УРОВЕНЬ ТЕХНИКИ И СУЩНОСТЬ РАСКРЫТИЯ
[0001] Представленное раскрытие относится к системе и способу предоставления регулируемых условий увлажнения почвы для горшечных растений в крупномасштабной, автоматизированной гравиметрической скрининговой системе, как правило, располагающейся в теплице.
[0002] Гравиметрический метод представляет собой известную методику применения режима точного стресса, вызываемого засухой, к растениям, выращиваемым в контейнерах или сосудах, посредством измерения изменений массы сосуда. Измерение массы сосуда обеспечивает точный расчет изменений влажности почвы, а значения восполнения воды определяют путем подсчета разницы между фактическим содержанием воды и желательным содержанием воды на основании предварительно заданной программы дефицита воды. При подходящем регулировании потери воды из почвы за счет испарения гравиметрический метод предоставляет возможность определения транспирации растений и общего использования растениями воды на протяжении эксперимента.
[0003] Обычно гравиметрический скрининг представляет собой трудоемкий интенсивный процесс, что ограничивает производительность и пропускную способность в специальных скрининговых программах. Общепринятые скрининговые системы передвигают отдельные сосуды к месту взвешивания и повторного орошения. В некоторых случаях блоки растений целиком передвигают как единое целое в другое место для измерений массы и повторного орошения. Данное перемещение привносит в методики тестирования дополнительные искажающие эффекты, такие как, например, вибрации в процессе передвижения и условия низкой плотности произрастания, которые не характерны для полевых условий. Данные известные гравиметрические скрининговые системы не обеспечивают наиболее эффективное использование тепличного пространства.
[0004] Автоматизированная гравиметрическая скрининговая система и способ представленного раскрытия предоставляют высокопроизводительную тепличную скрининговую систему, использующую опорную платформу и конструкцию сосуда, которые сохраняют растения в неподвижном положении в процессе тестирования. Система содержит нижний портал, расположенный под опорной платформой, который имеет множество независимых динамометрических модулей и водопроводную систему для взвешивания и подачи воды в каждый ряд сосудов. В проиллюстрированном варианте осуществления каждый ряд сосудов одновременно поднимается динамометрическими модулями для получения массы, расчета, сколько воды необходимо добавить для доведения сосуда до необходимой массы, а затем подачи воды в сосуд на основании расчета. Нижний портал выравнивается с каждым рядом сосудов по мере того, как он движется вдоль длины опорной платформы. В виде иллюстрации весь ряд сосудов одновременно взвешивается и повторно орошается за считанные минуты без перемещения сосудов в отдельное место взвешивания. За счет взвешивания и повторного орошения сосудов из-под платформы представленная система и способ обеспечивают возможность высокоскоростному автоматизированному верхнему порталу делать изображения высокого разрешения, собирать данные о температуре или данные других датчиков для количественного определения уровня стресса растений или характеристик листового полога растений в процессе эксперимента.
[0005] Представленные система и способ обеспечивают пониженный шум и более равномерные и точно регулируемые окружающие условия водного стресса для групп эксперимента как с хорошим поливом, так и с засухой. Улучшенное регулирование делает возможным сравнение измеренных физиологических параметров с большей достоверностью, так как водный стресс является одинаковым и равномерным по всему эксперименту.
[0006] В виде иллюстрации платформенная и портальная система использует изготовленный по индивидуальному заказу сосуд, выполненный с возможностью работы с нижним порталом, расположенным под опорной платформой для взвешивания и повторного орошения сосудов. Проиллюстрированные сосуды обеспечивают возможность повторного орошения из-под поверхности почвы. В виде иллюстрации каждый сосуд содержит систему резервуаров, выполненную с возможностью удерживания в ней воды. Система резервуаров окружает столб почвы, образованный сосудом, от места непосредственно под верхней поверхностью почвы до дна сосуда. Проиллюстрированный вариант осуществления обеспечивает жидкостное сообщение системы резервуаров с почвой, предоставленное за счет множества вертикальных каналов для текучей среды, которые тянутся вдоль внутренней окружности сосуда. В проиллюстрированном варианте осуществления каналы покрывает сетка из синтетической ткани для предотвращения накапливания в каналах резервуара корней и сорного мусора. В виде иллюстрации вода и/или питательные вещества доставляются в резервуар через динамометрический модуль и через обратный клапан, расположенный на дне сосуда. При контакте с опорной поверхностью динамометрического модуля уплотнительное кольцо на сосуде образует уплотнение вокруг обратного клапана для уменьшения потери воды. Сосуды доставляют точные количества воды в столб почвы, и результатом этого является здоровый растительный материал с приемлемым ростом и развитием.
[0007] В одном проиллюстрированном варианте осуществления представленного раскрытия предоставлена система для регулирования влажности почвы у множества горшечных растений для проведения экспериментов по нехватке воды. Система содержит стационарную платформу, имеющую множество образованных в ней отверстий. Отверстия на платформе расположены во множестве рядов. Система также содержит множество сосудов, расположенных во множестве отверстий в платформе. Сосуды поддерживаются платформой. Подвижный нижний портал располагается под платформой. Подвижный нижний портал поддерживает множество динамометрических модулей, выровненных с множеством сосудов, расположенных в ряду отверстий. Каждый динамометрический модуль содержит тензодатчик, имеющий опору, способную передвигаться из втянутого положения, отделенного промежутком от нижней поверхности сосуда, в выдвинутое положение, в котором опора тензодатчика поднимает сосуд вверх для поддержки на ней массы сосуда таким образом, чтобы тензодатчик взвешивал поднятый сосуд. Система дополнительно содержит контроллер, соединенный с тензодатчиком. Контроллер запрограммирован определять, нуждаются ли сосуды в орошении на основании массы сосудов и эксперимента по нехватке воды. Также система дополнительно содержит водопровод, соединенный с динамометрическим модулем. Водопровод содержит по меньшей мере один клапан регулирования потока, управляемый контроллером, для избирательной подачи воды через динамометрический модуль в сосуд.
[0008] В проиллюстрированном варианте осуществления система дополнительно содержит верхний портал, передвигающийся над платформой, при этом верхний портал содержит по меньшей мере один расположенный на нем датчик для получения данных, связанных с растениями, во множестве сосудов. В виде иллюстрации датчиком является камера для получения изображений растений во множестве сосудов, температурный датчик или другой датчик.
[0009] В еще одном проиллюстрированном варианте осуществления представленного раскрытия, предоставлен способ регулирования влажности почвы у множества горшечных растений для проведения экспериментов по нехватке воды. Способ включает предоставление стационарной платформы, имеющей множество отверстий в ней, и расположение множества сосудов в отверстиях платформы. Сосуды поддерживаются платформой. Способ также включает поднимание сосудов с множеством динамометрических модулей, взвешивание каждого из множества сосудов динамометрическими модулями, определение, нуждаются ли сосуды в орошении на основании массы сосудов и эксперимента по нехватке воды, орошение сосудов через динамометрические модули, если необходимо, на основании стадии определения, и опускание множества динамометрических модулей таким образом, чтобы множество сосудов поддерживалось платформой.
[0010] В проиллюстрированном варианте осуществления отверстия в платформе расположены во множестве рядов. На стадии передвижения множества динамометрических модулей под платформой динамометрические модули выравниваются с рядом сосудов, а на стадии подъема сосудов весь ряд сосудов поднимается одновременно с множеством динамометрических модулей. Способ также включает передвижение динамометрических модулей к следующему ряду сосудов и выполнение стадий подъема, взвешивания, определения, орошения и опускания для следующего ряда сосудов.
[0011] В еще одном проиллюстрированном варианте осуществления представленного раскрытия, предоставлен сосуд для использования с системой для регулирования влажности почвы у множества горшечных растений для проведения экспериментов по нехватке воды. Система содержит стационарную платформу, имеющую множество образованных в ней отверстий. Сосуд содержит корпусную часть, имеющую открытый верхний конец и нижний конец, и фланец, соединенный с корпусной частью рядом с верхним концом. Фланец выполнен с возможностью зацепления платформы для удерживания корпусной части внутри отверстия платформы. Сосуд также содержит резервуар для текучей среды, имеющий нижнюю часть, расположенную рядом с нижним концом корпусной части, множество вертикально расположенных каналов для текучей среды, тянущихся вверх в направлении верхнего конца корпусной части, и заливное отверстие, расположенное в нижнем конце корпусной части в сообщении с нижней частью резервуара для текучей среды. Сосуд дополнительно содержит обратный клапан, соединенный с заливным отверстием для предоставления текучей среды, подлежащей подаче в резервуар для текучей среды из нижнего конца корпусной части через заливное отверстие и обратный клапан.
[0012] В проиллюстрированном варианте осуществления сосуд содержит сетку, образующую внутреннюю часть вертикально расположенных каналов для текучей среды. Сетка обеспечивает возможность протекания текучей среды через сетку в почву внутри корпусной части, но предотвращает накапливание почвенного мусора и корней растений в вертикально проходящих каналах для текучей среды резервуара.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0013] Вышеизложенные аспекты и множество дополнительных признаков представленной системы и способа можно будет более легко оценить и лучше понять посредством ссылки на следующее подробное описание, сделанное в сочетании с сопровождающими чертежами.
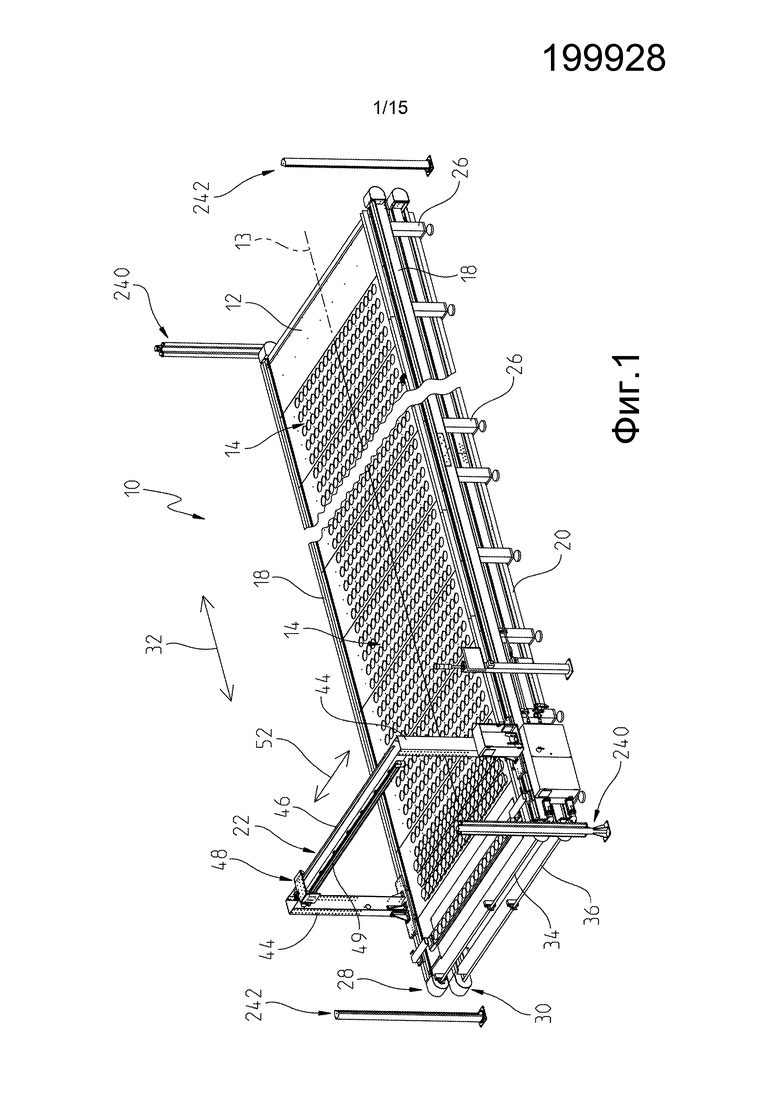
[0014] Фиг. 1 представляет собой перспективное изображение автоматизированной платформенной системы гравиметрического скрининга в соответствии с проиллюстрированным вариантом осуществления представленного раскрытия.
