Предлагаемое изобретение относится к области морской геофизической разведки и может быть использовано при проведении исследовательских и сейсморазведочных работ на морских акваториях, покрытых сплошными паковыми льдами или водах, имеющих препятствия (загрязнения) техногенного происхождения, в частности для поиска полезных ископаемых на шельфе морей арктического региона.
На сегодняшний день подавляющее большинство известных способов и устройств для морской сейсмоакустической разведки полезных ископаемых включает в себя буксировку судном сейсмоакустических кос и источников, исполненных в виде импульсных источников ударного типа (пневмопушек или искровых разрядников - спаркеров), выпускаемых с кормы судна. Известны способы, предполагающие заглубление сейсмокос ниже уровня нижней границы льда с помощью специализированных технических устройств, например скегов (пат. RU 2487374, МПК G01V 1/38 (2006/01), опубл. 10.07.2013) или стационарных трубных каналов (пат. RU 2483331, МПК G01V 1/38 (2006/01), опубл. 27.05.2013). Данные способы выбраны в качестве прототипов.
В указанных способах исследовательское судно (ледокол) буксирует за кормой систему сейсмокос и пневмоакустический источник или их батарею, которые удерживаются на определенной глубине. При этом, посредством специальных устройств, сейсмокосы заглубляются ниже уровня нижней границы ледяного покрова, а поплавок источника, благодаря обтекателям и дополнительной армированной защите, допускает периодические столкновения с ледяными осколками. Применяемые технологии в обоих случаях подразумевают необходимость значительного удаления источника от судна для минимизации воздействия звукового излучения на судно и его экипаж. Необходимость использования длинных (порядка нескольких километров) сейсмокос вызывает необходимость точной координатной привязки контрольных точек косы с использованием глобальной системы позиционирования. Необходимость регистрации координат кос в системе глобального позиционирования делает обязательным условие свободной ото льда воды, что влечет за собой необходимость предварительной расчистки акватории вспомогательными судами сопровождения. В ледовой обстановке осколки льда сомкнутся за ледоколом уже на небольшом удалении от судна, что рано или поздно приведет к обрыву буксируемых устройств. В сложной ледовой обстановке выполнение всех условий практически неосуществимо, а периодические касания и удары льда затрудняют работу источников звука и вызывают повреждения приемных кос. По высказанным выше соображениям возникают обоснованные сомнения в эффективности защитных устройств, предназначенных для отвода льда, и методик осуществления сейсморазведки. Кроме прочего, пневмоисточники, используемые в сейсморазведке, не обладают свойством когерентности излучения и имеют всенаправленное излучение даже при использовании батареи источников. В условиях ледового покрова значительно возрастает реверберация звука, что приводит к ухудшению качества сейсмоакустического сигнала.
Известны альтернативные подходы, рассматривающие подводный носитель сейсмоакустического оборудования, который обеспечивает круглогодичную работу вне зависимости от ледового покрова, например патент RU 2485554, МПК G01V 1/38 (2006/01), опубл. 20.06.2013 или патент RU 2457515, МПК G01V 1/38 (2006/01), опубл. 27.07.2012. Подводная станция имеет ряд преимуществ, связанных с оптимизацией глубины буксировки излучателя звука и приемной системы, возможностью постановки донных приемных систем. Помимо сейсмических исследований, подводная станция обладает неоспоримыми преимуществами по контактному изучению характеристик грунта, возможностям контроля трубопроводов, кабельных линий и фундаментов бурильных платформ. В то же время к подводному носителю относительно надводного судна ужесточаются требования по надежности оборудования, простоте технологии развертывания буксируемых систем, дублированию различных систем и безаварийности функционирования в целом. Стесненность пространств, выделенных для размещения оборудования, и затрудненность обслуживания и наладки технических средств также являются осложняющими факторами при разработке. Установка сейсмического оборудования на подводную лодку не может происходить без существенной модернизации корабля, оборудования и методов его использования. Сложно обслуживать подводный корабль в условиях Арктики, и он в любом случае потребует надводное обеспечение. Кроме того, применение подводного корабля для сейсморазведки имеет ограничения по глубине акваторий, которые подводная станция сможет обслуживать. При этом в первую очередь выпадают прибрежные мелководные районы, наиболее удобные с точки зрения первоначального освоения шельфа и добычи.
Задачей, на решение которой направлено настоящее изобретение, является разработка более технологичного способа, обеспечивающего надежное, безопасное для экипажа и технических средств, причиняющего меньший урон окружающей среде, сейсмоакустического зондирования морского дна и геологической разведки полезных ископаемых на шельфе в прибрежных районах и на глубокой воде при повышении экономической эффективности данных работ.
Заявленный способ реализуется с помощью комплекса сейсмоакустической аппаратуры, предназначенной для работы в условиях морских акваторий, покрытых паковыми льдами или загрязненных иными препятствиями техногенного происхождения.
