Изобретение относится к машиностроению, в частности, к области кузовных транспортных средств, предназначенных для перевозки большого количества пассажиров и обладающих сигнальными устройствами, включаемыми вручную или под воздействием элементов управления, с двигателями, расположенными в зоне ведущих колес.
Хорошо известны экологические преимущества городского общественного электротранспорта по сравнению с образцами, имеющими двигатели внутреннего сгорания (ДВС) [1], но при этом электробусам обычно нужна развитая сеть пунктов для подзарядки аккумуляторов. В результате, благодаря своей мобильности и повышенной маневренности, микроавтобусы с ДВС практически вытеснили традиционные троллейбусы и трамваи из исторических центров старинных городов, для которых часто характерны усугубляющие загазованность от автомобилей узкие кривые улочки.
Известны конструкции большегрузных многоопорных транспортных средств с индивидуальным подводом мощности к колесам опор и возможностью их поворота по одному из запрограммированных вариантов, что гарантирует машинам высокие маневренные качества [2]. Кроме того, применение асинхронных электродвигателей с короткозамкнутым ротором (приспособленных к транспортным средствам и управляемых центральным компьютером с помощью инверторов) обеспечивает хорошую компактность и увеличенную надежность индивидуального привода колес по сравнению с аналогичными агрегатами на базе электродвигателей постоянного тока (при их равной мощности и скоростном диапазоне), что позволяет не применять для машины силовой привод колес в виде ведущего моста. Таким образом, большегрузные многоопорные транспортные средства могли бы служить аналогом предлагаемого изобретения, но они принципиально не приспособлены для перевозки пассажиров как в силу конструктивных особенностей, так и из-за невозможности оперативной адаптации систем управления к быстро изменяющейся дорожной обстановке центра городов.
Наиболее близким устройством по технической сущности и достигаемому эффекту к заявленному изобретению является принятый в качестве прототипа двухосный троллейбус со всеми ведущими и управляемыми колесами. Он содержит корпус в виде пассажирского салона с низким уровнем пола, входными и выходными дверями и с сиденьями вдоль стен, а также системы звуковой и световой сигнализации. От внешних источников энергоснабжения или от собственных аккумуляторов питаются приводы передних и задних колес, выполненные ведущими и управляемыми. Троллейбус имеет систему поворота, включающую в себя датчики углового положения колес и обеспечивающую возможность получения заданной от бортового компьютера траектории движения, а также рабочее место водителя, снабженное управляющими устройствами и приборной панелью [3].
Недостатком конструкции, принятой за прототип, является то, что перемещение троллейбуса по траектории, заранее непредсказуемой для других участников дорожного движения, не подкреплено дополнительными конструктивными мерами в области безопасности.
Другим недостатком является то, что в условиях переполненных машинами узких улиц затруднена безопасная посадка и высадка пассажиров общественного транспорта.
Технической задачей, решаемой изобретением, является повышение мобильности и маневренности городской машины, а также безопасности пассажиров и прочих участников дорожного движения как в нормальном режиме работы, так и в сложной обстановке во время особых режимов перемещения машины.
Решение поставленной технической задачи достигается тем, что городская машина, содержащая корпус в виде пассажирского салона, с входными и выходными дверями и с сиденьями вдоль стен, приводы передних и задних колес, выполненных ведущими и имеющих единую систему управления поворотом, включающую датчики углового положения колес в плоскости, параллельной поверхности движения, подключенные к бортовому компьютеру и обеспечивающие возможность обратной связи, необходимой для получения заданной траектории, а также рабочее место водителя, снабженное управляющими устройствами и приборной панелью, и системы звуковой и световой сигнализации, согласно изобретению машина дополнительно снабжена дисплеем бортового компьютера, видеокамерами наружного наблюдения, элементами системы навигации, радарами для определения расстояний до объектов окружающей обстановки, а также наружным защитным ограждением, при этом дисплей установлен на приборной панели, а видеокамеры - над всеми дверями, а также со стороны заднего торца корпуса, и с возможностью передачи на дисплей полученного изображения, совмещенного с планом окружающей обстановки, полученного с помощью радаров и системы навигации и дополненного изображением прогнозируемого бортовым компьютером коридора движения в зависимости от заданного водителем центра поворота или вида движения, причем приемопередающие элементы радаров размещены на каждом из колес совместно с датчиками их углового положения, а системы звуковой и световой сигнализации дополнены звуковым зуммером и светодиодными указателями направления движения машины, соответственно, работающими совместно в пульсирующем режиме во время маневров, связанных с опасностью для участников дорожного движения, причем светодиодные указатели установлены по углам торцевых и боковых стен корпуса, при этом наружное защитное ограждение выполнено в виде закрепленного по периметру нижней части корпуса упругоэластичного бампера, а приводы колес снабжены индивидуальными электродвигателями, размещенными внутри каждой из ступиц, а также силовыми устройствами для поворота в горизонтальной плоскости каждого из них на любой независимый от других колес угол, рассчитанный системой управления для выбранной водителем траектории.
Решение поставленной технической задачи достигается также тем, что входные и выходные двери для пассажиров выполнены как в левой, так и в правой боковых стенах корпуса при обеспечении средней вместимости салона городской машины.
Решение поставленной технической задачи достигается также тем, что по торцам корпуса установлен световой двусторонний знак, указывающий на выбранное системой управления направление движения данной части машины, а по краям его боковых стен - знаки прочих опасностей.
Решение поставленной технической задачи достигается также тем, что дисплей бортового компьютера выполнен интерактивным и сенсорным с возможностью оперативного управления водителем параметрами движения во время маневров, связанных с опасностью для участников дорожного движения.
Решение поставленной технической задачи достигается также тем, что для лиц с ограниченной подвижностью на заднем торце корпуса выполнены дополнительные двери, оснащенные переговорным устройством и кнопками вызова водителя, а также складная платформа.
Решение поставленной технической задачи достигается также тем, что машина снабжена аккумуляторами повышенной емкости для работы в режиме электробуса.
