Настоящее изобретение касается магнитного радиального подшипника, включающего в себя статор, который имеет первую катушку, вторую катушку, третью катушку и четвертую катушку, из которых первая катушка и третья катушка находятся на первой оси, а также вторая и четвертая катушки - на второй оси напротив друг друга. Кроме того, настоящее изобретение касается способа управления такого рода магнитным радиальным подшипником.
Магнитные радиальные подшипники создают во вращающихся валах вихревые токи. Эти токи приводят к нежелательному нагреву вала. Связанная с этим мощность потерь уменьшает коэффициент полезного действия машины. Шихтованное обратное магнитное замыкание на вал, которое снизило бы вихревые токи, уменьшает жесткость вала.
Поэтому до сих пор искали компромисс из наименьших возможных вихревых токов потерь и наибольшей возможной жесткости. За вихревые токи потерь, по существу, ответственны числа полюсов магнитных полей, частота вращения вала и вид шихтовки. Для достижения низких частот перемагничивания стремятся к малому числу полюсов. Но при этом магнитное поле проникает глубоко в ротор и требует, таким образом, шихтовки с высоким ярмом ротора, что приводит тогда к тонкому валу. Когда превышается критическая склонность к самовозбуждению, число полюсов должно увеличиваться, что снова приводит к более высоким частотам и потерям.
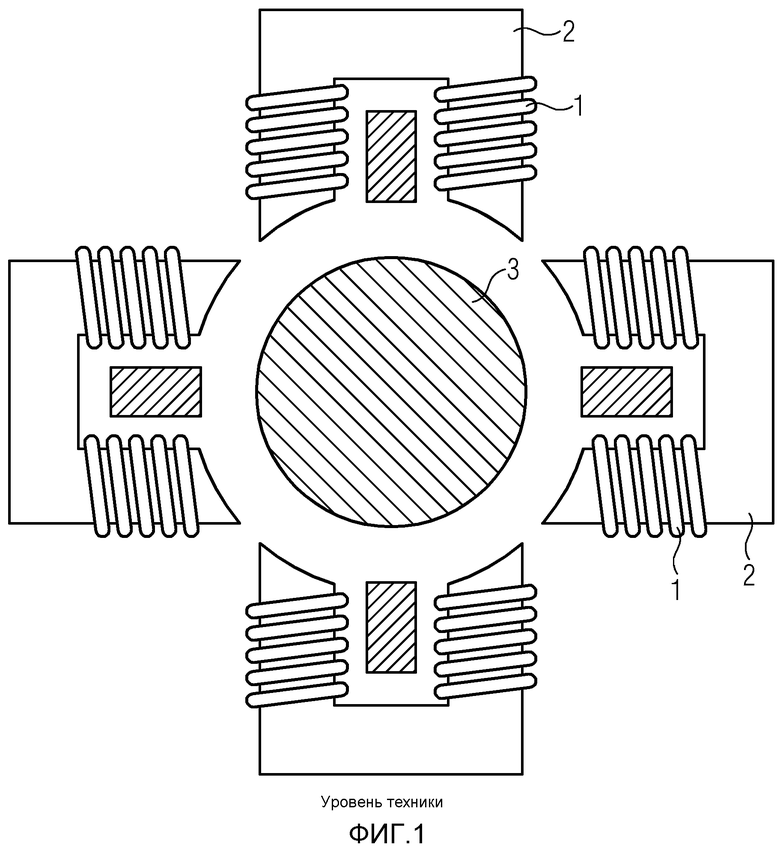
На фиг. 1 изображено поперечное сечение традиционного радиального магнитного подшипника. Статор имеет здесь восемь катушек, вставленных в осевые пазы, причем на фиг. 1 схематично обозначены только катушки 1 и сердечники 2 катушек. Внутри статора магнитным полем удерживается ротор 3. Ротор 3 представляет собой вал, который должен устанавливаться на подшипники. Оси катушек 1 проходят здесь по существу радиально относительно оси вращения ротора 3.
Из книги «Magnetic Bearings» Герхарда Швайцера и Эрика Х.Маслена, издательство Шпрингер, Берлин, 2009, XV, страницы 82-84 и 96, известны радиальные магнитные подшипники с осевыми катушками. Это значит, что оси катушек распространяются параллельно оси подшипника. Соответственно этому направление потока как в катушках, так и в роторе проходит по существу в осевом направлении.
