ПЕРЕКРЕСТНАЯ ССЫЛКА НА РОДСТВЕННЫЕ ЗАЯВКИ
По этой заявке испрашивается приоритет предварительных заявок на патенты США: №61/158698, поданной 9 марта 2009 года под названием “Marine seismic surveying in icy waters; №61/246367, поданной 28 сентября 2009 года под названием “Floatation device for marine seismic surveying in icy waters”; и №61/261329, поданной 14 ноября 2009 года под названием “Marine seismic surveying in icy or obstructed waters”, каждая из которых полностью включена в эту заявку путем ссылки.
УРОВЕНЬ ТЕХНИКИ
При обычной морской сейсморазведке используют сейсмический источник и некоторое количество буксируемых кос, буксируемых позади сейсморазведочного судна. Эти буксируемые косы имеют датчики, которые обнаруживают сейсмическую энергию для построения изображений формаций под морским дном. Выпуск буксируемых кос и источников и буксировка их во время разведки могут быть относительно несложными в случае выполнения работы в открытых водах при умеренных волнах или в аналогичных ситуациях.
В морских районах, покрытых льдом, мусором, при наличии крупных волн или других препятствий разведка может стать более трудной, дорогой или даже невозможной. Например, в покрытых льдом водах сейсморазведочное судно должно прокладывать дорогу во льду и лавировать в водах, заполненных обломками ледяного поля. Шум, создаваемый ударами льда, может усложнять получаемую сейсмическую запись.
В дополнение к этому обломки ледяного поля на поверхности воды делают буксировку источника и буксируемых кос более трудной и предрасполагают к повреждениям. Например, любые компоненты системы на поверхности воды могут наталкиваться на лед, затягиваться и теряться. Кроме того, на поверхности любых кабелей или буксирных тросов, выпускаемых с судна, даже со слипов, может нарастать лед. Более того, лед, затягиваемый под корпус и всплывающий позади судна, может сдвигать эти кабели и тросы.
Некоторые способы выполнения сейсморазведок в покрытых льдом районах известны из уровня техники и раскрыты в патентах США №№5113376 и 5157636 (Bjerkoy). Однако до настоящего времени проблемы, связанные с морской сейсморазведкой в покрытых льдом или имеющих препятствия водах не разрешены в достаточной степени. Предмет настоящего раскрытия направлен на исключение или по меньшей мере ослабление отрицательных последствий одной или нескольких проблем, изложенных выше.
КРАТКОЕ ИЗЛОЖЕНИЕ
Морская сейсморазведочная установка имеет скег, который установлен на судне, и предпочтительно, на задней части или корме судна. Дистальный конец скега продолжается ниже ватерлинии судна и даже может продолжаться на несколько метров ниже киля судна. Сейсморазведочная система выпускается с судна и имеет некоторое количество кабелей для буксируемых кос и кабелей для сейсмического источника, такого как группа воздушных пушек. Чтобы защитить эти кабели, каналом в кромке позади скега производятся удержание и направление этих кабелей ниже ватерлинии судна. Таким образом, поверхностный лед не может сталкиваться с кабелями при буксировке сейсморазведочной системы.
Дистальный конец скега имеет буксировочные точки, которые могут быть расположены на основании. Буксирные тросы для буксируемых кос и источника системы соединены с этими буксировочными точками. Таким образом, эти буксирные тросы выпускаются под воду и на расстояние от любых обломков ледяного поля, которые могут присутствовать на поверхности воды.
В буксируемой разведочной системе позади судна плавучее устройство может поддерживать горизонтально расположенный источник. Для исключения столкновений с обломками ледяного поля предпочтительно, чтобы это устройство плавало ниже поверхности воды. Как вариант можно использовать вертикальный источник, выпускаемый со скега. При приведении в действие этого вертикального источника возбуждение элементов или пушек источника может синхронизироваться с учетом любого наклона, который может иметь вертикальный источник. Этим синхронизированным возбуждением может поддерживаться качество источников и сохраняться обращенная вниз характеристика создаваемого сейсмического сигнала источника.
Поскольку буксируемые косы буксируются ниже поверхности воды, буксируемые косы могут иметь выпускаемые устройства, включая стабилизаторы, крылья, параваны, глиссирующие буи, дистанционно управляемые аппараты, дистанционно управляемые буксируемые аппараты и автономные управляемые аппараты, которые могут осуществлять регулирование направления и положения. Например, управляемое выпускаемое устройство может быть буксируемым аппаратом, который может индивидуально регулировать поперечные и вертикальные положения буксируемых кос ниже поверхности воды. Кроме того, на концах буксируемых кос могут иметься конкретные управляемые аппараты с приемниками глобальной системы позиционирования (GPS-приемниками).
Для содействия определению местоположения буксируемых кос и датчиков при разведке, эти управляемые аппараты могут периодически приводиться к поверхности в случае отсутствия обломков ледяного поля или других препятствий, так что отсчеты глобальной системы позиционирования (GPS-отсчеты) могут быть получены и переданы на управляющую систему. После получения GPS-отсчетов управляемые аппараты можно переместить обратно ниже поверхности. Устройство инерциальной навигационной системы, встроенную навигационную систему или другую систему можно использовать в дополнение к GPS-отсчетам, чтобы местоположение буксируемых кос можно было определять даже в случае, когда крупные обломки ледяного поля на поверхности мешают управляемым аппаратам получать GPS-отсчеты.
При выполнении морской сейсморазведки ледокольное судно или само буксирующее судно может разрушать паковый лед перед буксируемыми косами и источником. В раскрытой системе события, связанные с ударами льда о корпус ледокольного судна, обнаруживаются и регистрируются при буксировке буксируемых кос и источника. В то же самое время генерируются сейсмические сигналы от источника, а датчики на буксируемых косах обнаруживают сейсмическую энергию, которая регистрируется как часть сейсмической записи при разведке. Затем с использованием информации о зарегистрированных, связанных с ударами событиях данные в сейсмической записи, являющейся результатом этих событий, могут быть отфильтрованы из сейсмической записи, что позволит операторам выполнять анализ сейсмических данных, которые относительно свободны от данных, основанных на событиях, связанных с ударами льда. Как вариант известная информация о связанных с ударами событиях может быть выделена из сейсмической записи и при анализе может моделироваться математически в качестве высококачественных источников сейсмических данных.
Приведенное выше краткое изложение не предполагается обобщающим каждое потенциальное осуществление или любой аспект настоящего раскрытия.
КРАТКОЕ ОПИСАНИЕ ЧЕРТЕЖЕЙ
На чертежах:
Фиг. 1А-1В - виды сбоку и в плане морской сейсморазведочной системы согласно определенным идеям настоящего раскрытия, предназначенной для использования в покрытых льдом районах;
Фиг. 2A-2D - перспективный, сзади, сбоку и сверху виды ледового скега на судне, предназначенном для буксировки группы сейсмических буксируемых кос и источника;
Фиг. 3А-3В - сечения ледового скега;
Фиг. 3С - вид сверху лопасти ледового скега;
Фиг. 4А-4С - перспективные виды выпущенных кабелей, буксирных тросов и компонентов морской сейсмической системы с использованием раскрытого ледового скега;
Фиг. 5 - вид сбоку другого ледового скега, частично вскрытого;
Фиг. 6А - кормовой вид судна, имеющего двухканальный ледовый скег согласно настоящему раскрытию;
Фиг. 6В - вид сбоку двухканального ледового скега с местным разрезом;
Фиг. 7А-7В - виды в плане лопастей для двухканального ледового скега;
Фиг. 8A-8D - виды плавучих систем согласно настоящему раскрытию для горизонтального источника, буксируемого позади судна со скегом;
Фиг. 9А-9В - виды буев для плавучих систем согласно настоящему раскрытию;
Фиг. 9C-9D - виды лопастей для раскрытой системы;
Фиг.9Е - перспективный вид управляемого стабилизатора для буксируемой косы;
Фиг. 9F - вид сбоку управляемого крыла для буксируемой косы;
Фиг. 10 - вид вертикального источника, расположенного ниже ледового скега;
Фиг. 11А-11С - виды компоновок вертикального источника с различными наклонами;
Фиг. 12A-12D - виды сбоку морских сейсморазведочных систем, имеющих плавучее устройство и управляемые устройства;
Фиг. 13А-13В - виды управляемого устройства одного типа в двух рабочих состояниях;
Фиг. 14 - иллюстрация осуществления управляемого устройства согласно настоящему раскрытию;
Фиг. 15 - вид внутренних деталей и компонентов устройства из фиг.14;
Фиг. 16А - вид первого тормоза для управляемого устройства;
Фиг. 16В-16С - виды второго тормоза для управляемого устройства в неразвернутом и развернутом состояниях;
Фиг. 17А-17С - виды третьего тормоза для управляемого устройства в неразвернутом, развернутом и выпущенном состояниях;
Фиг. 18А-18В - виды компоновок для возвращения погруженной буксируемой косы в случае, если буксировочное судно убавляет ход или останавливается;
Фиг. 19А - вид в плане сейсмического судна с ледовым скегом и зоной выпуска позади судна;
Фиг. 19В-19Е - виды сейсмического судна с выпущенными сейсмическими группами различных форм;
Фиг. 20А - вид сбоку морской сейсморазведочной системы, имеющей дистанционно управляемый буксируемый аппарат в качестве управляемого устройства на заднем конце буксируемой косы;
Фиг. 20В - вид в плане другой морской сейсморазведочной системы, имеющей дистанционно управляемые буксируемые аппараты в многочисленных местах на буксируемых косах;
Фиг. 21А-21В - более детальные виды дистанционно управляемого буксируемого аппарата;
Фиг. 22 - функциональная схема управляющей системы для управления дистанционно управляемыми буксируемыми аппаратами и определения местоположения их по счислению пути во время буксировки;
Фиг. 23 - схема контура управления для счисления пути и коррекции дрейфа в инерциальной навигационной системе;
Фиг. 24 - вид буксируемой косы с датчиками, расположенными на ней, предназначенными для определения формы буксируемой косы с использованием отсчета глобальной системы позиционирования для судна, известных местоположений датчиков, известного местоположения управляемого аппарата и различных компасных курсов;
Фиг. 25 - различные компоновки акустических систем, предназначенных для осуществления акустической поперечной связи, для определения положений буксируемых кос;
Фиг. 26 - вид, показывающий возможность получения короткой базовой линии с использованием преобразователя на судне и датчика на управляемом устройстве на заднем конце буксируемой косы для определений его положения;
Фиг. 27 - вид сбоку еще одной морской сейсморазведочной системы согласно определенным идеям настоящего раскрытия, в которой во время работы регистрируются связанные с ударами льда события;
Фиг. 28 - блок-схема последовательности действий способа, предназначенного для выполнения морской сейсморазведки в покрытом льдом районе при регистрации связанных с ударами льда событий;
Фиг. 29 - функциональная схема сейсмического регистратора для буксирующего судна;
Фиг. 30 - функциональная схема сейсмического регистратора для ледокольного судна;
Фиг. 31 - репрезентативная таблица данных, регистрируемых во время событий, связанных с разрушением льда;
Фиг. 32 - схема потока данных, регистрируемых морской сейсмической системой; и
Фиг. 33 - график, показывающий амплитудные характеристики зарегистрированных сейсмических данных морской сейсмической системы.
ПОДРОБНОЕ ОПИСАНИЕ
А. Морская сейсморазведочная система
Морскую сейсморазведочную систему 10А из фиг. 1А-1В можно использовать в покрытых льдом районах, имеющих глетчерный лед, паковый лед и обломки ледяного поля. Однако элементы системы 10А можно использовать в других местах, имеющих мусор, растения, выброшенные плавающие предметы или другие препятствия или преграды на поверхности воды, которые могут сталкиваться с буксируемыми компонентами морской сейсморазведочной системы.
Предпочтительно, чтобы в случае покрытых льдом районов система 10А включала в себя ледокольное судно 20, которое вскрывает ледяной покров перед буксирующим судном 30. При работе ледокольное судно 20 разрушает паковый лед и отклоняет в сторону обломки ледяного поля, чтобы создавать непрерывную полосу для прохождения буксирующего судна 30. Когда буксирующее судно 30 буксирует одну или несколько буксируемых кос 60, система 45 энергоснабжения приводит в действие источник 90, а в управляющей системе 40, имеющей сейсмический регистратор, регистрируются сейсмические данные, получаемые датчиками 70 на буксируемых косах 60.
Поскольку буксирующее судно 30 работает в покрытых льдом или водах или водах с препятствиями, защитное устройство 50 на буксирующем судне 30 соединено с буксирными тросами 65, которые поддерживают буксируемые косы 60. (Хотя показаны многочисленные буксируемые косы 60, при желании система 10А может иметь одну буксируемую косу 60). Как рассматривается ниже, защитное устройство 50 (называемое в этой заявке ледовым скегом) удерживает буксирные тросы и кабели для буксируемых компонентов на расстоянии от обломков ледяного поля на поверхности воды. Таким образом, ледовый скег 50 позволяет судну 30 буксировать буксируемые косы 60 в покрытых льдом водах и в то же время осуществлять управление различными нагрузками, создаваемыми движениями судна 30, силами от буксируемых тел и взаимодействиями со льдом.
В общем случае ледовый скег 50 можно располагать на судне 30 где угодно. Однако, как лучше всего показано на фиг. 1А, предпочтительно, чтобы ледовый скег 50 продолжался от корпуса судна на корме. Это положение за кормой лучше подходит для выпускаемых кабелей, буксирных тросов и других компонентов морской сейсморазведочной системы, буксируемой судном 30. В одной компоновке ледовый скег 50 является неподвижным дополнением к судну 30, которое на судоремонтном заводе можно приваривать, встраивать или иным образом прикреплять к существующей конструкции корпуса судна. Как вариант судно 30 можно заранее проектировать и строить с подходящим ледовым скегом 50, встроенным в конструкцию корпуса, или ледовый скег 50 может быть развертываемым компонентом, снабженным соответствующими механизмами для развертывания и удержания его на судне 30. В еще одной компоновке скег 50 может быть съемным или независимым компонентом, который можно временно устанавливать на борту судна без необходимости модификации корпуса судна.
Продолжающийся ниже ватерлинии судна ледовый скег 50 удерживает точки крепления буксирных тросов 62/92 ниже поверхности воды. Этим буксирные тросы 62/92 удерживаются ниже любых обломков ледяного поля, плавающих на поверхности воды, которые могут сталкиваться с буксирными тросами 62/92 или собираться около них. Кабели 65 буксируемых кос, соединенные с сейсмическим регистратором управляющей системы 40, протянуты от судна 30, а скег 50 направляет эти кабели 65 буксируемых кос ниже поверхности воды, так что лед не будет сталкиваться с ними или собираться около них. Глубина, необходимая для эффективного удержания буксирных тросов 62 кабелей буксируемых кос и кабелей 65 буксируемых кос ниже уровня льда, может зависеть от конкретной реализации. В качестве одного примера ледовый скег 50 может продолжаться приблизительно на 7 м ниже ватерлинии судна 30. Однако в зависимости от вида ледового режима, в условиях которого работает судно, размера судна и других факторов это расстояние может меняться для данной реализации.
В представленной компоновке сейсмический источник 90 подвешен горизонтально в водной толще позади судна 30 и имеет множество элементов 91 сейсмического источника, которые обычно представляют собой воздушные пушки. (Хотя показан один источник 90, в системе 10А можно использовать несколько источников). Кабель 95 электропитания, соединенный с системой 45 энергоснабжения, протянут от судна 30, а ледовый скег 50 направляет этот кабель 95 электропитания также ниже поверхности воды, так что он находится в стороне от льда. Буксирный трос 92 соединяет кабель 95 с ледовым скегом 50 и содействует буксировке источника 90 позади судна 30.
Предпочтительно, чтобы кабель 95 электропитания был плавучим, а источник 90 мог быть стабилизирован одним или несколькими плавучими устройствами или буями 94. Поскольку лед движется по поверхности воды, плавучее устройство 94 можно проектировать для управления взаимодействиями со льдом, когда оно плавает на поверхности. В соответствии с этим плавучему устройству 94 можно придавать определенную форму, чтобы минимизировать соударения со льдом, и его можно располагать горизонтально для рассекания любых обломков ледяного поля на поверхности. Однако, как рассматривается более подробно ниже, предпочтительно, чтобы плавучее устройство было рассчитано на исключение контакта со льдом за счет плавания ниже поверхности.
Для буксировки горизонтального источника 90 позади судна 30 буксирный трос 92 прикреплен под водой к основанию ледового скега и соединен с источником 90, подвешенным ниже поверхности воды. Один или несколько поддерживающих тросов соединяют плавучее устройство 94 с источником 90. Кабель 95 электропитания протянут от конца судна 30, проходит через канал в ледовом скеге 50 и соединен с источником 90 для приведения его в действие.
В общем случае буксирные тросы 62/92, буксируемые косы 60, датчики 60, кабели 65/95, управляющая система 40 и система 45 энергоснабжения могут быть обычными компонентами, известными и используемыми при морской сейсморазведке. Например, при формировании надлежащего сигнала сейсмического источника элементы 91 источника могут работать любым известным способом. Кроме того, в буксируемых косах 60 можно использовать кабели с нейтральной плавучестью для поддержания соответствующих морских сейсмических датчиков 70. По существу, каждая буксируемая коса может иметь несколько секций, при этом каждая имеет наружную оболочку для защиты внутреннего пространства от воды и на всем протяжении длины имеет осевые элементы для осевой прочности. Каждая секция буксируемой косы 60 может также иметь жгут проводов, по которым передается электрическая энергия, и провода для передачи данных. В случае двухпроводной линии датчики 70 обычно представляют собой гидрофоны, расположенные внутри буксируемой косы 60.
Как дополнительно показано на фиг. 1В, параваны, стабилизаторы или заслонки 64 и распорку 66 можно использовать для поддержания многочисленных буксируемых кос 60 позади буксирующего судна 30. Эти параваны 64 и распорка 66 также могут быть аналогичными обычным компонентам, используемым при морской сейсморазведке, за исключением того, что, как рассматривается далее, параваны 64 предпочтительно буксировать ниже поверхности воды.
С учетом понимания раскрытой системы теперь рассмотрение будет обращено на конкретные компоненты системы, начиная с ледового скега.
В. Скег с одним кабелепроводом
Как рассматривалось выше, на буксирующем судне 30 ледовый скег 50 используют для удержания буксирных тросов 62/92 и кабелей 65/95 на расстоянии от обломков ледяного поля на поверхности воды. Как показано на фиг. 2А-2В, согласно одному осуществлению ледовый скег 100А установлен на корме 32 сейсмического буксирующего судна 30, используемого для буксировки сейсмических буксируемых кос (непоказанных). Как отмечалось ранее, скег 100А можно устанавливать на судне 30 где угодно, включая порт, правый борт, нос или шахту в корпусе, предназначенную для спуска и подъема оборудования. Однако, поскольку буксируемые косы (непоказанные) лучше всего буксировать позади судна 30, задняя часть или корма 32 является предпочтительной, при этом будет оказываться содействие разрушению обломков ледяного поля при буксировке буксируемых кос.
В этом осуществлении ледовый скег 100А представляет собой один кабелепровод, продолжающийся от кормы 32 судна 30. Чтобы существенно не мешать управлению судном и выполнению других функций, этот ледовый скег 100А с одним кабелепроводом предпочтительно использовать на судне, имеющем два гребных винта 36, хотя его можно использовать на судах других типов. Ледовый скег 100А продолжается ниже корпуса между слипами 34, используемыми для выпуска и выбора буксируемых кос и кабелей. На всем протяжении задней или выходной кромки в скеге 100А образован открытый проход или канал 120 для пропускания кабелей буксируемых кос, кабелей источника и натяжных тросов, рассматриваемых далее.
Даже хотя скег 100А продолжается от кормы 32, при разведке в покрытых льдом водах лед может втягиваться в поток вдоль днища корпуса судна. Этот втягиваемый лед в конечном счете достигает кормы 32 судна 30, где он снова всплывает. В других ситуациях лед, сталкивающийся с носом судна 30, может втягиваться под корпус судна и затем стремиться всплыть к корме 32, когда судно 30 движется вперед. В любом случае скег 100А действует как защитный кабелепровод, удерживая буксирные тросы, кабели и т.п. на расстоянии от этого льда.
На своем дистальном конце скег 100А имеет основание или пластину 110, на которой предусмотрены точки 114/116а-b крепления буксирных тросов. Таким образом, скегом 100А обеспечиваются буксировочные точки 114/116a-b ниже поверхности воды и на расстоянии от обломков ледяного поля на поверхности. В дополнение к остальной защите от обломков ледяного поля эти подводные буксировочные точки 114/116a-b также способствуют поддержанию буксируемых кос и источника ниже поверхности.
На фиг. 2C-2D показаны дополнительные детали ледового скега 100А, иллюстрирующие ледовый скег 100А, установленный на судне 30. Как лучше всего показано на фигуре 2С, дистальный конец скега 100А расположен примерно на глубине киля судна, а буксировочные точки 114/116, упомянутые выше, удерживаются ниже ватерлинии 31 судна.
Как показано на фиг. 2С, кабели 65 буксируемых кос и кабели 95 электропитания спускают с судна 30 по слипам 34 (см. также фигуру 2D). Кабели 65/95 проходят по каналу 120 в ледовом скеге 100А. В свою очередь, канал 120 направляет кабели 65/95 ниже ватерлинии 31 судна к основанию 110 скега, откуда кабели 65/95 могут затем следовать за судном 30 без помехи со стороны обломков ледяного поля.
Один или несколько подкрепляющих кабели элементов или ограничителей 130 изгиба удерживают кабели 65/95 в канале 120 скега, а натяжные тросы 132 проходят по каналу 120 и прикреплены к этим подкрепляющим кабели элементам 130. В дополнение к этому стальные направляющие 124 в канале могут поддерживать кабели 65/95, а криволинейный проход 126 может быть предусмотрен для натяжных тросов 132, чтобы они могли выводиться по каналу 120 отдельно от кабелей 65/95. Натяжные тросы 132 могут иметь диаметр около 5/8 дюйма (16 мм), так что от трех до четырех натяжных тросов 132 можно поместить в проход 126 направляющей. Каждый натяжной трос 132 ведет к гидравлической лебедке 134, используемой для вытягивания троса 132 и прикрепленного подкрепляющего элемента 122, к которому он присоединен.
Как показано на виде сверху из фигуры 2D, судно 30 имеет слипы 34, ведущие с кормы судна, предназначенные для прохождения буксируемой косы и кабелей электропитания (непоказанных). Другие слипы 35 также предусмотрены и выровнены относительно лебедок 37, предназначенных для удержания буксировочных и выбирающих тросов сейсморазведочной системы. Таким образом, судно 30 может иметь эти и другие обычные элементы, известные и используемые в области морской сейсморазведки.
Что касается фиг. 3А-3В, то верхний удлинитель 106 и внутренний угол 108 ледового скега 100А можно проектировать так, чтобы они подходили к существующему судну и его ледовой наделке. Как показано на этих поперечных сечениях, ледовый скег 100А внутри является полым и имеет наружные стенки 102 оболочки и внутренние опоры 104. Например, в одной реализации скег 100А может иметь внутренний объем приблизительно 14м3 и может весить около 27 т.
Полый внутренний объем придает скегу 100А некоторую плавучесть, которая может способствовать поддержанию массы скега на судне 30. Чтобы гарантировать отсутствие воды в скеге 100А, скег 100А можно снабжать средством зондирования, а также средством обезвоживания. С этой целью, как показано на фиг. 3А-3В, скег 110А может иметь внутренний канал 105, продолжающийся от нижней части до верхней части и снабженный трубой 107 и запорным клапаном 109 на палубе судна.
Как лучше всего показано на фиг. 3С, основание 110 ледового скега может быть в виде ребра или наклонных пластин, хотя можно использовать другие формы. Основание 110 может быть прикреплено к дистальному концу скега 100А. Как вариант основание 110 может быть установлено на поворотном механизме или шарнире, чтобы его можно было поворачивать в поперечном и/или вертикальном направлении. Как показано, пластина основания 110 имеет кронштейны 112 для прикрепления к концу основной части скега. Как также показано, основание 110 имеет отверстие 113 для прохождения трубы (107; фиг. 3В) и имеет три буксировочные точки 114/116a-b.
Крайние буксировочные точки 116a-b можно использовать для буксирных тросов, которые поддерживают источники (непоказанные), а центральную буксировочную точку 114 можно использовать для буксирного троса, который поддерживает одну или несколько буксируемых кос (непоказанных). В одной реализации каждая из крайних буксировочных точек 116a-b может быть рассчитана на нагрузку 5 т, а центральная буксировочная точка 114 может быть рассчитана на нагрузку 18 т. В зависимости от реализации могут быть образованы другие конфигурации буксировочных точек и предусмотрены другие уровни нагрузки. Кроме того, скег 100А может иметь буксировочные точки 114/116a-b, размещенные на других местах, и можно предусматривать больше или меньше точек по сравнению с показанными.
На фиг. 4А-4С представлены подробности относительно того, каким образом кабели 65/95 выпускаются и удерживаются в скеге 100А. В этой компоновке операторы обычным способом выпускают в воду буксируемые косы 60 (одна показана), источники 90 (два показаны), кабели 65/95, буксирные тросы 62/92 и другие компоненты. Как и в типичном случае, буксируемую косу 60 можно выпускать с некоторым количеством датчиков и устройств (непоказанных), прикрепленных к ней. Датчики могут определять скорость буксируемой косы в воде, курс и т.д. Устройства могут регулировать положение буксируемой косы 60 при буксировке. Следовательно, можно делать так, чтобы компоненты системы 10А находились в области, в значительной степени чистой от льда (то есть за пределами исследуемого покрытого льдом района), поскольку может понадобиться выпускать кабели 65/95 и буксирные тросы 62/92 с кормы судна и пропускать непосредственно в воду без защиты скегом 100А.
Как только буксируемые косы 60, источник 90 и другие компоненты начинают буксировать в воде, кабели 65 буксируемых кос и кабели 95 источника выпускают совместно с ограничителями 130 изгиба, расположенными на них и соединенными буксирными тросами 133 со скегом 100А. Ограничитель 130 изгиба может задавать изгиб, чтобы, как рассмотрено ниже, способствовать заправке кабеля 65/95 в канал 120 скега 100А. Кольца или другие соединительные элементы 131 на ограничителях 130 могут быть прикреплены к кабелям 65/95 и в то же время могут скользить по кабелям 65/95 при вытягивании их в канал 120 скега.
Натяжной трос 132 протянут от лебедки 134а до прохода в скеге 100А. Кроме того, поддерживающие тросы 133 могут удерживать эти ограничители 130 в заданном положении и могут прикрепляться к лебедкам 134b на судне 30. Операторы используют лебедку 134а натяжного троса, чтобы вытаскивать натяжной трос 132. Таким способом ограничитель 130 (и прикрепленный кабель) вытягивают в канал 120 скега 100А. Эти процессы повторяют для каждого из кабелей (источника или буксируемой косы), чтобы они были защищены в канале 120 скега. Вдоль кормы 32 судна в верхней части канала 120 скега можно предусмотреть ряд пазов 121 для размещения любых тросов или кабелей, пропускаемых в канал 120 скега.
После того как каждый из кабелей 65/95 вытянут в канал 120, а ограничители 130 и все буксирные тросы закреплены, судно 30 может перейти в покрытый льдом район для разведки. В таком случае при встрече с обломками ледяного поля скег 100А может защищать кабели 65/95, протянутые от судна 30, и удерживать буксировочные точки для буксировочных тросов 62/95 ниже поверхности воды.
Вариант ледового скега 100В на фиг. 5 аналогичен предшествующему скегу 100А. В этом скеге 100В канал 120 скега 100В имеет множество поперечных стержней 123 для поддержки. Этими стержнями 123 также обеспечиваются зазоры для прохождения натяжных тросов 132 для ограничителей 130, используемых для вытягивания и удержания кабелей в канале 120 скега. Как должно быть понятно на основании рассмотрения этих и других конструкций скега, раскрытых в этой заявке, в зависимости реализации ледовый скег 100 может иметь больше или меньше сложных элементов.
С. Скег с многочисленными кабелепроводами
В ранее описанных скегах 100А-В предусмотрен единственный кабелепровод, направленный вниз от центра кормы 32 судна, который может лучше всего подходить для судна 30 с двумя гребными винтами 36. В качестве варианта ледовый скег 100С из фигур 6А-6В снабжен двумя или большим количеством кабелепроводов или проходов, направленных вниз от кормы 32 судна, и может использоваться с судном 30, имеющим один гребной винт 36 и руль 37.
Как показано на кормовом виде из фиг. 6А, скег 100С по каждую сторону гребного винта 36 судна имеет два канала 150А-В, которые проходят от кормы 32 судна 30 и под поверхность воды. Таким образом, кильватерная струя гребного винта 36 и руля 34 судна 30 может оставаться относительно свободной в открытом пространстве между каналами 150А-В.
Как также показано, дистальные концы этих двух каналов 150А-В соединены с задней кромкой пластины 140 основания. Пластина 140 основания может иметь различные формы. Например, как показано на фиг. 7А, пластина 140 основания одного вида может иметь замкнутую треугольную форму, при этом передняя кромка 142 предназначена для закрепления на киле 38 судна сваркой или другим способом. В качестве варианта на фиг. 7В (и фиг.6А) показана пластина 140В основания другого вида, в которой может быть образовано отверстие 146, благодаря которому можно снизить общую массу пластины 140В. В любом случае сама пластина 140А-В может содержать полые камеры для уменьшения массы и может быть заполнена плавучими материалами.
Как лучше всего показано на фиг. 6В, пластина 140 основания на переднем конце 142 соединена с килем 38 судна 30. Как указывалось ранее, пластина 140 основания имеет буксировочные точки 144 для закрепления буксирных тросов 62/92, используемых для поддержания буксируемых кос и источника сейсмической системы. Например, как показано на фиг. 7А-7В, эти буксировочные точки 144 могут лежать на всем протяжении задней кромки пластины 140. В дополнение к этому точки 145 крепления для каналов 150А-В также предусмотрены на задней кромке пластин 140А-В.
D. Компоновки источника
1. Горизонтальный источник
Как отмечалось ранее, в осуществлениях морской сейсморазведочной системы может использоваться горизонтальный источник. На фиг. 8A-8D показаны компоновки морских сейсморазведочных систем 10В с использованием сконфигурированных горизонтально источников 250, буксируемых в стороне от ледового скега 100 на буксирующем судне 30. Как показано, каждый источник 250 имеет плиты 252 пушек, взаимно связанные кабелями 254. В дополнение к этому в соответствии со способом, рассмотренным ранее, каждый источник 250 соединен с помощью буксирного троса 220 и плавучей линии 230 электропитания с ледовым скегом 100 на судне 30. Каждый источник 250 отклонен относительно кабеля 65 буксируемой косы, протянутого от ледового скега 100 и поддерживаемого буксирным тросом 62.
Предпочтительно, чтобы при выполнении разведки источник 250 был стабилизирован в воде на заданной или известной глубине. Как отмечалось ранее, источник 250 может поддерживаться обычным плавучим устройством, имеющим один или несколько удлиненных поплавков (непоказанных), которые плавают на поверхности воды. Конечно, использование таких обычных поплавков для поддержания источника 250 в покрытых льдом водах представляет собой самую простую форму реализации.
Поскольку лед движется по поверхности воды, предпочтительно обращать внимание на столкновение льда с таким плавающим на поверхности устройством. В соответствии с этим плавающему на поверхности устройству можно придавать определенную форму, чтобы минимизировать столкновения со льдом при пересечении любых обломков ледяного поля. Например, плавающее на поверхности устройство может иметь несколько поплавков на поверхности, соединенных друг с другом, а каждый поплавок может иметь форму, способствующую уклонению от льда. В дополнение к этому взаимно соединенные, плавающие на поверхности воды поплавки могут быть соединены буксирным тросом с кормой судна 30.
Однако при разведке в покрытых льдом водах такое обычное, плавающее на поверхности устройство может постоянно ударяться о лед и может сдвигаться с места льдом, захватываемым вертикальными тросами, соединяющими поплавки с горизонтальным источником 250. Для поддержания источника 250 в раскрытой системе 10В предпочтительно использовать плавучие устройства 200A-D, показанные на фигурах 8A-8D, которые буксируются ниже поверхности воды и меньше подвергаются воздействию ударов льда.
а. Плавучие устройства
На фиг. 8А первое плавучее устройство 200А имеет индивидуальные буи 210, которые поддерживают горизонтальный источник 250. По меньшей мере некоторые из плит 252 источника индивидуально соединены с одним из буев 210 тросом 212. Это позволяет каждому бую 210 перемещаться вокруг льда и под льдом на или ниже поверхности воды. В общем случае буям 210 может быть предоставлена возможность плавания на поверхности. Однако в устройстве 200А из фиг. 8А предпочтительно осуществлять постановку буев 210 для плавания ниже поверхности воды при буксировке позади ледового скега 100. Поскольку скегом 100 буксирный трос 220 и линия 230 электропитания приводятся ниже поверхности воды, источник 250 и буи 210 будут лучше поддерживаться ниже поверхности воды и на расстоянии от любых обломков ледяного поля.
Как показано, для ослабления проблем, связанных с захлестыванием, буи 210 могут быть привязаны короткими тросами 212, чтобы при буксировке они плавали приблизительно на 4-8 м ниже поверхности воды. В общем случае длина этих тросов 212 может быть около 6 м, а глубина буксировки источника 250 может составлять около 19 м.
В дополнение к коротким тросам 212 часть плит 252 источника может поддерживаться буем 210 и тросом 212. В этом примере первая плита 252 источника может поддерживаться по существу соединением 256 буксирного троса 220 и линии 230 электропитания к источнику 250. В таком случае более короткий передний буй 214 и трос 216 могут поддерживать вторую плиту 252 источника, а остальные пять плит 252 источника могут поддерживаться более крупными буями 210 и более длинными тросами 212. Небольшой буй 214 может иметь длину около 1 м, тогда как более крупные буи 210 имеют длину около 2,5 м. В других компоновках каждая плита 252 источника может иметь свой собственный буй 210, присоединенный с помощью троса 212. Кроме того, соединение 256 буксирного троса 220 и линии 230 электропитания к источнику 250 может поддерживаться собственными буем и тросом (непоказанными).
При буксировке позади скега 100 буи 210/214 погружаются. Этим обеспечивается стабильность буев 210/214 и ослабляются проблемы, связанные с отклонением и столкновением с обломками ледяного поля. Хотя исходно это не предусмотрено, источник 250 может на самом деле плавать на по существу подходящей глубине, когда поддерживается индивидуально привязанными буями 210/214. По существу, совместное действие сопротивления погруженных буев 210/214, скорости буксировки, удержания источника 250 поодаль от скега 100 и других факторов определяют нейтральную плавучесть источника 250 в воде. В зависимости от реализации, используя большее или меньшее количество буев 210/214, можно способствовать стабилизации глубины погружения источника 250.
Для стабилизации глубины погружения источника 250 плавучее устройство 200В на фиг. 8В имеет буи 210, в совокупности расположенные горизонтально. Количество используемых буев 210 можно изменять, чтобы плавучесть источника была нейтральной. В этой компоновке многочисленные буи 210 привязаны на одном конце тросами 212 к индивидуальным плитам 252 пушек источника 250, а другие концы буев 210 присоединены к концам на соседних буях 210. Таким образом, каждый буй 210 гибко соединен с соседними буями 210. Как вариант гибко соединенным буям 210 в качестве плавучего устройства 200В можно использовать единственный удлиненный буй (непоказанный), удерживаемый привязным тросом 212 и предназначенный для плавания при буксировке ниже поверхности воды.
В качестве другого варианта в плавучем устройстве 200С из фигуры 8С использован удлиненный поплавок 260. Внутри этот поплавок 260 на всем протяжении длины разделен на несколько объемов (например, полостей или камер) 262. В противоположность показанному удлиненному разделенному поплавку плавучее устройство 200С может содержать несколько индивидуальных поплавков, индивидуально привязанных или гибко соединенных друг с другом (как на фиг. 8А-8В), а для регулирования плавучести один или несколько из этих поплавков могут иметь заполняемый объем. Когда поплавок 260 буксируют позади скега 100, то при необходимости эти объемы 262 можно избирательно наполнять воздухом или наполнять водой, чтобы поддерживать заданную глубину погружения источника 250.
Например, элементы 262 могут быть регуляторами, а кабельный отвод 266 от кабеля 230 электропитания источника может подключаться к регуляторам 264 для каждого из объемов 262. Для регулирования плавучести поплавка 260 регуляторы 264 могут добавлять воздух в объемы 262 или выпускать из них. Таким образом, поплавок 260 может поддерживаться на заданном уровне и оставаться невосприимчивым к препятствиям на поверхности или действию волн. В другом примере регуляторы 264 могут быть водяными насосами высокого давления, а объемы 262 могут заполняться сжатым воздухом и/или водой в регулируемом количестве.
В любом случае контроллер 268 управляет работой регуляторов 264 и осуществляет мониторинг их и контроллер 268 может быть соединен с индикаторами глубины на плитах 252 источника для определения и мониторинга глубины и ориентации источника 250. Как известно, плавучесть устройства 200С может зависеть от солености воды, температуры и других факторов, так что предпочтительно, чтобы контроллер 268 мог осуществлять местное или дистанционное управление. Хотя глобальная система позиционирования (GPS) не может использоваться для определения местоположения поплавка 260, контроллер 268 может находиться в связи с блоком 270 управления на судне 30 с помощью акустических сигналов или электрического кабеля в линии 230 электропитания, так что блок 270 управления может управлять контроллером 268 для изменения или коррекции положения (например, глубины) поплавка 260 во время разведки. В это плавучее устройство 200С можно встраивать компоненты, относящиеся к дистанционно управляемому буксируемому аппарату или глиссирующему бую и любой плавучести, и компоненты управления шагом гребного винта и креном, раскрытые в этой заявке.
В еще одной компоновке в плавучем устройстве 200D из фиг. 8D для поддержания источника 250 использованы парашюты или плавучие якоря 218, присоединенные тросами 212. Эти плавучие якоря 218 протягиваются по поверхности при буксировке источника 250. В случае, если плавучие якоря 218 сталкиваются с какими-либо обломками ледяного поля, индивидуальный плавучий якорь 218 может поглощать удар и затем возвращаться на поверхность покрытой льдом воды без значительного нарушения поддержки источника 250 другими парашютами 218. Как также показано, соединение 256 источника 250 с тросом 220 и кабелем 230 может поддерживаться плавучим якорем 218, а также тросом 212.
Хотя это не показано на фиг. 8А-8С, скег 100 может поддерживать несколько источников 250 и плавучих устройств 200A-D позади судна способом, аналогичным способу, показанному на фигуре 4А. Кроме того, хотя на фиг. 8А-8С показан один кабель 65 буксируемой косы, должно быть понятно, что с получением выгоды от этого раскрытия многочисленные кабели 65 буксируемых кос или группы таких кабелей 65 можно буксировать со скега 100.
b. Буи
Предпочтительно, чтобы конкретные буи 210, используемые для плавучих устройств 200А-В из фиг. 8А-8В, создавали небольшое лобовое сопротивление и отбрасывали лед. В дополнение к этому предпочтительно, чтобы буи 210 были стойкими к холодной воде и могли справляться с ударами льда. На фиг. 9А один буй 210а имеет форму удлиненного столба и имеет цилиндрический корпус с конусным концом, предназначенным для снижения лобового сопротивления и рассечения обломков ледяного поля и воды. На фиг. 9В другой буй 210b имеет цилиндрический корпус.
Конструкция этих буев 210a-b может быть аналогична конструкции ледовых столбовидных буев, используемых для обозначения судоходных каналов в районах, которые замерзают зимой. Одним производителем таких ледовых столбовидных буев является Sabik из Финляндии. При использовании для поддержки источника 250 буи 210a-b этих видов могут хорошо функционировать в покрытых льдом водах.
На обоих этих буях 210a-b привязной фал (непоказанный) может соединять с источником (непоказанным) передний соединительный элемент на конце буя 210a-b. Другой соединительный элемент может быть предусмотрен на другом конце для облегчения обращения с буем 210a-b или для присоединения его к другим буям, как в компоновке из фигуры 8В. В общем случае буи 210a-b могут быть длиной около 2,5 м или короче и могут быть шириной около 0,5 м, и буи 210a-b могут быть рассчитаны на получение приблизительно 25% резервной плавучести.
Для обоих буев 210a-b корпусы предпочтительно изготавливать в виде наружной оболочки из прочного пластического материала, такого как полиэтилен сверхвысокой молекулярной массы (ПСММ) или стойкий к ультрафиолетовому излучению полиэтилен, которые в условиях пониженных температур будут противостоять раскалыванию, отщеплению и отслаиванию. Предпочтительно, чтобы толщина стенки составляла 20 мм или больше. Внутри буи 210a-b могут иметь усиливающие элементы, такие как ребра или пластины, и буи 210a-b могут быть заполнены пенопластом с закрытыми порами, таким как пенополиуретан.
2. Вертикальный источник
Как отмечалось ранее, в осуществлениях разведочной системы в качестве сейсмического источника может использоваться горизонтальная группа пушек. В качестве варианта, показанного на фиг. 10, в системе можно использовать вертикальный источник 300, расположенный ниже ледового скега 50. Вертикальный источник 300 может быть неподвижно закреплен на ледовом скеге 50 с использованием стержня или мачты 304, которая продолжается вниз через ледовый скег 50. Эту мачту 304 можно выпускать через вертикальный канал (непоказанный) в ледовом скеге 50 или можно прикреплять к концу ледового скега 50 в то время, когда он находится в воде.
Как вариант элемент 304 вертикального источника 300 может включать в себя кабели, соединенные с ледовым скегом 50 и протянутые от него. Для удержания источника 300 в вертикальном положении (или по меньшей мере в вертикальной ориентации) при буксировке конструкция из одного или нескольких поплавков, балласта, стабилизаторов, лопастей или чего-либо подобного (непоказанных) может быть предусмотрена на вертикальном источнике 300 с тем, чтобы он буксировался в воде по существу в вертикальном положении, когда судно 30 выполняет разведку. Хотя источник 300 показан точно вертикальным относительно скега 50, его можно выполнять так, чтобы он буксировался под некоторым заданным углом и был относительно вертикальным.
Вертикальный источник 300 имеет множество элементов или пушек 302 источника, соединенных с системой 45 энергоснабжения линией 305 электропитания. Синхронизацию пушек 302 можно осуществлять способом, которым создается мощный единственный сигнал источника, путем возбуждения каждой из пушек 302 в источнике 300 акустическим импульсом, создаваемым другими возбуждающими пушками 302. Например, система 45 энергоснабжения сначала возбуждает находящуюся на наибольшей высоте пушку 302А. Затем система 45 энергоснабжения возбуждает следующую, отсчитываемую от самого верха пушку 302В в момент времени, соответствующий приходу направленного вниз акустического импульса, создаваемого первой пушкой 302А. Эта последовательность продолжается вниз по вертикальному источнику 300 из пушек 302, так что источник 300 может работать по существу как единственный источник, расположенный примерно в центре группы пушек 302. Кроме того, синхронизацию можно осуществлять так, чтобы результирующий акустический импульс был направлен вниз.
К сожалению, вертикальный источник 300 при буксировке в воде не может оставаться совершенно вертикальным (или в заданной вертикальной ориентации). Зыбь, столкновения со льдом, гибкое соединение источника 300 со скегом 50 и другие проблемы будут вызывать сдвиг источника 300 от вертикального положения (или заданной ориентации). Это изменяет местоположения пушек 302 и изменяет моменты времени, в которые должна осуществляться синхронизация возбуждений. Этот наклон, оставленный без учета, может изменить качество сигнала сейсмического источника, создаваемого источником 300, и регистрируемых результирующих данных.
Как показано на фиг. 11А-11С, вертикальный источник 300 можно наклонять под некоторым углом ±α наклона относительно его заданной ориентации, которая является вертикальной в этом примере. Определяют этот угол ±α наклона вертикального источника 300 и соответственно корректируют синхронизированное возбуждение пушек 302.
Угол ±α наклона источника 300 можно определять рядом способов. Как показано, инклинометр или датчик другого вида можно использовать для определения угла ±α наклона источника 300. Этот ставший известным угол ±α наклона используют для коррекции синхронизированного возбуждения пушек 302, чтобы поддерживать качество сигнала источника и чтобы делать сигнал источника ориентированным вниз. Следовательно, предпочтительно, чтобы синхронизация возбуждения пушек 302 была основана на переменном угле ±α наклона источника 300 и местоположении каждой пушки 302. Манипулируя синхронизацией пушек 302 на основании переменного угла ±α наклона, можно поддерживать высокое качество получаемого результирующего сигнала источника и можно сохранять предпочтительную ориентацию вниз.
Короче говоря, система 45 энергоснабжения сначала возбуждает самую верхнюю пушку 302А. Затем система 45 энергоснабжения возбуждает следующую, отсчитываемую от самого верха пушку 302В в надлежащий момент времени, регулируемый в соответствии с переменным углом ±α наклона так, что она возбуждает колебание в нисходящий акустический импульс, образованный первой пушкой 302А. Далее эта последовательность продолжается вниз по вертикальному источнику 300 из пушек 302. Если переменный угол α наклона является отрицательным (фиг. 11А), время между возбуждениями может возрастать. И наоборот, для некоторых пушек 302 время может сокращаться, если переменный угол α наклона является положительным (фиг. 11С). Несмотря на то, что время между возбуждениями может изменяться, в зависимости от реализации последовательность возбуждений пушек 302 также может изменяться.
Е. Выпускаемые устройства для разведочной системы
Во время морской сейсморазведки желательно определять, прослеживать и, возможно, регулировать положения буксируемых кос для лучшей регистрации и картографирования получаемых сейсмических данных. Определение положения можно делать, используя во время разведки отсчеты приемника глобальной системы позиционирования (GPS-отсчеты) относительно буксируемых кос. Однако в морских сейсморазведочных системах 10 настоящего раскрытия получение GPS-отсчетов может оказаться трудным, поскольку система 10 в немалой степени погружена ниже поверхности воды, так что приемники глобальной системы позиционирования (GPS-приемники) не могут работать для получения отсчетов. Теперь рассмотрим выпускаемые или управляемые устройства нескольких видов, которые можно использовать на буксируемых косах для получения GPS-отсчетов и в иных случаях для регулирования положения буксируемых кос во время разведки.
1. Плавучее выпускаемое устройство
На фиг. 12С показана морская сейсморазведочная система 10С, имеющая выпускаемое устройство 80А первого вида согласно настоящему раскрытию. Во время морской сейсморазведки осуществляют регулировку и мониторинг местоположений буксируемых кос 60, так что положения группы датчиков 70 могут считаться известными для надлежащей регистрации и анализа данных. Например, GPS-координаты задних концов буксируемых кос можно использовать для согласования положений всех датчиков 70 на различных буксируемых косах 60, а в управляющей системе 40 эти согласованные положения использовать при регистрации данных, анализе и управлении. Подходящая система для регистрации, анализа и управления включает в себя интеллектуальную систему регистрации от ION Geophysical, которая может определять местоположения буксируемых кос 60. Такая система может направлять буксируемые косы 60 при использовании систем DIGIFIN™ направления буксируемых кос и программного обеспечения ORCA® командного управления, которые можно получить от ION Geophysical. (DIGIFIN является зарегистрированным товарным знаком ION Geophysical, Corporation, а ORCA является зарегистрированным товарным знаком Concept Systems Holdings Limited.)
В предложенной разведочной системе 10С буксируемые косы 60 перемещаются погруженными ниже поверхности воды при использовании скега 50 и других элементов, раскрытых в этой заявке. Кроме того, еще необходимо определять местоположения буксируемых кос 60. Для получения местоположения данной буксируемой косы 60 в системе 10С на фиг. 12А используется выпускаемое устройство 80А, которое плавает на поверхности воды на заднем конец буксируемой косы 60.
Выпускаемое устройство 80А может быть буем столбовидного вида, предназначенным для решения проблемы соударений со льдом и отталкивания обломков ледяного поля при нахождении на поверхности. Устройство 80А включает в себя GPS-приемник 82, который может получать GPS-координаты для выпускаемого устройства 80А, когда оно буксируется позади судна 30 совместно с буксируемой косой 60. Для получения GPS-координат можно использовать обычные способы, известные в данной области техники, так что они не описываются подробно в этой заявке. Например, подробности, относящиеся к определению местоположения подводной буксируемой кабельной косы 60 на основании глобальной системы позиционирования (GPS), можно обнаружить в патенте США №7190634, который включен в эту заявку путем ссылки.
Когда судно 30 буксирует буксируемую косу 60, источник 90 создает сигналы источника, а датчики 70 обнаруживают сейсмические сигналы. Управляющая система 40 получает GPS-координаты с выпускаемого устройства 80А при использовании буксируемой косы 60 и других линий для связи и электропитания GPS-приемника 82. В таком случае при использовании способов, известных в данной области техники, управляющая система 40 определяет местоположение буксируемой косы 60, датчиков 70, источника 90 и других компонентов относительно судна 30 и физические координаты разведываемого района.
Хотя в морской сейсморазведочной системе 10С из фиг. 12А использовано плавучее выпускаемое устройство 80А, оно в общем случае может считаться надводным устройством 80А, если только рассчитано на столкновение с некоторым количеством обломков ледяного поля, препятствием или чем-либо подобным. Без этого надводное устройство 80А может затягиваться льдом, повреждаться при соударениях, сдвигаться с места или теряться. Поэтому, как описывается ниже, в некоторых ситуациях можно использовать выпускаемое устройство погружного типа.
2. Управляемые выпускаемые устройства
Предшествующее выпускаемое устройство 80А было предназначено для плавания на поверхности. На фиг. 12В выпускаемое устройство 80В включает в себя создающее сопротивление устройство 310 и буй 320. Как показано, создающее сопротивление устройство 310 может быть плавучим якорем, хотя можно использовать любое другое устройство, известное в данной области техники. Плавучий якорь 310 прикреплен к заднему концу буксируемой косы 60, и может быть предусмотрен модуль 312, в котором размещены различные электронные компоненты, такие как деклинометр, компас, инерциальная навигационная система и т.п.
Плавучий якорь 310 создает лобовое сопротивление, когда буксируемую косу 60 буксируют, а положение (глубину, боковое отклонение и т.д.) буксируемой косы 60 можно регулировать другими способами, раскрытыми в этой заявке. Буй 320 оттянут от заднего конца буксируемой косы 60, плавучего якоря 310 или модуля 312 с помощью соединителя 342 и механической связи 326. Предпочтительно, чтобы соединитель 324 создавал низкое сопротивление.
В зависимости от компоновки буй 320 может постоянно плавать на поверхности с помощью соединителя 324 или может обладать способностью перемещаться на поверхность или от поверхности при столкновении со льдом. Например, соединитель 324 может быть неподвижной мачтой, которая продолжается от заднего конца буксируемой косы 60, а механическая связь может быть поворотной. Однако предпочтительно, чтобы соединитель 324 был гибким привязным фалом с низким сопротивлением, и предпочтительно, чтобы механическая связь 326 могла разрушаться при заданном натяжении.
И в этом случае предпочтительно, чтобы буй 320 был буем столбовидного типа, выполненным из эластичной пластмассы для противостояния столкновениям со льдом и т.п. Также предпочтительно, чтобы буй 320 имел достаточный балласт. Поэтому, когда буй 320 плавает на поверхности, то предполагается, что он отталкивает обломки ледяного поля и отходит на расстояние от льда и затем возвращается на поверхность, когда она становится доступной.
Буй 320 имеет GPS-приемник 322, который выступает над поверхностью воды (и, предпочтительно, выше любых волн) для получения GPS-отсчетов при условии, что буй 320 находится на поверхности. При буксировке буй 320 получает эти GPS-отсчеты непрерывно и передает их акустическим или другим способом к модулю 312 электроники на буксируемой косе 60 по линии 324. Если буй 320 сталкивается со льдом, буй 320 может опуститься ниже поверхности воды. Если это происходит в течение продолжительного периода времени, в разведочной системе могут использоваться компоненты в модуле 312 электроники для поддержания определенного положения заднего конца буксируемой косы 60 способами, рассматриваемыми ниже.
Как отмечалось в этой заявке, предпочтительно определять местоположение заднего конца буксируемой косы 60, чтобы в разведочной системе можно было прослеживать местоположение датчиков (непоказанных). Вследствие выхода на поверхность буй 320 получает GPS-отсчеты. Кроме того, буй 320 находится на некотором расстоянии (например, 20 м) от заднего конца буксируемой косы 60. Поэтому местоположение заднего конца буксируемой косы 60 должно определяться на основании известной информации.
В одном способе расстояние можно узнавать исходя из глубины погружения буксируемой косы 60, заданной длины линии 324, скорости буксировки и других переменных. На основании математического соотношения местоположение заднего конца буксируемой косы 60 (например, местоположение модуля 310) можно вычислять непосредственно. В другом способе буй 320 может излучать акустический сигнал, который считывается датчиком 316 на модуле 312, и эту информацию можно использовать для определения местоположения заднего конца буксируемой косы 60 относительно буя 320 для коррекции местоположения. Каждая буксируемая коса 60, буксируемая с судна, может иметь такой буй 320 и акустический датчик 316, чтобы для акустических сигналов, обнаруживаемых между буксируемыми косами 60 и буями 320 можно было использовать способы поперечной связи. В таком случае можно дополнительно выполнить триангуляцию ориентации буев 320 и буксируемых кос 60 и способствовать определению местоположений.
При плавании на поверхности буй 320 может затягиваться и задерживаться льдом. Однако при некотором заданном натяжении механическая связь 326 может разрываться, так что застрявший буй 320 может быть отделен от конца буксируемой косы 60. В таком случае могут быть потеряны только буй 320 и GPS-приемник 322, тогда как другая, потенциально более дорогая электроника в модуле 312 остается на месте на конце буксируемой косы 60.
Хотя выпускаемое устройство 80В может иметь один такой буй 320, предпочтительно иметь в резерве один или несколько таких буев 320' на случай потери первого буя 320. В соответствии с этим выпускаемым устройством 80В можно управлять для выпуска при необходимости резервного буя 320'.
Как показано, резервный буй 320' может удерживаться на конце буксируемой косы 60 в невыпущенном состоянии. Если выпущенный на данный момент времени буй 320 отрывается, механический активатор 326 может выпустить в линию следующий резервный буй 320'. Привязанный с помощью троса 324 и соединения 326, этот выпущенный буй 320' начнет всплывать на поверхность воды, чтобы выставить свой GPS-приемник для получения отсчетов. Механический активатор 314 может быть фиксатором, приводимым в действие соленоидом, или другим электронным устройством и может приводиться в действие вручную с судна (непоказанного) через посредство буксируемой косы 60 или приводиться в действие автоматически электроникой в модуле 312.
На фиг. 12С другое управляемое выпускаемое устройство 80С опять же включает в себя создающее лобовое сопротивление устройство или плавучий якорь 310 и буй 320. Буй 320 оттянут от заднего конца буксируемой косы 60 привязным тросом 324 с низким сопротивлением. Кроме того, буй 320 может предназначаться для отталкивания обломков ледяного поля и отхода на расстояние от льда и затем возращения на поверхность при ее доступности. Однако в случае, если поверхностный лед становится слишком тяжелым, лебедку 318, вьюшку или что-либо подобное можно привести в действие электродвигателем для вытягивания троса 324 и буя 320 обратно под поверхность. Когда условия улучшаются, операторы могут привести в действие лебедку 318 для выпуска буя 320. Кроме того, в этом выпускаемом устройстве 80С можно использовать многие другие элементы, раскрытые выше.
Как показано на фиг. 12D, морская сейсморазведочная система 10D имеет управляемое выпускаемое устройство 80D, глубину погружения которого можно регулировать. Во время разведки выпускаемое устройство 80D буксируют на конце буксируемой косы 60 ниже поверхности воды, чтобы исключать соударения с обломками ледяного поля. Для получения GPS-отсчетов выпускаемое устройство 80D имеет GPS-приемник 82а, который можно подводить к поверхности, управляя глубиной погружения устройства 80D. Поэтому предпочтительно буксировать выпускаемое устройство 80D на тросе совместно с буксируемой косой 60 и подводить к поверхности для получения GPS-отсчетов приемником 82d в соответствующие моменты времени.
На фиг. 13А-13В показано выпускаемое устройство 80D в двух рабочих состояниях. В стандартном состоянии плавного движения из фиг. 13А выпускаемое устройство 80D следует под водой позади буксируемой косы 60. Это положение является пригодным, когда обломки ледяного поля, препятствия или что-либо в этом роде находятся на поверхности воды, которые могут повреждать или блокировать выпускаемое устройство 80D. При обнаружении разводья на поверхности выпускаемое устройство 80D может подняться на поверхность, чтобы GPS-приемник 82d мог получать GPS-отсчеты. Для адекватного картографирования буксируемых кос 60 и датчиков 70 может возникнуть необходимость делать эти GPS-отсчеты на периодических интервалах, чтобы можно было с достаточной точностью прослеживать местоположения буксируемых кос 60 и датчика 70.
Выпускаемое устройство 80D может быть управляемым аппаратом, устройством или глиссером. Например, в одной компоновке выпускаемое устройство 80D может быть дистанционно управляемым аппаратом, имеющим двигательную систему и управляемые стабилизаторы или что-либо подобное для направления выпускаемого устройства 80D в заданные положения в воде при его буксировке. Как вариант выпускаемое устройство 80D может быть буксируемым глиссером, который перемещают вверх или вниз, используя управление плавучестью, описываемое более подробно ниже. В еще одном варианте выпускаемое устройство 80D может быть дистанционно управляемым буксируемым аппаратом, не имеющим двигательной системы, но имеющим управляемые стабилизаторы, также описываемым более подробно ниже.
На фиг. 14 показано осуществление выпускаемого устройства или управляемого аппарата 350А для раскрытой морской сейсмической системы. Аппарат 350А прикреплен к концу сейсмической буксируемой косы 60, которая обеспечивает электропитанием и связью аппарат 350А. Для этой цели может быть использован кабель-трос 61. Стабилизаторы 354/356 на аппарате 350А могут быть подвижными, а аппарат 350А может иметь двигательную систему 360, такую как гребной винт. Как вариант нет необходимости в том, чтобы стабилизаторы 354/356 были подвижными. Вместо этого, как описывается ниже, в аппарате 350А используется управление плавучестью. Более того, в аппарате 360 движущая сила не используется, а система 360 на аппарате 350А, как описывается ниже, фактически может быть тормозом.
Как показано, аппарат 350А имеет обнаружитель 365 для обнаружения препятствий на поверхности. Обнаружитель 365 может включать в себя гидролокатор, определитель профиля льда, оптический датчик, многолучевой фатометр, камеру или что-либо подобное, которые смотрят вверх и контролируют препятствия (или разводья) над аппаратом 350А. При регистрации морских сейсмических данных сигналы от обнаружителя 365 могут интегрироваться в навигационной и/или управляющей системе (непоказанной), такой как система Orca®. Таким образом, управляющая система может определять, когда поверхность над аппаратом 350А является свободной от льда и может подавать сигнал аппарату 350А на поднятие к поверхности воды.
В качестве одного примера в обнаружителе 365 может использоваться гидролокатор для обнаружения присутствия льда на поверхности. Например, если лед конкретной толщины имеется на поверхности, гидролокационный обнаружитель 365 может обнаруживать этот поверхностный лед, и в таком случае эта информация может использоваться для определения того, будет или не будет подниматься аппарат 350А. Хотя это зависит от функциональных возможностей, но предпочтительно, чтобы гидролокационный обнаружитель 365 мог обнаруживать лед толщиной, которая по меньшей мере меньше чем 1 м, чтобы аппарат 350А мог быть защищен от более толстого поверхностного льда, который может присутствовать.
В качестве другого примера обнаружитель 365 может быть оптическим датчиком, который измеряет имеющийся свет на поверхности, который может указывать на присутствие или отсутствие льда. В том же духе, обнаружитель 365 может быть цифровой камерой, с которой видеоданные или изображения вдоль буксируемой косы 60 передаются на буксирующее судно. Задние концы буксируемых кос 60 могут находиться на значительном расстоянии от буксирующего судна и операторы не способны определять, где находятся буксируемые косы 60 и какой лед может быть над аппаратами 350А. Следовательно, операторы могут наблюдать видеоданные или изображения с камеры 365 и определять, поднимать или нет конкретный аппарат 350А в случае, если имеется разводье. В таком случае это можно делать дистанционно путем приведения в действие аппаратов 350А сигналами, передаваемыми с судна к аппаратам 350А через посредство буксируемых кос 60.
Аппарат 350А также имеет GPS-приемник 352. Как показано, этот GPS-приемник 352 может быть расположен на направленном вверх стабилизаторе 356, так что антенна 352 может показываться над поверхностью воды, когда аппарат 350А плавно движется к поверхности для регистрации GPS-отсчетов. Для надлежащей регистрации и анализа данных независимо от того, каким образом GPS-приемник 352 всплывает, получаемые GPS-отсчеты передаются на систему управления приборами для определения местоположения буксируемой косы 60 и установки ее в заданное положение.
Поскольку непрерывные GPS-отсчеты не всегда являются доступными, аппарат 350А может включать в себя компас или деклинометр 367, который может быть соединен фалом с концом аппарата 350А, чтобы он удерживался на расстоянии от любой создающей помехи электроники. В деклинометре 367 можно использовать одноосевой магнитометр для измерения склонения магнитного поля Земли, и затем склонение можно скорректировать относительно отсчета на истинный север, вследствие чего посредством системы управления приборами можно определять положение конца буксируемой косы 60 в отсутствие GPS-отсчетов, обычно используемых с этой целью.
Аппарат 350А периодически получает GPS-отсчеты при выходе на поверхность для получения GPS-данных с GPS-приемника 352. В таком случае погружающийся под поверхность аппарат 350А может использовать ранее полученные GPS-данные наряду с данными инерциальной навигации, отсчетами компаса и текущими данными деклинометра для определения в реальном времени или почти в реальном времени местоположения буксируемой косы 60 на существующей основе до тех пор, пока не смогут быть получены новые GPS-отсчеты.
На фиг. 15 показано еще одно выпускаемое устройство или аппарат 350В и раскрыты некоторые внутренние детали и компоненты. На аппарате 350В стабилизаторы 354 не являются подвижными и в аппарате 350В двигательная установка не используется. Вместо этого в аппарате 350В используется средство регулирования плавучести, имеющее объем (например, мягкий резервуар) 380 в проницаемой задней части аппарата 350В. Объем этого мягкого резервуара 380 можно регулировать, используя насосную систему 382 нагнетания или аналогичную, так что плавучесть аппарата 350В можно изменять контролируемым способом.
Для изменения угла тангажа и крена аппарата 350В массу 370 можно сдвигать в осевом направлении по длине аппарата 350В или поворачивать вокруг оси. Предпочтительно, чтобы масса 370 была реальной батареей, используемой для электропитания электронных компонентов аппарата, которые включают в себя исполнительные приводы или другие электродвигатели для перемещения массы 370.
В отличие от GPS-приемника из фигуры 14 GPS-приемник 352, показанный на фиг. 15, расположен на конце протяженной штанги или мачты 353. Эта штанга 353 может продолжаться от аппарата 350В вверх под углом, так что GPS-приемник может выступать из воды, когда аппарат 350В плавно движется вблизи поверхности. Как вариант мачта 353 может поворачиваться на основании 355 от вытянутого вдоль линии аппарата 350В положения до отклоненного кверху положения. Когда аппарат 350В периодически доставляется на поверхность для получения GPS-данных, мачта 353 может приводиться в действие для поворота на этом основании GPS-приемника 352 с выходом его из воды.
В общем случае аппарат 350В может иметь элементы, аналогичные элементам, используемым в аппаратах и дрейфующих профилометрах, которыми в океанах измеряют подводные течения, температуры и т.п. Как таковой, аппарат 350В имеет шасси (непоказанное), содержащее систему 380 переменной плавучести, массу 370 и секцию 390 электроники. Изопикнический корпус 357, соответствующий плотности морской воды, может быть вставлен в секции на шасси. Затем корпус 357 и шасси могут быть вставлены внутрь стеклопластикового корпуса 351, имеющего стабилизаторы 354 и обтекаемую форму. Мачта 353 для GPS-приемника 352 может быть соединена с секцией 390 электроники и может выступать из корпуса 351.
3. Тормоз для выпускаемого устройства
Как ранее было показано, например, на фиг. 12В, буксируемая коса 60 удерживается ниже поверхности воды за счет использования ледового скега 50 и других элементов, раскрытых в этой заявке. Плавающая на глубине буксируемая коса 60 является свободной от всяких поверхностных натяжений и других состояний на поверхности воды, которые могут создавать значительное сопротивление буксируемой косы 60. Поэтому, если буксирующее судно 30 убавляет ход или прекращает буксировку вследствие столкновения с крупными обломками льда, препятствиями, отказов двигателей или возникновения других проблем, буксируемая коса 60 может проявить склонность к плавному движению под водой к корме судна 30. Обычно буксирующее судно 30 имеет избыточность систем (двигателей и т.д.) для предотвращения остановки. Однако в покрытых льдом водах судно 30, проходящее через обломки ледяного поля, может встречаться с любым количеством препятствий, которые замедляют или останавливают судно 30 независимо от этой избыточности.
Если плавному движению буксируемой косы 60 не препятствовать, буксируемая коса 60 может схлестнуться сама с собой, спутаться с другими буксируемыми косами 60 или даже попасть в гребной винт судна 30. Для уменьшения отрицательных последствий этих проблем в выпускаемом устройстве или аппарате 350 на буксируемой косе 60 можно использовать тормозной механизм для повышения сопротивления буксируемой косы 60 или применять реверсивную двигательную систему для перемещения буксируемой косы. В конкретном тормозе показанного на фиг. 16А аппарата 350 использован гребной винт 362. После приведения в состояние свободного вращения гребной винт 362 может вращаться и не создавать значительного сопротивления плавному движению аппарата 350. После приведения в действие в случае, если судно убавляет ход или останавливается, крутящий момент может быть приложен к гребному винту 362 для замедления его вращения и для создания сопротивления, которое замедляет плавное движение аппарата 350. Как вариант внутренний электродвигатель на аппарате 350 может поворачивать гребной винт для приложения обратной движущей силы.
Другой тормоз на фиг. 16В-16С имеет складные стабилизаторы 364. Показанные не выпущенными на фиг. 16В стабилизаторы 364 прилегают к борту аппарата 350, позволяя ему плавно двигаться в воде. Как показано на фиг. 16С, после приведения в действие вследствие убавления хода/остановки судна 30 стабилизаторы 364 выпускаются наружу от аппарата 350 для замедления плавного движения вперед аппарата 350. Приведением в действие стабилизаторов 364, а также других тормозов, раскрытых в этой заявке, может управлять управляющая система (непоказанная) на судне, находящаяся в связи с аппаратом 350 с использованием буксируемой косы 60.
На фиг. 17А-17С показан третий тормоз для аппарата 350 в невыпущенном, выпущенном и отделенном состояниях. В тормозе этого вида используется выпускаемый плавучий якорь 366. Исходно, как показано на фиг. 17А, плавучий якорь 366 сохраняется не выпущенным, при этом аппарат 350 имеет возможность плавно двигаться совместно с буксируемой косой 60. Например, плавучий якорь 366 может быть размещен на конце аппарата 350. Когда судно 30 убавляет ход или останавливается, то, как показано на фиг. 17В, плавучий якорь 366 выпускается от конца аппарата 350 для замедления плавного движения вперед аппарата 350 и буксируемой косы 60.
После выпуска плавучий якорь 366 раскрывается и следует позади аппарата 350, чтобы создавать сопротивление при протягивании через воду. В общем случае плавучий якорь 366 может принимать форму парашюта или конуса 367 и может удерживаться привязными тросами 369. В зависимости от нагрузок плавучий якорь 366 может иметь отверстия или окна для пропускания некоторого потока через них. После того как замедление аппарата 350 больше не является необходимым, плавучий якорь 366 может быть сброшен, как показано на фиг. 17С.
В одной компоновке аппарат 350 может иметь только один такой выпускаемый плавучий якорь 366. После выпуска для предотвращения движения буксируемой косы 60 вперед, когда судно убавляет ход или останавливается, плавучий якорь 366 может быть сброшен для обеспечения нормального функционирования аппарата 350. Однако в иных отдельных случаях аппарат 350 может оказаться неспособным к замедлению и остановке. Поэтому в других компоновках аппарат 350 может иметь несколько выпускаемых плавучих якорей 366, которые при необходимости могут выпускаться автоматически и затем сбрасываться после использования, так что в таком случае при необходимости позднее может быть использован еще один такой плавучий якорь 366.
Тормоза других форм также могут использоваться на аппарате 350 для замедления его перемещения вперед в том случае, когда прикрепленная буксируемая коса 60 движется вперед к судну. Например, тормоз 360 может включать в себя раскрывающиеся стабилизаторы, зонтичные структуры, парашюты и т.п. Эти элементы тормозов могут вытягиваться или выпускаться с аппарата 350 при инициировании прекращения перемещения вперед аппарата 350 и прикрепленной буксируемой косы 60.
F. Дополнительные компоновки для управления буксируемыми косами относительно судна
Выше были рассмотрены осуществления тормозов для выпускаемых устройств. В дополнение к этим осуществлениям другие компоновки можно использовать совместно с раскрытой системой для управления плавным движением буксируемых кос 60 к судну, когда оно убавляет ход или резко останавливается.
На фиг. 18А буксирующее судно 30 буксирует буксируемую косу 60, а создающая сопротивление установка 330, имеющая плавучий якорь 332 или что-либо подобное, тянется в хвосте буксируемой косы 60. На судне 30 натяжное устройство 342 контролирует натяжение спускного кабеля 65 буксируемой косы с использованием способов, известных в данной области техники. Хотя натяжение зависит от обстановки, его можно измерять непосредственно соответствующим устройством или его можно вычислять математически на основании скорости судна, длины буксируемой косы, диаметра буксируемой косы и величины создаваемого сопротивления, а также других факторов.
Уровень натяжения, независимо от способа его получения, вводится в контроллер 340, связанный с вьюшкой 344 для буксируемой косы 60. Если натяжение исчезает вследствие убавления хода или остановки судна 30, контроллер 340 приводит в действие вьюшку 344 для автоматического возвращения буксируемой косы 60 со скоростью, при которой может поддерживаться необходимое натяжение, а буксируемая коса может удерживаться от ухода под судно 30. Сигнал тревоги может звучать на судне 30, так что операторы могут подготовиться к извлечению устройств, установленных на буксируемой косе 60, если их необходимо быстро поднять на борт.
Для выбора буксируемой косы 60 может быть необходимо прежде всего высвободить кабель 65 буксируемой косы из ледового скега 50 путем расцепления и отделения ограничителя изгиба (непоказанного), рассмотренного ранее. Кроме того, операторам может потребоваться разъединить все буксирные тросы (непоказанные), присоединенные между скегом 50 и кабелем 65.
На фиг. 18В буксирующее судно 30 буксирует буксируемую косу 60, а создающая сопротивление установка 330, имеющая плавучий якорь 332 или что-либо подобное, тянется в хвосте буксируемой косы 60. На судне 30 в контроллере 336 использовано устройство мониторинга натяжения (непоказанное) или выполняются вычисления для мониторинга натяжения вводного кабеля 65 буксируемой косы с использованием способов, известных в данной области техники.
Если судно 30 убавляет ход или останавливается, контроллер 336 приводит в действие реверсивную двигательную установку 334, буксируемую на конце буксируемой косы 60. Как и в предшествующих рассмотрениях, эта реверсивная двигательная установка 334 может включать в себя гребной винт и электродвигатель, турбину или что-либо подобное. После приведения в действие установка 334 создает обратную движущую силу, которая замедляет движение вперед буксируемой косы 60 или по меньшей мере снижает ее скорость. В зависимости от деталей реализации, таких как масса буксируемой косы 60, скорость буксировки и другие факторы, обратная движущая сила, требуемая от установки 334, может составлять до 75 л.с. (55,95 кВт).
G. Выпускные компоновки для систем
Поскольку буксирующее судно 30 буксирует сейсмическую группу в покрытых льдом водах, выпуск сейсморазведочных компонентов предпочтительно производить с учетом возможных проблем, связанных с обломками ледяного поля, и тому подобных, которые могут препятствовать выпуску и выбору буксируемых кос 60 и источников 90. Как отмечалось ранее (в частности, при обращении к фиг. 4А-4С), выпуск и выбор систем можно выполнять, когда буксирующее судно 30 находится на расстоянии от крупного льда. Например, сейсмическую систему можно нормально выпускать до помещения кабелей в скег 50 и погружения различных компонентов.
При типичной реализации буксируемые косы 60 могут быть длиной несколько километров, и для выпуска сейсмической системы в разводье может требоваться значительная площадь, которая не всегда может быть доступна в покрытых льдом районах. Поэтому желательно уметь выпускать/выбирать раскрытые сейсмические системы на других площадях покрытого льдом района, включая площади, имеющие лед.
Для справки на фиг. 19А показано буксирующее судно 30, проходящее через покрытый льдом район, который не полностью чист от льда. Судно 30 имеет ледовый скег 50, от которого можно буксировать один или несколько источников и буксируемых кос. Судно 30 может разрушать лед и/или отталкивать обломки ледяного поля, когда оно идет, так что узкая площадь Z для выпуска находится в его кильватерной струе, где лед может относительно отсутствовать. Конечно, это зависит от того, насколько плотно упакован лед и каким образом его можно пройти.
Когда условия позволяют, предпочтительно быть в состоянии выпускать и выбирать буксируемые косы 60 группы в такой чистой площади Z. Следовательно, в способах выпуска и выбора при разведке в покрытых льдом водах предпочтительно использовать преимущества этой потенциально чистой площади Z. В примерах, приводимых ниже, рассмотрены сейсмические группы нескольких форм, которые могут быть выпущены и выбраны на таких площадях Z.
На фиг. 19В в сейсмической группе 11А первой формы использованы буксирные тросы 62 непосредственно от скега 50. Эти тросы 62 выпускают с параванами 64 на концах. Затем буксируемые косы 60, имеющие датчики 70 и выпускаемые устройства 80, могут быть выпущены в воду на чистую площадь Z и после этого соединены непосредственно с буксирными тросами 62 с использованием соединительных элементов 66, таких как шарнирное соединение. Эта компоновка может позволять выпускать отдельно несколько буксируемых кос 60 в теневой зоне судна 30, индивидуально соединенных с буксирными тросами 62.
Для справки на фиг. 9С показан пример паравана 240, который можно использовать совместно с раскрытой системой. Этот параван 240 имеет раму 244, удерживающую жалюзи или одну или несколько лопаток 242, предназначенных для соприкосновения с водой при буксировке. Поскольку параван 240 поддерживает буксируемые косы 60, буксируемые ниже поверхности воды, предпочтительно, чтобы параван 240 имел нейтральную плавучесть. В соответствии с этим параван 240 может иметь элемент плавучести или поплавок 246, расположенный на нем или соединенный с ним, который предназначен для придания паравану 240 нейтральной плавучести на заданной глубине. Элемент 246 плавучести может быть заполнен пенопластом или чем-либо подобным, или может содержать заполняемый объем (например, мягкий резервуар или камеру), раскрытый в этой заявке, для изменения его плавучести. В дополнение к этому параван 240 может иметь управляемые крылья (непоказанные), раскрытые в другом месте этой заявки, для регулирования глубины погружения паравана 240 при буксировке.
На фиг. 9D схематично иллюстрируется динамика паравана 240, имеющего элемент 246 плавучести. Как и следовало ожидать, параван 240 действует в воде как крыло или заслонка. Действие силы тяжести вытягивает параван 240 на более значительные глубины, движение в воде действует на поверхность паравана 240, а буксирные тросы тянут параван 240 в воде. Наконец, элемент 246 плавучести действует для поддержания паравана 240 на заданной глубине в воде. Вместе с тем схема геометрии паравана и прикладываемые силы должны быть сделаны такими, чтобы параван 240 оставался устойчивым в воде при буксировке и не крутился и не поворачивался вследствие крутящего момента.
Для сохранения глубины и устойчивости элемент 246 плавучести может включать в себя датчик 241 глубины, контроллер 245 и камеру 247 плавучести. В ответ на изменение глубины за пределы заданного уровня, обнаруживаемое датчиком 241 глубины, контроллер 245 может регулировать плавучесть камеры 247 для изменения глубины погружения паравана. Например, контроллер 245 может управлять действием клапана или насоса 243 и может наполнять водой камеру 247, заполненную воздухом, или удалять воду из нее.
На фиг. 19С в сейсмической группе 11В второй формы использованы многочисленные управляемые аппараты 80/85 и буксируемые косы 60 с датчиками 70. Для достижения управления в трех измерениях каждый из передних аппаратов 85 индивидуально буксирует буксируемую косу 60. Буксирные тросы и кабели 65 буксируемых кос соединяют передние аппараты 85 с судном 30. Положение и глубина погружения каждого аппарата 80/85 регулируются для поддержания соответствующего расположения группы буксируемых кос 60 при сейсморазведке. Кроме того, регулируемая глубина позволяет избегать столкновения буксируемых кос 60 с любыми обломками ледяного поля на поверхности. В общем случае в зависимости от реализации каждый аппарат 80/85 может автономным подводным аппаратом, дистанционно управляемым аппаратом, дистанционно управляемым буксируемым аппаратом или некоторым другим подходящим аппаратом. Если передние аппараты 85 являются сугубо автономными подводными аппаратами, их можно прикреплять к судну 30 буксирными тросами или фалами.
Будучи независимыми друг от друга, аппараты 85 также облегчают выпуск и выбор буксируемых кос 60 во время работы. Например, индивидуальный аппарат 85 может направить свою буксируемую косу 60 вниз, под другие буксируемые косы 60, и может вывести ее через середину группы буксируемых кос 60 на потенциально чистую площадь Z. После этого аппарат 85 может подтянуть буксируемую косу 60 к судну 30 и исключить столкновение с другими буксируемыми косами 60 и буксирными тросами и кабелями 62/65. Это позволяет операторам выпускать и выбирать буксируемые косы 60 индивидуально и даже может позволить ремонтировать буксируемую косу 60 в то время, когда все другие буксируемые косы 60 остаются в воде. Кроме того, использование аппаратов 85 выгодно в покрытых льдом водах, поскольку аппараты 85 позволяют меньше натягивать буксирные тросы 62, чем это обычно делается, а меньшее натяжение тросов 62 в покрытых льдом водах позволяет лучше справляться с потенциальными соударениями со льдом во время работы.
На фиг. 19D и 19Е показаны сейсмические группы 11С и 11D дополнительных форм, в которых использованы расходящиеся компоновки буксируемых кос 60. На фиг. 19D траверса 89 развернута под водой от скега 90 в теневой зоне судна 30, а несколько буксируемых кос 60 соединены с траверсой 89 с использованием подходящих соединительных элементов. В таком случае эти буксируемые косы 60 расходятся наружу от траверсы 89 за счет использования одного или нескольких управляемых стабилизаторов или крыльев 87, расположенных на протяжении их длины.
На фиг. 19Е каждая из буксируемых кос 60 выпущена индивидуально от скега 50, так что они выпущены под воду и в теневую зону судна 30. Как и раньше, эти буксируемые косы 60 могут расходиться наружу от скега 50 за счет использования одного или нескольких управляемых стабилизаторов или крыльев 87, расположенных на протяжении их длины.
Для справки на фиг. 9Е показан перспективный вид управляемого стабилизатора 87а, который может использоваться для направления буксируемой косы 60 (то есть регулирования поперечного положения буксируемой косы 60). В дополнение к этому на фиг. 9F показан вид сбоку управляемого крыла 87b, которое может использоваться для регулирования глубины погружения (то есть вертикального положения) буксируемой косы 60. Подробности относительно таких устройств, имеющих стабилизаторы или крылья, выпускаемых на кабеле для регулирования поперечного или вертикального положения буксируемой косы, можно найти в патентах США №№6525992, 7092315, 7206254 и 7423929, которые все включены в эту заявку путем ссылки.
Например, этими управляемыми стабилизаторами или крыльями 87 для систем из фиг. 19D-19E могут быть устройства DIGIFIN™ для направления буксируемых кос, которые можно получить от ION Geophysical, чтобы направлять буксируемые косы. Они также могут быть устройствами DIGIBIRD™ для направления буксируемых кос, которые можно получить от ION Geophysical, чтобы управлять глубиной погружения буксируемых кос. (DIGIBIRD является зарегистрированным товарным знаком ION Geophysical Corporation).
Управление стабилизаторами или ребрами 87 и определение местоположений датчиков 70 можно выполнять, используя управляющую систему 40 и соответствующее программное обеспечение. Также можно использовать другие устройства, включая устройства с прикрепленным к буксируемой косе датчиком с магнитным компасом, которые можно получить от ION Geophysical, чтобы получать информацию о компасном курсе и результаты измерения глубины и осуществлять управление. Кроме того, с помощью управляющей системы 40 и соответствующего программного обеспечения можно управлять различными стабилизаторами и крыльями 87, чтобы уклоняться от плавучих ледяных гор и крупных обломков льда, которые могут оказываться на поверхности на пути группы буксируемых кос 60 и потенциально имеют глубину погружения, достаточную для повреждения погруженных буксируемых кос 60.
Хотя в компоновках из фиг. 19А-19Е показан один скег 50, для выпуска буксируемых кос 60 на судне 30 можно использовать несколько скегов 50. Использование нескольких скегов 50 может помочь при выпуске и выборе буксируемых кос 60 за счет разделения их в соответствии с расположением.
Хотя в компоновках из фиг. 19В-19D и других показан единственный источник, можно использовать несколько источников. Например, на фиг. 19Е один источник 90А, буксируемый позади судна 30, показан на обычном месте. В дополнение к этому еще один источник 90В буксируется позади группы расходящихся буксируемых кос 60. Этот второй источник 90В можно использовать для получения обратных отсчетов с буксируемых кос 60, которые могут быть полезными при регистрации и анализе данных.
Н. Система управления и определения местоположения
В системах из фиг. 19А-19Е и системах, раскрытых в других местах этой заявки, используется управляющая система 40, в которой при морской сейсморазведке могут использоваться обычные элементы. Например, управляющая система 40 может управлять буксируемыми косами 60 в поперечном направлении с использованием технологии управления буксируемыми косами, имеющейся в настоящее время, предназначенной для обычной морской сейсморазведки в водах без льда. В случае покрытых льдом районов управляющую систему 40 можно объединять с дополнительными элементами для обработки информации, относящейся к покрытым льдом водам. Например, информацию с управляющей системы 40 можно объединять с информацией из изображения спутниковых данных, морских навигационных карт, метеорологических сводок и другой информацией для прогнозирования толщины льда в районе разведки и для нахождения разводий во льду на заданных площадях.
Спутниковые изображения могут быть связаны ограничениями, а обломки ледяного поля и местоположения плавучих ледяных гор, глыб и других препятствий могут меняться с течением времени. Вследствие этого полезно отслеживать положение конкретных препятствий и определять, как они перемещаются и как их перемещения могут мешать проводимой разведке. В соответствии с этим для управляющей системы 40 можно также использовать отдельные датчики положения, которые размещают на плавучих ледяных горах и других плавающих препятствиях, которые могут представлять опасность группе буксируемых кос во время сейсморазведки.
Как показано для примера на фиг. 19Е, датчики 42 положения могут быть выполнены с питанием от аккумуляторной батареи и могут иметь GPS-приемник 44 и связной интерфейс 46. Датчик 42 положения, расположенный на препятствии, может передавать информацию о своем местоположении. Например, когда ледокольное судно (непоказанное) вскрывает ледовый покров перед разведочным судном 30, операторы могут размещать эти отдельные датчики 42 положения на особенно крупных или глубоко погруженных ледяных глыбах или горах. После этого при использовании соответствующих линий связи с отдельными датчиками 42 положения управляющая система 40 может отслеживать перемещения препятствия.
Его перемещение можно отслеживать без промедления, чтобы определять момент, когда оно столкнется с группой буксируемых кос 60, в данный момент буксируемых сейсмическим судном 30. Если дело обстоит так, буксируемые косы 60 могут быть направлены на большую глубину для защиты. В дополнение к этому перемещение препятствий можно отслеживать с течением времени, чтобы для управляющего устройства 40 могло быть известно местоположение препятствий, когда при картировании буксирующие косы 60 буксируются в обратном направлении на протяжении площади. В зависимости от возможности перемещения препятствия на предполагаемый путь разведки операторы могут изменить курс сейсмического судна 30 чтобы обойти известное место нахождения препятствия.
1. Система с использованием управляемых выпускаемых устройств
Как отмечалось ранее, управляемые выпускаемые устройства 80 можно использовать на задних концах буксируемых кос 60 для регулирования положения буксируемых кос 60. Как также отмечалось ранее, устройства 80 могут включать в себя дистанционно управляемые буксируемые аппараты, в которых отсутствует двигательная система, но имеются управляемые стабилизаторы. На фиг. 20А показан вид сбоку морской сейсморазведочной системы 12А, имеющей дистанционно управляемый буксируемый аппарат 400 в качестве управляемого устройства на заднем конце буксируемой косы 60. Дистанционно управляемый буксируемый аппарат 400 буксируется на конце буксируемой косы 60 ниже поверхности воды. Этот дистанционно управляемый буксируемый аппарат 400 также имеет GPS-приемник 412, который может получать GPS-отсчеты после приведения дистанционно управляемого буксируемого аппарата 400 на поверхность.
На фиг. 20В показан вид в плане еще одной морской сейсморазведочной системы 12В, имеющей дистанционно управляемые буксируемые аппараты 400 в нескольких местах на буксируемых косах 60. В этой системе передние дистанционно управляемые буксируемые аппараты 400А буксируются в головных частях буксируемых кос 60, а задние дистанционно управляемые буксируемые аппараты 400В буксируются на концах буксируемых кос 60. Передние дистанционно управляемые буксируемые аппараты 400А соединены со скегом 50 судна буксирными тросами 62 и кабелями 65 буксирующих кос. При желании такие же промежуточные дистанционно управляемые буксируемые аппараты (непоказанные) могут быть выпущены на промежуточные места вдоль буксируемых кос 60.
Для выполнения работы в трех измерениях (или же в двух измерениях, или в четырех измерениях) каждый из передних дистанционно управляемых буксируемых аппаратов 400А индивидуально буксирует буксируемую косу 60. Буксирные тросы и кабели 62/65 буксируемых кос соединяют дистанционно управляемые буксируемые аппараты 400А со скегом 50 судна. Во время разведки положение и глубину погружения дистанционно управляемых буксируемых аппаратов 400А-В можно регулировать, чтобы поддерживать соответствующее расположение группы буксируемых кос 60 при сейсморазведке. Кроме того, регулируемая глубина погружения позволяет предотвращать столкновение буксируемых кос 60 с любыми обломками ледяного поля на поверхности.
Использование дистанционно управляемых буксируемых аппаратов 400А-В на передних и задних местах вдоль буксируемых кос 60 может облегчить выпуск и выбор буксируемых кос 60. Например, будучи независимыми друг от друга, индивидуальные дистанционно управляемые буксируемые аппараты 400А-В могут направлять свои буксируемые косы 60 вниз, под другие буксируемые косы 60, и могут выводить их через середину группы буксируемых кос 60 на потенциально чистую площадь позади судна 30. После этого буксируемая коса 60 может быть подтянута к судну 30 и исключено столкновение с другими буксируемыми косами 60 и буксирными тросами 62. Это позволяет операторам выпускать и выбирать буксируемые косы 60 индивидуально и даже может позволить ремонтировать буксируемую косу 60 в то время, когда все другие буксируемые косы 60 остаются в воде. Использование единственного дистанционно управляемого буксируемого аппарата 400 на конце буксируемой косы 60, как в системе из фиг. 20А, также допускает использование такой же формы выпуска и выбора.
2. Подробное описание дистанционно управляемого буксируемого аппарата
На фиг. 21А-21В показано более подробно одно осуществление дистанционно управляемого буксируемого аппарата 400. В общем случае этот дистанционно управляемый буксируемый аппарат 400 представляет собой устройство гибридного типа, включающее в себя элементы дистанционно управляемых аппаратов, автономных подводных аппаратов и глиссеров. Одним подходящим примером дистанционно управляемого буксируемого аппарата 400 является буксируемый ондулятор TRIAXUS, который можно получить от MacArtney Underwater Technology Group.
Для буксировки дистанционно управляемого буксируемого аппарата 400 буксирный кабель (непоказанный), имеющий силовые проводники и линии связи, присоединяют к передней кромке 429 центрального крыла 427. Как показано, дистанционно управляемый буксируемый аппарат 400 имеет четыре трубчатых элемента 410, соединенных в головной части крыльями 420/425 и в задней части щитками 430. Крылья 420/425 и щитки 430 имеют профиль крыла. Центральные крылья 425 связывают передние крылья 420 и поддерживают горизонтальное крыло 427 на передней стороне дистанционно управляемого буксируемого аппарата 400. Эти центральные крылья 425 способствуют поддержанию дистанционно управляемого буксируемого аппарата 400 выровненным по крену. Задние щитки 430 являются управляемыми, при этом верхний и нижний щитки 430А-В регулируют угол тангажа и правый и левый щитки 430C-D регулируют отклонение от курса.
Четыре привода или электродвигателя (непоказанных), установленных в трубчатых элементах 410 перемещают эти щитки 430A-D для регулирования угла тангажа и отклонения от курса дистанционно управляемого буксируемого аппарата 400 при его буксировке. Трубчатые элементы 410 имеют отсеки 412 для размещения различных компонентов помимо электродвигателей, зубчатых передач и датчиков положения для щитков 430A-D. Например, эти отсеки 412 могут иметь GPS-приемник, инерциальную навигационную систему, датчик глубины, датчик тангажа, датчик крена, датчик курса и т.д., рассматриваемые ниже.
При буксировке горизонтальные щитки 430А-В создают направленные вверх и вниз силы для перемещения дистанционно управляемого буксируемого аппарата 400 по вертикали, тогда как вертикальные щитки 430C-D создают приложенные к правому и левому бортам силы для перемещения дистанционно управляемого буксируемого аппарата 400 по горизонтали (в поперечном направлении). Обычно дистанционно управляемый буксируемый аппарат 400 буксируют в нейтральном положении, при этом щитки 430 периодически регулируют для поддержания дистанционно управляемого буксируемого аппарата 400 в том состоянии, в котором он находится. В некоторых ситуациях, таких как подъем на поверхность, требуется более энергичное перемещение щитков, особенно при соединении с буксируемой косой. Для торможения дистанционно управляемого буксируемого аппарата 400 можно использовать некоторые из способов, рассмотренных ранее. В дополнение к этому или как вариант щитки 430 можно поворачивать внутрь или наружу для повышения лобового сопротивления дистанционно управляемого буксируемого аппарата 400 при буксировке.
3. Управляющая система для дистанционно управляемого буксируемого аппарата, навигационной инерциальной системы и глобальной системы позиционирования
На фиг. 22 схематично показаны элементы управляющей системы 500, предназначенной для управления управляемыми аппаратами (например, дистанционно управляемыми буксируемыми аппаратами 400) и определения их местоположений при буксировке в морской сейсмической системе настоящего раскрытия. Как отмечалось ранее, основная управляющая система 510 на буксирующем судне имеет основной GPS-приемник 520 для получения GPS-отсчетов. Как и ранее, эта управляющая система 510 может быть системой управления контрольно-измерительной аппаратурой, такой как Orca®, которую можно получить от ION Geophysical. Управляющая система 510 сопряжена с (или объединена с) блоком 530 управления, который управляет различными аппаратами (например, дистанционно управляемыми буксируемыми аппаратами (ДУБА)), используемыми для буксируемых кос в группе, и осуществляет мониторинг аппаратов. Примером блока 530 управления, подходящего для дистанционно управляемого буксируемого аппарата 400 из фиг. 21А-21В является верхний блок, используемый для дистанционно управляемого буксируемого аппарата TRIAXUS.
Присоединенными линиями 532 связи и энергоснабжения блок 530 управления сопряжен с локальным контроллером 550 на управляемом аппарате 540, которым может быть дистанционно управляемый буксируемый аппарат 400 из фиг. 21А-21В. Контроллер 550 передает данные датчиков с датчиков 560 устройства на блок 530 управления. После сопряжения с навигационной информацией в основной управляющей системе 510 блок 530 управления посылает навигационные указания обратно на контроллер 550, который соответствующим образом приводит в действие различные электродвигатели 570 стабилизаторов. Проводка управляемого аппарата 540 может включать в себя управление в реальном времени и заранее запрограммированные траектории.
Контроллер 550 находится в связи со встроенными датчиками 560 устройства и электродвигателями 570 для щитков. Встроенные датчики 560 для управляемого устройства 540 включают в себя датчик глубины, датчик тангажа, датчик крена и датчик курса. Глубина может измеряться датчиком давления, тогда как тангаж и крен могут измеряться двухосными инклинометрами. Рыскание или курс можно измерять, используя магнитный индукционный компас, а также можно использовать альтиметр.
В дополнение к соединению со встроенными датчиками 560 контроллер 550 можно соединять с датчиками положения, которые осуществляют мониторинг электродвигателей и щитков для отслеживания положений этих щитков, чтобы передавать данные по каналу обратной связи на блок 530 управления. Все эти встроенные датчики (то есть тангажа, крена, курса и положения вала электродвигателя) формируют сигнал обратной связи для управляющей системы 510, чтобы управлять щитками для направления управляемого аппарата 540 и удержания его от крена.
В дополнение к этим датчикам контроллер 550 на управляемом аппарате 540 находится в связи с GPS-приемником 580. Как отмечалось ранее, когда управляемый аппарат 540 приводится к поверхности, антенна GPS-приемника 580 может выставляться над поверхностью воды для получения GPS-отсчетов. Кроме того, желательно делать такие отсчеты периодически. Есть основания полагать, что при использовании в покрытых льдом и с затрудненной проходимостью водах управляемый аппарат 540 можно буксировать под обломками ледяного поля непрерывно в течение нескольких часов или даже дней до того, как он сможет всплыть для получения GPS-отсчетов. Поэтому управляемый аппарат 540 также имеет устройство 590 инерциальной навигационной системы (ИНС), используемое для определения местоположения управляемого аппарата 540 между непосредственными GPS-отсчетами GPS-приемником 580.
В общем случае в устройстве 590 инерциальной навигационной системы, можно использовать компоненты, известные в данной области техники, такие как процессор, акселерометры и гироскопы. В устройстве 590 инерциальной навигационной системы способы счисления пути используются для непрерывного определения положения, ориентации, направления и скорости управляемого аппарата 540. В зависимости от того, сколь долгое время управляемый аппарат 540 должен быть в режиме счисления пути в этом способе, погрешность вследствие ухода параметров, присущая измерениям ускорения и угловой скорости в устройстве 590 инерциальной навигационной системы, становится все более значительной. В соответствии с этим навигационные данные предпочтительно корректировать в соответствии с периодическими GPS-отсчетами. Даже при погрешности, составляющей долю морской мили (одна морская миля равна 1853,6 м) в час для положения и десятые части градуса в час для ориентации, погрешность в определении устройства 590 инерциальной навигационной системы может быть значительной, если управляемый аппарат 540 должен оставаться ниже поверхности в течение продолжительного периода времени. В приводимом ниже рассмотрении описывается контур обратной связи, который можно использовать для коррекции погрешности определения устройством 590 инерциальной навигационной системы.
4. Контур управления
На фиг. 23 показан пример навигационного контура 600 обратной связи, предназначенного для определения положения управляемого аппарата (например, 540; фиг. 22), такого как дистанционно управляемый буксируемый аппарат, и коррекции этого положения. Первоначально в контуре 600 управляемый аппарат 540 получает (блок 602) непосредственный GPS-отсчет при использовании GPS-приемника 580. Это делается в то время, когда площадь над управляемым аппаратом 540 свободна от обломков ледяного поля или других препятствии. После того как управляемый аппарат 540 еще раз погрузится, устройство 590 инерциальной навигационной системы и управляющая система 510 начинают определять (блок 604) положение управляемого аппарата 540, когда он буксируется. Чтобы сделать это, берется исходное место нахождения или место на основании GPS-отсчета и измеряются направление, скорость и время для вычисления положения управляемого аппарата 540, идущего вперед от этого исходного места нахождения, с использованием способов счисления пути.
К сожалению, инерциальная навигация этого вида не является точной и погрешность вследствие ухода параметров накапливается с течением времени. Покуда погрешность вследствие ухода параметров является достаточно низкой, эту инерциальную навигацию можно продолжать. В некоторый момент времени управляющая система 510 выполняет (блок 606) определение, не превышает ли погрешность вследствие ухода параметров некоторый приемлемый предел, который зависит от реализации. Если не превышает, управляющая система 510 может продолжать (блок 604) счисление пути до тех пор, пока погрешность вследствие ухода параметров не станет слишком большой.
Как только погрешность вследствие ухода параметров становится большой (вследствие продолжительного периода счисления пути, больших скоростей разведки, большой дальности разведки или сочетания их), управляющая система 510 будет пытаться корректировать погрешность путем всплытия управляемого аппарата 540 для получения нового GPS-отсчета, которым фиксируется положение устройства 540, или путем объединения счисления пути от устройства инерциальной навигационной системы с сигналом обратной связи от основной навигационной системы судна. В соответствии с этим управляющая система определяет (решение 608) на основании ручного ввода данных или от датчиков (гидролокатора, измерителя профиля льда, фатометра и т.д.) на управляемом аппарате 540, может ли устройство 540 подняться на поверхность, чтобы получить (блок 602) еще один GPS-отсчет для фиксации местоположения устройства с целью повторения процесса.
Если управляемый аппарат 540 не может подняться на поверхность, то управляющая система 510 получает (блок 610) GPS-отсчет с использованием бортового GPS-приемника 580 судна. Этот GPS-отсчет дает местоположение буксирующего судна. В качестве дополнительного приложения система 510 получает (блок 612) данные от различных подводных устройств (то есть управляемого аппарата 540, буксируемой косы, датчиков и т.д.). Эти данные могут использоваться для определения относительного положения управляемого аппарата 540.
Например, на фиг. 24 показана система 620А, имеющая буксируемую косу 60 с датчиками 70, расположенными на ней, для определения формы буксируемой косы с использованием GPS-отсчета (x) для судна 30, известных местоположений (Y1-Y5) датчиков, известного местоположения (Y6) управляемого аппарата в направлении буксируемой косы 60 и различных компасных курсов. Как показано, данные с датчиков 70 и управляемого аппарата 540 на буксируемой косе 60 (включая каждое из их положений (Y) на буксируемой косе 60, компасные курсы с поправкой на магнитное склонение и т.п.) могут использоваться для оценивания местоположения точек на буксируемой косе 60 и получения формы буксируемой косы. Объединенные с GPS-отсчетом (X) судна при использовании бортового GPS-приемника все эти данные могут быть объединены с данными о положении от устройства инерциальной навигационной системы (590; фиг. 23) для коррекции погрешности вследствие ухода параметров.
Как вариант акустические способы позиционирования можно применять, наряду с GPS-отсчетом с использованием бортового GPS-приемника 580, для коррекции погрешности вследствие ухода параметров устройства инерциальной навигационной системы. Например, в системах 620В-С из фиг. 25 показаны различные компоновки акустических систем, предназначенных для осуществления акустической поперечной связи, которую можно использовать для определения положений буксируемой косы. В дополнение к этому, как показано в системе 620D из фиг. 26, короткая базовая линия может быть получена при использовании преобразователя Т1 на судне 30, чтобы излучать ультразвуковой импульс к датчику 541 на управляемом аппарате 540 на заднем конце буксируемой косы 60 для определения его положения. Кроме того, длинная базовая линия может быть получена при использовании одного или нескольких других преобразователей Т2 на морском дне (минимум два преобразователя необходимы для системы с длинной базовой линией), чтобы излучать ультразвуковой импульс к датчику 541 на управляемом аппарате 540 для определения его положения. Наконец, контрольные отсчеты датчиков от управляемого аппарата 540 и указания относительно перемещений, направляемые на управляемый аппарат 540 блоком управления, могут быть объединены с GPS-отсчетом (X) на борту для определения положения управляемого аппарата 540. Можно использовать эти и другие способы, имеющиеся в данной области техники.
Независимо от способа объединения положения устройства инерциальной навигационной системы с сигналом обратной связи от других навигационных компонентов управляющая система 510 корректирует определяемое счислением пути положение управляемого аппарата (см. блок 614 на фиг. 23), так что в системе может продолжаться использование устройства 590 инерциальной навигационной системы с меньшей погрешностью вследствие ухода параметров. Взятый в целом процесс счисления пути и коррекции погрешности вследствие ухода параметров можно продолжать до тех пор, пока управляемый аппарат 540 остается погруженным ниже поверхности. Со временем в случае, если условия позволяют это, управляемый аппарат 540 направляется на поверхность для получения (блок 602 на фиг. 23) непосредственного GPS-отсчета для фиксации его местоположения. Этим новым GPS-отсчетом обеспечивается новая исходная точка для счисления пути и коррекции в то время, когда управляемый аппарат 540 остается погруженным при дальнейшей разведке.
I. Рабочий шум в акваториях с препятствиями
При разведке в водах с препятствиями и особенно в покрытых льдом районах столкновения судна могут усложнять получаемые сейсмические данные. Еще одна морская сейсморазведочная система 650 на фиг. 27 и на этот раз, как и раньше, имеет ледовый скег 50 и горизонтальный источник 90, хотя могут использоваться другие компоненты, раскрытые в этой заявке. В этой системе 650 события регистрируются, когда ледокольное судно 20 идет во время разведки и разрушает паковый лед и расталкивает обломки ледяного поля. В таком случае при обработке результирующих данных, получаемых датчиками 70, можно использовать регистрируемые события, которые включают в себя разрушение льда и соударения. Короче говоря, система 650 имеет сейсмический регистратор 750, который может включать в себя обычную аппаратуру для регистрации морских сейсмических данных, получаемых датчиками 70 на буксируемых косах 60. Кроме того, система 650 имеет регистратор 760 соударений со льдом на корпусе ледокольного судна 20, хотя его также можно поместить на буксирующее судно 30.
Работа системы 650 из фиг. 27 будет рассмотрена при одновременном обращении к фиг. 28. При использовании система 650 получает сейсмические данные из покрытого льдом района и принимает во внимание события, связанные с соударением со льдом, которые могут происходить при буксировке буксируемых кос 60. Как обычно, операторы осуществляют буксировку (блок 702; фиг. 28) буксируемых кос 60, имеющих датчики 70, посредством буксирующего судна 30. Перед буксирующим судном 30 ледокольное судно 20 может разрушать паковый лед и отклонять в сторону обломки ледяного поля, чтобы проложить дорогу для прохода буксирующего судна 30. Как вариант буксирующее судно 30 может использоваться само по себе и может само разрушать и отводить лед в сторону. В любом случае регистратор 760 соударений со льдом обнаруживает (блок 704) события, связанные с соударением со льдом, в то время, когда буксируемые косы 60 буксируются. При этом регистратор 760 соударений со льдом регистрирует (блок 706) информацию об обнаруживаемых событиях для последующего анализа. Этот процесс повторяется в продолжение операции буксировки.
Как схематично показано на фиг. 29, сейсмический регистратор 750 имеет датчики 70, расположенные на всем протяжении буксируемых кос, GPS-устройство 754 и регистрирующее устройство 756. Когда регистрирующее устройство 756 регистрирует сейсмические данные, оно также получает информацию о местоположении и времени с GPS-устройства 754 и регистрирует эту информацию в качестве части сейсмической записи. Для регистрации и сохранения сейсмических данных можно использовать обычные способы, известные в данной области техники. В результате сейсмический регистратор 750 может быть соединен с управляющей системой 40, такой как компьютерная система или аналогичная, которая может обрабатывать и анализировать сейсмическую запись.
Как схематично показано на фиг. 30, регистратор 760 соударений со льдом имеет датчик 762, GPS-устройство 764 и регистрирующее устройство 766. В качестве датчика 762 можно использовать один или несколько акселерометров, инерциальных датчиков, геофонов или тому подобных, которые могут по меньшей мере обнаруживать повторяемость и длительность соударений корпуса судна и льда. В соответствии с этим датчик 762 акустически связан с корпусом судна или установлен на нем. С учетом их роли GPS-устройство 764 и регистрирующее устройство 766 могут быть обычными компонентами. При регистрации связанных с соударениями событий регистрирующее устройство 766 регистрирует поток данных или дискретные точки данных. Например, как показано в репрезентативной таблице 765 из фиг. 31, регистратор 760 соударения может регистрировать время, местоположение (то есть GPS-координаты), повторяемость и продолжительность точек данных для соударений, которые происходят во время работы. В таком случае эти данные сохраняют для последующего использования.
При разрушении сплоченного льда может создаваться высококачественный источник для сейсморазведки. Каждое событие, связанное с соударением со льдом, будет отличающимся (то есть имеющим особую сигнатуру) вследствие иной скорости судна, толщины льда и т.д. Кроме того, регистратор 760 соударений может регистрировать время удара/разрушения льда, а регистрируемые GPS-данные могут показывать время и место разрушения льда относительно каждого из сейсмических датчиков (которые также имеют известные местоположения). Таким образом, данные регистратора 760 соударений со льдом по существу характеризуют сигнатуру событий, связанных с ударами льда, что позволяет математически моделировать события при последующих анализе и обработке.
Вернемся к работе (фиг. 28), где в соответствии с установленным порядком в системе 650 (фиг. 27) одновременно работают (блок 708) воздушные пушки источника 90 и регистратор 760 соударений регистрирует все связанные с соударениями события. Например, при работе источника 90 элементы источника или пушки 91 можно возбуждать через каждые 50 м, когда буксирующее судно 30 выдерживает заданный курс. В ответ на сейсмическую энергию датчики 70 на буксируемых косах 60 обнаруживают (блок 710) результирующие сейсмические данные, а сейсмический регистратор 750 регистрирует (блок 712) получаемые сейсмические данные.
Возбуждение и регистрация повторяются в продолжение операции буксировки и могут сопровождаться выполнением операций, традиционных для морской сейсморазведки, известных и используемых в данной области техники. Короче говоря, в системе 650 может формироваться поток 770 данных, схематично показанный на фиг. 32, и как представлено позицией 772, эта система 650 может возбуждать воздушные пушки через каждые 25 с. Как правило, при обработке данных управляющая система 40 обычно обрабатывает данные только во время периода 774 прослушивания (например, 18 с) после каждого возбуждения 772. Однако сейсмический регистратор 750 обычно регистрирует все данные во время разведки. Поэтому для учета связанных с соударениями событий 776 и особенно событий за пределами обычного периода 774 прослушивания управляющая система 40 может регулировать период 774 прослушивания для учета возможных событий 776, связанных с соударением со льдом, находящихся за пределами обычного периода 774.
В конечном счете, после завершения операции буксировки управляющая система 40 обрабатывает (блок 714) результирующие данные, включая сейсмические данные, полученные буксируемыми косами 60, и данные, полученные регистратором 760 соударений со льдом. На фиг. 33 графически показана репрезентативная амплитудная характеристика 780 зарегистрированных сейсмических данных морской сейсмической системы 650. Первая показанная амплитудная характеристика 782 является результатом действия источника 90 с воздушными пушками, тогда как вторая амплитудная характеристика 784 является результатом событий, связанных с соударениями со льдом. Эти характеристики 782/784 представлены только с иллюстративными целями и предполагаются отражающими фактические получаемые данные, которые обычно имеют более сложный характер, неподходящий для представления в этой заявке. В действительности регистрируемая амплитудная характеристика 780 не имеет двух отдельных показанных репрезентативно характеристик 782/784. Вместо этого сейсмическими датчиками 70 регистрируется суммарный волновой сигнал из двух откликов. Поэтому управляющая система 40 находит обратное преобразование свертки двух амплитудных характеристик 782/784, так что сейсмическая запись может быть надлежащим образом проанализирована.
В этом месте обработки операторы могут определять, используются ли (блок 716) события, связанные с соударениями со льдом, в качестве сейсмического источника в регистрируемых сейсмических данных. Прежде всего зарегистрированные данные для событий, связанных с соударениями со льдом, привязываются к сейсмической записи, зарегистрированной датчиками 70. Поскольку зарегистрированными данными о соударениях обеспечиваются сигнатуры событий, связанных с соударениями со льдом, проявления событий как сейсмических источников в сейсмической записи можно отфильтровать из сейсмической записи, чтобы получить данные, которые относятся по существу к использованию только источника с воздушными пушками и не относятся к событиям, связанным с соударениями со льдом. Кроме того, при известности сигнатуры событий, связанных с соударениями со льдом, сейсмическую запись в действительности можно обрабатывать, используя события, связанные с соударениями со льдом, в качестве пассивного сейсмического источника, потенциально обеспечивающего дополнительную информацию для анализа и разрешающую способность для получения характеристик формации морского дна.
Если достаточно полезные, связанные с соударениями события происходят в данной области сейсмической записи, операторы могут, например, захотеть использовать события в качестве высококачественного источника для формирования сейсмических данных, чтобы получать характеристики формации. Однако, если события не являются полезными, операторы могут принять решение вычесть или удалить эту часть сейсмических данных, формируемых в результате событий, связанных с соударениями со льдом. В зависимости от обстоятельств выбор, использовать или не использовать события, связанные с соударениями со льдом, можно делать по одному или нескольким участкам представляющей интерес сейсмической записи или по всей сейсмической записи.
Например, если происходят многочисленные события, связанные с соударениями со льдом, имеющие достаточную продолжительность и повторяемость, управляющая система 40 может выделить события из сейсмических данных и фактически использовать их для создания сейсмической записи с событиями, связанными с соударениями со льдом, действующими в качестве пассивного сейсмического источника. В этом случае операторы могут принять решение использовать события, связанные с соударениями со льдом, а управляющая система 40 может математически моделировать (блок 718) события в качестве высококачественного источника. Это возможно, поскольку управляющая система 40 на основании GPS-данных и отметки времени, регистрируемой регистратором 760 соударений, может точно определять, когда и где произошло событие, связанное с соударением со льдом. Спектр каждого индивидуального события, связанного с соударением со льдом, можно моделировать и в таком случае впоследствии использовать в качестве источника в сейсмических данных. Только соударения со значительными амплитудами, повторяемостями и продолжительностями могут представлять интерес для использования в качестве высококачественных источников сейсмических данных. Характеристики событий, связанных с соударениями со льдом, могут изменяться в зависимости от многих переменных.
При условии, что для управляющей системы 40 известно, когда и где происходят события, связанные с соударениями со льдом, а также известна сигнатура связанного с соударением события (то есть повторяемость и продолжительность), управляющая система 40 может использовать связанное с соударением событие как если бы оно было источником при сейсморазведке. Затем с использованием регулярных сейсмических данных, создаваемых источником 90 с воздушными пушками, и событий, связанных с соударениями со льдом, в качестве дополнительного пассивного источника, управляющая система 40 известными способами обработки может анализировать (блок 720) сейсмические данные для определения характеристик формации.
Если операторы принимают решение не использовать события, связанные с соударениями со льдом, управляющая система 40 математически моделирует (блок 722) события и удаляет (блок 724) данные о событиях из сейсмической записи при использовании программы ослабления шума. Затем с использованием регулярных сейсмических данных, создаваемых источником 90 с воздушными пушками, при отфильтрованных событиях, связанных с соударениями со льдом, управляющая система 40 может анализировать (блок 720) сейсмические данные известными способами обработки для получения характеристик формации.
Приведенное выше описание предпочтительных и других осуществлений не предназначено для ограничения или сужения объема применимости концепций изобретения, предложенных заявителем. Идеи настоящего раскрытия можно применять при двумерной, трехмерной и четырехмерной сейсморазведке в покрытых льдом или загроможденных водах, а также в обычных условиях морской сейсморазведки. Кроме того, аспекты и способы, рассмотренные применительно к одному конкретному осуществлению, реализации или компоновке, раскрытых в этой заявке, можно использовать совместно или сочетать с аспектами и способами, рассмотренными в других конкретных осуществлениях, реализациях или компоновках, раскрытых в этой заявке. В обмен на раскрытие концепций изобретения, содержащееся в этой заявке, заявитель испрашивает патентные права, предоставляемые прилагаемой формулой изобретения. Следовательно, предполагается, что прилагаемая формула изобретения включает в себя все модификации и изменения к полному объему, которые встречаются в объеме нижеследующей формулы изобретения или эквивалентов ее.
| название | год | авторы | номер документа |
|---|---|---|---|
| МОРСКАЯ СЕЙСМОРАЗВЕДКА В ПОКРЫТЫХ ЛЬДОМ ИЛИ ИМЕЮЩИХ ПРЕПЯТСТВИЯ ВОДАХ | 2013 |
|
RU2570428C2 |
| МОРСКАЯ СЕЙСМОРАЗВЕДКА С ИСПОЛЬЗОВАНИЕМ БУКСИРУЕМЫХ КОМПОНЕНТОВ, НАХОДЯЩИХСЯ НИЖЕ ПОВЕРХНОСТИ ВОДЫ | 2015 |
|
RU2672044C2 |
| ОПЕРАЦИИ АРКТИЧЕСКОЙ СЕЙСМОРАЗВЕДКИ | 2014 |
|
RU2624835C2 |
| КОМПЕНСАЦИЯ СКЛОНЕНИЯ ПРИ СЕЙСМИЧЕСКИХ РАЗВЕДКАХ | 2012 |
|
RU2557361C2 |
| УСТРОЙСТВО ДЛЯ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ | 2016 |
|
RU2621272C1 |
| ДИНАМИЧЕСКИ УПРАВЛЯЕМЫЕ КРЫЛЬЕВЫЕ СИСТЕМЫ И СПОСОБЫ | 2016 |
|
RU2729696C2 |
| Способ управления сейсмоакустическими косами и устройство позиционирования для его осуществления | 2015 |
|
RU2607076C1 |
| Устройство для буксировки сейсмографной косы в морях с ледовым покровом | 1990 |
|
SU1744660A1 |
| ПОЛУЧЕНИЕ СЕЙСМИЧЕСКИХ ДАННЫХ В РАЙОНАХ, ПОКРЫТЫХ ЛЬДОМ | 2015 |
|
RU2680259C2 |
| КОНФИГУРАЦИЯ БУКСИРОВКИ СЕЙСМИЧЕСКИХ ИСТОЧНИКОВ С ШИРОКИМ РАЗНОСОМ | 2018 |
|
RU2747833C1 |
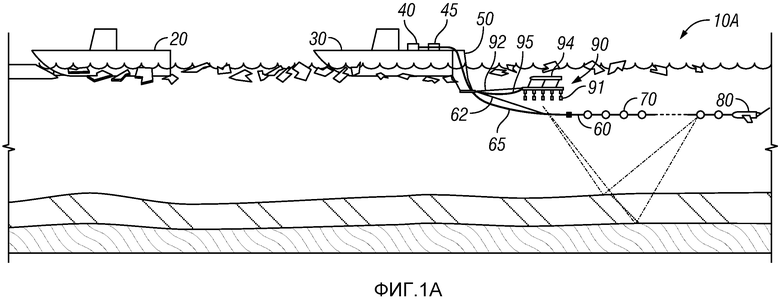
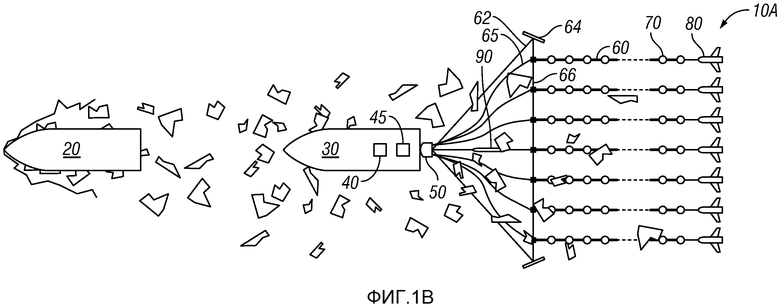
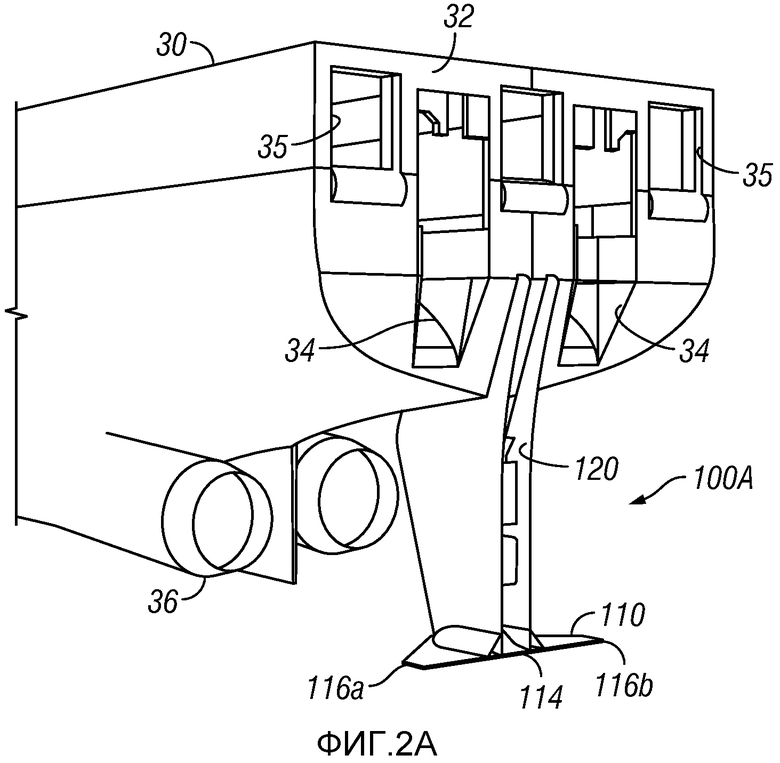