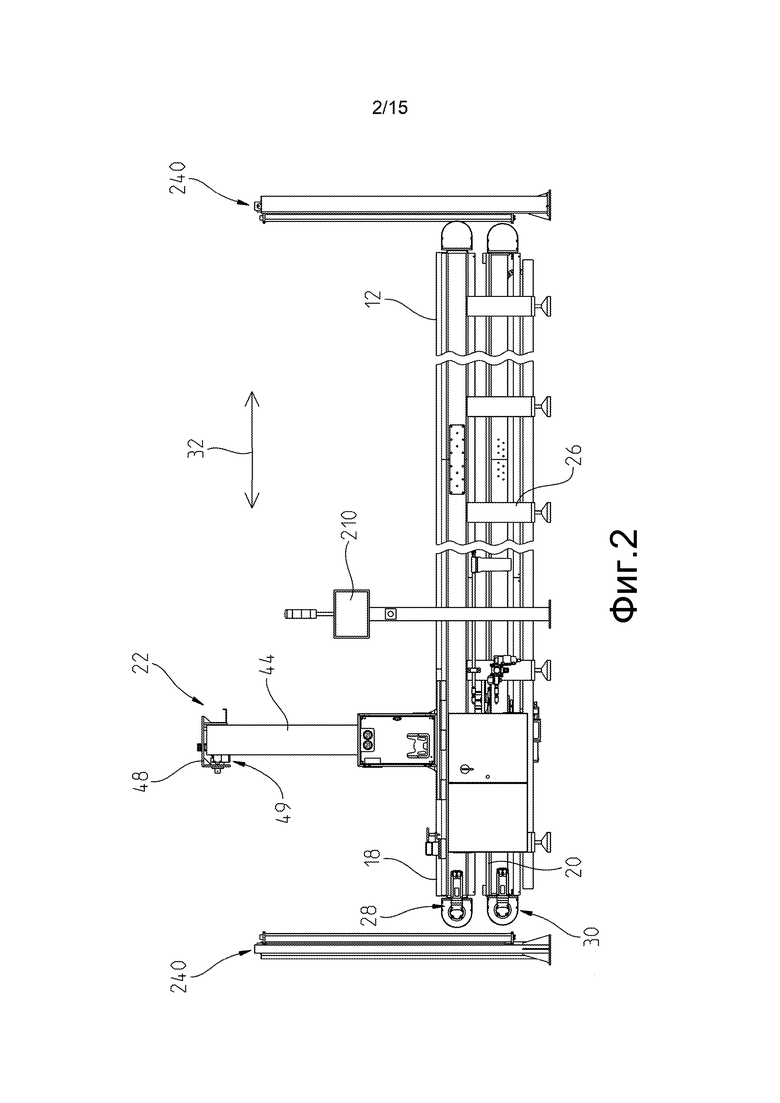
[0015] Фиг. 2 представляет собой вид сбоку в разрезе, с вырезанными участками, платформенной системы гравиметрического скрининга фиг. 1.
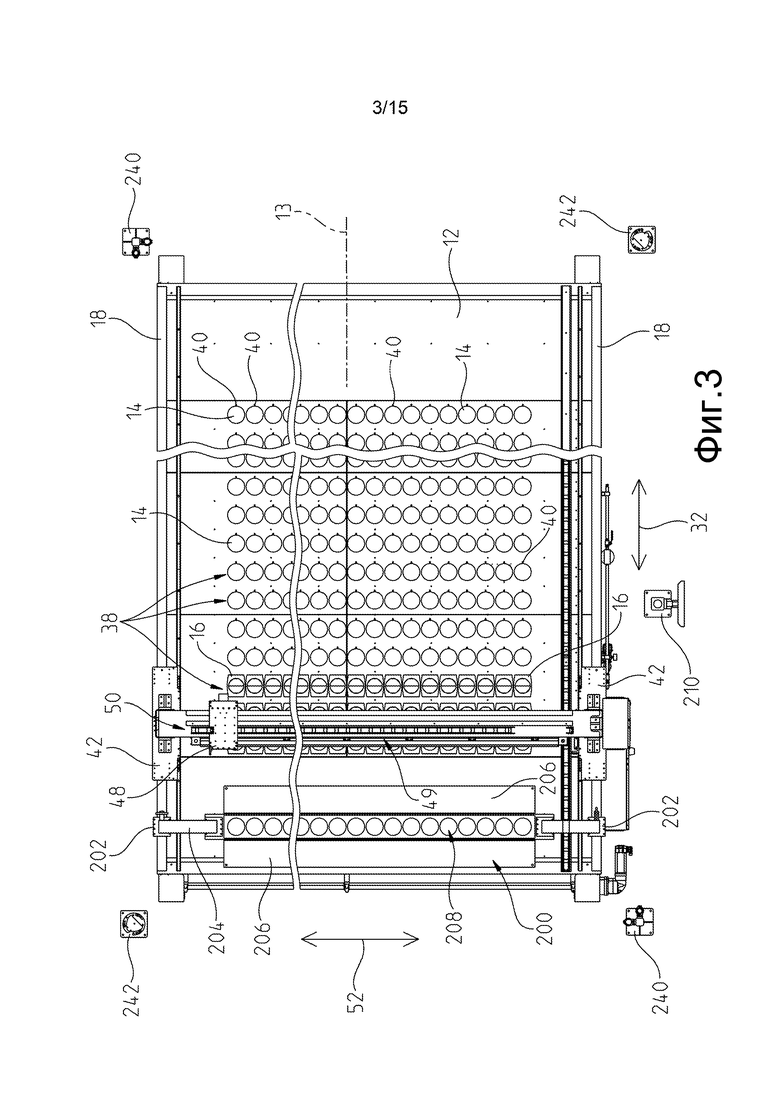
[0016] Фиг. 3 представляет собой вид сверху, с вырезанными участками, платформенной системы гравиметрического скрининга фиг. 1 и 2.
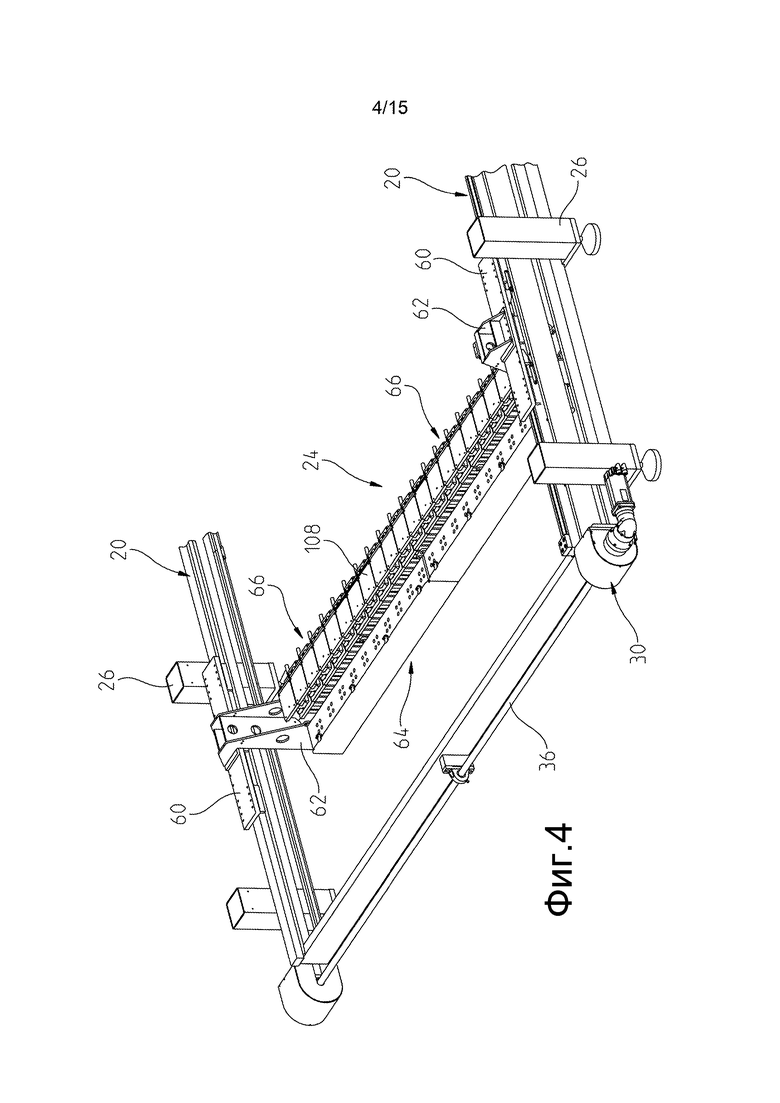
[0017] Фиг. 4 представляет собой перспективное изображение, иллюстрирующее нижний портал, содержащий множество динамометрических модулей и систему доставки воды для взвешивания и орошения множества сосудов платформенной системы гравиметрического скрининга.
