Предлагаемое изобретение относится к электроэнергетике и может быть использовано для определения момента подачи команды включения выключателя, который соединяет две трехфазные электроэнергетические системы.
Известен способ синхронизации возбужденной синхронной машины с сетью (Константинов В.Н. Синхронизация судовых синхронных генераторов. - Л.: «Судостроение», 1965. - с. 256-267), заключающийся в том, что регулируют частоту возбужденной синхронной машины до совпадения частот машины и сети, ожидают момент совпадения фаз машины и сети и включают машину в сеть в момент совпадения фаз.
Недостатком известного способа является большая длительность синхронизации синхронной машины из-за длительности подготовки частоты и большого периода между моментами возникновения условий, допускающих включение возбужденной машины в сеть.
Известен способ синхронизации возбужденной синхронной машины с сетью (а.с. СССР 598179, H02J 3/42, 1967), заключающийся в том, что при развороте синхронной машины от нулевой частоты вращения путем фиксации действительного скольжения сравнивают его с заданным значением и, в зависимости от величины и знака полученной разности, воздействуют на изменение частоты вращения, причем заданное значение скольжения выбирают большим зоны нечувствительности регулятора скорости и меньшим половины допустимого значения скольжения по условию успешной синхронизации.
Недостатками известного способа являются трудность задания значения скольжения и большая длительность синхронизации синхронной машины из-за длительности подгонки частоты вращения синхронной машины.
Известен способ синхронизации возбужденной синхронной машины с сетью (патент РФ 2190917, МПК 7, H02J 3/42, опубл. 10.10.2002), выбранный в качестве прототипа, заключающийся в том, что регулируют частоту напряжения возбужденной синхронной машины в направлении сближения с частотой сети, измеряют разность фаз и включают возбужденную синхронную машину в сеть в момент совпадения фаз. При этом при частоте напряжения возбужденной синхронной машины ниже частоты сети увеличивают частоту возбужденной машины до уровня, большего, чем частота сети, а измерение разности фаз начинают, когда частота напряжения возбужденной синхронной машины станет больше частоты сети.
Основным недостатком известного способа является исключение операции точной подгонки частоты машины, а также необходимость ожидания момента совпадения фаз. При этом для синхронизации используется напряжение одной фазы трехфазного напряжения, что приводит к неконтролируемым толчкам тока по оставшимся двум фазам при включении выключателя, который соединяет две трехфазные электроэнергетические системы.
Технической задачей, решаемой изобретением, является улучшение параметров синхронизации двух трехфазных электроэнергетических систем увеличение, а именно повышение точности определения момента включения выключателя, включение выключателя с наименьшим суммарным по всем трем фазам толчком тока и автоматический контроль идентичности чередования фаз двух электроэнергетических систем.