Поставленная техническая задача решается благодаря использованию в городской машине для каждого из колес в дополнение к единой системе управления поворотом, оборудованной датчиками обратной связи их углового положения в плоскости движения, предусмотрен индивидуальный привод, включающий в себя регулируемый электродвигатель. Это позволяет в стесненных городских условиях достичь большей степени управляемости машины при маневрировании по заданной траектории движения. Благодаря тому, что городская машина оснащена элементами системы навигации, видеокамерами наружного наблюдения, а также радарами для определения расстояний до появляющихся перед ней препятствий, имеется возможность получать на дисплее совмещенное изображение. Оно состоит из полиэкранного изображения от установленных на корпусе видеокамер и наложенного поверх полупрозрачного отображения окружающей городскую машину ситуации, например, в зоне остановки общественного транспорта, в том числе с прогнозируемой бортовым компьютером безопасного дальнейшего коридора с учетом заданных водителем вида движения или координатами центра поворота. Прикасаясь к интерактивному экрану дисплея с целью задания команд системе управления машиной, водитель может оперативно реагировать на быстроизменяющуюся дорожную ситуацию. Кроме того, невысокая скорость особых видов движения и расположенный по периметру нижней части корпуса бампер из упругоэластичного материала служат дополнительной защитой от последствий соударения с непредвиденными препятствиями. Еще одной из мер, повышающих безопасность других участников движения и пешеходов, является установка на городской машине работающих синхронно в пульсирующем режиме звукового зуммера и светодиодных указателей направления движения. В результате предлагаемых конструктивных дополнений значительно повышается безопасность дорожного движения.
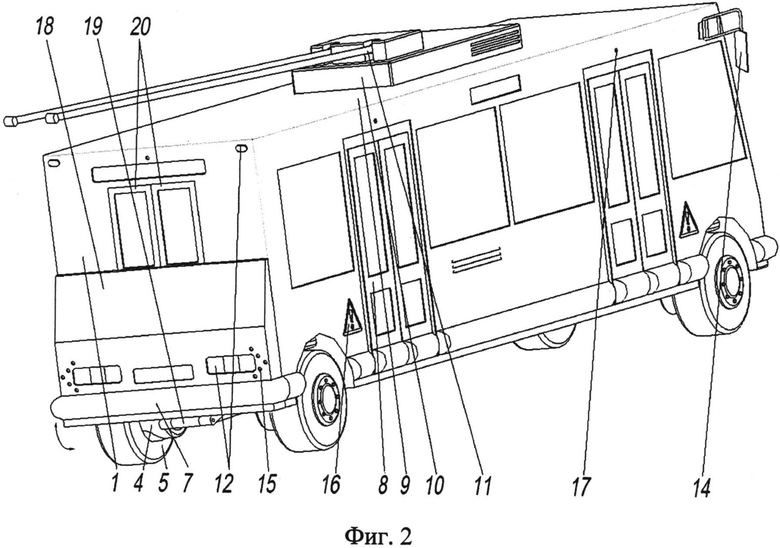
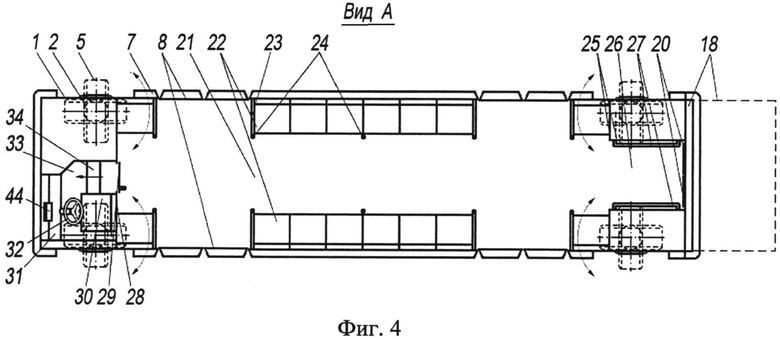
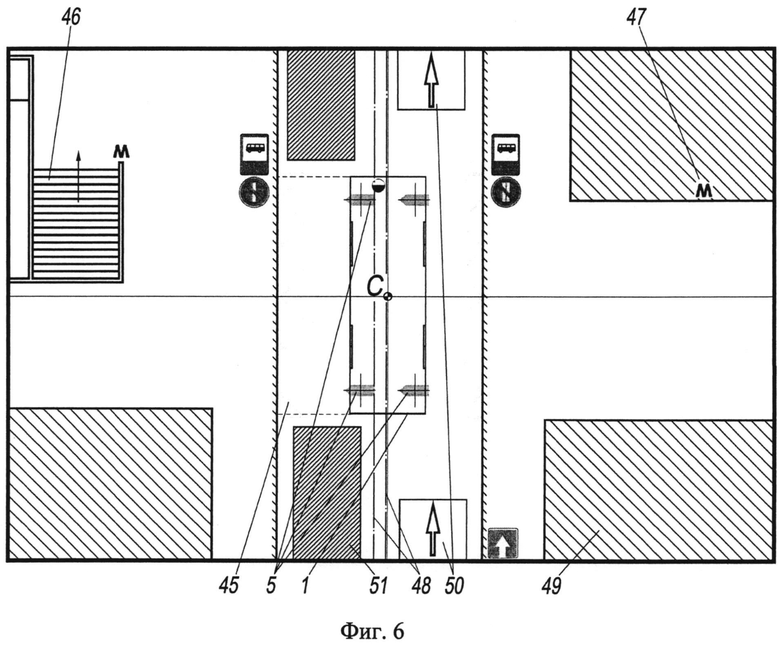
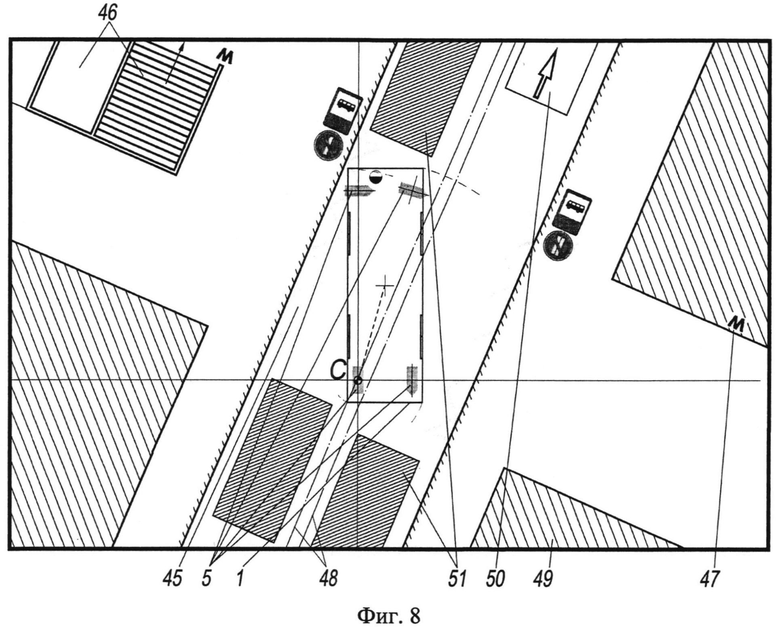
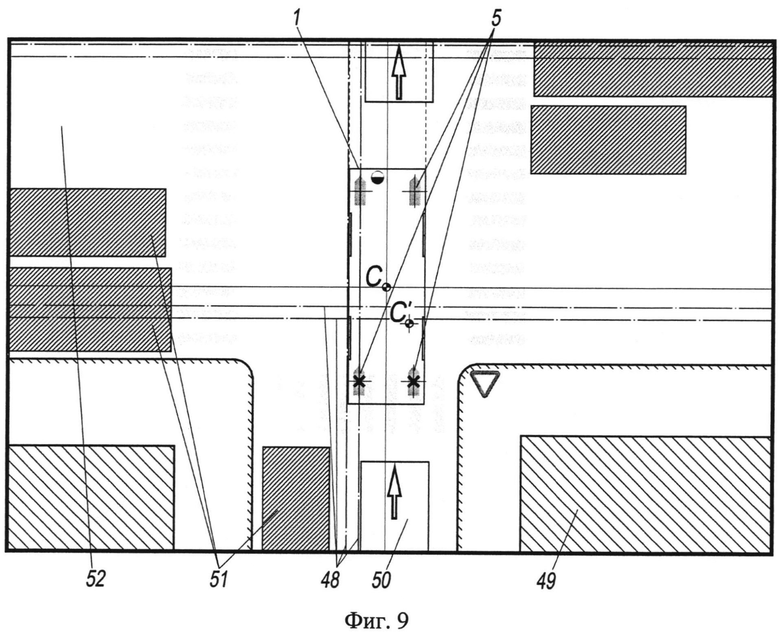
