Изобретение относится к области информационно-измерительной и вычислительной техники и может быть использовано в электроэнергетике для контроля усредненных значений частоты в промышленных трехфазных электрических сетях.
Известен способ определения частоты при помощи цифрового измерителя частоты (Патент 1290190 РФ, МПК G01R 23/00. 1987, бюл. №6). Цифровой измеритель частоты содержит формирователь интервала измерения, генератор образцовых частот, счетчики импульсов, сумматор, блок индикации, элемент задержки, RS-триггер, ключ, регистр, D-триггер, двухвходовой элемент И.
Недостатком способа определения частоты и измерителя является значительное время усреднения (счета), необходимое для получения требуемой точности измерений.
К аналогам предлагаемого технического решения также относится способ измерения частоты при помощи устройства для измерения частоты синусоидального сигнала (Патент РФ №2169927, МКП G01R 23/00, 2001, бюл. №18). Устройство для измерения частоты синусоидального сигнала содержит генератор импульсов, распределитель импульсов, счетчик импульсов, регистр, цифровые индикаторы, входной формирователь импульсов, выпрямитель, n входных формирователей импульсов, (n+1) выходных формирователей импульсов, источник опорных напряжений, элемент ИЛИ.
Недостатками данного способа измерения частоты и устройства являются значительное время измерения, а также невысокая точность.
Прототипом является способ измерения частоты трехфазного напряжения при помощи устройства измерения частоты (US №8190387 B2, МПК G01R 23/00, 29.05.2012), предназначенный для измерения промышленной частоты 50 или 60 герц, в котором подсчитывается амплитуда переменного напряжения U(t) методом действующего значения, длину хорды, соединяющей вершины вектора напряжения U(t) в момент времени t и вектора напряжения U(t+dt) в момент времени (t+dt) с помощью метода действующего значения, фазовый угол dφ поворота вектора напряжения U(t) за время dt, откуда подсчитывают частоту F(t), вычисляют динамическую частоту для определения скорости изменения частоты для каждого шага dt.
Недостатком данного способа и устройства является то, что для определения фазового угла dφ поворота вектора напряжения U(t) за время dt используется одно напряжение U(t) промышленной частоты и используется метод действующего значения для подсчета амплитуды и длины хорды данного напряжения. При определении амплитуды и хорды метод действующего значения корректно работает только для сигнала, имеющего форму идеальной синусоиды. При любом отклонении формы сигнала напряжения U(t) от синусоидальной метод действующего значения будет давать ошибку.
Задача, решаемая изобретением, - повышение точности определения частоты трехфазного напряжения за счет отказа от метода действующего значения, а также использование для определения частоты сигналов всех трех фаз промышленного трехфазного напряжения.
Указанный технический результат достигается благодаря тому, что в способе определения частоты трехфазного напряжения, в котором для определения частоты F используют цифровые сигналы всех трех фаз Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=(ti-ti), причем величина dt значительно меньше периода Т наибольшей частоты Fb=1/T диапазона измерения, dt<<T, согласно изобретению определяют проекцию Ux(ti) на ось абсцисс X вращающегося поля U(ti), создаваемого тремя фазами Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, по формуле:
определяют проекцию Uy(ti) на ось абсцисс Y вращающегося поля U(ti):
Uy(ti)=(2·Ua(ti)-Ub(ti)-Uc(ti))/2,
определяют модуль вращающегося поля U(ti):
 ,
,
определяют зависимость от времени ti приращения фазы dφi вращающегося поля U(ti) за интервал dt=(ti-ti-1) по формуле:
|dφi|=|φ(ti)-φ(ti-1)|=arccos{[Ux(ti)·Ux(ti-1)+Uy(ti)·Uy(ti-1)]/[U(ti)·U(ti-1,)]},
определяют знак dcpj по следующему алгоритму:
- Если |Ux(ti)|≤|Uy(ti)|, то знак dφi равен знаку величины
Uy(ti)·[Ux(ti-1)-Ux(ti)],
- Если |Ux(ti)|>|Uy(ti)|, то знак dφi равен знаку величины
Ux(ti)·[Uy(ti)-Uy(ti-1)],
определяют среднее за интервал времени n·dt значение частоты F(ti) в момент времени ti по формуле:
 , где n - целое значение.
