Область техники
[0001] Настоящее изобретение относится к устройству бесконтактной (т.е. беспроводной или индуктивной) подачи электричества, транспортному средству и системе бесконтактной подачи электричества.
Уровень техники
[0002] Известно устройство удаленного управления, которое беспроводным образом управляет управляемой секцией посредством работы мобильной секции, при этом управляемая секция предусмотрена в основной секции (см. патентный документ 1). Основная секция включает в себя секцию формирования электромагнитных волн и приемник, при этом секция формирования электромагнитных волн формирует электромагнитную волну от подающей электрическую мощность катушки. Мобильная секция включает в себя средство формирования мощности постоянного тока, вторичную батарею и передатчик, при этом средство формирования мощности постоянного тока принимает электромагнитную волну посредством принимающей электрическую мощность катушки и генерирует мощность постоянного тока на основе электромагнитной волны, и при этом вторичная батарея заряжается средством формирования мощности постоянного тока. Это устройство удаленного управления принимает посредством приемника секретный код, который выводится и передается из передатчика посредством радиоволн, и управляет работой при соответствии секретного кода.
[0003] Однако, в этом предшествующем уровне техники передача и прием сигнала посредством радиоволн между приемником и передатчиком может вызывать помехи радиоволн на окружающие беспроводные устройства.
Документ(ы) предшествующего уровня
Патентный документ(ы)
[0004] Патентный документ 1: JP 9-130864 A
Сущность изобретения
[0005] Целью настоящего изобретения является предоставление системы бесконтактной подачи электричества, которая пресекает помехи радиоволн с окружающими беспроводными устройствами.
[0006] Согласно настоящему изобретению, система бесконтактной (т.е. беспроводной или индуктивной) подачи электричества содержит первое средство связи, которое осуществляет беспроводную связь между транспортным средством и устройством подачи электричества, и второе средство связи, отличное от первого средства связи, при этом второе средство связи осуществляет беспроводную связь между транспортным средством и устройством подачи электричества, при этом система бесконтактной подачи электричества осуществляет беспроводную связь с транспортным средством посредством второго средства связи после осуществления беспроводной связи с транспортным средством посредством первого средства связи.
[0007] Согласно настоящему изобретению, возможно пресекать помехи радиоволн второго средства связи на периферийные устройства, поскольку второе средство связи запускается в условиях, когда транспортное средство оказывается рядом с устройством подачи электричества.
Краткое описание чертежей
[0008] Фиг. 1 - это блок-схема системы бесконтактной подачи электричества согласно варианту осуществления настоящего изобретения.
Фиг. 2 - это вид в перспективе подающей электрическую мощность катушки, секции приема сигнала, принимающей электрическую мощность катушки и секции передачи сигнала, которые включены в систему бесконтактной подачи электричества на фиг. 1.
Фиг. 3 показывает состояние, когда подающая электрическую мощность катушка и принимающая электрическую мощность катушка, включенные в систему бесконтактной подачи электричества на фиг. 1, обращены друг к другу без отклонения местоположения, при этом фиг. 3A является видом сверху, а фиг. 3B и 3C являются видами в перспективе.
Фиг. 4 показывает состояние, когда подающая электрическую мощность катушка и принимающая электрическую мощность катушка, включенные в систему бесконтактной подачи электричества на фиг. 1, обращены друг к другу с отклонением местоположения, при этом фиг. 4A является видом сверху, а фиг. 4B и 4C являются видами в перспективе.
Фиг. 5 показывает состояние, когда подающая электрическую мощность катушка и принимающая электрическую мощность катушка, включенные в систему бесконтактной подачи электричества на фиг. 1, обращены друг к другу с отклонением местоположения, и посторонний объект присутствует между подающей электрическую мощность катушкой и принимающей электрическую мощность катушкой, при этом фиг. 5A является видом сверху, а фиг. 5B и 5C являются видами в перспективе.
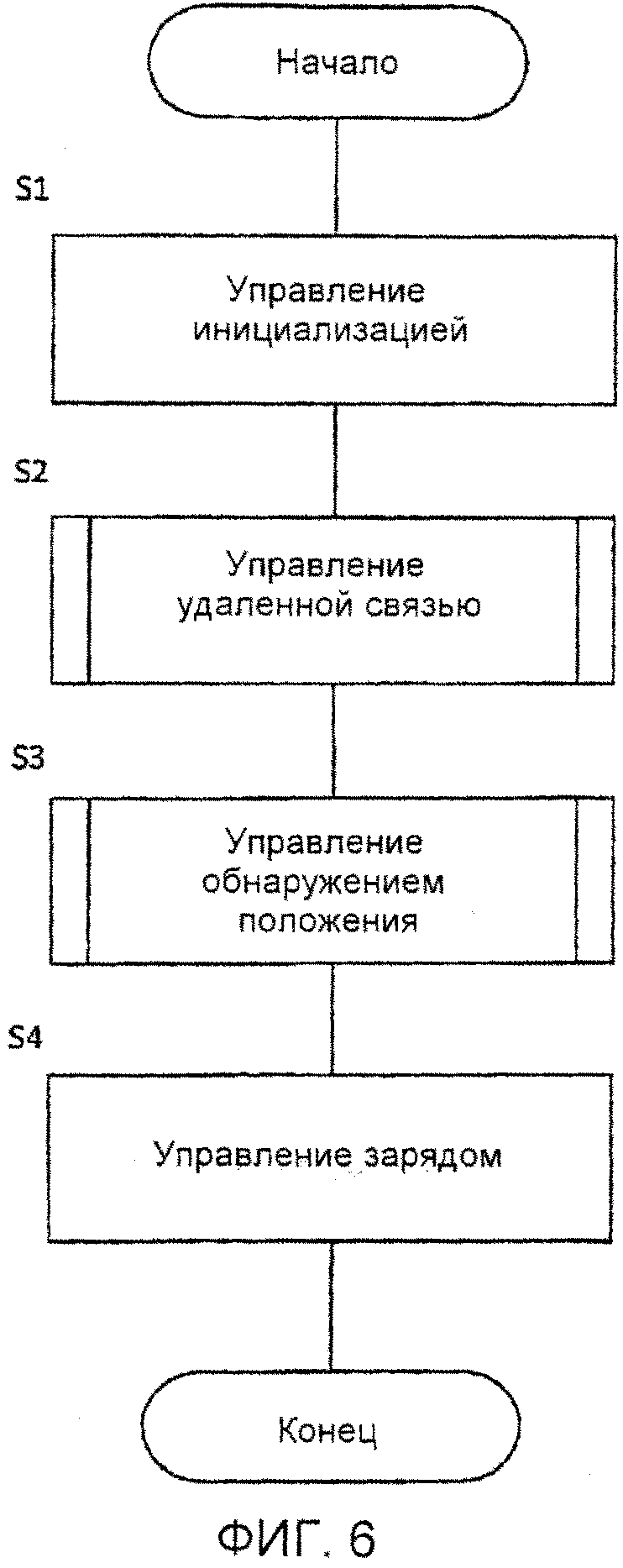
Фиг. 6 - это блок-схема последовательности операций, показывающая процесс управления устройства бесконтактной подачи электричества, включенного в систему бесконтактной подачи электричества по фиг. 1.