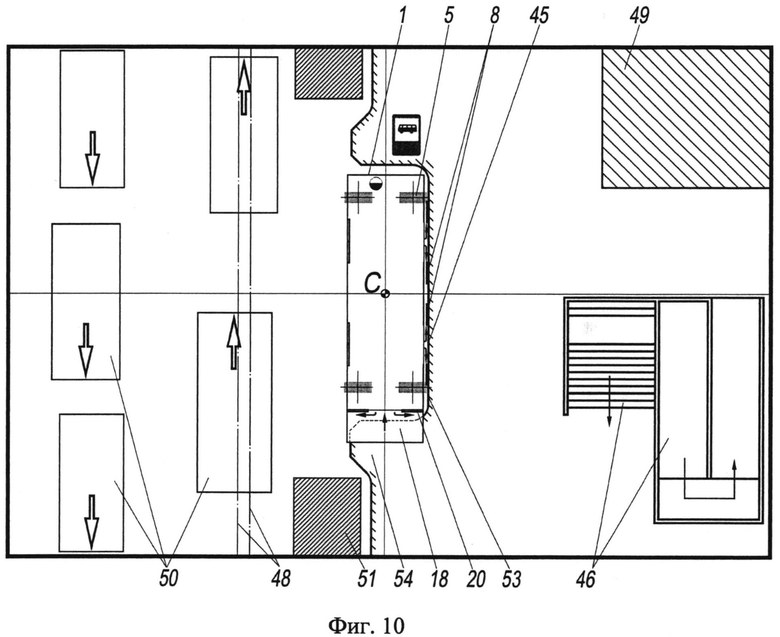
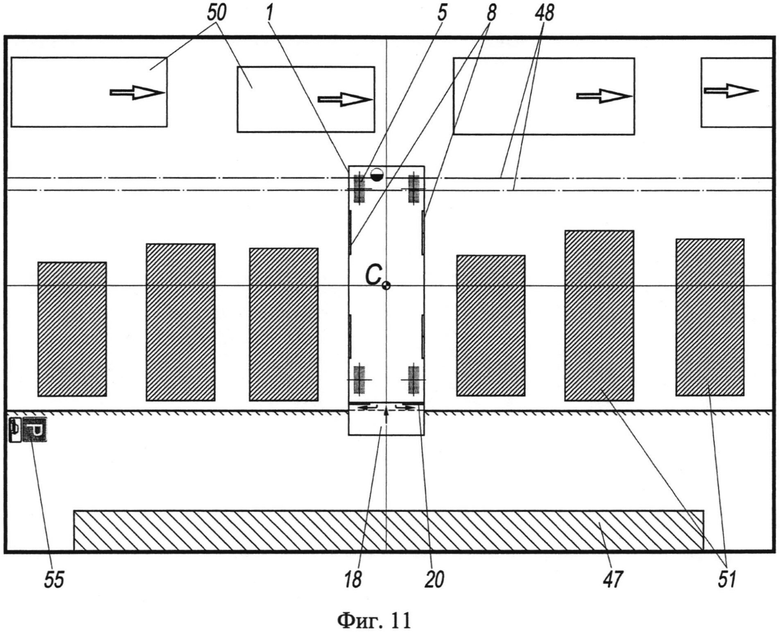
Изобретение поясняется чертежами, где на фиг.1, 2 и 3 изображена городская машина в аксонометрической проекции; на фиг.4 - схематично представлен вид А на фиг.1; на фиг.5 - дана схема рабочего места водителя; на фиг.6 - показан образец изображения на экране дисплея водителя в начальный момент подъезда городской машины к остановке; на фиг.7 - дано изображение на экране дисплея, показывающее начальный момент отъезда машины от остановки; на фиг.8 - дан пример изображения на экране дисплея, показывающее отъезд той же машины от остановки в момент смены полюса поворота; на фиг.9 - показан образец изображения на дисплее при проезде городской машиной перекрестка; на фиг.10 - показан образец изображения на экране дисплея в условиях оборудованной заездным карманом остановки; на фиг.11 - приведено изображение на дисплее варианта остановки городской машины на автостоянке. На рис.6…11 полиэкранные видеоизображения от камер наружного наблюдения городской машины, видимые через полупрозрачные контуры окружающей обстановки, характерной для особых режимов работы, условно не показаны. На чертежах (см. фиг.1…11) стрелками показаны направления перемещений объектов или подъема у лестниц; пунктирами показаны невидимые объекты (см. фиг.4), а также траектории возможного перемещения крайних точек городской машины и расстояние от ее геометрического центра до точки С центра поворота (см. фиг.6…8); центр поворота дополнительно обозначен тонкими взаимно перпендикулярными прямыми линиями; штриховкой (см. фиг.6…11) обозначены неподвижные объекты; штрихпунктирными линиями (см. фиг.6…11) обозначены провода контактной сети. Горизонтальная проекция неподвижного колеса условно изображается прямоугольником, а перемещающегося - стилизованной стрелкой, острый угол которой направлен в сторону движения (см. фиг.6…11). Показанные на фиг.9 проекции задних колес, которые на высокой скорости принудительно блокируются от поворотов в горизонтальной плоскости, дополнительно перечеркнуты в этом случае знаком «X».