Комплекс включает в себя судно-носитель ледокольного класса, аппаратный комплекс для излучения зондирующих импульсов, аппаратный комплекс для регистрации отраженных волн, аппаратный и программный комплекс для первичной обработки и архивации полученных данных и комплекс аппаратуры, предназначенный для выпуска сейсмоакустической аппаратуры в забортное пространство ниже нижней границы льда и выбора ее обратно на судно-носитель.
На чертежах, поясняющих изобретение, представлены:
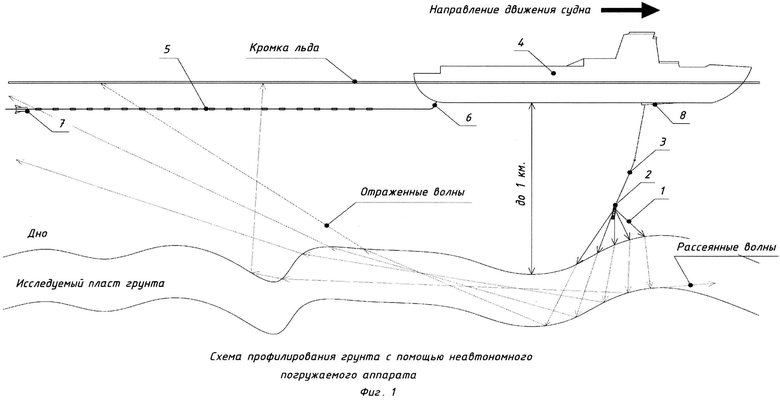
- на фиг. 1 - схема профилирования грунта с помощью неавтономного погружаемого аппарата, где поз. 1 - направленное в дно излучение звука, поз. 2 - неавтономный подводный аппарат, несущий излучатели, поз. 3 - несущий трос, поз. 4 - судно-носитель, поз. 5 - сейсмоакустическая коса, поз. 6 - телескопически раскладывающийся трубный канал, имеющий электрический привод и позволяющий регулировать глубину погружения косы, поз. 7 - неавтономный подводный аппарат для регулирования пространственного положения косы, поз. 8 - корпусная конструкция обвода ледяных осколков;
- на фиг. 2 - схема профилирования грунта с помощью разборной фермы, где поз. 1 -направленное в дно излучение звука, поз. 4 - судно-носитель, поз. 5 - сейсмоакустическая коса, поз. 6 - телескопически раскладывающийся трубный канал, имеющий электрический привод и позволяющий регулировать глубину погружения косы, поз. 7 - неавтономный подводный аппарат для регулирования пространственного положения косы, поз. 8 - корпусная конструкция обвода ледяных осколков, поз. 9 - выдвигаемая из шахты в днище судна-носителя разборная ферма, поз. 10 - тросы (3 шт.) для фиксации фермы;
