Область техники
Изобретение относится к контроллеру для переключаемого реактивного электромотора, который монтируется на транспортном средстве.
Уровень техники
Известен переключаемый реактивный электромотор. Переключаемый реактивный электромотор включает в себя статор, ротор и три фазные катушки. Каждый из статора и ротора включает в себя множество явновыраженных полюсов. Явновыраженные полюса статора и явновыраженные полюса ротора обращены друг к другу. Три фазные катушки наматываются вокруг явновыраженных полюсов статора. Переключаемый реактивный электромотор инструктирует ротору вращаться посредством магнитного притяжения, сформированного между явновыраженными полюсами статора и явновыраженными полюсами ротора.
Например, публикация не прошедшей экспертизу заявки на патент Японии № 2016-134937 (JP 2016-134937 А) описывает технологию, связанную с таким переключаемым реактивным электромотором. За счет этой технологии, когда транспортное средство с переключаемым реактивным электромотором не может начинать движение, пусковые качества транспортного средства улучшаются посредством пропускания тока, большего тока регулярного управления, в три фазные катушки.
Сущность изобретения
Тем не менее, если ток, который пропускается через катушки, увеличивается, чтобы улучшать пусковые качества транспортного средства, как описано в JP 2016-134937 А, количество тепла, вырабатываемого посредством катушек, может возможно увеличиваться. Как результат, например, требуется увеличивать размер охлаждающего устройства для того, чтобы уменьшать выработку тепла.
Изобретение осуществлено с учетом вышеизложенной ситуации и предоставляет контроллер для переключаемого реактивного электромотора, который может улучшать пусковые качества транспортного средства при уменьшении выработки тепла катушек.
Аспект изобретения предоставляет контроллер для переключаемого реактивного электромотора. Переключаемый реактивный электромотор включает в себя ротор, статор и катушку, намотанную на статор. Переключаемый реактивный электромотор монтируется на транспортном средстве в качестве источника приведения в движение для приведения в движение транспортного средства. Контроллер включает в себя электронный модуль управления. Электронный модуль управления выполнен с возможностью выполнять первое управление для возбуждения катушки при первом значении тока в первом диапазоне возбуждения. Электронный модуль управления выполнен с возможностью выполнять второе управление для возбуждения катушки при втором значении тока, большем первого значения тока, во втором диапазоне возбуждения, более узком, чем первый диапазон возбуждения, когда электронный модуль управления определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет первое управление. Каждый из первого и второго диапазонов возбуждения может представлять собой диапазон угла вращения ротора от начала возбуждения катушки до прекращения возбуждения.
С помощью контроллера с такой конфигурацией, когда транспортное средство не начинает движение, даже когда электронный модуль управления выполняет первое управление, катушка возбуждается при значении тока, большем значения тока первого управления, в диапазоне возбуждения, более узком, чем диапазон возбуждения первого управления. Таким образом, по сравнению со случаем, в котором катушка возбуждается при значении тока, большем значения тока первого управления, в диапазоне возбуждения, идентичном диапазону возбуждения первого управления, можно уменьшать выработку тепла катушки. Следовательно, можно уменьшать выработку тепла катушки и также улучшать пусковые качества транспортного средства.
В контроллере, электронный модуль управления может быть выполнен с возможностью выполнять второе управление фазной катушкой, имеющей индуктивность с положительным градиентом, и выполнять первое управление фазной катушкой, имеющей индуктивность с отрицательным градиентом. В случае индуктивности с положительным градиентом, индуктивность может увеличиваться по мере того, как угол вращения ротора увеличивается. В случае индуктивности с отрицательным градиентом, индуктивность может снижаться по мере того, как угол вращения ротора увеличивается.
С помощью контроллера с такой конфигурацией, можно эффективно увеличивать крутящий момент посредством выполнения второго управления только фазной катушкой, имеющей индуктивность с положительным градиентом.
В контроллере, электронный модуль управления может быть выполнен с возможностью выполнять второе управление множеством фазных катушек, имеющих индуктивность с положительным градиентом, когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом. Электронный модуль управления может быть выполнен с возможностью выполнять первое управление фазной катушкой, имеющей индуктивность с отрицательным градиентом в катушке, когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом.
С помощью контроллера с такой конфигурацией, можно еще более надежно инструктировать транспортному средству начинать движение посредством выполнения второго управления множеством фазных катушек, имеющих индуктивность с положительным градиентом.
В контроллере, электронный модуль управления может быть выполнен с возможностью выполнять второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом и с наибольшим градиентом в катушке, когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство может начинать движение, когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом. Электронный модуль управления может быть выполнен с возможностью выполнять первое управление множеством фазных катушек в катушке, когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство может начинать движение, когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом.
С помощью контроллера с такой конфигурацией, можно еще более эффективно увеличивать крутящий момент посредством выполнения второго управления одним из множества фазной катушки, имеющей индуктивность с положительным градиентом и с наибольшим градиентом.
В контроллере, электронный модуль управления может быть выполнен с возможностью выполнять второе управление только тогда, когда температура фазной катушки или множества фазных катушек, имеющих индуктивность с положительным градиентом, ниже или равна заданному пороговому значению.
В контроллере, общая величина тока в первом диапазоне возбуждения первого управления может быть равна общей величине тока во втором диапазоне возбуждения второго управления.
С помощью контроллера с такой конфигурацией, можно увеличивать крутящий момент при поддержании количества выработки тепла катушки на уровне, идентичном уровню первого управления, даже когда второе управление выполняется вместо первого управления.