Городская машина содержит корпус 1, по углам которого установлены подрессоренные поворотные стойки (на черт. не обозначены) с управляемыми бортовым компьютером (на черт. не показан) опорно-поворотными устройствами 2, к которым крепятся силовые устройства для поворота колес 5 в горизонтальной плоскости (на черт. не обозначены) каждого из них на любой независимый от других угол, рассчитанный системой управления для выбранной водителем траектории. Кроме того, через кронштейн 3 подвески к опорно-поворотным устройствам 2 прикреплены ступицы 4 передних и задних колес 5, выполненные ведущими (см. фиг.1). Приводы колес 5 размещены внутри каждой из ступиц 4 и представляют собой индивидуальный регулируемый тяговый электродвигатель с согласующим редуктором и колесный тормоз (на черт. не показаны). На каждом из колес 5 с использованием кронштейнов 3 подвески закреплены приемопередающие элементы 6 радаров для определения расстояний до объектов окружающей обстановки, а также датчики углового положения колес в плоскости, параллельной поверхности движения, подключенные к бортовому компьютеру и обеспечивающие возможность обратной связи, необходимой единой системе управления поворотом для получения заданной траектории. Дополнительные датчики указанной системы могут быть также установлены непосредственно на корпусе 1 (на черт. не показаны). По периметру нижней части корпуса 1 закреплено наружное защитное ограждение, выполненное в виде упругоэластичного бампера 7. Для работы городской машины на улицах с односторонним движением двери 8 для пассажиров как входные, так и выходные могут быть выполнены как в левой, так и правой боковых стенах корпуса 1 (см. фиг.1…3). На крыше 9 внутри кожуха 10 размещена часть тягового оборудования (на черт. не показаны) со штангами 11, оборудованными автоматическими штангоуловителями (на черт. не показаны), которые предназначены как для работы городской машины в режиме троллейбуса, так и для зарядки аккумуляторных батарей (на черт. не показаны), предназначенных для работы в режиме электробуса, и имеют управление с рабочего места водителя. Конструкции индивидуальных стоек для колес и приводов для управления их поворотом типичны для многоопорных транспортных средств [2], поэтому отдельно не показаны. Помимо стандартных элементов, предусмотренных правилами безопасности дорожного движения, в виде системы звуковой сигнализации (на черт. не показана), приборов внешней световой сигнализации 12, стеклоочистителей 13 и зеркал заднего вида 14 на корпусе 1 дополнительно установлен звуковой зуммер (на черт. не показан) и светодиодные указатели 15 направления движения машины в виде знаков «Направление поворота» - по торцам и указатели 16 «Прочие опасности» - по углам боковых стен корпуса 1. Звуковой зуммер и светодиодные указатели 15 выполнены работающими синхронно в пульсирующем режиме во время маневров, связанных с опасностью для участников дорожного движения. Над входными и выходными дверями 8, а также со стороны заднего торца корпуса 1 (см. фиг.1, 2 и 3) установлены видеокамеры 17, изображение с которых передается на рабочее место водителя.
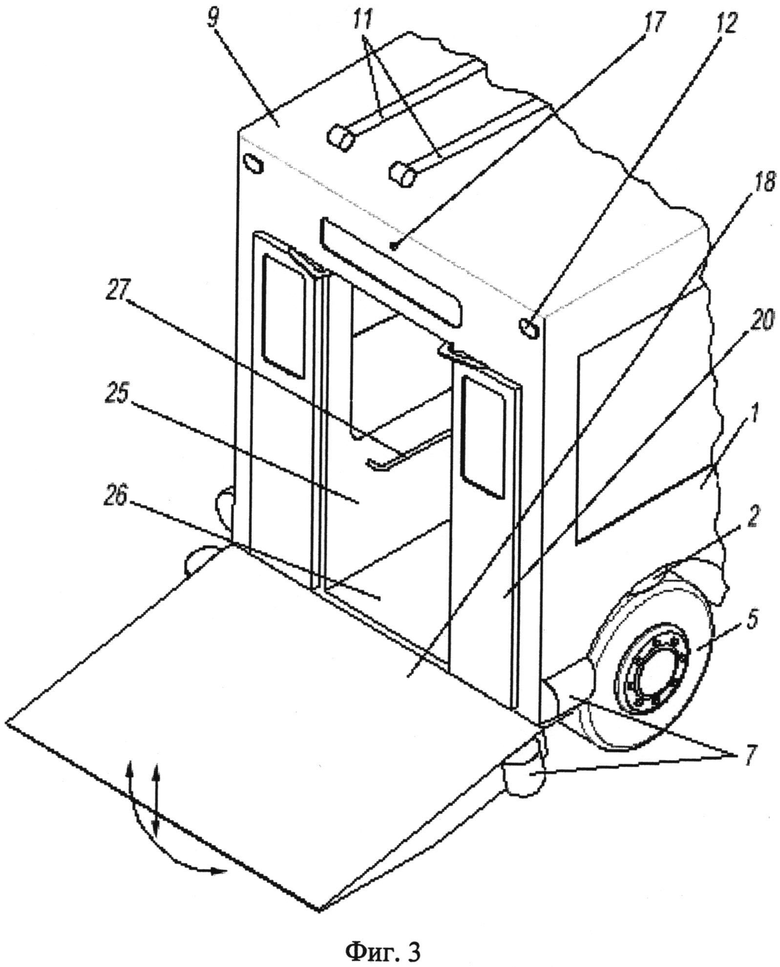
Для ускорения посадки лиц с ограниченной подвижностью на заднем торце корпуса 1 может быть закреплена складная платформа 18 (фиг.3), имеющая покрытие от проскальзывания ног или колес кресел-колясок (на черт. не показаны) и снабженная приводом 19 (см. фиг.1 и 2). Въезд кресел-колясок внутрь корпуса 1 и выезд на платформу 18 осуществляется через дополнительные двери 20, которые оснащены переговорным устройством и кнопками вызова водителя (на черт. не показаны).
