Трубопроводы для перемещения природного газа, нефти и других газов и текучих сред могут монтироваться внутри туннелей, через заболоченные земли, по береговым линиям и другим окружающим средам с ограниченной доступностью для сооружения трубопровода. В зависимости от места, может быть необходимым, чтобы такие трубопроводы проходили на многие километры через такие окружающие среды. Например, трубопроводы в туннеле под большим городом могут иметь длины в восемь или более километров.
Для сооружения такого трубопровода в туннеле, туннель может быть пробурен с помощью буровой туннелепроходческой машины (БТМ). Как только туннель пробурен (или когда туннель пробуривается), один или более трубопроводов могут прокладываться в туннель. Трубопроводы, проложенные в таких туннелях, типично выполнены из множества сегментов трубопровода, которые приварены друг к другу для образования по существу прямого участка трубопровода.
К сожалению, условия окружающей среды в туннеле часто препятствуют эффективной работе сварщиков и других строительных команд, устанавливающих трубопровод. Условия окружающей среды, связанные с заболоченными землями и подступами к береговой линии, также препятствуют эффективной работе, связанной с установкой трубопровода. Таким образом, существует потребность в усовершенствовании существующих систем для установки трубопроводов.
СУЩНОСТЬ ИЗОБРЕТЕНИЯ
Нижеследующее представляет собой краткое изложение сущности предмета изобретения, который описывается более подробно здесь. Это краткое изложение сущности изобретения не подразумевается быть ограничивающим относительно объема формулы изобретения.
Здесь описаны различные технологии, относящиеся к установке трубопроводов. Иллюстративная система может соответствовать системе для прокладки трубопровода. Такая система может включать в себя устройство для прокладки, которое включает в себя раму, подвижное зажимное устройство в скользящем сцеплении с рамой, и по меньшей мере один привод. Система также может включать в себя по меньшей мере один контроллер, содержащий один или более компьютеров, процессоров и/или других электрических составных частей, которые функционально выполнены для приведения в действие устройства для прокладки так, чтобы перемещать трубопровод и чтобы осуществлять мониторинг работы системы.
Указанный по меньшей мере один контроллер функционально выполнен для побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство между первым положением и вторым положением вдоль рамы. Также указанный по меньшей мере один контроллер функционально выполнен для побуждения подвижного зажимного устройства переходить между первым состоянием и вторым состоянием. В первом состоянии подвижное зажимное устройство выполнено с возможностью зажатия (т.е., жесткого сцепления и захватывания) по меньшей мере одного участка трубопровода, размещенного посредством устройства для прокладки труб, и предотвращения относительного перемещения между подвижным зажимным устройством и трубопроводом. Во втором состоянии подвижное зажимное устройство выполнено с возможностью освобождения указанного по меньшей мере одного участка трубопровода и обеспечения возможности относительного перемещения между подвижным зажимным устройством и трубопроводом.
Данная описанная система также может включать в себя множество корпусных сегментов. Каждый корпусной сегмент может быть выполнен из бетона или другого материала и может включать в себя по меньшей мере одно отверстие через него для размещения участков трубопровода. Также система может включать в себя множество поддерживающих рам. Каждая поддерживающая рама включает в себя канал через нее с по меньшей мере одной опорой, смонтированной в нем, для размещения участков трубопровода в функционально скользящем соединении с указанной по меньшей мере одной опорой.
В данном описанном варианте осуществления поддерживающие рамы соответствующим образом располагаются между концами отверстий соседних корпусных сегментов таким образом, что отверстия корпусных сегментов и каналы поддерживающих рам выровнены для размещения трубопровода, проходящего по существу по прямой линии через последовательность многих пар соседних корпусных сегментов и поддерживающих рам.
Во время работы системы указанный по меньшей мере один контроллер функционально выполнен для побуждения подвижного зажимного устройства переходить в первое состояние для зажатия указанного по меньшей мере одного участка трубопровода и для побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство из первого положения во второе положение для перемещения участков трубопровода в по меньшей мере одно отверстие по меньшей мере одного из корпусных сегментов и по меньшей мере один канал по меньшей мере одной из поддерживающих рам. Также указанный по меньшей мере один контроллер функционально выполнен для побуждения подвижного зажимного устройства переходить во второе состояние и для побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство в обратном направлении из второго положения в первое положение без перемещения трубопровода относительно корпусных сегментов и поддерживающих рам.
В данном описанном варианте осуществления указанный по меньшей мере один контроллер функционально выполнен для приведения в действие устройства для прокладки для множества циклов прокладки для постепенного проталкивания трубопровода через отверстия множества корпусных сегментов. Такие корпусные сегменты могут иметь длины для обеспечения расположения достаточного количества поддерживающих рам между концами соседних корпусных сегментов для поддерживания перемещения трубопровода на расстояние нескольких километров через отверстия корпусных сегментов без прогибания трубопровода и без (или по меньшей мере с минимальным) контакта между внешними поверхностями трубопровода и внутренними поверхностями отверстий корпусных сегментов.
При установке нового трубопровода, после одной или более прокладок участков трубопровода (посредством подвижного зажимного устройства, перемещающегося один или более раз из первого положения во второе положение), один или более дополнительных сегментов трубопровода могут привариваться к участку (т.е., внешнему концу) трубопровода, который проходит снаружи корпусных сегментов. Как только трубопровод был удлинен таким образом, устройство для прокладки может снова приводиться в действие для перемещения подвижного зажимного устройства один или более раз для прокладки большей части трубопровода в отверстия корпусных сегментов. Этот процесс может повторяться так много циклов прокладки, как необходимо для прокладки требуемой длины трубопровода в туннель.
Также следует понимать, что в описанном варианте осуществления указанный по меньшей мере один контроллер может быть функционально выполнен для приведения в действие устройства для прокладки для удаления трубопровода из корпусных сегментов. Это может выполняться посредством подвижного зажимного устройства, перемещающегося один или более раз из второго положения в первое положение для вытягивания трубопровода наружу из отверстий корпусных сегментов. Один или более сегментов удаленного трубопровода могут отрезаться от трубопровода. Как только трубопровод был укорочен таким образом, устройство для прокладки может снова приводиться в действие для перемещения подвижного зажимного устройства один или более раз для вытягивания дополнительных участков трубопровода из отверстий корпусных сегментов. Этот процесс может повторяться так много циклов извлечения, как необходимо для удаления и разборки трубопровода.
Другие аспекты будут понятными после прочтения и понимания приложенных фигур и описания.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
Фиг. 1 представляет собой принципиальную схему иллюстративной системы для прокладки трубопровода.
Фиг. 2 представляет собой перспективный вид иллюстративного варианта выполнения устройства для прокладки.
Фиг. 3 представляет собой перспективный вид иллюстративного подвижного зажимного устройства для прокладки.
Фиг. 4 представляет собой вид сверху спереди иллюстративного подвижного зажимного устройства.
Фиг. 5 представляет собой перспективный вид иллюстративного расположения корпусных сегментов и поддерживающих рам.
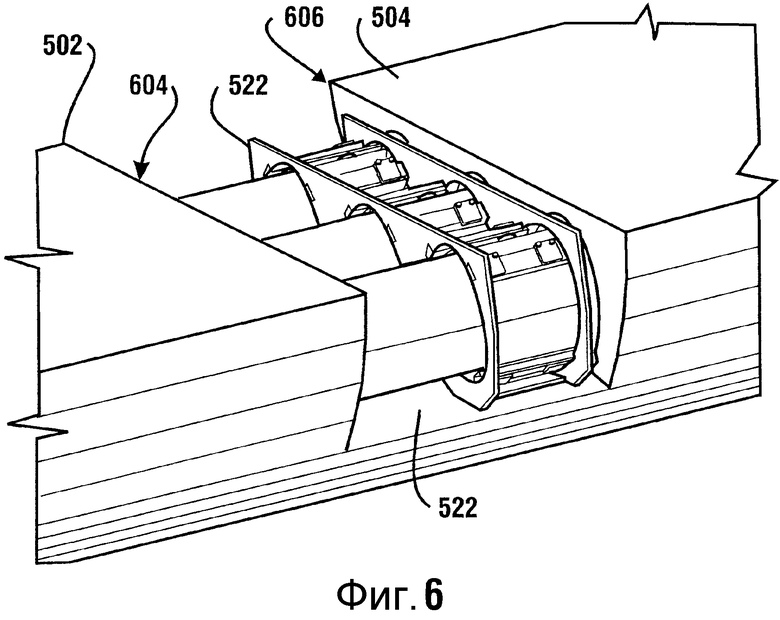
Фиг. 6 представляет собой перспективный вид иллюстративной поддерживающей рамы, смонтированной между концами соседних корпусных сегментов.
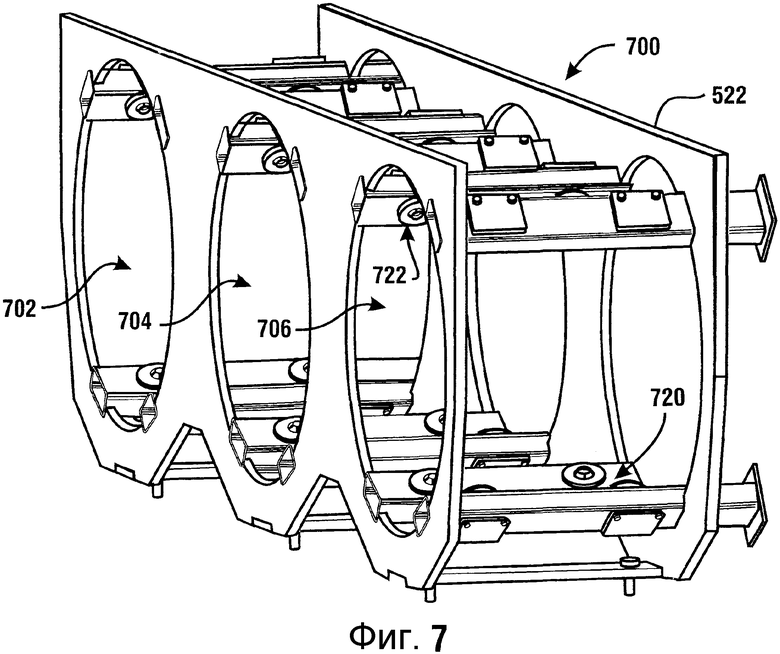
Фиг. 7 представляет собой перспективный вид иллюстративной поддерживающей рамы без трубопроводов и корпусных сегментов.
