Изобретение относится к сельскому хозяйству, в частности к орошаемому земледелию, и может быть использовано для орошения полей различной конфигурации преимущественно дождевальными машинами кругового действия.
Известен способ перемещения многоопорных дождевальных машин кругового действия моделей «Фрегат», «Кубань-ЛК», «Valley» и др. (Гусейн-Заде, С.X. Многоопорные дождевальные машины / С.X. Гусейн-Заде, Л.А. Перевезенцев, В.И. Каваленко, В.Г. Луцкий. - М.: Колос, 1984. - С.151-154) с началом движения по кругу вращением вокруг вертикальной оси симметрии гидранта или по часовой или против часовой стрелки с возвратом на технологическую дорогу и последующим перемещением водопроводящего трубопровода энергетическим средством на колесах опорных тележек путем их поворота в процессе перемещения на 90° до следующего гидранта в закрытой водопроводящей сети.
К недостаткам описанного способа перемещения многоопорных дождевальных машин кругового действия (реверсивных с электроприводом и нереверсивных с гидроприводом) относятся большие трудозатраты на перемещение самой многоопорной дождевальной машины и ее установку в новое положение. Для орошаемых полей в Российской Федерации этот прием практически не используется. При поливе на квадратных полях остаются непреодолимые кольцевые канавы (колея) под опорными тележками водопроводящего трубопровода.
Известен способ вождения сельскохозяйственного агрегата (SU, А.с. №1482554, А01В 69/04, БИ №20 от 30.05.1989 г.), включающий нанесение следоуказателя на поверхность поля и последующее перемещение сельскохозяйственного агрегата по эквизистантному следоуказателю рядом, в котором, с целью повышения производительности обработки поля сложной формы агрегатом с постоянной шириной захвата за счет снижения числа разворотов агрегата, в качестве следоуказателя выбирают геодезическую линию поля, имеющую наибольшую длину.
К недостаткам описанного способа вождения сельскохозяйственного агрегата имеющего постоянную ширину захвата площади, применительно к решаемой нами технической задаче, относится то, что поля под орошение выбираются с уклонами не более 0,08 и не имеющие характерных геодезических линий, наличие таких орошаемых территорий составляет не более 3%.
Наиболее близким техническим решением является способ повышения проходимости многоопорных дождевальных машин путем уменьшения колееобразования (А.с. СССР №1386114, A01G 25/09, БИ №13 от 07.04.1988 г.), в котором с целью снижения энергозатрат на движение машин и предотвращения водной эрозии почвы самоходные опоры дождевальной машины сдвигают в сторону от гидранта по оси трубопровода и подключают трубопровод машины к гидранту посредством трубчатой вставки, отношение длины которой к ширине образуемой колеи принимают не менее 1,6.
К недостаткам описанного способа изменения траектории движения многоопорной дождевальной машины кругового действия относятся большие трудовые и материальные затраты на переустановку всей машины на новое положение и повторное колееобразование.
Задача, на решение которой направлено заявленное изобретение, - снижение колееобразования под опорными тележками водопроводящего трубопровода дождевальных машин кругового действия, равномерное распределение искусственного дождя по всей орошаемой площади.
Технический результат - повышение качества полива полей квадратной или прямоугольной конфигурации многоопорными дождевальными машинами кругового действия.
Технический результат достигается (вариант 1) тем, что в известном способе движения многоопорной дождевальной машины кругового действия (реверсивной) при поливе полей квадратной или прямоугольной конфигурации, включающем перемещение многоопорной дождевальной машины с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидранта. Согласно изобретению движение происходит по кругу от исходной позиции вокруг вертикальной оси симметрии гидранта, установленного в ряду гидрантов. При достижении удаленного от оси вращения конца водоподводящего трубопровода, работающего от второго гидранта, водопроводящий трубопровод совмещается с третьим гидрантом и, после подключения к нему, изменяет направление движения многоопорной дождевальной машины на противоположное. При совмещении удаленного конца водопроводящего трубопровода с последующим гидрантом в ряду вновь изменяется направление движения. После совмещения водопроводящего трубопровода с последним гидрантом водопроводящий трубопровод останавливают на краю поля и последующий отвод многоопорной дождевальной машины на исходную позицию к первому гидранту осуществляют в обратном порядке по орошаемому ранее массиву. Гидранты в ряду размещаются с взаимным удалением, равным ширине орошения полосы многоопорной дождевальной машины.
