Изобретение относится к технике измерений, может использоваться в геодезическом приборостроении и локации и предназначено преимущественно для измерения угловых координат быстро движущихся объектов, например, летательных аппаратов.
Известен электронный теодолит, содержащий пульт управления и объектив канала наблюдения, установленный на опорно-поворотном устройстве, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выходы которых подключены соответственно к первому и второму входам преобразователя угол-код, выход которого соединен с входом цифрового табло [1].
Известный электронный теодолит обеспечивает высокую точность измерения угловых координат и удобство их считывания оператором при геодезических измерениях.
Однако известный электронный теодолит не позволяет выполнять дистанционные измерения угловых координат быстро движущихся объектов, поскольку оператор должен находиться в месте установки электронного теодолита и за один цикл измерения оператором угловых координат движущегося объекта в одной точке его траектории движения движущийся объект выходит из поля зрения оператора.
Технический результат состоит в обеспечении возможности выполнять дистанционные измерения угловых координат быстро движущихся объектов, например, летательных аппаратов.
Для достижения указанного технического результата в электронно-цифровое устройство измерения угловых координат, содержащее пульт управления, опорно-поворотное устройство, механизмы горизонтального и вертикального наведения которого содержат соответственно горизонтальный и вертикальный диски с кодовыми дорожками, оптически связанные с ними соответственно блок считывания с горизонтального диска и блок считывания с вертикального диска, выход последнего из которых подключен к входу первого преобразователя угол-код, введены второй преобразователь угол-код, вход которого соединен с выходом блока считывания с горизонтального диска, видеоконтрольное устройство, устройство регистрации информации, блок формирования отсчетов, блок управления и преобразования информации, блок формирования синхросигналов, блок преобразования видеосигналов, закрепленные в опорно-поворотном устройстве фотоприемные устройства канала наблюдения, соответствующие видеоконтрольные адаптеры, многосекционный оптико-механический блок, секции которого оптически связанны с соответствующими фотоприемными устройствами канала наблюдения, аналоговые выходы которых подключены к информационным входам соответствующих видеоконтрольных адаптеров канала наблюдения, а цифровые выходы - к первой входной шине устройства регистрации информации, вторая входная шина которого соединена с цифровым выходом блока управления и преобразования информации, третий вход которого является информационным входом устройства, а первый синхровыход подключен к входу блока формирования синхросигналов, первый выход которого соединен с входом блока формирования отсчетов, второй выход - с синхровходами фотоприемных устройств канала наблюдения, третий выход - с синхровходами видеоконтрольных адаптеров канала наблюдения, выходы которых подключены к соответствующим информационным входам блока преобразования видеосигналов, выход которого соединен с входом видеоконтрольного устройства, а синхровход - со вторым синхровыходом блока управления и преобразования информации, первый и второй входы которого подключены к выходам соответственно первого и второго преобразователей угол-код, управляющие входы которых соединены соответственно с первым и вторым выходами блока формирования отсчетов, при этом пульт управления выполнен дистанционным, а его первый и второй выходы подключены к управляющим входам соответственно механизмов вертикального и горизонтального наведения.
В предпочтительном варианте исполнения электронно-цифровое устройство измерения угловых координат содержит многосекционный оптико-механический блок с четырьмя секциями, четыре фотоприемные устройства канала наблюдения и четыре видеоконтрольных адаптера.
Фотоприемное устройство канала наблюдения содержит матрицу фотодетекторов, оптические входы которой являются оптическим входом фотоприемного устройства канала наблюдения, а выходы соединены с входной шиной устройства считывания информации, выход которого является аналоговым выходом фотоприемного устройства канала наблюдения и подключен к входу аналого-цифрового преобразователя, выход которого является цифровым выходом фотоприемного устройства канала наблюдения, а синхровход соединен с синхровходом устройства считывания информации и является синхровходом фотоприемного устройства канала наблюдения.
Блок управления и преобразования информации содержит блок синхронизации, первый и второй выходы которого являются соответственно первым и вторым синхровыходами блока управления и преобразования информации, преобразователь кодов, выход, первый и второй входы которого являются соответственно цифровым выходом, первым и вторым входами блока управления и преобразования информации, а третий вход соединен с выходом преобразователя время-код, вход которого является третьим входом блока управления и преобразования информации.