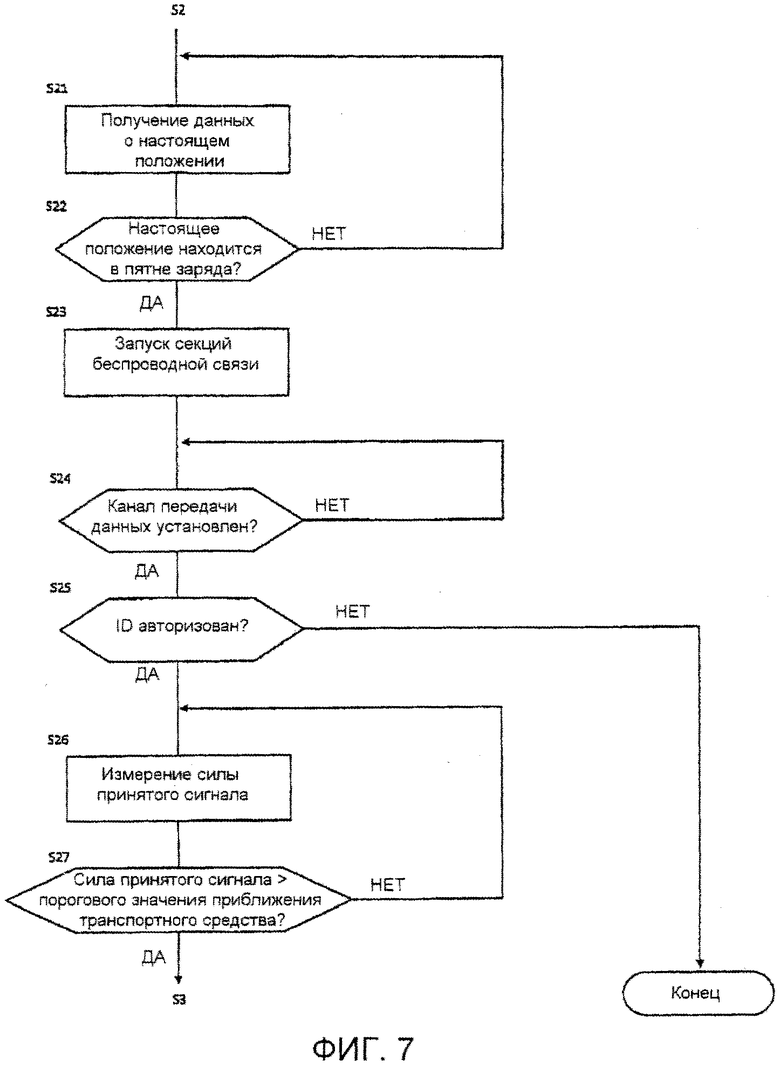
Фиг. 7 - это блок-схема последовательности операций, показывающая процесс управления для удаленного управления связью, показанного на фиг. 6.
Фиг. 8 - это блок-схема последовательности операций, показывающая процесс управления для управления обнаружением положения, показанного на фиг. 6.
Вариант(ы) осуществления изобретения
[0009] Далее описывается вариант осуществления настоящего изобретения со ссылкой на чертежи.
[0010] Фиг. 1 − это блок-схема системы бесконтактной подачи электричества, включающей в себя транспортное средство 200 и устройство 100 подачи электричества, которое включает в себя устройство бесконтактной подачи электричества согласно варианту осуществления настоящего изобретения. Блок устройства бесконтактной подачи электричества на стороне транспортного средства варианта осуществления установлен в электрическом транспортном средстве, но может быть установлен в гибридном электрическом транспортном средстве или т.п.
[0011] Как показано на фиг. 1, система бесконтактной подачи электричества этого варианта осуществления включает в себя транспортное средство 200 и устройство 100 подачи электричества, при этом транспортное средство 200 включает в себя блок со стороны транспортного средства, а устройство 100 подачи электричества является блоком со стороны земли. В этой системе электрическая мощность подается бесконтактным образом от устройства 100 подачи электричества, которое предусмотрено на станции электроснабжения или т.п., чтобы заряжать батарею 28, которая предусмотрена в транспортном средстве 200.
[0012] Устройство 100 подачи электричества включает в себя секцию 11 управления электрической мощностью, подающую электрическую мощность катушку 12, секцию 13 приема сигнала, секцию 14 беспроводной связи и секцию 15 управления. Устройство 100 подачи электричества является блоком со стороны земли, который предусмотрен на парковочном месте, где транспортное средство 200 припарковано, и подает электрическую мощность посредством бесконтактной подачи электричества между катушками, когда транспортное средство 200 припарковано в заданном местоположении при парковке.
[0013] Секция 11 управления электрической мощностью − это схема для выполнения преобразования из мощности переменного тока, переданной от источника 300 электрической мощности переменного тока, в мощность переменного тока высокой частоты и передачи ее к подающей электрическую мощность катушке 12. Секция 11 управления электрической мощностью включает в себя секцию 111 выпрямления, PFC (компенсация коэффициента мощности) схему 112, инвертор 113 и датчик 114. Секция 111 выпрямления − это схема, которая электрически соединена с источником 300 электрической мощности переменного тока и выпрямляет мощность переменного тока, выводимую из источника 300 электрической мощности переменного тока. PFC-схема 112 является схемой для улучшения коэффициента мощности посредством создания формы волны, выведенной из секции 111 выпрямления, и подключена между секцией 111 выпрямления и инвертором 113. Инвертор 113 - это схема преобразования мощности, которая включает в себя сглаживающий конденсатор и переключающий элемент, такой как IGBT. Инвертор 113 преобразует мощность постоянного тока в мощность переменного тока высокой частоты на основе сигнала управления переключением от секции 15 управления и подает ее к подающей электрическую мощность катушке 12. Датчик 114 подключен между PFC-схемой 112 и инвертором 113 и обнаруживает ток и напряжение. Подающая электрическую мощность катушка 12 − это катушка для подачи электрической мощности бесконтактным образом к принимающей электрическую мощность катушке 22, которая предусмотрена в транспортном средстве 200. Подающая электрическую мощность катушка 12 предусмотрена на парковочном месте, где предусмотрено устройство бесконтактной подачи электричества этого варианта осуществления.