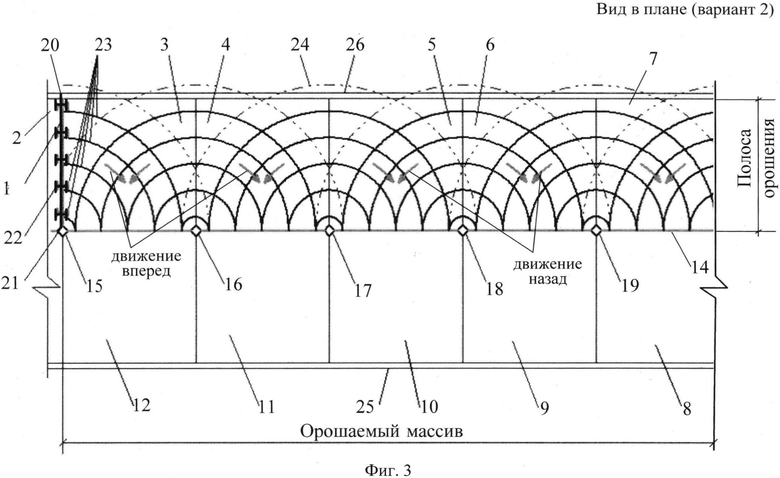
Технический результат достигается (вариант 2) тем, что в известном способе движения реверсивной многоопорной дождевальной машины кругового действия при поливе полей квадратной или прямоугольной конфигурации, включающем перемещение многоопорной дождевальной машины с постоянной шириной орошения по кругу вокруг вертикальной оси симметрии гидранта от исходной позиции вокруг первого гидранта, установленного в ряду гидрантов, и достижении удаленным от оси вращения концом водопроводящего трубопровода при подключении к последующим гидрантам сохраняется направление движения многоопорной дождевальной машины до последнего гидранта. Водопроводящий трубопровод останавливается на краю поля, и отвод многоопорной дождевальной машины в режиме полива на исходную позицию к первому гидранту осуществляется в обратном порядке по ранее орошаемому массиву, с изменением направления движения.
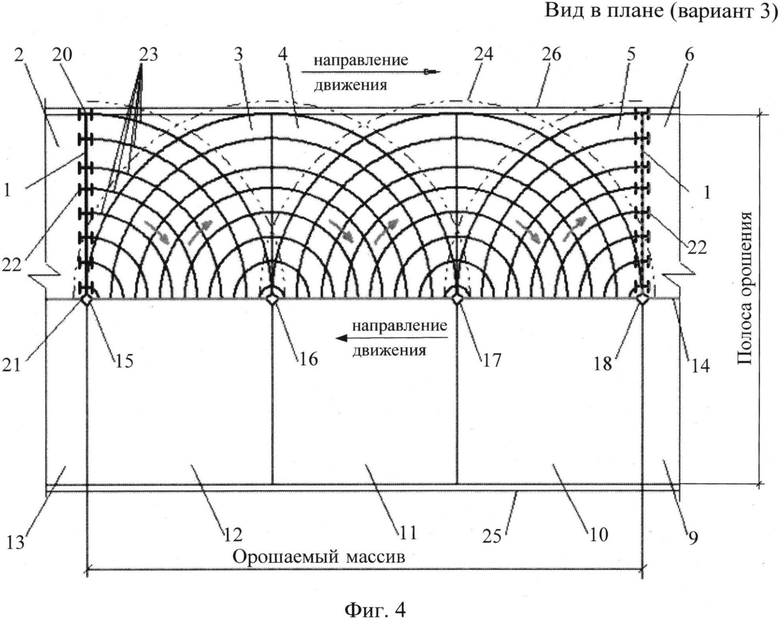
Технический результат достигается (вариант 3) тем, что движения многоопорной дождевальной машины кругового действия (нереверсивной) при поливе полей квадратной или прямоугольной конфигурации включают перемещение многоопорной дождевальной машины с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидрантов, сохраняя направление поворотов вокруг вертикальных осей симметрии от первого к последующим гидрантам, установленным в ряду гидрантов. Возврат многоопорной дождевальной машины кругового действия (нереверсивной) на исходную позицию производят указанным приемом по смежной, ранее не поливаемой полосе орошаемого поля.