Как описано выше, с помощью контроллера согласно аспекту изобретения, когда транспортное средство не начинает движение, даже когда первое управление для возбуждения катушки при заданном значении тока в заданном диапазоне возбуждения выполняется, второе управление для возбуждения катушки при значении тока, большем значения тока первого управления, в диапазоне возбуждения, более узком, чем диапазон возбуждения первого управления, выполняется. Таким образом, можно улучшать пусковые качества транспортного средства при уменьшении выработки тепла катушки.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
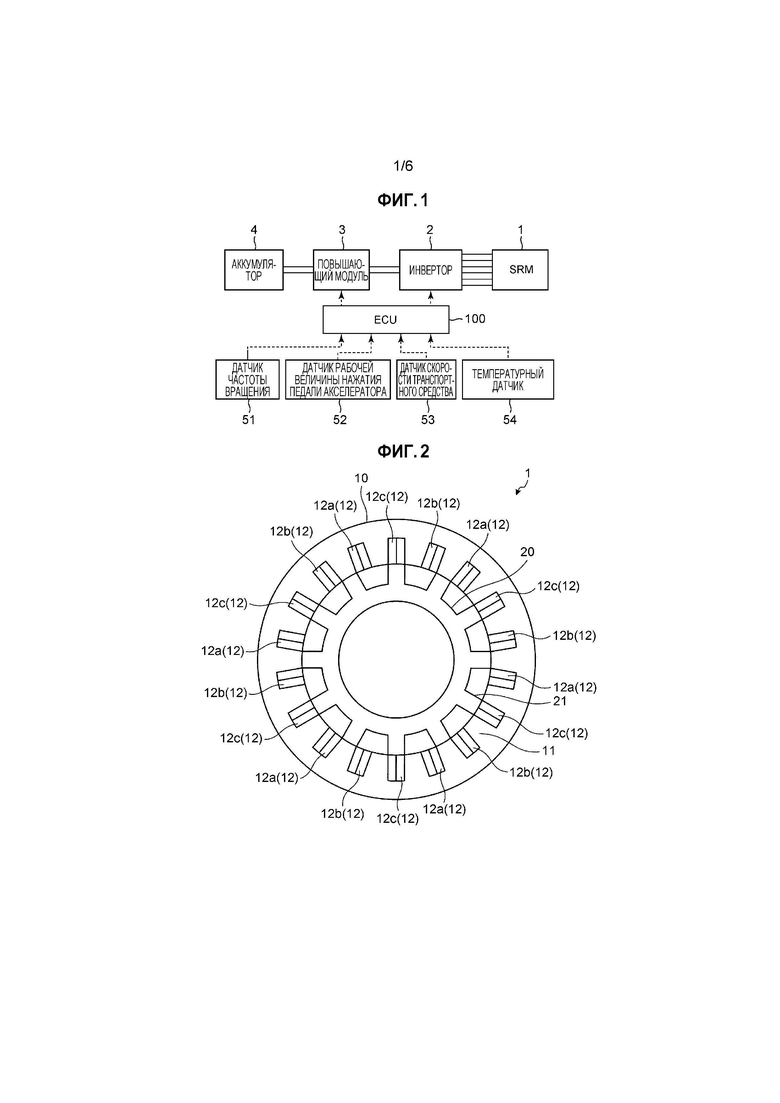
Фиг. 1 является блок-схемой, которая схематично показывает конфигурацию системы, включающей в себя контроллер для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
Фиг. 2 является схемой, которая схематично показывает конструкцию переключаемого реактивного электромотора в системе, включающей в себя контроллер для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
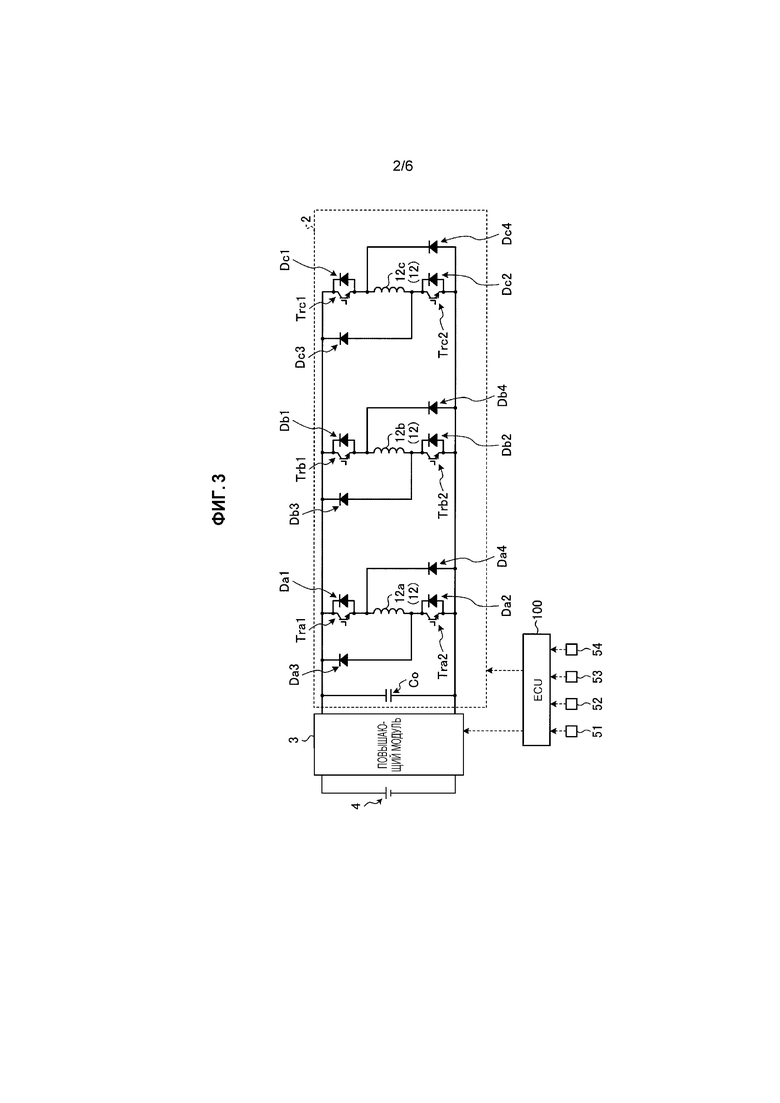
Фиг. 3 является схемой, которая схематично показывает конфигурацию инвертора в системе, включающей в себя контроллер для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
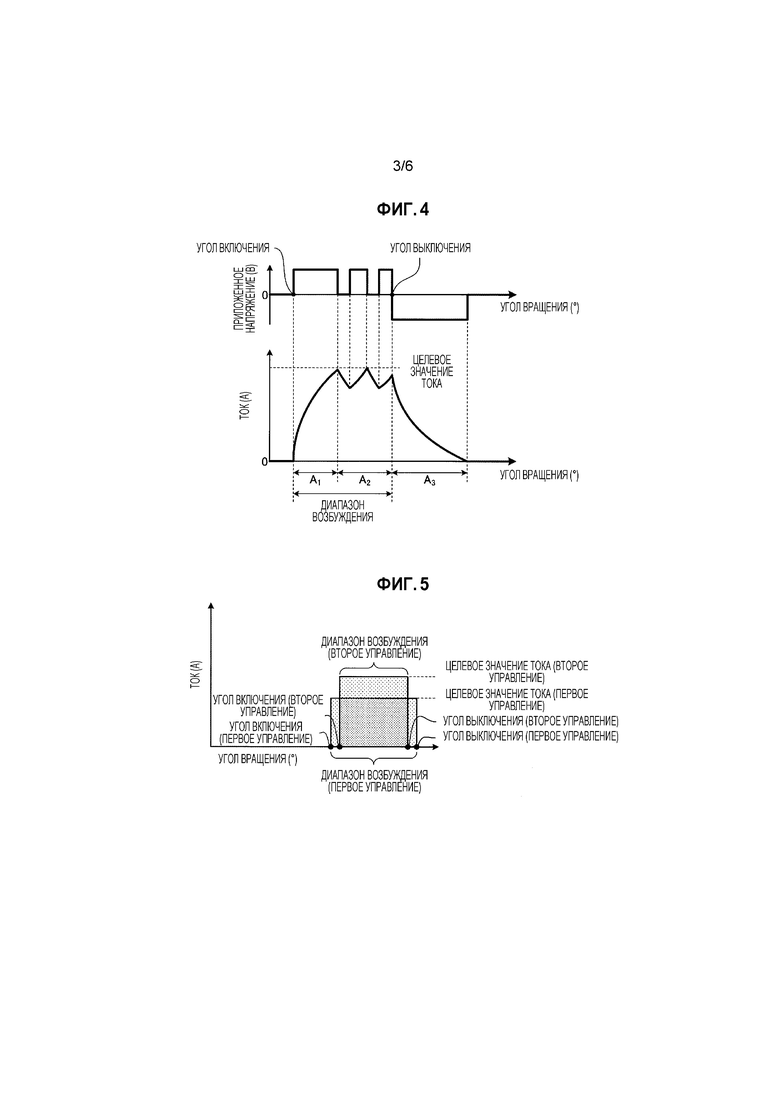
Фиг. 4 показывает графики, соответственно, показывающие форму сигнала приложенного напряжения и форму сигнала тока в контроллере для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