Так как городская машина предназначена для перевозок в условиях плотного транспортного потока на сравнительно небольшие расстояния в центральной части городов, то для повышения ее мобильности и маневренности вместимость внутреннего объема корпуса 1 - пассажирского салона 21 ограничена до средней (см. фиг.4). При этом снижено число сидений 22, которые, в свою очередь, размещены вдоль стен, имеют перила 23 и вертикальные стойки 24 для подпотолочных поручней (на черт. не показаны). Под сиденьями 22 располагаются аккумуляторные батареи повышенной емкости (на черт. не показаны), предназначенные для питания тяговых электродвигателей колес 5 городской машины в режиме электробуса. За внутренними стенками 25 установлены поворотные опоры задних колес 5, силовое и вспомогательное оборудование, а также механизм подъема платформы 18 (на черт. не показаны). В задней части салона 21 располагается площадка 26 для кресел-колясок лиц с ограниченной подвижностью, а на стенках 25 имеются поручни 27. В передней части салона 21 за перегородкой 28 с дверью 29 расположено рабочее место 30 водителя, снабженное элементами управления и приборной панелью 31 (штатные приборы, элементы управления и сигнализации условно не показаны) и рулевым колесом 32.
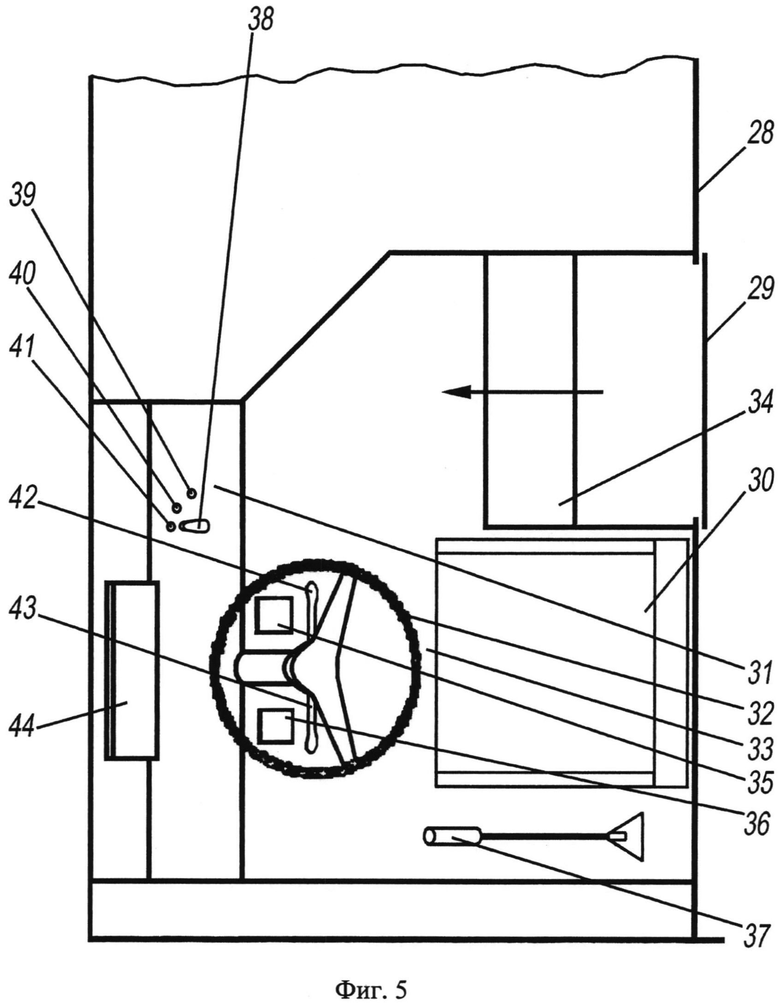
Обычно конструкции поворотных стоек колес 5 в силу компоновочных особенностей подвески имеют большие габариты по высоте, поэтому в машине с низким уровнем пола рабочее место 30 водителя размещено на подиуме 33, к которому примыкают ступеньки 34 (см. фиг.4 и 5). Для оперативного управления движением городской машины помимо общепринятых рулевого колеса 32 (см. фиг.5), пусковой и тормозной педалей 35 и 36, соответственно, рычага 37 ручного тормоза у водителя имеются переключатель 38 режимов работы со световыми индикаторами 39, 40, 41. Индикатор 39 соответствует основному режиму движения, который характеризуется принудительно заблокированными от поворота в плане задними и управляемыми рулевым колесом 32 передними колесами 5. Индикатор 40 соответствует особому режиму движения со всеми управляемыми колесами и произвольным центром поворота, а индикатор 41 - особому плоскопараллельному режиму движения или движению «крабом», при котором отключается рулевое колесо 32. Имеются также фиксируемые подрулевые рукоятки 42 и 43 выбора соотношения между поперечным и продольным плоскопараллельным движением машины, соответственно (или в другом режиме - задания центра ее поворота). Наличие подрулевых рукояток 42 и 43 позволяет водителю оперативно управлять координатами центра поворота городской машины, сохраняя при этом надежный контакт с рулевым колесом 32. Перед водителем для визуального контроля фактической траектории городской машины, а также отображения окружающей дорожной обстановки (см. фиг.6…11) на приборной панели 31 установлен дисплей 44 бортового компьютера (на черт. не показан). Дисплей 44 бортового компьютера отображает видеоинформацию от видеокамер 17, совмещая ее с планом окружающей обстановки, полученной с помощью радаров 6 и системы навигации. Кроме этого, видеоинформация дополняется изображением коридора движения, прогнозируемого бортовым компьютером в зависимости от заданного водителем центра поворота или вида движения. При этом дисплей 44 может быть выполнен интерактивным сенсорным.
