ОБЛАСТЬ ТЕХНИКИ
Настоящее изобретение относится к системе, способу и компьютерному программному продукту для генерации управляющего сигнала в вибрационном измерительном устройстве.
УРОВЕНЬ ТЕХНИКИ
Вибрационные измерительные устройства, такие как, например, денситометры (плотномеры) и расходомеры Кориолиса, используются для измерения параметров протекающих веществ, например плотности, удельного массового расхода, объемного расхода, суммарного массового расхода, температуры, и другой информации. Вибрационные измерительные устройства включают в себя один или несколько трубопроводов, которые могут иметь разнообразие форм, например прямую, U-образную, или могут иметь неправильную конфигурацию.
Один или несколько трубопроводов имеют набор собственных колебательных мод, включая в себя, например, простые изгибные, крутильные, радиальные и связанные моды. По меньшей мере, один привод заставляет вибрировать, или возбуждает, один или несколько трубопроводов на резонансной частоте на одной из этих возбуждаемых мод с целью определения параметра протекающего вещества. Одно или несколько электронных устройств передают синусоидальный, или прямоугольный управляющий сигнал на, по меньшей мере, один привод, который обычно представляет собой комбинацию магнита/катушки, причем магнит обычно прикрепляется к трубопроводу, а катушка прикрепляется к монтажной конструкции или к другому трубопроводу. Управляющий сигнал заставляет привод вибрировать один или несколько трубопроводов на частоте привода на приводной моде. Например, управляющий сигнал может быть периодическим электрическим током, подаваемым на катушку.
По меньшей мере, один датчик (чувствительный элемент) детектирует движение трубопровода(ов) и генерирует синусоидальный сигнал датчика, отображающий движение вибрирующего трубопровода(ов). Датчик обычно представляет собой комбинацию магнита/катушки, причем магнит обычно прикрепляется к одному трубопроводу, а катушка прикрепляется к монтажной конструкции или к другому трубопроводу. Сигнал датчика передается на одно или несколько электронных устройств; и, в соответствии с хорошо известными принципами, сигнал датчика может быть использован одним или несколькими электронными устройствами, чтобы определить параметр протекающего вещества или отрегулировать управляющий сигнал, в случае необходимости.
Для возбуждения вибрационного измерительного устройства на желаемой моде обычно используется приводная цепь. Приводная цепь модифицирует один или более сигналов датчика для генерации управляющего сигнала. Приводная цепь усиливает подходящую приводную частоту и подавляет другие приводные частоты. В качестве примера генерируемый управляющий сигнал может стартовать с сигналом датчика. Этот сигнал датчика затем может быть модифицирован, например, фильтрацией нежелательных мод, регулировкой усиления сигнала, и фазовым сдвигом, чтобы обеспечить генерируемый управляющий сигнал.
В зависимости от рабочих условий, данное вибрационное измерительное устройство может работать более точно на определенных частотах. Например, некоторые вибрационные измерительные устройства способны работать или на низкочастотной первой изгибной приводной моде или на высокочастотной второй изгибной приводной моде. Низкочастотная первая изгибная приводная мода может обеспечить лучшую работу при вовлеченном воздухе, а высокочастотная вторая изгибная приводная мода может обеспечить более точные измерения в более широком диапазоне рабочих условий.
В случаях, когда вибрационные измерительные устройства были разработаны для работы на множественных модах, практически было трудно переключаться между модами, поскольку единственная фиксированная приводная цепь не способна генерировать более чем одну моду. Это особенно проблематично, когда любые аналоговые аппаратные средства, в силу их неизменности, включены как компонента приводной цепи.
Настоящее изобретение направлено на преодоление этого недостатка, присущего предшествующим системам с единственным трубопроводом.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Объем притязаний настоящего изобретения определяется исключительно в соответствии с приложенной формулой, и ни в какой степени не зависит от изложенного в настоящем кратком описании.