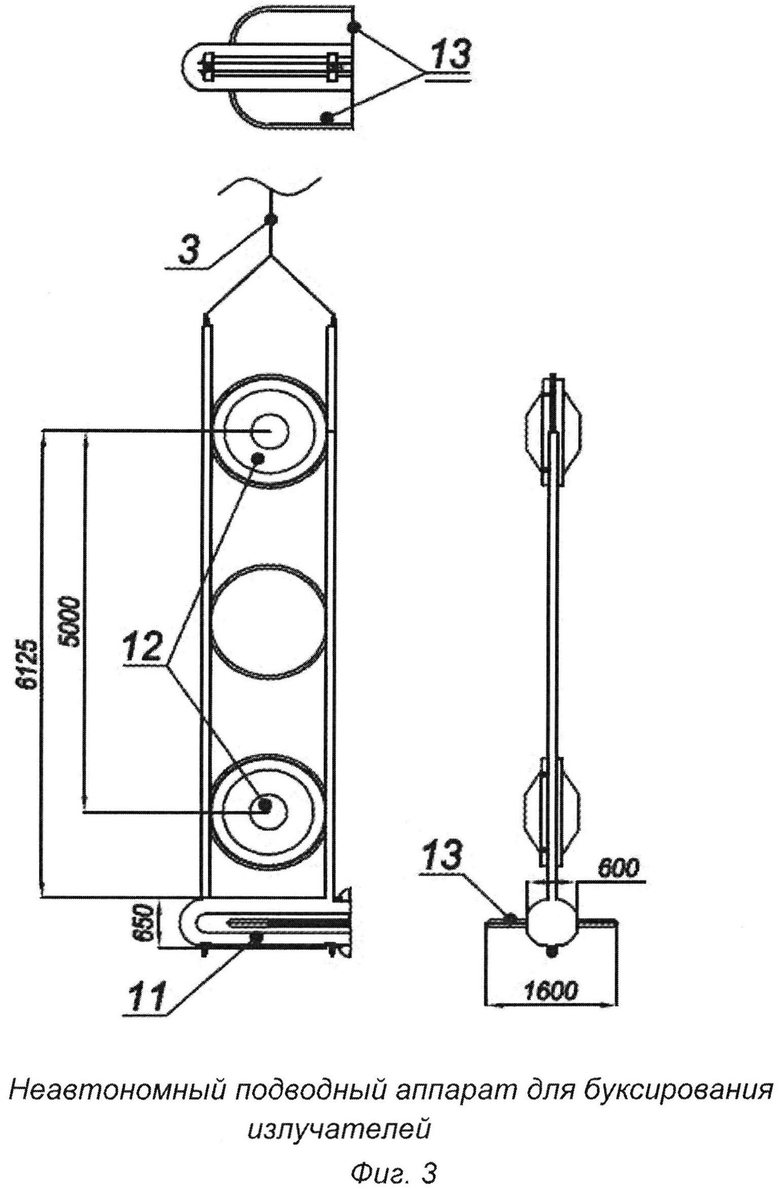
- на фиг. 3 - неавтономный подводный аппарат для буксирования излучателей, где поз. 3 - несущий трос, поз. 11 - подводный аппарат с собственным двигателем, поз. 12 - излучатели, поз. 13 - стабилизаторы положения аппарата;
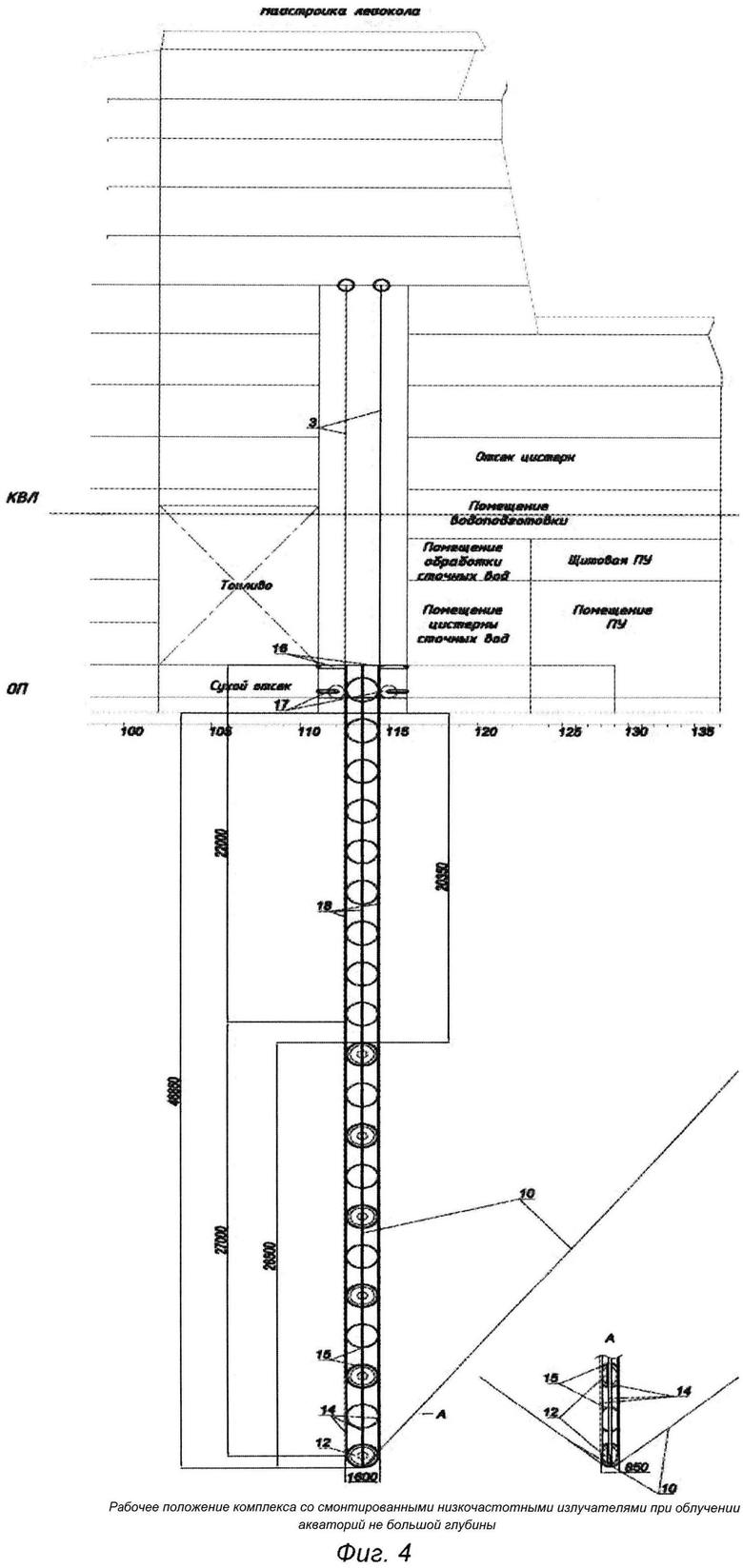
- на фиг. 4 - рабочее положение комплекса со смонтированными низкочастотными излучателями при облучении акваторий небольшой глубины, где поз. 1 - излучатели, поз. 3 - несущие тросы, поз. 10 - тросы (3 шт.) для фиксации фермы, поз. 14 - разборный каркас из П-образных металлических балок, несущих смонтированные излучатели, поз. 15 - рамные конструкции для жесткой фиксации балок и монтажа излучателей, поз. 16 - опорные балки, поз. 17 - откидные барабаны, предназначенные для жесткой фиксации несущей фермы в районе донного люка и фиксации глубины погружения излучателей, поз. 18 - несущие П-образные балки, к которым крепится каркас поз. 14;
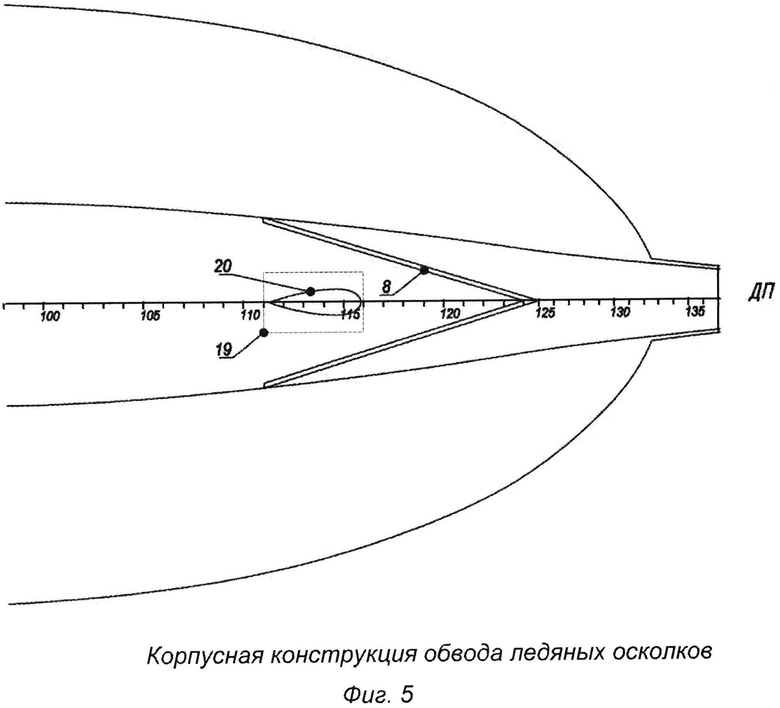
- на фиг. 5 - корпусная конструкция обвода ледяных осколков, где поз. 8 - корпусная конструкция обвода ледяных осколков, поз. 19 - шахта, в которой установлен комплекс аппаратуры для погружения излучателей, поз. 20 - донный вырез (люк);
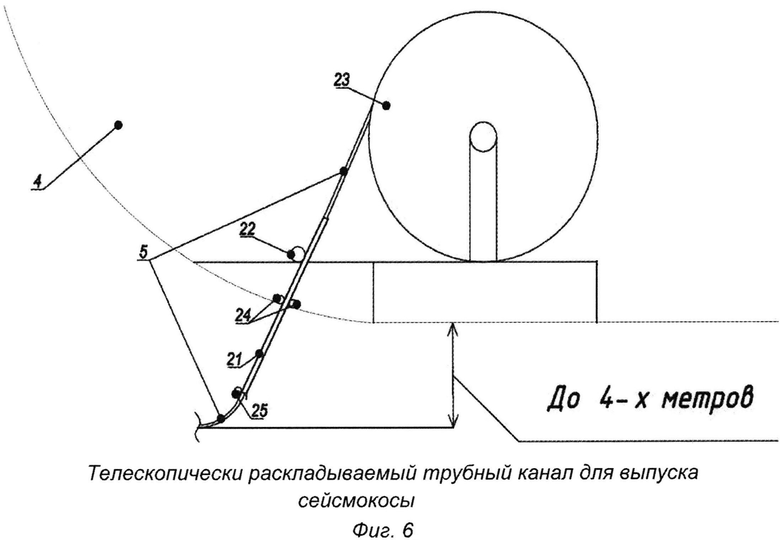
- на фиг. 6 - телескопически раскладываемый трубный канал для выпуска сейсмокосы, где поз. 4 - судно-носитель, поз. 5 - сейсмокоса, поз. 21 - труба канала, поз. 22 - электрический привод трубы канала, поз. 23 - барабан для намотки сейсмокосы, поз. 24 - направляющие колеса трубы канала, поз. 25 - направляющее колесо сейсмокосы;