При наличии интерактивного сенсорного дисплея 44 водитель имеет возможность за счет соответствующих прикосновений пальцев руки к экрану оперативно управлять параметрами движения машины во время маневров, связанных с опасностью для участников дорожного движения, т.е. выполнять сложнейшие маневры в особых режимах движения городской машины, при которых все колеса 5 - управляемые, а скорость аппаратно ограничена до скорости пешехода, изменяя при этом параметры поворота, скоростной режим, интенсивность торможения и т.п. Показанная на фиг.6 окружающая городскую машину дорожная обстановка, видимая на дисплее 44 бортового компьютера, представляет схематическое изображение корпуса 1, которое всегда расположено по центру экрана и не меняет углового положения. Например, в данном случае городская машина расположена в зоне остановки 45, которая примыкает к подземному переходу 46, ведущему к основному объекту 47. Кроме того, здесь представлены контактные провода 48 и строения 49, а также условные изображения подвижных и неподвижных транспортных средств 50 и 51, соответственно, полученные после обработки бортовым компьютером сигналов от системы навигации, бортовых видеокамер 77 и приемопередающих элементов радаров 6. Показанные на фиг.7 и 8 изображения с дисплея 44 окружающей дорожной ситуации характеризуют картину, возникающую при отъезде городской машины от остановки 45 (уличная карта повернута), а на фиг.9 - показано движение машины на перекрестке данной улицы с главной магистралью 52. Показанное на фиг.10 изображение характеризует картину, возникающую для городской машины на приспособленной для нее остановке со специальным заездным карманом 53. На границах заездного кармана 53 имеются расположенные на уровне тротуара отбойники 54, предназначенные для создания зоны въезда-выезда через задние двери 20 колясок лиц с ограниченной подвижностью, а также для защиты людей, стоящих на остановке, от транспортных средств, не соблюдающих скоростной режим. На фиг.11 представлено изображение экскурсионного варианта городской машины во время ее остановки для посадки-высадки пассажиров в зоне автостоянки 55.
Работа предлагаемого устройства осуществляется следующим образом.
Основным источником энергии городской машины (в режиме электробуса) при перемещении по узким криволинейным улицам, на которых затруднено создание контактных сетей, являются расположенные под сиденьями 22 аккумуляторные батареи повышенной емкости, подзаряжаемые от троллейбусных контактных проводов 48 при помощи штанг 11 и тягового оборудования в зонах отстоя конечных остановок или на магистральных трассах. В результате отпадает необходимость в организации по городу сети специальных силовых розеток для подзарядки аккумуляторов городской машины, по сути, являющейся симбиозом электробуса и троллейбуса. Предельная скорость машины в случаях особых режимов движения ограничена системой управления до средней скорости пешеходов. Оценка окружающей городскую машину дорожной обстановки производится в режиме реального времени при помощи системы определения расстояний до окружающих машину объектов. Для этого приемопередающие элементы 6 радаров могут переключаться в направлениях, в которых перемещаются колеса 5, на кронштейнах которых они закреплены. Поскольку в одном направлении движения обычно повернуты не менее двух колес, это дает возможность с помощью закрепленных на их кронштейнах датчиков 6 и соответствующей обработки на бортовом компьютере оценить скорость, положение и габариты препятствия с отображением результатов на экране дисплея. Полученные данные о текущей дорожной обстановке накладываются на карту глобальной системы позиционирования, адаптированную для общественного транспорта. В сложных условиях текущая дорожная ситуация на экране дисплея 44 может быть преобразована в полупрозрачный слой, наложенный на изображение от видеокамер 17, например, показывающих реальные условия на пассажирской остановке 45.
Для ускорения посадки в салон 21 или высадки пассажиров с ограниченной подвижностью на заднем торце корпуса 1 для них предусмотрены отдельные двери 20, которые открываются по запросу пассажира или посредством переговорного устройства или с помощью кнопки вызова водителя после перевода складной платформы 18 приводом 19 из транспортного положения в рабочее. Контроль над всеми операциями производится водителем по изображению на экране дисплея 44 от видеокамеры 17, установленной над отдельными задними дверьми 20. Кроме того, в дополнение к переговорному устройству может быть включен речевой информатор (на черт. не показан), предупреждающий пассажиров на остановке об опасности. После подъема и фиксации кресла-коляски на площадке 26 двери 20 закрываются, а складная платформа 18 переводится в транспортное положение, после чего фиксируется.
Городская машина у объекта 47 с массовой высадкой или посадкой пассажиров, в отличие от традиционных средств общественного транспорта, надолго не перекрывает движение по узкой улице, на которой часто невозможно сделать заездные карманы для остановок, поскольку имеет возможность осуществлять указанные действия в зависимости от обстоятельств на любой из ее сторон и только в пределах обозначенной остановки 45 (см. фиг.6). Для этого водитель после кратковременной остановки на полосе движения с помощью переключателя режимов 38 переходит из основного режима движения в особый плоскопараллельный режим, при котором совместно включаются звуковой зуммер и светодиодные указатели 15 и 16, соответственно, направления движения машины, а также отключается рулевое колесо 32. Далее он отклоняет от среднего положения рукоятку 42 (выбор направления «влево - вправо» здесь аналогичен выбору переключателем поворотов обозначения направления траектории) и тем самым дает команду на поворот всех колес 5 поперек относительно продольной оси машины. При этом включаются звуковой зуммер и светодиодные указатели 15 и 16 направления, а также видеокамеры 17, расположенные над входными и выходными дверями 8 с той стороны машины, в направлении которой будет осуществляться движение.
Если необходимо перемещение под углом к продольной оси городской машины, то необходимый угол направления перемещения выбирается соотношением соответствующих отклонений рукояток 42 и 43. При этом на дисплее 44 дается изображение возможного коридора движения машины и направление перемещения отдельных колес 5 в виде стилизованных стрелок. Если какое-либо из колес 5 при маневре остается неподвижным, то оно остается изображенным на экране в виде прямоугольника. На время высадки и посадки пассажиров звуковой зуммер и светодиодные указатели 15 и 16 направления отключаются. Благодаря тому, что городская машина приобретает способность двигаться к своей остановке строго параллельно своей поперечной оси, поэтому после соответствующей корректировки законодательства появляется возможность парковки обычных автомобилей практически сразу за пределами обозначенной зоны остановки 45 (размеры которой должны учитывать дополнительную зону для беспрепятственной посадки через задние двери лиц с ограниченной подвижностью). Это позволяет у каждой такой остановки дополнительно освобождать под парковку автомобилей несколько десятков метров.