Фиг. 5 является графиком, который показывает взаимосвязь между диапазоном возбуждения и целевым значением тока при первом управлении и взаимосвязь между диапазоном возбуждения и целевым значением тока при втором управлении в контроллере для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
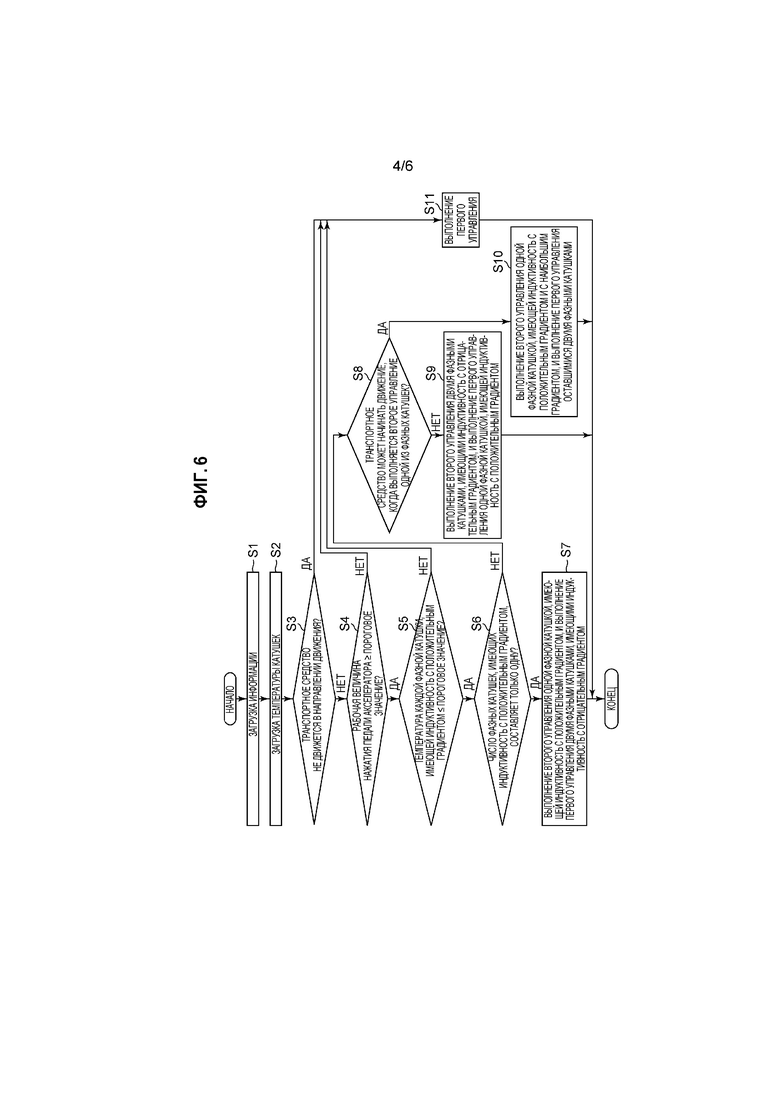
Фиг. 6 является блок-схемой последовательности операций, которая показывает способ управления приведением в действие, который осуществляется посредством контроллера для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
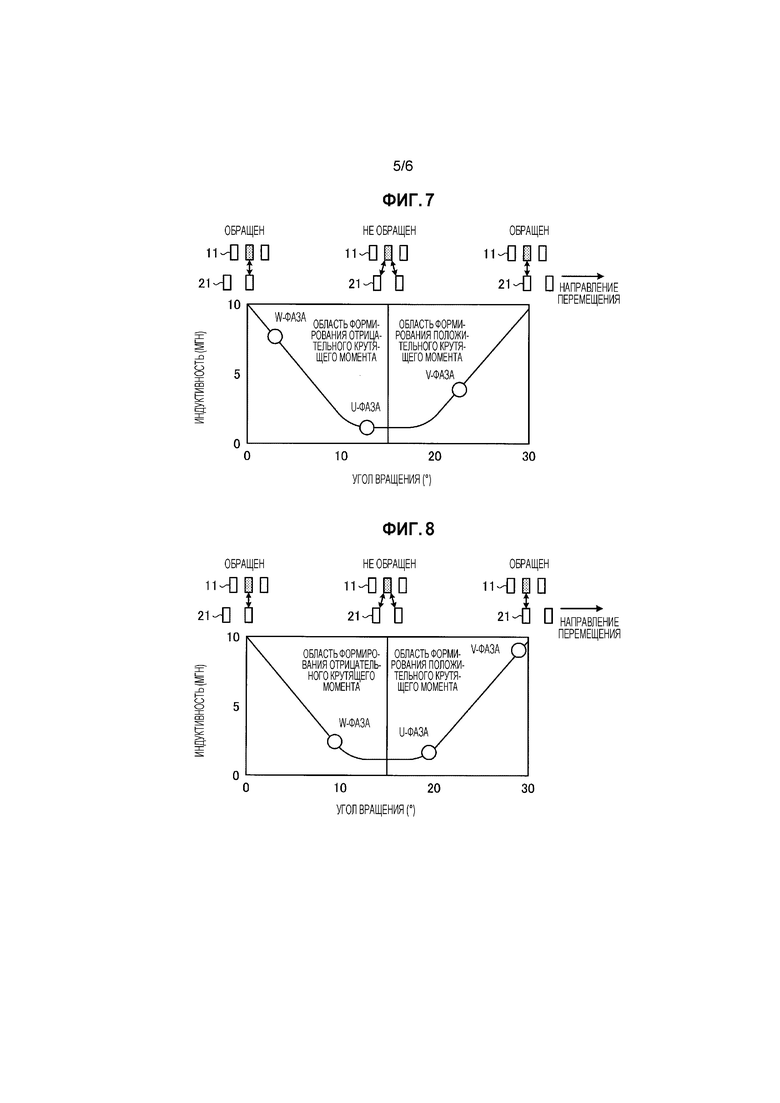
Фиг. 7 является графиком, который показывает взаимосвязь между углом вращения ротора и индуктивностью каждой катушки в контроллере для переключаемого реактивного электромотора согласно варианту осуществления изобретения;
Фиг. 8 является графиком, который показывает взаимосвязь между углом вращения ротора и индуктивностью каждой катушки в контроллере для переключаемого реактивного электромотора согласно варианту осуществления изобретения; и
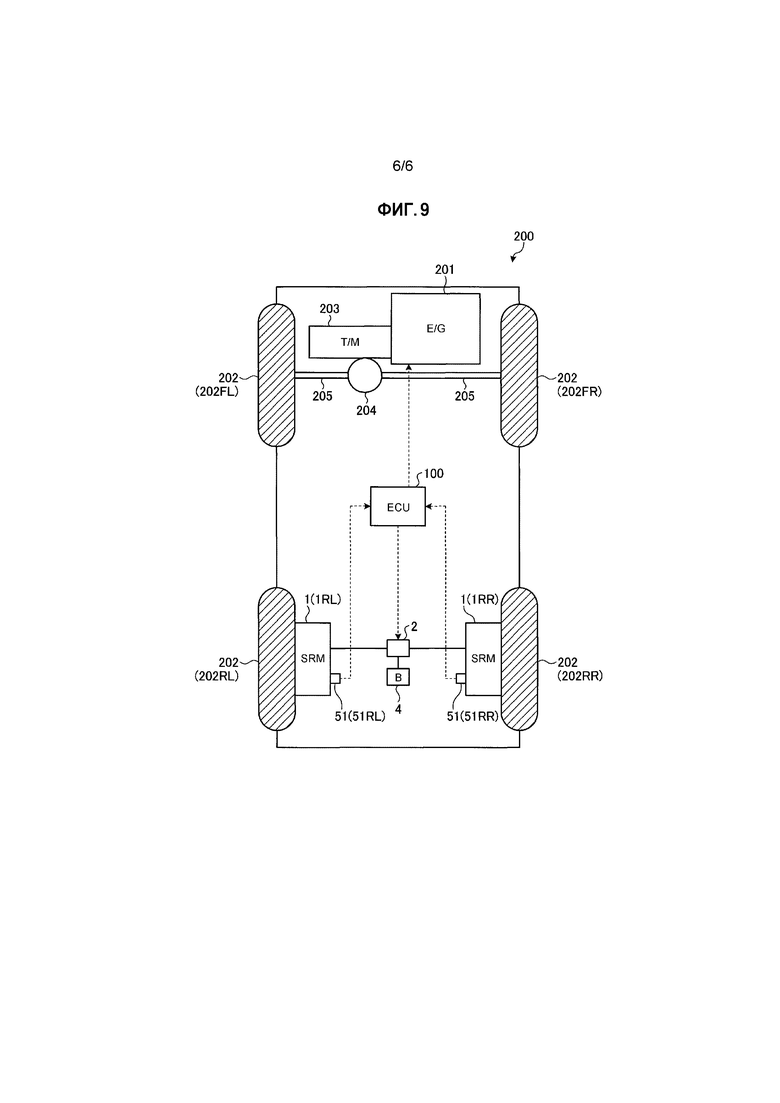
Фиг. 9 является принципиальной схемой, которая показывает транспортное средство, к которому применяется контроллер для переключаемого реактивного электромотора согласно варианту осуществления изобретения.