[0014] Когда транспортное средство 200 припарковано в заданном местоположении для парковки, подающая электрическую мощность катушка 12 располагается под принимающей электрическую мощность катушкой 22 на некотором расстоянии от принимающей электрическую мощность катушки 22. Подающая электрическую мощность катушка 12 является круглой катушкой, которая параллельна поверхности парковочного места.
[0015] Секция 13 приема сигнала является датчиком, состоящим из принимающих сигнал антенн, и предусмотрена в устройстве 100 подачи электричества на стороне земли и принимает электромагнитную волну, которая передается из секции 23 передачи сигнала, измеряя магнитное поле вокруг принимающих сигнал антенн. Каждая принимающая сигнал антенна является антенной магнитного поля или т.п. Частота электромагнитной волны, передаваемой и принимаемой между секцией 13 приема сигнала и секцией 23 передачи сигнала, задается более низкой, чем частота связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи, которая описывается ниже. Частота электромагнитной волны принадлежит или близка к диапазону частот, используемому периферийным устройством транспортного средства, таким как интеллектуальный ключ. Связь между секцией 13 приема сигнала и секцией 23 передачи сигнала реализуется посредством системы связи, подходящей для связи на близком расстоянии, по сравнению со связью между секцией 14 беспроводной связи и секцией 24 беспроводной связи, которая описывается ниже.
[0016] Секция 14 беспроводной связи осуществляет двустороннюю связь с секцией 24 беспроводной связи, которая предусмотрена в транспортном средстве 200. Секция 14 беспроводной связи предусмотрена в устройстве 100 подачи электричества со стороны земли. Частота связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи задана более высокой, чем частота, используемая для связи между секцией 13 приема сигнала и секцией 23 передачи сигнала, а также выше, чем частота, используемая периферийным устройством транспортного средства, таким как интеллектуальный ключ. Соответственно, периферийное устройство транспортного средства маловероятно должно быть подвержено помехам из-за связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи. Связь между секцией 14 беспроводной связи и секций 24 беспроводной связи реализуется посредством системы беспроводной LAN или т.п. Связь между секцией 14 беспроводной связи и секцией 24 беспроводной связи, таким образом, реализуется посредством системы связи, подходящей для связи на больших расстояниях, по сравнению со связью между секцией 13 приема сигнала и секцией 24 передачи сигнала.
[0017] Секция 15 управления − это секция для управления всем устройством 100 подачи электричества. Секция 15 управления включает в себя секцию 151 измерения расстояния, секцию 152 обнаружения местоположения и секцию 153 выявления постороннего объекта и управляет секцией 11 управления электрической мощностью, подающей электрическую мощность катушкой 12, секцией 13 приема сигнала и секцией 14 беспроводной связи. Секция 15 управления передает транспортному средству 200 управляющий сигнал, указывающий начало подачи электрической мощности от устройства 100 подачи электричества, и принимает от транспортного средства 200 управляющий сигнал, указывающий запрос получения электрической мощности от устройства 100 подачи электричества, посредством связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи. Секция 15 управления выполняет управление переключением инвертора 113 и, тем самым, управляет подачей электрической мощности от подающей электрическую мощность катушки 12 в зависимости от тока, обнаруженного датчиком 114.
[0018] Транспортное средство 200 включает в себя принимающую электрическую мощность катушку 22, секцию 23 передачи сигнала, секцию 24 беспроводной связи, секцию 25 управления зарядкой, секцию 26 выпрямления, секцию 27 реле, батарею 28, инвертор 29 и электромотор 30. Принимающая электрическую мощность катушка 22 предусмотрена на нижней поверхности (шасси) или т.п. транспортного средства 200 и между задними колесами транспортного средства 200. Когда транспортное средство 200 припарковано в заданном местоположении для парковки, принимающая электрическую мощность катушка 22 располагается над подающей электрическую мощность катушкой 12 на некотором расстоянии от подающей электрическую мощность катушки 12. Принимающая электрическую мощность катушка 22 является круглой катушкой, которая параллельна поверхности парковочного места.
[0019] Секция 23 передачи сигнала является датчиком, состоящим из передающей сигнал антенны, и предусмотрена в транспортном средстве 200 и передает электромагнитную волну в секцию 13 приема сигнала. Передающая сигнал антенна является антенной магнитного поля или т.п. Секция 24 беспроводной связи осуществляет двухстороннюю беспроводную связь с секцией 14 беспроводной связи, предусмотренной в устройстве 100 подачи электричества. Секция 24 беспроводной связи предусмотрена в транспортном средстве 200.
[0020] Секция 26 выпрямления соединена с принимающей электрическую мощность катушкой 22 и состоит из схемы выпрямления для выпрямления в постоянный ток переменного тока, полученного в принимающей электрическую мощность катушке 22. Секция реле 27 включает в себя релейный переключатель, который включается и выключается под управлением секции 25 управления зарядом. Когда релейный переключатель выключен, секция 27 реле отсоединяет верхнюю систему электрической мощности, включающую в себя батарею 28, от нижней системы электрической мощности, включающей в себя принимающую электрическую мощность катушку 22 и секцию 26 выпрямления, которая составляет схему секции для заряда.
[0021] Батарея 28 состоит из множества вторичных ячеек, соединенных друг с другом, и служит в качестве источника электрической мощности транспортного средства 200. Инвертор 29 - это схема управления, такая как схема PWM-управления, включающая в себя переключающий элемент, такой как IGBT. Инвертор 29 преобразует в мощность переменного тока мощность постоянного тока, выведенную из батареи 28, и подает ее к электромотору 30 в зависимости от сигнала управления переключением. Электромотор 30 является электромотором трехфазного переменного тока или т.п. и служит в качестве силового источника для приведения в движение транспортного средства 200.
[0022] Секция 25 управления зарядом является контроллером для управления зарядом батареи 28. Секция 25 управления зарядом управляет секцией 23 передачи сигнала и секцией 24 беспроводной связи. Секция 25 управления зарядом отправляет секции 15 управления сигнал, указывающий начало заряда, посредством связи между секцией 24 беспроводной связи и секцией 14 беспроводной связи. Секция 25 управления зарядом соединяется через сеть CAN-связи с непоказанным контроллером, который управляет всем транспортным средством 200. Этот контроллер организует управление переключением инвертора 29 и состоянием заряда (SOC) батареи 28. Секция 25 управления зарядом передает секции 15 управления сигнал, указывающий завершение заряда, в зависимости от SOC батареи 28, когда достигнут полный заряд.
