм, потребуется десять (10) фунт-силы для того, чтобы изменить направление (т.е. сжать или растянуть) пружины на 0,25 дюйма, и потребуется восемьдесят (80) фунт-силы, для того, чтобы изменить направление (т.е. сжать или растянуть) пружины на два (2) дюйма. Один (1) фунт-сила на дюйм равен приблизительно 1,8 ньютон/см.
В соответствии с изобретением жесткость пружины может находиться в диапазоне от 0.1 фунт-сила/дюйм до 1,0 фунт-сила/дюйм (от около 0,4 ньютон/дюйм до около 4.5 ньютон/дюйм или от около 0.1 ньютон/ем до около 1,8 ньютон/ем). Предпочтительно жесткость пружины может составлять от около 0,13 фунт-сила/дюйм до около 0,60 фунт-сила/дюйм. Более предпочтительно, жесткость может составлять от около 0.2 фунт-сила/дюйм до около 0,45 фунт-сила/дюйм. И наиболее предпочтительно, жесткость пружины может составлять от около 0.25 фунт-сила/дюйм до около 0,35 фунт-сила/дюйм. Например, жесткость пружины может составлять около 0.3 фунт-сила/дюйм.
Говоря в общем, гибкий рукав 66 должен обладать достаточной мягкостью, для того чтобы он незначительно влиял на жесткость пружины. Например, гибкий рукав может иметь гибкий обычно кольцевой участок, на котором толщина стенок этого участка составляет от около 5 до около 30 мил (т.е. от около 5 до около 30 тысячных дюйма или от около 127 микрометров до около 760 микрометров). В другом примере толщина стенок может составлять от около 10 до около 20 мил (т.е. от около 250 микрометров до около 510 микрометров). И в еще одном примере толщина стенок может составлять от около 15 до около 20 мил (т.е. от около 380 микрометров до около 510 микрометров). Эта толщина может быть определена стандартными методами с использованием цифрового контактного устройства, такого как, например, Mitutoyo Litematic Digimatic Measuring Unit, согласно соответствующим стандартизированным тестам. В одном из объектов изобретения рассматривается вариант, когда толщина гибкого рукава может быть выбрана для того, чтобы значительно дополнять сопротивление смещающего элемента деформации, тем самым создавая комбинированное первоначальное давление деформации для комбинации из двух компонентов.
Важным отличительным свойством настоящего изобретения является то, что оно обеспечивает дискретный визуальный сигнал, извещающий о том, что давление текучей среды в накачиваемом баллоне отличается от заданного уровня давления. Говоря в общем, это достигается наличием смещающего элемента, выбранного для того, чтобы обеспечивать соответствующее движение (например, линейно по оси (осевому протяжению) корпуса) и быструю реакцию на изменение давления (например, низкую жесткость пружины) так, чтобы смещающий элемент быстро деформировался под воздействием очень маленького диапазона изменения давления, создавая дискретный отчетливый сигнал, извещающий о том, что давление текучей среды в баллоне отличается от первоначального давления смещающего элемента, и/или о том, что объем баллона отличается от заданного объема заполнения. Такой дискретный визуальный сигнал может определяться как «бинарный» сигнал. То есть давление либо выше (или равно) заданному уровню давления, что обеспечивает один результат, показываемый индикатором предварительного смещения, либо давление ниже заданного уровня давления, что обеспечивает другой результата, показываемый индикатором предварительного смещения. Альтернативно и/или дополнительно, объем баллона будет либо больше, чем или равен заданному объему заполнения, что обеспечивает один результат, показываемый индикатором предварительного смещения, либо объем баллона будет меньше, чем заданный объем заполнения, что обеспечивает другой результат, показываемый индикатором предварительного смещения. Этот ответ гораздо проще истолковать, чем относительное и непрерывное растяжение пилотных баллонов, сильфонов и/или других индикаторов, которые обеспечивают непрерывное считывание или показ различных уровней давления текучей среды в баллоне.
Такой простой и легкий в истолковании индикатор описан как «индикатор предварительного смещения», так как он выполнен таким образом, чтобы изменять свои индикаторные показания или сигнал в ответ на давление текучей среды, пересекающее заданный уровень давления. Эта конструкция запускается в работу при использовании накачиваемого баллона, имеющего заданный объем заполнения. Говоря в общем, заданный объем заполнения - это объем, находящийся в диапазоне с нижним пределом, соответствующим объему баллона при переходе от нерастянутого состояния к растянутому состоянию, где текучая среда в баллоне сначала находиться под давлением и с верхним пределом, не превышающим более чем в полтора раза (1,5 раза) (т.е. на 50 процентов больше) объем баллона при переходе от нерастянутого состояния к растянутому состоянию.