Технический результат, заключающийся в повышении точности определения момента включения выключателя, достигается благодаря тому, что в способе синхронизации двух трехфазных электроэнергетических систем, в котором измеряют разность фаз между двумя трехфазными электроэнергетическими системами, для определения момента подачи команды включения выключателя, который соединяет две трехфазные электроэнергетические системы при разности частот двух систем меньше, чем заданное значение максимальной разности частот dωmax, и при разности амплитуд напряжений двух систем меньше, чем заданное значение максимальной разности амплитуд dUmax, и заданном значении времени включения выключателя Твкл используют цифровые сигналы всех трех фаз промышленного трехфазного напряжения первой Ua1(ti), Ub1(ti), Uc1(ti) и второй Ua2(ti), Ub2(ti), Uc2(ti) электроэнергетических систем, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=t(i+1)-ti, причем величина dt значительно меньше периода Τ промышленного трехфазного напряжения, dt<<T, исходя из цифровых сигналов всех трех фаз промышленного трехфазного напряжения двух систем определяют амплитуды напряжения первой Ua1, Ub1, Uc1 и второй Ua2, Ub2, Uc2 электроэнергетических систем, согласно изобретению определяют проекции Ux1(ti), Ux2(ti) на ось абсцисс X вращающихся полей U1(ti), U2(ti), создаваемых тремя фазами Ua1(ti), Ub1(ti), Uc1(ti) и Ua2(ti), Ub2(ti), Uc2(ti) промышленного трехфазного напряжения:

определяют проекции Uy1(ti), Uy2(ti) на ось абсцисс Υ вращающихся полей U1(ti), U2(ti):
Uy1(ti)=(2·Ua1(ti)-Ub1(ti)-Uc1(ti))/2, Uy2(ti)=(2·Ua2(ti)-Ub2(ti)-Uc2(ti))/2,
определяют модули вращающихся полей U1(ti), U2(ti):

определяют фазы φi1, φi2 вращающихся полей U1(ti), U2(ti):
φi1=k1·2π+k2·arccos{Ux1(ti)/U1(ti)}, φi2=k3·2π+k4·arccos{Ux2(ti)/U2(ti)},
где k1=0, k2=1 если Uy1(ti)≥0, иначе k1=1, k2=-1,
k3=0, k4=1 если Uy2(ti)≥0, иначе k3=1, k4=-1,
определяют модуль угла φi между двумя вращающимися полями U1(ti), U2(ti):
|φi|=|φi1-φi2|,
определяют ближайший угол αi между двумя вращающимися полями U1(ti), U2(ti):
αi=|φi|, если |φi|≤π, иначе αi=2π-|φi|,
определяют разность dωi частот вращения вращающихся полей U1(ti), U2(ti):
dωi=|[α(i+1)-αi]/dt|
определяют разности dUa, dUb, dUc амплитуд всех трех фаз двух систем:
dUa=|Ua1-Ua2|, dUb=|Ub1-Ub2|, dUc=|Uc1-Uc2|,
определяют максимальное значение dU разности амплитуд среди всех трех фаз двух систем:
dU = максимальное значение из (dUa, dUb, dUc),
определяют средние за интервал времени n·dt значения ближайшего угла α и разности частот dω между двумя вращающимися полями U1(ti), U2(ti):

и при выполнении обоих условий dω≤dωmax и dU≤dUmax подают команду включения выключателя, который соединяет две трехфазные электроэнергетические системы, в момент смены знака выражения (α-αmax) с положительного на отрицательный, где αmax=dω·Твкл.
Существенным отличием предлагаемого технического решения является то, что весь процесс точной синхронизации двух трехфазных электроэнергетических систем производится в цифровом виде, используя выходные цифровые сигналы АЦП всех трех фаз промышленного трехфазного напряжения первой Ua1(ti), Ub1(ti), Uc1(ti) и второй Ua2(ti), Ub2(ti), Uc2(ti) электроэнергетических систем, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=t(i+1)-ti, причем величина dt значительно меньше периода Τ промышленного трехфазного напряжения, dt<<T.
Предлагаемый способ синхронизации двух трехфазных электроэнергетических систем поясняется с помощью прилагаемых чертежей (фиг. 1-3), на которых сделаны следующие обозначения.