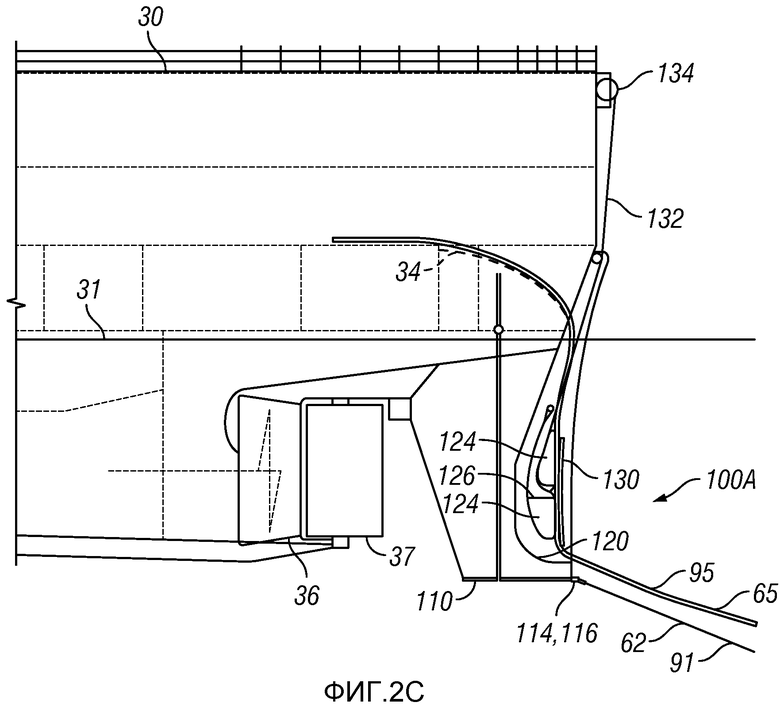
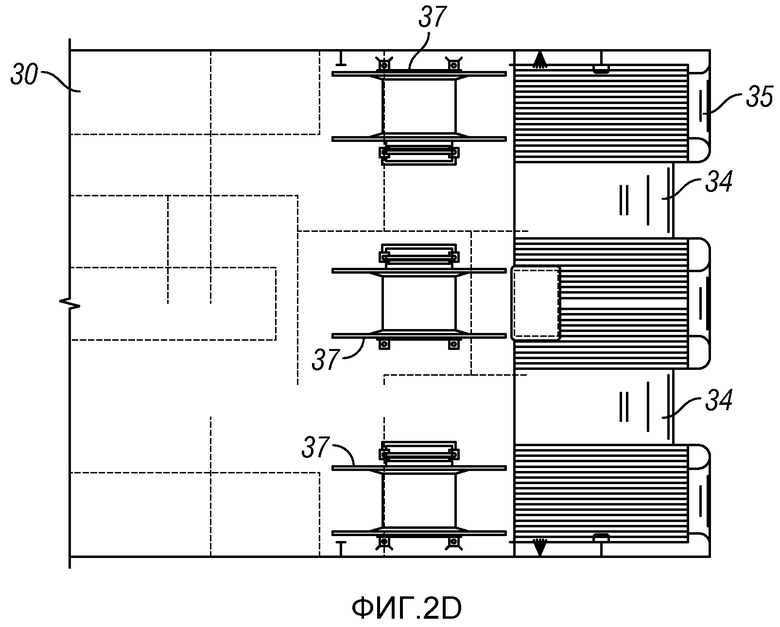
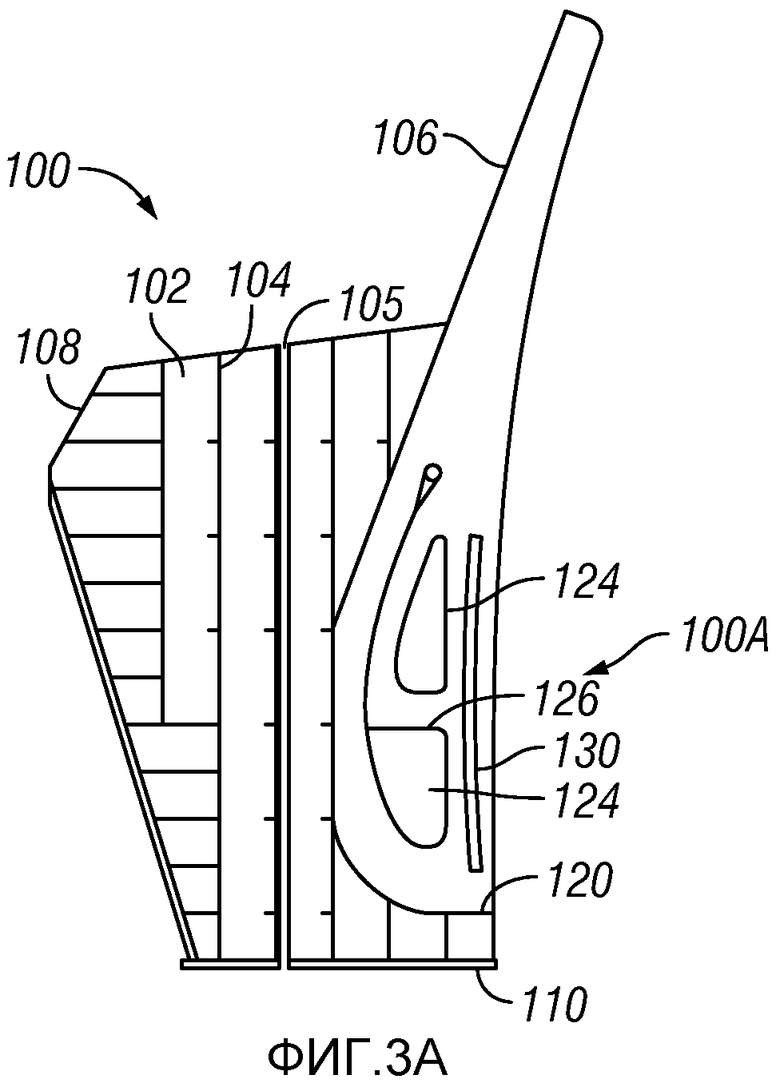