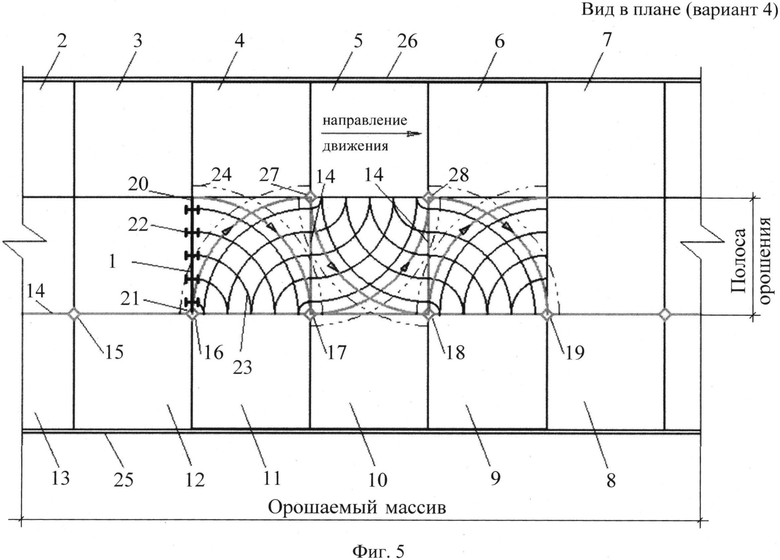
Технический результат достигается (вариант 4) тем, что многоопорная дождевальная машина кругового действия (реверсивная) при поливе полей квадратной или прямоугольной конфигурации, включающем перемещение ее с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидрантов, расположенных как на основной водопроводящей сети, так и вокруг дополнительных гидрантов, находящихся во втором параллельном первому ряду гидрантов, размещенных напротив, с удалением друг от друга на расстояние, равное постоянной ширине полосы орошения многоопорной дождевальной машины. Поворот водопроводящего трубопровода дождевальной машины по часовой стрелке производят вокруг вертикальных осей симметрии первой пары гидрантов первого ряда. Против часовой стрелки повторяют движение машины вновь вокруг вертикальных осей симметрии другой пары гидрантов второго ряда по общему направлению движения многоопорной дождевальной машины кругового действия.
Изобретение рекомендуется к использованию с многоопорными дождевальными машинами кругового действия, оснащенными дальнеструйными дождевальными аппаратами на концах водопроводящего трубопровода и возможностью подключения к гидранту с обоих концов. Длину дождевальной машины следует принимать равной ширине орошаемой полосы.
Изобретение поясняется чертежами (фиг.1÷5), варианты 1÷4.
На фиг. 1÷5 приведены четыре варианта способов движения многоопорной дождевальной машины кругового действия, включающие: многоопорную дождевальную машину 1; участки орошения 2÷13; водопроводящую сеть 14; гидранты 15÷19; удаленные от оси вращения концы водопроводящего трубопровода 20÷21; опорные тележки 22; колею 23; зону увлажнения дальнеструйными дождевателями 24; полевые дороги 25÷26; дополнительные гидранты 27÷28 (фиг. 5).