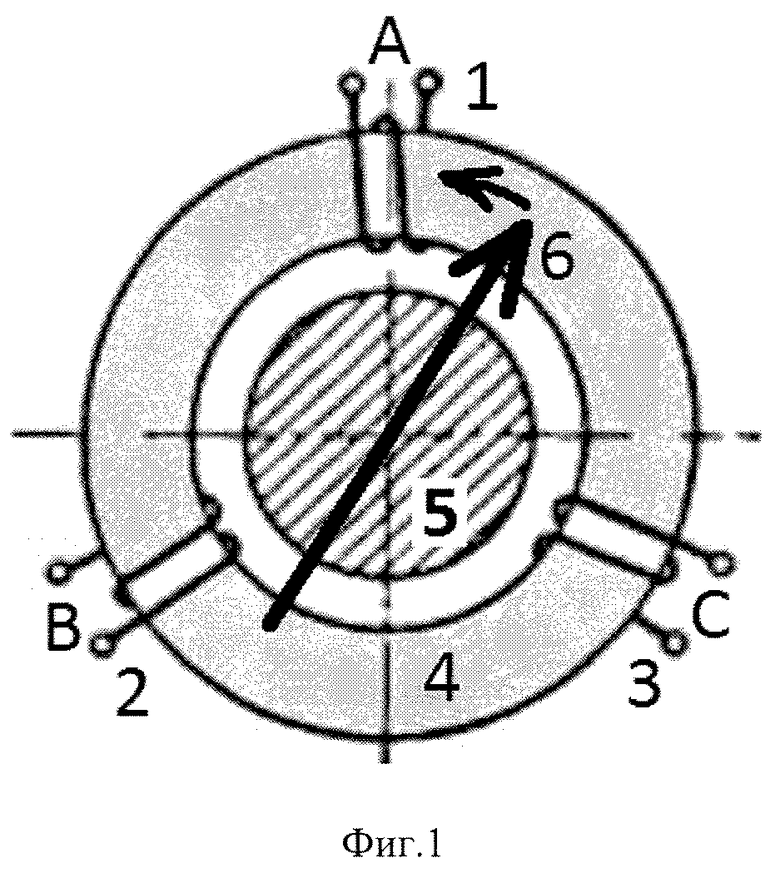
- Катушки статора двигателя фазы А (1), В (2), С (3), к которым подключено трехфазное напряжение Ua, Ub, Uc.
- Катушки статора двигателя А (1), В (2), С (3) намотаны на магнитопровод статора 4.
- Токи, протекающие по катушкам 1, 2, 3, создают в роторе 5 вращающееся поле U (6).
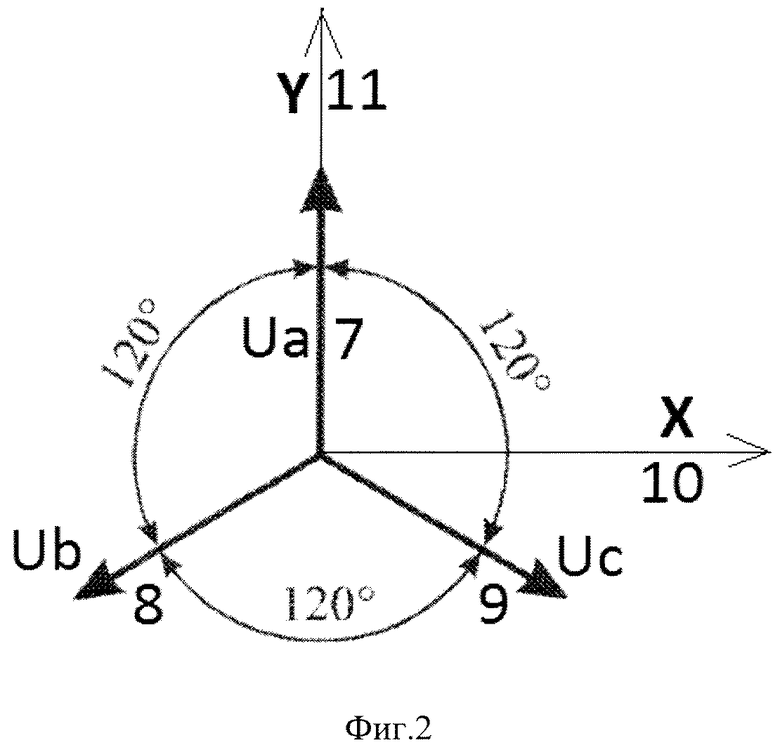
- Три вектора напряжения Ua (7), Ub (8), Uc (9), между которыми имеется угол 120 градусов, создают проекции на прямоугольную систему координат с осями X (10), Υ (11).