Подробное описание вариантов осуществления изобретения
В дальнейшем описывается вариант осуществления контроллера для переключаемого реактивного электромотора согласно изобретению со ссылкой на прилагаемые чертежи. Изобретение не ограничено нижеприведенным вариантом осуществления. Компоненты в нижеприведенном варианте осуществления также включают в себя компоненты, легко заменяемые специалистами в данной области техники, и практически идентичные компоненты.
Как показано на фиг. 1, система настоящего варианта осуществления включает в себя переключаемый реактивный электромотор 1 (в дальнейшем в этом документе называемый "SR-электромотором"), инвертор 2, повышающий модуль 3, аккумулятор 4 и электронный модуль 100 управления. Контроллер для SR-электромотора 1 согласно настоящему варианту осуществления включает в себя, по меньшей мере, инвертор 2 и электронный модуль 100 управления.
SR-электромотор 1 монтируется на транспортном средстве в качестве источника приведения в движение для приведения в движение транспортного средства. Как показано на фиг. 1, SR-электромотор 1 электрически соединяется с аккумулятором 4 через инвертор 2 и повышающий модуль 3. SR-электромотор 1 и инвертор 2 электрически соединяются друг с другом через катушки 12 (см. фиг. 2). SR-электромотор 1 функционирует в качестве не только электромотора, но также и генератора.
SR-электромотор 1 представляет собой электромотор, который не использует постоянный магнит в роторе 20. SR-электромотор 1 приводится в действие по мере того, как токи возбуждения (в дальнейшем в этом документе называемые "токами"), соответственно, пропускаются через три фазные катушки 12, намотанные на статор 10. Как показано на фиг. 2, SR-электромотор 1 включает в себя явнополюсный статор 10 и явнополюсный ротор 20. Фиг. 2 показывает конструкцию SR-электромотора 1, включающего в себя 18-полюсный статор 10 и 12-полюсный ротор 20, в качестве примера.
SR-электромотор 1 включает в себя U-фазу, V-фазу и W-фазу. U-фаза включает в себя пары из зубьев 11 статора и катушки 12a. V-фаза включает в себя пары из зубьев 11 статора и катушки 12b. W-фаза включает в себя пары из зубьев 11 статора и катушки 12c.
Как показано на фиг. 2, статор 10 включает в себя множество зубьев 11 статора на внутренней периферии своей кольцевой конструкции. Зубья 11 статора служат в качестве явновыраженных полюсов. Катушки 12, соединенные с инвертором 2, наматываются вокруг зубьев 11 статора.
Ротор 20 располагается радиально внутрь статора 10. Ротор 20 включает в себя множество зубьев 21 ротора на внешней периферии своей кольцевой конструкции. Зубья 21 ротора служат в качестве явновыраженных полюсов. Ротор 20 выполнен с возможностью вращаться как единое целое с валом ротора (не показан).
Как показано на фиг. 3, инвертор 2 формируется из электрической схемы (инверторной схемы). Инверторная схема включает в себя множество переключающих элементов таким образом, чтобы иметь возможность, соответственно, пропускать трехфазные переменные токи в катушки 12. Как показано на фиг. 3, в инверторе 2, три асимметричных полумостовых схемы соединяются параллельно друг с другом. Инвертор 2 выполнен с возможностью возбуждать каждую из трех фазных катушек 12a, 12b, 12c, соответственно, включенных в полумостовые схемы, независимо друг от друга и иметь возможность управлять каждым из токов, соответственно, пропускаемых через три фазные катушки 12a, 12b, 12c, независимо друг от друга. Таким образом, SR-электромотор 1 может приводиться в действие с помощью одной фазы и имеет такую характеристику, что SR-электромотор 1 с трудом вырабатывает тепло, например, даже когда SR-электромотор 1 продолжает вывод высокого крутящего момента.
Помимо SR-электромотора 1, синхронный электромотор с постоянными магнитами (в дальнейшем в этом документе называемый "PM-электромотором") известен в качестве электромотора, который монтируется на транспортном средстве. Инвертор PM-электромотора формируется из полномостовых схем. Инвертор PM-электромотора не может независимо возбуждать каждую из трех фазных катушек и не может независимо управлять каждым из токов, соответственно, пропускаемых через три фазные катушки. Таким образом, PM-электромотор не может приводиться в действие с помощью одной фазы и легко вырабатывает тепло, например, когда PM-электромотор продолжает вывод высокого крутящего момента.
Инверторная схема, которая составляет инвертор 2, включает в себя множество транзисторов, множество диодов и один конденсатор Co. Пара транзисторов и множество диодов предоставляются пофазно. Инвертор 2 изменяет значение тока, пропускаемого через катушку 12, посредством одновременного включения или выключения пары транзисторов в каждой фазе.
Инвертор 2 включает в себя транзисторы Tra1, Tra2 и диоды Da1, Da2, Da3, Da4 вокруг катушки 12a U-фазы. Инвертор 2 включает в себя транзисторы Trb1, Trb2 и диоды Db1, Db2, Db3, Db4 вокруг катушки 12b V-фазы. Инвертор 2 включает в себя транзисторы Trc1, Trc2 и диоды Dc1, Dc2, Dc3, Dc4 вокруг катушки 12c W-фазы.
Поскольку инвертор 2, в отличие от инвертора общего PM-электромотора, дополнительно включает в себя два добавленных диода в каждой фазе (диоды Da3, Da4, Db3, Db4, Dc3, Dc4), инвертор 2 может пропускать постоянный ток. Кроме того, поскольку инвертор 2 не имеет нейтральной точки, в отличие от инвертора общего PM-электромотора, инвертор 2 может управлять каждой фазой при независимом условии возбуждения.
Повышающий модуль 3 предоставляется между инвертором 2 и аккумулятором 4. Повышающий модуль 3 повышает напряжение, которое прикладывается к SR-электромотору 1. Повышающий модуль 3, например, представляет собой повышающий преобразователь. Повышающий модуль 3 управляется посредством электронного модуля 100 управления.