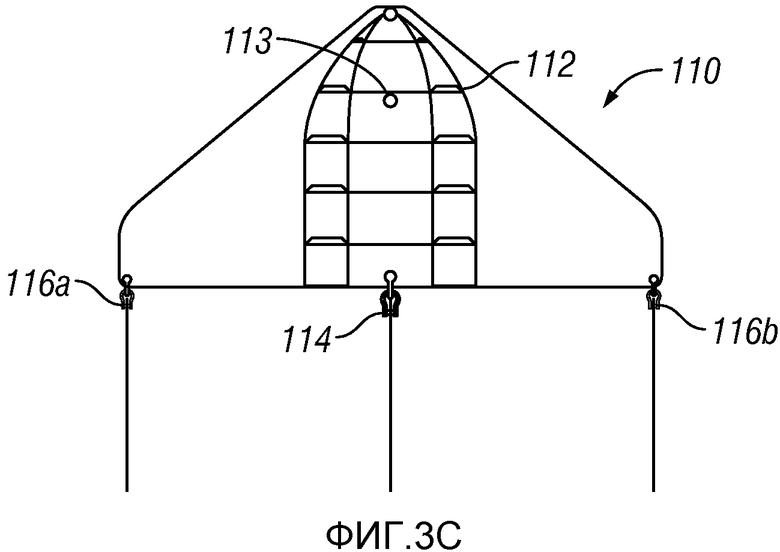
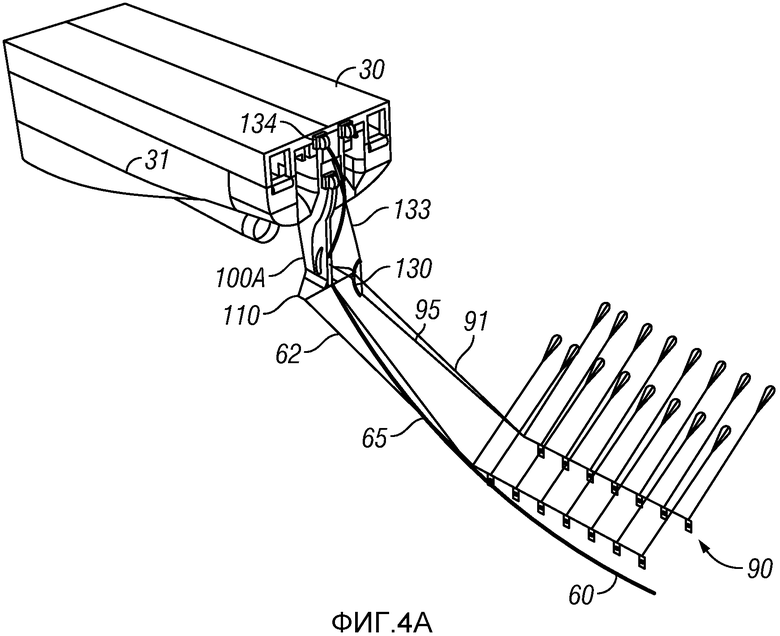
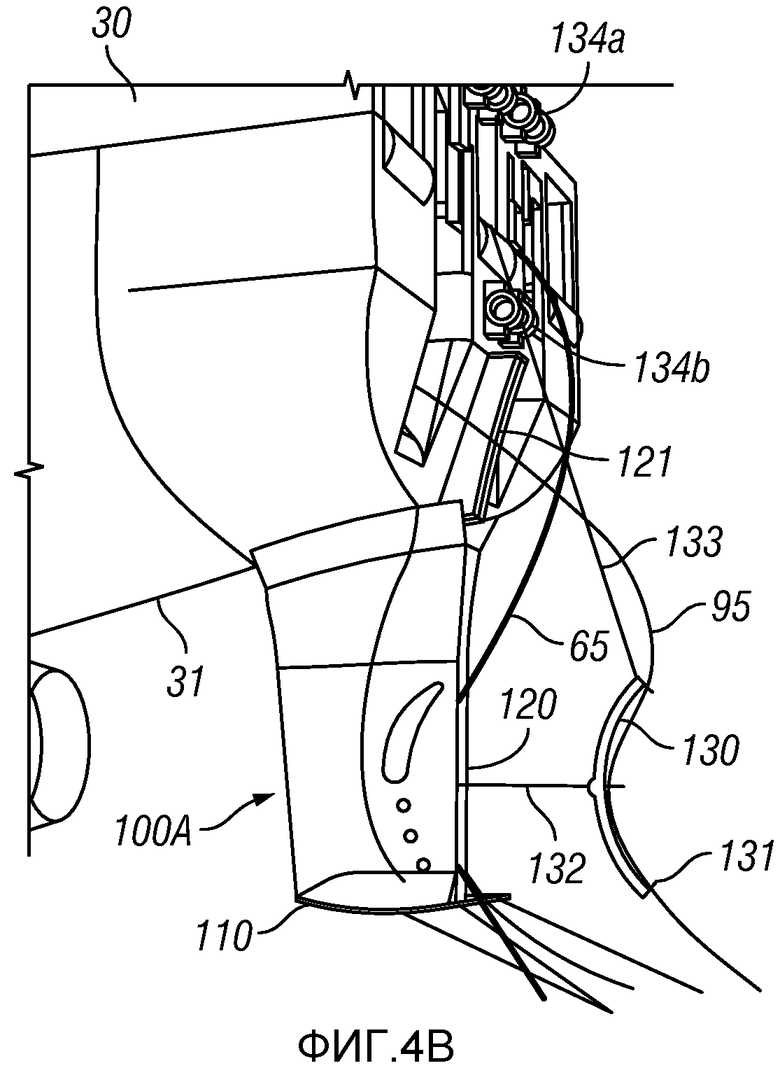