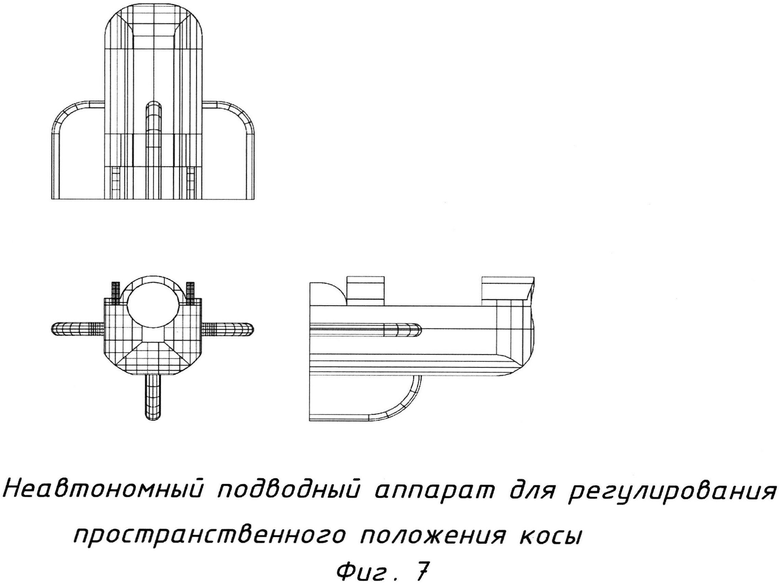
- на фиг. 7 - неавтономный подводный аппарат для регулирования пространственной ориентации участка косы.
Разработанный способ реализуется следующим образом:
- морское дно облучают при помощи гидроакустического излучателя или системы излучателей, формирующих направленное в дно излучение звука (фиг. 1 поз. 1, или фиг. 2 поз. 1), установленного на неавтономном подводном аппарате (фиг. 1 поз. 2) (вариант 1 способа), выпускаемом с помощью несущего троса (фиг. 1 поз. 3) из шахты в днище судна-носителя (фиг. 1 или фиг. 2 поз. 4), или установленного на выдвигаемой из шахты в днище судна-носителя разборной ферме (фиг. 2 поз. 9), жестко закрепленной на днище (вариант 2). Основание шахты защищено от возможного контакта с обломками льда, затягиваемыми под судно, с помощью специально предусмотренной корпусной конструкции - обвода (фиг. 1, или фиг. 2, или фиг. 5 поз. 8). В случае применения разборной фермы, для придания конструкции дополнительной жесткости и предварительного напряжения, нижний конец фермы дополнительно фиксируется тросами (фиг. 2 или фиг. 4 поз. 10), оттягивающими конец фермы к носу и бортам судна. Излучатель выполнен в виде, по крайней мере, одного источника когерентного широкополосного низкочастотного акустического излучения мощностью порядка 1 кВт и более, который в состоянии излучать сигналы со сложным спектром и работать с сохранением выбранных фазовых соотношений с другими источниками излучающей системы, используемой для облучения. Прием и регистрацию отраженного излучения