Задача настоящего изобретения заключается в том, чтобы предоставить просто и надежно управляемый или, соответственно, регулируемый радиальный магнитный подшипник. Кроме того, должен также предоставляться надлежащий способ управления магнитным радиальным подшипником.
В соответствии с изобретением эта задача решается с помощью магнитного радиального подшипника, включающего в себя:
- статор, который имеет первую катушку, вторую катушку, третью катушку и четвертую катушку, из которых первая катушка и третья катушка находятся на первой оси, а также вторая и четвертая катушки - на второй оси напротив друг друга, и включающего в себя:
- устройство управления для управления катушками статора с 3-фазным током, который имеет фазы U, V и W, при этом
- для управления первой осью
- первый разъем второй катушки и первый разъем четвертой катушки соединены с фазой U,
- второй разъем второй катушки - с фазой W,
а
- второй разъем четвертой катушки - с фазой V,
- для управления второй осью
- первый разъем первой катушки и первый разъем третьей катушки соединены с фазой U,
- второй разъем первой катушки - с фазой W,
а
- второй разъем третьей катушки - с фазой V,
- амплитуды токов фаз U, V и W оценены каждая смещенной по фазе на 120 градусов относительно друг друга синусоидальной функцией, и
- управление с помощью устройства управления для каждой из осей осуществляется всегда в варьируемой рабочей точке, которая для отдельных фаз соответственно каждой синусоидальной функции задает значение для оценки амплитуд.
Кроме того, в соответствии с изобретением предоставляется способ управления магнитным радиальным подшипником, включающим в себя статор, который имеет первую катушку, вторую катушку, третью катушку и четвертую катушку, из которых первая катушка и третья катушка находятся на первой оси, а также вторая и четвертая катушки - на второй оси напротив друг друга, посредством
- управления катушками статора с 3-фазным током, который имеет фазы U, V и W, при этом
- для управления первой осью
- первый разъем второй катушки и первый разъем четвертой катушки соединены с фазой U,
- второй разъем второй катушки - с фазой W,
а
- второй разъем четвертой катушки с фазой V,
- для управления второй осью
- первый разъем первой катушки и первый разъем третьей катушки соединены с фазой U,
- второй разъем первой катушки - с фазой W,
а
- второй разъем третьей катушки - с фазой V,
- амплитуды токов фаз U, V и W оцениваются каждая смещенной по фазе на 120 градусов относительно друг друга синусоидальной функцией, и
- управление для каждой из осей осуществляется в варьируемой рабочей точке, которая для отдельных фаз соответственно каждой синусоидальной функции задает значение для оценки амплитуд.
Предпочтительным образом возможно трехфазное управление катушками радиального подшипника, и может достигаться очень низкое число полюсов, а именно число пар полюсов p=0 для основного возбуждения или, соответственно, предварительного намагничивания. Дополнительное поле может создаваться одной парой полюсов p=1. В целом так могут достигаться очень низкие частоты перемагничивания, так что потери от вихревых токов соответственно малы.
Предпочтительно первая ось располагается перпендикулярно второй оси. При этом могут создаваться ортогональные силы, с помощью которых ротор может удерживаться точно в середине статора.
В одном из предпочтительных вариантов осуществления для варьируемой рабочей точки задана рабочая область, которая лежит между двумя предельными значениями, находящимися на заданном расстоянии от некоторого углового значения, причем это угловое значение предусмотрено для точки пересечения двух из синусоидальных функций. Ограничение рабочей точки рабочей областью обеспечивает, что отдельными катушками всегда создаются желаемые силы.
В частности, эта рабочая область может иметь протяженность, равную π/3. При этой протяженности всегда имеются однозначные условия сил катушек.
Кроме того, предпочтительно, когда катушки статора являются каждая осевыми катушками относительно оси вращения радиального подшипника. Это имеет то преимущество, что радиальный подшипник всегда может строиться очень компактно.
Кроме того, катушки статора должны иметь одинаковое направление намотки обмотки. Благодаря этому управление может выполняться проще.
