Изобретение относится к области водных перевозок тяжеловесных негабаритных грузов, а более конкретно - к подъему, погрузке-выгрузке и транспортировке на судне затонувших объектов в пункт приема.
Известно устройство погрузки-выгрузки и транспортировки тяжеловесных негабаритных грузов к месту назначения, включающее судно - плавучее крановое средство большой мощности классов «Волгарь» и «Станислав Юдин» (см. «Судостроение, №6, июнь 1986 г.; Сотрудничество СССР и Финляндии в области судостроения. Под редакции Ю.Н.Горбачева. Л., «Судостроение», 1990, с.434).
Однако использование плавучих кранов и крановых судов и мобилизации крановых средств для выполнения указанных работ представляет собой дорогостоящую операцию по подъему, погрузке и разгрузке объектов.
Известно также устройство погрузки-выгрузки и транспортировки на плавсредстве реакторных отсеков утилизируемых атомных подводных лодок в пункт длительного хранения, включающее судно, имеющее два жестко соединенных между собой корпуса, тросовое грузоподъемное оборудование, балластную систему а пневматические кранцы, расположенные на корпусах судна.
Однако для подъема затонувших и засосавшихся в грунт большегрузных негабаритных объектов необходимо располагать установленными на судне дорогостоящими крупногабаритными грузоподъемными средствами, способными обеспечить выполнение предшествующей подъему объекта такой сложной и трудоемкой операции, как отрыв от грунта засосавшегося в него объекта. Кроме того, использование такого грузоподъемного оборудования не обеспечивает безопасности и надежности безаварийного выполнения отрыва от грунта затонувшего объекта, поскольку в момент времени непосредственно за отрывом возможно скачкообразное вертикальное перемещение судна с объектом, что может привести к аварийным ситуациям на всем комплексе.
Задачей предлагаемого изобретения является обеспечение отрыва от грунта затопленного негабаритного объекта и его погрузки-выгрузки с наименьшими материальными затратами, а также повышение безопасности и надежности процесса осуществления подъема и погрузки засосавшегося в грунт объекта.
Для этого у морского грузового судна для подъема, погрузки-выгрузки и транспортировки затонувших объектов в пункт приема, имеющего два жестко соединенных между собой корпуса, тросовое грузоподъемное оборудование, балластную систему и пневматические кранцы, размещенные на корпусах судна, по изобретению корпуса судна выполнены в виде понтонов, герметично разделенных прочными переборками на отсеки и соединенных между собой с помощью опорной платформы, расположенной не менее чем на четырех цилиндрических опорах, установленных на понтонах и выполненных в виде системы телескопических цилиндров, связанных трубопроводами с напорной гидравлической системой, которой оснащено судно. Причем цилиндрические опоры выполнены с возможностью осуществления как одновременного перемещения всех телескопических цилиндров, так и их взаимного перемещения порознь относительно друг друга, а балластная система содержит в своем составе упомянутые герметичные отсеки понтонов корпусов судна, снабженные кингстонами. При этом судно оборудовано движительно-рулевым комплексом и энергетической установкой и оснащено датчиком положения объекта относительно грунта, кренометром, дифферентометром, следящей системой, связанной с одной стороны с гидросистемой, а с другой - с датчиком положения объекта, с кренометром и с дифферентометром, и расположенным на опорной платформе постом управления, связанным с гидросистемой телескопических цилиндров, с тросовым грузоподъемным оборудованием, с балластной системой, с движительно-рулевым комплексом и с упомянутой следящей системой.
Кроме того, движительно-рулевой комплекс выполнен в виде погружных поворотных проточных гребных электродвижителей.
При этом гребные электродвижители выполнены в виде движителей шнекового типа.
Наряду с этим тросовое грузоподъемное оборудование включает «полотенца», связанные с ходовыми концами тросовой системы.
Кроме того, корпуса судна представляют собой прочные корпуса утилизируемых подводных лодок.
Причем часть герметических отсеков корпусов судна включает в себя топливные цистерны энергетической установки.
Выполнение корпусов судна в виде понтонов и разделение их полости на герметичные отсеки, включенные в балластную систему судна, обеспечивает снижение материальных затрат на создание морского грузоподъемного и транспортного средства, а также большую грузоподъемность и гарантированный отрыв засосавшегося в грунт объекта за счет дебалластировки судна.