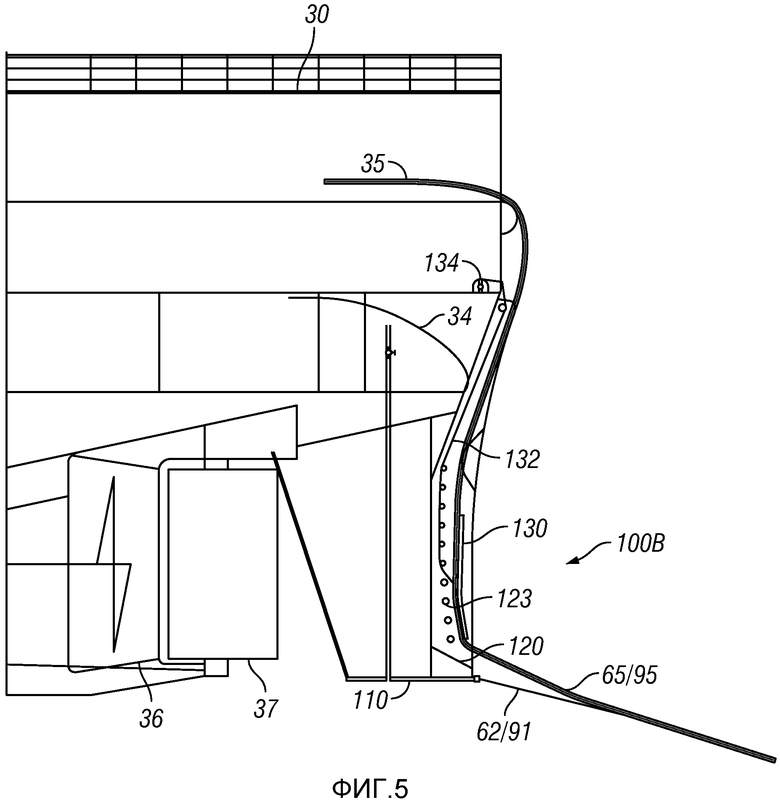
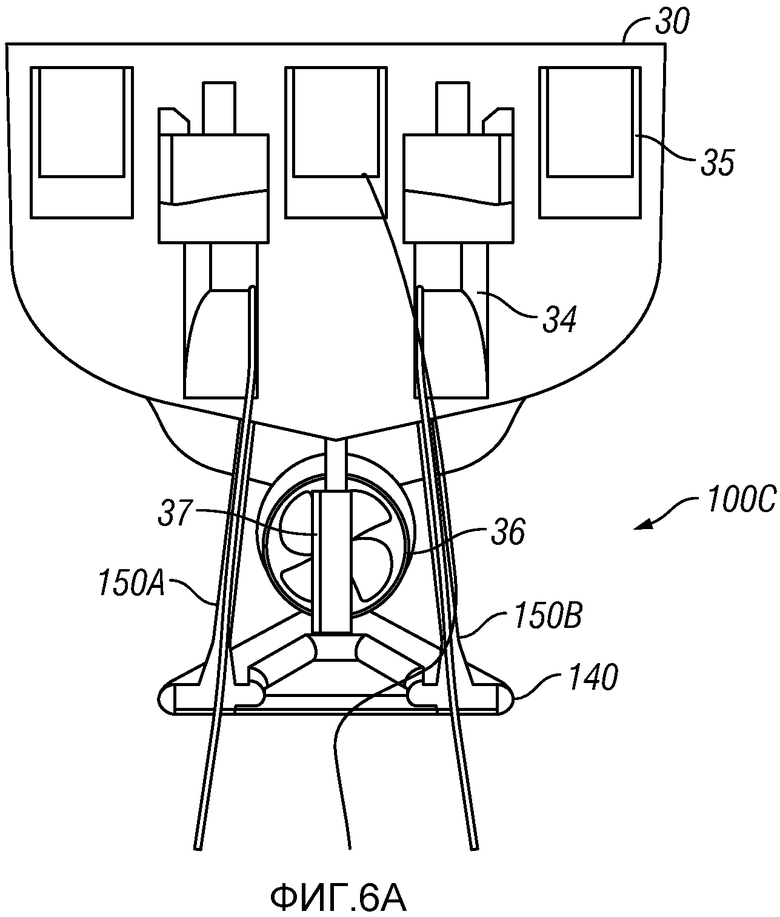
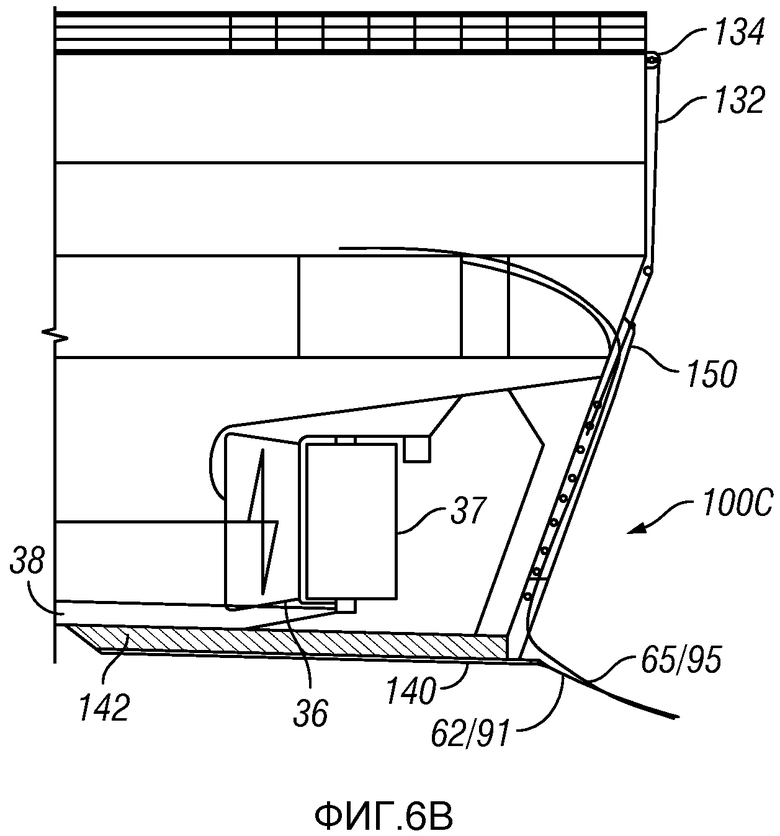
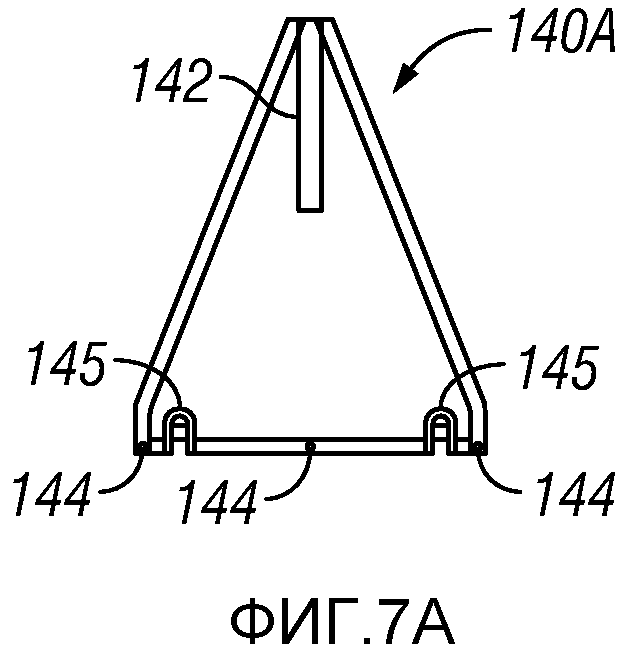
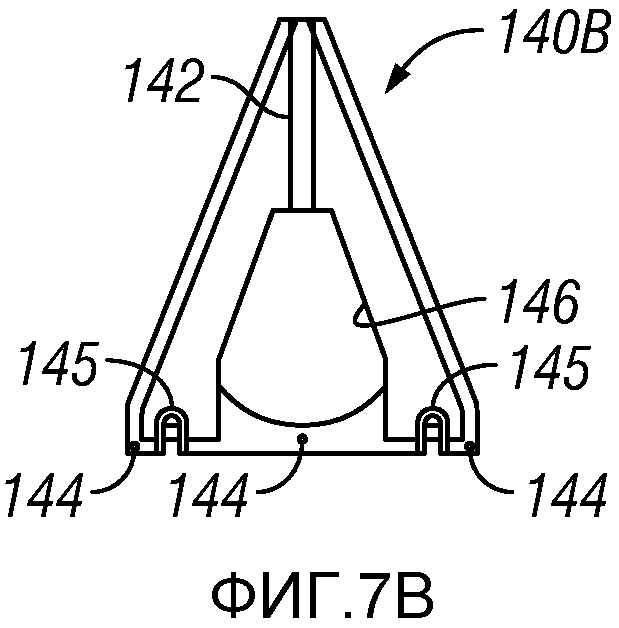