осуществляют посредством сейсмоакустических кос (фиг. 1 или фиг. 2 поз. 5), выпускаемых из днища или кормовой части судна ниже нижней границы ледового покрытия. Сейсмоакустические косы имеют нейтральную плавучесть, выпускаются в забортное пространство с помощью телескопически раскладывающегося трубного канала (фиг. 1 или фиг. 2 поз. 6), имеющего электрический привод и позволяющего регулировать глубину погружения косы. Горизонтальная и вертикальная ориентация приемной косы в толще воды регулируется с помощью неавтономных подводных аппаратов (фиг. 1 или фиг. 2 поз. 7), жестко сцепленных с косой и имеющих стабилизаторы положения с отклоняемыми закрылками, позволяющими регулировать глубину погружения участка косы и его горизонтальную ориентацию. Обработку принятых сигналов проводят с привлечением корреляционных методов, предполагающих сжатие сигнала со сложным спектром;
- при исследовании пластов с большой (до десяти километров) глубиной залегания для излучения зондирующих импульсов при облучении дна акваторий большой (до 1 км) глубины применен источник, исполненный в виде набора из нескольких излучателей (фиг. 3 поз. 12) когерентного широкополосного низкочастотного (60-120 Гц) акустического излучения с линейно частотной модуляцией или модуляцией псевдослучайной последовательностью и диаграммой направленности для облучения дна в надир. Данный источник стационарно установлен на подводном аппарате (фиг. 3 поз. 11), оборудованный собственным двигателем и складывающимися стабилизаторами положения (фиг. 3 поз 13), который погружают на необходимую глубину с помощью троса (фиг. 3 поз. 3).