Эти баллоны заметно отличаются от традиционных эластичных баллонов, изготовленных из материалов, которые растягиваются от состояния покоя или нерастянутого состояния до постоянно растянутого или накачанного состояния под воздействием возрастающих значений давления в десять раз, даже в двенадцать раз или более от своего первоначального нерастянутого размера, чтобы достигнуть необходимого объема заполнения, составляющего от трех (3) до пяти (5) миллиметров и максимального объема заполнения, который обычно находится в диапазоне от восьми (8) до десяти (10) миллиметров. Во многих случаях такие эластичные баллоны могут быть заполнены сверх нормы, чтобы достичь гораздо больших объемов без значительного наращивания давления для обеспечения сопротивления сверхмерному заполнению вследствие упругого растяжения материала баллона. Поскольку возможно изготовить эластичный баллон, который имеет форму или объем, даже когда он находится в ненакачанном состоянии, такой эластичный баллон будет иметь малую пользу или не иметь практическую пользу для большинства медицинских устройств и особенно в качестве фиксирующего баллона для катетеров энтерального питания, вследствие того что такие баллоны имеют дополнительный объем и с трудом проходят через отверстие, такое как стома.
Как было отмечено ранее, примерное соотношение между давлением и объемом во время накачивания эластичного фиксирующего баллона, изготовленного из «мягкого» или эластичного силикона медицинского класса, показано на Фиг.1C. Как можно видеть, немедленное изменение давления от нуля или незначительного давления до уровня в диапазоне от 4 до 7 фунтов на квадратный дюйм (от 28 до 48 килопаскаль) необходимо для постоянного растяжения таких примерных традиционных фиксирующих баллонов до объема, равного даже 1 миллиметру. Давление в диапазоне от 5 до 10 фунтов на квадратный дюйм (от 34 до 69 килопаскаль) необходимо для постоянного растяжения таких традиционных «мягких» или эластомерных баллонов из силикона медицинского класса до объема, равного 3 миллиметрам. Поскольку возможно внести некоторые изменения в характеристики расширения или растяжения таких традиционных эластичных баллонов путем модифицирования свойств эластичных материалов или толщины стенок баллона, соотношение давления и объема, показанное на Фиг.1C, обычно характерно. Примечательно, что соотношение давления и объема может характеризоваться как нелинейное.
Другой важной характеристикой таких традиционных «мягких» или эластичных баллонов является то, что энергия, использованная для растяжения материала баллона в десять раз или даже в двадцать и более раз от его первоначальных нерастянутых размеров, аккумулируется или сохраняется растянутым эластичным материалом. Этот растянутый материал вызывает сжатие или восстановление силы, которая стремится преобразовать размеры баллона по большей части или полностью до его первоначальных размеров в нерастянутом состоянии. Соответственно, если имеет место утечка или повреждение баллона или другой части системы, позволяющее текучей среде улетучиваться, давление на текучую среду в баллоне, генерированное материалом баллона по мере того как он сжимается, приведет к очень быстрому опустошению баллона.
В данном изобретении применяется использование накачиваемого баллона, имеющего «заданный объем заполнения», как было описано выше. Такие баллоны растяжимы от первоначального сжатого или ненакачанного состояния до достижения ими заданного объема без какого-либо значительного растяжения или надувания материалов, из которых сформирован баллон в отличие от традиционных эластичных баллонов, которые требуют постоянного повышения давления для растяжения в десять раз, даже в двадцать и более раз от своего первоначального нерастянутого размера, а затем возврата в большей степени или полностью к своему первоначальному нерастянутому размеру, после того как окончено воздействие давления. Заданным объемом заполнения является объем баллона, находящийся в диапазоне с нижним пределом, равным объему баллона при переходе от ненакачанного состояния к накачанному состоянию, где текучая среда в баллоне сначала находится под давлением, и с верхним пределом, не превышающим более чем в 15, раза (т.е. на 50 процентов больше чем) объем баллона при переходе от его ненакачанного состояния к накачанному состоянию. Как видно на Фиг.1C, у эластичных баллонов отсутствует переход от ненакачанного состояния к накачанному состоянию. Если же такой переход все-таки имеет место, он произойдет только во время раннего введения давления для инициации растяжения или непрерывного расширения материала баллона и будет гораздо ниже конечного развернутого объема баллона.
Другими словами, накачиваемый баллон, имеющий заданный объем заполнения, представляет собой, по существу, непроницаемый, гибкий мешок или контейнер, имеющий относительно фиксированный размер (т.е. фиксированный объем). Когда баллон (т.е. мешок) пуст, он находится, по существу, в сжатом состоянии и имеет потенциал к тому, чтобы быть заполненным текучей средой до его фиксированного размера. Заполнение совершается путем введения текучей среды внутрь баллона через клапан накачивания блока энтерального питания. Поскольку баллон получает растущие объемы текучей среды, баллон трансформируется от сжатого состояния до развернутого состояния, что обычно соответствует индивидуальному расширенному профилю баллона, типично создаваемому во время изготовления баллона в процессе формовки, выдувания, отливки или подобных процессах. По существу, для заполнения баллона не требуется давления кроме как для введения жидкости через полость накачивания и развертывания баллона, так как материал, формирующий баллон, не растянут или не расширен для достижения его фиксированного или заданного размера. «Резервный объем» баллона находится при переходе между ненакачанным состоянием баллона и накачанным состоянием до того, как текучая среда в баллоне окажется под давлением. Давление текучей среды в баллоне возрастает, когда баллон заполнен сверх резервного объема. Давление текучей среды в баллоне возрастает в основном в линейном отношении с дополнительными возрастаниями в объеме баллона.