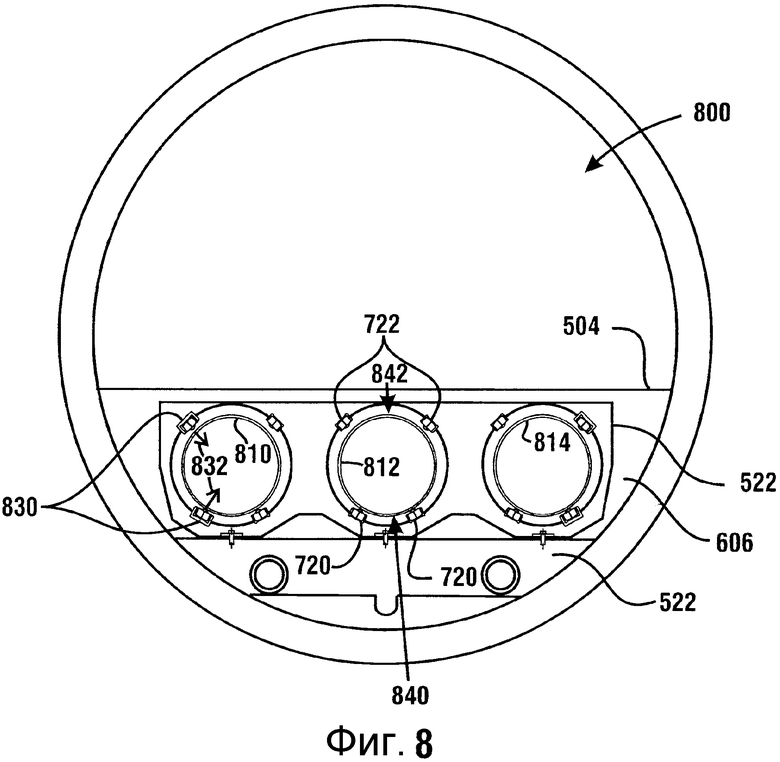
Фиг. 8 представляет собой вид сверху спереди иллюстративной поддерживающей рамы, смонтированной в туннеле.
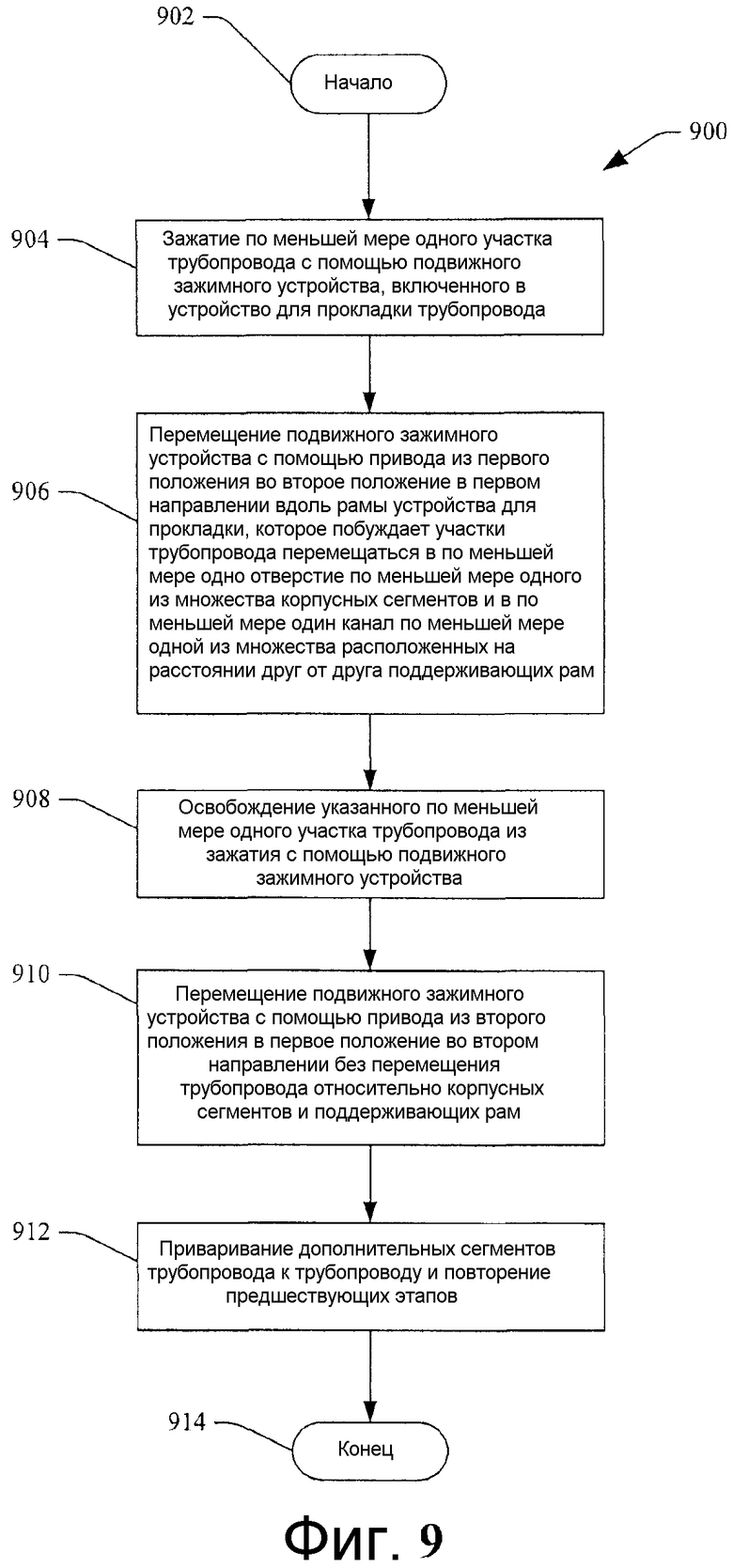
ФИГ. 9 представляет собой блок-схему, которая показывает иллюстративную методику приведения в действие устройства для прокладки трубопровода для прокладки трубопровода.
ФИГ. 10 представляет собой блок-схему, которая показывает иллюстративную методику приведения в действие устройства для прокладки трубопровода для извлечения трубопровода.
ПОДРОБНОЕ ОПИСАНИЕ
Различные технологии, относящиеся к прокладке трубопровода, теперь будут описываться со ссылкой на чертежи, где аналогичные ссылочные позиции представляют собой аналогичные элементы везде. Кроме того, некоторые функциональные блок-схемы иллюстративных систем показаны и описаны здесь с целью объяснения; однако следует понимать, что функция, которая описывается как выполняющаяся определенными составными частями системы и устройствами, может осуществляться множеством составных частей и устройств. Аналогичным образом, например, составная часть/устройство может быть выполнено с возможностью осуществления функции, которая описывается как выполняющаяся множеством составных частей/устройств.
Со ссылкой на Фиг. 1, показана иллюстративная система 100 для прокладки трубопровода, которая облегчает перемещение трубопровода на несколько километров. В иллюстративном варианте выполнения система 100 включает в себя устройство 102 для прокладки. Как объясняется более подробно ниже, это описанное устройство для прокладки является приводимым в действие для перемещения трубопровода в основном по прямой линии в и из туннеля или другого места (например, заболоченные земли, береговая линия). Такой трубопровод может соответствовать, например, трубопроводу с внешним диаметром 30 дюймов, стальной трубой API-5L-X70 с толщиной стенки 0,500 дюйма. Однако следует понимать, что в альтернативных вариантах выполнения могут использоваться другие размеры трубопроводов.
Иллюстративная система может включать в себя по меньшей мере один контроллер 126, который выполнен с возможностью управления одним или более элементами устройства для прокладки. Такой контроллер может соответствовать одному или более процессорам и связанным электрическим составным частям, которые функционально предназначены для побуждения элементов устройства для прокладки приводиться в действие. Например, система может включать в себя контроллер в виде компьютера с по меньшей мере одним процессором 160 в нем. Компьютер может включать в себя программное обеспечение 166, которое функционально предназначено для управления аппаратными средствами в устройстве для прокладки (например, электродвигателями, насосами, клапанами и т.д.). В другом примере контроллер может включать в себя процессор, такой как программируемый логический контроллер с микропрограммным обеспечением, предназначенным для приведения в действие аппаратных средств в устройстве для прокладки.
В иллюстративных вариантах осуществления контроллер также может быть выполнен с возможностью для принятия сигналов от датчиков 128 (например, преобразователей), смонтированных на составных частях аппаратных средств устройства для прокладки. Как объясняется более подробно ниже, контроллер может реагировать на такие сигналы датчиков для управления тем, каким образом аппаратные средства в устройстве для прокладки приводятся в действие. Контроллер также может быть выполнен с возможностью передачи информации касательно работы аппаратных средств и сигналов от датчиков на одно или более локальных и/или удаленных устройств 162 вывода (например, дисплейный экран, визуальные/звуковые сигналы), для обеспечения возможности пользователям осуществлять мониторинг за устройством для прокладки. Более того, контроллер может находиться в функциональном соединении с одним или более устройствами 164 ввода (например, сенсорный экран, клавиатура, мышка), посредством которых пользователь может обеспечивать входные данные, которые управляют тем, каким образом контроллер приводит в действие устройство для прокладки.
В иллюстративном варианте осуществления устройство 102 для прокладки включает в себя раму 104. Подвижное зажимное устройство 106 смонтировано в скользящем сцеплении с рамой. По меньшей мере один контроллер функционально выполнен с возможностью (например, запрограммирован) побуждения подвижного зажимного устройства переходить между первым состоянием, в котором подвижное зажимное устройство зажимает участок трубопровода в жестком сцеплении с ним, и вторым состоянием, в котором подвижные зажимные устройства освобождают участок трубопровода из жесткого сцепления с подвижным зажимным устройством.
Когда подвижное зажимное устройство находится в первом состоянии, прикладываемые усилия зажатия работают для предотвращения перемещения трубопровода относительно подвижного зажимного устройства. Также следует понимать, что контроллер может быть выполнен с возможностью изменения величины усилий зажатия, прикладываемых посредством зажимного устройства, в зависимости от диаметра, веса и текущей длины трубопровода, и величины усилия, необходимого для перемещения трубопровода. Таким образом, как используется здесь, первое состояние соответствует состоянию, когда подвижное зажимное устройство функционально обеспечивает достаточные усилия зажатия для обеспечения возможности перемещения трубопровода без проскальзывания трубопровода относительно зажимного устройства.
В иллюстративных вариантах осуществления подвижное зажимное устройство может включать в себя множество гидравлических цилиндров, которые приводятся в действие для побуждения подвижных участков 190 (например, подушек) подвижного зажимного устройства перемещаться для того, чтобы жестко зажать трубопровод. Гидравлические насосы и клапаны, использующиеся для приведения в действие гидравлического цилиндра, могут управляться посредством описанного контроллера.
Кроме того, описанное устройство для прокладки может включать в себя один или более приводов 114, таких как гидравлические двигатели. Контроллер может быть функционально предназначен для побуждения приводов перемещать подвижное зажимное устройство между первым положением 108 и вторым положением 110 на раме. Как объясняется более подробно ниже, в иллюстративных вариантах осуществления, устройство для прокладки может включать в себя узлы зубчатой рейки и шестерни, которые позволяют приводу перемещать подвижное зажимное устройство вдоль рамы. Однако следует понимать, что в альтернативных вариантах осуществления могут использоваться другие типы зубчатых передач или другие механические узлы, которые являются способными перемещать подвижное зажимное устройство (и трубопровод, зажатый там) относительно рамы.