Электронный модуль 100 управления (ECU) управляет приведением в действие SR-электромотора 1. Электронный модуль 100 управления включает в себя CPU, модуль хранения и модуль вычисления. Модуль хранения сохраняет данные, к примеру, различные программы. Модуль вычисления выполняет различные вычисления для управления приведением в действие SR-электромотора 1. В результате вычислений в модуле вычисления, сигналы команд управления для управления инвертором 2 выводятся из электронного модуля 100 управления в инвертор 2. Таким образом, электронный модуль 100 управления управляет напряжением и током, которые прикладываются к SR-электромотору 1, посредством управления инвертором 2.
Электронный модуль 100 управления соединяется с датчиком 51 частоты вращения, датчиком 52 рабочей величины нажатия педали акселератора, датчиком 53 скорости транспортного средства и температурным датчиком 54. Датчик 51 частоты вращения, в частности, формируется из кругового датчика позиции. Датчик 51 частоты вращения определяет частоту вращения ротора 20 SR-электромотора 1 и выводит определенный сигнал (сигнал кругового датчика позиции) в электронный модуль 100 управления. Датчик 52 рабочей величины нажатия педали акселератора определяет величину нажатия педали акселератора водителем и выводит определенный сигнал в электронный модуль 100 управления. Датчик 53 скорости транспортного средства определяет скорость движения транспортного средства и выводит определенный сигнал в электронный модуль 100 управления. Температурный датчик 54 определяет температуру катушек 12 и выводит определенный сигнал в электронный модуль 100 управления.
Электронный модуль 100 управления идентифицирует относительную позиционную взаимосвязь между зубьями 11 статора и зубьями 21 ротора в направлении вращения на основе определенного сигнала, который вводится из датчика 51 частоты вращения, и выполняет управление для многократного переключения катушки 12 с возможностью подачи энергии в единицах фазы на основе позиционной взаимосвязи. При этом управлении, электронный модуль 100 управления возбуждает зубья 11 статора посредством пропускания тока через одну фазную катушку 12 и формирует магнитное притяжение между зубьями 11 статора и зубьями 21 ротора, расположенными около зубьев 11 статора, за счет этого инструктируя ротору 20 вращаться.
Как показано на фиг. 4, электронный модуль 100 управления начинает пропускание тока в катушку 12, которая должна возбуждаться, когда угол вращения любого из зубьев 21 ротора входит в диапазон возбуждения, т.е. когда угол вращения становится углом включения (углом начала возбуждения). Электронный модуль 100 управления задает нуль для тока, пропускаемого через катушку 12, которая должна возбуждаться, когда угол вращения любого из зубьев 21 ротора выходит из диапазона возбуждения, т.е. когда угол вращения становится углом выключения (углом прекращения возбуждения). Как показано на фиг. 4, диапазон возбуждения не означает диапазон (A1+A2+A3), в котором ток пропускается через катушку 12, а диапазон возбуждения означает диапазон углов вращения ротора 20 от угла включения до угла выключения, т.е. диапазон (A1+A2) от начала возбуждения любой из катушек 12 до прекращения возбуждения.
Когда угол вращения любого из зубьев 21 ротора попадает в диапазон A1, электронный модуль 100 управления выполняет режим положительного напряжения, в котором положительное напряжение прикладывается к катушке 12, намотанной вокруг зубьев 11 статора, которая должна возбуждаться, и управляет током таким образом, что ток увеличивается до целевого значения тока.
Когда угол вращения любого из зубьев 21 ротора попадает в диапазон A2, электронный модуль 100 управления попеременно выполняет режим положительного напряжения и режим рециркуляции для катушки 12, намотанной вокруг зубьев 11 статора, которая должна возбуждаться, и управляет током таким образом, что ток становится абсолютной величиной около целевого значения тока. Режим рециркуляции означает режим управления, в котором напряжение не прикладывается к катушке 12, и ток рециркулирует в инверторе 2 через катушку 12.
Когда угол вращения любого из зубьев 21 ротора попадает в диапазон A3, электронный модуль 100 управления выполняет режим отрицательного напряжения, в котором отрицательное напряжение прикладывается к катушке 12, намотанной вокруг зубьев 11 статора, которая должна возбуждаться, и управляет током таким образом, что ток становится нулевым.
Электронный модуль 100 управления выполняет первое управление и второе управление в качестве управления по току SR-электромотора 1. Первое управление представляет собой управление по току, которое выполняется во время нормального движения. Первое управление означает управление для возбуждения трех фазных катушек 12 (в частности, фазной катушки 12, которая должна возбуждаться из числа трех фазных катушек 12) при заданном целевом значении тока в заданном диапазоне возбуждения, как показано на фиг. 5. При первом управлении, чтобы удовлетворять движущей силе, которая требуется во время нормального движения, три фазные катушки 12 возбуждаются при целевом значении тока, которое должен выводить SR-электромотор 1. Фиг. 5 визуально показывает взаимосвязь между диапазоном возбуждения катушки 12 и целевым значением тока и не показывает форму сигнала тока (см. фиг. 4 на предмет формы сигнала тока).
Второе управление представляет собой управление по току, которое выполняется, когда транспортное средство не может начинать движение, даже когда выполняется первое управление. Второе управление означает управление для возбуждения трех фазных катушек 12 (в частности, фазной катушки 12, которая должна возбуждаться из числа трех фазных катушек 12) при значении тока, большем значения тока первого управления, в диапазоне возбуждения, более узком, чем диапазон возбуждения первого управления, как показано на фиг. 5. Как описано ниже, электронный модуль 100 управления выполняет второе управление только тогда, когда температура фазной катушки 12, имеющей индуктивность с положительным градиентом, ниже или равна заданному пороговому значению (см. этап S5 по фиг. 6 (описан ниже)). В настоящем варианте осуществления, когда второе управление выполняется вместо первого управления при заданном условии, можно уменьшать выработку тепла катушек 12 и также улучшать пусковые качества транспортного средства. Второе управление выполняется не только тогда, когда транспортное средство не может начинать движение с полным нажатием педали акселератора, но также и тогда, когда транспортное средство не может начинать движение с постоянным нажатием педали акселератора.
В настоящем варианте осуществления, диапазон возбуждения во время первого управления задается как первый диапазон возбуждения, и целевое значение тока во время первого управления задается как первое значение тока. Диапазон возбуждения во время второго управления задается как второй диапазон возбуждения, и целевое значение тока во время второго управления задается как второе значение тока. В настоящем варианте осуществления, общая величина тока в первом диапазоне возбуждения во время первого управления равна общей величине тока во втором диапазоне возбуждения во время второго управления. Таким образом, даже когда второе управление выполняется вместо первого управления, можно увеличивать крутящий момент при поддержании количества выработки тепла катушки 12 на уровне, идентичном уровню первого управления.
Целевое значение тока каждого первого управления и второго управления описывается на карте условий возбуждения (не показана), например, вместе с углом включения (углом начала возбуждения) и углом выключения (углом прекращения возбуждения) в соответствующем диапазоне возбуждения. Во время управления приведением в действие SR-электромотора 1 (описано ниже), электронный модуль 100 управления извлекает требуемую движущую силу на основе рабочей величины нажатия педали акселератора, определенной посредством датчика 52 рабочей величины нажатия педали акселератора, и загружает карту условий возбуждения, подходящую для требуемой движущей силы. Таким образом, электронный модуль 100 управления определяет целевое значение тока для соответствующего одного из первого управления и второго управления.
Как описано ниже, электронный модуль 100 управления выполняет первое управление тремя фазными катушками 12. Когда электронный модуль 100 управления определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль 100 управления выполняет первое управление, электронный модуль 100 управления выполняет второе управление фазной катушкой 12, имеющей индуктивность с положительным градиентом, и выполняет первое управление фазной катушкой 12, имеющей индуктивность с отрицательным градиентом (см. этап S3, этап S4, этап S7, этап S9 и этап S10 по фиг. 6 (описаны ниже)). Таким образом, контроллер для SR-электромотора 1 может эффективно увеличивать крутящий момент посредством выполнения второго управления только фазной катушкой 12, имеющей индуктивность с положительным градиентом.