Различные материалы могут быть использованы для формирования накачиваемого баллона, имеющего заданный объем заполнения. Эти материалы включают в себя полиуретан (PU), полиэтилен с низкой плотностью (LDPE), поливинилхлорид (PVC), полиамид (PA) или полиэтилентерафталат (PETP), но не ограничиваются ими. Дополнительно, могут быть использованы сополимерные примеси для модификации характеристик материала, например, полиэтилен с низкой плотностью и сополимер этиленвинилацетата (LDPE-EVA) или смеси вышеупомянутых материалов (например, PU с PVC или PU с PA) могут рассматриваться как подходящие для формирования накачиваемого баллона, имеющего заданный объем заполнения. Могут применяться и другие материалы при условии, что они обладают свойствами, позволяющими им быть использованными для изготовления накачиваемого фиксирующего баллона, имеющего тонкие стенки порядка от 5 до 100 микрометров при измерении в центральной области баллона. Эта толщина может быть определена при помощи традиционной технологии, использующей цифровое контактное устройство, такое как, например, Mitutoyo Litematic Digimatic Measuring Unit, в соответствии со стандартизованными тестами. Желательно, чтобы баллоны могли иметь тонкие стенки и, желательно, чтобы их толщина находилась в диапазоне между 5 и 50 микрометрами, более желательно, в диапазоне между 5 и 25 микрометрами. Приемлемые материалы должны обладать свойствами, позволяющими изготавливать из них накачиваемый фиксирующий баллон, имеющий микротонкие стенки, которые не могут упруго деформироваться до такой степени, что они способны проскользнуть через отверстие. Напротив, традиционные силиконовые баллоны имеют толщину стенок, равную около 250 микрометров или даже более.
Фиг.7A и 7B - чертежи, показывающие примерные соотношения между объемом баллона и давлением жидкости внутри баллона, имеющего заданный объем заполнения. Эти рисунки показывают переход между ненакачанным состоянием и накачанным состоянием такого баллона.
На Фиг.7A показано соотношение между давлением и объемом для пяти образцов баллонов, имеющих заданный объем заполнения, составляющий приблизительно два (2) миллиметра. Как видно на Фиг.7A, профили давления, по существу, незначительные во время заполнения баллонов до заданных объемов заполнения. Небольшое давление возникает благодаря движущей силе, необходимой для перемещения жидкости через полость накачивания и расправления сжатого баллона. При переходе от ненакачанного состояния к накачанному состоянию, что происходит при достижении объема, немного превышающего 1,5 миллиметра (т.е. от 1,6 до 1,7 миллиметра), давление начинает повышаться линейно.
На Фиг.7B показано соотношение между давлением и объемом для семи образцов баллонов, имеющих заданный объем заполнения, составляющий приблизительно 5 миллиметров. Как видно на Фиг.7 В, профили давления являются, по существу, незначительными во время заполнения баллонов до их заданных объемов заполнения. Небольшое давление возникает благодаря движущей силе, необходимой для перемещения жидкости через полость накачивания и для расправления сжатого баллона. При переходе от ненакачанного состояния к накачанному состоянию, что происходит при достижении объема, немного превышающего 3,5 миллиметра (т.е. от 3,6 до 3.7 миллиметра), давление начинает повышаться линейно.
Вследствие соотношения между давлением и объемом, которое существует для баллонов, имеющих заданные объемы заполнения, как в общих чертах представлено на Фиг.7A и 7B, деформирующее давление индикатора предварительного смещения может быть установлено гораздо ниже, чем было бы возможно для традиционных эластичных баллонов, которые должны непрерывно растягиваться под воздействием растущего давления. Индикатор предварительного смещения реагирует на изменение давления, которое начинается при переходе от ненакачанного состояния к накачанному состоянию.
Заданный уровень давления, который соответствует заданному объему заполнения баллона, может быть установлен при переходе от ненакачанного состояния к накачанному состоянию или может быть установлен на давление, соответствующее объему, который не больше чем на пятьдесят процентов (50%) больше. Во время заполнения баллона индикатор предварительного смещения создает дискретный визуальный сигнал, извещающий о том, что заданный объем заполнения достигнут. После того как баллон был заполнен, индикатор предварительного смещения создает дискретный визуальный сигнал, извещающий о том, что баллон потерял давление или объем и, возможно, имеется утечка. Преимуществом применения таких баллонов, имеющих заданный объем заполнения, как это было описано выше, является то, что при наличии утечки или повреждения баллона или другой части системы, позволяющих текучей среде выходить наружу, тот факт, что баллон не растянут или не накачан до своего заданного объема заполнения означает, что будет очень малое давление или отсутствие давления, или движущей силы из баллона, вызывающее утечку дополнительной жидкости - в отличие от традиционных эластичных баллонов, которые сохраняют энергию своего растянутого состояния для сжатия до своего первоначального нерастянутого состояния.