Как уже было указано выше, в одном из предпочтительных вариантов осуществления основное возбуждение катушек может устанавливаться с помощью устройства управления с числом пар полюсов p=0. Это имеет вышеназванное преимущество низких потерь от вихревых токов.
Кроме того, с помощью устройства управления может устанавливаться дополнительное возбуждение катушек с числом пар полюсов p=1. При этом при очень малом числе пар полюсов может достигаться сила в направлении одной из осей перпендикулярно к оси вращения ротора. Так как число пар полюсов, в свою очередь, очень мало, можно рассчитывать на соответственно низкие потери от вихревых токов.
Настоящее изобретение поясняется подробнее с помощью прилагаемых чертежей, на которых показано:
фиг. 1: поперечное сечение традиционного магнитного радиального подшипника;
фиг. 2: поперечное сечение предлагаемого изобретением магнитного радиального подшипника;
фиг. 3: сечение по одной из осей X, Y магнитного радиального подшипника с фиг. 2;
фиг. 4: схема катушек магнитного радиального подшипника с трехфазным управлением и
фиг. 5: оценка управляющих токов трех фаз.
Изложенные ниже более подробно примеры осуществления представляют собой предпочтительные варианты осуществления настоящего изобретения.
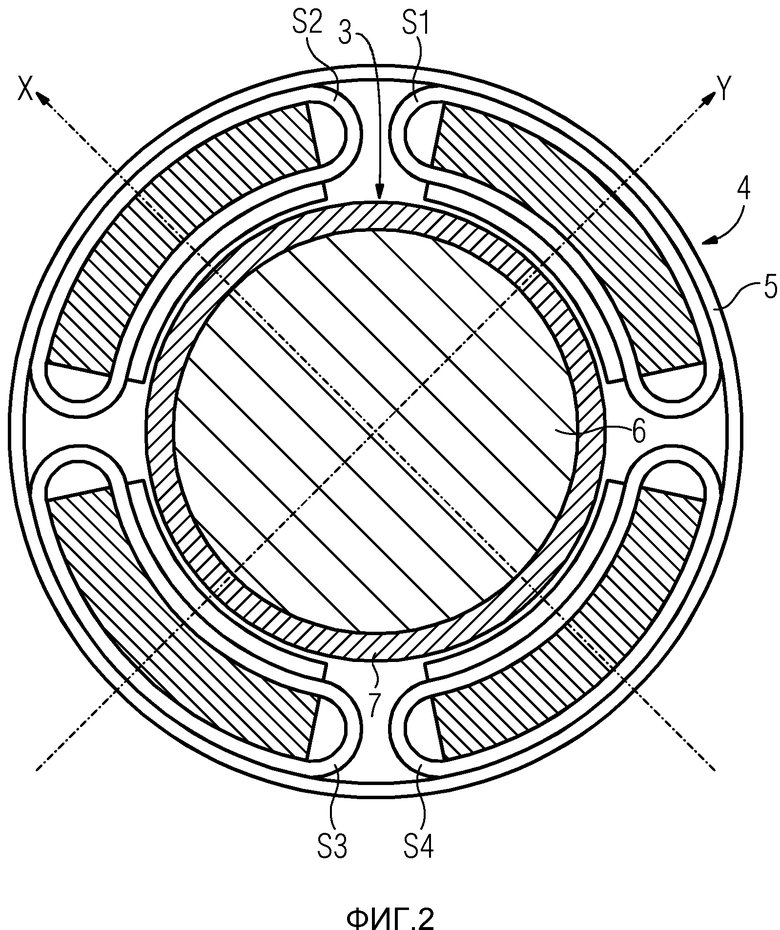
В примере осуществления фиг. 2 изображен магнитный радиальный подшипник, включающий в себя статор 4 и ротор 3. Статор 4 имеет корпус 5, который выполнен в виде полого цилиндра. Внутри корпуса 5 находятся, прилегая к стенке корпуса или по меньшей мере копируя стенку корпуса, четыре катушки S1, S2, S3 и S4. Эти катушки S1-S4 являются аксиальными катушками или, соответственно, осевыми катушками. Это значит, что ось катушки проходит параллельно оси подшипника (перпендикулярно к плоскости чертежа фиг. 2). На изображении сечения фиг. 2 каждая катушка S1-S4 распространяется в одном квадранте внутри корпуса 5. Каждая катушка распространяется почти по всем 90° соответствующего квадранта. При этом наружный участок и внутренний участок всегда проходят концентрически корпусу 5. Внутри подшипника благодаря этому получается свободное пространство, в котором может свободно двигаться ротор 3. Ротор 3 имеет здесь вал 6, который окружен листовой сталью 7 в виде боковой поверхности. Между ротором 3 и статором 4 находится зазор подшипника, который обычно составляет от 2/10 до 3/10 мм.