Видеоконтрольное устройство включает либо телевизионный монитор, либо жидкокристаллический монитор. Соответственно видеоконтрольный адаптер выполнен с возможностью формирования либо аналогового видеосигнала, либо цифрового видеосигнала.
Предлагаемое электронно-цифровое устройство измерения угловых координат обеспечивает высокую точность дистанционного измерения угловых координат летательных аппаратов с использованием составного канала наблюдения, формирующего общее поле обзора за счет применения нескольких, например четырех, оптически сопряженных отдельных каналов наблюдения.
При этом достигается положительный технический результат - увеличение угла поля зрения электронно-цифрового устройства измерения угловых координат быстро движущихся объектов, например летательных аппаратов.
Проведенный заявителем анализ уровня техники, включая поиск по патентным и научно-техническим источникам информации и выявление источников, содержащих сведения об аналогах заявленного технического решения, позволил установить, что заявитель не обнаружил источник, характеризующийся признаками, тождественными (идентичными) всем существенным признакам заявленного технического решения. Определение из перечня выявленных аналогов прототипа, как наиболее близкого по совокупности признаков аналога, позволило установить совокупность существенных по отношению к усматриваемому заявителем техническому результату отличительных признаков заявленного электронно-цифрового устройства измерения угловых координат, изложенных в формуле изобретения. Следовательно, заявленное техническое решение соответствует критерию "новизна".
Проведенный заявителем дополнительный поиск не выявил известные решения, содержащие признаки, совпадающие с отличительными от прототипа признаками заявленного электронно-цифрового устройства измерения угловых координат. Следовательно, заявленное техническое решение не вытекает для специалиста явным образом из известного уровня техники, поскольку из уровня техники, определенного заявителем, не выявлено влияние предусматриваемых существенными признаками заявленного технического решения преобразований для достижения технического результата. Заявленное техническое решение не основано на изменении количественного признака (признаков), представлении таких признаков во взаимосвязи, либо изменении ее вида. Следовательно, заявленное техническое решение соответствует критерию "изобретательский уровень".
Предлагаемое электронно-цифровое устройство измерения угловых координат может быть реализовано с помощью известных функциональных элементов.
На фиг.1 приведена функциональная схема предпочтительного варианта исполнения заявленного электронно-цифрового устройства измерения угловых координат.
Электронно-цифровое устройство измерения угловых координат содержит многосекционный оптико-механический блок 1 с четырьмя секциями, четыре фотоприемных устройства 2, 3, 4 и 5 канала наблюдения, четыре видеоконтрольных адаптера 6, 7, 8 и 9, устройство 10 регистрации информации, блок 11 преобразования видеосигналов, блок 12 формирования синхросигналов, блок 13 управления и преобразования информации, блок 14 формирования отсчетов, первый и второй преобразователи 15 и 16 угол-код, блоки 17 и 18 считывания с вертикального и горизонтального дисков, опорно-поворотное устройство 19, механизм 20 вертикального наведения, который содержит вертикальный диск 21 с кодовой дорожкой, механизм 22 горизонтального наведения, который содержит горизонтальный диск 23 с кодовой дорожкой, пульт 24 дистанционного управления и видеоконтрольное устройство 25. Многосекционный оптико-механический блок 1 установлен на опорно-поворотном устройстве 19, все четыре его секции оптически связаны с соответствующими фотоприемными устройствами 2, 3, 4 и 5 канала наблюдения, которые закреплены с возможностью юстировки в опорно-поворотном устройстве 19 и образуют общее поле обзора составного канала наблюдения устройства. Вертикальный и горизонтальный диски 21 и 23 с кодовыми дорожками механизмов 20 и 22 вертикального и горизонтального наведения опорно-поворотного устройства 19 оптически связаны с блоками 17 и 18 считывания соответственно с вертикального и горизонтального дисков, выходы которых подключены к входам соответственно первого и второго преобразователей 15 и 16 угол-код, выходы которых соединены соответственно с первым и вторым входами блока 13 управления и преобразования информации, а их управляющие входы подключены соответственно к первому и второму выходам блока 14 формирования отсчетов, вход которого соединен с первым выходом блока 12 формирования синхросигналов.