- при исследовании пластов с большой (до десяти километров) глубиной залегания для излучения зондирующих импульсов при облучении дна акваторий небольшой (от 50 до 100 м.) глубины применен источник, исполненный в виде набора из нескольких излучателей (фиг. 4 поз. 12) когерентного широкополосного акустического излучения (в диапазоне частот 60-120 Гц) с линейно частотной модуляцией или модуляцией псевдослучайной последовательностью и диаграммой направленности для облучения дна в надир. Данный источник жестко установлен на выпускаемой из днища судна-носителя разборной ферме (фиг. 4 поз. 14), и погружается на минимально необходимую глубину для обеспечения санитарных требований по уровню шума на судне-носителе. Основание фермы защищено от возможного соприкосновения с осколками льда специальной корпусной конструкцией (Фиг.5). Выпуск фермы осуществляется посредством системы, состоящей из тросов лебедок (фиг. 4 поз. 3), рамных конструкций (фиг. 4 поз. 15) и вращающихся барабанов (фиг. 4 поз. 17), установленных на днище судна с внутренней стороны, посредством зубчатой передачи регулирующих выпуск несущих балок фермы (фиг. 4 поз. 18). Данные барабаны оборудованы стопорным устройством, позволяющим жестко фиксировать глубину погружения излучателей. Для придания конструкции дополнительной жесткости и создания предварительного напряжения конструкции конец погружаемой фермы дополнительно фиксируется посредством трех тросов (фиг. 4 поз. 10), оттягивающих ферму к носу и бортам судна носителя, а основание упирается в специальные упоры (фиг. 4 поз. 16), жестко закрепленные на корпусе судна;
- при исследовании пластов с небольшой (до нескольких сотен метров) глубиной залегания для излучения зондирующих импульсов при облучении дна акваторий большой (до 1 км) глубины применен источник, исполненный в виде набора из нескольких излучателей когерентного широкополосного акустического излучения (диапазон частот 250-350 Гц) с линейно частотной модуляцией или модуляцией псевдослучайной последовательностью и диаграммой направленности для облучения дна в надир. Данный источник жестко установлен на неавтономном подводном аппарате, который погружается на необходимую глубину с помощью троса и оборудован собственным двигателем и складывающимися стабилизаторами положения;
- при исследовании пластов с небольшой (до нескольких сотен метров) глубиной залегания для излучения зондирующих импульсов при облучении дна акваторий небольшой (от 50 до 100 м) глубины применен источник, исполненный в виде набора из нескольких излучателей когерентного широкополосного акустического излучения (в диапазоне частот 250-350 Гц) с линейно частотной модуляцией или псевдослучайной последовательностью и сформированной диаграммой направленности для облучения дна в надир. Данный источник так же жестко установлен на выпускаемой из днища судна-носителя разборной ферме (фиг. 4 поз. 14), и погружается на минимально необходимую глубину для обеспечения санитарных требований по уровню шума на судне-носителе. Основание фермы защищено от возможного соприкосновения с осколками льда специальной корпусной конструкцией (Фиг.5). Выпуск фермы осуществляется посредством системы, состоящей из тросов лебедок (фиг. 4 поз. 3), рамных конструкций (фиг. 4 поз. 15) и вращающихся барабанов (фиг. 4 поз. 17), установленных на днище судна с внутренней стороны и, посредством зубчатой передачи, регулирующих выпуск несущих балок фермы (фиг. 4 поз. 18). Данные барабаны оборудованы стопорным устройством, позволяющим жестко фиксировать глубину погружения излучателей. Для придания конструкции дополнительной жесткости и создания предварительного напряжения конструкции конец погружаемой фермы дополнительно фиксируется посредством трех тросов (фиг. 4 поз 10), оттягивающих ферму к носу и бортам судна носителя, а основание упирается в специальные упоры (фиг. 4 поз. 16), жестко закрепленные на корпусе судна;
- примененные в качестве источников излучатели когерентного широкополосного акустического излучения позволяют излучать сигналы сложной формы (например, линейно частотно модулированные сигналы), что позволяет осуществлять когерентное накопление сигналов при продолжительном излучении. Результатом когерентного накопления сигналов является, по крайней мере, стократный выигрыш в энергии по сравнению с методами, использующими в качестве источников пневмопушки (данный выигрыш следует из соотношения длительности когерентного излучения сложного сигнала в разработанном способе и длительности излучения пневмопушки). Подобный выигрыш позволяет осуществлять сейсмозондирование в гораздо более щадящем режиме, нежели с применением сейсмопушек. Кроме того, когерентность излучения позволяет организовать направленное излучение в направлении надира и направленный прием сигналов, отраженных преимущественно дном акватории, с подавлением сигналов, отраженных от покрытой льдом поверхности, а значит, значительно повысить соотношение сигнал/шум. Данный прием позволяет значительно снизить экологическую нагрузку на исследуемую акваторию.