[0023] В устройстве бесконтактной подачи электричества этого варианта осуществления подача электрической мощности и прием электрической мощности высокочастотной мощности осуществляется посредством электромагнитной индукции между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22, которые не соприкасаются друг с другом. Другими словами, когда напряжение прикладывается к подающей электрическую мощность катушке 12, тогда магнитная связь возникает между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22, так что электрическая мощность подается от подающей электрическую мощность катушки 12 к принимающей электрическую мощность катушке 22.
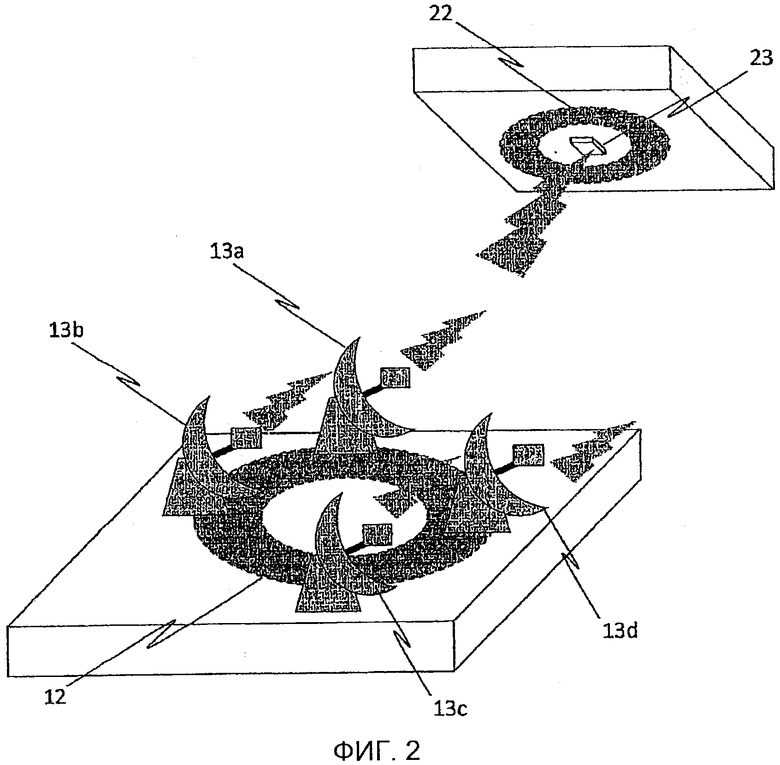
[0024] Далее описывается конфигурация секции 13 приема сигнала и секции 23 передачи сигнала со ссылкой на фиг. 2. Фиг. 2 - это вид в перспективе подающей электрическую мощность катушки 12, секции 13 приема сигнала, принимающей электрическую мощность катушки 22 и секции 23 передачи сигнала, которые включены в устройство бесконтактной подачи электричества этого варианта осуществления.
[0025] Секция 13 приема сигнала состоит из четырех принимающих сигнал антенн 13a, 13b, 13c, 13d, которые предусмотрены на периферии подающей электрическую мощность катушки 12. Принимающие сигнал антенны 13a, 13b, 13c, 13d размещены симметрично относительно центра подающей электрическую мощность катушки 12. Секция 23 передачи сигнала состоит из одной передающей сигнал антенны, которая предусмотрена в центральной точке секции 23 передачи сигнала.
[0026] Местоположения подающей электрическую мощность катушки 12 и секции 13 приема сигнала являются неизменными, поскольку подающая электрическую мощность катушка 12 и секция 13 приема сигнала предусмотрены в устройстве 10 подачи электричества на стороне земли. С другой стороны, местоположения принимающей электрическую мощность катушки 22 и секции 23 передачи сигнала изменяются относительно местоположений подающей электрическую мощность катушки 12 и секции 13 приема сигнала в зависимости от местоположения парковки транспортного средства 200 относительно предписанного парковочного места, поскольку принимающая электрическую мощность катушка 22 и секция 23 передачи сигнала предусмотрены в транспортном средстве 200.
[0027] Секция 13 приема сигнала и секция 23 передачи сигнала размещены так, что расстояние между местоположением каждой принимающей сигнал антенны 13a, 13b, 13c, 13d и местоположением секции 23 передачи сигнала равно друг другу, когда транспортное средство 200 припарковано в предписанном парковочном месте, так что центральная точка принимающей электрическую мощность катушки 22 и центральная точка подающей электрическую мощность катушки 12 идентичны друг другу в направлении плоскостей катушек для принимающей электрическую мощность катушки 22 и подающей электрическую мощность катушки 12, т.е. в направлении поверхностей принимающей электрическую мощность катушки 22 и подающей электрическую мощность катушки 12.
[0028] Каждая принимающая сигнал антенна 13a, 13b, 13c, 13d принимает сигнал, переданный от антенны секции 23 передачи сигнала. Когда центральная точка принимающей электрическую мощность катушки 22 и центральная точка подающей электрическую мощность катушки 12 идентичны в направлении поверхностей принимающей электрическую мощность катушки 22 и подающей электрическую мощность катушки 12, сила сигнала, принимаемого каждой принимающей сигнал антенной 13a, 13b, 13c, 13d, равна друг другу. С другой стороны, когда центральная точка принимающей электрическую мощность катушки 22 и центральная точка подающей электрическую мощность катушки 12 отклоняются друг от друга, сила сигнала, принимаемого каждой принимающей сигнал антенной 13a, 13b, 13c, 13d, не равна друг другу. Соответственно, в этом варианте осуществления, отклонение местоположения катушки выявляется посредством обнаружения взаимного расположения между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22 на основе выходных значений множества датчиков, сконфигурированных в секции 13 приема сигнала и секции 23 передачи сигнала, как описано ниже.
[0029] Далее описывается управление, выполняемое секцией 15 управления и секцией 25 управления зарядом, со ссылкой на фиг. 1 и 2.
[0030] Секция 15 управления выполняет проверку системы в качестве управления инициализацией, определяющего, работают ли нормально или нет системы устройства 100 подачи электричества. Аналогично, секция 25 управления зарядом выполняет проверку системы в качестве управления инициализацией, определяющего, работает ли нормально или нет зарядная система транспортного средства 200. Когда результат проверки системы указывает, что неисправность системы присутствует в транспортном средстве 200, секция 15 управления информирует пользователя. Когда результат проверки системы указывает, что неисправность системы присутствует в устройстве 100 подачи электричества, секция 15 управления уведомляет центр или т.п., который управляет устройством 100 подачи электричества. С другой стороны, когда проверка системы завершается нормально, секция 15 управления запускает секцию 14 беспроводной связи и, таким образом, устанавливает состояние, когда сигнал может быть принят. Например, проверка системы для устройства 100 подачи электричества выполняется с интервалами заданного периода, тогда как проверка системы для транспортного средства 200 выполняется, когда главный переключатель включается, при этом главный переключатель служит для того, чтобы запускать транспортное средство 200.