После завершения посадки пассажиров и закрытия дверей 8 водитель переводит на приборной панели 31 переключатель 38 режимов в особый режим движения, то есть со всеми одновременно управляемыми колесами 5 и с произвольным центром поворота (см. фиг.7). Далее, после воздействия на рукоятки 42 и 43 для выбора поперечного и продольного положения, соответственно, точки С центра поворота, вновь включаются звуковой зуммер и светодиодные указатели 15 и 16 направления, наиболее удаленные от точки С. Если плотность транспортного потока высока, то водитель машины, нажав пусковую педаль 35, в состоянии в него вернуться даже при появлении небольшого окна между остановившимися автомобилями 51, въехав в зазор углом задней части машины. При этом водитель при помощи своей задней торцевой или (и) соответствующей боковой видеокамеры 17 имеет возможность контролировать дорожную ситуацию.
После занятия углом задней части машины места в основном потоке водитель, воздействуя на рукоятки 42 и 43 выбора поперечного и продольного точки С центра поворота, по изображениям на дисплее 44 возможных траекторий выбирает наиболее оптимальную для последующего перемещения передней части машины в основной транспортный поток (см. фиг.8). Для исключения транспортных пробок при маневрировании машины процесс переноса ее центра поворота (см. фиг.7 и 8) может производиться без промежуточных остановок. После достаточного для маневра смещения впереди идущего автомобиля 50 водитель городской машины нажимает на пусковую педаль 35, занимает свою нишу в основном транспортном потоке и переводит переключатель 38 режимов в основной режим движения. По этой команде системой управления поворотом машины задние колеса 5 выставляются параллельно продольной оси корпуса 1 и принудительно блокируются замковыми механизмами (на черт. не показаны).
На экране дисплея 44 при указанной блокировке поверх изображений задних колес 5 появляются знаки «X», а звуковой зуммер вместе со светодиодными указателями 15 и 16 направления отключаются (см. фиг.9). Кроме того, в основном режиме движения по условию опрокидывания на высокой скорости аппаратно ограничиваются предельные углы поворота передних колес 5. Система принудительной механической блокировки задних колес 5 позволяет также обеспечить безопасную эвакуацию машины в случае обесточивания электрооборудования.
При прямолинейном движении городской машины точка С центра поворота условно изображается в ее геометрическом центре. При непредвиденном изменении обстановки по основному маршруту (перекрытие движения из-за массовых мероприятий и т.п.) городская машина имеет возможность под контролем служб обеспечения безопасности дорожного движения объехать закрытый участок путем резкого изменения направления движения. Для этого после выезда на перекресток водитель должен перейти в особый режим движения, то есть со всеми управляемыми колесами 5 и произвольным центром поворота, поместив, например, точку С центра поворота в положение С′ и тем самым получая возможность развернуться вокруг этой точки по часовой стрелке (для правостороннего дорожного движения) относительно исходного направления (см. фиг.9). После установки штанг 11 на контактные провода 48 магистрали, расположенной в плане под значительным углом к первоначальной улице, городская машина может перейти на свой основной режим и далее двигаться в объезд закрытого для нее участка как обычный троллейбус. Аналогичные действия могут быть произведены и для разворота на полосу встречного движения, а также разворота вокруг геометрического центра городской машины для движения в обратном направлении (например, при обслуживании тупиковых участков улиц).
При достаточно большой ширине тротуара для городской машины могут быть выполнены специальные заездные карманы 53 (см. фиг.10). Помимо небольшой протяженности, их главное отличие от обычных остановок для общественного транспорта заключается в специальных отбойниках 54, благодаря которым кресла-коляски для въезда на грузоподъемную платформу 18 могут не съезжать с тротуара по его спускам на мостовую. Кроме того, наличие у отбойников 54 расположенных под углом к бордюру тротуара внешних кромок способствует направлению автомобилей с неадекватными водителями прочь от остановки общественного транспорта.
Благодаря своей маневренности и мобильности городская машина может быть использована в качестве экскурсионного электробуса. Однако в данной ситуации места расположения остановок общественного транспорта могут не всегда совпадают с интересующими туристов объектами (см. фиг.11). В этом случае посадку и высадку пассажиров можно произвести на зарезервированном для данных целей участке обычной автостоянки, а для повышения безопасности высадка и посадка экскурсантов производится через дополнительные двери 20 в заднем торце корпуса 1 по опущенной на тротуар платформе 18.
Таким образом, изобретение позволяет повысить мобильность и маневренность городской машины, а также безопасность ее пассажиров и других участников движения в сложной дорожной обстановке как в нормальном режиме работы, так и во время особых режимов перемещения машины.
Источники информации
1. Максимов, А.Н. Городской электротранспорт. Троллейбус: учебник для нач. проф. образования / А.Н. Максимов. - М.: Изд-во «Академия», 2004. - 256 с.
2. Белоусов, Б.Н. Колесные транспортные средства особо большой грузоподъемности. Конструкция. Теория. Расчет / Б.Н. Белоусов, С.Д. Попов; под общей ред. Б.Н. Белоусова. - М. Изд-во МГТУ им. Н.Э. Баумана, 2006. - 728 с.