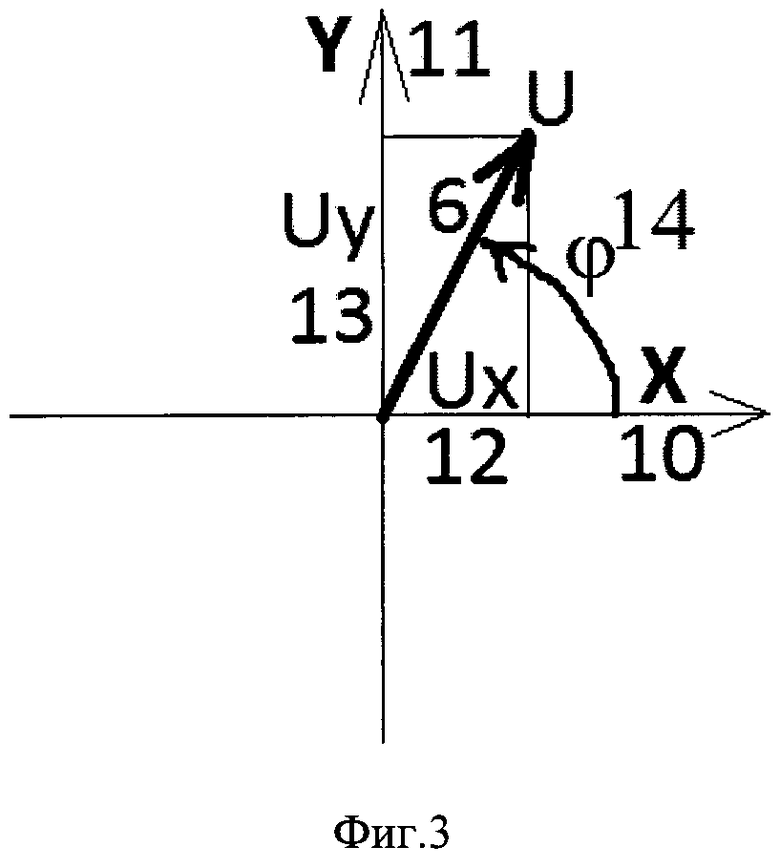
- Проекции векторов Ua (7), Ub (8), Uc (9) на оси Х(10), Υ (11) создают координаты Ux (12), Uy (13) вращающегося вектора U (6), который имеет угол φ (14) относительно оси X (10).
Сущность изобретения заключается в следующем. Принцип работы промышленных трехфазных сетей 50 герц связан с подачей на двигатель трехфазного напряжения Ua (7), Ub (8), Uc (9). Токи, протекающие по катушкам фаз А (1), В (2), С (3) статора 4 двигателя, к которым подключено трехфазное напряжение Ua (7), Ub (8), Uc (9), создают в роторе 5 двигателя вращающееся поле U (6), последнее и вращает ротор 5 двигателя.
Соответственно частотой F трехфазной сети является частота вращения поля U (6), угол φ (14) которого относительно оси X (10) непрерывно увеличивается с вращением поля U (6). Увеличение угла φ (14) на угол 2π происходит за один оборот поля U (6), или за период Τ частоты F=1/T.
Координаты Ux (12), Uy (13) вращающегося вектора U (6) получаются из проекций векторов Ua (7), Ub (8), Uc (9) на оси X (10), Υ (11):
Ux=(Uc-Ub)·√3/2,
Uy=Ua-(Ub+Uc)/2
Модуль (длина) вектора U (6) определяется из координат Ux (12), Uy (13):
U=√(U2x+U2y)
Весь процесс предлагаемого способа точной синхронизации производится в цифровом виде, используя выходные цифровые сигналы АЦП всех трех фаз промышленного трехфазного напряжения первой Ua1(ti), Ub1(ti), Uc1(ti) и второй Ua2(ti), Ub2(ti), Uc2(ti) электроэнергетических систем, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=t(i+1)-ti, причем величина dt значительно меньше периода Τ промышленного трехфазного напряжения, dt<<T.