Один из объектов данного изобретения касается индикаторного блока для использования в медицинских изделиях, особенно в медицинских изделиях, имеющих головку, расположенную снаружи человеческого тела и накачиваемый фиксирующий баллон, который развертывается внутри полости в теле человека. Индикаторный блок включает в себя накачиваемый тонкостенный баллон, имеющий заданный объем заполнения. В одном из объектов изобретения тонкостенный баллон, выполненный из материала, такого как, например, полиуретан, не обладает упругостью достаточной для того, чтобы баллон служил в качестве якоря, когда он не содержит в себе текучую среду, такую как жидкость или, в некоторых ситуациях, газ. Говоря в общем, это может относиться к баллонам, имеющим тонкие стенки, толщина которых составляет около 100 микрометров или менее. Предпочтительно баллоны имеют толщину стенки около 50 микрометров или менее. Более предпочтительно баллоны имеют толщину стенки в диапазоне от 5 до 50 микрометров, а еще более желательно - в диапазоне от 5 до 25 микрометров, и даже еще более желательно - в диапазоне от 5 до 15 микрометров.
Баллон выполнен таким образом, чтобы содержать текучую среду под давлением во время накачивания до его заданного объема заполнения и после накачивания, дополнительно выполнен таким образом, чтобы содержать резервный объем текучей среды, когда текучая среда больше не находится под давлением. Резервный объем меньше, чем заданный объем заполнения, и отображает объем жидкости, которая удерживается в баллоне при переходе от его ненакачанного состояния к его накачанному состоянию. Это соотношение или характеристика показана на Фиг.7A и 7B, как обсуждалось выше, желательно, чтобы давление текучей среды во время накачивания до заданного объема заполнения было относительно низким давлением, например, равным 4 фунтам на квадратный дюйм (28 килопаскаль) или менее. Например, давление текучей среды во время накачивания до заданного объема заполнения может находиться в диапазоне от около 1 до около 3,5 фунтов на квадратный дюйм (psi) (приблизительно от 7 до около 25 килопаскаль). В качестве другого примера давление текучей среды во время накачивания до заданного объема заполнения может находиться в диапазоне от около 2 до около 3 фунтов на квадратный дюйм (psi) (приблизительно от 14 до около 21 килопаскаль).
Индикаторный блок также включает в себя индикатор, который обеспечивает только первый дискретный визуальный сигнал, когда баллон накачан до своего заданного объема заполнения, и второй дискретный визуальный сигнал, когда текучая среда в баллоне больше не находится под давлением, не обеспечивая никаких сигналов, извещающих о других промежуточных состояниях накачивания. То есть индикатор обеспечивает сигнал, извещающий только о двух состояниях баллона - что он имеет заданный объем заполнения и что текучая среда внутри баллона больше не находится под давлением. Обычная конструкция примерного индикатора описана выше и показана, например, на Фиг.2-4, 5A, 5B, 6A и 6B.
В соответствии с изобретением второй дискретный визуальный сигнал обеспечивает предупреждение о том, что объем баллона достиг резервного объема. Вследствие того что баллон выполнен таким образом, чтобы сохранять объем текучей среды даже когда баллон не находится под давлением (в противном случае возникает катастрофическое повреждение стенки баллона или соединения между баллоном и устройством), у пользователя будет какое-то время на то, чтобы повторно накачать баллон или заменить устройство, не беспокоясь о том, что баллон тут же перестанет закреплять устройство,
Говоря в общем, заданный объем заполнения, желательно, превышает резервный объем в от около 1,01 до около 1.5 раза (т.е от около 1 процента до около 50 процентов больше, чем объем баллона при переходе от его ненакачанного состояния к его накачанному состоянию). Например, заданный объем заполнения может превышать резервный объем в от около 1,05 до около 1, 4 раза (т.е. от около 5 процентов до около 40 процентов больше, чем объем баллона при переходе от его ненакачанного состояния до его накачанного состояния). В качестве другого примера заданный объем заполнения может превышать резервный объем в от около 1,1 до около 1,3 раза (т.е. от около 10 процентов до около 30 процентов больше, чем объем баллона при переходе от его ненакачанного состояния к его накачанному состоянию).
Поскольку настоящее изобретение было описано в связи с некоторыми предпочтительными вариантами, следует понимать, что предмет изобретения не ограничивается этими отдельными вариантами. Напротив, предполагается, что предмет изобретения включает все варианты, модификации и эквиваленты, которые могут быть включены в суть и объем формулы изобретения.