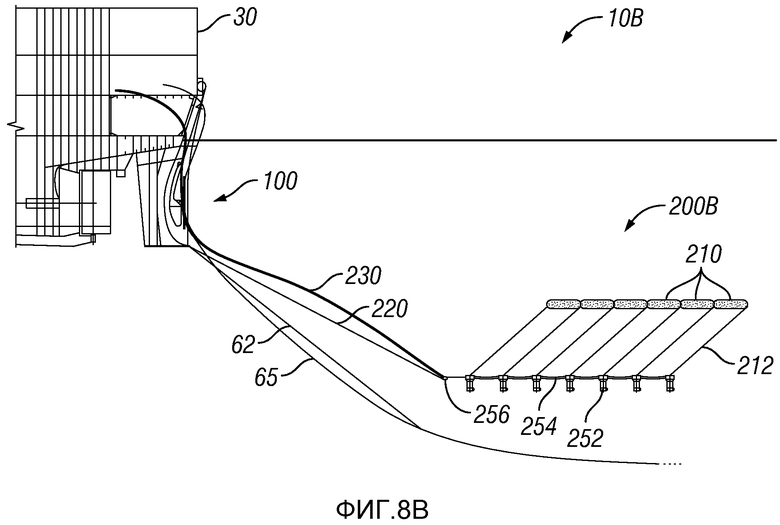
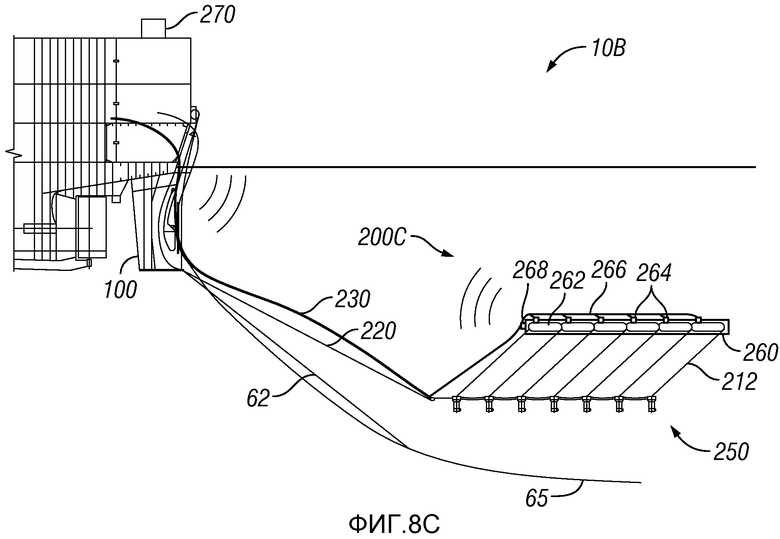