Первый и второй выходы пульта 24 дистанционного управления подключены к управляющим входам соответственно механизмов 20 и 22 вертикального и горизонтального наведения. Второй выход блока 12 формирования синхросигналов подключен к синхровходам фотоприемных устройств 2, 3, 4 и 5 канала наблюдения, цифровые выходы которых подключены к первой входной шине устройства 10 регистрации информации, вторая входная шина которого соединена с цифровым выходом блока 13 управления и преобразования информации, третий вход которого является информационным входом устройства. Третий выход блока 12 формирования синхросигналов подключен к синхровходам видеоконтрольных адаптеров 6, 7, 8 и 9, выходы которых соединены с соответствующими информационными входами блока 11 преобразования видеосигналов, выход которого подключен к входу видеоконтрольного устройства 25, а синхровход - ко второму синхровыходу блока 13 управления и преобразования информации, первый синхровыход которого соединен с входом блока 12 формирования синхросигналов.
Видеоконтрольное устройство 25 включает либо телевизионный монитор, либо жидкокристаллический монитор. Соответственно видеоконтрольные адаптеры 6, 7, 8 и 9 выполнены с возможностью формирования либо аналогового видеосигнала, либо цифрового видеосигнала.
Предлагаемое электронно-цифровое устройство измерения угловых координат обеспечивает высокую точность дистанционного измерения угловых координат летательных аппаратов с использованием составного канала наблюдения, формирующего общее поле обзора за счет применения нескольких, например, четырех, оптически сопряженных отдельных каналов наблюдения.
Устройство работает следующим образом.
Электронно-цифровое устройство измерения угловых координат устанавливают и горизонтируют в точке стояния, видеоконтрольное устройство 25 и пульт 24 дистанционного управления размещают на необходимом для решения задач измерений расстоянии в месте нахождения оператора.
Изображение движущихся объектов, например летательных аппаратов, расположенных в точке наблюдения на заданной траектории их движения, делится на несколько, преимущественно на четыре, частей с помощью системы зеркал многосекционного оптико-механического блока 1 и проецируется на фотоприемные устройства 2, 3, 4 и 5 канала наблюдения, которые путем юстировки образуют общее поле обзора составного канала наблюдения устройства.
Для передачи изображений, формируемых фотоприемными устройствами 2, 3, 4 и 5 канала наблюдения и отображения их на стандартном видеоконтрольном устройстве 25 предназначены видеоконтрольные адаптеры 6, 7, 8 и 9 и блок 11 преобразования видеосигналов, который позволяет осуществить выбор любого из поступающих на его вход видеосигналов или их комбинаций и отображать на экране видеоконтрольного устройства 25 изображение, формируемое любым из фотоприемных устройств 2, 3, 4 или 5 канала наблюдения, или комбинационное изображение из этих изображений.
Блок 12 формирования синхросигналов синхронизирует работу всех фотоприемных устройств 2, 3, 4 и 5 канала наблюдения и видеоконтрольных адаптеров 6, 7, 8 и 9 и обеспечивает установку заданного стандарта (частоту кадров, число строк и число элементов на строке) при формировании видеосигнала для видеоконтрольного устройства 25.
Оператор наблюдает на экране видеоконтрольного устройства 25 движущиеся по заданной траектории объекты, например, летательные аппараты, и наводит на них электронно-цифровое устройство измерения угловых координат с помощью пульта 24 дистанционного управления, воздействуя на механизмы 20 и 22 вертикального и горизонтального наведения опорно-поворотного устройства 19.
Взятие необходимого числа вертикальных или горизонтальных отсчетов координат движущихся объектов в различных точках траектории движения летательных аппаратов и их привязку к системе единого времени (СЕВ) осуществляют путем одновременной покадровой регистрации изображения движущихся объектов, значений соответствующих каждому кадру углов (угла места и азимута) и меток времени СЕВ в устройстве 10 регистрации информации. Для этого цифровые сигналы последовательных кадров изображения движущихся объектов, например, в виде параллельного двоичного восьмиразрядного кода, подают с выходов фотоприемных устройств 2, 3, 4 и 5 канала наблюдения на первую входную шину устройства 10 регистрации информации. Одновременно на вторую входную шину устройства 10 регистрации информации с цифрового выхода блока 13 управления и преобразования информации подают цифровые сигналы со значениями соответствующих каждому кадру изображения углов (угла места и азимута) и меток времени СЕВ.
Значения соответствующих каждому кадру изображения углов (угла места и азимута) поступают на первый и второй входы блока 13 управления и преобразования информации с выходов соответственно первого и второго преобразователей 15 и 16 угол-код, входы которых соединены с выходами соответственно блоков 17 и 18 считывания с вертикального и горизонтального дисков. При этом блоки 17 и 18 считывания соответственно с вертикального и горизонтального дисков, первый и второй преобразователи 15 и 16 угол-код работают известным из прототипа образом.
Моменты времени, в которые производят отсчеты значений указанных выше углов, определяются по сигналам, поступающим на управляющие входы первого и второго преобразователей 15 и 16 угол-код соответственно с первого и второго выходов блока 14 формирования отсчетов, вход которого соединен с первым синхровыходом блока 13 управления и преобразования информации. Эти моменты времени могут быть привязаны к началу, середине или концу соответствующего кадра изображения движущихся объектов.
Включение и выключение режима записи устройства 10 регистрации информации могут осуществлять как автономно, так и дистанционно. В последнем случае пульт 24 дистанционного управления может иметь третий выход, а устройство 10 регистрации информации - управляющий вход, которые соединены между собой.
Изложенные выше сведения свидетельствуют о выполнении при использовании заявленного технического решения следующей совокупности условий:
- средства, воплощающие заявленное электронно-цифровое устройство измерения угловых координат при их осуществлении, предназначены для использования в промышленности, а именно в локации и геодезическом приборостроении;
- для заявленного электронно-цифрового устройства измерения угловых координат в том виде, как оно охарактеризовано в независимом пункте изложенной формулы изобретения, подтверждена возможность его осуществления с помощью описанных в заявке или известных до даты приоритета средств и методов.
Следовательно, заявленное техническое решение соответствует критерию "промышленная применимость".
При использовании предлагаемого электронно-цифрового устройства измерения угловых координат достигается увеличение угла поля зрения при высокой точности дистанционного измерения параметров траектории движения движущихся объектов, например, летательных аппаратов.
Литература
1. SU 1610272 А1, (ШУЛЬЦ В.Г. и др.), 30.11.1990.