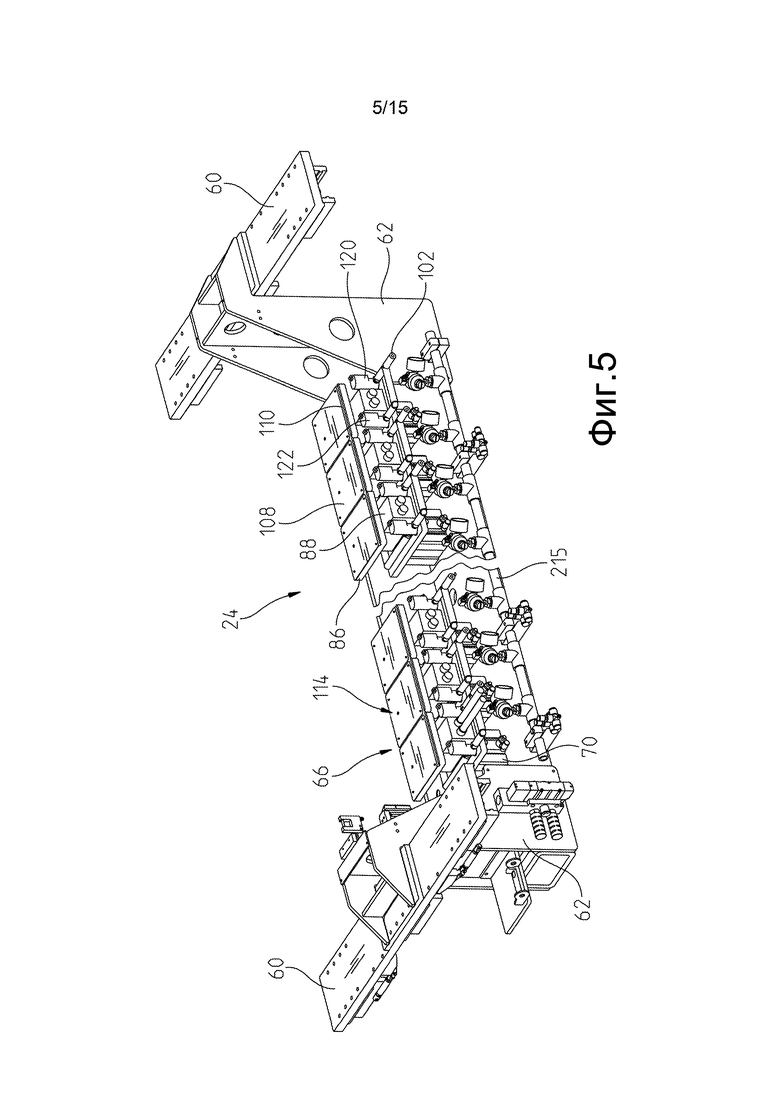
[0018] Фиг. 5 представляет собой увеличенное перспективное изображение, с вырезанными участками, нижнего портала фиг. 4.
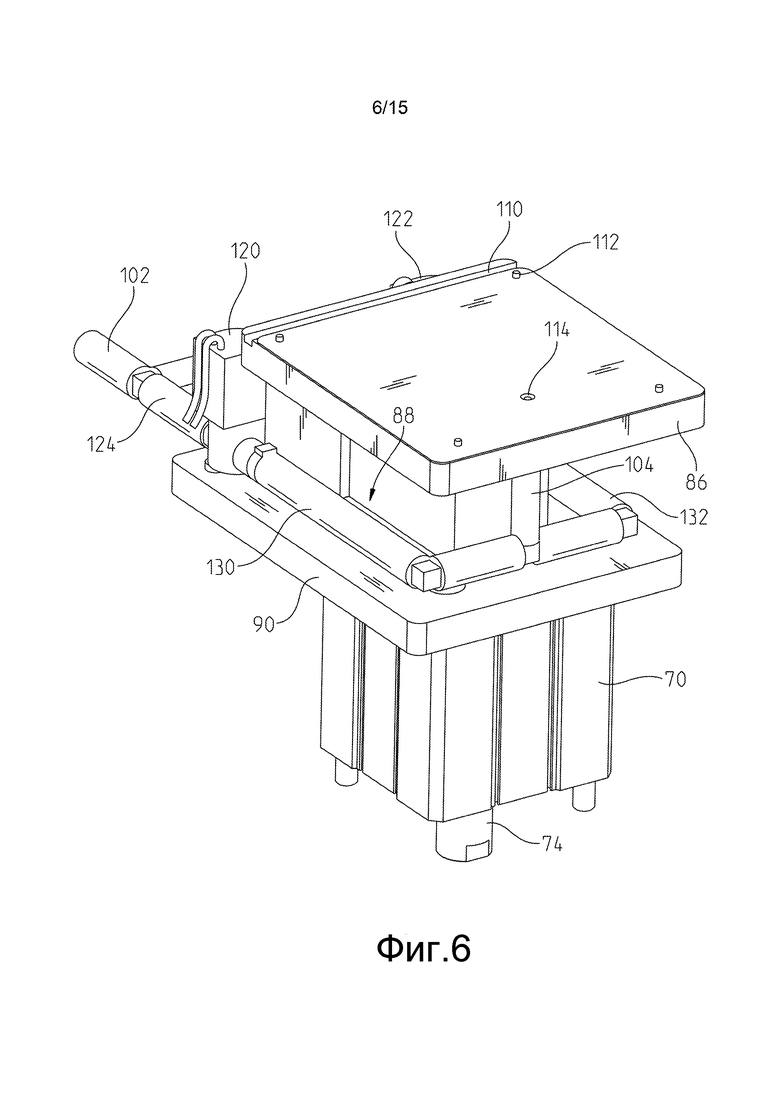
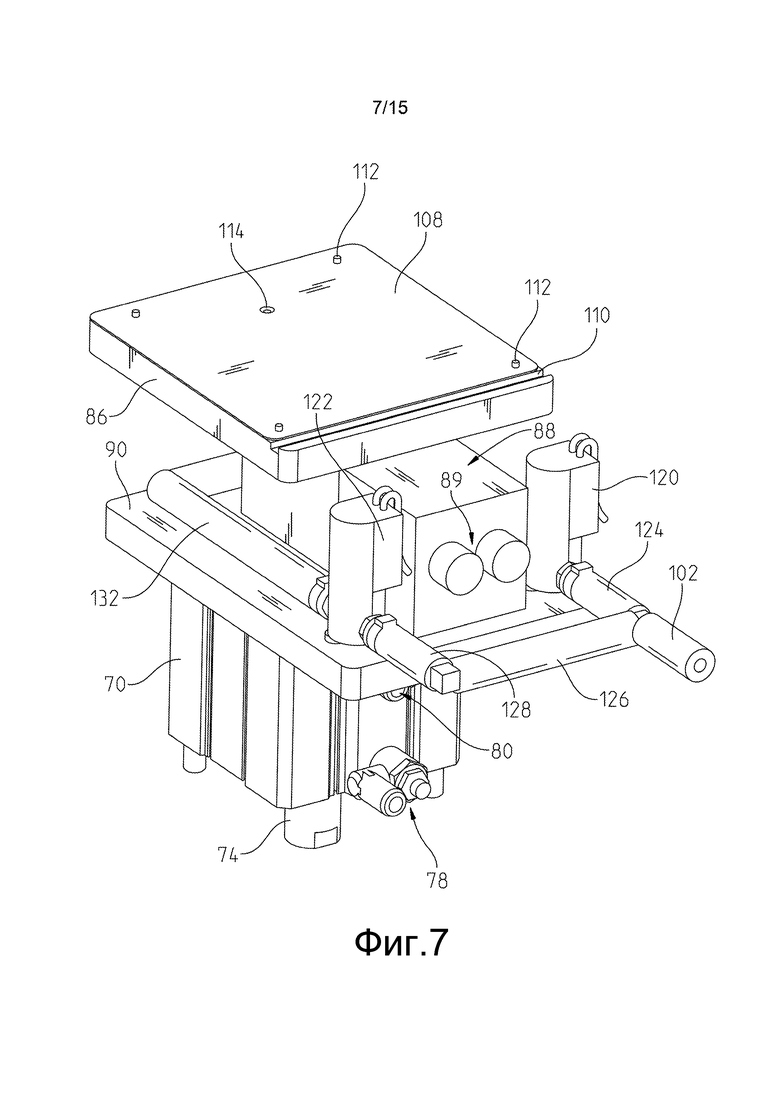
[0019] Фиг. 6 и 7 представляют собой перспективные изображения одного из динамометрических модулей на нижнем портале.
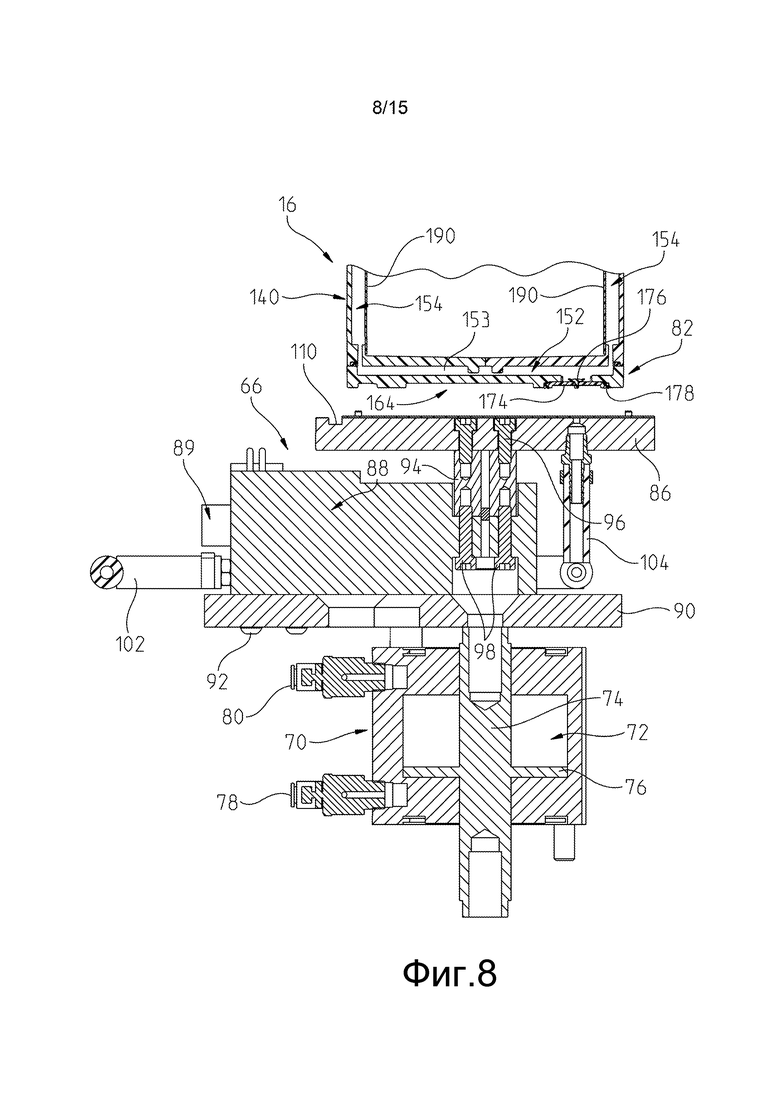
[0020] Фиг. 8 представляет собой вид в разрезе, сделанный через динамометрический модуль фиг. 6 и 7, иллюстрирующий опорную поверхность тензодатчика для сосуда во втянутом положении, отделенном промежутком от нижней поверхности одного из сосудов платформенной системы гравиметрического скрининга.