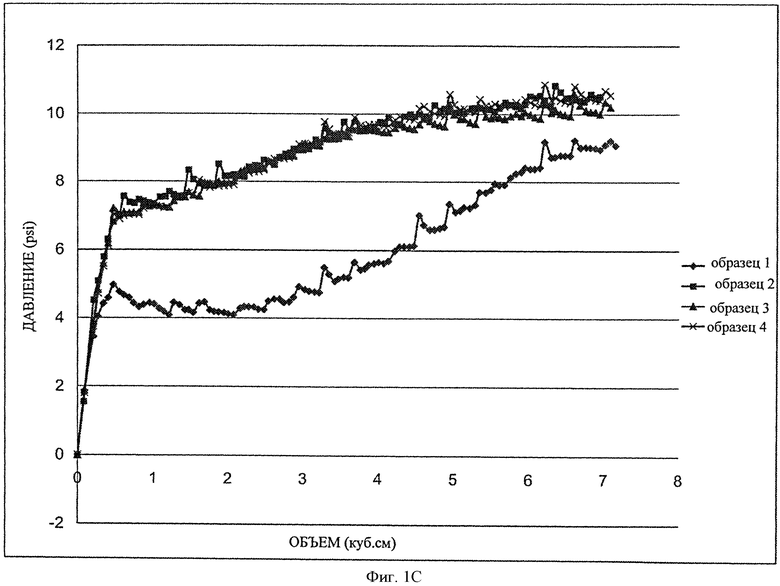

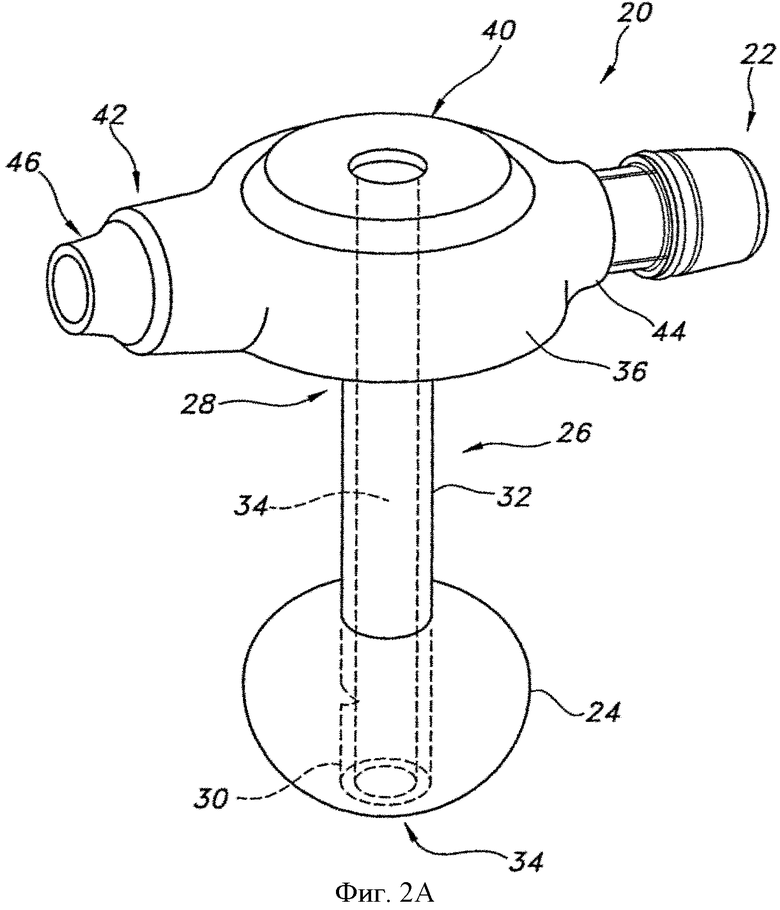
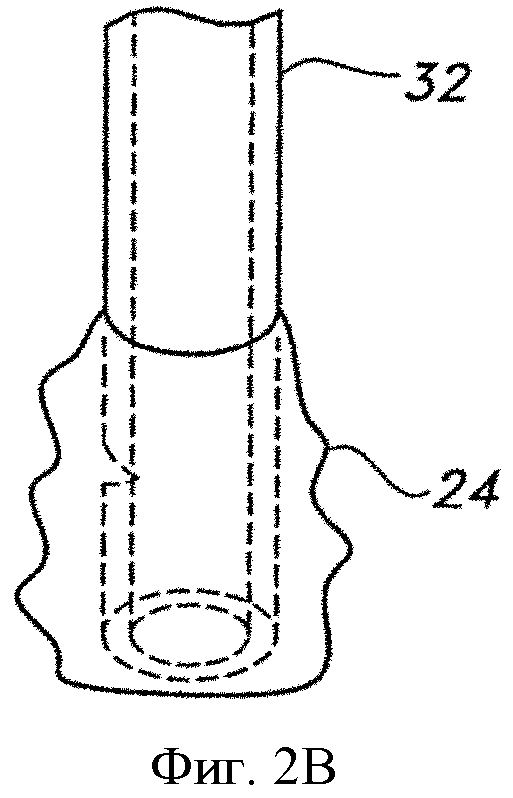
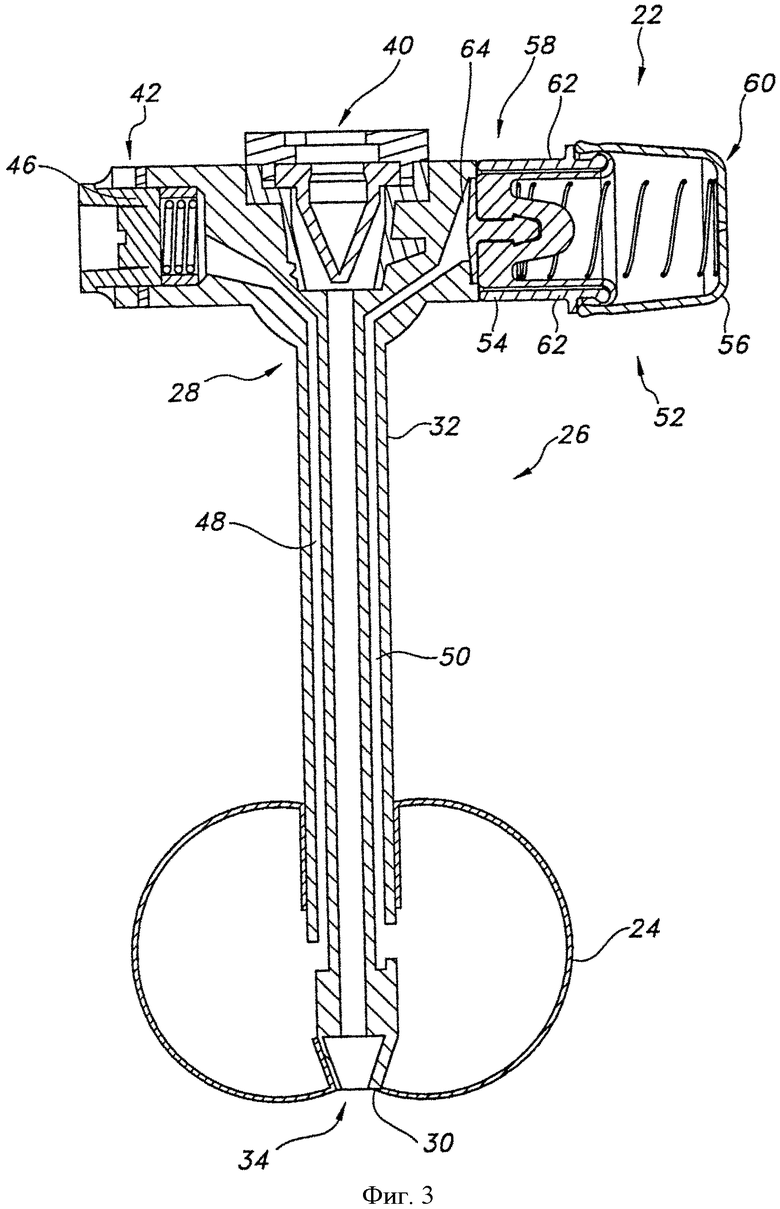
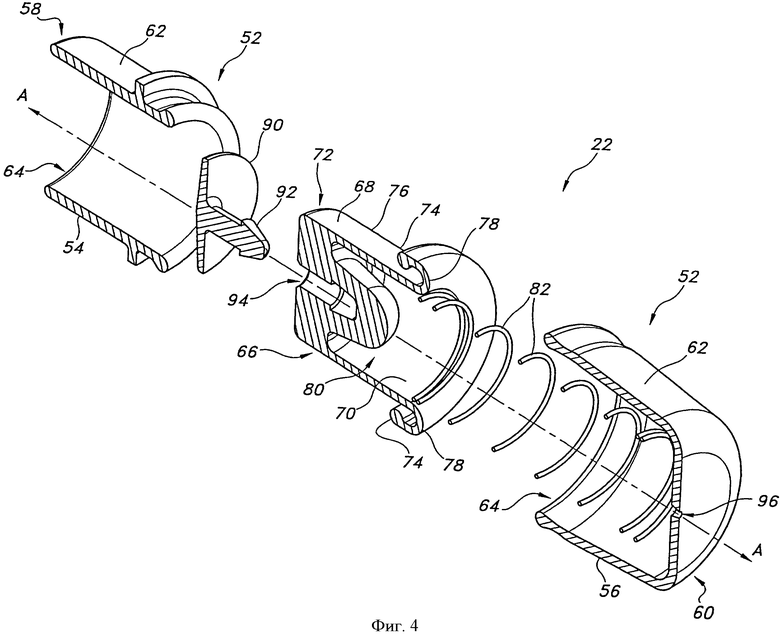



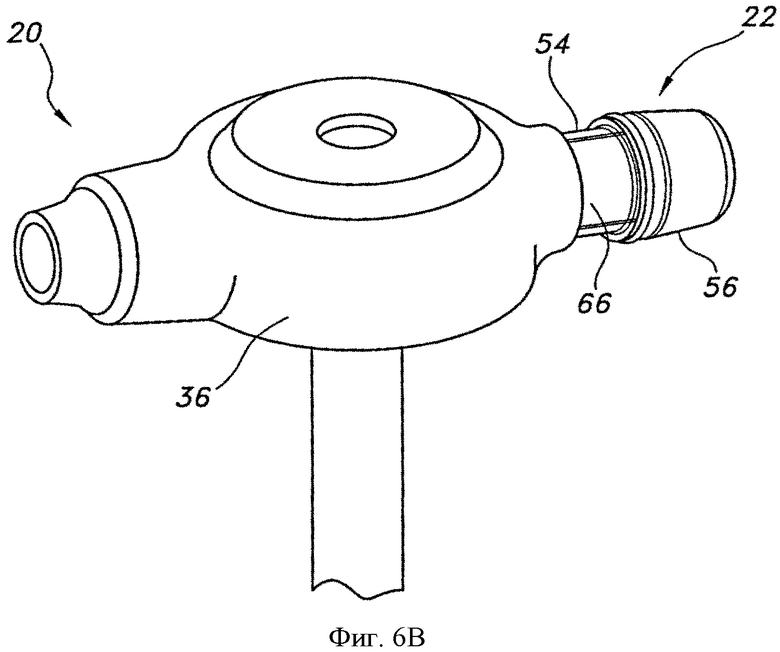


Группа изобретений относится к усовершенствованным приспособлениям для энтерального питания. Представлен блок катетера энтерального питания, содержащий: катетер, имеющий проксимальный конец, дистальный конец и стенки катетера, образующие полость катетера; основание, расположенное у проксимального конца катетера, причем основание образует отверстие в полость катетера, при этом основание имеет первый конец и второй конец; накачиваемый баллон, имеющий заданный объем заполнения, причем баллон расположен на дистальном конце катетера; клапан накачивания, расположенный на основании, причем клапан накачивания находится в жидкостном сообщении с баллоном посредством полости накачивания, образованной стенками катетера; и индикатор предварительного смещения, расположенный на основании, находящийся в жидкостном сообщении с баллоном, причем индикатор предварительного смещения выполнен так, чтобы обеспечивать дискретный визуальный сигнал о том, что давление текучей среды в баллоне отличается от заданного уровня давления или объем баллона отличается от заданного объема заполнения. Также описаны устройство баллонного катетера энтерального питания и индикаторный блок для регистрации дискретных визуальных сигналов при применении в медицинских изделиях. Достигается повышение надежности и оперативности при осуществлении энтерального питания. 3 н. и 14 з.п. ф-лы, 14 ил.