Использование в качестве грузоподъемных средств, установленных на корпусах судна, телескопических цилиндров, сообщенных с напорной гидросистемой, на которых расположена опорная платформа, обеспечивает большую грузоподъемность по сравнению с существующим крановым оборудованием и безопасность в процессе подъема затонувшего объекта.
Выполнение цилиндрических опор в виде системы телескопических цилиндров, имеющих возможность осуществления как одновременного перемещения всех цилиндров в опорах, так и порознь каждого цилиндра относительно друг друга, а также оснащение судна связанной с гидросистемой, с датчиком положения объекта относительно грунта, а также с дифферентометром и кренометром судна следящей системой позволяет осуществлять контролируемый и постепенный отрыв от грунта засосавшегося в него затонувшего объекта, исключая скачкообразное вертикальное перемещение судна с объектом в момент его отрыва от грунта, и тем самым обеспечить безаварийность при выполнении процесса подъема и погрузки на судно затонувшего объекта.
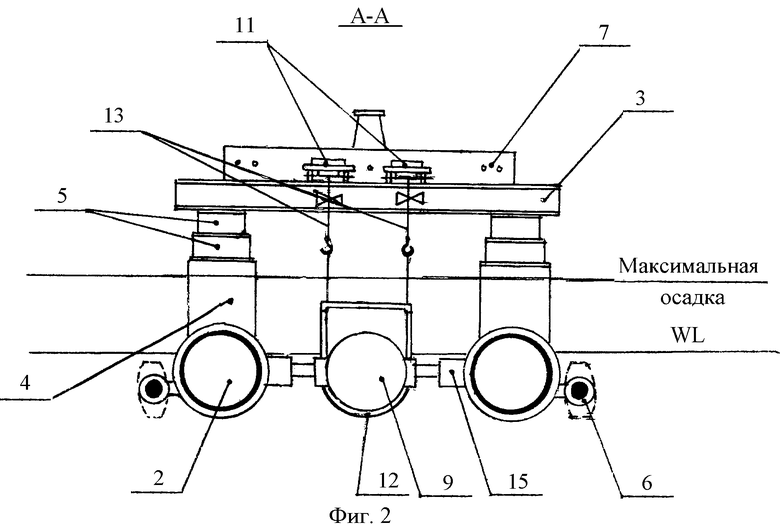
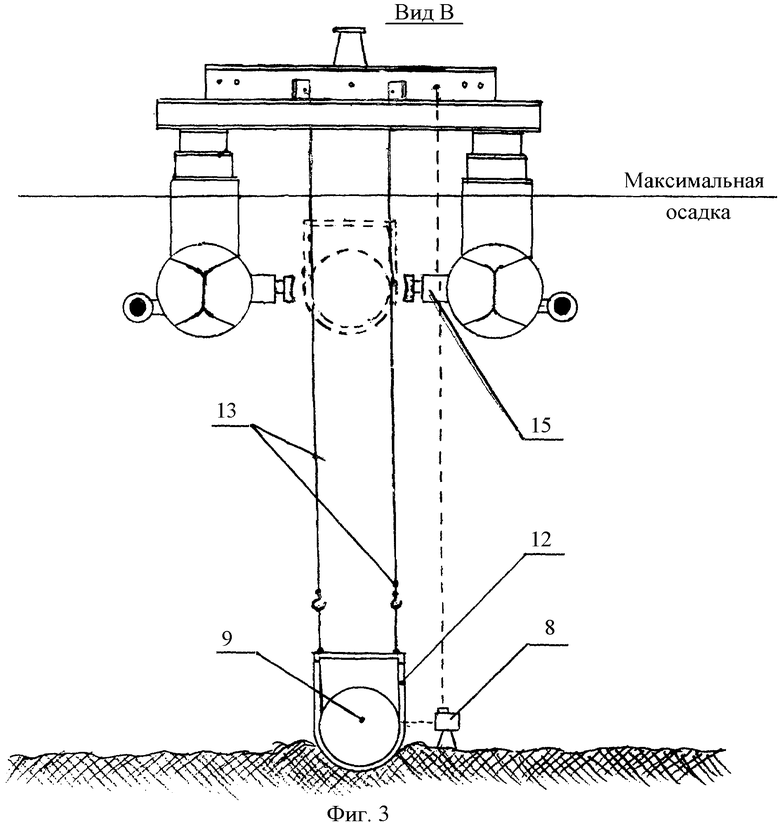
Сущность изобретения поясняется чертежами, где на фиг.1 представлен общий вид морского грузового судна с объектом, поднятым для транспортировки (вид сбоку), на фиг.2 - разрез по А-А, а на фиг.3 вид В - вид грузового судна с кормы в нос с расположенным на грунте затонувшим объектом.