Катушки S2 и S4 находятся напротив друг друга на одной первой оси X, которая образует биссектрису второго квадранта и четвертого квадранта и проходит через ось подшипника. Кроме того, катушки S1 и S3 находятся напротив друг друга на одной второй оси Y, которая образует биссектрису первого квадранта и третьего квадранта и проходит через ось подшипника. Соответственно этому катушки S2 и S4 создают в первую очередь силы по оси X, а катушки S1 и S3 в первую очередь силы по оси Y.
На фиг. 3 магнитный радиальный подшипник с фиг.2 изображен в осевом сечении по оси X или Y. На этом изображении хорошо различим ротор с валом 6 и листовой сталью 7. Здесь можно различить, что он окружен катушками S2 и S4. Символично на фиг. 3 изображено также направление 8 магнитного потока. Соответственно этому магнитный поток в осевом направлении направляется через катушку, а вне катушки в противоположном направлении направляется обратно через листовую сталь 7. Благодаря четырем осевым катушкам магнитный радиальный подшипник может реализовываться с толстым валом 6 и малой глубиной листовой стали ротора, а также короткой конструкцией.
В частности, при этой конструкции возможно осевое направление потока с наименьшим числом полюсов. Предварительное намагничивание может создаваться полем с числом пар полюсов p=0. При этом по периметру распределены одни только северные полюса N или одни только южные полюса S. Это обозначено на фиг. 3 символами N и S.
Если полюса по периметру выполнены с одинаковой силой, это соответствует основному возбуждению без дополнительной силы. Если, напротив, требуется дополнительная сила (необходимо тянуть вверх вал 6 против силы веса), то полюса в катушках S1 и S2 должны быть выполнены сильнее, чем полюса в катушках S3 и S4. Благодаря этому неодинаковому исполнению полюсов получается в минимальном случае число пар полюсов p=1. С помощью одних и тех же катушек может создаваться как основное возбуждение, так и дополнительное возбуждение.
Вследствие малого числа пар полюсов создается очень низкая частота перемагничивания, так что потери от вихревых токов соответственно низки. Кроме того, благодаря осевому направлению потока достигается малая глубина проникновения.
С помощью фиг. 4 и фиг. 5 теперь поясняется, как может осуществляться управление магнитным радиальным подшипником, чтобы стабильно удерживать ротор в статоре. На фиг. 4 для этого показана схема катушек S1-S4. Каждая из катушек имеет первый разъем и второй разъем. Соответственно этому первая катушка S1 имеет первый разъем S1A и второй разъем S1B. Вторая катушка S2 имеет первый разъем S2A и второй разъем S2B. Третья катушка имеет первый разъем S3A и второй разъем S3B. Наконец, четвертая катушка S4 имеет первый разъем S4A и второй разъем S4B. Катушки S1 и S3 находятся на второй оси Y, а катушки S2 и S4 - на первой оси X напротив друг друга.
В соответствии с настоящим изобретением управление катушками S1-S4 осуществляется с помощью трехфазного тока. Этот ток имеет фазы U, V и W. Для управления или, соответственно, регулирования сил по оси Y (вторая ось) первые разъемы S1A и S3A первой катушки S1 и третьей катушки S3 соединены с фазой U. Второй разъем S1B первой катушки S1 соединен с фазой W, а второй разъем S3B третьей катушки S3 - с фазой V. Аналогично для управления или, соответственно, регулирования сил по оси X (первая ось) первые разъемы S2A и S4A второй катушки S2 и четвертой катушки S4 соединены с фазой U, второй разъем S2B второй катушки S2 - с фазой W, а второй разъем S4B четвертой катушки S4 - с фазой V. Соответственно этому, например, в катушку S1 течет ток IW, а из нее ток IU1, при этом IW=IU1. В катушку S3 течет ток IV, а из нее ток IU2, при этом IV=IU2. Из катушек S1 и S3 течет при этом ток IU=IU1+IU2. Если токи IV и IW фаз V и W одинаковы, то через все катушки течет одинаковый ток. Ротор 3 тогда притягивается всеми четырьмя катушками с одинаковой силой. Это соответствует основному возбуждению.