, где n - целое значение.
Существенным отличием предлагаемого технического решения является то, что весь процесс определения частоты производится в цифровом виде, используя выходные цифровые сигналы Ua(ti), Ub(ti), Uc(ti) АЦП, на вход которого подаются три фазы Ua, Ub, Uc промышленного трехфазного напряжения, где i - целое значение, измеренные в моменты времени ti, оцифрованные с периодом дискретизации dt=(ti-ti-1), причем величина dt значительно меньше периода Т наибольшей частоты Fb=1/T диапазона измерения dt<<T.
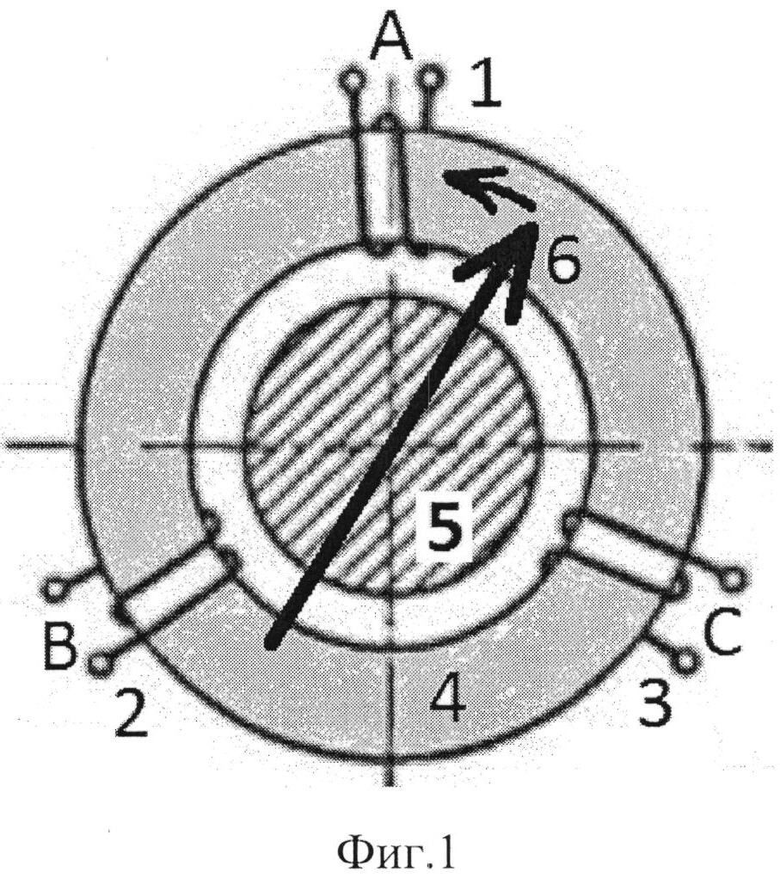
Предлагаемый способ определения частоты трехфазного напряжения поясняется с помощью прилагаемых чертежей (фиг. 1-3), на которых сделаны следующие обозначения.
- Катушки статора двигателя фазы А (1), В (2), С (3), к которым подключено трехфазное напряжение Ua, Ub, Uc.
- Катушки статора двигателя А (1), В(2), С(3) намотаны на магнитопровод статора 4.
- Токи, протекающие по катушкам 1, 2, 3 создают в роторе 5 вращающееся поле U (6).