На фиг.1 (вариант 1) изображено на виде в плане движение многоопорной дождевальной машины (ДМ) 1 кругового действия (реверсивной) при поливе участков 2, 3, 4, 5, 6, 7, 8, 9, 10, 11, 12, 13 квадратной конфигурации или общего орошаемого массива прямоугольной конфигурации при последовательном перемещении водопроводящего трубопровода ДМ 1 на колесах опорных тележек 22 путем поворота водопроводящего трубопровода ДМ 1 вокруг вертикальной оси симметрии гидрантов 15, 16, 17, 18, 19, размещенных в ряду с взаимным удалением, равным длине ДМ и постоянной ширине полосы орошения. Водопроводящую сеть 14 размещают на глубине исключающей ее промерзание. Способ движения многоопорной дождевальной машины 1 кругового действия при поливе дождеванием, за счет размещения на водоподводящем трубопроводе среднеструйных дождевальных аппаратов и дальнеструйных на концах водопроводящего трубопровода, полей квадратной конфигурации 2÷13 включает перемещение многоопорной дождевальной машины 1 с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидранта 15, или 16, или 17, или 18, или 19. При поливе участков 2÷13 (вариант 1) движение выполняют из исходной позиции (между орошаемыми участками квадратной конфигурации 12 и 13) вокруг вертикальной оси симметрии первого гидранта 15, установленного в ряду гидрантов 15÷19. После того как удаленный от оси вращения конец 20 водопроводящего трубопровода совместится с гидрантом 16, произведут подключение к нему ДМ 1, направление движения сохранится на участках 13, 2 и 3. При совмещении удаленного конца 21 водопроводящего трубопровода дождевальной машины 1 с гидрантом 17 и подключением к нему изменяют направление движения на противоположное. При достижении последнего гидранта 19 водопроводящий трубопровод ДМ 1 останавливают на краю участками 8 (между орошаемыми участками 8 и 9).
Последующий отвод многоопорной дождевальной машины 1 на исходную позицию к первому гидранту 15 осуществляют в обратном направлении по ранее орошенному массиву (фиг 2).
При обратном проходе дождевальной машины 1 по ранее орошаемой полосе достигается минимальная глубина колеи 23 за счет того, что колесами опорных тележек прокладывается новая колея 23, а ранее вылитая вода при первом поливе впиталась в почву.
Наличие дальнеструйных дождевателей на концах 20 и 21 водопроводящего трубопровода и описанный способ движения многоопорной дождевальной машины обеспечивают равномерный полив всей поверхности поля. Зона увлажнения дальнеструйными дождевателями водопроводящего трубопровода ДМ 1 изображена штрихпунктирными линиями 24. При этом зона увлажнения минимально накрывает полотна полевых дорог 25 и 26.
На фиг.2 (вариант 1) показано движение при возвращении многоопорной дождевальной машины 1 кругового действия на исходную позицию к гидранту 15 и повторном поливе полосы орошания.
На фиг.3 (вариант 2) изображено на виде в плане движение многоопорной ДМ 1 (реверсивной) при поливе полосы (участка орошения 3÷12) прямоугольной конфигурации, половина которой отведена под «черный пар» или выведена из севооборота (участки орошения 8÷12) до наступления агрономических сроков. Движение ДМ 1 из исходной позиции (межа между орошаемыми участками 12 и 3 квадратной конфигурации) выполняется поворотом по часовой стрелке при поливе полосы орошения от 15 до 19 гидрантов и против часовой стрелки водопроводящего трубопровода ДМ 1 вокруг вертикальных осей симметрии гидрантов от 19 к 15 по орошаемым ранее участкам 3÷7.