[0031] Секция 15 управления и секция 25 управления зарядом управляют секцией 14 беспроводной связи и секцией 24 беспроводной связи, соответственно, следуя удаленному управлению связью. Сначала, секция 25 управления зарядом получает информацию о текущем местоположении транспортного средства 200 посредством GPS-функции, предусмотренной в транспортном средстве 200, и определяет, находится или нет текущее местоположение транспортного средства 200 в пределах предварительно определенного места заряда. Место заряда устанавливается индивидуально для устройства 100 подачи электричества и является, например, областью, которая отображается на карте как круг, имеющий центр в местоположении устройства 100 подачи электричества. Состояние, когда транспортное средство 200 находится в пределах места заряда, означает, что заряд батареи 28 будет осуществляться посредством устройства 100 подачи электричества, соответствующего месту заряда.
[0032] Когда текущее местоположение транспортного средства 200 находится в пределах места заряда, секция 25 управления зарядом запускает секцию 24 беспроводной связи и, таким образом, предоставляет возможность связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи. Когда связь разрешена между секцией 14 беспроводной связи и секцией 24 беспроводной связи, тогда секция 25 управления зарядом отправляет из секции 24 беспроводной связи в секцию 14 беспроводной связи сигнал для установления канала передачи данных. Затем, секция 15 управления отправляет обратно из секции 14 беспроводной связи в секцию 24 беспроводной связи сигнал, который указывает, что секция 15 управления приняла сигнал. Этот процесс устанавливает канал передачи данных между секцией 14 беспроводной связи и секцией 24 беспроводной связи.
[0033] Более того, секция 25 управления зарядом передает ID транспортного средства 200 в секцию 15 управления посредством связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи. Секция 15 управления выполняет аутентификацию ID, определяя, совпадает или нет ID, переданный из транспортного средства 200, с одним из зарегистрированных ID. В этой системе бесконтактной подачи электричества заряжаемые транспортные средства 200 заранее зарегистрированы по ID в каждом устройстве 100 подачи электричества. Соответственно, транспортное средство 200 может снабжаться электричеством, когда аутентификация ID указывает, что ID транспортного средства 200 совпадает с зарегистрированным ID.
[0034] Когда канал передачи данных установлен, и аутентификация ID закончена, тогда секция 25 управления зарядом отправляет сигнал из секции 24 беспроводной связи в секцию 14 беспроводной связи с предварительно определенными интервалами, в то время как транспортное средство 200 приближается к устройству 100 подачи электричества, соответствующему месту заряда. Секция 15 управления измеряет расстояние между транспортным средством 200 и устройством 100 подачи электричества посредством секции 151 измерения расстояния. Секция 14 беспроводной связи принимает сигнал, передаваемый периодически из секции 24 беспроводной связи. Секция 151 измерения расстояния измеряет расстояние между транспортным средством 200 и устройством 100 подачи электричества на основе напряженности электрического поля принятого сигнала.
[0035] Секции 15 управления предоставляется пороговое значение, которое задано в качестве предварительно определенного порогового значения приближения транспортного средства для указания состояния того, что транспортное средство 200 приблизилось к устройству 100 подачи электричества так, что расстояние между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22 в направлении поверхностей подающей электрическую мощность катушки 12 и принимающей электрическую мощность катушки 22 становится коротким. В этом варианте осуществления пороговое значение приближения транспортного средства предварительно определяется с точки зрения силы сигнала, поскольку сила принятого сигнала находится во взаимосвязи с расстоянием между транспортным средством 200 и устройством 100 подачи электричества.
[0036] Секция 15 управления сравнивает напряженность электрического поля принятого сигнала с пороговым значением приближения транспортного средства и определяет, короче или нет расстояние между транспортным средством 200 и устройством 10 подачи электричества, чем предварительно определенное значение. Когда расстояние между транспортным средством 200 и устройством 100 подачи электричества короче, чем предварительно определенное значение, тогда секция 15 управления запускает секцию 13 приема сигнала и передает управляющий сигнал из секции 14 беспроводной связи в секцию 24 беспроводной связи. При приеме управляющего сигнала секция 25 управления зарядом запускает секцию 23 передачи сигнала. Соответственно, секция 13 приема сигнала запускается до секции 23 передачи сигнала.
[0037] Таким образом, в этом варианте осуществления, передача и прием сигнала между секцией 13 приема сигнала и секцией 23 передачи сигнала не выполняется постоянно, и секция 13 приема сигнала и секция 23 передачи сигнала запускаются, чтобы выполнять передачу и прием сигнала, когда транспортное средство 200 приблизилось к устройству 100 подачи электричества. Секция 13 приема сигнала и секция 23 передачи сигнала управляются, чтобы запускаться и излучать радиоволны, когда секция 13 приема сигнала и секция 23 передачи сигнала приближаются друг к другу так, что подающая электрическую мощность катушка 12 и принимающая электрическую мощность катушка 22 перекрываются друг с другом. Это служит для пресечения воздействий утечек радиоволн из секции 13 приема сигнала и секции 23 передачи сигнала на другие окружающие устройства.
[0038] После завершения удаленного управления связью секция 15 управления и секция 25 управления зарядом выполняют управление для обнаружения местоположения следующим образом. При распознавании того, что транспортное средство 200 становится неподвижным, секция 25 управления зарядом передает сигнал от передающей сигнал антенны секции 23 передачи сигнала принимающим сигнал антеннам 13a, 13b, 13c, 13d секции 13 приема сигнала. Секция 15 управления измеряет выходное значение сигнала, принятого каждой принимающей сигнал антенной 13a, 13b, 13c, 13d, и сначала определяет, являются или нет принимающие сигнал антенны 13a, 13b, 13c, 13d и посылающая сигнал антенна нормальными. Секции 15 управления предоставляется верхнее предельное значение и нижнее предельное значение, которые заданы в качестве пороговых значений определения местоположения для определения неисправности антенн. Когда все выходные значения принимающих сигнал антенн 13a, 13b, 13c, 13d находятся в диапазоне от нижнего предельного значения до верхнего предельного значения, тогда секция 15 управления определяет, что секция 13 приема сигнала и секция 23 передачи сигнала работают нормально. С другой стороны, когда выходное значение принимающей сигнал антенны 13a, 13b, 13c, 13d выше верхнего предельного значения или ниже нижнего предельного значения, тогда секция 15 управления определяет, что, по меньшей мере, одна из секции 13 приема сигнала и секции 23 передачи сигнала отказала. При определении того, что секция 13 приема сигнала или секция 23 передачи сигнала отказала, секция 15 управления передает сигнал, указывающий неисправность, посредством секции 14 беспроводной связи и секции 24 беспроводной связи, в секцию 25 управления зарядом. Затем, секция 25 управления зарядом уведомляет пользователя о неисправности секции 13 приема сигнала или секции 23 передачи сигнала. С другой стороны, секция 15 управления уведомляет центр, который управляет устройством 100 подачи электричества, о неисправности секции 13 приема сигнала или секции 23 передачи сигнала.