Исходя из цифровых сигналов всех трех фаз промышленного трехфазного напряжения двух систем определяют амплитуды напряжения первой Ua1, Ub1, Uc1 и второй Ua2, Ub2, Uc2 электроэнергетических систем. В каждый момент времени ti определяются проекции Ux1(ti), Ux2(ti) на ось абсцисс X вращающихся полей U1(ti), U2(ti), создаваемых тремя фазами Ua1(ti), Ub1(ti), Uc1(ti) и Ua2(ti), Ub2(ti), Uc2(ti) промышленного трехфазного напряжения, по формуле:

определяются проекции Uy1(ti), Uy2(ti) на ось абсцисс Υ вращающихся полей U1(ti), U2(ti):
Uy1(ti)=(2·Ua1(ti)-Ub1(ti)-Uc1(ti))/2, Uy2(ti)=(2·Ua2(ti)-Ub2(ti)-Uc2(ti))/2,
определяются модули вращающихся полей U1(ti), U2(ti):

определяются фазы φi1, φi2 вращающихся полей U1(ti), U2(ti):
φi1=k1·2π+k2·arccos{Ux1(ti)/U1(ti)}, φi2=k3·2π+k4·arccos{Ux2(ti)/U2(ti)},
где k1=0, k2=1 если Uy1(ti)≥0, иначе k1=1, k2=-l,
k3=0, k4=1 если Uy2(ti)≥0, иначе k3=1, k4=-l,
определяют модуль угла φi между двумя вращающимися полями U1(ti), U2(ti):
|φi|=|φi1-φi2|,
определяют ближайший угол αi между двумя вращающимися полями U1(ti), U2(ti):
αi=|φi|, если |φi|≤π, иначе αi=2π-|φi|,
определяют разность dωi частот вращения вращающихся полей U1(ti), U2(ti):
dωi=|[α(i+1)-αi]/dt|
определяют разности dUa, dUb, dUc амплитуд всех трех фаз двух систем:
dUa=|Ua1-Ua2|, dUb=|Ub1-Ub2|, dUc=|Uc1-Uc2|,
определяют максимальное значение dU разности амплитуд среди всех трех фаз двух систем:
dU = максимальное значение из (dUa, dUb, dUc).
Для повышения точности измерений угла α и разности частот dω определяются средние за интервал времени n·dt значения ближайшего угла α и разности частот dω между двумя вращающимися полями U1(ti), U2(ti):
где n - целое значение.
Исходными значениями для предлагаемого способа точной синхронизации двух трехфазных электроэнергетических систем являются заданное значение максимальной разности частот dωmax, заданное значение максимальной разности амплитуд dUmax и заданное значение времени включения выключателя Твкл.
При выполнении обоих условий dω≤dωmax и dU≤dUmax подают команду включения выключателя, который соединяет две трехфазные электроэнергетические системы, в момент смены знака выражения (α-αmax) с положительного на отрицательный, где αmax=dω·Твкл.
Использование всех трех фаз напряжения (Ua, Ub, Uc) двух электроэнергетических систем (вместо использования одной фазы напряжения) приводит к значительному улучшению параметров синхронизации двух трехфазных электроэнергетических систем:
1. Большее число сигналов (напряжения трех фаз) приводит к увеличению точности определения момента включения выключателя.
2. Использование вращающихся полей U1(ti), U2(ti), создаваемых тремя фазами Ua1(ti), Ub1(ti), Uc1(ti) и Ua2(ti), Ub2(ti), Uc2(ti) промышленного трехфазного напряжения, позволяет учитывать разность фаз между всеми тремя парами фаз напряжений (Ua1 и Ua2, Ub1 и Ub2, Uc1 и Uc2), в результате включение выключателя происходит с наименьшим суммарным по всем трем фазам толчком тока.
3. Автоматически контролируется идентичность чередования фаз двух электроэнергетических систем, поскольку при разном чередовании фаз одна фаза двух систем может быть синхронизована (и может быть неправильное включение при использовании только одной фазы), но вращающиеся поля U1(ti), U2(ti) будут вращаться в разных направлениях, и синхронизация никогда не наступит.