3. Патент ЕР №0417820А2 кл. В60К 8/00, B62D 31/02 от 26.07.90 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Автономный мобильный многофункциональный роботизированный комплекс | 2017 |
|
RU2722301C1 |
| СИСТЕМА УПРАВЛЕНИЯ ДВИЖЕНИЕМ БЕСПИЛОТНЫХ ТРАНСПОРТНЫХ СРЕДСТВ С ЭЛЕКТРОПРИВОДОМ | 2022 |
|
RU2789153C1 |
| АВТОБУСНЫЙ ТРЕНАЖЕР | 2011 |
|
RU2467400C1 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПРИ ДВИЖЕНИИ БЕЗРЕЛЬСОВОМУ ЭЛЕКТРО- И ГИБРИДНОМУ ТРАНСПОРТУ | 2017 |
|
RU2679489C9 |
| ИНТЕЛЛЕКТУАЛЬНАЯ ТРАНСПОРТНАЯ СИСТЕМА И СПОСОБ ЕЁ ИСПОЛЬЗОВАНИЯ | 2010 |
|
RU2533645C2 |
| МНОГОФУНКЦИОНАЛЬНАЯ АВТОМОБИЛЬНАЯ СИСТЕМА ВИДЕОНАБЛЮДЕНИЯ | 2011 |
|
RU2480356C2 |
| АВТОНОМНАЯ РОБОТИЗИРОВАННАЯ ПАССАЖИРСКАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2014 |
|
RU2586758C2 |
| СПОСОБ И УСТРОЙСТВО ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ ПРИ ДВИЖЕНИИ БЕЗРЕЛЬСОВОМУ ЭЛЕКТРО- И ГИБРИДНОМУ ТРАНСПОРТУ | 2017 |
|
RU2701718C2 |
| Система помощи водителю наземного транспортного средства при обгоне | 2023 |
|
RU2831762C1 |
| ТЕЛЕМЕТРИЧЕСКАЯ СИСТЕМА АВТОМОБИЛЯ | 2003 |
|
RU2258012C2 |

Городская машина содержит корпус (1), приводы передних и задних колес (5), видеокамеры наружного наблюдения, радары для определения расстояний до объектов окружающей обстановки. Приемопередающие элементы радаров (6) размещены на каждом из колес совместно с датчиками их углового положения. Приводы колес снабжены индивидуальными электродвигателями, размещенными внутри каждой из ступиц, а также силовыми устройствами для поворота в горизонтальной плоскости каждого из них на любой независимый от других колес угол, рассчитанный системой управления для выбранной водителем траектории, включая плоскопараллельное движение городской машины в любом направлении. Видеокамеры установлены над всеми дверями (8), а также со стороны заднего торца корпуса с возможностью передачи на дисплей полученного изображения, совмещенного с планом окружающей обстановки, полученного с помощью радаров и системы навигации и дополненного изображением прогнозируемого бортовым компьютером коридора движения в зависимости от заданного водителем центра поворота или вида движения. Достигается повышение мобильности и маневренности городской машины, а также безопасности пассажиров и прочих участников дорожного движения. 6 з.п. ф-лы, 11 ил.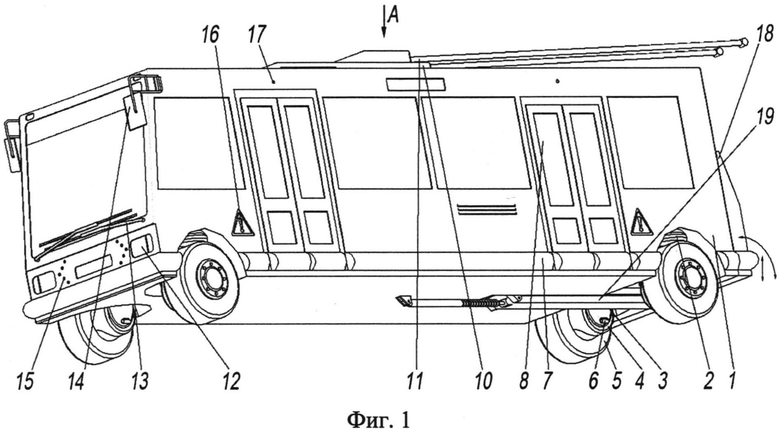
1. Городская машина, содержащая корпус в виде пассажирского салона, с входными и выходными дверями и с сиденьями вдоль стен, приводы передних и задних колес, выполненных ведущими и имеющих единую систему управления поворотом, включающую датчики углового положения колес в плоскости, параллельной поверхности движения, подключенные к бортовому компьютеру и обеспечивающие возможность обратной связи, необходимой для получения заданной траектории, а также рабочее место водителя, снабженное элементами управления и приборной панелью, отличающаяся тем, что машина дополнительно снабжена дисплеем бортового компьютера, видеокамерами наружного наблюдения, элементами системы навигации, радарами для определения расстояний до объектов окружающей обстановки, при этом дисплей выполнен интерактивным и сенсорным с возможностью оперативного управления водителем параметрами движения во время маневров, связанных с опасностью для участников дорожного движения и установлен на приборной панели, а видеокамеры - над всеми дверями, а также со стороны заднего торца корпуса с возможностью передачи на дисплей полученного изображения, совмещенного с планом окружающей обстановки, полученного с помощью радаров и системы навигации и дополненного изображением прогнозируемого бортовым компьютером коридора движения в зависимости от заданного водителем центра поворота или вида движения, причем приемопередающие элементы радаров размещены на каждом из колес совместно с датчиками их углового положения, а приводы колес снабжены индивидуальными электродвигателями, размещенными внутри каждой из ступиц, а также силовыми устройствами для поворота в горизонтальной плоскости каждого из них на любой независимый от других колес угол, рассчитанный системой управления для выбранной водителем траектории, включая плоскопараллельное движение городской машины в любом направлении.
2. Машина по п. 1, отличающаяся тем, что входные и выходные двери для пассажиров выполнены как в левой, так и в правой боковых стенах корпуса при обеспечении средней вместимости салона городской машины.
3. Машина по п. 1, отличающаяся тем, что по торцам корпуса установлен световой двусторонний знак, указывающий на выбранное системой управления направление движения данной части машины, а по краям его боковых стен - знаки прочих опасностей.
4. Машина по п. 1, отличающаяся тем, что для лиц с ограниченной подвижностью на заднем торце корпуса выполнены дополнительные двери, оснащенные переговорным устройством и кнопками вызова водителя, а также складная платформа.
5. Машина по п. 1, отличающаяся тем, что машина снабжена аккумуляторами повышенной емкости для работы в режиме электробуса.
6. Машина по п. 1, отличающаяся тем, что машина снабжена дополнительными средствами повышения безопасности в виде системы звуковой и световой сигнализации, дополненных звуковым зуммером и светодиодными указателями направления движения машины, соответственно, работающими совместно в пульсирующем режиме во время маневров, связанных с опасностью для участников дорожного движения, причем светодиодные указатели установлены по углам торцевых и боковых стен корпуса
7. Машина по п. 1, отличающаяся тем, что машина снабжена наружным защитным ограждением, выполненным в виде закрепленного по периметру нижней части корпуса упругоэластичного бампера.
| 1973 |
|
SU417820A1 | |
| Способ защиты переносных электрических установок от опасностей, связанных с заземлением одной из фаз | 1924 |
|
SU2014A1 |
| US7956310B2, 02.02.2010 | |||
| JP20070088270A, 18.01.2007 | |||
| Многоступенчатая активно-реактивная турбина | 1924 |
|
SU2013A1 |
| Прибор, замыкающий сигнальную цепь при повышении температуры | 1918 |
|
SU99A1 |
| JP2001322557A, 20.11.2001 | |||
| JP2000326711A, 28.11.2000 | |||
| US5865593A, 02.02.1999 | |||