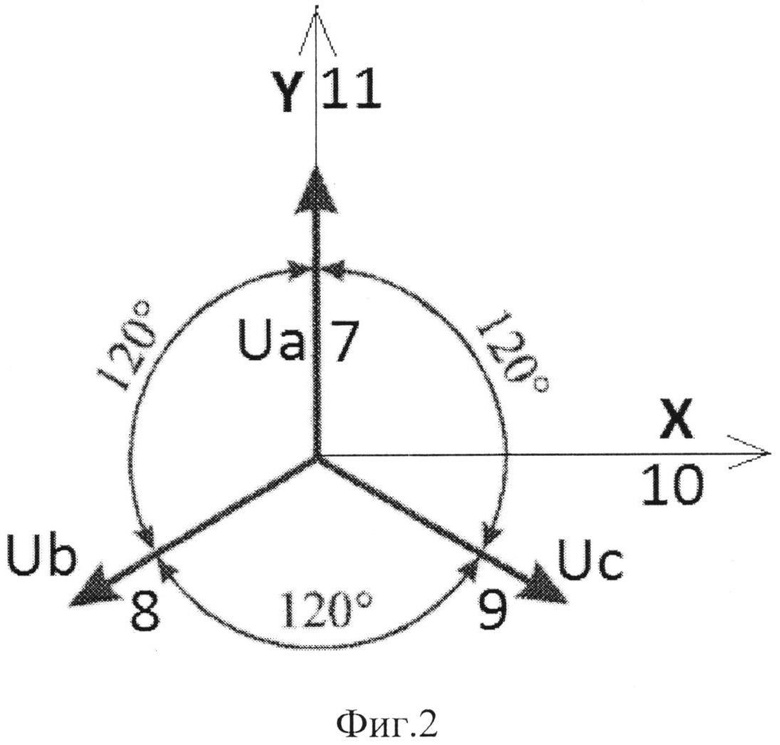
- Три вектора напряжения Ua (7), Ub (8), Uc (9), между которыми имеется угол 120 градусов, создают проекции на прямоугольную систему координат с осями X (10), Y (11).
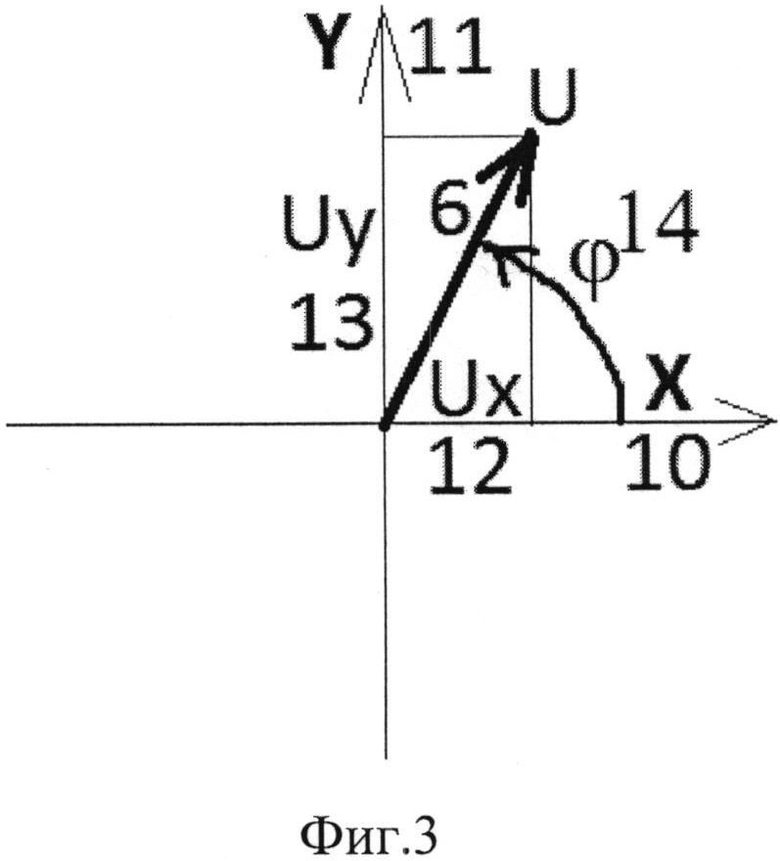
- Проекции векторов Ua (7), Ub (8), Uc (9) на оси X (10), Y (11) создают координаты Ux (12), Uy (13) вращающегося вектора U (6), который имеет угол φ (14) относительно оси X (10).