Как показано на Фиг. 1, описанная система может использоваться для прокладки трубопровода в выбуренном подземном туннеле 130 или другом применении трубопровода. Такой туннель может быть выполнен посредством бурильной машины. При выполнении туннеля или после того, как туннель выполнен, множество корпусных сегментов 122 трубопровода могут монтироваться внутрь туннеля. Каждый из таких корпусных сегментов может включать в себя по меньшей мере одно отверстие 124 (т.е., полый проход) через него. Однако в типичном примере сегменты могут включать в себя три или более отверстий через них. Также следует понимать, что термин "отверстие", как используется здесь относительно корпусных сегментов, не требует, чтобы это отверстие было образовано посредством процесса сверления. Скорее отверстие задается там в виде полого прохода, который может быть образован, используя любой применимый процесс, включая сверление и/или посредством форм, пресс-форм или других технологий литья, когда выполняются корпусные сегменты.
В иллюстративных вариантах осуществления корпусные сегменты могут соответствовать предварительно отлитым бетонным сегментам, которые транспортируются в туннель и могут монтироваться последовательно таким образом, что соответствующие отверстия в каждом корпусном сегменте соосно выровнены с соответствующими отверстиями в каждом соседнем корпусном сегменте. В альтернативных вариантах осуществления корпусные сегменты могут быть образованы внутри туннеля посредством обеспечения бетона в соответствующие формы.
Кроме того, следует понимать, что в некоторых вариантах осуществления отверстия могут включать в себя внутренние стенки, образованные из бетона, из которого изготовлен корпусной сегмент. Однако в альтернативных вариантах осуществления стенки отверстий корпусных сегментов могут соответствовать трубам, выполненным из других материалов (например, стальные трубы), которые заделаны в бетонное тело корпусного сегмента.
Как только корпусные сегменты смонтированы в туннеле, отверстия корпусных сегментов обеспечивают прямой проход, через который прямой участок трубопровода может быть проложен. Также в окружающей среде, такой как туннель, описанные корпусные сегменты могут соответствовать сегментам пола. Например, верхние поверхности корпусных сегментов могут быть по существу плоскими и таким образом могут соответствовать участку дороги, который является способным обеспечивать перемещение людей и/или транспортных средств через туннель по сегментам пола и трубопроводам, содержащимся там. Однако следует понимать, что в альтернативных вариантах осуществления корпусные сегменты трубопровода могут не включать в себя верхнюю поверхность, которая может служить в качестве дороги для транспортного средства.
Как показано на Фиг. 1, описанная система может дополнительно включать в себя множество поддерживающих рам 116. Каждая поддерживающая рама может включать в себя канал 118 через нее с по меньшей мере одной опорой 120, смонтированной в нем, для размещения участков трубопровода в функционально скользящем соединении с по меньшей мере одной опорой 120. Поддерживающие рамы могут соответствующим образом располагаться в туннеле между отверстиями соседних корпусных сегментов таким образом, что отверстия корпусных сегментов и каналы поддерживающих рам выровнены для размещения трубопровода, проходящего по существу по прямой линии через них. В этом описанном варианте осуществления опоры 120 поддерживающих рам расположены таким образом, чтобы полностью или по меньшей мере по существу поддерживать участок трубопровода так, чтобы предотвратить (или по меньшей мере уменьшить до минимума) скольжение участков трубопровода относительно внутренней поверхности отверстий корпусных сегментов.
Как показано на Фиг. 1, корпусные сегменты могут быть выполнены (например, отлиты) таким образом, чтобы включать в себя основание 170, на которое могут монтироваться поддерживающие рамы. Такие основания 170 могут быть обеспечены с достаточной высотой относительно отверстий 124, и такие поддерживающие рамы могут быть выполнены с подходящими размерами, таким образом, что размещение поддерживающих рам на основаниях может приводить по существу к выравниванию каналов 118 поддерживающих рам с отверстиями 124 сегментов (с незначительными регулировками по положениям).
В этом отношении следует понимать, что подходящее геодезическое снаряжение (например, лазеры), регулировочные прокладки и другие выравнивающие инструменты и устройства могут использоваться для точного размещения каналов поддерживающих рам с требуемой величиной выравнивания с отверстиями корпусных сегментов так, чтобы находиться в пределах допусков, необходимых для конкретного применения трубопровода. Также следует понимать, что корпусные сегменты могут надлежащим образом измеряться и выравниваться для размещения их соответствующих отверстий в осевом выравнивании в туннеле.
Также следует понимать, что формы отверстий и каналов, описанных здесь, могут не быть цилиндрическими. Таким образом, как используется здесь, существенное выравнивание отверстий и каналов соответствует выравниванию, которое является достаточным для обеспечения по меньшей мере одного прохода через описанные отверстия и каналы, причем проход приспособлен размещать по существу прямой цилиндрический трубопровод через него.
В иллюстративных вариантах выполнения описанной системы устройство 102 для прокладки также размещено и выровнено для надлежащего направления участков трубопровода в (и/или из) отверстия и каналы корпусных сегментов и поддерживающих рам. В иллюстративном варианте выполнения устройство для прокладки может включать в себя выравнивающие устройства 172, которые выполнены с возможностью выборочного горизонтального и вертикального поднятия/опускания участков описанной рамы для осевого размещения и выравнивания проемов через подвижное зажимное устройство 106 с отверстиями 124 корпусных сегментов 122, смонтированных в туннеле 130.
Как только устройство для прокладки надлежащим образом размещено, сегменты трубопровода могут монтироваться в подвижное зажимное устройство. Контроллер 126 затем может приводиться в действие для побуждения подвижного зажимного устройства переходить в первое состояние (которое зажимает трубопровод) и для побуждения по меньшей мере одного привода перемещать подвижное зажимное устройство из первого положения 108 во второе положение 110 для начала процесса перемещения участков трубопровода в отверстия корпусных сегментов и каналы поддерживающих рам.
После перемещения подвижного зажимного устройства во второе положение контроллер функционирует для побуждения подвижного зажимного устройства переходить во второе состояние (которое освобождает трубопровод) и для побуждения по меньшей мере одного привода перемещать подвижное зажимное устройство из второго положения обратно в первое положение без перемещения (или по меньшей мере по существу без перемещения) трубопровода относительно корпусных сегментов и поддерживающих рам.
Как используется здесь, процесс проталкивания трубопровода вперед посредством перемещения подвижного зажимного устройства из первого положения во второе положение (в первом направлении), за которым следует перемещение подвижного зажимного устройства (но не трубопровода) обратно в первое положение (во втором направлении, противоположном первому направлению), называется здесь циклом прокладки. После одного или более циклов прокладки один или более дополнительных сегментов 180 трубопровода могут привариваться к концу трубопровода 112, и затем устройства для прокладки могут приводиться в действие снова (для одного или более циклов прокладки) для перемещения удлиненного трубопровода дальше в корпусные сегменты. Периодическая работа устройства для прокладки и приваривание дополнительных сегментов трубопровода могут продолжаться до тех пор, пока требуемый участок трубопровода не переместится через требуемое количество корпусных сегментов и поддерживающих рам.
Как может быть понятным, этот описанный процесс может выполняться в обратном направлении для извлечения трубопровода из корпусных сегментов. Как используется здесь, процесс вытягивания трубопровода наружу посредством перемещения подвижного зажимного устройства (в первом зажатом состоянии во втором направлении) из второго положения в первое положение, за которым следует перемещение (в первом направлении) подвижного зажимного устройства (но не трубопровода) (во втором освобожденном состоянии) обратно во второе положение, называется здесь циклом извлечения. После одного или более циклов извлечения один или более сегментов 180 трубопровода могут отрезаться от конца трубопровода 112, и затем устройства для прокладки могут приводиться в действие снова (для одного или более циклов извлечения) для перемещения укороченного трубопровода дальше из корпусных сегментов. Периодическая работа устройства для прокладки и отрезание сегментов трубопровода могут продолжаться до тех пор, пока требуемый участок трубопровода не удалится из корпусных сегментов и поддерживающих рам.
В иллюстративном варианте осуществления, для предотвращения перемещения трубопровода (когда подвижное зажимное устройство находится во втором освобожденном состоянии и перемещается между первым и вторым положениями) устройство для вставки может включать в себя дополнительное стационарное зажимное устройство 150 для удерживания трубопровода на месте, когда подвижное зажимное устройство возвращается в другое положение. Контроллер 126 может функционировать для побуждения стационарного зажимного устройства 150 переходить в первое состояние (т.е., зажатое состояние) для жесткого удерживания трубопровода на месте на раме, когда подвижное зажимное устройство 106 возвращается в его применимое начальное положение для другого цикла прокладки (или извлечения). Также до перемещения трубопровода подвижным зажимным устройством 106 (либо в качестве цикла прокладки, либо извлечения) контроллер 126 функционирует для побуждения стационарного зажимного устройства 150 переходить во второе состояние (т.е., освобожденное состояние) для обеспечения возможности перемещения трубопровода относительно стационарного зажимного устройства 150, когда он проталкивается (или вытягивается) посредством подвижного зажимного устройства.
Теперь со ссылкой на Фиг. 2 показан перспективный вид иллюстративного варианта осуществления устройства 200 для прокладки. На Фиг. 2 показаны примеры ранее описанных составных частей аппаратных средств, которые могут быть включены в устройство для прокладки. Такие аппаратные средства могут включать в себя подвижное зажимное устройство 202, которое смонтировано в скользящем соединении с рамой 204 устройства для прокладки. Здесь подвижное зажимное устройство может включать в себя каретку 206, которая находится в скользящем сцеплении (например, посредством множества роликов и/или подшипников 232) с рельсами 208, 210, включенными в раму 204 устройства для прокладки.
Для перемещения подвижного зажимного устройства 202 относительно рамы каретка 206 может включать в себя приводы в виде нескольких двигателей 212, таких как гидравлические двигатели. Гидравлические двигатели могут быть ориентированы на вращение соответствующих шестерен (312, показанных на Фиг. 3) рядом с зубчатой рейкой 214, смонтированной между рельсами 208, 210. Ранее описанный контроллер может функционировать для управления гидравлическим давлением от гидравлического насоса для выборочного побуждения гидравлических двигателей перемещать каретку 206 вдоль рамы 204.
На Фиг. 2 также показан пример стационарного зажимного устройства 230, которое смонтировано в жестком сцеплении с рамой 204. Кроме того, на Фиг. 2 показаны примеры выравнивающих устройств, которые являются применимыми для выборочного размещения и выравнивания устройства для прокладки. Здесь выравнивающие устройства могут включать в себя гидравлические тележки 216 и 218 для выборочного перемещения устройства для прокладки в поперечном направлении. Также выравнивающие устройства могут включать в себя гидравлические подъемники 220, 222, содержащие вертикально ориентированные гидравлические цилиндры 224, для выборочного перемещения устройства для прокладки в вертикальном направлении.
При начальном размещении устройства 200 для прокладки на бетонной подушке или другом фундаменте по меньшей мере один контроллер может приводиться в действие для побуждения тележек 216, 218 перемещать устройство для прокладки в поперечном направлении для горизонтального выравнивания проемов подвижного зажимного устройства и отверстий корпусных сегментов. Затем по меньшей мере один контроллер может функционировать для выборочного и индивидуального побуждения гидравлических цилиндров 224 поднимать или опускать каждую сторону каждого гидравлического подъемника 220, 222 устройства для прокладки для вертикального выравнивания и ориентации проемов в подвижном зажимном устройстве 202 с отверстиями корпусных сегментов.