Таким образом, предлагаемый способ синхронизации двух трехфазных электроэнергетических систем позволяет увеличить точность определения момента включения выключателя, который соединяет две трехфазные электроэнергетические системы, включать выключатель с наименьшим суммарным по всем трем фазам толчком тока, автоматически контролировать идентичность чередования фаз двух электроэнергетических систем.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ КОРОТКИХ ЗАМЫКАНИЙ | 2013 |
|
RU2535297C1 |
| Способ синхронизации трехфазных инверторов напряжения | 2024 |
|
RU2835153C1 |
| Способ определения начальной стадии пробоя изоляции и контроля его развития действующей трехфазной электрической сети с изолированной нейтралью | 2020 |
|
RU2768524C2 |
| Тиристорное вольтодобавочное устройство продольного регулирования напряжения | 2023 |
|
RU2813363C1 |
| ЗАЩИТНОЕ УСТРОЙСТВО ВНЕШНЕГО ТЕРМИНАЛА И СИСТЕМА ЗАЩИТЫ | 2019 |
|
RU2764292C1 |
| СПОСОБ УПРАВЛЕНИЯ ПЕРЕМЕЩЕНИЕМ ДАННЫХ НА ОСНОВЕ ЛОГИЧЕСКОГО УЗЛА АППАРАТНОГО УПРАВЛЕНИЯ И СИСТЕМА ДЛЯ ОСУЩЕСТВЛЕНИЯ СПОСОБА | 2019 |
|
RU2822994C2 |
| СПОСОБ ОПРЕДЕЛЕНИЯ МЕСТА КОРОТКОГО ЗАМЫКАНИЯ НА ВОЗДУШНОЙ ЛИНИИ ЭЛЕКТРОПЕРЕДАЧИ ПО МАССИВАМ МГНОВЕННЫХ ЗНАЧЕНИЙ ТОКОВ И НАПРЯЖЕНИЙ | 2012 |
|
RU2504792C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ СКОРОСТИ ТРЕХФАЗНОГО ДВИГАТЕЛЯ ПЕРЕМЕННОГО ТОКА | 1999 |
|
RU2150781C1 |
| УСТРОЙСТВО ДЛЯ ЗАЩИТЫ ЭЛЕКТРОДВИГАТЕЛЕЙ ОТ КОРОТКИХ ЗАМЫКАНИЙ | 2014 |
|
RU2553665C1 |
| СПОСОБ ОБНАРУЖЕНИЯ РАДИОЭЛЕКТРОННЫХ СРЕДСТВ | 2012 |
|
RU2497285C1 |
Использование: в области электроэнергетики. Технический результат - повышение точности определения момента включения выключателя и автоматический контроль идентичности чередования фаз двух электроэнергетических систем. Процесс точной синхронизации двух трехфазных электроэнергетических систем производится в цифровом виде, используя выходные цифровые сигналы АЦП всех трех фаз промышленного трехфазного напряжения первой Ua1(ti), Ub1(ti), Uc1(ti) и второй Ua2(ti), Ub2(ti), Uc2(ti) электроэнергетических систем, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=t(i+1)-ti, причем величина dt значительно меньше периода Τ промышленного трехфазного напряжения, dt≤≤T. Использование всех трех фаз напряжения (Ua, Ub, Uc) двух электроэнергетических систем (вместо использования одной фазы напряжения) приводит к значительному улучшению параметров синхронизации двух трехфазных электроэнергетических систем. Большее число сигналов (напряжения трех фаз) приводит к увеличению точности определения момента включения выключателя. Использование вращающихся полей U1(ti), U2(ti), создаваемых тремя фазами Ua1(ti), Ub1(ti), Uc1(ti) и Ua2(ti), Ub2(ti), Uc2(ti) промышленного трехфазного напряжения, позволяет учитывать разность фаз между всеми тремя парами фаз напряжений (Ua1 и Ua2, Ub1 и Ub2, Uc1 и Uc2), в результате включение выключателя происходит с наименьшим суммарным по всем трем фазам толчком тока. 3 ил.