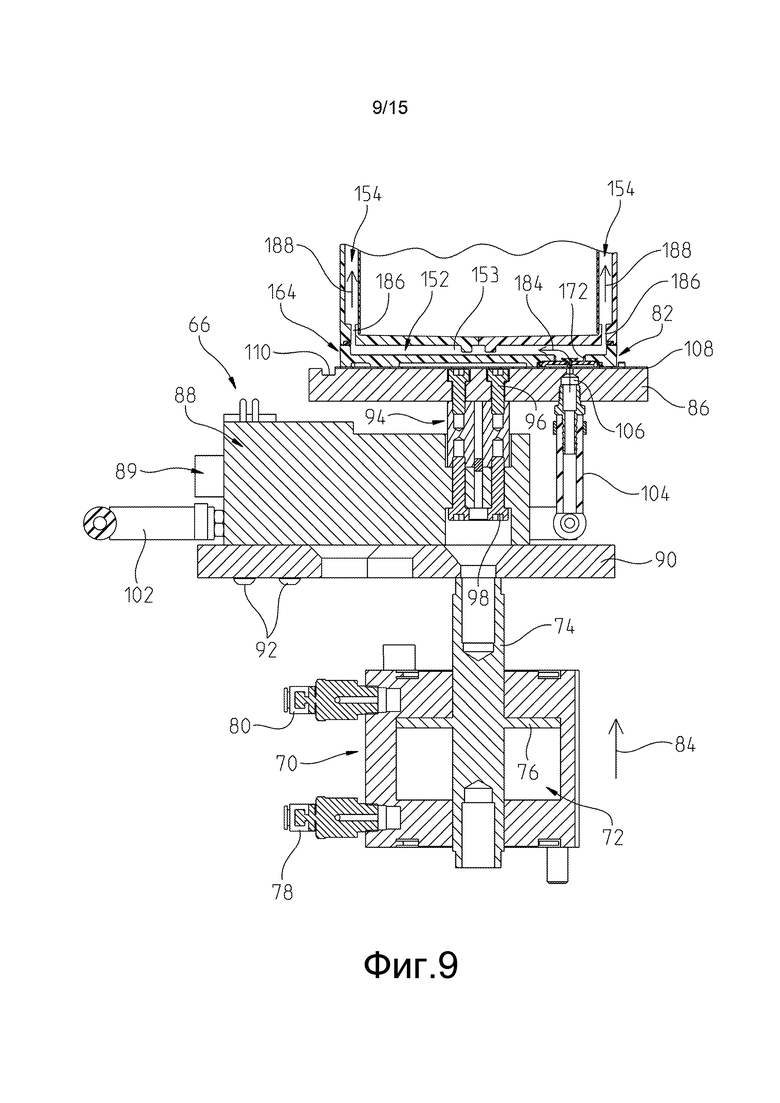
[0021] Фиг. 9 представляет собой вид в разрезе по аналогии с фиг. 8, в котором опорная поверхность тензодатчика для сосуда передвинута в выдвинутое вверх положение для подъема сосуда с целью взвешивания и орошения сосуда динамометрическим модулем.
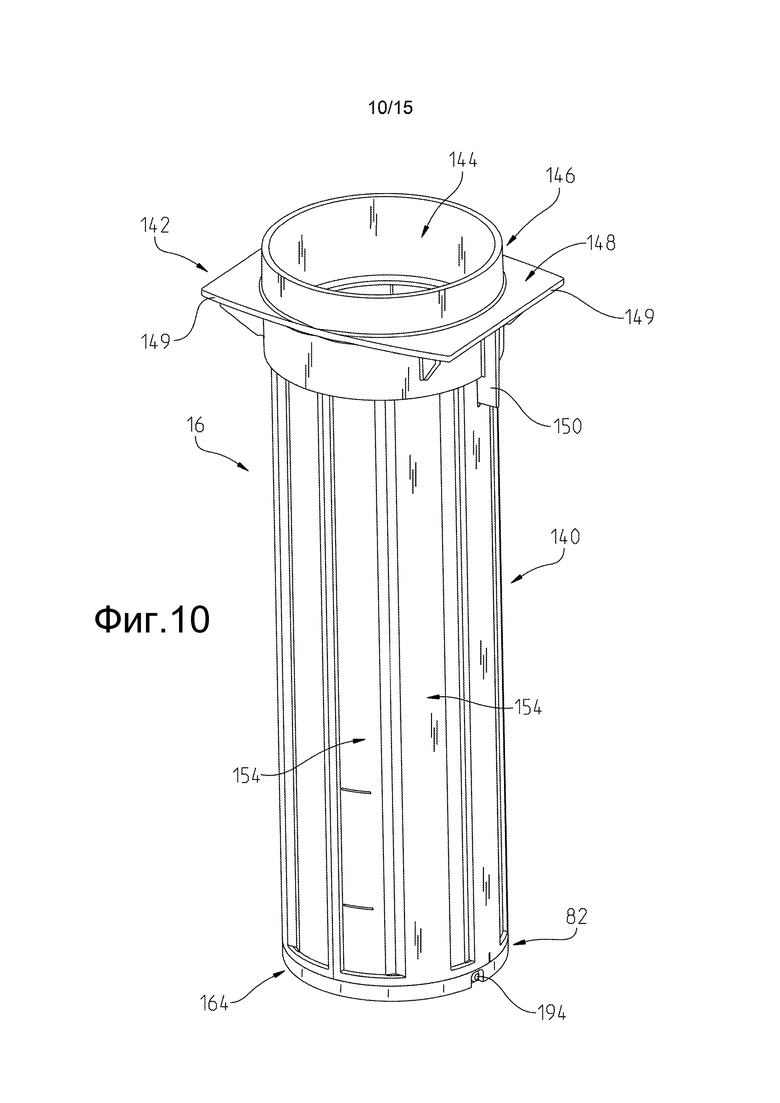
[0022] Фиг. 10 и 11 представляют собой перспективные изображения одного из сосудов, используемых с платформенной системой гравиметрического скрининга.
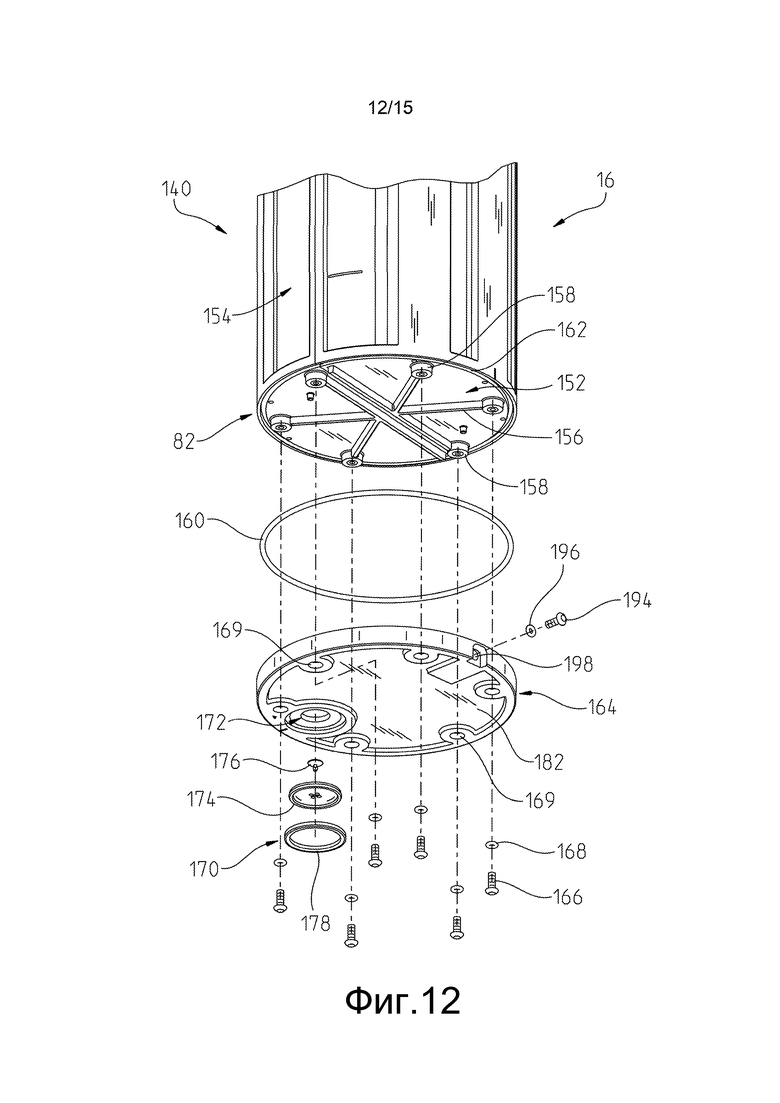
[0023] Фиг. 12 представляет собой перспективное изображение в разобранном виде, показывающее нижнюю торцевую крышку резервуара для текучей среды, содержащую обратный клапан для предоставления возможности подачи воды из динамометрического модуля в сосуд.
[0024] Фиг. 13 представляет собой вид в разрезе, с вырезанными участками, сосуда фиг. 10-12.