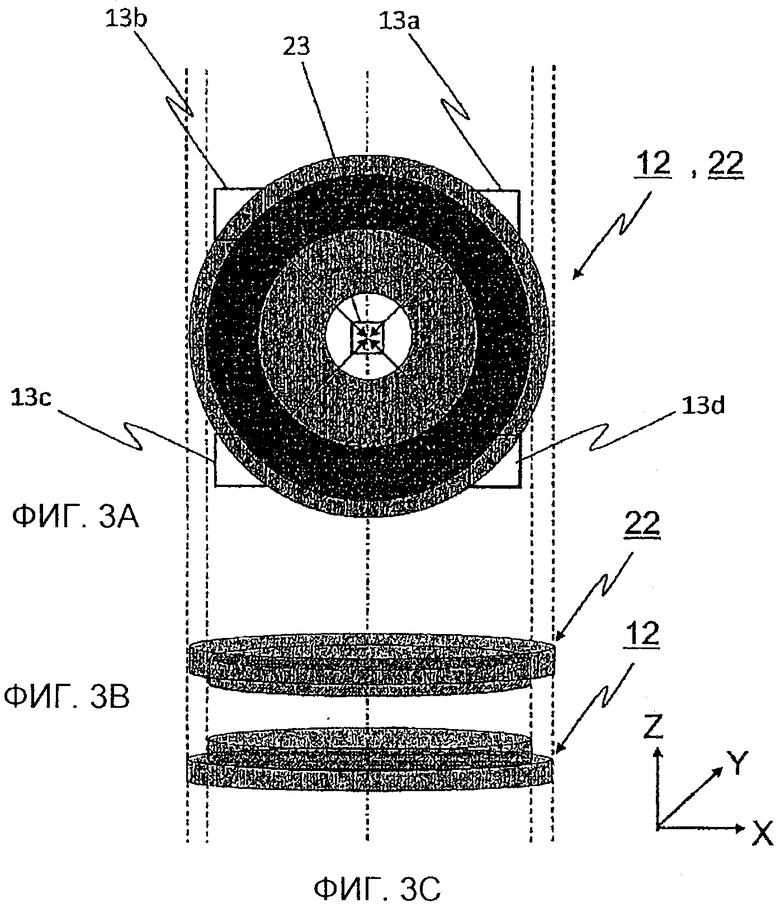
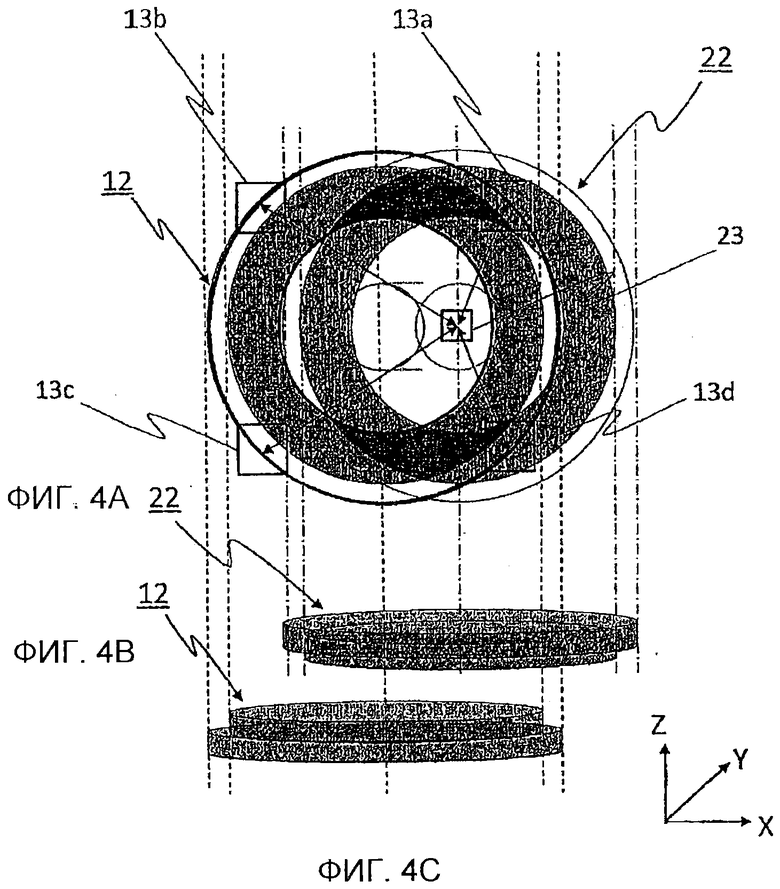
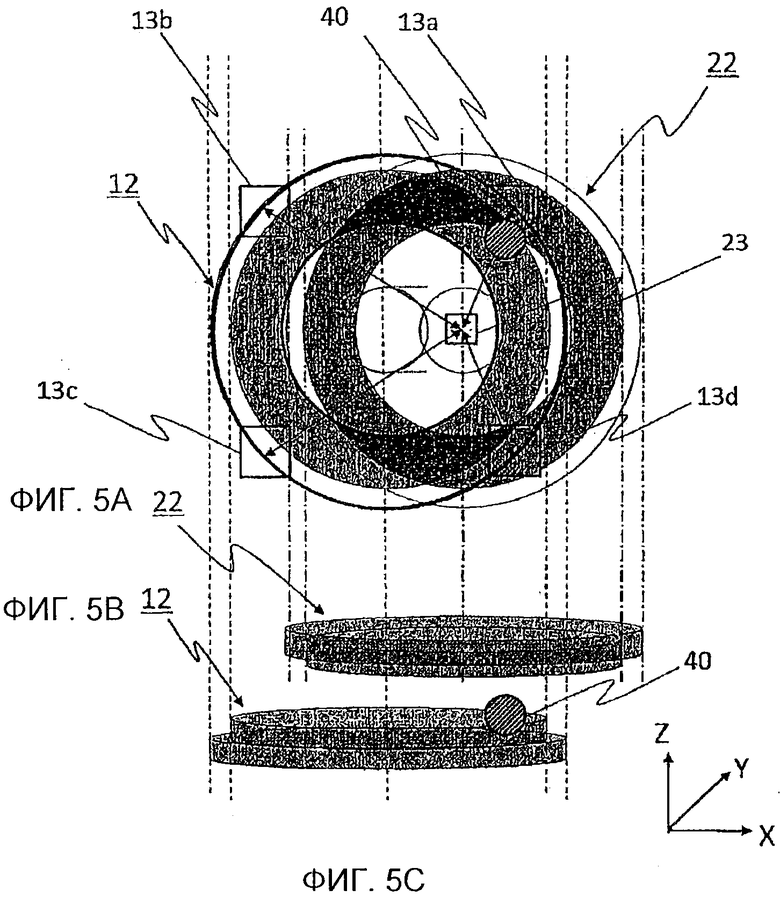
[0039] Когда секция 13 приема сигнала и секция 23 передачи сигнала являются нормальными, секция 15 управления выявляет отклонение местоположения между катушками, а именно, выявляет состояние перекрывания между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой, посредством секции 152 обнаружения местоположения, и выявляет присутствие постороннего объекта между катушками посредством секции 153 выявления постороннего объекта следующим образом. Далее описывается управление выявлением отклонения местоположения между катушками и управление для выявления постороннего объекта между катушками со ссылкой на фиг. 3-5. Фиг. 3 показывает состояние, когда подающая электрическую мощность катушка 12 и принимающая электрическую мощность катушка 22 обращены друг к другу без отклонения местоположения, при этом фиг. 3A является видом сверху, а фиг. 3B и 3C являются видами в перспективе. Фиг. 4 показывает состояние, когда подающая электрическую мощность катушка 12 и принимающая электрическую мощность катушка 22 обращены друг к другу с отклонением местоположения, при этом фиг. 4A является видом сверху, а фиг. 4B и 4C являются видами в перспективе. Фиг. 5 показывает состояние, когда посторонний объект 40 присутствует на подающей электрическую мощность катушке 12 относительно фиг. 4, при этом фиг. 5A является видом сверху, а фиг. 5B и 5C являются видами в перспективе. Ось X и ось Y представляют направление поверхностей подающей электрическую мощность катушки 12 и принимающей электрическую мощность катушки 22, а ось Z представляет направление высоты.
[0040] Когда центральная точка подающей электрическую мощность катушки 12 и центральная точка принимающей электрическую мощность катушки 22 идентичны друг другу в направлении поверхностей подающей электрическую мощность катушки 12 и принимающей электрическую мощность катушки 22, как показано на фиг. 3, расстояния от передающей сигнал антенны секции 23 передачи сигнала до каждой принимающей сигнал антенны 13a, 13b, 13c, 13d секции 13 приема сигнала равны друг другу, так что выходные значения сигналов, принятых принимающими сигнал антеннами 13a, 13b, 13c, 13d, равны друг другу. Выходное значение каждой принимающей сигнал антенны 13a, 13b, 13c, 13d для ситуации, показанной на фиг. 3, представлено символом "S".
[0041] С другой стороны, когда принимающая электрическую мощность катушка 22 отклоняется в направлении X-оси относительно подающей электрическую мощность катушки 12, как показано на фиг. 4, расстояние от секции 23 передачи сигнала до принимающей сигнал антенны 13a, 13d становится короче расстояния от секции 23 передачи сигнала до принимающей сигнал антенны 13b, 13c. Расстояние от секции 23 передачи сигнала до принимающей сигнал антенны 13a, 13d короче расстояния от секции 23 передачи сигнала до принимающей сигнал антенны 13a, 13b, 13c, 13d в состоянии, показанном на фиг. 3, так что выходное значение принимающей сигнал антенны 13a, 13d больше выходного значения S и равно S+30, например. С другой стороны, расстояние от секции 23 передачи сигнала до принимающей сигнал антенны 13b, 13c больше расстояния от секции 23 передачи сигнала до принимающей сигнал антенны 13a, 13b, 13c, 13d в состоянии, показанном на фиг. 3, так что выходное значение принимающей сигнал антенны 13b, 13c меньше выходного значения S и равно S-30, например.
[0042] Соответственно, секция 152 обнаружения местоположения обнаруживает относительное местоположение принимающей электрическую мощность катушки 22 относительно подающей электрическую мощность катушки 12, сравнивая выходные значения принимающих сигнал антенн 13a, 13b, 13c, 13d с выходным значением S в качестве эталонного и вычисляя отклонение выходного значения каждой принимающей сигнал антенны 13a, 13b, 13c, 13d.
[0043] Далее описывается процесс управления для выявления постороннего объекта, который выполняется секцией 153 выявления постороннего объекта. Как показано на фиг. 5, когда посторонний объект 40 присутствует близко к принимающей сигнал антенне 13a в аналогичном взаимном расположении катушек, что и показанное на фиг. 4, сигнал, передаваемый из секции 23 передачи сигнала принимающей сигнал антенне 13a, прерывается посторонним объектом 40, так что выходное значение принимающей сигнал антенны 13a становится меньше выходного значения принимающей сигнал антенны 13a в состоянии, показанном на фиг. 4, (S+30), и равно S - 600, например. С другой стороны, выходные значения принимающих сигнал антенн 13b, 13c, 13d равны S-30, S-30, S+30, соответственно, как в случае фиг. 4.
[0044] Секция 153 выявления постороннего объекта получает абсолютные значения разностей между выходными значениями принимающих сигнал антенн 13a, 13b, 13c, 13d и сравнивает абсолютное значение каждой разности с пороговым значением, и когда разность больше порогового значения, определяет, что между катушками присутствует посторонний объект. Пороговое значение является предварительно определенным пороговым значением идентификации постороннего объекта, используемым, чтобы определять, присутствует или нет посторонний объект. В этом варианте осуществления пороговое значение идентификации постороннего объекта задано равным 60.
[0045] В примерах, показанных на фиг. 4 и 5, выходные значение принимающих сигнал антенн 13a, 13b, 13c, 13d представлены символами a, b, c и d, соответственно. В примере, показанном на фиг. 4, абсолютное значение каждой разности вычисляется секцией 153 выявления постороннего объекта следующим образом.
[0046] |b-a|=60, |c-a| = 60, |d-a|=0,
|c-b|=0, |d-b|=60, и |d-c|=60
[0047] Секция 153 выявления постороннего объекта сравнивает абсолютное значение каждой разности с пороговым значением идентификации постороннего объекта и определяет, что каждая разность меньше или равна пороговому значению идентификации постороннего объекта (=60), и, таким образом, определяет, что посторонний объект не присутствует между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22.
[0048] С другой стороны, в примере, показанном на фиг. 5, абсолютное значение каждой разности вычисляется секцией 153 выявления постороннего объекта следующим образом.