1. Блок катетера энтерального питания, содержащий:
катетер, имеющий проксимальный конец, дистальный конец и стенки катетера, образующие полость катетера;
основание, расположенное у проксимального конца катетера, причем основание образует отверстие в полость катетера, при этом основание имеет первый конец и второй конец;
накачиваемый баллон, имеющий заданный объем заполнения, причем баллон расположен на дистальном конце катетера;
клапан накачивания, расположенный на основании, причем клапан накачивания находится в жидкостном сообщении с баллоном посредством полости накачивания, образованной стенками катетера; и
индикатор предварительного смещения, расположенный на основании, находящийся в жидкостном сообщении с баллоном, причем индикатор предварительного смещения выполнен так, чтобы обеспечивать дискретный визуальный сигнал о том, что давление текучей среды в баллоне отличается от заданного уровня давления или объем баллона отличается от заданного объема заполнения;
причем индикатор предварительного смещения содержит:
корпус, имеющий первый конец, второй конец и одну или более стенок, образующих внутренний канал, причем первый конец корпуса находится в жидкостном сообщении с накачиваемым баллоном, а по меньшей мере участок корпуса выполнен прозрачным или полупрозрачным;
гибкий рукав, распложенный во внутреннем канале корпуса, причем гибкий канал содержит: первую поверхность, противоположную ей вторую поверхность, первый конец, размещенный во внутреннем канале корпуса вблизи первого конца корпуса и находящийся в жидкостном сообщении с накачиваемым баллоном, второй конец, герметично соединенный с корпусом, и гибкий кольцевой участок, соединяющий первый конец и второй конец рукава, причем кольцевой участок ограничивает свернутую кольцевую складку, располагающуюся между первым концом и вторым концом таким образом, что, по меньшей мере, один участок первой поверхности гибкого рукава находится вблизи одной или нескольких стенок корпуса и, по меньшей мере, один участок второй поверхности гибкого рукава ограничивает полость рукава, и
смещающий элемент, расположенный, по меньшей мере, частично внутри полости рукава и между первым концом корпуса и вторым концом корпуса, причем смещающий элемент выполнен так, чтобы деформироваться при заданном давлении так, чтобы первый конец гибкого рукава передвигался от первого осевого положения к по меньшей мере второму осевому положению для обеспечения дискретного визуального сигнала о том, что давление текучей среды в баллоне отличается от заданного уровня давления или объем баллона отличается от заданного объема заполнения;
причем гибкий рукав выполнен так, что движение гибкого рукава в осевом направлении является причиной того, что участок второй поверхности гибкого рукава выворачивается у свернутой кольцевой складки таким образом, что становится непосредственно приближенным к одной или нескольким стенкам корпуса.
2. Блок катетера энтерального питания по п. 1, в котором клапан накачивания расположен на первом конце основания, а индикатор расположен на втором конце основания.
3. Блок катетера энтерального питания по п. 1, в котором катетер образует полость накачивания, а баллон находится в жидкостном сообщении с клапаном накачивания и индикатором посредством полости накачивания.
4. Блок катетера энтерального питания по п. 1, в котором катетер образует полость индикатора, а баллон находится в жидкостном сообщении с индикатором через полость индикатора.
5. Блок катетера энтерального питания по п. 1, в котором индикатор предварительного смещения выполнен так, чтобы обеспечивать дискретный визуальный сигнал о том, что давление текучей среды в баллоне ниже заданного уровня давления или объем баллона меньше, чем заданный объем заполнения.
6. Блок катетера энтерального питания по п. 1, в котором индикатор предварительного смещения выполнен так, чтобы обеспечивать дискретный визуальный сигнал о том, что давление текучей среды в баллоне превышает заданный уровень давления или объем баллона превышает заданный объем заполнения.