Сущность изобретения заключается в следующем.
Принцип работы промышленных трехфазных сетей 50 герц связан с подачей на двигатель трехфазного напряжения Ua (7), Ub (8), Uc (9). Токи, протекающие по катушкам фаз А (1), В (2), С (3) статора 4 двигателя, к которым подключено трехфазное напряжение Ua (7), Ub (8), Uc (9), создают в роторе 5 двигателя вращающееся поле U (6), последнее и вращает ротор 5 двигателя.
Соответственно частотой F трехфазной сети является частота вращения поля U (6), угол φ (14) которого относительно оси X (10) непрерывно увеличивается с вращением поля U (6). Увеличение угла φ (14) на угол 2π происходит за один оборот поля U (6), или за период T частоты F=1/T. Подсчитав скорость изменения угла φ (14), найдем частоту F трехфазного напряжения Ua (7), Ub (8), Uc (9).
Координаты Ux (12), Uy (13) вращающегося вектора U (6) получаются из проекций векторов Ua (7), Ub (8), Uc (9) на оси X (10), Y (11):
Ux=(Uc-Ub)·√3/2,
Uy=Ua-(Ub+Uc)/2.
Модуль (длина) вектора U (6) определяется из координат Ux (12), Uy (13):
U=√(U2x+U2y).
Для определения частоты F трехфазного напряжение Ua (7), Ub (8), Uc (9) в микропроцессорных терминалах используются цифровые сигналы всех трех фаз Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=(ti-ti-1). Причем величина dt значительно меньше периода T наибольшей частоты Fb=1/T диапазона измерения частоты F, dt<<T.
В каждый момент времени ti определяется проекция Ux(ti) на ось абсцисс X вращающегося поля U(ti), создаваемого тремя фазами Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, по формуле:
 ,
,
определяется проекция Uy(ti) на ось абсцисс Y вращающегося поля U(ti):
Uy(ti)=(2·Ua(ti)-Ub(ti)-Uc(ti))/2,
определяется модуль вращающегося поля U(ti):
,
определяется зависимость от времени ti приращения фазы dφi вращающегося поля U(ti) за интервал dt=(ti-ti-1) по формуле:
|dφi|=|φ(ti)-φ(ti-1)|=arccos{[Ux(ti)·Ux(ti-1)+Uy(ti)·Uy(ti-1)]/[U(ti)·U(ti-1)]}
Приращение dφi, вычисляемое с использованием тригонометрической функции arcos(), будет всегда положительным. Поэтому для определения знака dφi проведем дополнительные вычисления.
если |Ux(ti)|≤|Uy(ti)|, то знак dφi равен знаку величины
Uy(ti)·[Ux(ti-1)-Ux(ti)],
если |Ux(ti)|Uy(ti)|, то знак dφi равен знаку величины
Ux(ti)·[Uy(ti)-Uy(ti-1)].
Для повышения точности измерения частоты F(ti) определяется среднее за интервал времени n·dt значение частоты F(ti) в момент времени ti по формуле:
 , где n - целое значение.
, где n - целое значение.
Предлагаемый способ определения частоты трехфазного напряжения будет работать всегда, когда трехфазное напряжение формирует вращающееся поле, и не будет работать, если вращающееся поле не формируется (например, при потере двух фаз напряжения из трех).