На фиг. 5 воспроизведена фазовая диаграмма токов фаз U, V и W. В соответствии с изобретением каждая фаза оценивается соответственно изображенным там синусоидальным функциям fu, fv, fw.
Эту оценку и соответствующее управление производит устройство управления, которое подключено к катушкам S1-S4.
Чтобы можно было распознать синусоидальное изменение этих функций fu, fv и fw, в каждом случае изображен целый период (2π) каждой функции. Соответственно этому для одной определенной рабочей точки, которая соответствует углу φ, всегда получается относительное значение тока I/I0. Синусоидальные функции fu, fv и fw смещены каждая по фазе на 120° (2π/3) относительно друг друга.
Как было упомянуто выше, при основном возбуждении через все катушки течет одинаковый ток. В частности, соответственно этому на разъемах S1B и S3B фаз W и V течет одинаковый ток. Но это означает, что синусоидальные функции fv и fw должны пересекаться в рабочей точке основного возбуждения. Точке пересечения на фиг. 5 соответствует рабочая точка ag основного возбуждения. В этой рабочей точке ag получается по величине максимум оценочной или, соответственно, синусоидальной функции fu фазы U. Величина функции fu в этом месте вдвое выше, чем величина функций fv и fw. Соответственно этому ток фазы U вдвое больше, чем токи фазы V или W. В принципе, ток фазы U всегда соответствует сумме токов фаз V или W, что непосредственно вытекает из фиг. 4.
Вокруг рабочей точки ag основного возбуждения может задаваться рабочая область ab. Например, протяженность рабочей области ab составляет π/3. Предельные значения или, соответственно, пределы рабочей области ab составляют соответственно этому +/- π/6. У этих пределов относительно оси X или оси Y создается максимальная сила в одном направлении или в противоположном направлении. Для устройства управления достаточно, таким образом, выбрать рабочую точку (угол φ управления) в рабочей области ab, чтобы создавать необходимые силы или, соответственно, противодействующие силы. Это относится к силам как по оси X, так и по оси Y.
Это можно еще раз пояснить на примере. Если в фазе W не течет ток (левый предел рабочей области ab, то через катушку S1 не течет ток. Тогда ток в фазах U и V одинаков, но имеет противоположное направление. Катушка S1 при этом не создает поля, в то время как катушка S3 производит максимальное поле. Соответственно этому магнитный радиальный подшипник тянет ротор 3 в соответствии с фиг. 2 по оси Y влево вниз. Соответствующее относится ко всем другим рабочим точкам.
Предлагаемая изобретением комбинация осевого поля с трехфазным питанием у магнитного радиального подшипника решает существенные проблемы подшипников такого рода, в частности проблемы потерь от вихревых токов. В целом реализованный таким образом магнитный радиальный подшипник может строиться очень компактно. При этом уменьшается зазор подшипника и повышается частота колебаний изгиба вала. Кроме того, затраты на изготовление могут быть очень низкими.