7. Устройство баллонного катетера энтерального питания, где баллонный катетер содержит:
катетер, имеющий проксимальный конец, дистальный конец и стенки катетера, образующие полость катетера;
основание, расположенное у проксимального конца катетера, образующее отверстие в полость катетера;
накачиваемый баллон, имеющий заданный объем заполнения, баллон расположен у дистального конца катетера и выполнен так, чтобы содержать текучую среду под давлением;
клапан накачивания, расположенный на основании, причем клапан накачивания находится в жидкостном сообщении с баллоном; и
индикатор предварительного смещения давления, находящийся в жидкостном сообщении с баллоном, причем индикатор предварительного смещения давления выполнен так, чтобы обеспечивать дискретный визуальный сигнал о том, что давление текучей среды в баллоне отличается от заданного уровня давления или объем баллона отличается от заданного объема заполнения;
причем индикатор предварительного смещения содержит корпус, гибкий рукав, прикрепленный к корпусу, и смещающий элемент, соединенный с гибким рукавом, причем смещающий элемент выполнен так, чтобы деформироваться при заданном давлении так, чтобы гибкий рукав передвигался по оси корпуса от первого осевого положения ко второму осевому положению.
8. Устройство по п. 7, в котором индикатор предварительного смещения расположен на основании у проксимального конца катетера.
9. Устройство по п. 7, в котором гибкий рукав выполнен так, что в первом положении гибкий рукав обеспечивает дискретный визуальный сигнал о том, что давление текучей среды в баллоне ниже, чем заданный уровень давления, или объем баллона меньше заданного объема заполнения.
10. Устройство по п. 7, в котором гибкий рукав выполнен так, что второе положение гибкого рукава обеспечивает дискретный визуальный сигнал о том, что давление текучей среды в баллоне превышает заданный уровень давления или что объем баллона превышает заданный объем заполнения.
11. Устройство по п. 7, в котором гибкий рукав является видимым через по меньшей мере один участок корпуса тогда, когда гибкий рукав находится в своем первом положении.
12. Устройство по п. 7, в котором катетер образует полость накачивания, а баллон находится в жидкостном сообщении с клапаном накачивания и индикатором через полость накачивания.
13. Устройство по п. 7, в котором катетер образует полость индикатора, а баллон находится в жидкостном сообщении с индикатором через полость индикатора.
14. Индикаторный блок для регистрации дискретных визуальных сигналов при применении в медицинских изделиях, имеющий головку, расположенную снаружи человеческого тела, и накачиваемый удерживающий баллон, который разворачивается внутри полости в теле человека, причем индикаторный блок содержит:
накачиваемый тонкостенный баллон, имеющий заданный объем заполнения, причем баллон выполнен так, чтобы содержать текучую среду под давлением до накачивания до заданного объема заполнения, а после накачивания дополнительно конфигурирован так, чтобы содержать резервный объем текучей среды, который меньше заданного объема заполнения, когда текучая среда больше не находится под давлением; и
индикатор, выполненный с возможностью обеспечения только первого дискретного визуального сигнала, когда баллон накачан до заданного объема заполнения, и второго дискретного визуального сигнала, когда текучая среда в баллоне больше не находится под давлением, при этом сигнал о других состояниях накачивания отсутствует;
при этом второй дискретный визуальный сигнал предназначен для обеспечения предупреждения о том, что объем баллона достиг резервного объема;
причем индикатор, который представляет собой индикатор предварительного смещения, содержит:
корпус, имеющий первый конец, второй конец и одну или более стенок, образующих внутренний канал, причем первый конец корпуса находится в жидкостном сообщении с накачиваемым баллоном, а по меньшей мере участок корпуса выполнен прозрачным или полупрозрачным;
гибкий рукав, распложенный во внутреннем канале корпуса, причем гибкий канал содержит: первую поверхность, противоположную ей вторую поверхность, первый конец, размещенный во внутреннем канале корпуса вблизи первого конца корпуса и находящийся в жидкостном сообщении с накачиваемым баллоном, второй конец, герметично соединенный с корпусом, и гибкий кольцевой участок, соединяющий первый конец и второй конец рукава, причем кольцевой участок ограничивает свернутую кольцевую складку, располагающуюся между первым концом и вторым концом, таким образом, что, по меньшей мере, один участок первой поверхности гибкого рукава находится вблизи одной или нескольких стенок корпуса и, по меньшей мере, один участок второй поверхности гибкого рукава ограничивает полость рукава, и
смещающий элемент, расположенный, по меньшей мере, частично внутри полости рукава и между первым концом корпуса и вторым концом корпуса, причем смещающий элемент выполнен так, чтобы деформироваться при заданном давлении так, чтобы первый конец гибкого рукава передвигался от первого осевого положения к по меньшей мере второму осевому положению для обеспечения дискретного визуального сигнала о том, что давление текучей среды в баллоне отличается от заданного уровня давления или объем баллона отличается от заданного объема заполнения;
причем гибкий рукав выполнен так, что движение гибкого рукава в осевом направлении является причиной того, что участок второй поверхности гибкого рукава выворачивается у свернутой кольцевой складки таким образом, что становится непосредственно приближенным к одной или нескольким стенкам корпуса.
15. Индикаторный блок по п. 14, в котором заданный объем заполнения в от около 1,01 до около 1,5 раз больше резервного объема.
16. Индикаторный блок по п. 14, в котором заданный объем заполнения в от около 1,05 до около 1,4 раза больше резервного объема.
17. Индикаторный блок по п. 14, в котором заданный объем заполнения в от около 1,1 до около 1,3 раза больше резервного объема.