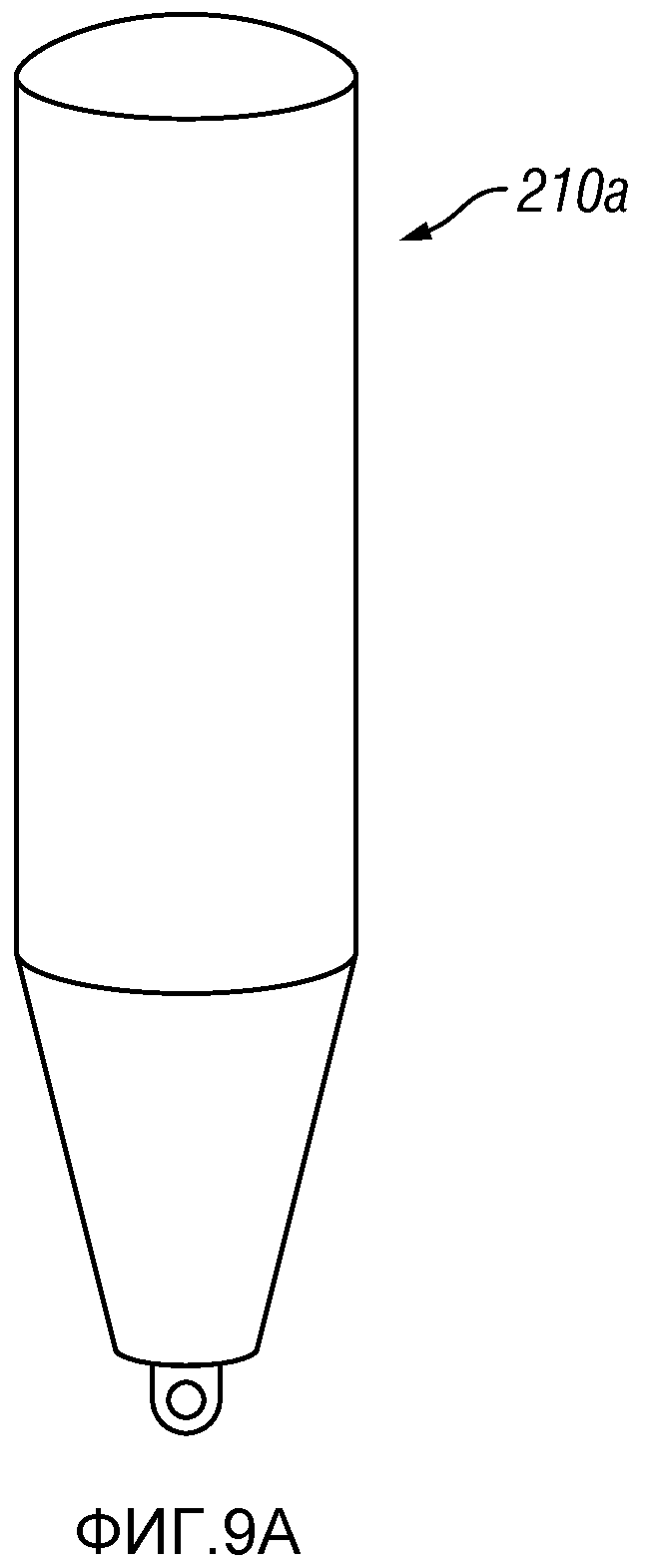
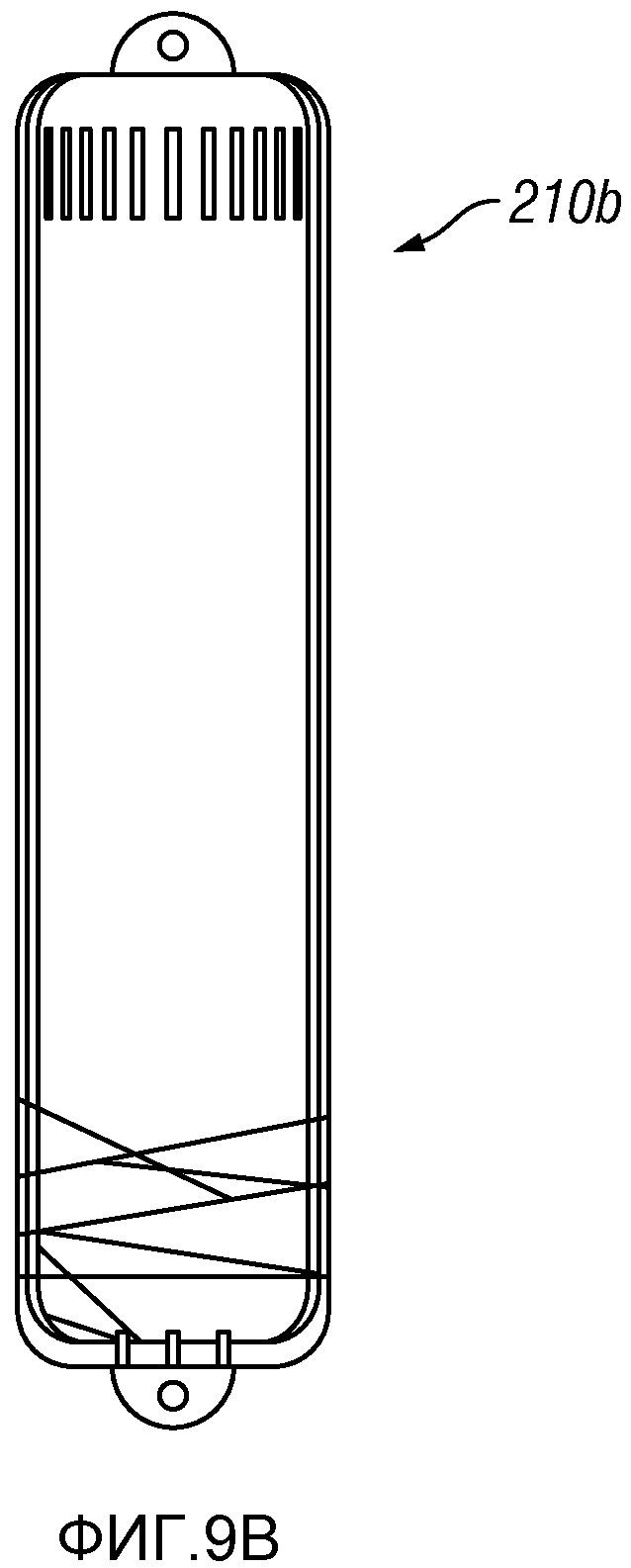
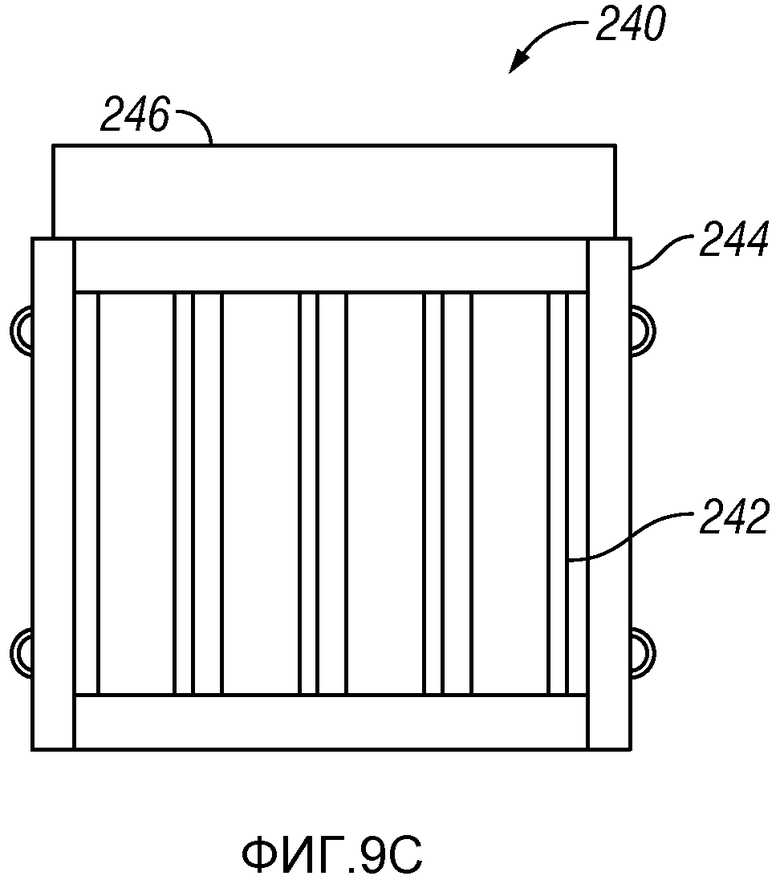
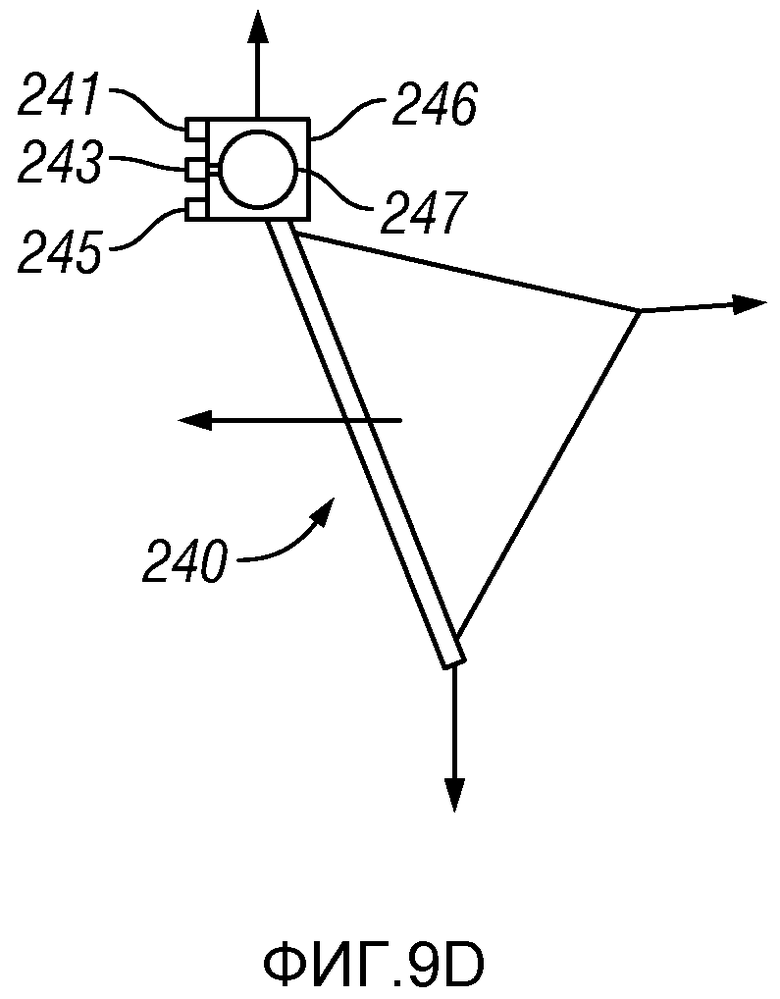
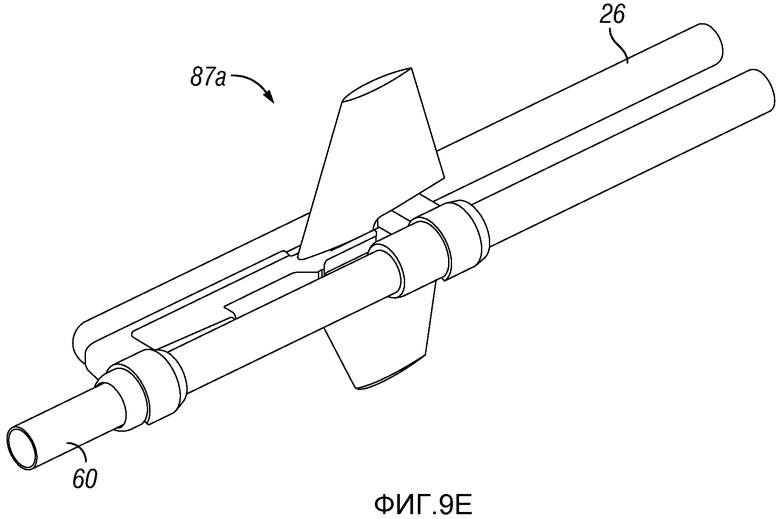
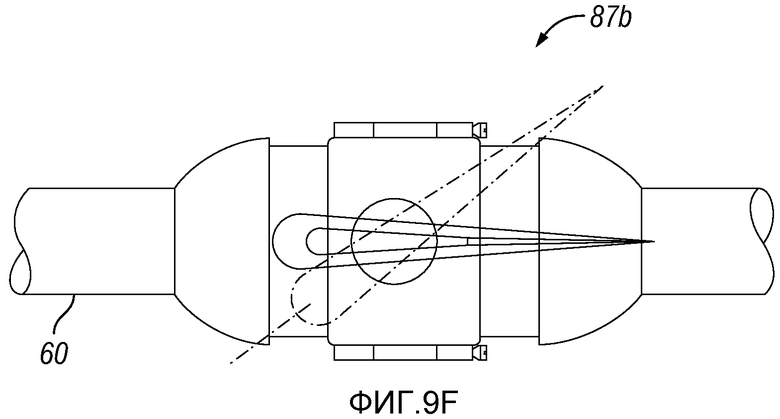
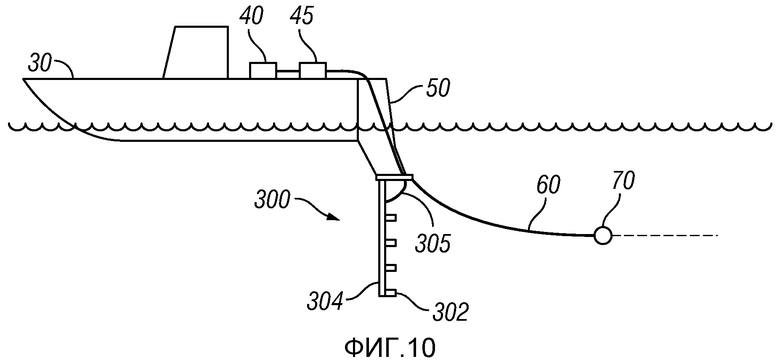
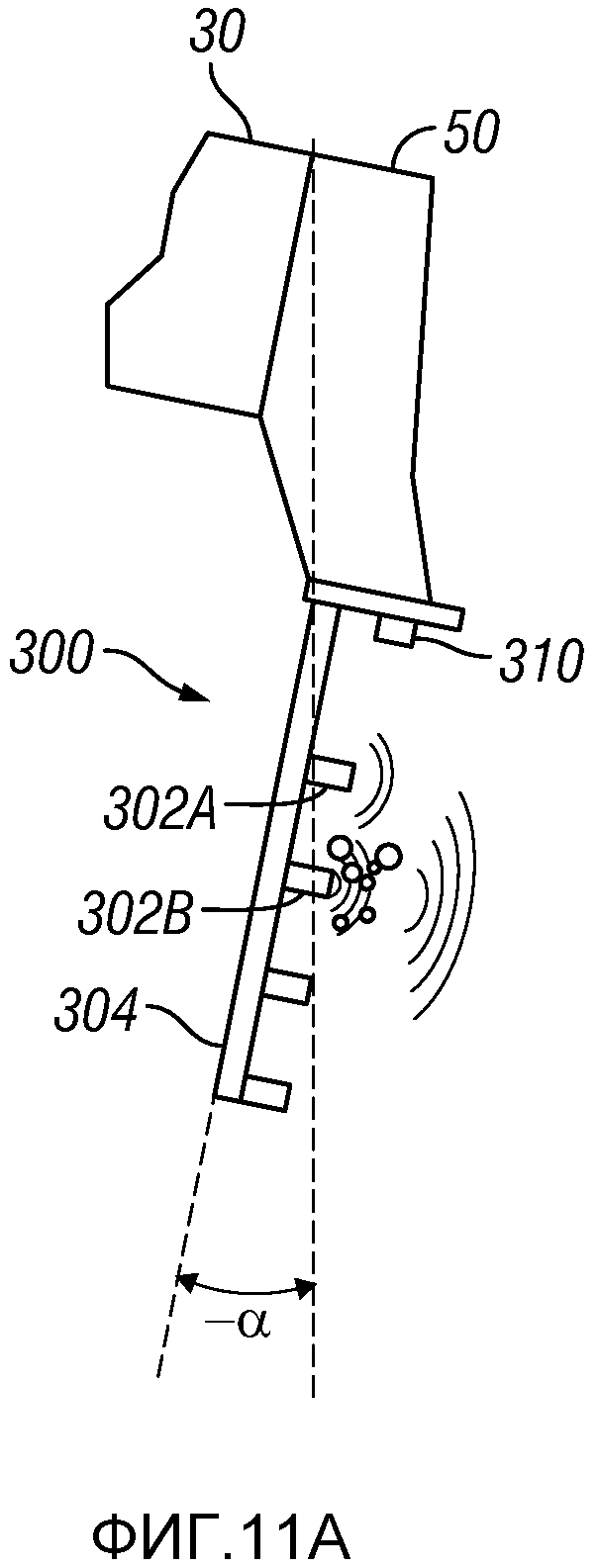