| название | год | авторы | номер документа |
|---|---|---|---|
| КОНТРОЛЛЕР ДЛЯ ПЕРЕКЛЮЧАЕМОГО РЕАКТИВНОГО ЭЛЕКТРОМОТОРА | 2018 |
|
RU2694067C1 |
| ПРИВОДНОЙ ИНСТРУМЕНТ | 2010 |
|
RU2545171C2 |
| Трехфазная однослойная обмотка | 1990 |
|
SU1758782A1 |
| УНИПОЛЯРНЫЙ МОТОР-ГЕНЕРАТОР | 2012 |
|
RU2586111C2 |
| СПОСОБ ИЗГОТОВЛЕНИЯ ОБМОТКИ РОТОРА ЭЛЕКТРИЧЕСКОЙ МАШИНЫ, А ТАКЖЕ ЭЛЕКТРИЧЕСКАЯ МАШИНА С ИЗГОТОВЛЕННОЙ ЭТИМ СПОСОБОМ ОБМОТКОЙ РОТОРА | 2008 |
|
RU2488935C2 |
| СПОСОБ ДЛЯ КОНТРОЛЯ УСТРОЙСТВА МАГНИТНОГО ПОДШИПНИКА | 2019 |
|
RU2714354C1 |
| СПОСОБ КОНТРОЛИРОВАНИЯ УСТРОЙСТВА МАГНИТНОГО ПОДШИПНИКА | 2018 |
|
RU2710000C1 |
| УСТРОЙСТВО ПРЕОБРАЗОВАНИЯ МОЩНОСТИ | 2011 |
|
RU2516872C1 |
| СТИРАЛЬНАЯ МАШИНА | 2005 |
|
RU2303668C2 |
| СИСТЕМА КОНТРОЛЯ РАБОТЫ БЕСЩЕТОЧНЫХ ДВИГАТЕЛЕЙ | 2002 |
|
RU2273944C2 |


Изобретение касается магнитного радиального подшипника и способа управления такого рода магнитным радиальным подшипником. Подшипник включает в себя статор (4), который имеет первую катушку (S1), вторую катушку (S2), третью катушку (S3) и четвертую катушку (S4), из которых первая катушка (S1) и третья катушка (S3) находятся на первой оси (Y), а также вторая (S2) и четвертая (S4) катушки - на второй оси (X) напротив друг друга. Управление катушками (S1, S2, S3, S4) осуществляется с трехфазным током (U, V и W). Амплитуды токов фаз (U, V и W) оцениваются каждая смещенной относительно друг друга на 120° синусоидальной функцией. Управление осуществляется с помощью устройства управления в варьируемой рабочей точке, которая задает для отдельных фаз значение оценки амплитуд каждой синусоидальной функции. Технический результат: создание компактного и надежно управляемого или, соответственно, регулируемого радиального магнитного подшипника с низкими потерями от вихревых токов. 2 н. и 28 з.п. ф-лы, 5 ил.
1. Магнитный радиальный подшипник, включающий в себя:
статор (4), который имеет первую катушку (S1), вторую катушку (S2), третью катушку (S3) и четвертую катушку (S4), из которых первая катушка (S1) и третья катушка (S3) находятся на первой оси (Y), а также вторая и четвертая катушки - на второй оси (X) напротив друг друга,
отличающийся
- устройством управления для управления катушками статора с 3-фазным током, который имеет фазы U, V и W, при этом
- для управления первой осью (Y)
- первый разъем (S2A) второй катушки (S2) и первый разъем (S4A) четвертой катушки (S4) соединены с фазой U,
- второй разъем (S2B) второй катушки (S2) - с фазой W, а
- второй разъем (S4B) четвертой катушки (S4) - с фазой V,
- для управления второй осью (X)
- первый разъем (S1A) первой катушки (S1) и первый разъем (S3A) третьей катушки (S3) соединен с фазой U,
- второй разъем (S1B) первой катушки (S1) - с фазой W, и
- второй разъем (S3B) третьей катушки (S3) - с фазой V,
- амплитуды токов фаз U, V и W оценены каждая смещенной по фазе на 120 градусов относительно друг друга синусоидальной функцией (fu, fv, fw),
- управление с помощью устройства управления для каждой из осей (X, Y) осуществляется всегда в варьируемой рабочей точке, которая для отдельных фаз соответственно каждой синусоидальной функции задает значение для оценки амплитуд.
2. Магнитный радиальный подшипник по п. 1, причем первая ось (Y) располагается перпендикулярно второй оси (X).
3. Магнитный радиальный подшипник по п. 1 или 2, причем для варьируемой рабочей точки задана рабочая область (ab), которая лежит между двумя предельными значениями, находящимися на заданном расстоянии от некоторого углового значения (аg), причем угловое значение предусмотрено для точки пересечения двух из синусоидальных функций.
4. Магнитный радиальный подшипник по п. 3, причем рабочая область (ab) имеет протяженность, равную π/3.