Участки 8-12 в данном массиве не орошаются и находятся в режиме «черного пара». При достижении оптимальных температурных режимов почвы и воздуха на участках 8-12 могут быть высажены сельскохозяйственные культуры.
Проход дождевальной машины 1 (реверсивной) от гидрантов 15, 16, 17, 18 и 19 в одном направлении, а потом в обратном обеспечивает равномерные распределения искусственного дождя по всей поверхности орошаемого массива прямоугольной конфигурации.
На фиг.4 (вариант 3) изображено движение (нереверсивной) многоопорной дождевальной машины 1 (например, с гидроприводом колес опорных тележек водопроводящего трубопровода) с проходом по орошаемым участкам 3÷5. Движение осуществляется от исходной позиции (между орошаемыми участками 2 и 3) по кругу вокруг вертикальной оси симметрии первого гидранта 15 водоподводящей сети 14, установленного в ряду гидрантов 15÷18, и смещенных друг относительно друга с удалением, равным длине водопроводящего трубопровода ДМ 1. При достижении удаленным от оси вращения концом 21 водопроводящего трубопровода ДМ 1 гидранта 16, сохраняют направление поворотов вокруг вертикальных осей симметрии последующих (17, 18) гидрантов. Возврат нереверсивной многоопорной ДМ 1 кругового действия с гидроприводом опорных тележек 22 на исходную позицию указанным приемом производят по смежной, не поливаемой ранее полосе, занятой участками 10, 11, 12.
На фиг.5 (вариант 4) представлено движение (вид в плане) многоопорной дождевальной машины 1 (реверсивной) путем поворотов водопроводящего трубопровода ДМ 1 вокруг гидрантов, часть которых размещена на отводах от оросительной сети 14 до вершин квадратов орошаемых участков. Движение по кругу от исходной позиции осуществляется поворотом дождевальной машины вокруг вертикальных осей симметрии гидрантов 16 и установленных во втором параллельном первому ряду гидрантов 27 и 28, размещенных напротив (17, 18) с удалением друг от друга на расстоянии, равном постоянной ширине полосы орошения многоопорной ДМ 1. Поворот водопроводящего трубопровода ДМ 1 от гидранта 16 до гидранта 17 происходит по часовой стрелке, а затем, после подключения ДМ 1 к гидранту 17, перемещается в этом же направлении до гидранта 27 и после подключения к последнему начинает движение против часовой стрелки к 28 гидранту с подключением к нему ДМ 1 и перемещением ее к гидранту 18. Далее перемещения ДМ 1 повторяются в общем направлении движения вдоль полосы орошения. На фиг.5 жирными линиями со стрелками указаны траектории движения концов 20 и 21 водопроводящего трубопровода ДМ 1 для последовательного соединения с гидрантами 16, 17, 27, 28, 18, 19.
Представленные на фиг.1÷5 варианты способов движения многоопорных дождевальных машин кругового действия обеспечивают полив полей прямоугольной и квадратной конфигураций, не возращаясь по проторенной колее, что уменьшает глубину колеи под колесами опорных тележек и повышает равномерность распределения искусственного дождя, исключает холостые переезды.