Когда электронный модуль 100 управления определяет то, что имеется множество (например, два) фазных катушек 12, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль 100 управления выполняет второе управление одной из фазных катушек 12, имеющих индуктивность с положительным градиентом, электронный модуль 100 управления выполняет второе управление множеством фазных катушек 12, имеющих индуктивность с положительным градиентом, и выполняет первое управление оставшейся фазной катушкой 12 (например, одной фазной катушкой), имеющей индуктивность с отрицательным градиентом (см. этап S6, этап S8 и этап S9 по фиг. 6 (описаны ниже)). Таким образом, контроллер для SR-электромотора 1 может еще более надежно инструктировать транспортному средству начинать движение посредством выполнения второго управления множеством фазных катушек 12, имеющих индуктивность с положительным градиентом.
Когда электронный модуль 100 управления определяет то, что имеется множество (например, два) фазных катушек 12, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство может начинать движение посредством выполнения второго управления одной из фазных катушек 12, имеющих индуктивность с положительным градиентом, электронный модуль 100 управления выполняет второе управление одной из фазных катушек 12, имеющих индуктивность с положительным градиентом и с наибольшим градиентом, и выполняет первое управление оставшимися фазными катушками 12 (например, двумя фазными катушками) (см. этап S6, этап S8 и этап S10 по фиг. 6 (описаны ниже)). Таким образом, контроллер для SR-электромотора 1 может еще более эффективно увеличивать крутящий момент посредством выполнения второго управления одной из фазных катушек 12, имеющих индуктивность с положительным градиентом и с наибольшим градиентом.
В дальнейшем в этом документе описывается способ управления приведением в действие с помощью контроллера для SR-электромотора 1 согласно настоящему варианту осуществления со ссылкой на фиг. 6 в фиг. 9. Во время нормального движения транспортного средства, т.е. в начале фиг. 6, электронный модуль 100 управления выполняет первое управление.
Первоначально, электронный модуль 100 управления загружает различные фрагменты информации, которые используются при управлении приведением в действие SR-электромотора 1, как показано на фиг. 6 (этап S1). Различные фрагменты информации, в частности, означают частоту вращения и угол вращения (фазу) ротора 20 на основе определенного сигнала датчика 51 частоты вращения. Хотя не показано на фиг. 6, электронный модуль 100 управления извлекает требуемую движущую силу на основе рабочей величины нажатия педали акселератора, определенной посредством датчика 52 рабочей величины нажатия педали акселератора, и загружает карту условий возбуждения на этапе S1.
Затем, электронный модуль 100 управления загружает температуру трех фазных катушек 12 на основе определенного сигнала температурного датчика 54 (этап S2). Затем, электронный модуль 100 управления определяет то, движется или нет транспортное средство в направлении движения, на основе определенного сигнала датчика 53 скорости транспортного средства (этап S3). Состояние, в котором транспортное средство не движется в направлении движения, включает в себя состояние, в котором транспортное средство остановлено, например, на дороге с подъемом и т.п., и состояние, в котором транспортное средство движется в направлении, противоположном направлению движения (состояние, в котором транспортное средство скатывается).
Когда на этапе S3 определяется то, что транспортное средство не движется в направлении движения ("Нет" на этапе S3), электронный модуль 100 управления определяет то, выше или равна либо нет рабочая величина нажатия педали акселератора, определенная посредством датчика 52 рабочей величины нажатия педали акселератора, предварительно установленному пороговому значению (первому пороговому значению) (этап S4).
Когда этапе S4 определяется то, что рабочая величина нажатия педали акселератора выше или равна предварительно установленному пороговому значению (первому пороговому значению) ("Да" на этапе S4), электронный модуль 100 управления определяет то, ниже или равна либо нет температура каждой фазной катушки 12, имеющей индуктивность с положительным градиентом, предварительно установленному пороговому значению (второму пороговому значению) (этап S5). В настоящем варианте осуществления, случай, в котором транспортное средство не движется в направлении движения ("Нет" на этапе S3), и рабочая величина нажатия педали акселератора выше или равна первому пороговому значению ("Да" на этапе S4), соответствует случаю, в котором транспортное средство не может начинать движение.
Когда на этапе S5 определяется то, что температура каждой фазной катушки 12, имеющей индуктивность с положительным градиентом, ниже или равна предварительно установленному пороговому значению (второму пороговому значению) ("Да" на этапе S5), электронный модуль 100 управления определяет то, составляет или нет число фазных катушек 12, имеющих индуктивность с положительным градиентом, только одну (этап S6).
Когда на этапе S6 определяется то, что число фазных катушек 12, имеющих индуктивность с положительным градиентом, составляет только одну ("Да" на этапе S6), электронный модуль 100 управления выполняет второе управление фазной катушкой 12, имеющей индуктивность с положительным градиентом, и продолжает первое управление двумя фазными катушками 12, имеющими индуктивность с отрицательным градиентом (этап S7), после чего электронный модуль 100 управления завершает процесс. На этапе S7, в частности, электронный модуль 100 управления выполняет второе управление одной фазной катушкой, имеющей индуктивность с положительным градиентом, и выполняет первое управление двумя фазными катушками, имеющими индуктивность с отрицательным градиентом, до тех пор, пока транспортное средство не движется в направлении движения, и переключается на первое управление всеми фазными катушками после того, как транспортное средство движется в направлении движения, после чего электронный модуль 100 управления завершает процесс.
Независимое от фазы управление по току, показанное на этапе S6 и этапе S7, выполняется, поскольку SR-электромотор 1 может приводиться в действие с помощью одной фазы, и не выполняется, например, для PM-электромотора, который не может приводиться в действие с помощью одной фазы.
На вышеописанном этапе S6, электронный модуль 100 управления, например, выполняет второе управление катушкой 12 V-фазы, имеющей индуктивность с положительным градиентом, и продолжает первое управление катушками 12 U-фазы и W-фазы, имеющими индуктивность с отрицательным градиентом, как показано на фиг. 7. Как показано на фиг. 7, градиент означает наклон индуктивности до угла θ вращения ротора 20.
Когда на этапе S6 определяется то, что число фазных катушек 12, имеющих индуктивность с положительным градиентом, не составляет только одну ("Нет" на этапе S6), электронный модуль 100 управления определяет то, может или нет транспортное средство начинать движение посредством выполнения второго управления одной из фазных катушек 12, имеющих индуктивность с положительным градиентом (этап S8).
Когда на этапе S8 определяется то, что транспортное средство не может начинать движение посредством выполнения второго управления одной из фазных катушек 12, имеющих индуктивность с положительным градиентом ("Нет" на этапе S8), электронный модуль 100 управления выполняет второе управление двумя фазными катушками 12, имеющими индуктивность с положительным градиентом, и продолжает первое управление одной фазной катушкой 12, имеющей индуктивность с отрицательным градиентом (этап S9), после чего электронный модуль 100 управления завершает процесс. На этапе S9, в частности, электронный модуль 100 управления выполняет второе управление двумя фазными катушками, имеющими индуктивность с положительным градиентом, и выполняет первое управление одной фазной катушкой, имеющей индуктивность с отрицательным градиентом, до тех пор, пока транспортное средство не движется в направлении движения, и переключается на первое управление всеми фазными катушками после того, как транспортное средство движется в направлении движения, после чего электронный модуль 100 управления завершает процесс.