В соответствии с одним вариантом реализации настоящего изобретения, система для генерации управляющего сигнала в вибрационном измерительном устройстве содержит, по меньшей мере, один трубопровод, по меньшей мере, один привод, по меньшей мере, один датчик и одно или несколько электронных устройств. По меньшей мере, один трубопровод сконфигурирован для приема протекающего вещества. По меньшей мере, один привод заставляет вибрировать, по меньшей мере, один трубопровод. По меньшей мере, один датчик измеряет движение, по меньшей мере, одного трубопровода. Одно или несколько электронных устройств включают в себя, по меньшей мере, две приводные цепи, причем каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика для генерации управляющего сигнала, используемого, чтобы заставить вибрировать, по меньшей мере, один трубопровод, и каждая приводная цепь генерирует отличающуюся моду вибрации в, по меньшей мере, одном трубопроводе. Одно или несколько электронных устройств включают в себя селектор приводной цепи для выбора приводной цепи из, по меньшей мере, двух приводных цепей. Одно или несколько электронных устройств выдают на привод управляющий сигнал, генерируемый выбранной приводной цепью.
В соответствии с вариантом реализации настоящего изобретения, способ для генерации управляющего сигнала для вибрационного измерительного устройства, которое включает в себя, по меньшей мере, один трубопровод, сконфигурированный для приема протекающего вещества, по меньшей мере, один привод, который заставляет вибрировать, по меньшей мере, один трубопровод и, по меньшей мере, один датчик, который измеряет движение, по меньшей мере, одного трубопровода, содержит этапы предоставления одного или нескольких электронных устройств с, по меньшей мере, двумя приводными цепями, причем каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика, чтобы сгенерировать управляющий сигнал, и каждая приводная цепь генерирует отличающуюся моду вибрации в, по меньшей мере, одном трубопроводе, выбора приводной цепи из, по меньшей мере, двух приводных цепей, и предоставление управляющего сигнала, сгенерированного выбранной приводной цепью, на привод.
В соответствии с другим вариантом реализации настоящего изобретения, предоставляется компьютерный программный продукт, который содержит используемую компьютером среду, включающую в себя исполняемый код для выполнения процесса генерации управляющего сигнала для вибрационного измерительного устройства (5), причем процесс содержит выбор приводной цепи из, по меньшей мере, двух приводных цепей, причем каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика для генерации управляющего сигнала, и каждая приводная цепь генерирует отличающуюся моду вибрации в, по меньшей мере, одном трубопроводе, и предоставление на привод управляющего сигнала, сгенерированного выбранной приводной цепью.
АСПЕКТЫ
В соответствии с одним аспектом настоящего изобретения, система для генерации управляющего сигнала в вибрационном измерительном устройстве содержит:
по меньшей мере, один трубопровод, сконфигурированный для приема протекающего вещества;
по меньшей мере, один привод, который заставляет вибрировать, по меньшей мере, один трубопровод;
по меньшей мере, один датчик, который измеряет движение, по меньшей мере, одного трубопровода;
одно или несколько электронных устройств, включающих в себя, по меньшей мере, две приводные цепи, причем:
каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика для генерации управляющего сигнала, используемого, чтобы заставить вибрировать, по меньшей мере, один трубопровод;
каждая приводная цепь генерирует отличающуюся моду вибрации в, по меньшей мере, одном трубопроводе;
одно или несколько электронных устройств включают в себя селектор приводной цепи для выбора приводной цепи из, по меньшей мере, двух приводных цепей; и
одно или несколько электронных устройств предоставляют на привод управляющий сигнал, генерируемый выбранной приводной цепью.
Предпочтительно, каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика таким образом, что усиливает конкретную приводную частоту и подавляет другие приводные частоты.
Предпочтительно, каждая приводная цепь включает в себя фильтр, который отфильтровывает нежелательные моды вибрации.
Предпочтительно, каждая приводная цепь включает в себя алгоритм сдвига фазы.
Предпочтительно, каждая приводная цепь включает в себя алгоритм регулировки усиления.
Предпочтительно, пользователь или программа выбирает приводную цепь.
Предпочтительно, приводная цепь выбирается в соответствии с тем, присутствует ли в протекающем веществе вовлеченный газ.
Предпочтительно, приводная цепь выбирается в соответствии с шумом сигналов датчика.
Предпочтительно, приводная цепь выбирается обращением к поисковой (справочной) таблице, которая коррелирует разнообразие условий с конкретными приводными цепями.