5. Магнитный радиальный подшипник по п. 1, причем катушки (S1-S4) статора (4) являются каждая осевыми катушками относительно оси вращения радиального подшипника.
6. Магнитный радиальный подшипник по п. 2, причем катушки (S1-S4) статора (4) являются каждая осевыми катушками относительно оси вращения радиального подшипника.
7. Магнитный радиальный подшипник по п. 3, причем катушки (S1-S4) статора (4) являются каждая осевыми катушками относительно оси вращения радиального подшипника.
8. Магнитный радиальный подшипник по п. 4, причем катушки (S1-S4) статора (4) являются каждая осевыми катушками относительно оси вращения радиального подшипника.
9. Магнитный радиальный подшипник по п. 1, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
10. Магнитный радиальный подшипник по п. 2, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
11. Магнитный радиальный подшипник по п. 3, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
12. Магнитный радиальный подшипник по п. 4, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
13. Магнитный радиальный подшипник по п. 5, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
14. Магнитный радиальный подшипник по п.6, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
15. Магнитный радиальный подшипник по п. 8, причем катушки (S1-S4) статора (4) имеют одинаковое направление намотки обмотки.
16. Магнитный радиальный подшипник по п. 1, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
17. Магнитный радиальный подшипник по п. 2, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
18. Магнитный радиальный подшипник по п. 3, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
19. Магнитный радиальный подшипник по п. 4, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
20. Магнитный радиальный подшипник по п. 5, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
21. Магнитный радиальный подшипник по п. 6, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
22. Магнитный радиальный подшипник по п. 7, причем с помощью устройства управления основное возбуждение катушек может устанавливаться с числом пар полюсов, равным нулю.
23. Магнитный радиальный подшипник по п. 1, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
24. Магнитный радиальный подшипник по п. 2, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
25. Магнитный радиальный подшипник по п. 3, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
26. Магнитный радиальный подшипник по п. 4, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
27. Магнитный радиальный подшипник по п. 5, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
28. Магнитный радиальный подшипник по п. 16, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
29. Магнитный радиальный подшипник по п. 17, причем с помощью устройства управления дополнительное возбуждение катушек может устанавливаться с числом пар полюсов, равным единице.
30. Способ управления магнитным радиальным подшипником, включающим в себя статор (4), который имеет первую катушку (S1), вторую катушку (S2), третью катушку (S3) и четвертую катушку (S4), из которых первая катушка (S1) и третья катушка (S3) находятся напротив друг друга на первой оси (Y), а также вторая и четвертая катушки - на второй оси (X),
отличающийся
- управлением катушками статора с 3-фазным током, который имеет фазы U, V и W, при этом
- для управления первой осью (Y)
- первый разъем (S2A) второй катушки (S2) и первый разъем (S4A) четвертой катушки (S4) соединены с фазой U,
- второй разъем (S2B) второй катушки (S2) - с фазой W, а
- второй разъем (S4B) четвертой катушки (S4) - с фазой V,
- для управления второй осью (X)
- первый разъем (S1A) первой катушки (S1) и первый разъем (S3A) третьей катушки (S3) соединены с фазой U,
- второй разъем (S1B) первой катушки (S1) - с фазой W, а
- второй разъем (S3B) третьей катушки - с фазой V,
- амплитуды токов фаз U, V и W оцениваются каждая смещенной по фазе на 120 градусов относительно друг друга синусоидальной функцией (fu, fv, fw),
- управление для каждой из осей (X, Y) осуществляется всегда в варьируемой рабочей точке, которая для отдельных фаз соответственно каждой синусоидальной функции задает значение для оценки амплитуд.
| СПОСОБ ПРИГОТОВЛЕНИЯ ПИТАТЕЛЬНОЙ СМЕСИ ДЛЯ ВНУТРИКИШЕЧНОГО ЗОНДОВОГО ПИТАНИЯ | 2001 |
|
RU2201699C1 |
| JP 2004132513 A, 30.04.2004 | |||
| US 2004150278 A1, 05.08.2004 | |||
| ЭЛЕКТРОМАГНИТНАЯ ОПОРА | 1992 |
|
RU2037684C1 |