На вышеописанном этапе S8 и этапе S9, электронный модуль 100 управления, например, выполняет второе управление катушками 12 V-фазы и U-фазы, имеющими индуктивность с положительным градиентом, и продолжает первое управление катушкой 12 W-фазы, имеющей индуктивность с отрицательным градиентом, как показано на фиг. 8.
Когда на этапе S8 определяется то, что транспортное средство может начинать движение посредством выполнения второго управления одной из фазных катушек 12, имеющих индуктивность с положительным градиентом ("Да" на этапе S8), электронный модуль 100 управления выполняет второе управление одной из фазных катушек 12, имеющих индуктивность с положительным градиентом и с наибольшим градиентом, продолжает первое управление оставшимися фазными катушками 12 (например, двумя фазными катушками 12) (этап S10), после чего электронный модуль 100 управления завершает процесс. На этапе S10, в частности, электронный модуль 100 управления выполняет второе управление одной из фазных катушек, имеющих индуктивность с положительным градиентом и с наибольшим градиентом, и выполняет первое управление оставшимися двумя фазными катушками до тех пор, пока транспортное средство не движется в направлении движения, и переключается на первое управление всеми фазными катушками после того, как транспортное средство движется в направлении движения, после чего электронный модуль 100 управления завершает процесс.
На вышеописанном этапе S8 и этапе S10, электронный модуль 100 управления, например, выполняет второе управление катушкой 12 V-фазы, имеющей индуктивность с положительным градиентом и с наибольшим градиентом, и продолжает первое управление катушкой 12 U-фазы, имеющей индуктивность с положительным градиентом и с не наибольшим градиентом, и катушкой 12 W-фазы, имеющей индуктивность с отрицательным градиентом, как показано на фиг. 8. Как показано на фиг. 8, когда имеется множество фазных катушек 12, имеющих индуктивность с положительным градиентом, SR-электромотор 1 формирует больший крутящий момент, когда возбуждается фазная катушка 12, имеющая индуктивность с большим градиентом (катушка 12 V-фазы), чем тогда, когда возбуждается фазная катушка 12, имеющая индуктивность с меньшим градиентом (катушка 12 U-фазы).
Когда на вышеописанном этапе S3 определяется то, что транспортное средство движется в направлении движения ("Да" на этапе S3), либо когда на вышеописанном этапе S4 определяется то, что рабочая величина нажатия педали акселератора ниже предварительно установленного порогового значения (первого порогового значения) ("Нет" на этапе S4), либо когда на вышеописанном этапе S5 определяется то, что температура каждой фазной катушки 12, имеющей индуктивность с положительным градиентом, превышает предварительно установленное пороговое значение (второе пороговое значение) ("Нет" на этапе S5), электронный модуль 100 управления продолжает первое управление всеми фазными катушками 12 (этап S11), после чего электронный модуль 100 управления завершает процесс.
Как описано выше, когда транспортное средство не начинает движение, даже когда первое управление для возбуждения катушек 12 при заданном значении тока в заданном диапазоне возбуждения выполняется, контроллер для SR-электромотора 1 согласно настоящему варианту осуществления выполняет второе управление для возбуждения одной или двух катушек 12 при значении тока, большем значения тока первого управления, в диапазоне возбуждения, более узком, чем диапазон возбуждения первого управления. Таким образом, контроллер может уменьшать выработку тепла катушек 12 по сравнению со случаем, в котором одна или две катушки 12 возбуждаются при значении тока, большем значения тока первого управления, в диапазоне возбуждения, идентичном диапазону возбуждения первого управления. Следовательно, с помощью контроллера для SR-электромотора 1, можно улучшать пусковые качества транспортного средства при уменьшении выработки тепла катушек 12. Таким образом, можно уменьшать количество выработки тепла катушек 12 и также улучшать пусковые качества транспортного средства. С помощью контроллера для SR-электромотора 1, например, не требуется увеличивать размер охлаждающего устройства для того, чтобы уменьшать выработку тепла.
В дальнейшем в этом документе описывается транспортное средство, к которому применяется контроллер для SR-электромотора 1 согласно настоящему варианту осуществления, со ссылкой на фиг. 9. Транспортное средство 200, показанное на фиг. 9, включает в себя двигатель 201 (сокращенно "E/G" на фиг. 9), колеса 202, трансмиссию 203 (сокращенно "T/M" на фиг. 9), дифференциальную шестерню 204, ведущие валы 205 и SR-электромоторы 1 (сокращенно "SRM" на фиг. 1 и фиг. 9), которые служат в качестве источников мощности для приведения в движение транспортного средства 200. Транспортное средство 200 представляет собой транспортное средство с приводом на четыре колеса. Двигатель 201 приводит в движение правое и левое передние колеса 202FR, 202FL. SR-электромоторы 1 представляют собой задние электромоторы и приводят в движение правое и левое задние колеса 202RR, 202RL.
SR-электромоторы 1 представляют собой так называемые встроенные в колесо электромоторы и, соответственно, предоставляются по одному на правом и левом задних колесах 202RR, 202RL. В заднем модуле привода транспортного средства 200, левый задний SR-электромотор 1RL соединяется с левым задним колесом 202RL, и правый задний SR-электромотор 1RR соединяется с правым задним колесом 202RR. Правое и левое задние колеса 202RR, 202RL являются вращающимися независимо друг от друга.
Левое заднее колесо 202RL приводится в движение посредством крутящего момента (крутящего момента электромотора), выводимого из левого заднего SR-электромотора 1RL. Правое заднее колесо 202RR приводится в движение посредством крутящего момента (крутящего момента электромотора), выводимого из правого заднего SR-электромотора 1RR.
Левый задний SR-электромотор 1RL и правый задний SR-электромотор 1RR соединяются с аккумулятором 4 через инвертор 2. Левый задний SR-электромотор 1RL выступает в качестве электромотора с электрической мощностью, которая подается из аккумулятора 4, и также выступает в качестве генератора, который преобразует крутящий момент (внешнюю силу), который передается из заднего колеса 202RL, в электрическую мощность. Правый задний SR-электромотор 1RR выступает в качестве электромотора с электрической мощностью, которая подается из аккумулятора 4, и также выступает в качестве генератора, который преобразует крутящий момент (внешнюю силу), который передается из заднего колеса 202RR, в электрическую мощность. Инвертор 2 включает в себя электрическую схему для левого заднего SR-электромотора 1RL и электрическую схему для правого заднего SR-электромотора 1RR.
Электронный модуль 100 управления управляет левым задним SR-электромотором 1RL, правым задним SR-электромотором 1RR и двигателем 201. Например, электронный модуль 100 управления включает в себя электронный модуль управления SR-электромотора (ECU SR-электромотора) и электронный модуль управления двигателя (ECU двигателя). В этом случае, ECU двигателя выполняет управление крутящим моментом двигателя посредством управления всасываемым воздухом, управления впрыском топлива, управления зажиганием и т.п. Управление крутящим моментом двигателя представляет собой управление для регулирования выходного крутящего момента двигателя 201 до значения целевого крутящего момента. ECU SR-электромотора выполняет управление электромотором для левого заднего SR-электромотора 1RL и правого заднего SR-электромотора 1RR на основе сигнала кругового датчика позиции, который вводится из датчика 51 частоты вращения. Датчик 51 частоты вращения включает в себя левый задний датчик 51RL частоты вращения и правый задний датчик 51RR частоты вращения. Левый задний датчик 51RL частоты вращения определяет частоту вращения левого заднего SR-электромотора 1RL. Правый задний датчик 51RR частоты вращения определяет частоту вращения правого заднего SR-электромотора 1RR.
Контроллер для переключаемого реактивного электромотора согласно изобретению подробно описывается посредством варианта осуществления изобретения; тем не менее, изобретение не ограничено вышеописанной конфигурацией. Изобретение должно интерпретироваться широко на основе утверждений прилагаемой формулы изобретения. Конечно, изобретение охватывает различные модификации, изменения и т.п., на основе этих утверждений.
Например, в контроллере для SR-электромотора 1 согласно настоящему варианту осуществления, понижающий модуль (понижающий преобразователь), который понижает напряжение, которое прикладывается к SR-электромотору 1, может предоставляться вместо повышающего модуля 3 (см. фиг. 1).
Пример варианта применения контроллера для SR-электромотора 1 согласно варианту осуществления не ограничен примером варианта применения, показанным на фиг. 9 (в дальнейшем в этом документе называемым "примером 1 варианта применения"). Например, в примере варианта применения контроллера для SR-электромотора 1, в отличие от примера 1 варианта применения, SR-электромотор 1 может предоставляться на каждом из колес 202 (пример 2 варианта применения). Альтернативно, в отличие от примера 1 варианта применения, может применяться транспортное средство с приводом на задние колеса, в котором не предоставляется модуль переднего привода (пример 3 варианта применения).
В примере варианта применения контроллера для SR-электромотора 1, в отличие от примеров 1-3 вариантов применения, источник мощности для приведения в движение транспортного средства 200 представляет собой только SR-электромоторы 1, которые служат в качестве встроенных в колесо электромоторов (пример 4 варианта применения). В отличие от примера 4 варианта применения, SR-электромоторы 1 могут отличаться от встроенных в колесо электромоторов (пример 5 варианта применения).
В примере варианта применения контроллера для SR-электромотора 1, в отличие от примера 5 варианта применения, конструкция примера 1 варианта применения может монтироваться в качестве модуля переднего привода (пример 6 варианта применения). В отличие от примера 3 варианта применения, модуль заднего привода может не предоставляться, либо в отличие от примера 4 варианта применения, размещение модулей переднего и заднего привода может быть противоположным (пример 7 варианта применения).
Изобретение относится к контроллеру для переключаемого реактивного электромотора, который монтируется на транспортном средстве, и предназначено для улучшения пусковых качеств транспортного средства. Переключаемый реактивный электромотор включает в себя ротор, статор и катушку, намотанную на статор. Переключаемый реактивный электромотор монтируется на транспортном средстве в качестве источника приведения в движение для приведения в движение транспортного средства. Контроллер включает в себя электронный модуль управления. Электронный модуль управления выполнен с возможностью выполнять первое управление для возбуждения катушки при первом значении тока в первом диапазоне возбуждения. Электронный модуль управления выполнен с возможностью, когда электронный модуль управления определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет первое управление, выполнять второе управление для возбуждения катушки при втором значении тока, большем первого значения тока, во втором диапазоне возбуждения, более узком, чем первый диапазон возбуждения. 7 з.п. ф-лы, 9 ил.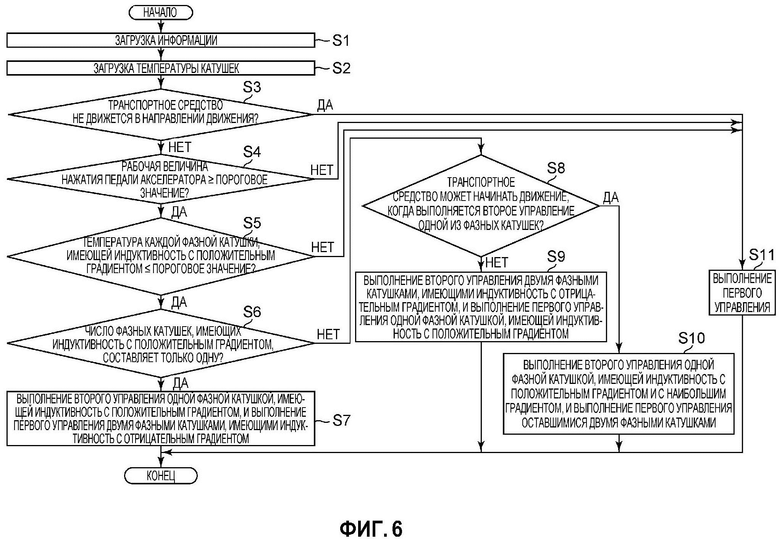
1. Контроллер для переключаемого реактивного электромотора, включающего в себя ротор, статор и катушку, намотанную на статор, причем переключаемый реактивный электромотор монтируется на транспортном средстве в качестве приводного источника для приведения в движение транспортного средства, при этом контроллер содержит электронный модуль управления, выполненный с возможностью:
выполнения первого управления для возбуждения катушки при первом значении тока в первом диапазоне возбуждения; и
выполнения второго управления для возбуждения катушки при втором значении тока, большем первого значения тока, во втором диапазоне возбуждения, более узком, чем первый диапазон возбуждения, когда электронный модуль управления определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет первое управление.
2. Контроллер по п. 1, в котором каждый из первого и второго диапазонов возбуждения представляет собой диапазон угла вращения ротора от начала возбуждения катушки до прекращения возбуждения.
3. Контроллер по п. 1, в котором электронный модуль управления выполнен с возможностью:
выполнения второго управления фазной катушкой или множеством фазных катушек, имеющих индуктивность с положительным градиентом; и
выполнения первого управления фазной катушкой или множеством фазных катушек, имеющих индуктивность с отрицательным градиентом.
4. Контроллер по п. 3, в котором:
индуктивность увеличивается по мере того, как увеличивается угол вращения ротора, в случае индуктивности с положительным градиентом; и
индуктивность снижается по мере того, как увеличивается угол вращения ротора, в случае индуктивности с отрицательным градиентом.
5. Контроллер по п. 3, в котором электронный модуль управления выполнен с возможностью:
когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом, выполнения второго управления множеством фазных катушек, имеющих индуктивность с положительным градиентом; и,
когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство не может начинать движение, даже когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом, выполнения первого управления фазной катушкой, имеющей индуктивность с отрицательным градиентом в катушке.
6. Контроллер по п. 3, в котором электронный модуль управления выполнен с возможностью:
когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство может начинать движение, когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом, выполнения второго управления одной из множества фазных катушек, имеющих индуктивность с положительным градиентом и с наибольшим градиентом; и,
когда электронный модуль управления определяет то, что имеется множество фазных катушек, имеющих индуктивность с положительным градиентом, и определяет то, что транспортное средство может начинать движение, когда электронный модуль управления выполняет второе управление одной из множества фазных катушек, имеющих индуктивность с положительным градиентом, выполнения первого управления множеством фазных катушек в катушке.
7. Контроллер по любому из пп. 1-6, в котором электронный модуль управления выполнен с возможностью выполнения второго управления только тогда, когда температура фазной катушки или множества фазных катушек, имеющих индуктивность с положительным градиентом, ниже или равна заданному пороговому значению.
8. Контроллер по любому из пп. 1-6, в котором общая величина тока в первом диапазоне возбуждения первого управления равна общей величине тока во втором диапазоне возбуждения второго управления.
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ СРЕДСТВОМ | 2016 |
|
RU2630258C2 |
| Пневматический тормозной привод автомобиля-тягача | 1986 |
|
SU1391980A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ДЛЯ ГИБРИДНОГО ТРАНСПОРТНОГО СРЕДСТВА | 2012 |
|
RU2568530C2 |
| US 2014217946 A1, 07.08.2014. | |||