Для регистрации отраженных волн используется сейсмокоса, длиной около 500 метров, в результате чего отпадает необходимость точной регистрации (координатной привязки) контрольных точек косы в системе глобального позиционирования, значительно снижается риск повреждения косы об лед. Для выпуска сейсмокосы в забортное пространство применен телескопически раскладывающийся трубный канал, непосредственно через трубу канала (фиг. 6 поз. 21) которого посредством электрического привода (фиг. 6 поз. 22) и направляющих колес (фиг. 6 поз. 24) производят регулирование положения (фиг. 6 поз. 25) и глубины выпускания косы, которая сматывается/наматывается на барабан (фиг. 6 поз. 23). Расположен данный канал в кормовой части днища судна-носителя. Для регулирования горизонтального и вертикального положения косы в толще воды применены неавтономные подводные аппараты ("птички") (фиг. 7), жестко сцепленные с косой и имеющие стабилизаторы положения с отклоняемыми закрылками. Для первичной обработки записанного материала используются общие принципы когерентной обработки сигналов, позволяющие применять стандартное оборудование и предоставлять материалы в стандартных форматах, используемых при сейсмоакустической разведке донных слоев. Специализированное программное обеспечение, используемое в предлагаемом способе, организовывает корреляционную обработку сигналов, стандартную для смежных научных дисциплин (см., например, Скучик Е. Основы акустики. М.: Мир, 1976, T. 1), но не применяющихся в традиционных методах сейсмоакустической разведки.
В итоге преимущества сводятся к следующим:
обработка сложных сигналов позволяет значительно повысить разрешающую способность метода;
- специально предусмотренные рамные конструкции, предназначенные для монтажа излучателей, позволяют осуществлять данный монтаж на одних и тех же несущих фермах, что позволяет унифицировать аппаратуру и значительно снижает стоимость ее эксплуатации;
- уменьшается вредное воздействие зондирующих волн на окружающую среду за счет использования излучающей системы с диаграммой направленности зондирующей дно в надир;
- улучшается качество принятых сигналов за счет устранения мешающей реверберации (поверхностной и объемной), которая уменьшается при направленном зондирующем сигнале.
Таким образом, предлагаемый способ позволяет достигнуть заявленного технического результата, а также решать поставленные задачи сейсморазведки акваторий, покрытых сплошным покровом пакового льда, более эффективно, но не отказываясь от накопленного ранее опыта, технического обеспечения вычислительных центров и служб, разработанных прикладных программ и т.п.
| название | год | авторы | номер документа |
|---|---|---|---|
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2595048C1 |
| НАУЧНО-ИССЛЕДОВАТЕЛЬСКОЕ ЛЕДОКОЛЬНОЕ СУДНО ДЛЯ СЕЙСМОРАЗВЕДКИ ПО 3D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ | 2013 |
|
RU2549303C2 |
| СЕЙСМОГРАФИЧЕСКОЕ СУДНО ДЛЯ ПРОВЕДЕНИЯ СЕЙСМОРАЗВЕДКИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2015 |
|
RU2589242C1 |
| СЕЙСМОГРАФИЧЕСКОЕ СУДНО ДЛЯ СЕЙСМОРАЗВЕДКИ ПО 2D ТЕХНОЛОГИИ В АРКТИЧЕСКИХ МОРЯХ ВНЕ ЗАВИСИМОСТИ ОТ ЛЕДОВЫХ УСЛОВИЙ | 2013 |
|
RU2539430C2 |
| СПОСОБ ПОДВОДНОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621638C1 |
| СПОСОБ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ НА АКВАТОРИЯХ, ПОКРЫТЫХ ЛЬДОМ | 2009 |
|
RU2436129C2 |
| Способ проведения подводно-подледного сейсмопрофилирования с использованием перемещаемой подводным судном донной сейсморазведочной косы и технологический комплекс для его осуществления | 2014 |
|
RU2663308C2 |
| СПОСОБ ПРОВЕДЕНИЯ 3D ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2011 |
|
RU2485554C1 |
| Комплекс сейсморазведки | 2020 |
|
RU2734492C1 |
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2010 |
|
RU2457515C2 |