Морское грузовое судно для подъема, погрузки-выгрузки и транспортировки затонувших объектов в пункт приема (фиг.1, 2 и 3) имеет два жестко соединенных между собой корпуса 1, выполненных в виде понтонов, герметично разделенных прочными переборками на отсеки 2. Корпуса 1 соединены с помощью опорной платформы 3, которая расположена не менее чем на четырех цилиндрических опорах 4, установленных на понтонах и выполненных в виде системы телескопических цилиндров 5, связанных трубопроводами с напорной гидросистемой (не показаны), установленной на судне. Телескопические цилиндры 5 выполнены с возможностью как их одновременного перемещения, так и взаимного перемещения порознь относительно друг друга.
Судно оборудовано движительно-рулевым комплексом 6, который может быть выполненным в виде погружных поворотных проточных гребных электродвижителей, энергетической установкой 7 и имеет балластную систему (не показана), содержащую в своем составе герметичные отсеки 2 понтонных корпусов 1 судна, снабженные кингстонами (не показаны).
Судно оснащено датчиком положения 8 объекта 9 относительно грунта (фиг.3), следящей системой (не показана), связанной с гидросистемой, с датчиком положения 8 объекта 9 (фиг.3), с кренометром и дифферентометром (не показаны) судна и с расположенным на опорной платформе 3 постом управления 10.
Пост управления 10 связан с гидросистемой телескопических цилиндров 5, с расположенным на опорной платформе 3 тросовым грузоподъемным оборудованием 11, с балластной системой, с движительно-рулевым комплексом 6 и с упомянутой следящей системой.
Тросовое грузоподъемное оборудование 11 имеет «полотенца» 12 для обхвата затопленного объекта 9 в нескольких сечениях по длине, связанных с ходовыми концами тросовой системы 13.
При этом гребные электродвижители движительно-рулевого корпуса 6 могут быть выполнены в виде движителей шнекового типа. В качестве корпусов 1 судна могут быть использованы прочные корпуса утилизируемых подводных лодок. Кроме того, часть герметичных отсеков 2 корпусов 1 судна может быть предназначена в качестве топливных цистерн 14 (фиг.1) энергетической установки 7.
На корпусах 1 судна имеются пневматические кранцы 15 для фиксации транспортируемого объекта 9 между ними.
Работа устройства осуществляется следующим образом.
В процессе подъема и погрузки затонувшего объекта 9 на судно заводят судно-катамаран к месту нахождения затонувшего объекта 9 и ориентируют его относительно объекта так, чтобы объект оказался между корпусами 1 судна. Судно принимает балласт до получения максимальной осадки. Под затонувший объект 9 заводят в несколько рядов по длине объекта так называемые «полотенца» 12, соединенные с тросовой системой 13 грузоподъемного оборудования 11. Устанавливают на грунт датчик положения 8 объекта 9. Подтягивают тросы 13, выбирая их слабину, обтягивая тем самым объект 9 «полотенцами» 12, и стопорят их. Затем откачивают балласт из герметичных отсеков 2 до создания подъемной силы, равной весу затонувшего объекта 9. После этого вводят в действие напорную гидравлическую систему опор 4. В результате телескопические цилиндры 5 начинают выдвигаться, создавая дополнительную подъемную силу для преодоления сил засасывания грунтом объекта 9. При этом давление в гидросистеме продолжают медленно повышать, контролируя положение объекта 9 на дне с помощью датчика положения 8. При поступлении сигнала от датчика 8 о начале страгивания вверх объекта 9 относительно грунта интенсивность повышения давления в опорах 4 уменьшают и продолжают его снижать по мере отрыва объекта 9 от грунта, обеспечивая плавный процесс отрыва от грунта. После окончательного отрыва объекта 9 от грунта работу гидросистемы прекращают и начинают дальнейшее откачивание балласта из герметичных отсеков 2 до полного всплытия судна.