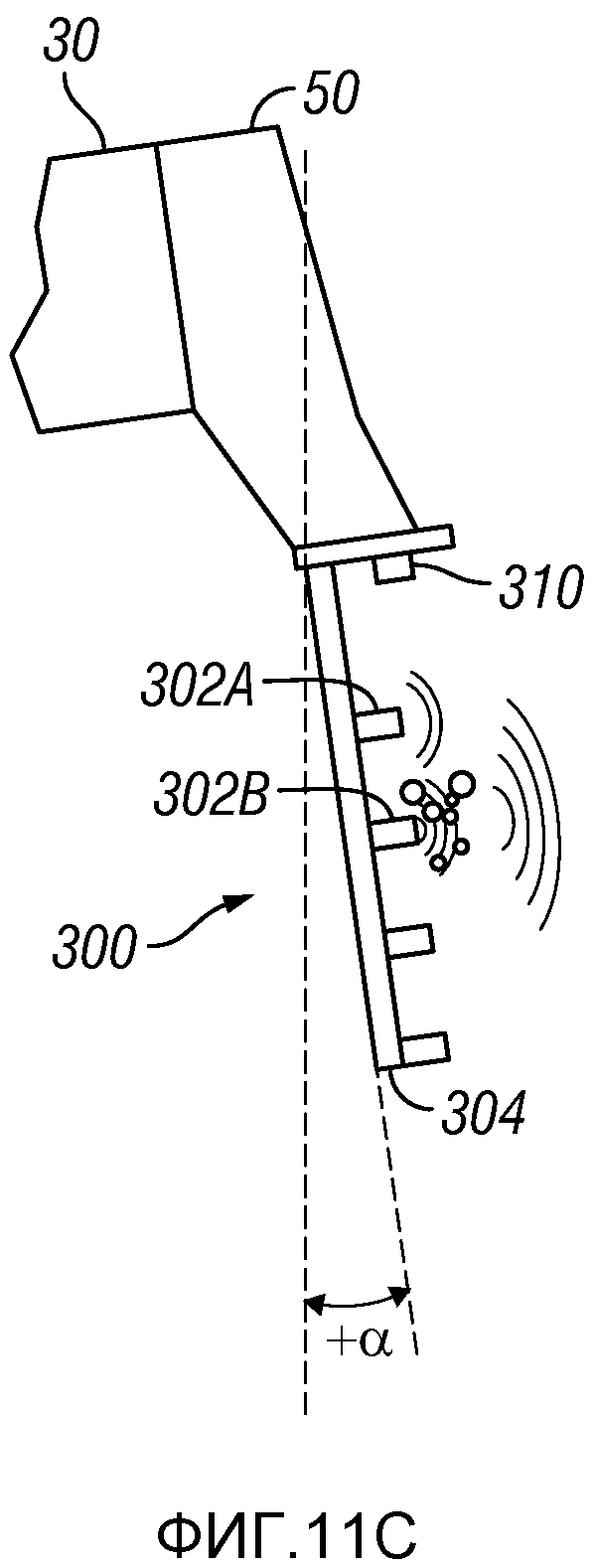
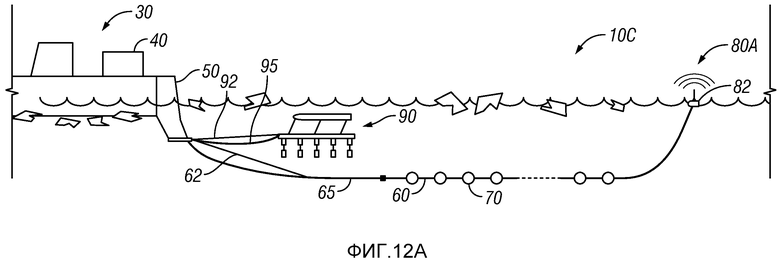

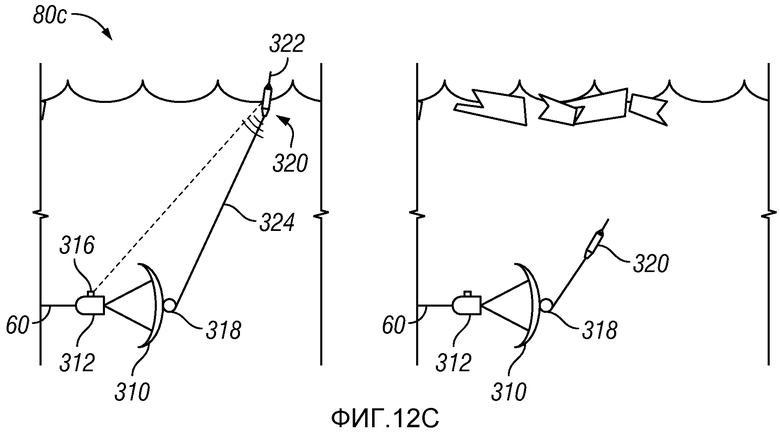
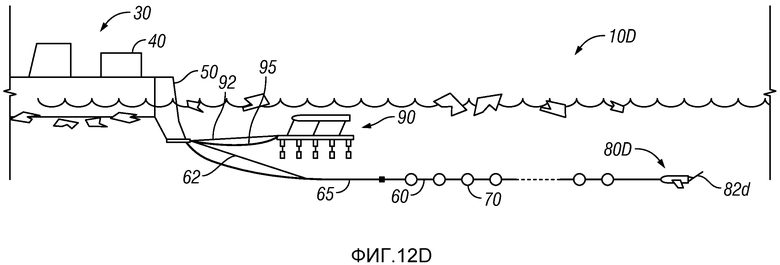
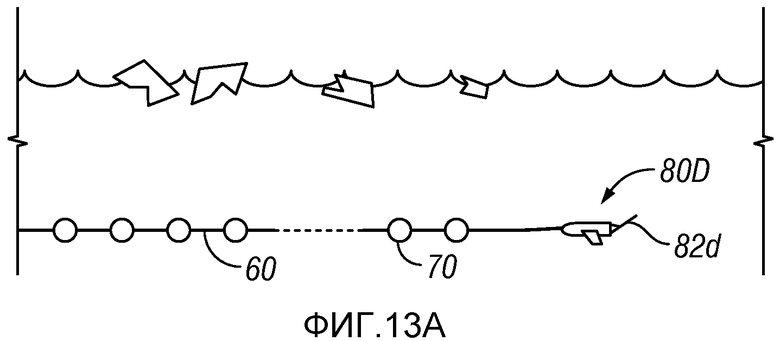
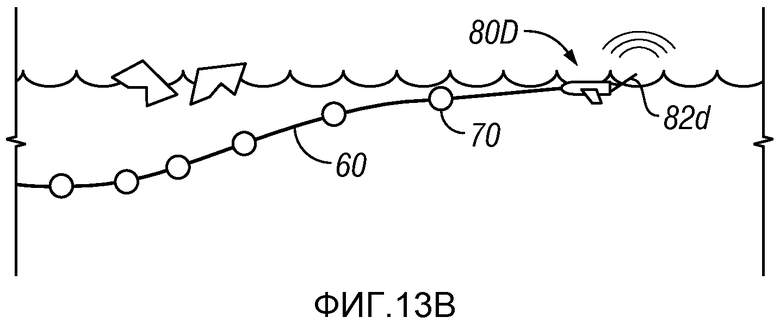
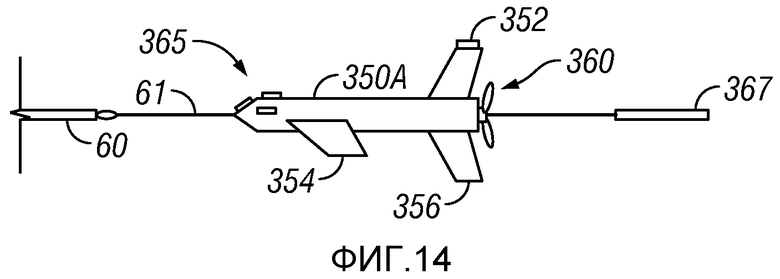
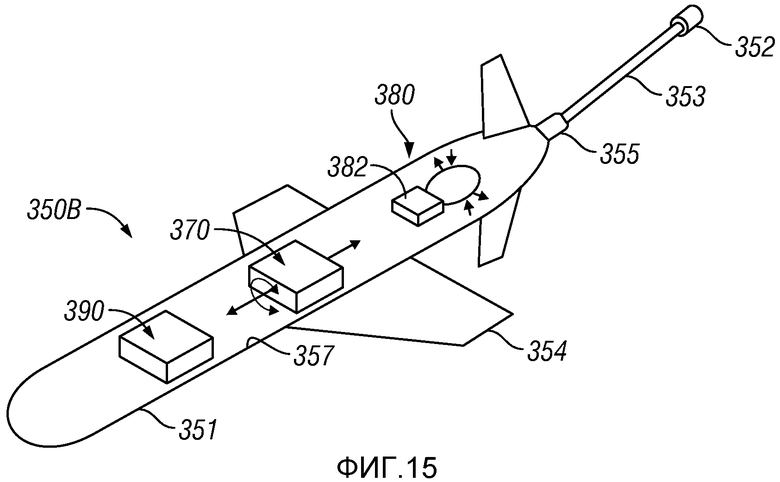
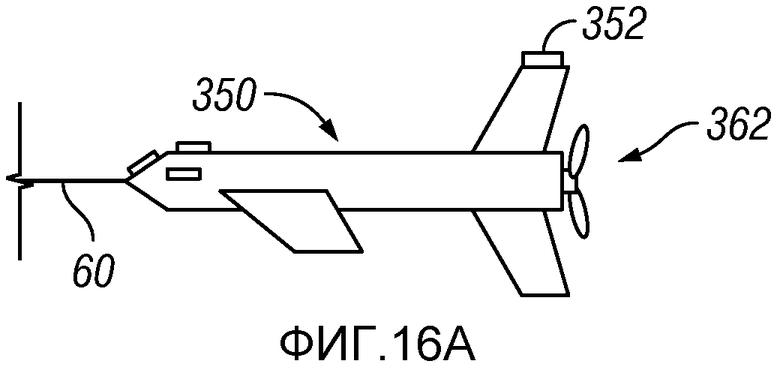
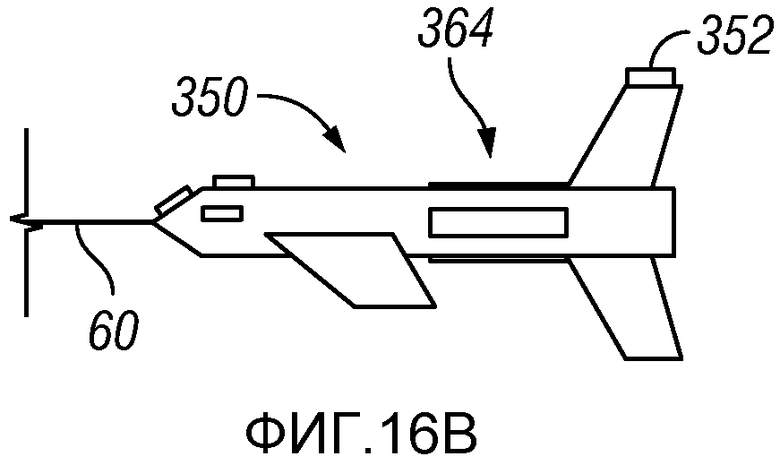

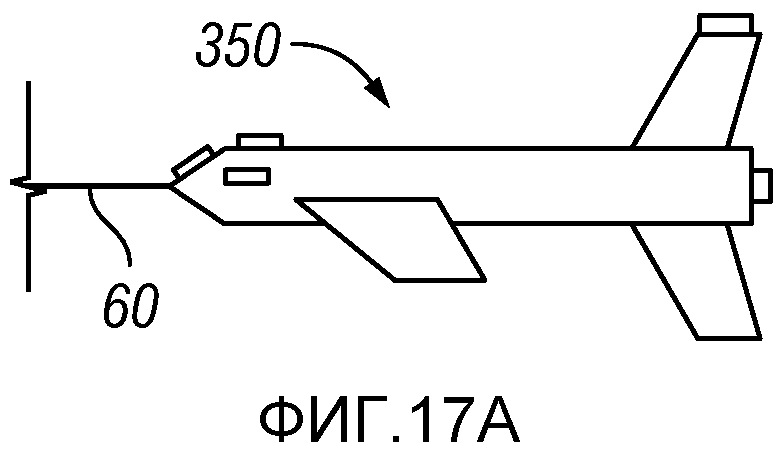
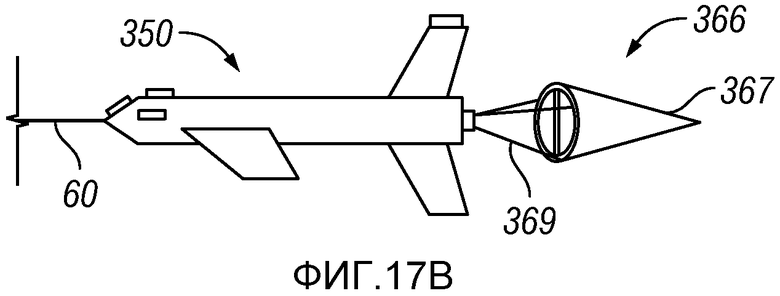
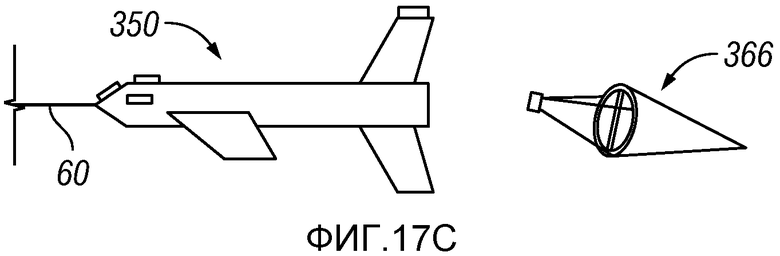
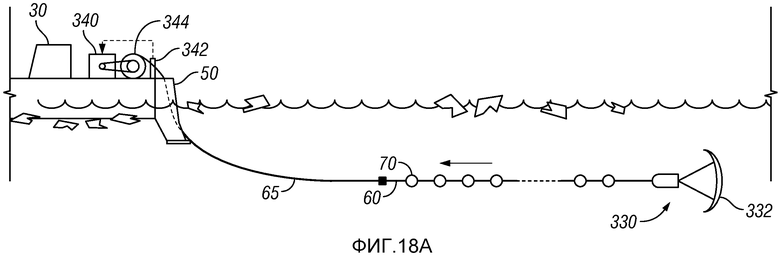
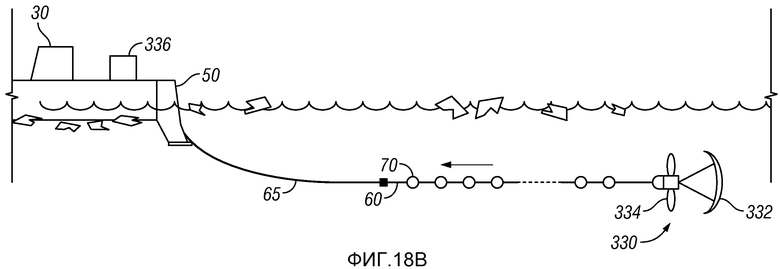
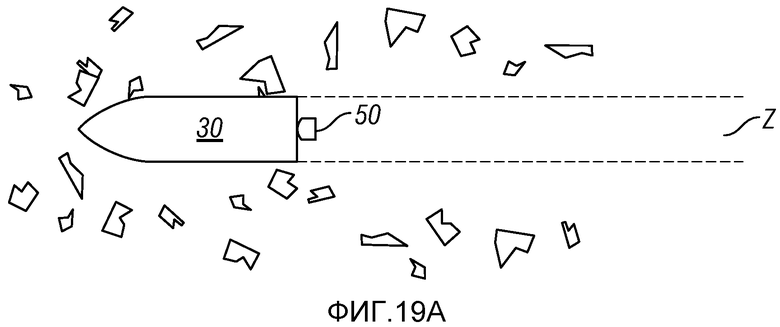
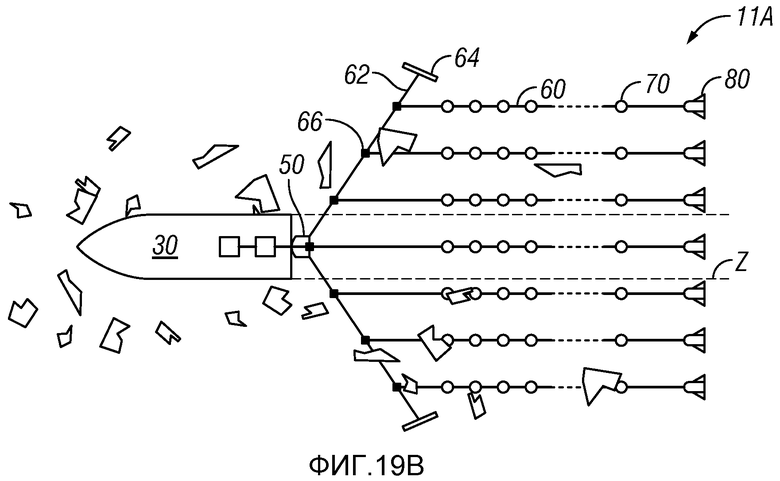

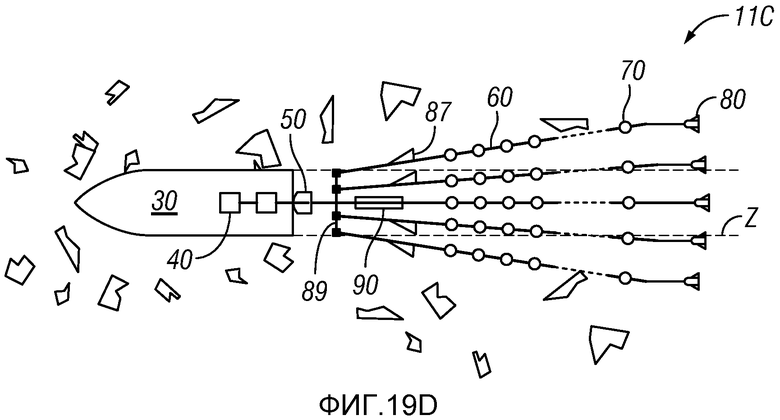

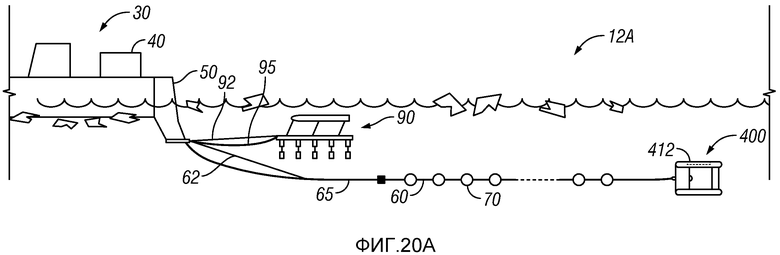

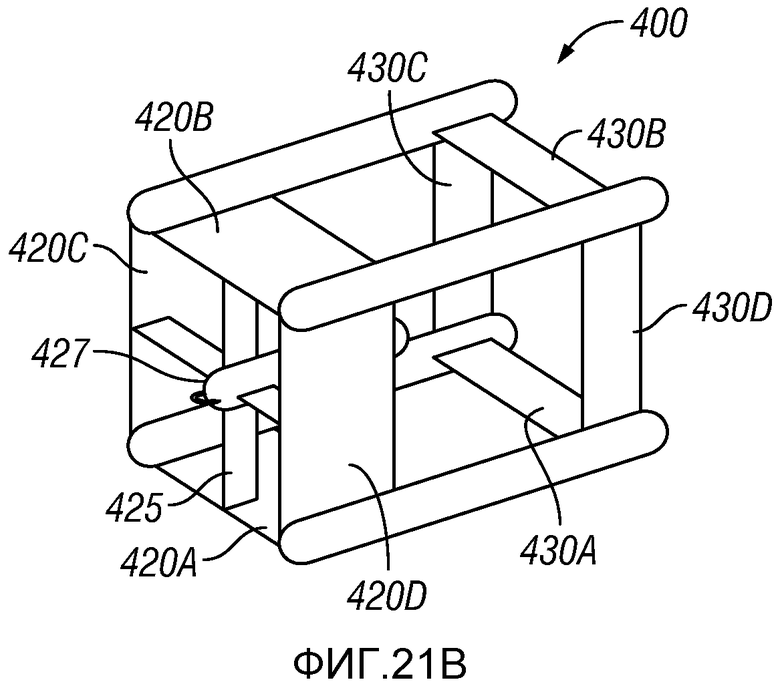
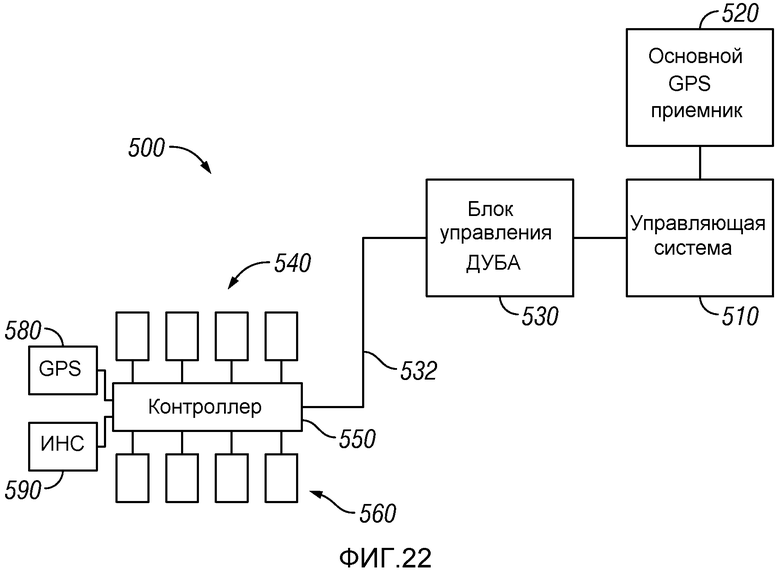