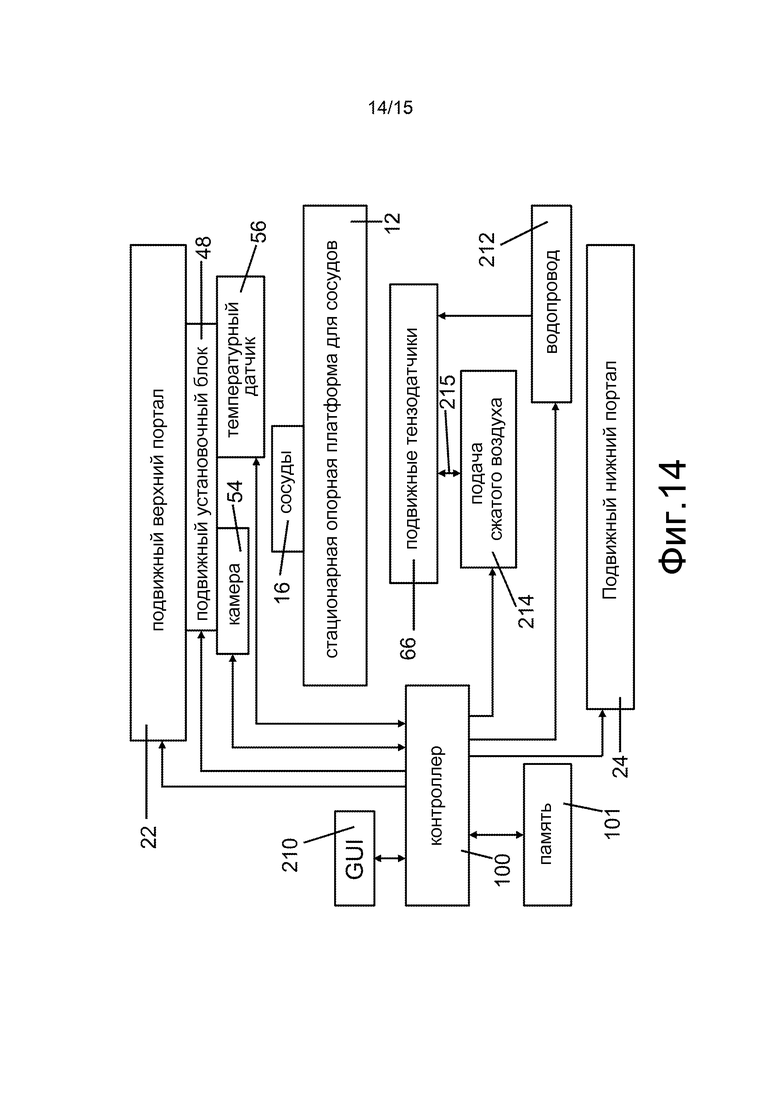
[0025] Фиг. 14 представляет собой блок-схему, иллюстрирующую дополнительные составные части одного варианта осуществления платформенной системы гравиметрического скрининга; а
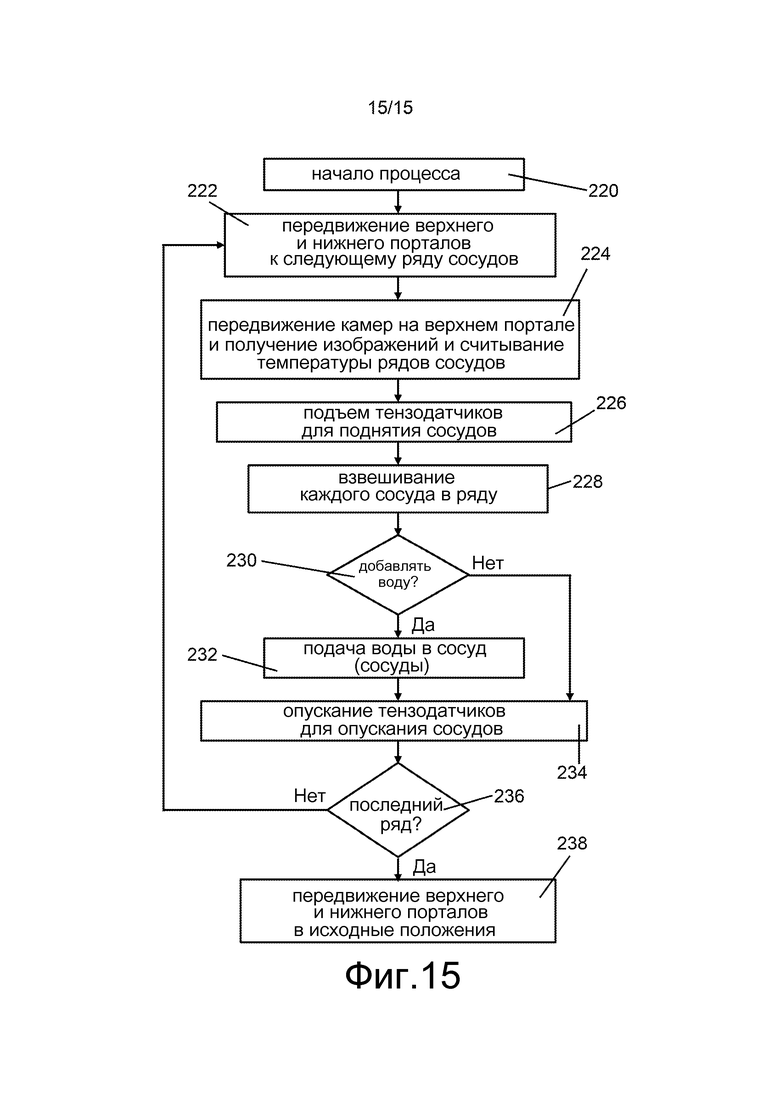
[0026] фиг. 15 представляет собой технологическую схему, иллюстрирующую стадии, выполняемые во время работы платформенной системы гравиметрического скрининга и способ.
[0027] Соответствующие условные обозначения обозначают соответствующие детали на нескольких изображениях. Хотя чертежи представляют варианты осуществления различных признаков и составных частей согласно представленному раскрытию, чертежи необязательно изображены в масштабе, и некоторые признаки могут быть очень сильно увеличены для того, чтобы лучше проиллюстрировать и объяснить представленное раскрытие. Пояснение на примере, приведенное в данном описании, иллюстрирует варианты осуществления изобретения, и подобные пояснения на примере никоим образом не следует истолковывать как ограничение объема правовых притязаний изобретения.
ПОДРОБНОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
[0028] С целью помочь в понимании принципов представленного раскрытия далее будет сделана ссылка на варианты осуществления, проиллюстрированные на чертежах, которые описаны ниже. Варианты осуществления, раскрытые ниже, не предназначены считаться исчерпывающими или ограничивать изобретение точной формой, раскрытой в следующем подробном описании. Вместо этого варианты осуществления выбраны и описаны для того, чтобы другие квалифицированные специалисты в данной области могли использовать их идеи. Должно быть понятно, что за счет этого не предполагается никакого ограничения объема правовых притязаний изобретения. Изобретение охватывает любые изменения и дополнительные модификации в проиллюстрированных устройствах и описанных способах и дополнительные варианты применения принципов изобретения, которые, как правило, будут встречаться квалифицированным специалистам в области, к которой относится изобретение.
[0029] Сначала со ссылкой на фиг. 1-3, раскрыт проиллюстрированный вариант осуществления платформенной системы 10 гравиметрического скрининга. Система 10 содержит стационарную опорную платформу 12, имеющую множество образованных в ней отверстий 14. Отверстия 14 выполнены с возможностью приема в них множества специально выполненных контейнеров или сосудов 16 для выращиваемых растений в регулируемых окружающих условиях, как обсуждается в данном описании. Система 10 содержит пару верхних направляющих 18 и пару нижних направляющих 20, расположенных на противоположных сторонах опорной платформы 12 для поддержки верхнего и нижнего подвижных порталов 22 и 24. Верхний портал 22 лучше всего показан на фиг. 1-3, тогда как нижний портал 24 лучше всего показан на фиг. 4 и 5. Платформа 12 и направляющие 18 и 20 поддерживаются множеством регулируемых опорных стоек 26, которые разнесены по внешней периферии платформы 12.
[0030] В проиллюстрированном варианте осуществления верхний и нижний приводные механизмы 28 и 30 выполнены с возможностью передвижения верхнего и нижнего порталов 22 и 24 соответственно взад и вперед на направляющих 18 и 20 продольно относительно платформы 12, как проиллюстрировано двусторонней стрелкой 32. В проиллюстрированном варианте осуществления для передвижения верхнего и нижнего порталов 22 и 24 соответственно на направляющих 18 и 20 используется система цепного привода. Ведущие звездочки приводных механизмов 28 и 30 на противоположных сторонах платформы 12 соединены осями 34 и 36 соответственно. Несмотря на то, что для передвижения верхнего и нижнего порталов 22 и 24 в виде иллюстрации используется цепной приводной механизм, должно быть понятно, что в других вариантах осуществления также могут использоваться другие типы приводных механизмов, такие как канатные приводы или другие механические приводы.
[0031] В проиллюстрированном варианте осуществления отверстия 14 платформы 12 расположены поперек платформы 12 во множестве рядов 38. Как лучше всего показано на фиг. 3, каждый ряд 38 отверстий 14 простирается в направлении поперек продольной оси 13 платформы 12. В проиллюстрированном варианте осуществления платформа 12 содержит 44 ряда с 20 отверстиями 14 в каждом ряду. Однако в соответствии с представленным раскрытием может использоваться любое желательное количество рядов и отверстий на ряд.
[0032] Как показано на фиг. 3, каждое из отверстий 14 содержит установочный паз 40, выходящий с одной стороны отверстия 14, для выравнивания сосуда 16 с правильной ориентацией внутри отверстий 14 для орошения, как обсуждается ниже. Фиг. 3 иллюстрирует несколько рядов 38, имеющих в них сосуды 16, и несколько рядов 38 без сосудов, расположенных внутри отверстий 14.
[0033] Верхний портал 22 в виде иллюстрации содержит разделенные промежутком подвижные опоры или челночные элементы 42, которые ездят на верхних направляющих элементах 18, как лучше всего показано на фиг. 3. В проиллюстрированном варианте осуществления челночные элементы 42 скользят взад и вперед по направляющим 18. Челночные элементы 42, если необходимо, могут содержать ролики для облегчения перемещения верхнего портала 22 взад и вперед в направлении двусторонней стрелки 32. Верхний портал 22 также содержит разделенные промежутком вертикальные опоры 44, соединенные с челночными элементами 42, и горизонтальную опору 46, простирающуюся поверх платформы 12 между разделенными промежутком вертикальными опорами 44.
[0034] Универсальный установочный блок 48 соединен с направляющей 49, предоставленной на горизонтальной опоре 46. Как лучше всего показано на фиг. 3, приводной механизм 50, такой как цепной привод, используется для передвижения универсального установочного блока 48 взад и вперед в направлении двусторонней стрелки 52 в направлении поперек продольной оси 13 опорной платформы 12. Вследствие этого приводной механизм 50 передвигает универсальный установочный блок 48 взад и вперед поверх рядов 38 сосудов 16.
[0035] В проиллюстрированном варианте осуществления, как показано на фиг. 14, с универсальным установочным блоком 48 соединены, например, камера 54 и температурный датчик 56. Камера 54 предоставляет неподвижные изображения или видеоизображения растений, выращиваемых в сосудах 16 в процессе эксперимента. В одном варианте осуществления камерой 54 является веб-камера, которая предоставляет изображения в удаленное место по коммуникационной сети. В проиллюстрированном варианте осуществления температурным датчиком 56 является инфракрасная камера для предоставления тепловых изображений растений в сосудах 16 в процессе эксперимента. В одном проиллюстрированном варианте осуществления в качестве температурного датчика 56 используется система инфракрасных камер модели A320, предлагаемая FLIR Systems. В универсальном установочном блоке 48 также могут быть установлены другие датчики для количественного определения уровня стресса растений и/или характеристик листового полога.