Далее с помощью грузоподъемного оборудования 11 объект 9 поднимают до размещения его между корпусами 1 судна и фиксируют от перемещений в горизонтальной плоскости с помощью выдвижных пневматических кранцев 15. В этом положении объект 9 транспортируют в пункт приема, где его выгружают в соответствии с техническими условиями и возможностями пункта.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ НА СУДНЕ НЕГАБАРИТНОГО ТЯЖЕЛОВЕСНОГО ОБЪЕКТА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2180636C2 |
| СПОСОБ ПОГРУЗКИ-ВЫГРУЗКИ И ТРАНСПОРТИРОВКИ НА ПЛАВСРЕДСТВЕ РЕАКТОРНЫХ ОТСЕКОВ УТИЛИЗИРУЕМЫХ АТОМНЫХ ПОДВОДНЫХ ЛОДОК В ПУНКТ ДЛИТЕЛЬНОГО ПОДВОДНОГО ХРАНЕНИЯ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2174087C1 |
| СПОСОБ ПОГРУЗКИ И ДОСТАВКИ НА ПЛАВСРЕДСТВЕ ИЗ ДОК-КАМЕРЫ ОДНООТСЕЧНЫХ БЛОКОВ РЕАКТОРНЫХ ОТСЕКОВ УТИЛИЗИРОВАННЫХ АТОМНЫХ ПОДВОДНЫХ ЛОДОК К МОРСКОМУ ТРАНСПОРТНОМУ СРЕДСТВУ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2207287C2 |
| ВОЛНОСТОЙКАЯ МОРСКАЯ ГРУЗОПОДЪЁМНАЯ ПЛАТФОРМА (ВМГП) | 2014 |
|
RU2561491C1 |
| СПОСОБ ТРАНСПОРТИРОВКИ НА ПЛАВСРЕДСТВЕ ВЫВЕДЕННЫХ ИЗ СТРОЯ АТОМНЫХ ПОДВОДНЫХ ЛОДОК В ПУНКТ ИХ УТИЛИЗАЦИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2321532C1 |
| ПОДВОДНАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2010 |
|
RU2462388C2 |
| СУДОПОДЪЕМНИК-СПАСАТЕЛЬ | 2003 |
|
RU2261819C2 |
| МОРСКОЕ САМОХОДНОЕ САМОПОДЪЕМНОЕ КРАНОВОЕ СУДНО | 2015 |
|
RU2603423C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА | 1998 |
|
RU2200111C2 |
| УСТРОЙСТВО ПОГРУЗКИ, ТРАНСПОРТИРОВКИ И УСТАНОВКИ НА МОРСКОЕ ДНО ТЯЖЕЛОВЕСНОГО И КРУПНОГАБАРИТНОГО МОРСКОГО ПОДВОДНОГО ОБЪЕКТА | 2016 |
|
RU2630513C1 |
Изобретение относится к области водных перевозок тяжеловесных негабаритных грузов. Морское грузовое судно имеет два жестко соединенных между собой корпуса, тросовое грузоподъемное оборудование, балластную систему и пневматические кранцы, размещенные на корпусах судна. Корпуса судна выполнены в виде понтонов, герметично разделенных прочными переборками на отсеки и соединенных между собой с помощью опорной платформы. Платформа расположена не менее чем на четырех цилиндрических опорах, установленных на понтонах. Опоры выполнены в виде системы телескопических цилиндров, связанных трубопроводами с напорной гидравлической системой, которой оснащено судно. Опоры выполнены с возможностью как одновременного перемещения всех телескопических цилиндров, так и их перемещения порознь относительно друг друга. Балластная система содержит герметичные отсеки понтонов корпусов судна, снабженные кингстонами. Судно оборудовано движительно-рулевым комплексом, энергетической установкой, оснащено датчиком положения объекта относительно грунта, кренометром, дифферентометром, следящей системой и расположенным на опорной платформе постом управления. Повышается безопасность и надежность процесса подъема и погрузки затопленного негабаритного груза, а также обеспечивается отрыв груза от засосавшего его грунта. 5 з.п. ф-лы, 3 ил.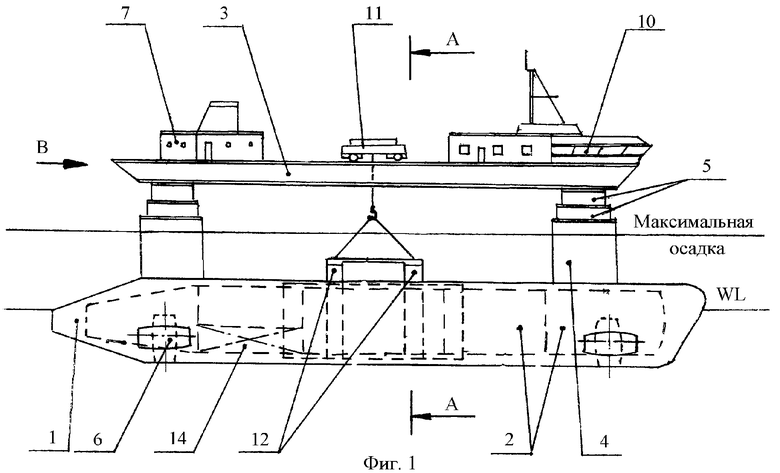