Таким образом, предлагаемый способ определения частоты трехфазного напряжения позволяет за короткий интервал времени определить частоту трехфазного напряжения, которое непосредственно вращает роторы двигателей. При этом за счет использования всех трех фаз промышленного напряжения 50 герц повышается точность измерения частоты.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ СИНХРОНИЗАЦИИ ДВУХ ТРЕХФАЗНЫХ ЭЛЕКТРОЭНЕРГЕТИЧЕСКИХ СИСТЕМ | 2014 |
|
RU2566667C1 |
| Способ формирования сигнала, пропорционального обобщенному вектору трехфазной системы напряжений | 1989 |
|
SU1725165A1 |
| Цифровой генератор трехфазных синусоидальных сигналов | 1990 |
|
SU1797732A3 |
| СПОСОБ ОПРЕДЕЛЕНИЯ ЧАСТОТЫ ТРЕХФАЗНОГО НАПРЯЖЕНИЯ | 2014 |
|
RU2560145C1 |
| Способ регулирования установки продольной емкостной компенсации | 1990 |
|
SU1786591A1 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МГНОВЕННОЙ РЕАКТИВНОЙ МОЩНОСТИ ТРЕХФАЗНОЙ СЕТИ | 2016 |
|
RU2651809C1 |
| УСТРОЙСТВО для ОБНАРУЖЕНИЯ ЗАМЫКАНИЯ НА ЗЕМЛЮ | 1972 |
|
SU338004A1 |
| СПОСОБ ИЗМЕРЕНИЯ МГНОВЕННОГО КОЭФФИЦИЕНТА МОЩНОСТИ ТРЕХФАЗНОЙ СЕТИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2627986C1 |
| Устройство контроля угла между векторами напряжений в двух точках энергосистемы | 1991 |
|
SU1836770A3 |
| СПОСОБ СИНХРОНИЗАЦИИ СИНХРОННЫХ ГЕНЕРАТОРОВ | 2017 |
|
RU2652379C1 |
Изобретение относится к области информационно-измерительной и вычислительной техники и может быть использовано в электроэнергетике для контроля усредненных значений частоты в промышленных трехфазных электрических сетях. Согласно способу для определения частоты F используют цифровые сигналы всех трех фаз Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=(ti-ti-1). Причем величина dt значительно меньше периода Т наибольшей частоты Fb=1/T диапазона измерения, dt<<T. При этом определяют проекцию Ux(ti) на ось абсцисс X вращающегося поля U(ti), создаваемого тремя фазами Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, по формуле 


Способ определения частоты трехфазного напряжения, в котором для определения частоты F используют цифровые сигналы всех трех фаз Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=(ti-ti-1), причем величина dt значительно меньше периода Т наибольшей частоты Fb=1/T диапазона измерения, dt<<T, отличающийся тем, что
определяют проекцию Ux(ti) на ось абсцисс X вращающегося поля U(ti), создаваемого тремя фазами Ua(ti), Ub(ti), Uc(ti) промышленного трехфазного напряжения, по формуле:
определяют проекцию Uy(ti) на ось абсцисс Y вращающегося поля U(ti) по формуле:
определяют модуль вращающегося поля U(ti) по формуле:
определяют зависимость от времени ti приращения фазы dφi вращающегося поля U(ti) за интервал dt=(ti-ti-1) по формуле:
|dφi|=|φ(ti)-φ(ti-1)|=arccos{[Ux(ti)·Ux(ti-1)+Uy(ti)·Uy(ti-1)]/[U(ti)·U(ti-1)]},
определяют знак dφi по следующему алгоритму:
если |Ux(ti)|≤| Uy(ti)|, то знак dφi равен знаку величины
Uy(ti)·[Ux(ti-1)-Ux(ti)],
если |Ux(ti)>|Uy(ti)|, то знак dφi равен знаку величины
Ux(ti)·[Uy(ti)-Uy(ti-1)],
определяют среднее за интервал времени n·dt значение частоты F(ti) в момент времени ti по формуле:
| US 8190387 B2, 29.05.2012 | |||
| US 2004243329 A1, 02.12.2004 | |||
| US 2005151532 A1, 14.07.2005 | |||
| Цифровой измеритель частоты | 1983 |
|
SU1290190A1 |
| УСТРОЙСТВО ДЛЯ ИЗМЕРЕНИЯ ЧАСТОТЫ СИНУСОИДАЛЬНОГО СИГНАЛА | 1999 |
|
RU2169927C1 |