| название | год | авторы | номер документа |
|---|---|---|---|
| Модульно-комбинированная оросительная система | 2022 |
|
RU2796493C1 |
| Блочно-составная оросительная система для равнинно-склонной зоны | 2023 |
|
RU2801004C1 |
| СПОСОБ РАЗМЕЩЕНИЯ КОНТРОЛЬНЫХ ДЕЛЯНОК НА УЧЕТНОЙ ПЛОЩАДИ ПРИ ОПРЕДЕЛЕНИИ УРОЖАЙНОСТИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР НА ПОЛЯХ КРУГЛОЙ ФОРМЫ, ОРОШАЕМЫХ ДОЖДЕВАЛЬНЫМИ МАШИНАМИ КРУГОВОГО ДЕЙСТВИЯ | 2006 |
|
RU2305389C1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2351119C1 |
| ДОЖДЕВАЛЬНАЯ МАШИНА ДЛЯ ГОРНЫХ И ПРЕДГОРНЫХ УЧАСТКОВ МЕСТНОСТИ | 2017 |
|
RU2638312C1 |
| Многоопорная дождевальная машина | 1990 |
|
SU1808267A1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА | 2001 |
|
RU2206979C2 |
| "Многоопорная машина приповерхностного дождевания "Россия" | 1991 |
|
SU1780651A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ПАРАМЕТРОВ КОНТРОЛЬНЫХ ДЕЛЯНОК ПРИ УСТАНОВЛЕНИИ УРОЖАЙНОСТИ СЕЛЬСКОХОЗЯЙСТВЕННЫХ КУЛЬТУР НА ОРОШАЕМОМ ПОЛЕ КРУГЛОЙ ФОРМЫ | 2006 |
|
RU2305391C1 |
| МНОГООПОРНАЯ ДОЖДЕВАЛЬНАЯ МАШИНА КРУГОВОГО ДЕЙСТВИЯ | 2015 |
|
RU2596130C1 |


Способ включает перемещение многоопорной дождевальной машины с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидрантов, расположенных друг от друга на расстоянии, равном длине машины, при движении от исходной позиции сохраняется направление поворотов вокруг вертикальных осей симметрии гидрантов, а возврат дождевальной машины на исходную позицию производят по смежной, не поливаемой ранее полосе. Согласно другому варианту поворот дождевальной машины производится вокруг вертикальных осей симметрии гидрантов по часовой стрелке, затем повторяют движение машины против часовой стрелки вокруг вертикальных осей симметрии гидрантов дополнительного ряда, которые располагают на концах отводов от водопроводящей сети напротив основных гидрантов на расстоянии, равном длине дождевальной машины, при этом сохраняется общее направление движения вдоль полосы орошения. Техническим результатом группы изобретений является повышение качества полива. 2 н.п. ф-лы, 5 ил.
1. Способ движения многоопорной дождевальной машины кругового действия при поливе полей квадратной или прямоугольной конфигурации, включающий перемещение многоопорной дождевальной машины с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидрантов, расположенных друг от друга на расстоянии, равном длине машины, отличающийся тем, что при движении от исходной позиции сохраняется направление поворотов вокруг вертикальных осей симметрии гидрантов, а возврат многоопорной дождевальной машины кругового действия на исходную позицию производят по смежной, не поливаемой ранее полосе.
2. Способ движения многоопорной дождевальной машины кругового действия при поливе полей квадратной или прямоугольной конфигурации, включающий перемещение многоопорной дождевальной машины с постоянной шириной полосы орошения по кругу вокруг вертикальной оси симметрии гидрантов, расположенных друг от друга на расстоянии, равном длине машины, отличающийся тем, что поворот дождевальной машины производится вокруг вертикальных осей симметрии гидрантов по часовой стрелке, а затем повторяют движение машины против часовой стрелки вокруг вертикальных осей симметрии гидрантов дополнительного ряда, которые располагают на концах отводов от водопроводящей сети напротив основных гидрантов на расстоянии, равном длине дождевальной машины, при этом сохраняется общее направление движения вдоль полосы орошения.
| Дождевальная машина кругового действия | 1977 |
|
SU679187A1 |
| Металлическая камера для колесных шин | 1925 |
|
SU7829A1 |
| ПОДВИЖНОЕ ИРРИГАЦИОННОЕ УСТРОЙСТВО | 2007 |
|
RU2351119C1 |
| Дождевальная машина | 1980 |
|
SU858675A1 |
| Дождевальная машина | 1986 |
|
SU1375196A1 |
| Многоопорная дождевальная машина | 1990 |
|
SU1808267A1 |
| Дождевальная установка | 1984 |
|
SU1186162A1 |
| US 8302882 B2, 06.11.2012 | |||