1. Морское грузовое судно для подъема, погрузки-выгрузки и транспортировки затонувших объектов в пункт приема, имеющее два жестко соединенных между собой корпуса, тросовое грузоподъемное оборудование, балластную систему и пневматические кранцы, размещенные на корпусах судна, отличающееся тем, что корпуса судна выполнены в виде понтонов, герметично разделенных прочными переборками на отсеки и соединенных между собой с помощью опорной платформы, расположенной не менее чем на четырех цилиндрических опорах, установленных на понтонах и выполненных в виде системы телескопических цилиндров, связанных трубопроводами с напорной гидравлической системой, которой оснащено судно, причем цилиндрические опоры выполнены с возможностью осуществления как одновременного перемещения всех телескопических цилиндров, так и их взаимного перемещения порознь относительно друг друга, а балластная система содержит в своем составе упомянутые герметичные отсеки понтонов корпусов судна, снабженные кингстонами, при этом судно оборудовано движительно-рулевым комплексом и энергетической установкой и оснащено датчиком положения объекта относительно грунта, кренометром, дифферентометром, следящей системой, связанной с одной стороны с гидросистемой, а с другой - с датчиком положения объекта, с кренометром и с дифферентометром, и расположенным на опорной платформе постом управления, связанным с гидросистемой телескопических цилиндров, с тросовым грузоподъемным оборудованием, с балластной системой, с движительно-рулевым комплексом и с упомянутой следящей системой.
2. Морское грузовое судно по п.1, отличающееся тем, что движительно-рулевой комплекс выполнен в виде погружных поворотных проточных гребных электродвижителей.
3. Морское грузовое судно по п.2, отличающееся тем, что гребные электродвижители выполнены в виде движителей шнекового типа.
4. Морское грузовое судно по п.1, отличающееся тем, что тросовое грузоподъемное оборудование включает «полотенца», связанные с ходовыми концами тросовой системы.
5. Морское грузовое судно по п.1, отличающееся тем, что корпуса судна представляют собой прочные корпуса утилизируемых подводных лодок.
6. Морское грузовое судно по п.1, отличающееся тем, что часть герметических отсеков корпусов судна выполнены в виде топливных цистерн энергетической установки.
| КОМПЛЕКС ПРЕИМУЩЕСТВЕННО ДЛЯ ПОДНЯТИЯ ЗАТОНУВШИХ ОБЪЕКТОВ | 2003 |
|
RU2240256C1 |
| СПОСОБ ПОДЪЕМА ЗАТОНУВШЕГО ОБЪЕКТА И КОМПЛЕКС ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2006 |
|
RU2312038C1 |
| Способ изготовления одежды | 1990 |
|
SU1715291A1 |
| НАКЛОННЫЙ ПОДЪЕМНИК ЯДЕРНОГО РЕАКТОРА | 2016 |
|
RU2614518C1 |
| Способ испытания эластичных трубопроводов на герметичность | 1987 |
|
SU1469373A1 |