Способ синхронизации двух трехфазных электроэнергетических систем, в котором измеряют разность фаз между двумя трехфазными электроэнергетическими системами, для определения момента подачи команды включения выключателя, который соединяет две трехфазные электроэнергетические системы при разности частот двух систем меньше, чем заданное значение максимальной разности частот dωmax, и при разности амплитуд напряжений двух систем меньше, чем заданное значение максимальной разности амплитуд dUmax, и заданном значении времени включения выключателя Твкл используют цифровые сигналы всех трех фаз промышленного трехфазного напряжения первой Ua1(ti), Ub1(ti), Uc1(ti) и второй Ua2(ti), Ub2(ti), Uc2(ti) электроэнергетических систем, измеренные в моменты времени ti, где i - целое значение, оцифрованные с периодом дискретизации dt=t(i+1)-ti, причем величина dt значительно меньше периода Τ промышленного трехфазного напряжения, dt<<T, исходя из цифровых сигналов всех трех фаз промышленного трехфазного напряжения двух систем определяют амплитуды напряжения первой Ua1, Ub1, Uc1 и второй Ua2, Ub2, Uc2 электроэнергетических систем, отличающийся тем, что определяют проекции Ux1(ti), Ux2(ti) на ось абсцисс X вращающихся полей U1(ti), U2(ti), создаваемых тремя фазами Ua1(ti), Ub1(ti), Uc1(ti) и Ua2(ti), Ub2(ti), Uc2(ti) промышленного трехфазного напряжения:

определяют проекции Uy1(ti), Uy2(ti) на ось абсцисс Υ вращающихся полей U1(ti), U2(ti):
Uy1(ti)=(2·Ua1(ti)-Ub1(ti)-Uc1(ti))/2, Uy2(ti)=(2·Ua2(ti)-Ub2(ti)-Uc2(ti))/2,
определяют модули вращающихся полей U1(ti), U2(ti):

определяют фазы φi1, φi2 вращающихся полей U1(ti), U2(ti):
φi1=k1·2π+k2·arccos{Ux1(ti)/U1(ti)}, φi2=k3·2π+k4·arccos{Ux2(ti)/U2(ti)},
где k1=0, k2=1 если Uy1(ti)≥0, иначе k1=1, k2=-1,
k3=0, k4=1 если Uy2(ti)≥0, иначе k3=1, k4=-1,
определяют модуль угла φi между двумя вращающимися полями U1(ti), U2(ti):
|φi|=|φi1-φi2|,
определяют ближайший угол αi между двумя вращающимися полями U1(ti), U2(ti):
αi=|φi|, если |φi|≤π, иначе αi=2π-|φi|,
определяют разность dωi частот вращения вращающихся полей U1(ti), U2(ti):
dωi=|[α(i+1)-αi]/dt|
определяют разности dUa, dUb, dUc амплитуд всех трех фаз двух систем:
dUa=|Ua1-Ua2|, dUb=|Ub1-Ub2|, dUc=|Uc1-Uc2|,
определяют максимальное значение dU разности амплитуд среди всех трех фаз двух систем:
dU = максимальное значение из (dUa, dUb, dUc),
определяют средние за интервал времени n dt значения ближайшего угла α и разности частот dω между двумя вращающимися полями U1(ti), U2(ti):
 где n - целое значение,
где n - целое значение,
и при выполнении обоих условий dω≤dωmax и dU≤dUmax подают команду включения выключателя, который соединяет две трехфазные электроэнергетические системы, в момент смены знака выражения (α-αmax) с положительного на отрицательный, где αmax=dω·Tвкл.
| СПОСОБ СИНХРОНИЗАЦИИ ВОЗБУЖДЕННОЙ СИНХРОННОЙ МАШИНЫ С СЕТЬЮ (ВАРИАНТЫ) | 2000 |
|
RU2190917C2 |
| СПОСОБ СИНХРОНИЗАЦИИ И ПОДКЛЮЧЕНИЯ В РЕЖИМ ПАРАЛЛЕЛЬНОЙ РАБОТЫ РЕГУЛИРУЕМОГО СТАТИЧЕСКОГО ИСТОЧНИКА ПЕРЕМЕННОГО НАПРЯЖЕНИЯ И ИСТОЧНИКА ПЕРЕМЕННОГО НАПРЯЖЕНИЯ | 2008 |
|
RU2381607C1 |
| СПОСОБ СИНХРОНИЗАЦИИ АВТОНОМНОГО ИНВЕРТОРА НАПРЯЖЕНИЯ С ТРЕХФАЗНЫМ ИСТОЧНИКОМ НАПРЯЖЕНИЯ | 2010 |
|
RU2416856C1 |
| JP 59185166A, 20.10.1984 | |||