Изобретение относится к области морской геофизической разведки и может быть использовано для поиска полезных ископаемых на шельфе морей арктического региона. Согласно заявленному предложению морское дно облучают при помощи гидроакустического излучателя или системы излучателей, формирующих направленное в дно излучение звука (1), установленного на неавтономном подводном аппарате, выпускаемом с помощью несущего троса из шахты в днище судна-носителя (4), или установленного на выдвигаемой из шахты в днище судна-носителя разборной ферме (9). Основание шахты защищают от возможного контакта с обломками льда, затягиваемыми под судно, с помощью специально предусмотренной корпусной конструкции - обвода (8). Прием и регистрацию отраженного излучения осуществляют посредством сейсмоакустических кос (5), выпускаемых из днища или кормовой части судна ниже нижней границы ледового покрытия с помощью телескопически раскладывающегося трубного канала (6), имеющего электрический привод и позволяющего регулировать глубину погружения косы. Горизонтальную и вертикальную ориентацию приемной косы в толще воды регулируют с помощью неавтономных подводных аппаратов (7). Обработку принятых сигналов проводят с привлечением корреляционных методов. Технический результат - повышение качества и точности получаемых данных о структуре донных слоев. 5 з.п. ф-лы, 7 ил.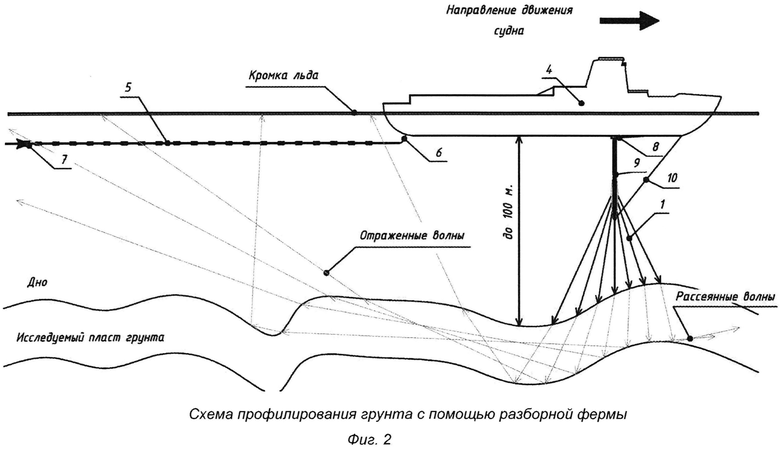
1. Способ проведения подводно-подледных сейсмоакустических разведочных работ с использованием судна-носителя ледокольного класса, перемещающего вблизи дна исследуемой морской акватории, по крайней мере, один излучатель акустического сигнала и буксирующего, по крайней мере, одну приемную сейсмокосу, отличающийся тем, что дно акватории облучают с помощью излучателя, выполненного в виде, по крайней мере, одного источника когерентного широкополосного низкочастотного акустического излучения мощностью порядка 1 кВт и более, при этом указанный источник устанавливают стационарно на подводном неавтономном аппарате, который выпускают посредством несущего троса из специально предусмотренной шахты в днище судна-носителя ниже нижней границы ледового покрова, или на специально предусмотренной разборной и выпускаемой из шахты в днище судна-носителя ферме, а прием и регистрацию отраженного излучения осушествляют с помощью, по крайней мере, одной сейсмокосы, которую выпускают с помощью телескопически раскладываемого трубного канала в днище судна-носителя и погружают ниже уровня нижней границы ледового покрова, принятые сигналы обрабатывают с привлечением корреляционных методов.
2. Способ по п. 1, отличающийся тем, что выпуск неавтономного подводного аппарата, несущего источник, и разборной фермы, несущей источник, осуществляют через шахту, основание которой защищают специальной корпусной конструкцией-обводом для исключения соприкосновения обломков льда, затягиваемых под судно-носитель, с тросом, несущим неавтономный подводный аппарат, с фермой, несущей источник.
3. Способ по п. 1, отличающийся тем, что отраженные волны регистрируют с помощью сейсмокосы, длиной около 500 метров.
4. Способ по п. 1, отличающийся тем, что дно исследуемой морской акватории облучают в надир с помощью системы источников, выполненной в виде набора из нескольких излучателей когерентного широкополосного низкочастотного акустического излучения (диапазон частот 60-120 Гц) со сложным сигналом и сформированной диаграммой направленности для облучения дна в надир.
5. Способ по п. 1, отличающийся тем, что дно исследуемой морской акватории облучают в надир с помощью источника, выполненного в виде набора из нескольких излучателей когерентного широкополосного акустического излучения (диапазон частот 250-350 Гц) со сложным сигналом и сформированной диаграммой направленности для облучения дна в надир.
6. Способ по п. 1, отличающийся тем, что применяемые источники когерентного широкополосного низкочастотного акустического излучения формируют диаграмму направленности системы излучателей, направляют излучение сигналов в исследуемые направления, осуществляют в дальнейшем когерентное накопление принятых сигналов для последующей обработки с привлечением корреляционных методов.
| СПОСОБ ПРОВЕДЕНИЯ ПОДВОДНО-ПОДЛЕДНОЙ ГЕОФИЗИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2010 |
|
RU2457515C2 |
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2006 |
|
RU2317572C1 |
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2011 |
|
RU2483331C1 |
| СПОСОБ ПРОВЕДЕНИЯ 3D ПОДВОДНО-ПОДЛЕДНОЙ СЕЙСМОАКУСТИЧЕСКОЙ РАЗВЕДКИ С ИСПОЛЬЗОВАНИЕМ ПОДВОДНОГО СУДНА | 2011 |
|
RU2485554C1 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2010 |
|
RU2487374C2 |
| US 5113376 A , 12.05.1992 | |||