| название | год | авторы | номер документа |
|---|---|---|---|
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343410C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2343411C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ БЫСТРО ДВИЖУЩИХСЯ ОБЪЕКТОВ | 2006 |
|
RU2324199C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343408C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2007 |
|
RU2343407C2 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ С ДИФФЕРЕНЦИАЛЬНОЙ И ИНТЕГРАЛЬНОЙ СЕЛЕКЦИЕЙ ПОДВИЖНЫХ ОБЪЕКТОВ НАБЛЮДЕНИЯ | 2014 |
|
RU2561310C1 |
| ЭЛЕКТРОННО-ЦИФРОВОЕ УСТРОЙСТВО ИЗМЕРЕНИЯ УГЛОВЫХ КООРДИНАТ | 2006 |
|
RU2358240C2 |
| УСТРОЙСТВО СЕЛЕКЦИИ ПОДВИЖНЫХ ЦЕЛЕЙ | 2013 |
|
RU2526890C1 |
| ЭЛЕКТРОННЫЙ ТЕОДОЛИТ | 2006 |
|
RU2316729C1 |
| ЭЛЕКТРОННЫЙ ТЕОДОЛИТ С БЛОКОМ ДИСТАНЦИОННОЙ ОПЕРАТИВНОЙ ОБРАБОТКИ ИЗМЕРИТЕЛЬНОЙ ИНФОРМАЦИИ | 2010 |
|
RU2437059C1 |
Изобретение относится к технике измерений, может использоваться в локации и геодезическом приборостроении и предназначено преимущественно для использования при измерениях угловых координат движущихся объектов, например, летательных аппаратов. Технический результат - увеличение угла поля зрения при высокой точности дистанционного измерения параметров траектории движения движущихся объектов. Электронно-цифровое устройство измерения угловых координат содержит многосекционный оптико-механический блок 1 с четырьмя секциями, четыре фотоприемных устройства 2, 3, 4 и 5 канала наблюдения, четыре видеоконтрольных адаптера 6, 7, 8 и 9, устройство 10 регистрации информации, блок 11 преобразования видеосигналов, блок 12 формирования синхросигналов, блок 13 управления и преобразования информации, блок 14 формирования отсчетов, первый и второй преобразователи 15 и 16 угол-код, блоки 17 и 18 считывания с вертикального и горизонтального дисков, опорно-поворотное устройство 19, механизм 20 вертикального наведения, который содержит вертикальный диск 21 с кодовой дорожкой, механизм 22 горизонтального наведения, который содержит горизонтальный диск 23 с кодовой дорожкой, пульт 24 дистанционного управления и видеоконтрольное устройство 25. 3 з.п. ф-лы, 1 ил.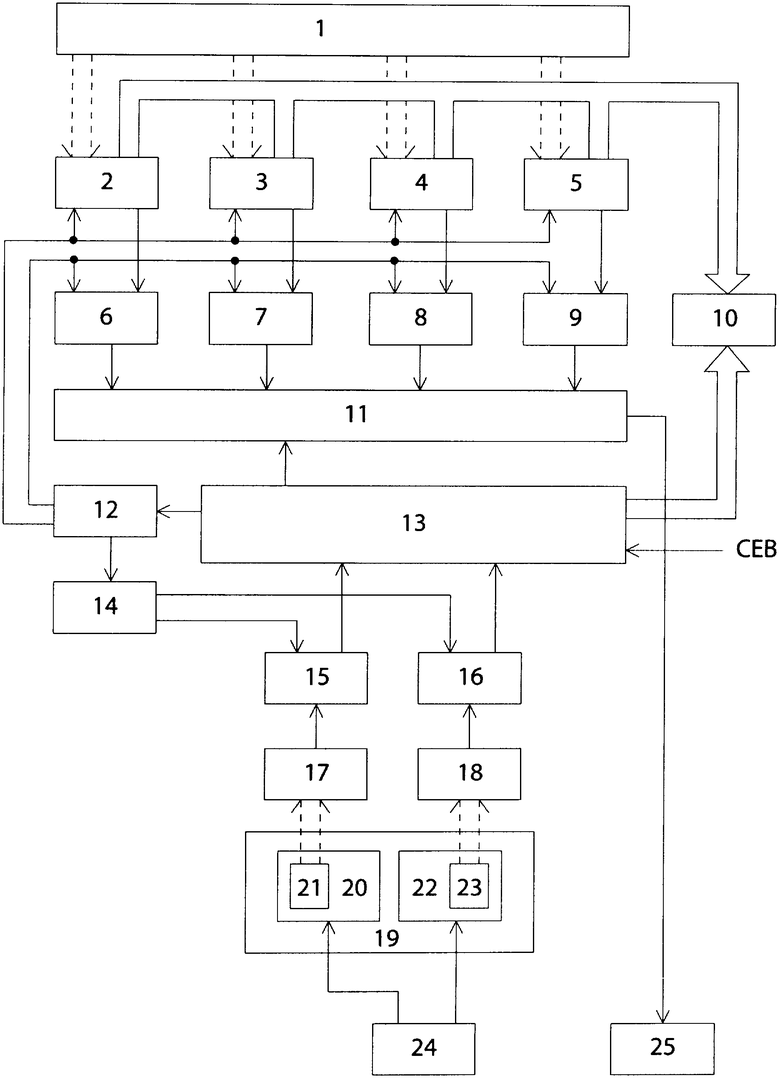
| Электронный теодолит | 1988 |
|
SU1610272A1 |
| Угломерный прибор | 1986 |
|
SU1315806A2 |
| JP 62034008 A, 14.02.1987 | |||
| JP 61095207 A, 14.05.1986 | |||
| Теодолит | 1986 |
|
SU1413424A1 |
| US 4355902 A, 26.10.1982. | |||