[0036] Как обсуждается ниже, для управления передвижением в процессе эксперимента верхнего портала 22 и универсального установочного блока 48 используется контроллер 100 системы. Приводной механизм 28 передвигает верхний портал 22 взад и вперед в направлении двусторонней стрелки 32 для выравнивания горизонтальной опоры 46 верхнего портала 22 с необходимым рядом 38 сосудов 16. Затем приводной механизм 50 передвигает универсальный установочный блок 48 взад и вперед в направлении двусторонней стрелки 52 на фиг. 1 и 3 поверх конкретного ряда 38 для предоставления визуальных и тепловых изображений, например, камерой 54 и температурным датчиком 56 соответственно.
[0037] Детали нижнего портала 24 лучше всего показаны на фиг. 4 и 5. Нижний портал 24 содержит первую и вторую движущиеся опоры или челночные элементы 60, соединенные с возможностью скольжения с разделенными промежутком нижними направляющими 20, как лучше всего показано на фиг. 4. В проиллюстрированном варианте осуществления челночные элементы 60 скользят на направляющей 20 взад и вперед. Если необходимо, челночные элементы 60 могут содержать ролики. Приводной механизм 30 передвигает нижний портал 24 взад и вперед в направлении двусторонней стрелки 32 вдоль продольной оси 13 платформы 12. Нижний портал 24 содержит пару вертикальных опорных элементов 62, соединенный с челночными элементами 60 и горизонтальной опорой 64, простирающейся между вертикальными опорными элементами 62.
[0038] С горизонтальной опорой 64 нижнего портала 24 соединен ряд динамометрических модулей 66. Количество динамометрических модулей 66 равно количеству отверстий 14 внутри каждого ряда 38 опорной платформы 12. Приводной механизм 30 передвигает нижний портал 24 таким образом, чтобы ряд динамометрических модулей 66 был выровнен непосредственно под рядом 38 сосудов 16 внутри отверстий 14 платформы 12. Как обсуждается ниже, в процессе передвижения нижнего портала 24 динамометрические модули 66 изначально отделены промежутком от нижних поверхностей сосудов 16. После того, как нижний портал 24 располагается под конкретным рядом 38 сосудов 16, опорные поверхности 86 для сосудов динамометрических модулей 66 передвигаются вверх для зацепления нижних поверхностей сосудов 16 и поднимают сосуды 16. Динамометрические модули 66 поднимают сосуды 16 для того, чтобы по отдельности взвесить каждый сосуд 16. Как дополнительно обсуждается ниже, затем можно при необходимости подавать воду через динамометрические модули 66 в нижние отверстия сосудов 16 для повторного орошения в сосудах 16 в процессе эксперимента. Вследствие этого система 10 платформы гравиметрического скрининга и способ представленного раскрытия сохраняют сосуды 16 на протяжении эксперимента в стационарных местоположениях без необходимости передвижения сосудов 16 в другое местоположение для взвешивания, тестирования и повторного орошения. Несмотря на то, что в проиллюстрированных вариантах осуществления за один раз поднимается один ряд 38 сосудов, в других вариантах осуществления одновременно может подниматься множество рядов 38.
[0039] На фиг. 6-9 проиллюстрированы детали динамометрических модулей 66. Как лучше всего показано на фиг. 8 и 9, нижний цилиндр 70 содержит внутреннюю камеру 72. Подвижный поршень 74 содержит пластину 76, расположенную внутри камеры 72. Линии 78 и 80 подачи текучей среды соединены с камерой 70 для избирательной подачи текучей среды, такой как сжатый воздух или гидравлическая жидкость, во внутреннюю камеру 72 цилиндра 70. Цилиндр 70 соединен с горизонтальной опорой 64 нижнего портала 24. Фиг. 8 показывает поршень 74 во втянутом положении, в котором опора 86 сосуда модуля 66 отделена промежутком от нижней части 82 сосуда 16, когда нижний портал 24 движется для выравнивания динамометрических модулей 66 с рядом 38 сосудов 16.
[0040] На фиг. 9 сжатый воздух из воздушного компрессора 214 и подводящей магистрали или коллектора 215 подается через впуск 78 для передвижения поршня 74 и пластины 76 вверх в направлении стрелки 84 с целью поднятия динамометрического модуля 66 вверх. Предпочтительно с коллектором 215 соединен один или более регуляторов. Вследствие этого опора 86 сосуда также передвигается вверх в направлении стрелки 84 в зацепление с нижней поверхностью 82 сосуда 16 и поднимает сосуд 16 вверх таким образом, чтобы сосуд 16 поддерживался опорой 86. Динамометрические модули 66 содержат тензодатчик 88, имеющий первый конец, соединенный с основанием 90 крепежными приспособлениями 92. Опора 86 сосуда соединена с противоположным концом тензодатчика 88 соединительным элементом 94 и крепежными приспособлениями 96 и 98.
[0041] После того как сосуд 16 поднят и поддерживается опорой 86, тензодатчик 88 взвешивает сосуд 16. Контроллер 100, соединенный с тензодатчикомом 88 соединительными элементами 89, сравнивает фактическую массу сосуда 16 с желательной массой сосуда 16 для протокола конкретного эксперимента. Контроллер 100 рассчитывает разницу между фактическим содержанием воды в каждом сосуде 16 и желательным содержанием воды в сосуде 16 на основании предварительно заданной программы дефицита воды конкретного эксперимента.
[0042] Если контроллер 100 определяет, что в сосуд 16 необходимо добавить воды, воду можно добавить непосредственно через динамометрический модуль 66 без перемещения сосуда 16 в другое место. Как показано на фиг. 7 и 8, трубопровод 102 подачи воды соединен с первым и вторым клапанами 120 и 122 регулирования потока через трубы 124, 126 и 128. Труба 130 подсоединена между клапаном 120 и соединительным элементом 104. Труба 132 подсоединена между клапаном 122 и соединительным элементом 104. С водопроводом 212 соединен трубопровод 102 подачи воды. С отверстием 106 в опоре 86 соединен соединительный элемент 104, лучше всего показанный на фиг. 8 и 9.
[0043] В проиллюстрированном варианте осуществления клапан 120 регулирования потока предоставляет «грубый» поток текучей среды, тогда как клапан 122 регулирования потока предоставляет «точный» поток текучей среды. В одном проиллюстрированном варианте осуществления поток текучей среды через клапан 120 грубого регулирования потока приблизительно в десять раз больше, чем поток текучей среды через клапан 122 точного регулирования потока, хотя может использоваться любое желательное соотношение. Во время работы контроллер 100 сначала открывает клапаны 120 и 122 как грубого, так и точного регулирования потока для начала наполнения или внесения подкормки в сосуды 16. Когда масса сосудов приближается к желательной массе для конкретного эксперимента, контроллер 100 выключает клапан 120 грубого регулирования потока и завершает операцию наполнения, используя клапан 122 точного регулирования потока для точного регулирования количества воды, добавляемой в сосуд 16.
[0044] В проиллюстрированном варианте осуществления верхняя поверхность опоры 86 покрыта силиконовой прокладкой 108 для улучшения герметизации между нижней поверхностью 82 сосуда 16 и прокладкой 108 на верхней поверхности опоры 86 для того, чтобы в сосуд 16 могла подаваться вода. В проиллюстрированном варианте осуществления из верхней поверхности опоры 86 вверх выступают штыри 112 для удерживания силиконовой прокладки 108 на своем месте на верхней поверхности опоры 86. Прокладка 108 содержит отверстие 114, выровненное с отверстием 106 опоры 86 для того, чтобы вода могла протекать через прокладку 108 и в сосуд 16. Несмотря на то, что в одном варианте осуществления для прокладки 108 используется силикон, также можно использовать другие соответствующие материалы. Опора 86 динамометрического модуля 66 также содержит канавку или вырезанный участок 110, который выполнен с возможностью сбора воды и отвода воды от электрических составных частей динамометрического модуля 66.
[0045] На фиг. 10-13 показаны детали иллюстративного варианта осуществления сосуда 16. Сосуд 16 содержит корпусную часть 140, которая имеет в общем цилиндрическую форму. Корпусная часть 140 сосуда 16 выполнена с возможностью вставки внутрь отверстий 14 платформы 12 с достаточным зазором для того, чтобы, когда динамометрический модуль 66 поднимает сосуд 16, сосуд 16 полностью поддерживался опорой 86 динамометрического модуля 66, обеспечивая точное взвешивание сосуда 16. Верхний конец 142 сосуда 16 содержит отверстие 144 для введения почвы и семян или растений в сосуд 16 и предоставления растению возможности (не показано) расти наружу из сосуда 16 традиционным образом. Верхний конец 142 содержит торцевую крышку 146, имеющую наружный фланец 148, выполненный с возможностью зацепления верхней поверхности опорной платформы 12, когда сосуд 16 загружают в отверстие 14. Противоположные стороны 149 фланца 148 изогнуты для облегчения загрузки и выгрузки сосудов 16 с платформы 12.
[0046] Также на торцевой крышке 146 образована выравнивающая лапка 150. Выравнивающая лапка 150 выполнена с возможностью выравнивания с пазом 40 отверстий 14 для того, чтобы сосуд 16 располагался на опорной платформе 12 с правильной ориентацией для взвешивания и повторного орошения. Сосуд 16 содержит внутренний резервуар 152 для воды, содержащий нижнюю часть 153 и множество разделенных промежутками вертикальных каналов 154 для текучей среды для приема в них воды. Как показано на фиг. 12, нижний конец 82 сосуда 16 содержит множество ребер 156 и резьбовых установочных элементов 158. Внутри кольцевой канавки 162 расположено уплотнительное кольцо 160, окружающее нижний конец 82 сосуда 16. Торцевая крышка 164 соединена с нижним концом 82 крепежными приспособлениями 156, которые выступают через уплотнительные кольца 168 и отверстия 169 в крышке 164 и входят в зацепление с резьбовыми установочными элементами 158.
[0047] В проиллюстрированном варианте осуществления с отверстием 172, образованным в нижней пластине 164, соединен обратный клапан 170. В виде иллюстрации с отверстием 172 с помощью кольцевой уплотнительной прокладки 178 соединены диафрагма 174 и зонтичный клапан 176. Как лучше всего показано на фиг. 8 и 9, кольцевая уплотнительная прокладка 178 расположена под нижней поверхностью 82 сосуда 16 для сцепления с силиконовой прокладкой 108 на верхней поверхности опоры 86 с целью предоставления уплотнения между отверстием 72 и прокладкой 108 на верхней поверхности опоры 86.