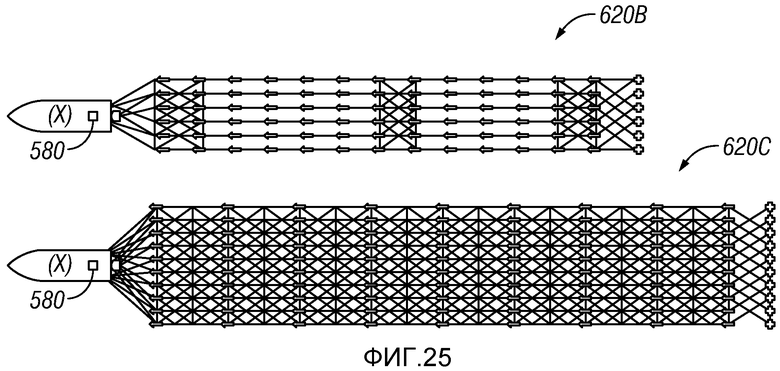

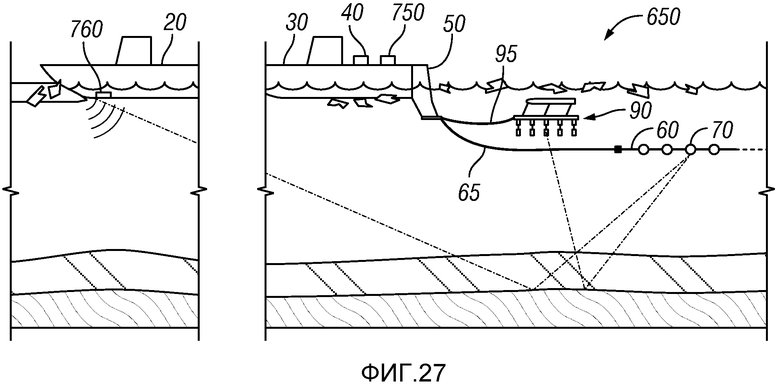
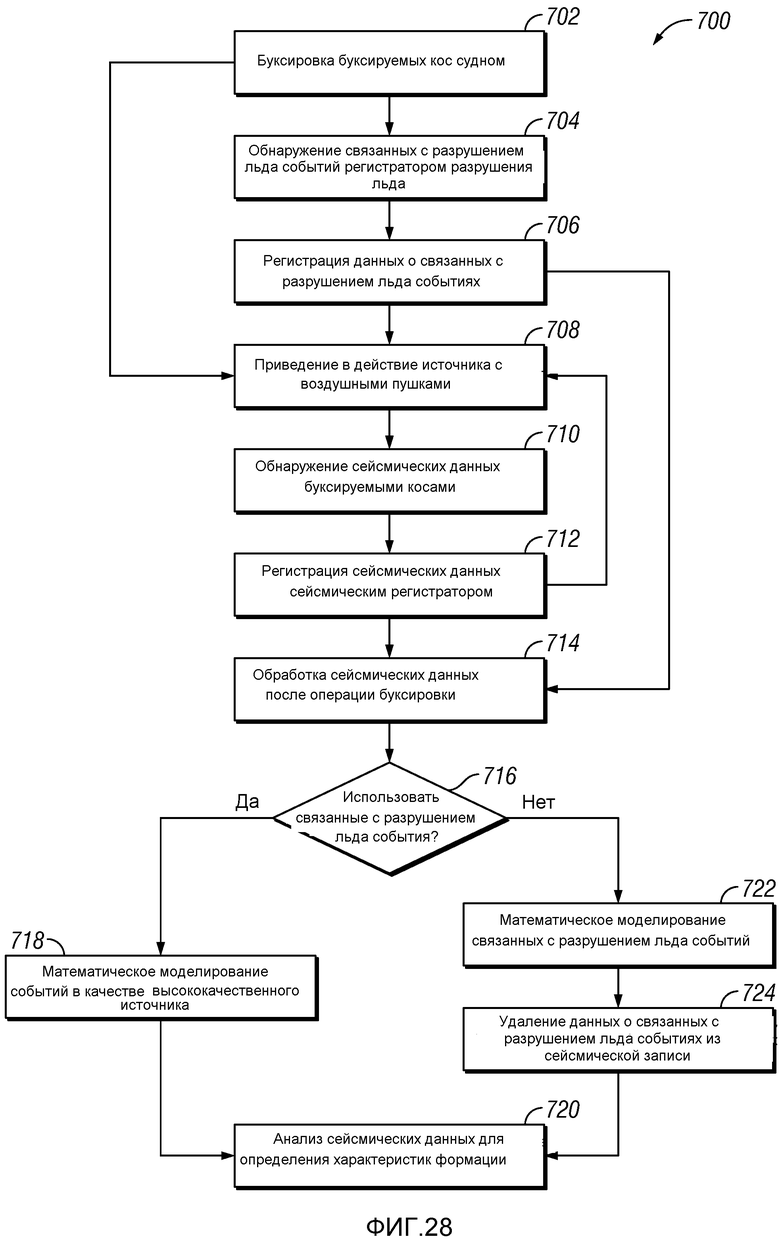

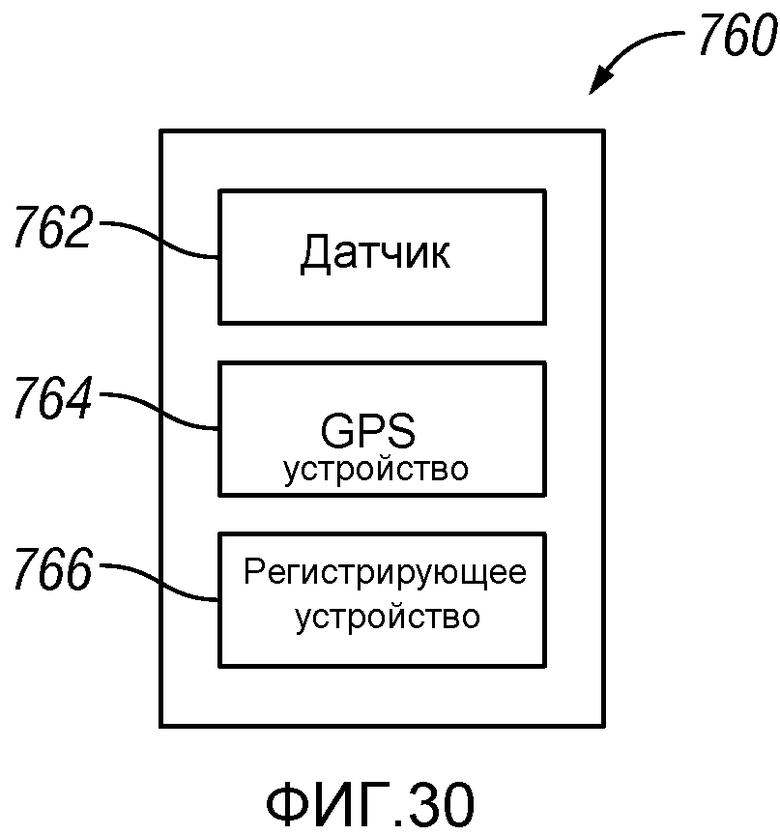
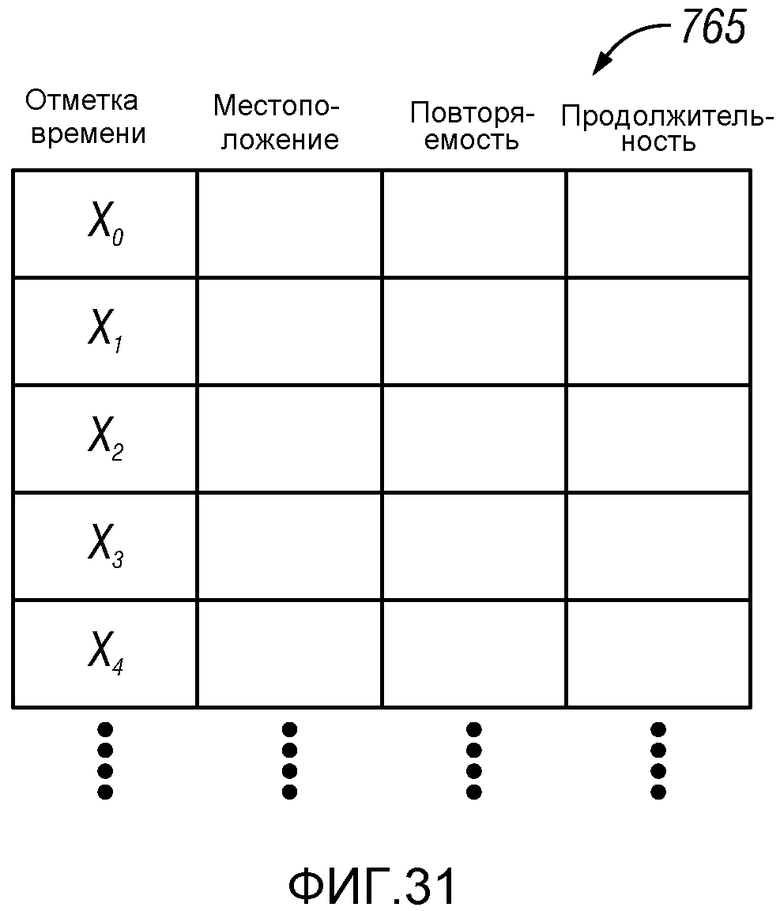
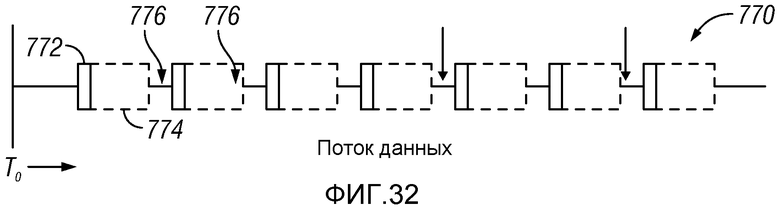

Изобретение относится к области геофизики и может быть использовано при разведочных работах на акватории водного пространства, покрытого льдом. Заявлен скег, установленный от кормы буксирующего судна и продолжающийся ниже ватерлинии. Канал в скеге защищает кабели для буксируемых кос и источника сейсмической системы, выпускаемой с судна. Буксировочные точки на скеге лежат ниже поверхности воды и соединены с буксирными тросами для поддержания буксируемых кос и источника. Плавучее устройство поддерживает источник и буксируется ниже поверхности воды для исключения столкновения с обломками ледяного поля. Буксируемые косы могут иметь аппараты, спускаемые на них, для регулирования положения буксируемых кос. Для облегчения определения местоположения буксируемых кос эти аппараты на буксируемых косах могут приводиться к поверхности, свободной от обломков ледяного поля, так что отсчеты глобальной системы позиционирования могут быть получены и переданы на управляющую систему. После получения отсчетов аппараты могут быть погружены обратно под поверхность. При выпуске, использовании и выборе системы в покрытом льдом районе принимается во внимание лед на поверхности. В дополнение к этому при обработке сейсмической записи учитывается шум, создаваемый связанными с ударами льда событиями. Технический результат: повышение качества сейсморазведочных работ. 3 н. и 38 з.п. ф-лы, 68 ил.
1. Морская сейсморазведочная установка для вод с препятствиями, при этом установка содержит скег, установленный на судне, при этом скег задает по меньшей мере один проход, продолжающийся ниже ватерлинии судна, по меньшей мере один проход защищает один или несколько кабелей морской сейсмической системы, проходящих от судна под ватерлинию, причем скег содержит одну или несколько буксировочных точек, расположенных на нем ниже ватерлинии и соединенных с одним или более буксирными тросами, буксируемых морской сейсмической системой.
2. Установка по п.1, в которой скег содержит основание, расположенное на дистальном конце его, при этом основание имеет одну или несколько буксировочных точек.
3. Установка по п.1, в которой скег временно или постоянно прикреплен к корпусу судна.
4. Установка по п.1, дополнительно содержащая по меньшей мере один источник морской сейсмической системы, выпускаемый с судна, при этом по меньшей мере один источник имеет по меньшей мере один кабель источника в качестве одного из одного или нескольких кабелей морской сейсмической системы, и в которой скег защищает по меньшей мере один кабель источника в по меньшей мере одном проходе.
5. Установка по п.4, в которой по меньшей мере одна из одной или более буксировочных точек, расположенных на скеге ниже ватерлинии соединяется с буксирным тросом, поддерживающим по меньшей мере один источник.
6. Установка по п.4, дополнительно содержащая плавучее устройство, поддерживающее по меньшей мере один источник в воде.
7. Установка по п.6, в которой плавучее устройство содержит множество буев, соединенных с по меньшей мере одним источником и буксируемых ниже поверхности воды.
8. Установка по п.6, в которой плавучее устройство буксируется ниже поверхности воды и содержит по меньшей мере один объем, заполняемый для регулирования плавучести.
9. Установка по п.1, дополнительно содержащая по меньшей мере одну буксируемую косу, выпускаемую с судна, при этом по меньшей мере одна буксируемая коса имеет по меньшей мере один кабель буксируемой косы в качестве одного из одного или нескольких кабелей морской сейсмической системы, и в которой скег защищает по меньшей мере один кабель буксируемой косы в по меньшей мере одном проходе.
10. Установка по п.9, в которой по меньшей мере одна из одной и более буксировочных точек, расположенная на скеге ниже ватерлинии, соединяется с буксирным тросом, поддерживающим по меньшей мере одну буксируемую косу.
11. Установка по п.9, дополнительно содержащая выпускаемое устройство, расположенное на по меньшей мере одной буксируемой косе, при этом выпускаемое устройство регулирует положение по меньшей мере одного участка по меньшей мере одной буксируемой косы в воде.
12. Установка по п.11, в которой выпускаемое устройство содержит приемник, расположенный на нем, для получения информации глобальной системы позиционирования.
13. Установка по п.11, в которой выпускаемое устройство, приводимое в действие в первом состоянии, буксируется ниже поверхности воды, и в которой выпускаемое устройство, приводимое в действие во втором состоянии, буксируется вблизи поверхности воды.
14. Установка по п.11, в которой выпускаемое устройство содержит аппарат, расположенный на дистальном конце по меньшей мере одной буксируемой косы и управляемый в поперечном и вертикальном положениях в воде.
15. Установка по п.9, в которой по меньшей мере одна буксируемая коса содержит выпускаемое устройство, расположенное на ней, при этом выпускаемое устройство содержит:
элемент, создающий сопротивление при буксировке по меньшей мере одной буксируемой косой по воде; и
буй, имеющий приемник для получения информации глобальной системы позиционирования, при этом буй вытянут от элемента к поверхности воды привязным тросом.
16. Установка по п.1, в которой скег содержит заднюю кромку и в которой по меньшей мере один проход скега задает по меньшей мере один открытый канал в задней кромке.
17. Установка по п.16, дополнительно содержащая ограничитель, удерживающий один из одного или нескольких кабелей в по меньшей мере одном проходе.
18. Установка по п.17, в которой ограничитель прикреплен к одну кабелю и в которой натяжной трос проходит от ограничителя и через по меньшей мере один проход, при этом натяжной трос вытягивает ограничитель с по меньшей мере одним участком одного кабеля в по меньшей мере один проход через по меньшей мере один открытый канал.
19. Установка по п.1, дополнительно содержащая источник, вытянутый от скега в вертикальной ориентации, при этом источник содержит множество элементов источника, расположенных на нем; и где установка содержит:
датчик, обнаруживающий угловую ориентацию элементов источника относительно вертикальной ориентации, и
контроллер, управляющий активацией элементов источника на основании обнаруживаемой угловой ориентации.
20. Установка по п.1, в которой скег смонтирован на корме судна, причем скег содержит:
первый кабелепровод, проходящий от кормы под ватерлинию и имеющий первый из по меньшей мере одного прохода,
второй кабелепровод, проходящий от кормы под ватерлинию, причем второй кабелепровод имеет второй из по меньшей мере одного прохода и отделенный от первого кабелепровода открытым пространством; и
основание, соединенное с первым и вторым кабелепроводами под ватерлинию и соединенное с корпусом судна.
21. Установка по п.20, в которой судно содержит единственный гребной винт и киль, при этом первый и второй кабелепроводы скега продолжаются от кормы судна к основанию и расположены по каждую сторону единственного гребного винта, основание соединено с килем.
22. Установка по п.1, в которой скег смонтирован на корме судна, причем судно, содержит по меньшей мере два гребных винта, при этом скег продолжается от кормы судна под ватерлинию между по меньшей мере двумя гребными винтами.
23. Установка по п.1, в которой установка содержит:
по меньшей мере один источник морской сейсморазведочной установки, буксируемый с судна ниже поверхности воды и генерирующий сейсмический сигнал источника;
по меньшей мере одну буксируемую косу морской сейсморазведочной установки, буксируемую с судна ниже поверхности воды и обнаруживающую сейсмический сигнал источника; и
по меньшей мере одно управляемое устройство, расположенное на по меньшей мере одной буксируемой косе, при этом по меньшей мере одно управляемое устройство имеет вертикальное положение, регулируемое в воде относительно поверхности воды, по меньшей мере одно управляемое устройство имеет приемник, получающий информацию глобальной системы позиционирования при нахождении по меньшей мере вблизи поверхности воды.
24. Установка по п.1, при этом установка содержит:
по меньшей мере один источник морской сейсморазведочной установки, буксируемый с судна ниже поверхности воды и генерирующий сигнал сейсмического источника;
по меньшей мере одну буксируемую косу морской сейсморазведочной установки, буксируемую с судна ниже поверхности воды и обнаруживающую сигнал сейсмического источника; и погружаемое плавучее устройство, буксируемое ниже поверхности воды и поддерживающее по меньшей мере один источник на уровне в воде.
25. Установка по п.1, при этом установка содержит:
выпускаемое устройство, расположенное на конце сейсмической буксируемой косы морской сейсморазведочной установки, буксируемой ниже поверхности воды, при этом выпускаемое устройство создает сопротивление при буксировке сейсмической буксируемой косой;
буй, имеющий приемник для получения информации глобальной системы позиционирования, при этом буй вытянут от конца сейсмической буксируемой косы к поверхности воды; и
соединение, соединяющее буй с концом сейсмической буксируемой косы и способное нарушаться в результате натяжения.
26. Установка по п.1 дополнительно содержащая:
первый датчик, акустически связанный с корпусом по меньшей мере одного судна и получающий информацию о соударениях;
устройство определения местоположения, расположенное на по меньшей мере одном судне и получающее информацию о местоположении;
первый регистратор, в рабочем состоянии соединенный с первым датчиком и устройством определения местоположения и регистрирующий первую информацию, при этом первая информация включает в себя информацию о соударениях, информацию о местоположении и временную информацию об ударах льда о корпус;
источник, буксируемый в воде позади по меньшей мере одного судна и генерирующий сейсмический сигнал источника;
по меньшей мере один датчик, буксируемый в воде позади по меньшей мере одного судна и обнаруживающий сейсмическую энергию; и
второй регистратор, в рабочем состоянии соединенный с по меньшей мере одним датчиком и регистрирующий вторую информацию, при этом вторая информация включает в себя обнаруженную сейсмическую энергию, информацию о местоположении и временную информацию,
в которой первая и вторая информация обрабатывается совместно для получения сейсмической записи.
27. Способ морской сейсморазведки в водах с препятствиями, при этом способ содержит этапы, на которых выпускают по меньшей мере одну буксируемую косу с судна, используя по меньшей мере один кабель буксируемой косы;
буксируют по меньшей мере одну буксируемую косу ниже поверхности воды;
выпускают по меньшей мере один источник с судна, используя по меньшей мере один кабель источника;
буксируют по меньшей мере один источник ниже поверхности воды; и
защищают проход по меньшей мере одного кабеля буксируемой косы и по меньшей мере одного кабеля источника в по меньшей мере одном кабелепроводе, продолжающемся от судна под поверхность воды,
причем буксировка по меньшей мере одной косы ниже поверхности воды содержит поддержание по меньшей мере одной косы буксирным тросом, соединенным по меньшей мере с одной буксировочной точкой, расположенной на по меньшей мере одном кабелепроводе под поверхностью воды.
28. Способ по п.27, в котором защита содержит размещение по меньшей мере одного кабеля буксируемой косы и по меньшей мере одного кабеля источника в по меньшей мере одном кабелепроводе, продолжающемся от кормы судна.
29. Способ по п.27, в котором размещение содержит выпуск ограничителя на по меньшей мере одном кабеле буксируемой косы и вытягивание ограничителя и по меньшей мере одного кабеля буксируемой косы на открытую кромку кабелепровода.
30. Способ по п.27, в котором размещение содержит выпуск ограничителя на по меньшей мере одном кабеле источника и вытягивание ограничителя и по меньшей мере одного кабеля источника на открытую кромку кабелепровода.
31. Способ по п.27, в котором буксировка по меньшей мере одной буксируемой косы содержит поддержание по меньшей мере одной буксируемой косы буксирным тросом, расположенным в по меньшей мере одном кабелепроводе ниже поверхности воды.
32. Способ по п.27, в котором буксировка по меньшей мере одного источника содержит:
поддержание по меньшей мере одного источника плавучим устройством; и буксировку плавучего устройства ниже поверхности воды.
33. Способ по п.27, в котором выпуск по меньшей мере одной буксируемой косы содержит:
выпуск множества буксируемых кос с судна; и
регулирование поперечных и вертикальных положений буксируемых кос с использованием управляемых устройств, выпущенных на буксируемых косах.
34. Способ по п.27, дополнительно содержащий выбор одной из буксируемых кос на судно при регулировании поперечного и вертикального положений одной буксируемой косы относительно других буксируемых кос.
35. Способ по п.27, в котором буксировка по меньшей мере одной буксируемой косы содержит регулирование по меньшей мере вертикального положения по меньшей мере одной буксируемой косы с использованием управляемого устройства, выпущенного на дистальном конце по меньшей мере одной буксируемой косы.
36. Способ по п.35, дополнительно содержащий:
перемещение поперечного положения управляемого устройства вблизи поверхности; и
получение информации глобальной системы позиционирования приемником глобальной системы позиционирования на управляемом устройстве вблизи поверхности.
37. Способ по п.36, дополнительно содержащий определение местоположения по счислению по меньшей мере буксируемой косы на основании информации глобальной системы позиционирования, когда вертикальное положение управляемого устройства находится на расстоянии от поверхности.
38. Способ по п.27, дополнительно содержащий этапы, на которых:
обнаруживают событие, связанное с ударами льда о корпус судна или по меньшей мере одно другое судно;
регистрируют обнаруженное событие, связанное с ударами льда;
генерируют сейсмический сигнал источника источником, буксируемым позади по меньшей мере одного судна;
обнаруживают сейсмическую энергию по меньшей мере одним датчиком, буксируемым позади по меньшей мере одного судна; и регистрируют сейсмическую запись на основании обнаруженной сейсмической энергии.
39. Способ по п.38, дополнительно содержащий фильтрацию зарегистрированного события, связанного с ударами льда, из сейсмической записи.
40. Способ по п.38, дополнительно содержащий:
выделение зарегистрированного события, связанного с ударами льда, из сейсмической записи; и
использование выделенного события, связанного с ударами льда, в качестве сейсмических данных.
41. Судно для морской сейсморазведки, причем судно имеет морскую сейсморазведочную установку по одному из пп.1-26.
| КОМПЛЕКС ДЛЯ БУКСИРОВКИ ЗАБОРТНОГО СЕЙСМООБОРУДОВАНИЯ | 2006 |
|
RU2317572C1 |
| Электрический ударный инструмент | 1926 |
|
SU13929A1 |
| Пресс для выдавливания из деревянных дисков заготовок для ниточных катушек | 1923 |
|
SU2007A1 |
| СПОСОБ МОРСКОЙ СЕЙСМИЧЕСКОЙ РАЗВЕДКИ НА АКВАТОРИЯХ С ЛЕДОВЫМ ПОКРОВОМ | 1990 |
|
SU1835938A1 |
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |