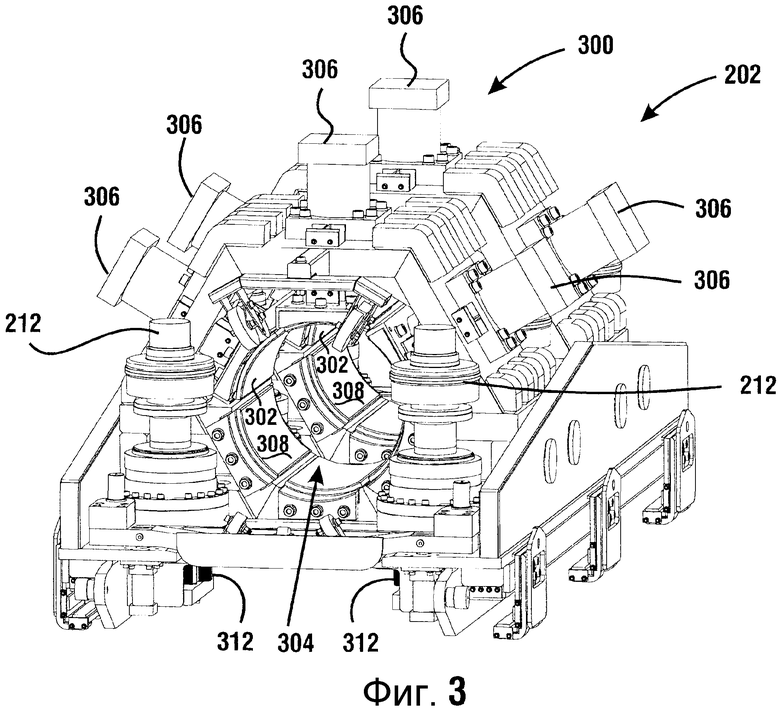
Теперь со ссылкой на Фиг. 3, показан перспективный вид 300 ранее описанного подвижного зажимного устройства 202. На Фиг. 3 показаны гидравлические двигатели 212, которые выполнены с возможностью вращения соответствующих шестерен 312 (вдоль зубчатой рейки 214, показанной на Фиг. 2).
Также, как показано в этом примере, подвижное зажимное устройство 202 может включать в себя множество подвижных участков 302, которые размещены вокруг по меньшей мере участка проема 304 в подвижном зажимном устройстве, который размещает трубопровод. Такие подвижные участки 302 могут соответствовать заменяемым прикрепленным фрикционным колодкам (также называемым здесь подушками).
Также, как показано на Фиг. 3, описанные подвижные участки 302 могут в основном монтироваться с возможностью перемещаться внутрь для контакта с верхней половиной (т.е., верхними 180 градусами) цилиндрической поверхности трубопровода. Нижняя половина трубопровода (т.е., нижние 180 градусов) может поддерживаться посредством стационарных участков 308 подвижного зажимного устройства. Такие стационарные участки также могут включать в себя заменяемые прикрепленные фрикционные колодки/подушки в равной степени.
В этом описанном варианте осуществления подвижные участки 302 могут перемещаться посредством соответствующих гидравлических цилиндров 306. Такие гидравлические цилиндры 306 могут выборочно приводиться в действие посредством контроллера для управления величиной усилий зажатия, прикладываемых к трубопроводу посредством подвижных участков 302. Гидравлические цилиндры 306 могут быть выполнены с возможностью перемещения каждого соответствующего подвижного участка 302 радиально внутрь по направлению к соответствующему стационарному участку 308 (на противоположной стороне трубопровода) для зажатия трубопровода в ранее описанном первом состоянии подвижного зажимного устройства. Подвижные участки 302 также могут перемещаться радиально наружу в ранее описанное второе состояние подвижного зажимного устройства для снятия усилий зажатия, действующих на трубопровод. Кроме того, следует понимать, что подвижное зажимное устройство может включать в себя множество рядов соответствующих подвижных/стационарных участков, причем ряды размещены для зажатия разных участков трубопровода в продольном направлении.
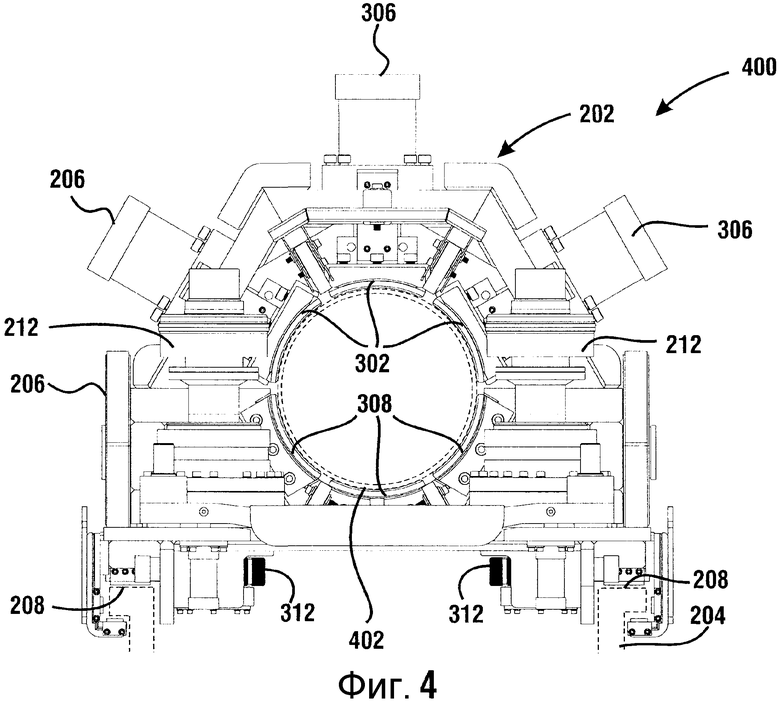
Теперь со ссылкой на Фиг. 4, показан вид 400 сверху спереди ранее описанного подвижного зажимного устройства 202 с участком трубопровода 402, зажатым в нем между подвижными 302 и стационарными 308 участками (например, колодками, подушками). На Фиг. 4 также показан пример способа, которым каретка 206 подвижного зажимного устройства может монтироваться в скользящем сцеплении с рамой 204 устройства для прокладки.
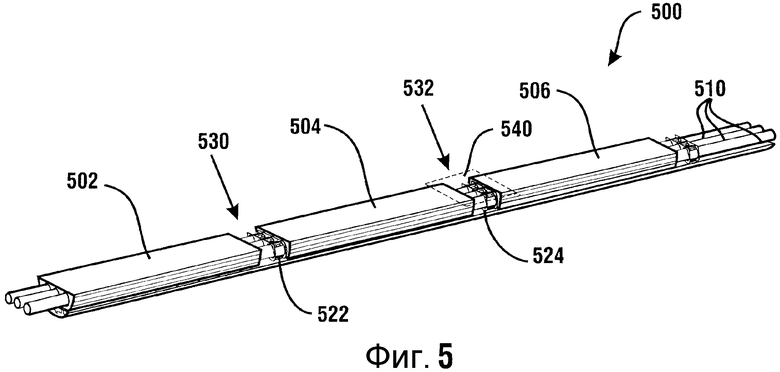
Как обсуждалось ранее, описанная система для прокладки трубопровода может включать в себя множество корпусных сегментов, которые монтируются торец к торцу в туннеле. На Фиг. 5 показано иллюстративное расположение 500 корпусных сегментов 502, 504, 506 с тремя трубопроводами 510, проложенными через них. На Фиг. 5 также показаны примеры поддерживающих рам 522, 524, смонтированных между концами корпусных сегментов. Как показано на этом виде, поддерживающие рамы могут быть расположены в промежутках 530, 532 от проемов до отверстий в соседних корпусных сегментах. Чтобы позволить верхней поверхности корпусных сегментов служить в качестве дороги, стальные плиты или другие плоские элементы 540 могут размещаться на этих промежутках для закрывания поддерживающих рам.
На Фиг. 6 показан увеличенный перспективный вид 600 поддерживающей рамы 522, которая размещена между противоположно обращенными концами 604, 606 соседних корпусных сегментов 504, 502. Как обсуждалось ранее, корпусные сегменты могут включать в себя основание 522, которое выполнено так, чтобы служить в качестве фундамента для поддерживающей рамы 602. На Фиг. 6 также показано, что поддерживающая рама может быть выполнена для поддерживания множества трубопроводов (например, трех или другого количества трубопроводов) с взаимным расположением рядом друг с другом.
В иллюстративных вариантах осуществления корпусные сегменты могут соответствовать отдельно отлитым узлам, которые монтируются в туннель с взаимным расположением торец к торцу. Однако также следует понимать, что один или более корпусных сегментов могут быть образованы в виде одного целого друг с другом как часть общего и непрерывного узла, а не как отдельные составные части. В таких случаях, термин корпусной сегмент относится к каждому соответствующему участку нераздельного узла, который включает в себя одно или более отверстий через него с соответствующими концами отверстий, которые открываются для монтажа поддерживающей рамы рядом с ними. Также в этом описанном варианте осуществления, основания 612, которые служат в качестве фундамента для поддерживающих рам, могут соответствовать участку непрерывного узла, который нераздельно включает в себя соседние пары корпусных сегментов.
Теперь со ссылкой на Фиг. 7, показан перспективный вид 700 поддерживающей рамы 522 без трубопровода и корпусных сегментов. Здесь показана поддерживающая рама, включающая в себя три канала 702, 704, 706, через которые могут прокладываться трубопроводы. В этом примере каждый канал включает в себя восемь опор, из которых четыре опоры 720 размещены для поддерживания нижнего участка трубопровода и из которых четыре опоры 722 размещены для направления верхнего участка трубопровода.
В этом описанном варианте осуществления опоры 720, 722, смонтированные в каждом канале, соответствуют роликам, относящимся к типу с шариковым перемещением. Такие опоры могут включать в себя несущий нагрузку сферический шарик, смонтированный внутри корпуса, причем шарик поддерживается посредством меньших шариковых опор. Однако следует понимать, что в альтернативных вариантах осуществления могут использоваться другие типы и/или количества опор (например, контурные роликовые опоры), которые выполнены с возможностью поддерживания и/или направления трубопровода через канал в поддерживающей раме.
На Фиг. 8 показан поперечный разрез туннеля 800, показывающий способ, которым поддерживающая рама 522 может монтироваться на основание 522 корпусного сегмента рядом с концом 606 корпусного сегмента 504, через который три трубопровода 810, 812, 814 проходят через него и через соответствующие отверстия поддерживающей рамы. Как показано на Фиг. 8, опоры 830 в каждом канале могут быть смонтированы таким образом, что направления 832, нормальные к проходящим наиболее внутри поверхностям их соответствующих роликовых элементов (т.е., верхняя часть сферического шарика), ориентированы по существу радиально относительно соседних внешних поверхностей (и/или центральной продольной оси) трубопровода 810, 812, 814, который предназначен для использования с поддерживающей рамой. Однако следует понимать, что в альтернативных вариантах осуществления с одними и теми же или разными типами опор опоры могут монтироваться в разных положениях и ориентациях.
Обычно рамные поддерживающие элементы выполнены для предотвращения контактирования трубопроводов с внутренними поверхностями отверстий корпусных сегментов. Однако сила тяжести и погрешности выравнивания новых сегментов трубопровода могут привести к трубопроводу, который провисает или сгибается вверх на небольшую величину таким образом, что царапает участки внутренних стенок отверстий корпусных сегментов. В иллюстративных вариантах осуществления самые нижние участки 840 и самые верхние участки 842 поверхностей трубопровода могут испытывать самый большой износ в связи с этим, который приводит к негладким поверхностям в этих областях. Для уменьшения до минимума износа, такие негладкие поверхности трубопровода могут сталкиваться с опорами, при этом опоры могут монтироваться в местах поддерживающей рамы, которые смещены в осевом направлении от этих ожидаемых зон износа.
Таким образом, как показано на Фиг. 8, в иллюстративном варианте осуществления, нижние опоры 720 в каждом канале могут монтироваться ниже участков нижней половины трубопровода (для размещения поддерживающим образом трубопровода) в местах, которые смещены от самого нижнего участка 840 внешней поверхности трубопровода. Аналогичным образом, верхние опоры 722 в каждом канале могут монтироваться выше участков верхней половины трубопровода в местах, которые смещены от самого верхнего участка 842 внешней поверхности трубопровода. Однако следует понимать, что в альтернативных вариантах осуществления опоры могут быть расположены в других местах по внутренней части каналов, исходя из характеристик нагружения конкретного применения прокладки трубопровода, которое предусматривается.
Кроме того, нижние опоры 720 и верхние опоры 722 в каждом канале могут монтироваться в положениях таким образом, что не все из опор в канале являются способными контактировать с поверхностями трубопровода одновременно. Таким образом, когда трубопровод 812 находится в контакте с нижними опорами 720, будет иметь место промежуток между верхними опорами 722 и поверхностями трубопровода. Аналогичным образом, если трубопровод включает в себя участок, который сгибается вверх в канале поддерживающей рамы для контактирования с верхними опорами 722, будет иметь место промежуток между нижними опорами и поверхностями трубопровода.
В иллюстративных системах величина усилия, требуемого устройством для прокладки для проталкивания трубопровода через отверстия корпусных сегментов, будет увеличиваться по мере удлинения трубопровода. Для уменьшения до минимума скорости увеличения величины усилия, которое является необходимым для проталкивания трубопровода, длины корпусных сегментов и, таким образом, расстояния между поддерживающими рамами могут укорачиваться в местах, находящихся дальше в туннеле, по сравнению с местами, находящимися ближе к устройству для прокладки. Например, длины корпусных сегментов рядом с входом в туннель около устройства для прокладки могут составлять порядка десяти метров, тогда как длины корпусных сегментов в четыре километра в туннеле могут составлять порядка восьми метров, и тогда как длины корпусных сегментов в восемь километров в туннеле могут составлять порядка шести метров. Таким образом, в этом описанном расположении, чем дальше трубопровод проталкивается в туннель, тем будет иметь место увеличение количества опор, использующихся для поддерживания заданной длины трубопровода на переднем конце трубопровода (по сравнению с задним концом). В качестве альтернативы, в другом варианте осуществления может иметь место увеличение количества опор, использующихся для поддерживания заданной длины трубопровода на заднем конце трубопровода, по сравнению с передним концом. Также в иллюстративных вариантах осуществления длины корпусных сегментов могут быть по существу одинаковыми для участков и/или всей длины требуемого трубопровода.
Кроме того, для уменьшения до минимума вероятности того, что передний край трубопровода застрянет в поддерживающей раме или корпусном сегменте вследствие провисания передней части трубопровода, передний край трубопровода может включать в себя округленную или коническую заглушку. Такая заглушка может способствовать направлению переднего края трубопровода в канал поддерживающей рамы или открыванию в отверстие корпусного сегмента.
Как обсуждалось ранее, описанная иллюстративная система для прокладки трубопровода может включать в себя множество разных датчиков на устройстве для прокладки. Датчики также могут монтироваться рядом с одной или более поддерживающими рамами. Описанный контроллер может быть функционально выполнен для использования информации, полученной такими датчиками, для регулирования того, каким образом контроллер приводит в действие устройство для прокладки и для обеспечения оператору (или другой стороне) информации о работе системы.
Например, каждый ряд подвижных участков (например, колодок/подушек) подвижного зажимного устройства может быть связан с соответствующим датчиком давления, который выполнен с возможностью измерения величины давления, прикладываемого к соседним поверхностям трубопровода соответствующим подвижным участком. Такие датчики давления могут соответствовать преобразователям, которые соответствующим образом монтируются в соответствующие гидравлические контуры для каждого гидравлического цилиндра, который используется для перемещения колодок/подушек рядом с поверхностью трубопровода.
Также устройство для прокладки может включать в себя датчик перемещения, выполненный с возможностью детектирования относительного перемещения (т.е., проскальзывания) между подвижным зажимным устройством и трубопроводом. Кроме того, устройство для прокладки может включать в себя датчик осевой силы, который выполнен с возможностью измерения величины силы сопротивления, которая испытывается приводами (например, гидравлическими двигателями), при перемещении трубопровода с помощью подвижного зажимного устройства. Такой датчик осевой силы может соответствовать преобразователю, который монтируется в гидравлические контуры для одного или более описанных гидравлических двигателей, которые перемещают подвижное зажимное устройство. Кроме того, следует понимать, что альтернативные варианты осуществления могут включать в себя другие типы датчиков (например, механические, оптические, электронные), которые выполняют соответствующие измерения давлений, сил и перемещений, описанных здесь, или какие-либо другие эксплуатационные характеристики системы.
В иллюстративном варианте осуществления контроллер может функционально реагировать на детектирование проскальзывания для побуждения подвижного зажимного устройства обеспечивать большее усилие захватывания вокруг трубопровода до тех пор, пока проскальзывание трубопровода не прекратится. Такое дополнительное усилие захватывания может быть достигнуто посредством побуждения одного или более гидравлических цилиндров направлять большее давление, действующее на разные участки поверхности трубопровода. Контроллер может осуществлять мониторинг результирующего давления, обнаруженного датчиком давления, для каждого гидравлического цилиндра для того, чтобы регулировать каждый гидравлический цилиндр таким образом, что обеспечивается то, что одинаковая величина давления прикладывается к трубопроводу.
Кроме того, контроллер может осуществлять мониторинг датчиков давления для определения того, что величина прикладываемого усилия захватывания остается ниже заданного максимального порогового значения. Контроллер также может быть выполнен с возможностью побуждения устройства вывода выдавать сигнал оповещения или сообщение, соответствующее детектированию проскальзывания посредством датчика перемещения и/или детектированию посредством датчика осевой силы величины силы, необходимой приводам для перемещения трубопровода, которая приближается (или превосходит) к заданному максимальному пороговому значению.
Такой сигнал оповещения может указывать, что трубопровод испытывает неравномерное увеличение сопротивления проталкиванию через отверстия. Для преодоления такого сопротивления контроллер может быть функционально выполнен таким образом, чтобы вручную получать указания посредством ввода через устройство ввода, для побуждения величины усилия захватывания, подлежащего прикладыванию с помощью подвижного зажимного устройства, которое превышает заданное максимальное пороговое значение. В других случаях контроллер может быть функционально выполнен таким образом, чтобы вручную получать указания посредством ввода через устройство ввода, для побуждения устройства для прокладки работать для частичного вытягивания трубопровода в обратном направлении (наружу), и затем снова начинать проталкивать трубопровод вперед, чтобы попытаться переместить трубопровод за положение, которое вызывает увеличенную величину сопротивления.
Также в других случаях, для преодоления такого сопротивления, контроллер может быть функционально выполнен таким образом, чтобы регулировать скорость перемещения подвижного зажимного устройства относительно рамы устройства для прокладки. Например, для некоторых ситуаций контроллер может побуждать приводы перемещать подвижное зажимное устройство быстрее для проталкивания трубопровода за положение, которое вызывает сопротивление. В других ситуациях контроллер может побуждать приводы перемещать подвижное зажимное устройство медленнее до тех пор, пока датчики осевой силы не обнаружат, что силы сопротивления уменьшились.
Иллюстративные варианты осуществления также могут включать в себя другие типы датчиков или устройств мониторинга. Например, могут использоваться датчики, которые осуществляют мониторинг величины износа на колодках/подушках подвижного и/или стационарного зажимного устройства. Также иллюстративные варианты осуществления могут включать в себя множество видеокамер, размещенных для осуществления мониторинга разных эксплуатационных аспектов системы. Например, система может включать в себя видеокамеру, которая размещена для осуществления мониторинга устройства для прокладки, а также видеокамеры, приводимые в действие для осуществления мониторинга одного или более рамных поддерживающих элементов.
Вся или часть информации, собранной с видеокамер, датчиков, и эксплуатационные данные, связанные с контроллером и описанной системой, могут быть обеспечены через устройства вывода, локально рядом с системой (например, в рабочей кабине/трейлере) или удалено от системы (например, рабочая станция, соединенная с системой посредством сети, например, Интернета). Также такая информация может собираться в одно или более хранилищ данных для использования с анализированием эксплуатационных характеристик системы.
Как описано ранее, дополнительные сегменты трубопровода привариваются к концу трубопровода, чтобы удлинить трубопровод рядом с устройством для прокладки. В иллюстративном варианте осуществления такой дополнительный сегмент трубопровода может поддерживаться посредством подвижных поддерживающих элементов, имеющих ролики и/или подъемный механизм, которые обеспечивают возможность перемещения нового сегмента трубопровода в надлежащее выравнивание для приваривания. Такие дополнительные сегменты трубопровода также могут испытываться до приведения в действие устройства для прокладки для перемещения вновь добавленных сегментов трубопровода в отверстия корпусных сегментов.
Теперь со ссылкой на Фиг. 9, иллюстративная методика показана и описана связанной с работой ранее описанной иллюстративной системы для прокладки трубопровода для прокладки трубопровода в отверстия корпусных сегментов в туннеле. Хотя методика описана в виде ряда действий, которые выполняются последовательно, следует понимать, что методика не ограничена порядком последовательности. Например, некоторые действия могут осуществляться в другом порядке, нежели чем описан здесь. Кроме того, действие может осуществляться одновременно с другим действием. Более того, в некоторых случаях, не все действия могут требоваться для осуществления методики, описанной здесь.
Кроме того, некоторые действия, описанные здесь, могут побуждаться посредством выполняемых компьютером команд, которые могут осуществляться одним или более процессорами и/или храниться на невременном машиночитаемом носителе или носителях. Выполняемые компьютером команды могут включать в себя алгоритм, подалгоритм, программы, порядок выполнения и/или тому подобное. Дополнительно, результаты действий иллюстративных методик могут храниться в машиночитаемом носителе, отображаться на устройстве отображения, и/или тому подобное.
Как показано на Фиг. 9, методика 900 начинается на этапе 902 и на этапе 904 включает в себя этап зажатия по меньшей мере одного участка трубопровода с помощью подвижного зажимного устройства, включенного в устройство для прокладки трубопровода. На этапе 906 способ включает в себя перемещение подвижного зажимного устройства с помощью по меньшей мере одного привода из первого положения во второе положение в первом направлении вдоль рамы, что побуждает участки трубопровода перемещаться в отверстия во множестве корпусных сегментов и в каналы во множестве расположенных на расстоянии друг от друга поддерживающих рам.
Продолжаясь на этапе 908, методика может включать в себя этап освобождения по меньшей мере одного участка трубопровода из зажатия с помощью подвижного зажимного устройства. Также на этапе 910 методика может включать в себя этап перемещения подвижного зажимного устройства с помощью привода из второго положения в первое положение во втором направлении, которое является противоположным первому направлению, без перемещения трубопровода относительно корпусных сегментов и поддерживающих рам. В иллюстративном варианте осуществления дополнительное стационарное зажимное устройство может быть выполнено с возможностью зажатия трубопровода и предотвращения перемещения трубопровода при возврате подвижного зажимного устройства в первое положение.
Этапы 904-910 соответствуют циклу прокладки. После одного или более повторных циклов прокладки, методика может включать в себя этап 912 приваривания по меньшей мере одного сегмента трубопровода к трубопроводу на конце трубопровода, который находится снаружи отверстий корпусных сегментов. После удлинения трубопровода таким образом описанная методика может повторяться достаточное количество раз для прокладки все более и более длинного трубопровода в корпусные сегменты на расстояние, которое требуется для применения. На этапе 914 описанная методика может заканчиваться.
Как обсуждалось ранее, корпусные сегменты и поддерживающие рамы могут включать в себя более, чем одно отверстие и канал через них для использования с прокладывающимся дополнительным трубопроводом. В таких случаях описанная методика 900 может включать в себя переустановку устройства для прокладки с помощью описанных гидравлических тележек и подъемников для того, чтобы выровнять устройство для прокладки с другим расточенным отверстием. Ранее описанная методика 900 затем может выполняться для прокладки дополнительного трубопровода в другие расточенные отверстия в корпусных сегментах.
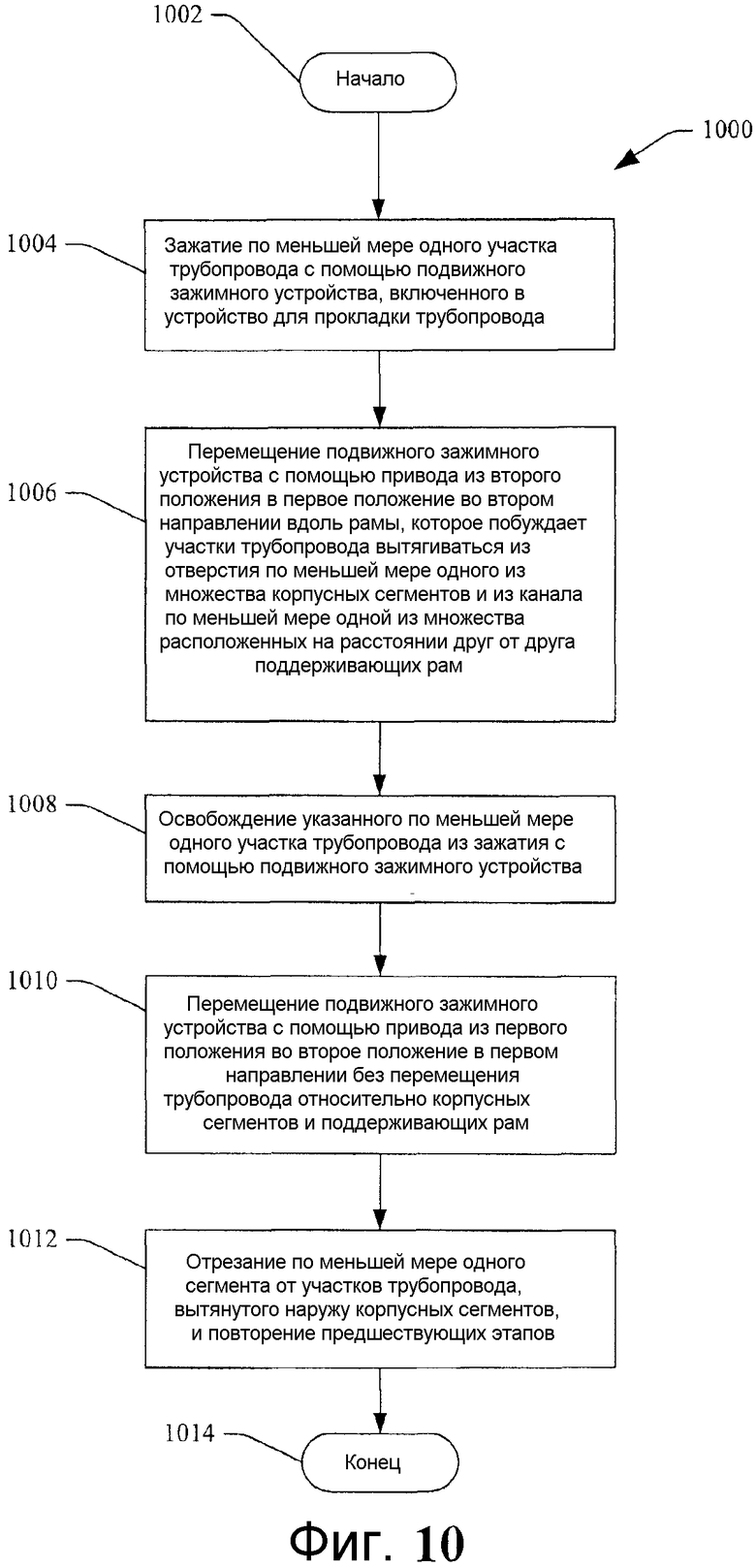
Теперь со ссылкой на Фиг. 10, иллюстративная методика показана и описана связанной с работой ранее описанной иллюстративной системы для прокладки трубопровода для извлечения трубопровода из отверстий корпусных сегментов в туннеле. Эта методика 1000 начинается на этапе 1002 и на этапе 1004 включает в себя этап зажатия по меньшей мере одного участка трубопровода с помощью подвижного зажимного устройства, включенного в устройство для прокладки трубопровода. На этапе 1006 способ включает в себя перемещение подвижного зажимного устройства с помощью привода из второго положения в первое положение во втором направлении вдоль рамы, что побуждает участки трубопровода вытягиваться из отверстия по меньшей мере одного из множества корпусных сегментов и из канала по меньшей мере одной из множества расположенных на расстоянии друг от друга поддерживающих рам.
Продолжаясь на этапе 1008, методика может включать в себя этап освобождения по меньшей мере одного участка трубопровода из зажатия с помощью подвижного зажимного устройства. Также на этапе 1010 методика может включать в себя этап перемещения подвижного зажимного устройства с помощью привода из первого положения во второе положение в первом направлении без перемещения трубопровода относительно корпусных сегментов и поддерживающих рам. В иллюстративном варианте осуществления стационарное зажимное устройство может быть выполнено с возможностью зажатия трубопровода и предотвращения перемещения трубопровода при возврате подвижного зажимного устройства в первое положение.
Этапы 1004-1010 соответствуют циклу извлечения. После одного или более повторных циклов извлечения методика может включать в себя этап 1012 отрезания по меньшей мере одного сегмента трубопровода от трубопровода на конце трубопровода, который был вытянут наружу отверстий корпусных сегментов. После укорачивания трубопровода таким образом, описанная методика может повторяться достаточное количество раз для извлечения все более и более короткого трубопровода из корпусных сегментов на расстояние, которое требуется для применения. На этапе 1014 описанная методика может заканчиваться.
В вариантах осуществления, в которых корпусные сегменты и поддерживающие рамы включают в себя больше, чем одно отверстие и канал через них, описанная методика 1000 может включать в себя переустановку устройства для прокладки с помощью описанных гидравлических тележек и подъемников для того, чтобы выровнять устройство для прокладки с другим расточенным отверстием. Ранее описанная методика 1000 затем может выполняться для извлечения дополнительного трубопровода из других расточенных отверстий в корпусных сегментах.
Методики 900 и 1000 были описаны относительно процесса прокладки или извлечения трубопроводов через отверстия в корпусных сегментах, смонтированных в выбуренном туннеле. Однако следует понимать, что все или части описанных методик и систем для прокладки могут быть приспособлены для использования в других окружающих средах, например в заболоченных землях и подступах к береговой линии, для трубопроводов. В таких случаях устройство для прокладки может использоваться для прокладки или извлечения трубопровода из расточенных отверстий других типов корпусных сегментов трубопровода, которые могут не соответствовать сегментам пола, имеющим верхнюю поверхность, используемую в качестве дороги. Следует понимать, что элемент корпусного сегмента может включать в себя другие типы конструкций, имеющих одно или более отверстий в них и которые могут обеспечивать расположение ранее описанных поддерживающих рам на противоположных концах отверстий, которые проходят через корпусные сегменты.
Как используется здесь, описанный по меньшей мере один процессор 112 может быть включен в вычислительное устройство (такое как компьютер или специализированный контроллер), которое выполняет команды, которые хранятся в памяти в виде программного обеспечения или микропрограммного обеспечения. Команды могут представлять собой, например, команды для побуждения устройств описанной системы приводить в действие или давать команды для осуществления одного или более способов, описанных выше. Процессор может получать доступ к памяти посредством системной шины или другого типа контроллера/шины памяти.
Кроме того, хотя показано в виде единой системы, следует понимать, что вычислительное устройство может представлять собой распределенную систему. Таким образом, например, процессор и несколько устройств могут находиться в сообщении посредством сетевого соединения и могут совместно выполнять задачи, описанные как выполняемые посредством описанных систем.
Следует отметить, что несколько примеров были даны с целью объяснения. Эти примеры не следует интерпретировать в качестве ограничения прилагаемой здесь формулы изобретения. Кроме того, может быть понятным, что примеры, данные здесь, могут переставляться, в то же время по-прежнему подпадая под объем формулы изобретения.
| название | год | авторы | номер документа |
|---|---|---|---|
| АВТОМАТИЗИРОВАННАЯ ПЛАТФОРМЕННАЯ СИСТЕМА ГРАВИМЕТРИЧЕСКОГО СКРИНИНГА И СПОСОБ | 2012 |
|
RU2593906C2 |
| СКОРОСТНОЕ СУДНО, СПОСОБНОЕ РАБОТАТЬ В УСЛОВИЯХ БУРНОЙ ВОДЫ | 2005 |
|
RU2418709C2 |
| СНЕГОХОД | 2009 |
|
RU2517918C2 |
| ВРАЩАЮЩИЕСЯ МНОГОКЛИПСАТОРНЫЕ ПЛАТФОРМЕННЫЕ СИСТЕМЫ, РАБОТАЮЩИЕ СОВМЕСТНО С МОДУЛЯМИ АДГЕЗИВНОГО ЗАПЕЧАТЫВАНИЯ, СИСТЕМЫ АДГЕЗИВНОГО ЗАПЕЧАТЫВАНИЯ И СООТВЕТСТВУЮЩИЕ УСТРОЙСТВА И СПОСОБЫ | 2013 |
|
RU2629968C2 |
| АВТОМАТИЗИРОВАННЫЙ БАНКОВСКИЙ АППАРАТ ВЫДАЧИ НАЛИЧНЫХ ДЕНЕГ С РАЗБОРКОЙ СТОПОК И ПОДТВЕРЖДЕНИЕМ ПОДЛИННОСТИ БАНКНОТ | 2004 |
|
RU2315360C1 |
| СВЕТОИЗЛУЧАЮЩИЙ ДИОД ДЛЯ УСТАНОВКИ НА ТЕПЛООТВОД | 2008 |
|
RU2484363C2 |
| УСТРОЙСТВО, СИСТЕМА И СПОСОБ ДЛЯ ПРИГОТОВЛЕНИЯ НАПИТКА, ПРИГОДНОГО ДЛЯ ПОТРЕБЛЕНИЯ, ИЗ КАПСУЛЫ | 2011 |
|
RU2570370C2 |
| МЕХАНИЗМ РЕГУЛИРОВКИ НАГРУЗКИ ПОДВЕСКИ СНЕГОХОДА | 2010 |
|
RU2547500C2 |
| РОБОТИЗИРОВАННЫЕ СПОСОБ И СИСТЕМА ДЛЯ ПЕРЕРАБОТКИ ТУШ | 2015 |
|
RU2671469C2 |
| КОНФИГУРАЦИИ ИНФУЗИОННОЙ СИСТЕМЫ | 2009 |
|
RU2512930C2 |
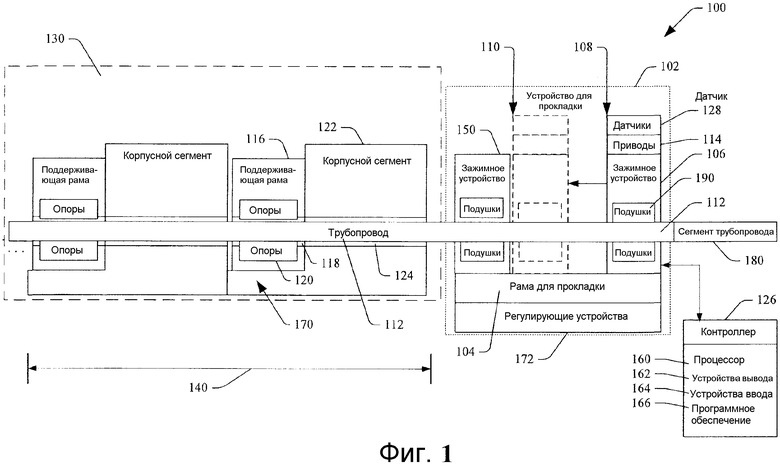
Система (100) для прокладки трубопровода может включать в себя устройство (102) для прокладки снаружи туннеля, которое включает в себя раму (104) устройства для прокладки и подвижное зажимное устройство (106) в скользящем сцеплении с рамой устройства для прокладки. Привод может побуждать подвижное зажимное устройство, сцепленное с трубопроводом, перемещаться между первым положением (108) и вторым положением (110) вдоль рамы. Внутри туннеля система также может включать в себя множество поддерживающих рам (118), расположенных на расстоянии от устройства для прокладки и расположенных на расстоянии друг от друга, которые поддерживают трубопровод на опорах, когда трубопровод проталкивается (или вытягивается) посредством устройства для прокладки через отверстия множества корпусных сегментов (122), смонтированных в туннеле. Контроллер (126) выполнен с возможностью управления приводом и подвижным зажимным устройством, в соответствии с преобразователями, которые измеряют проскальзывание трубопровода, осевую силу и давление зажатия. Также предлагаются два способа прокладки трубопровода. Повышается эффективность работы при прокладке трубопровода. 3 н. и 18 з.п. ф-лы, 10 ил. 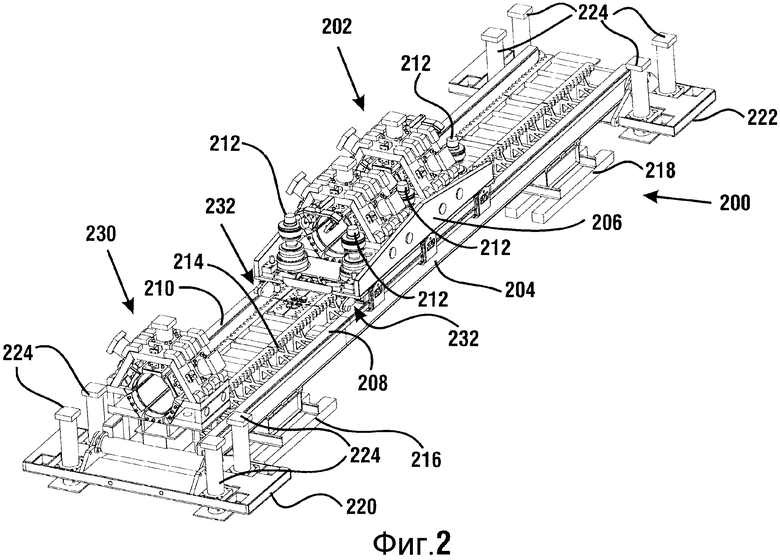
1. Система (100) для прокладки трубопровода, содержащая:
по меньшей мере один контроллер (126),
устройство (102) для прокладки, выполненное с возможностью размещения участка трубопровода (112), причем устройство для прокладки включает в себя:
раму (104) устройства для прокладки;
подвижное зажимное устройство (106) в скользящем сцеплении с рамой устройства для прокладки, причем указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения подвижного зажимного устройства переходить между первым состоянием и вторым состоянием, где в первом состоянии подвижное зажимное устройство выполнено с возможностью зажатия по меньшей мере одного участка трубопровода и предотвращения относительного перемещения между подвижным зажимным устройством и трубопроводом, и во втором состоянии подвижное зажимное устройство выполнено с возможностью освобождения указанного по меньшей мере одного участка трубопровода и обеспечения возможности относительного перемещения между подвижным зажимным устройством и трубопроводом;
по меньшей мере один привод (114), при этом указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство между первым положением (108) и вторым положением (110) вдоль рамы устройства для прокладки;
множество корпусных сегментов (122), причем каждый корпусной сегмент включает в себя по меньшей мере одно отверстие
(124) для размещения через него участков трубопровода;
множество поддерживающих рам (116), при этом каждая поддерживающая рама включает в себя канал (118) через нее с по меньшей мере одной опорой, смонтированной в нем, для размещения участков трубопровода в функционально скользящем соединении с указанной по меньшей мере одной опорой (120), причем поддерживающие рамы соответствующим образом расположены между отверстиями соседних корпусных сегментов таким образом, что отверстия корпусных сегментов и каналы поддерживающих рам выровнены для размещения трубопровода, проходящего по существу по прямой линии через них;
при этом указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения подвижного зажимного устройства переходить в первое состояние и с возможностью побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство из первого положения во второе положение для перемещения участков трубопровода в корпусных сегментах и поддерживающих рамах, причем указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения подвижного зажимного устройства переходить во второе состояние и с возможностью побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство из второго положения в первое положение без перемещения трубопровода относительно корпусных сегментов и поддерживающих рам.
2. Система для прокладки трубопровода по п.1, в которой каждая поддерживающая рама включает в себя множество роликовых опор типа с шариковым перемещением, смонтированных в канале каждой поддерживающей рамы, при этом по меньшей мере две из множества роликовых опор типа с шариковым перемещением для каждой поддерживающей рамы расположены в соответствующем канале поддерживающей рамы для размещения поддерживающим образом участков нижнего участка трубопровода, проходящего в канале поддерживающей рамы, и по меньшей мере две из множества роликовых опор типа с шариковым перемещением для каждой поддерживающей рамы расположены в соответствующем канале поддерживающей рамы так, чтобы быть обращенными к верхнему участку трубопровода, проходящего в канале поддерживающей рамы.
3. Система для прокладки трубопровода по п.1, в которой более отдаленные корпусные сегменты, расположенные относительно дальше от устройства для прокладки, чем более близкие корпусные сегменты, расположенные относительно ближе к устройству для прокладки, имеют относительно более короткую максимальную длину, чем более близкие корпусные сегменты.
4. Система для прокладки трубопровода по п.1, в которой корпусные сегменты включают в себя по существу плоские верхние поверхности, которые образуют по меньшей мере участки дороги в туннеле.
5. Система для прокладки трубопровода по п.4, в которой по меньшей мере один корпусной сегмент, который расположен между двумя поддерживающими рамами, имеет отверстие, проходящее между указанными по меньшей мере двумя поддерживающими рамами, которое составляет по меньшей мере 10 метров в длину, причем каждый корпусной сегмент выполнен из бетона.
6. Система для прокладки трубопровода по п.1, в которой рама устройства для прокладки включает в себя по меньшей мере одну зубчатую рейку, подвижное зажимное устройство включает в себя по меньшей мере одну шестерню в функциональном сцеплении с зубчатой рейкой, и указанный по меньшей мере один привод соответствует гидравлическому двигателю, который выполнен с возможностью побуждения указанной по меньшей мере одной шестерни вращаться, чтобы побуждать подвижное зажимное устройство перемещаться относительно рамы между первым и вторым положениями.
7. Система для прокладки трубопровода по п.6, в которой рама устройства для прокладки включает в себя по меньшей мере один рельс, и подвижное зажимное устройство включает в себя каретку, которая выполнена с возможностью скольжения относительно указанного по меньшей мере одного рельса между первым и вторым положениями.
8. Система для прокладки трубопровода по п.1, в которой рама устройства для прокладки включает в себя по меньшей мере одно стационарное зажимное устройство, причем подвижное зажимное устройство выполнено с возможностью перемещения как относительно рамы устройства для прокладки, так и стационарного зажимного устройства;
в которой стационарное зажимное устройство выполнено с возможностью размещения по меньшей мере участка трубопровода в нем, причем указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения стационарного зажимного устройства переходить между первым состоянием и вторым состоянием, где в первом состоянии стационарное зажимное устройство выполнено с возможностью зажатия по меньшей мере одного дополнительного участка трубопровода и предотвращения относительного перемещения между стационарным зажимным устройством и трубопроводом, и во втором состоянии стационарное зажимное устройство выполнено с возможностью освобождения указанного по меньшей мере одного дополнительного участка трубопровода и обеспечения возможности относительного перемещения между стационарным зажимным устройством и трубопроводом;
в которой указанный по меньшей мере один контроллер функционально выполнен с возможностью:
побуждения стационарного зажимного устройства переходить в первое состояние;
побуждения подвижного зажимного устройства переходить во второе состояние; и
побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство между первым и вторым положениями, тогда как стационарное зажимное устройство предотвращает перемещение трубопровода относительно рамы устройства для прокладки; и
в которой указанный по меньшей мере один контроллер функционально выполнен с возможностью:
побуждения стационарного зажимного устройства переходить во второе состояние;
побуждения подвижного зажимного устройства переходить в первое состояние; и
побуждения указанного по меньшей мере одного привода перемещать подвижное зажимное устройство между первым и вторым положениями, тогда как стационарное зажимное устройство обеспечивает возможность перемещения трубопровода относительно рамы устройства для прокладки.
9. Система для прокладки трубопровода по п.1, в которой подвижное зажимное устройство включает в себя по меньшей мере один стационарный участок и по меньшей мере один подвижный участок, в которой указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения по меньшей мере одного подвижного участка перемещаться между первым положением и вторым положением относительно указанного по меньшей мере одного стационарного участка, в которой указанный по меньшей мере один подвижный участок в первом положении жестко зажимает трубопровод между указанным по меньшей мере одним стационарным участком и указанным по меньшей мере одним подвижным участком, в которой указанный по меньшей мере один подвижный участок во втором положении расположен относительно дальше от указанного по меньшей мере одного стационарного участка, чем, когда указанный по меньшей мере один подвижный участок расположен в первом положении, и в котором первое состояние подвижного зажимного устройства включает в себя указанный по меньшей мере один подвижный участок в первом положении, и второе состояние подвижного зажимного устройства включает в себя по меньшей мере один подвижный участок во втором положении.
10. Система для прокладки трубопровода по п.9, в которой подвижное зажимное устройство включает в себя по меньшей мере три подвижных участка, расположенных так, чтобы перемещаться в трех разных соответствующих радиальных направлениях относительно продольной оси трубопровода, причем подвижные участки включают в себя подушки, которые выполнены с возможностью контактирования с внешней поверхностью трубопровода, и подвижное зажимное устройство включает в себя гидравлические цилиндры, которые выполнены с возможностью выборочного перемещения подушек подвижных участков между первым и вторым состояниями.
11. Система для прокладки трубопровода по п.9, дополнительно содержащая:
по меньшей мере один первый датчик, функционально выполненный с возможностью использования указанным по меньшей мере одним контроллером для определения, если трубопровод перемещается относительно подвижного зажимного устройства, когда указанный по меньшей мере один контроллер побуждает указанный по меньшей мере один привод перемещать подвижное зажимное устройство относительно рамы устройства для прокладки;
при этом указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения указанного по меньшей мере одного подвижного участка подвижного зажимного устройства обеспечивать увеличенную величину силы, подлежащей прикладыванию к трубопроводу посредством подвижного участка, в ответ на детектирование указанным по меньшей мере одним первым датчиком относительного перемещения между подвижным зажимным устройством и трубопроводом.
12. Система для прокладки трубопровода по п.11, дополнительно содержащая:
по меньшей мере один второй датчик, функционально выполненный с возможностью осуществления мониторинга величины давления, прикладываемого к трубопроводу посредством указанного по меньшей мере одного подвижного участка подвижного зажимного устройства;
при этом указанный по меньшей мере один контроллер функционально выполнен с возможностью предотвращения обеспечения указанным по меньшей мере одним подвижным участком подвижного зажимного устройства величины давления на трубопроводе, которая превышает заданное пороговое значение, в соответствии с указанным по меньшей мере одним вторым датчиком.
13. Система для прокладки трубопровода по п.1, дополнительно содержащая:
по меньшей мере один первый датчик, функционально выполненный с возможностью осуществления мониторинга величины силы, прикладываемой к трубопроводу в по меньшей мере одном направлении посредством подвижного зажимного устройства, при побуждении перемещаться посредством указанного по меньшей мере одного привода;
при этом указанный по меньшей мере один контроллер функционально выполнен с возможностью побуждения указанного по меньшей мере одного привода регулировать скорость перемещения подвижного зажимного устройства относительно рамы в соответствии с указанным по меньшей мере одним первым датчиком.
14. Способ перемещения трубопровода, включающий этапы:
а) зажатие по меньшей мере одного участка трубопровода с помощью подвижного зажимного устройства, включенного в устройство для прокладки трубопровода, где устройство для прокладки трубопровода включает в себя раму устройства для прокладки, подвижное зажимное устройство в скользящем сцеплении с рамой устройства для прокладки, и по меньшей мере один привод, причем подвижное зажимное устройство выполнено с возможностью перемещения между первым положением и вторым положением вдоль рамы устройства для прокладки, и подвижное зажимное устройство функционально выполнено с возможностью перехода между первым состоянием и вторым состоянием, причем в первом состоянии подвижное зажимное устройство выполнено с возможностью зажатия указанного по меньшей мере одного участка трубопровода и предотвращения относительного перемещения между подвижным зажимным устройством и трубопроводом в по меньшей мере одном направлении, и во втором состоянии подвижное зажимное устройство выполнено с возможностью освобождения указанного по меньшей мере одного участка трубопровода и обеспечения возможности относительного перемещения между подвижным зажимным устройством и трубопроводом; и
b) перемещение подвижного зажимного устройства с помощью указанного по меньшей мере одного привода из первого положения во второе положение в первом направлении вдоль рамы устройства для прокладки, которое побуждает участки трубопровода перемещаться в по меньшей мере одном отверстии в по меньшей мере одном из множества корпусных сегментов и в по меньшей мере одном канале в по меньшей мере одной из множества расположенных на расстоянии друг от друга поддерживающих рам, причем каждый канал каждой поддерживающей рамы включает в себя по меньшей мере одну опору, смонтированную в нем, для размещения участков трубопровода в функционально скользящем соединении с указанной по меньшей мере одной опорой, при этом поддерживающие рамы соответствующим образом расположены между отверстиями соседних корпусных сегментов таким образом, что отверстия корпусных сегментов и каналы поддерживающих рам выровнены для размещения трубопровода, проходящего по существу по прямой линии через них.
15. Способ по п.14, дополнительно включающий этапы:
c) освобождение указанного по меньшей мере одного участка трубопровода из зажатия с помощью подвижного зажимного устройства; и
d) перемещение подвижного зажимного устройства с помощью указанного по меньшей мере одного привода из второго положения в первое положение во втором направлении, которое является противоположным первому направлению, без перемещения трубопровода относительно корпусных сегментов и поддерживающих рам.
16. Способ по п.15, в котором по меньшей мере один контроллер функционально выполнен с возможностью побуждения подвижного зажимного устройства и указанного по меньшей мере одного привода выполнять этапы (а)-(d).
17. Способ по п.16, дополнительно включающий этапы:
е) перед этапом (а) приваривание по меньшей мере одного сегмента трубопровода к трубопроводу, когда трубопровод находится в функционально поддерживаемом соединении с устройством для прокладки и когда трубопровод проходит через по меньшей мере один корпусной сегмент и по меньшей мере одну поддерживающую раму;
при этом на этапе (b), когда подвижное зажимное устройство перемещается из первого положения во второе положение, участки сегмента трубопровода перемещаются в место, которое является способным непосредственно сцепляться посредством подвижного зажимного устройства после возврата подвижного зажимного устройства в первое положение на этапе (d).
18. Способ по п.17, дополнительно включающий выполнение этапов (а)-(е) достаточное количество раз, включая приваривание достаточного количества дополнительных сегментов трубопровода к трубопроводу на этапе (е) для побуждения указанного по меньшей мере одного сегмента трубопровода перемещаться через множество корпусных сегментов и множество поддерживающих рам на расстояние по меньшей мере один километр по существу по прямой линии.
19. Способ по п.15, в котором рама включает в себя по меньшей мере одно стационарное зажимное устройство и в котором подвижное зажимное устройство выполнено с возможностью перемещения как относительно рамы, так и относительно стационарного зажимного устройства, при этом стационарное зажимное устройство выполнено с возможностью размещения по меньшей мере участка трубопровода в нем, и стационарное зажимное устройство функционально выполнено с возможностью перехода между первым состоянием и вторым состоянием, причем в первом состоянии стационарное зажимное устройство находится в жестком сцеплении с трубопроводом, где жесткое сцепление предотвращает относительное перемещение между стационарным зажимным устройством и трубопроводом в указанном по меньшей мере одном направлении, и во втором состоянии стационарное зажимное устройство выполнено с возможностью обеспечения относительного перемещения между стационарным зажимным устройством и трубопроводом в указанном по меньшей мере одном направлении, при этом способ дополнительно включает:
е) перед этапом (а) приведение в действие стационарного зажимного устройства для перехода во второе состояние, причем на этапе (а) подвижное зажимное устройство переходит в первое состояние, и на этапе (b) подвижное зажимное устройство перемещается из первого положения во второе положение в первом направлении, тогда как стационарное зажимное устройство обеспечивает возможность перемещения трубопровода относительно рамы устройства для прокладки; и
f) перед этапом (d) приведение в действие стационарного зажимного устройства для перехода в первое состояние для жесткого сцепления с по меньшей мере одним участком трубопровода, причем на этапе (с) подвижное зажимное устройство переходит во второе состояние, и на этапе (d) подвижное зажимное устройство перемещается из второго положения в первое положение во втором направлении, тогда как стационарное зажимное устройство предотвращает перемещение трубопровода относительно рамы устройства для прокладки.
20. Способ перемещения трубопровода, включающий этапы:
а) зажатие по меньшей мере одного участка трубопровода подвижным зажимным устройством, включенным в устройство для прокладки трубопровода, где трубопровод составляет по меньшей мере один километр в длину, при этом устройство для прокладки трубопровода включает в себя раму устройства для прокладки, где подвижное зажимное устройство находится в скользящем сцеплении с рамой устройства для прокладки, и по меньшей мере один привод, при этом подвижное зажимное устройство выполнено с возможностью перемещения между первым положением и вторым положением вдоль рамы устройства для прокладки, и подвижное зажимное устройство функционально выполнено с возможностью перехода между первым состоянием и вторым состоянием, причем в первом состоянии подвижное зажимное устройство выполнено с возможностью зажатия указанного по меньшей мере одного участка трубопровода и предотвращения относительного перемещения между подвижным зажимным устройством и трубопроводом в по меньшей мере одном направлении, и во втором состоянии подвижное зажимное устройство выполнено с возможностью освобождения указанного по меньшей мере одного участка трубопровода и обеспечения возможности относительного перемещения между подвижным зажимным устройством и трубопроводом; и
b) перемещение подвижного зажимного устройства с помощью по меньшей мере одного привода из первого положения во второе положение в первом направлении вдоль рамы устройства для прокладки, что побуждает участки трубопровода перемещаться в каналах в множестве расположенных на расстоянии друг от друга поддерживающих рам в туннели, причем каждый канал каждой поддерживающей рамы включает в себя по меньшей мере один ролик, выполненный с возможностью контакта с трубопроводом, когда трубопровод перемещается через канал, и поддерживающие рамы располагаются в туннели в расположенном на расстоянии положении, охватывая расстояние в по меньшем мере один километр, при этом каналы поддерживающих опор выровнены с возможностью приема перемещающегося трубопровода, проходящего по существу по прямой линии через них на протяжении по меньшей мере одного километра.
21. Способ по п.20, в котором этап (b) включает побуждение участков трубопровода перемещаться в отверстиях во множестве корпусных сегментов и в каналах множества расположенных на расстоянии друг от друга поддерживающих рам, где указанные участки корпусных сегментов и поддерживающих рам охватывают расстояние в по меньшей мере один километр, и поддерживающие рамы соответственно расположены между отверстиями соседних корпусных сегментов таким образом, что отверстия корпусных сегментов и каналы поддерживающих рам выровнены для размещения трубопровода, проходящего по существу по прямой линии через них на протяжении по меньшей мере одного километра.