[0048] Как лучше всего показано на фиг. 9, за счет помещения лапок 150 сосудов 16 в пазы 40 отверстий 14 отверстия 172 в резервуарах 152 сосудов 16 автоматически выравниваются с отверстиями 106 в опорах 86 динамометрических модулей 66. Вследствие этого, когда сосуд 16 поднят, как показано на фиг. 9, между отверстием 106 в опоре 86 и отверстием 172 торцевой крышки 164 в нижнем конце 82 сосуда 16 автоматически устанавливается соединение с возможностью прохождения текучей среды. Когда контроллер 100 за счет открывания клапанов 120, 122 заставляет воду протекать, вода течет вверх через соединительный элемент 104, через отверстие 106 опоры 86, через диафрагму 174 и мимо обратного клапана 176 в резервуар 152 сосуда 16. На фиг. 9 поток текучей среды иллюстративно показан стрелкой 184. Также, как проиллюстрировано на фиг. 9, текучая среда течет в направлении стрелок 188 вверх из нижней части 153 резервуара 152 через отверстия 186, которые находятся в сообщении с возможностью прохождения текучей среды с вертикальными каналами 154 для текучей среды. Если наступает состояние переполнения, для отвода воды каналы 154 содержат верхние отверстия 155, расположенные около верхнего конца 142. Как лучше всего проиллюстрировано на фиг. 8, 9 и 13, внутренние каналы 154 для текучей среды содержат внутреннюю сетку 190 из синтетической ткани, образующую внутреннюю часть каналов 154. Сетка 190 позволяет воде протекать через сетку, но предотвращает накапливание почвы, мусора или корней растений в вертикальных каналах 154 резервуара 152. Съемная сливная пробка 194 и уплотнительное кольцо 196 уплотняют сливное отверстие 198 торцевой крышки 164. Резервуар 152 осушают за счет удаления сливной пробки 194.
[0049] В еще одном проиллюстрированном варианте осуществления сосуда 16 резервуар 152 находится в сообщении с возможностью прохождения текучей среды с трубкой или каналом (не показано), который доставляет воду из резервуара 152 в верхний конец 142 сосуда 16 для полива сверху растения в сосуде. В данном варианте осуществления сосуд 16 обычно не содержит каналы 154 для текучей среды или сетку 190. В еще одном варианте осуществления сетка 190 заменена водопроницаемым материалом для того, чтобы вода текла вверх из резервуара 152 по каналам 154 в направлении стрелок 188 в верхние отверстия (не показано) рядом с верхним концом 142 сосуда 16 для обеспечения полива растения в сосуде сверху через каналы 154.
[0050] Во время работы сосуды 16 наполняют почвой, семенами и/или растениями, как необходимо для конкретного эксперимента, и загружают в отверстия 14 опорной платформы 12. Лапки 150 сосудов 16 выравнивают с пазами 40 отверстий 14. Как лучше всего показано на фиг. 3, загрузочная платформа 200 содержит подвижные опоры 202, соединенные с верхней направляющей 18. Опоры 202 соединены с горизонтальной опорой 204, которая поддерживает складные панели 206. В одном варианте осуществления загрузочная платформа 200 передвигается приводным механизмом взад и вперед в направлении двусторонней стрелки 32 вдоль продольной оси 13 платформы 12. В еще одном проиллюстрированном варианте осуществления загрузочная платформа 200 соединена с верхним порталом 22 соединительными рычагами. Вследствие этого верхний портал 22 используется для передвижения загрузочной платформы 200 взад и вперед на платформе 12 для облегчения загрузки сосудов 16 в отверстия 14. Один вариант осуществления облегчает загрузку и выгрузку сосудов 16 в конце опорной платформы 12. Также в иллюстративном варианте осуществления складные панели 206 обеспечивают возможность загрузки и выгрузки сосудов 16 на более эргономичном, более низком уровне, чем полная высота опорной платформы 12.
[0051] Центральный участок 208 загрузочной платформы 200 открывается, раскрывая ряд 38 отверстий 14. После того как загрузочная платформа 200 располагается поверх конкретного ряда 38, боковые панели 206 складываются вниз, перекрывая соседние ряды 38 отверстий 14. Вследствие этого оператор может ходить по панелям 206 для облегчения загрузки или выгрузки сосудов 16 из отверстий 14 раскрытого ряда 38. После того как один ряд 38 загружают сосудами 16, загрузочная платформа 200 движется к следующему ряду 38. В виде иллюстрации перед перемещением загрузочной платформы 200 панели 208 складывают вверх.
[0052] После того как все сосуды 16 загружены на опорную платформу 12, оператор выбирает конкретный протокол эксперимента. Можно выбирать эксперимент и следить за ним, используя графический пользовательский интерфейс (GUI) 210. GUI 210 показан на фиг. 1-3 в виде сенсорного экрана. Однако GUI 210 может включать любой тип пользовательского интерфейса.
[0053] Далее работа платформенной системы 10 гравиметрического скрининга и способ будут описаны в сочетании с фиг. 14 и 15. После того как были загружены сосуды 16 и с использованием графического пользовательского интерфейса 210 был выбран конкретный протокол эксперимента, контроллер 100 автоматически управляет перемещением верхнего портала 22, нижнего портала 24 и универсального установочного блока 48 относительно опорной платформы 12. Контроллер 100 также управляет подачей в динамометрический модуль 66, соединенный с нижним порталом 24, воды из водопровода 212 и сжатого воздуха из воздушного компрессора 214.
[0054] Далее со ссылкой на фиг. 15 в блоке 220 начинается процесс эксперимента. В начале процесса верхний и нижний порталы 22 и 24 в виде иллюстрации расположены около одного конца опорной платформы 12. Порталы 22 и 24 передвигаются до выравнивания со следующим рядом 38 отверстий 14 и сосудов 16, как проиллюстрировано в блоке 222. Затем контроллер 100 управляет перемещением универсального установочного блока 48 на горизонтальной опоре 46 верхнего портала 22. Контроллер 100 делает изображения растений в сосудах 16, используя камеру 54, и снимает показания температуры, используя инфракрасную сенсорную камеру 56, по мере того как универсальный установочный блок 48 передвигает камеры 54, 56 взад и вперед поверх растений в пределах конкретного ряда 38, как проиллюстрировано в блоке 224. В проиллюстрированном варианте осуществления камера 54 и температурный датчик 56 расположены в пределах теплозащитного ограждения для того, чтобы камеры 54 и 56 не повреждались теплом, подаваемым внутрь теплицы. Данные от камер 54, 56 и любых других датчиков сохраняются в памяти 101 контроллером 100.
[0055] После того, как нижний портал 24 передвигается в положение под конкретным рядом 38, контроллер 100 управляет подачей сжатого воздуха из пневматической сети 214 в цилиндры 70 для подъема каждого из множества динамометрических модулей 66 из втянутого положения фиг. 8 в выдвинутое положение фиг. 9 для подъема вверх каждого сосуда 16 в ряду 38, как проиллюстрировано в блоке 226. Как обсуждалось выше, сосуды 16 полностью поддерживаются опорами 86 динамометрических модулей 66 в выдвинутых положениях.
[0056] Затем контроллер 100 взвешивает каждый сосуд, как проиллюстрировано в блоке 228, и сохраняет в памяти 101 информацию о массе каждого сосуда 16. Далее контроллер 100 определяет, имеется ли необходимость в добавлении воды в какой-либо из сосудов 16, как проиллюстрировано в блоке 230. Если необходимость добавления воды отсутствует, контроллер 100 переходит в блок 234 фиг. 15. Если в блоке 230 необходимо добавить воду, контроллер 100 регулирует клапаны 120, 122 на подачу воды из водопровода 212 через динамометрические модули 66 в сосуды 16, как обсуждалось подробно выше. Вода добавляется до тех пор, пока масса сосудов не достигнет необходимой массы для конкретного эксперимента, как проиллюстрировано в блоке 232. Новая масса сосудов, принятая после повторного орошения, сохраняется в памяти 101. Далее, контроллер 100 регулирует подачу 214 воздуха для передвижения поршней 74 динамометрического модуля 66 из выдвинутого положения фиг. 9 назад во втянутое положение фиг. 8, как проиллюстрировано в блоке 234. В данном положении сосуды 16 снова поддерживаются фланцами 148, которые входят в зацепление с опорной платформой 12.
[0057] Затем контроллер 100 определяет, является ли конкретный ряд 38 последним рядом 38 на опорной платформе 12, как проиллюстрировано в блоке 236. Если так, контроллер 100 передвигает верхний и нижний порталы 22 и 24 назад в исходное положение, как проиллюстрировано в блоке 238. Если в блоке 236 ряд не был последним рядом, в блоке 222 контроллер 100 передвигает верхний и нижний порталы 22, 24 в следующий ряд 38, а затем продолжает оставшиеся стадии фиг. 15 для следующего ряда 38.
[0058] Во время процесса повторного орошения в почву, если необходимо, можно добавлять питательные вещества. В дополнение воду можно использовать для вымывания питательных веществ из сосудов 16 путем переполнения резервуаров и предоставления воде возможности выходить через переливные отверстия 155. Можно проводить эксперименты по эффективности использования азота (NUE).
[0059] Как лучше всего показано на фиг. 1-3, внешние датчики 240 и 242 создают световые барьеры для выявления движения около системы 10. Если детекторы 240 и 242 выявляют подобное движение, контроллер 100 выключает работу системы 10. После того как область освобождается, контроллер 100 начинается процесс снова на той же самой стадии в процессе.
[0060] Раскрытие предварительной патентной заявки, серийный № 61/476055, поданной 15 апреля 2011 года, явным образом включено в данную заявку посредством ссылки.
[0061] Несмотря на то, что варианты осуществления представленного раскрытия были описаны с наличием иллюстративных конструкций, представленное изобретение может быть дополнительно модифицировано в пределах сущности и объема правовых притязаний данного раскрытия. Вследствие этого данная заявка предполагает охват любых вариантов, использований или приспосабливаний раскрытия с использованием его общих принципов. Кроме того, данная заявка предполагает охват таких отклонений от представленного раскрытия, которые попадают в пределы известной или общепринятой практики в области, к которой относится данное изобретение.


Автоматизированная система гравиметрического скрининга и способ управляют влажностью почвы у множества горшечных растений для проведения экспериментов по нехватке воды в теплице с использованием стационарной опорной платформы и конструкции сосуда, которые сохраняют растения в неподвижном положении в процессе тестирования. Посредством взвешивания и повторного орошения сосудов из-под платформы представленная система и способ позволяют верхнему порталу делать изображения высокого разрешения, собирать данные о температуре или данные от других датчиков для количественного определения уровня стресса растений или характеристик листового полога растений в процессе эксперимента. 3 н. и 27 з.п. ф-лы, 15 ил.
1. Система для регулирования влажности почвы у множества горшечных растений для проведения экспериментов по нехватке воды, при этом система содержит:
стационарную платформу, имеющую множество отверстий, образованных в ней, при этом отверстия расположены на платформе во множестве рядов;
множество сосудов, расположенных во множестве отверстий в платформе, при этом сосуды поддерживаются платформой;
подвижный нижний портал, расположенный под платформой, при этом подвижный нижний портал поддерживает множество динамометрических модулей, выровненных с множеством сосудов, расположенных в ряду отверстий, причем каждый динамометрический модуль содержит тензодатчик, имеющий опору, способную передвигаться из втянутого положения, отделенного промежутком от нижней поверхности сосуда, в выдвинутое положение, в котором опора тензодатчика поднимает сосуд вверх для поддержки на ней массы сосуда, при этом тензодатчик взвешивает поднятый сосуд;
контроллер, соединенный с тензодатчиком, при этом контроллер запрограммирован определять, нуждаются ли сосуды в орошении на основании массы сосудов и эксперимента по нехватке воды; и
водопровод, соединенный с динамометрическим модулем, при этом водопровод содержит по меньшей мере один клапан регулирования потока, управляемый контроллером, для избирательной подачи воды через динамометрический модуль в сосуд.
2. Система по п. 1, дополнительно содержащая верхний портал, передвигающийся над платформой, при этом верхний портал содержит по меньшей мере один датчик, расположенный на нем, для получения данных, связанных с растениями во множестве сосудов.
3. Система по п. 2, в которой по меньшей мере датчик на верхнем портале содержит камеру для получения изображений растений во множестве сосудов.
4. Система по п. 2, в которой по меньшей мере датчик на верхнем портале представляет собой температурный датчик.
5. Система по п. 4, в которой температурным датчиком является инфракрасная камера.
6. Система по п. 2, в которой верхний портал содержит приводной механизм, который передвигает по меньшей мере один датчик на верхнем портале взад и вперед поверх рядов сосудов, расположенных внутри отверстий платформы.
7. Система по п. 2, в которой верхний портал содержит первый и второй разделенные промежутком челночные элементы, соединенные с разделенными промежутком верхними направляющими, расположенными на противоположных сторонах платформы, для предоставления возможности перемещения верхнего портала поверх платформы, первую и вторую разнесенные вертикальные опоры, соединенные с первым и вторым челночными элементами соответственно, и горизонтальную опору, простирающуюся поверх платформы между первой и второй разнесенными вертикальными опорами верхнего портала, при этом с горизонтальной опорой верхнего портала соединен по меньшей мере один датчик.
8. Система по п. 1, в которой нижний портал содержит первый и второй разделенные промежутком челночные элементы, соединенные с разделенными промежутком нижними направляющими, расположенными на противоположных сторонах платформы, для предоставления возможности перемещения нижнего портала под платформой, первую и вторую разнесенные вертикальные опоры, соединенные с первым и вторым челночными элементами соответственно, и горизонтальную опору, простирающуюся под платформой между первой и второй разнесенными вертикальными опорами нижнего портала, при этом с горизонтальной опорой нижнего портала соединено множество динамометрических модулей.
9. Система по п. 8, в которой горизонтальная опора нижнего портала поддерживает трубопровод подачи текучей среды, соединенный с динамометрическими модулями, для избирательного выдвижения и втягивания опор динамометрических модулей, и трубопровод подачи воды, соединенный с динамометрическими модулями, для подачи воды в сосуды через динамометрические модули.
10. Система по п. 9, в которой опоры динамометрических модулей содержат отверстие в жидкостном сообщении с трубопроводом подачи воды и в которой каждый из множества сосудов содержит резервуар для текучей среды, имеющий заливное отверстие, расположенное на нижней поверхности сосуда, и обратный клапан, соединенный с заливным отверстием, для предоставления возможности поступления воды, подаваемой через отверстие опоры динамометрического модуля, в заливное отверстие сосуда через обратный клапан.
11. Система по п. 10, в которой резервуар для текучей среды каждого сосуда содержит нижнюю часть в сообщении с заливным отверстием и множество вертикально расположенных каналов для текучей среды для подачи воды в почву внутри сосуда.
12. Система по п. 11, дополнительно содержащая сетку, образующую внутреннюю часть вертикально расположенных каналов для текучей среды, при этом сетка обеспечивает возможность протекания воды через сетку в почву, но предотвращает накапливание почвенного мусора и корней растений в вертикально проходящих каналах для текучей среды резервуара.
13. Система по п. 11, дополнительно содержащая переливное отверстие в сообщении с каждым из каналов для текучей среды, при этом переливные отверстия расположены около верхнего конца сосуда.
14. Система по п. 10, в которой заливные отверстия сосудов смещены от центральной оси сосудов и в которой каждый сосуд содержит выравнивающую лапку, выполненную с возможностью расположения внутри вырезанного участка отверстия, образованного в платформе, для выравнивания заливного отверстия сосуда с водопроводным отверстием в опоре динамометрического модуля.
15. Система по п. 10, дополнительно содержащая прокладку, расположенную на опоре каждого динамометрического модуля, при этом прокладка улучшает герметичность между заливным отверстием сосуда и водопроводным отверстием, образованным в опоре динамометрического модуля.
16. Система по п. 15, в которой прокладка содержит отверстие, выровненное с водопроводным отверстием в опоре динамометрического модуля.
17. Система по п. 16, в которой опора динамометрического модуля содержит множество штырей, выполненных с возможностью выравнивания прокладки на опоре.
18. Система по п. 1, в которой опора динамометрического модуля содержит вырезанный участок, выполненный с возможностью отведения текучей среды с опоры.
19. Система по п. 1, в которой каждый динамометрический модуль содержит цилиндр и поршень, расположенный в цилиндре, при этом поршень соединен с тензодатчиком и может передвигаться между втянутым положением и выдвинутым положением для передвижения тензодатчика и опоры из втянутого положения, отделенного промежутком от нижней поверхности сосуда, в выдвинутое положение, в котором опора тензодатчика поднимает сосуд вверх для поддержки на ней массы сосуда.
20. Система по п. 1, в которой каждый сосуд содержит имеющую цилиндрическую форму корпусную часть и фланец, расположенный на верхнем конце сосуда, при этом фланец выполнен с возможностью зацепления платформы, когда корпусную часть сосуда вставляют в отверстие в платформе для поддержки сосуда на платформе.
21. Система по п. 1, дополнительно содержащая загрузочную платформу, подвижную относительно стационарной платформы, при этом загрузочная платформа содержит по меньшей мере одну складную панель, выполненную с возможностью расположения над множеством рядов отверстий платформы для облегчения загрузки сосудов в отверстия, расположенные рядом со складной панелью.
22. Система по п. 1, в которой водопровод соединен с динамометрическим модулем с помощью первого и второго клапанов регулирования потока, при этом первый клапан регулирования потока имеет скорость потока текучей среды больше, чем у второго клапана регулирования потока, и в которой контроллер сначала открывает первый и второй клапаны регулирования потока для начала наполнения сосудов, причем контроллер закрывает первый клапан регулирования потока, когда масса сосудов приближается к желательной для эксперимента по нехватке воды массе, и завершает наполнение сосуда со вторым клапаном регулирования потока для точного регулирования количества воды, добавляемой в сосуд.
23. Способ регулирования влажности почвы у множества горшечных растений для проведения экспериментов по нехватке воды, при этом способ включает:
предоставление стационарной платформы, имеющей множество отверстий в ней;
расположение множества сосудов в отверстиях платформы, при этом сосуды поддерживаются платформой;
поднимание сосудов с множеством динамометрических модулей;
взвешивание каждого из множества сосудов динамометрическими модулями;
определение, нуждаются ли сосуды в орошении на основании массы сосудов и эксперимента по нехватке воды;
орошение сосудов через динамометрические модули, если необходимо, на основании стадии определения; и
опускание множества динамометрических модулей таким образом, чтобы множество сосудов поддерживалось платформой.
24. Способ по п. 23, в котором отверстия в платформе расположены во множестве рядов, на стадии передвижения множества динамометрических модулей под платформой динамометрические модули выравниваются с рядом сосудов, а на стадии подъема сосудов ряд сосудов поднимается целиком одновременно с множеством динамометрических модулей.
25. Способ по п. 24, дополнительно включающий передвижение динамометрических модулей к следующему ряду сосудов и выполнение стадий подъема, взвешивания, определения, орошения и опускания для следующего ряда сосудов.
26. Способ по п. 23, дополнительно включающий передвижение по меньшей мере одного датчика поверх рядов сосудов для сбора данных, связанных с растениями.
27. Сосуд для использования с системой для регулирования влажности почвы у множества горшечных растений для проведения экспериментов по нехватке воды, при этом система содержит стационарную платформу, имеющую множество образованных в ней отверстий, при этом сосуд содержит:
корпусную часть, имеющую открытый верхний конец и нижний конец;
фланец, соединенный с корпусной частью рядом с верхним концом, при этом фланец выполнен с возможностью зацепления платформы для удерживания корпусной части внутри отверстия платформы;
резервуар для текучей среды, имеющий нижнюю часть, расположенную рядом с нижним концом корпусной части, множество вертикально расположенных каналов для текучей среды, тянущихся вверх в направлении верхнего конца корпусной части, и заливное отверстие, расположенное в нижнем конце корпусной части в сообщении с нижней частью резервуара для текучей среды; и
обратный клапан, соединенный с заливным отверстием для предоставления текучей среды, подлежащей подаче в резервуар для текучей среды из нижнего конца корпусной части через заливное отверстие и обратный клапан.
28. Сосуд по п. 27, дополнительно содержащий сетку, образующую внутреннюю часть вертикально расположенных каналов для текучей среды, при этом сетка обеспечивает возможность протекания текучей среды через сетку в почву внутри корпусной части, но предотвращает накапливание почвенного мусора и корней растений в вертикально расположенных каналах для текучей среды резервуара.
29. Сосуд по п. 27, дополнительно содержащий переливное отверстие в сообщении с каждым из каналов для текучей среды, при этом переливные отверстия расположены около верхнего конца корпусной части.
30. Сосуд по п. 27, в котором заливные отверстия смещены от центральной оси корпусной части, и дополнительно содержащий выравнивающую лапку, расположенную около верхнего конца корпусной части, при этом выравнивающая лапка выполнена с возможностью расположения внутри вырезанного участка отверстия, образованного в платформе, для выравнивания заливного отверстия с водопроводом.
| СПОСОБ ПОЛУЧЕНИЯ у-АЛКОКСИКЕТОНОВ ИЛИ 6-ОКСИКЕТОНОВ | 0 |
|
SU285919A1 |
| Устройство для полива растений | 1978 |
|
SU952167A1 |
| Приспособление для суммирования отрезков прямых линий | 1923 |
|
SU2010A1 |
| US 5852896 A, 29.12.1998. | |||