В соответствии с другим объектом настоящего изобретения, способ для генерации управляющего сигнала для вибрационного измерительного устройства, включающий в себя, по меньшей мере, один трубопровод, сконфигурированный для приема протекающего вещества, по меньшей мере, один привод, который заставляет вибрировать, по меньшей мере, один трубопровод, и, по меньшей мере, один датчик, который измеряет движение, по меньшей мере, одного трубопровода, содержит этапы:
предоставления одного или нескольких электронных устройств с, по меньшей мере, двумя приводными цепями, причем:
каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика для генерации управляющего сигнала;
каждая приводная цепь генерирует отличающуюся моду вибрации в, по меньшей мере, одном трубопроводе;
выбора приводной цепи из, по меньшей мере, двух приводных цепей; и
предоставления на привод управляющего сигнала, генерируемого выбранной приводной цепью.
Предпочтительно, каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика таким образом, что усиливает конкретную приводную частоту и подавляет другие приводные частоты.
Предпочтительно, каждая приводная цепь включает в себя фильтр, который отфильтровывает нежелательные моды вибрации.
Предпочтительно, каждая приводная цепь включает в себя алгоритм сдвига фазы.
Предпочтительно, каждая приводная цепь включает в себя алгоритм регулировки усиления.
Предпочтительно, пользователь или программа выбирает приводную цепь.
Предпочтительно, приводная цепь выбирается в соответствии с тем, присутствует ли в протекающем веществе вовлеченный газ.
Предпочтительно, приводная цепь выбирается в соответствии с шумом сигналов датчика.
Предпочтительно, приводная цепь выбирается, обращением к справочной таблице, которая коррелирует разнообразие условий с конкретными приводными цепями.
В соответствии с другим аспектом настоящего изобретения, компьютерный программный продукт, содержащий используемую компьютером среду, включающую в себя исполняемый код, чтобы выполнять процесс генерации управляющего сигнала для вибрационного измерительного устройства (5), причем процесс содержит:
выбор приводной цепи из, по меньшей мере, двух приводных цепей, причем:
каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика для генерации управляющего сигнала;
каждая приводная цепь генерирует отличающуюся моду вибрации в, по меньшей мере, одном трубопроводе; и
предоставление на привод управляющего сигнала, генерируемого выбранной приводной цепью.
Предпочтительно, каждая приводная цепь модифицирует, по меньшей мере, один сигнал датчика таким образом, что усиливает конкретную приводную частоту и подавляет другие приводные частоты.
Предпочтительно, каждая приводная цепь включает в себя фильтр, который отфильтровывает нежелательные моды вибрации.
Предпочтительно, каждая приводная цепь включает в себя алгоритм сдвига фазы.
Предпочтительно, каждая приводная цепь включает в себя алгоритм регулировки усиления.
Предпочтительно, пользователь или программа выбирает приводную цепь.
Предпочтительно, приводная цепь выбирается в соответствии с тем, присутствует ли в протекающем веществе вовлеченный газ.
Предпочтительно, приводная цепь выбирается в соответствии с шумом сигналов датчика.
Предпочтительно, приводная цепь выбирается, обращением к справочной таблице, которая коррелирует разнообразие условий с конкретными приводными цепями.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
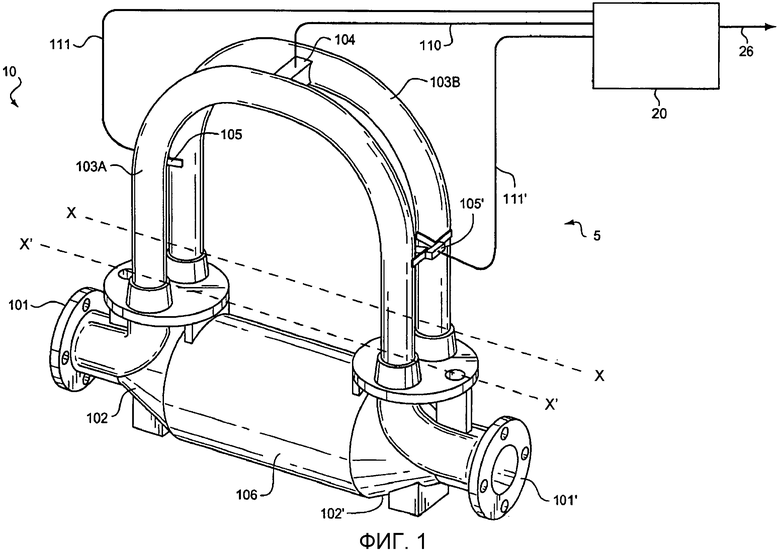
Фиг.1 изображает перспективный вид примера вибрационного измерительного устройства.
Фиг.2 - перспективный схематический вид системы привода, включающей в себя множественные приводные цепи.
ПОДРОБНОЕ ОПИСАНИЕ ПРЕДПОЧТИТЕЛЬНОГО В НАСТОЯЩЕЕ ВРЕМЯ ВАРИАНТА РЕАЛИЗАЦИИ
На Фиг.1 показан пример вибрационного измерительного устройства 5 в виде расходомера Кориолиса, содержащего сенсорную сборку 10 и одно или несколько электронных устройств 20. Одно или несколько электронных устройств 20 соединены с сенсорной сборкой 10 для измерения параметра протекающего вещества, например плотности, удельного массового расхода, объемного расхода, общего массового расхода, температуры и другой информации.
Сенсорная сборка 10 включает в себя пару фланцев 101 и 101', манифольды 102 и 102', и трубопроводы 103A и 103B. Манифольды 102, 102' закрепляются на противоположных концах трубопроводов 103A, 103B. Фланцы 101 и 101' настоящего примера прикрепляются к манифольдам 102 и 102'. Манифольды 102 и 102' настоящего примера присоединяются к противоположным концам разделителя 106. Разделитель 106 в настоящем примере поддерживает интервал между манифольдами 102 и 102', чтобы предотвратить нежелательные вибрации в трубопроводах 103A и 103B. Трубопроводы тянутся снаружи от манифольдов по существу параллельно друг другу. Когда сенсорная сборка 10 вставляется в магистральную трубопроводную систему (не показана), которая переносит протекающее вещество, вещество входит в сенсорную сборку 10 через фланец 101, проходит через входной манифольд 102, где общее количество вещества направляется на вход трубопроводов 103A и 103B, протекает через трубопроводы 103A и 103B, и назад в выходной манифольд 102', где оно выходит из сенсорной сборки 10 через фланец 101'.
Сенсорная сборка 10 настоящего примера включает в себя привод 104. Привод 104 присоединяется к трубопроводам 103A, 103B в том положении, где привод (возбудитель) 104 может заставить вибрировать трубопроводы 103A, 103B на приводной моде. Более конкретно, привод 104 включает в себя первый приводной участок (не показан), присоединенный к трубопроводу 103A, и второй приводной участок (не показан), присоединенный к трубопроводу 103B. Привод 104 может содержать одно из многих известных устройств, например первый участок с магнитом, установленным на трубопроводе 103A, и противостоящий второй участок с катушкой, установленной на трубопроводе 103B.
В настоящем примере приводная мода является первой не совпадающей по фазе изгибной модой, и трубопроводы, 103A и 103B предпочтительно выбираются и соответственно устанавливаются на входной манифольд 102 и выходной манифольд 102' так, чтобы обеспечить сбалансированную систему, имеющую по существу те же самые массовое распределение, моменты инерции и упругие модули, вокруг изгибных осей X--X и X'--X' соответственно. В настоящем примере, где приводная мода является первой не совпадающей по фазе изгибной модой, трубопроводы 103A и 103B управляются приводом 104 в противоположных направлениях вокруг их соответствующих изгибных осей X и X'. Управляющий сигнал в виде переменного тока предоставляется одним или несколькими электронными устройствами 20, например, через шину 110 разводки, и проходит через катушку, чтобы заставить колебаться оба трубопровода 103A, 103B.
Специалисты в данной области техники заметят, что в рамках настоящего изобретения могут быть использованы другие приводные моды. В качестве примера, приводной модой может быть крутильная мода, как описано в Патенте США No.5,271282, раскрытие которого, таким образом, включено здесь посредством ссылки.
Показанная сенсорная сборка 10 включает в себя пару датчиков 105, 105', которые присоединены к трубопроводам 103A, 103B. Более конкретно, участки первого датчика (не показаны) расположены на трубопроводе 103A, и участки второго датчика (не показаны) расположены на трубопроводе 103B. В изображенном варианте реализации, датчики 105, 105' расположены на противоположных концах трубопроводов 103A, 103B. Датчики 105, 105' могут быть электромагнитными детекторами, например магнитами, участка первого датчика и катушками, участка второго датчика, которые производят сигналы датчика, отображающие скорость и положение трубопроводов 103A, 103B. Например, датчики 105, 105' могут подавать сигналы датчика на одно или несколько электронных устройств через шины 111, 111' разводки. Специалистам в данной области техники должно быть ясно, что движение трубопроводов 103A, 103B пропорционально определенным характеристикам протекающего вещества, например массовому расходу и плотности материала, текущего через трубопроводы 103A, 103B.
В показанном на Фиг.1 примере одно или несколько электронных устройств 20 принимают сигналы датчиков от датчиков 105, 105'. Канал 26 предоставляет средство ввода и вывода, что позволяет одному или нескольким электронным устройствам 20 взаимодействовать с оператором. Одно или несколько электронных устройств 20 измеряют параметр протекающего вещества, например плотность, удельный массовый расход, объемный расход, общий массовый расход, температуру, и другую информацию. Более конкретно, одно или несколько электронных устройств 20 принимают один или несколько сигналов, например, от датчиков 105, 105' и одного или нескольких температурных датчиков (не показаны), и используют эту информацию, чтобы измерить параметр протекающего вещества, например плотность, удельный массовый расход, объемный расход, общий массовый расход, температуру, и другую информацию.
Методики, с помощью которых вибрационные измерительные устройства, например расходомеры Кориолиса или денситометры, измеряют параметры протекающего вещества, хорошо известны; см., например, Патент США No.6,505,131, раскрытие которого в данном случае включено посредством ссылки; поэтому подробное рассмотрение опущено для краткости настоящего описания.
В показанном на Фиг.1 примере, одно или несколько электронных устройств 20 предоставляют управляющий сигнал на привод 104. Более конкретно, приводная цепь, например приводные цепи C1, C2, C3, CN, показанные в варианте реализации на Фиг.2, модифицируют один или несколько сигналов датчиков таким образом, что усиливают соответствующую приводную частоту и подавляют другие приводные частоты. Например, приводная цепь C1 может модифицировать сигнал датчика фильтрацией нежелательных мод, то есть мод приводных цепей C2, C3, CN, регулируя усиление сигнала и фазовый сдвиг сигнала. После того как приводная цепь модифицирует один или несколько сигналов датчиков, соответствующий управляющий сигнал посылается на привод 105, чтобы заставить вибрировать трубопроводы 103, 103'.
Специалистам в данной области техники должно быть ясно, что приводные цепи настоящего варианта реализации могут быть реализованы в программном продукте, аппаратных средствах или их комбинации. Например, приводные цепи могут включать в себя аналоговые аппаратные средства в виде фильтров и программно выполняемых процессов, например один или несколько алгоритмов, которые сдвигают фазу сигнала и регулируют усиление сигнала.
На Фиг.2 показан вариант реализации системы 70 привода, которая способна выбирать различные приводные цепи. Как показано на Фиг.2, система 70 привода включает в себя множественные приводные цепи, например приводные цепи C1, C2, C3 и CN. В соответствии с одним аспектом настоящего варианта реализации, каждая приводная цепь, например приводные цепи C1, C2, C3, CN, сконфигурирована для генерации отличающейся приводной частоты или приводной моды. В соответствии с другим аспектом настоящего варианта реализации, каждая приводная цепь, например приводные цепи C1, C2, C3, CN, модифицирует один или несколько сигналов датчиков таким образом, что усиливают соответствующую приводную частоту данной приводной цепи. В соответствии с еще одним аспектом настоящего варианта реализации, каждая приводная цепь, например приводные цепи C1, C2, C3, CN, модифицирует один или несколько сигналов датчиков таким образом, что подавляет другие приводные частоты, включая другие приводные частоты других приводных цепей. В качестве примера, каждая приводная цепь C1, C2, C3, CN может быть снабжена, по меньшей мере, одним фильтром F1, F2, F3, FN, например, посредством алгоритма или аппаратных средств, по меньшей мере, одним алгоритмом сдвига фазы P1, P2, P3, PN, и, по меньшей мере, одним алгоритмом G1, G2, G3, GN регулировки усиления, которые соответствующим образом модифицируют один или несколько сигналов датчиков.
Специалистам в данной области техники должно быть ясно, что конкретные используемые алгоритмы будут зависеть от множества факторов. Кроме того, специалистам в данной области техники должно быть ясно, что на практике вибрационные измерительные устройства обычно не идентичны друг другу. Например, причем без ограничений, вибрационные измерительные устройства обычно различаются, по меньшей мере, до некоторой степени, значением их массы, распределением их массы, амплитудами вибрации и/или используемыми частотами, и конкретным веществом или плотностью конкретного вещества, которое протекает через трубопровод. Специалистам в данной области техники должно быть ясно, что даже малые различия в массе, распределении массы, амплитудах вибраций и/или частотах, и в конкретном веществе или плотности конкретного вещества, которое протекает через трубопровод, будет влиять на конкретные приводные цепи и используемые алгоритмы. Соответственно, специалистам в данной области техники должно быть ясно, что может потребоваться определенное контрольное испытание, чтобы определить соответствующие приводные цепи или алгоритмы для конкретного вибрационного измерительного устройства.
Как показано на Фиг.2, система 70 привода включает в себя селектор 75 приводной цепи. В соответствии с одним объектом настоящего варианта реализации, селектор 75 приводной цепи сконфигурирован так, чтобы позволить выбор соответствующей приводной цепи, например приводных цепей C1, C2, C3, CN. Специалистам в данной области техники должно быть ясно, что селектор 75 настоящего варианта реализации может быть воплощен в программном продукте, аппаратных средствах или их комбинации. В качестве примера, селектор 75 приводной цепи может быть аппаратным переключателем, и/или может быть процессом выполняемым программным обеспечением, например процессом, который пользователь или программа выбирает или вводит, как в блоке 76, желаемую используемую приводную цепь C1, C2, C3, CN.
Соответственно, в ситуациях, когда конкретная приводная цепь не подходит, пользователь или программа могут переключиться на более подходящую приводную цепь. Например, конкретная приводная цепь может обеспечить более точные измерения в ситуациях, когда присутствует вовлеченный газ. В качестве еще одного примера, конкретная приводная цепь может сгенерировать сигналы датчиков, имеющие меньший шум, то есть такие, которые возникают на частоте, отличающейся от других частот, которые возникают в системе. И в качестве еще одного примера, программа или пользователь могут обратиться к справочной таблице, которая коррелирует разнообразие условий с конкретными приводными цепями.
Специалистам в данной области техники должно быть очевидно, что в рамках настоящего изобретения предполагается использование рассматриваемых здесь принципов совместно с любым типом вибрационных измерительных устройств, включая, например, денситометры (плотномеры), независимо от числа приводов, числа датчиков, рабочей колебательной моды, или определяемого параметра протекающего вещества. В настоящем описании рассматриваются определенные примеры, чтобы показать специалистам в данной области техники то, как осуществить и использовать наилучший вариант изобретения. Для демонстрации принципов изобретения, некоторые обычные объекты были упрощены или опущены. Специалистам в данной области техники должны быть понятны возможные вариации этих примеров, которые находятся в пределах объема притязаний изобретения. Подробные описания вышеупомянутых вариантов реализации не являются исчерпывающими описаниями всех вариантов реализации, рассматриваемых изобретателями как находящиеся в пределах объема притязаний изобретения.
Специалистам в данной области техники должно быть ясно, что определенные элементы вышеописанных вариантов реализации могут быть по-разному объединены или устранены, чтобы создать дополнительные варианты реализации, и такие дополнительные варианты реализации находятся в пределах объема притязаний изобретения и рассмотрения в рамках изобретения. Также, специалистам в данной области техники должно быть очевидно, что вышеописанные варианты реализации могут быть объединены полностью или частично, чтобы создать дополнительные варианты реализации в пределах объема притязаний изобретения и рассмотрения в рамках изобретения.
Таким образом, хотя определенные варианты реализации и примеры изобретения описаны здесь в иллюстративных целях, различные эквивалентные модификации возможны в пределах объема притязаний изобретения, как должно быть видно специалистам в данной области техники. Предоставленная здесь информация может быть применена к другим вариантам реализации, отличающимся от описанных выше и показанных в сопровождающих чертежах. Соответственно, объем притязаний изобретения определяется нижеследующей формулой.
Предложенное изобретение относится к средствам для генерации управляющего сигнала для вибрационного измерительного устройства. Система для генерации приводного сигнала в вибрационном измерительном устройстве, входящая в состав кориолисова расходомера, содержит по меньшей мере, один трубопровод (103A), по меньшей мере, один привод (104), по меньшей мере, один датчик (105), одно или несколько электронных устройств (20), сконфигурированных для приема сигналов от датчиков и включающих в себя, по меньшей мере, две доступные приводные цепи (C1, C2, C3, CN). Каждая приводная цепь модифицирует сигнал датчиков для генерации приводного сигнала, включающего в себя отличающуюся частоту и приводную моду вибрации в одном трубопроводе (103А). При этом электронные устройства (20) включают в себя селектор (75) приводной цепи, предназначенный для выбора приводной цепи для обработки сигналов датчиков с выбранной приводной цепью для генерирования приводного сигнала и для предоставления приводного сигнала на соответствующий привод (104). Каждая приводная цепь (C1, C2, C3, CN) модифицирует сигналы датчиков таким образом, что усиливает конкретную приводную частоту и подавляет другие приводные частоты. Указанная система реализует соответствующий способ генерации приводного сигнала. Данное изобретение позволяет оптимизировать работу кориолисова расходомера для различных условий работы, обусловленных разными физическими параметрами контролируемой текучей среды. 2 н. и 14 з.п. ф-лы, 2 ил.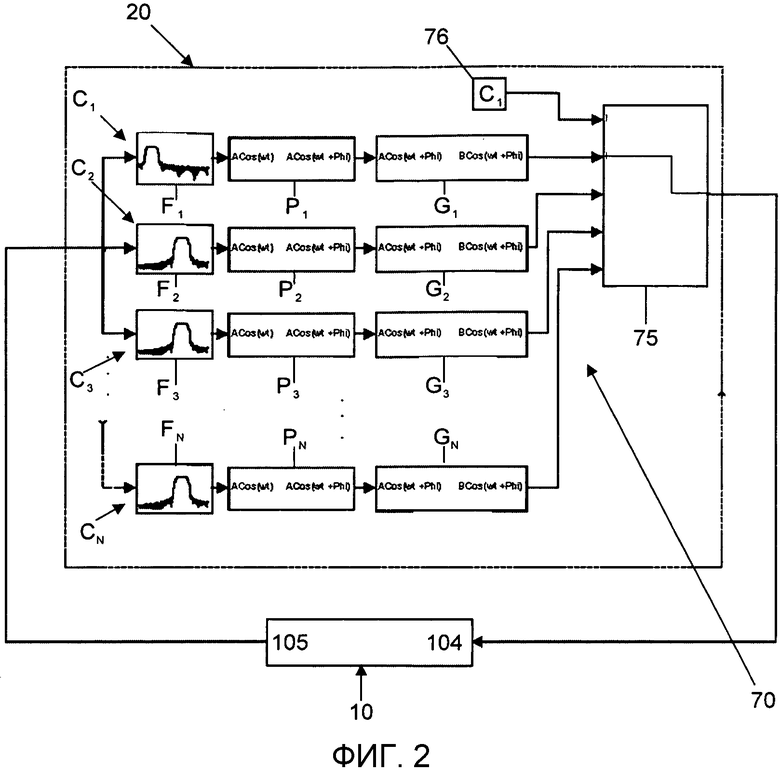
1. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5), содержащая:
по меньшей мере, один трубопровод (103A), сконфигурированный для приема протекающего вещества;
по меньшей мере, один привод (104), который заставляет вибрировать, по меньшей мере, один трубопровод (103A);
по меньшей мере, один датчик (105), который измеряет движение, по меньшей мере, одного трубопровода (103A);
одно или несколько электронных устройств (20), сконфигурированных для приема, по меньшей мере, одного сигнала датчика, по меньшей мере, от одного датчика (105), причем одно или несколько электронных устройств (20) включает в себя, по меньшей мере, две доступные приводные цепи (C1, C2, C3, CN), причем:
каждая приводная цепь, по меньшей мере, из двух доступных приводных цепей (C1, C2, C3, CN) модифицирует сигнал датчика для генерации приводного сигнала, включающего в себя отличающуюся частоту и приводную моду вибрации, по меньшей мере, в одном трубопроводе (103А), и;
причем одно или несколько электронных устройств (20), включающих в себя селектор (75) приводной цепи, сконфигурировано для выбора приводной цепи, по меньшей мере, из двух доступных приводных цепей (C1, C2, C3, CN), для обработки, по меньшей мере, одного сигнала датчика с выбранной приводной цепью для генерирования приводного сигнала и для предоставления приводного сигнала, по меньшей мере, на один привод (104),
причем каждая приводная цепь (C1, C2, C3, CN) модифицирует, по меньшей мере, один сигнал датчика таким образом, что усиливает конкретную приводную частоту и подавляет другие приводные частоты.
2. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой каждая приводная цепь (C1, C2, C3, CN) включает в себя фильтр, который отфильтровывает нежелательные моды вибрации.
3. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой каждая приводная цепь (C1, C2, C3, CN) включает в себя алгоритм сдвига фазы (P1, P2, P3, PN).
4. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой каждая приводная цепь (C1, C2, C3, CN) включает в себя алгоритм регулировки усиления (G1, G2, G3, GN).
5. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой пользователь или программа выбирает приводную цепь (C1, C2, C3, CN).
6. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой приводная цепь (C1, C2, C3, CN) выбирается в соответствии с тем, присутствует ли в протекающем веществе вовлеченный газ.
7. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой приводная цепь (C1, C2, C3, CN) выбирается в соответствии с шумом сигналов датчика.
8. Система для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.1, в которой приводная цепь (C1, C2, C3, CN) выбирается с помощью доступа к поисковой таблице, которая коррелирует разнообразие условий с конкретными приводными цепями (C1, C2, C3, CN).
9. Способ для генерации приводного сигнала для вибрационного измерительного устройства (5), включающий в себя, по меньшей мере, один трубопровод (103A), сконфигурированный для приема протекающего вещества, по меньшей мере, один привод (104), который заставляет вибрировать, по меньшей мере, один трубопровод (103A), по меньшей мере, один датчик (105), который измеряет движение, по меньшей мере, одного трубопровода (103A), причем способ содержит этапы:
выбора приводной цепи посредством селектора (75) приводной цепи из, по меньшей мере, двух доступных приводных цепей (C1, C2, C3, CN), причем каждая приводная цепь, по меньшей мере, из двух доступных приводных цепей (C1, C2, C3, CN) модифицирует сигнал датчика для генерации приводного сигнала, включающего в себя отличающуюся частоту и приводную моду вибрации, по меньшей мере, в одном трубопроводе (103A),
приема, по меньшей мере, одного сигнала датчика, по меньшей мере, от одного датчика (105),
обработки, по меньшей мере, одного сигнала датчика с выбранной приводной цепью для генерирования приводного сигнала,
предоставление приводного сигнала, по меньшей мере, на один привод (104), причем
каждая приводная цепь (C1, C2, C3, CN) модифицирует, по меньшей мере, один сигнал датчика таким образом, что усиливает конкретную приводную частоту и подавляет другие приводные частоты.
10. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором каждая приводная цепь (C1, C2, C3, CN) включает в себя фильтр, который отфильтровывает нежелательные моды вибрации.
11. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором каждая приводная цепь (C1, C2, C3, CN) включает в себя алгоритм сдвига фазы (P1, P2, P3, PN).
12. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором каждая приводная цепь (C1, C2, C3, CN) включает в себя алгоритм регулировки усиления (G1, G2, G3, GN).
13. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором пользователь или программа выбирает приводную цепь (C1, C2, C3, CN).
14. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором приводная цепь (C1, C2, C3, CN) выбирается в соответствии с тем, присутствует ли в протекающем веществе вовлеченный газ.
15. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором приводная цепь (C1, C2, C3, CN) выбирается в соответствии с шумом сигналов датчика.
16. Способ для генерации приводного сигнала в вибрационном измерительном устройстве (5) в соответствии с п.9, в котором приводная цепь (C1, C2, C3, CN) выбирается с помощью доступа к поисковой таблице, которая коррелирует разнообразие условий конкретными приводными цепями (C1, C2, C3, CN).
| Устройство энергоснабжения транс-пОРТНОгО СРЕдСТВА | 1979 |
|
SU816807A1 |