[0049] |b-a|=570, |c-a|=570, |d-a|=630,
|c-b|=0, |d-b|=60, и |d-c|=60
[0050] Секция 153 выявления постороннего объекта сравнивает абсолютное значение каждой разности с пороговым значением идентификации постороннего объекта и определяет, что разности |b-a|, |c-a| и |d-a| больше порогового значения идентификации постороннего объекта, и, таким образом, определяет, что посторонний объект присутствует. Поскольку выходное значение a находится обычно между разностями, большими, чем пороговое значение идентификации постороннего объекта, секция 153 выявления постороннего объекта может определять, что посторонний объект присутствует близко к принимающей сигнал антенне 13a. Таким образом, секция 153 выявления постороннего объекта определяет, присутствует или нет посторонний объект между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22, а также определяет расположение постороннего объекта.
[0051] Секция 15 управления передает транспортному средству 200 посредством связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи относительное местоположение принимающей электрическую мощность катушки 22 относительно подающей электрическую мощность катушки 12, которое выявляется секцией 152 обнаружения местоположения. Кроме того, секция 15 управления передает сигнал транспортному средству 200 посредством связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи, когда посторонний объект выявляется секцией 153 выявления постороннего объекта.
[0052] После завершения управления обнаружением местоположения секция 15 управления и секция 25 управления зарядом выполняют следующее управление зарядом. Секция 25 управления зарядом вычисляет период заряда на основе информации об отклонении местоположения катушки, которая принята секцией 24 беспроводной связи. Эффективность отправки электрической мощности, подаваемой от подающей электрическую мощность катушки 12 к принимающей электрическую мощность катушке 22, зависит от коэффициента связи между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22, а коэффициент связи зависит от взаимного расположения между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22. Соответственно, секция 25 управления зарядом может вычислять электрическую мощность, принятую принимающей электрическую мощность катушкой 22, на основе электрической мощности, переданной от подающей электрическую мощность катушки 12, если распознается взаимное расположение между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22. Более того, секция 25 управления зарядом может вычислять период заряда на основе мощности заряда, соответствующей принятой электрической мощности на основе отклонения местоположения катушки, и SOC батареи 28 управляется непоказанным контроллером. Когда пользователь решает разрешить операцию заряда в течение периода заряда, вычисленного секцией 25 управления зарядом, секция 25 управления зарядом тогда передает устройству 100 подачи электричества посредством связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи сигнал, указывающий начало заряда, в ответ на действие пользователя. В ответ на сигнал секция 15 управления начинает операцию заряда. С другой стороны, когда пользователь решает не разрешать операцию заряда в течение периода заряда, вычисленного секцией 25 управления зарядом, пользователь повторяет парковку для того, чтобы уменьшать отклонение местоположения катушки и, тем самым, укорачивать период заряда. Когда батарея 28 полностью заряжена, тогда секция 25 управления зарядом передает из секции 24 беспроводной связи в секцию 14 беспроводной связи управляющий сигнал, указывающий завершение заряда, так что секция 15 управления прекращает операцию заряда на основе управляющего сигнала.
[0053] Когда секция 25 управления зарядом принимает от секции 24 беспроводной связи сигнал, указывающий выявление постороннего объекта, тогда секция 25 управления зарядом уведомляет пользователя о присутствии постороннего объекта посредством непоказанного контроллера. Пользователь может начинать заряд после устранения постороннего объекта на основе уведомления. При выявлении постороннего объекта секция 15 управления не выполняет операцию заряда.
[0054] Далее описывается процесс управления, выполняемый системой бесконтактной подачи электричества согласно настоящему варианту осуществления со ссылкой на фиг. 6-8. Фиг. 6 - это блок-схема последовательности операций, показывающая процесс управления системы бесконтактной подачи электричества согласно настоящему варианту осуществления. Фиг. 7 - это блок-схема последовательности операций, показывающая процесс управления для удаленного управления связью, показанного на фиг. 6. Фиг. 8 - это блок-схема последовательности операций, показывающая процесс управления для управления обнаружением местоположения, показанного на фиг. 6.
[0055] На этапе S1 секция 15 управления и секция 25 управления зарядом выполняет проверку системы в качестве управления инициализацией. На этапе S2 секция 15 управления и секция 25 управления зарядом выполняют удаленное управление связью.
[0056] Что касается удаленного управления связью на этапе S2, секция 25 управления зарядом получает настоящее местоположение транспортного средства 200 посредством функции GPS непоказанного контроллера, на этапе S21, как показано на фиг. 6. На этапе S22 секция 25 управления зарядом определяет, находится или нет полученное настоящее местоположение в пределах места заряда устройства 100 подачи электричества. Когда настоящее местоположение не находится в пределах места заряда, процесс управления тогда возвращается к этапу S21. Когда настоящее местоположение находится в пределах места заряда, секция 25 управления зарядом тогда запускает секцию 24 беспроводной связи на этапе S23.
[0057] На этапе S24 секция 15 управления и секция 25 управления зарядом выполняет передачу и прием сигнала между секцией 14 беспроводной связи и секцией 24 беспроводной связи для установления канала передачи данных и определяет, был или нет установлен канал передачи данных. Когда канал передачи данных не установлен, процесс управления возвращается к этапу S24, где передача и прием сигнала повторяются между секцией 14 беспроводной связи и секцией 24 беспроводной связи. Когда канал передачи данных установлен, секция 25 управления зарядом передает ID транспортного средства 200 устройству 100 подачи электричества на этапе S25. Секция 15 управления выполняет авторизацию ID, сверяя множество ID, содержащихся в сигнале, принятом секцией 14 беспроводной связи, с множеством ID, зарегистрированных в устройстве 10 подачи электричества.
[0058] Когда авторизация ID не удалась, тогда процесс управления этого варианта осуществления завершается. С другой стороны, когда авторизация ID прошла успешно, секция 25 управления зарядом передает сигналы из секции 24 беспроводной связи с интервалами предварительно определенного периода для информирования о том, что транспортное средство 200 приближается к устройству 100 подачи электричества, на этапе S26. Секция 15 управления измеряет расстояние между транспортным средством 200 и устройством 100 подачи электричества, предоставляя возможность секции 151 измерения расстояния измерять напряженность электрического поля сигнала, принятого секцией 14 беспроводной связи. Затем, на этапе S27, секция 15 управления определяет, больше или нет напряженность электрического поля принятого сигнала, чем пороговое значение приближения транспортного средства. Когда напряженность электрического поля принятого сигнала меньше или равна пороговому значению приближения транспортного средства, определяется, что приближение транспортного средства 200 к устройству 100 подачи электричества недостаточно для запуска секции 13 приема сигнала и секции 23 передачи сигнала для выявления отклонения местоположения катушки, и, таким образом, процесс управления возвращается к этапу S26. С другой стороны, когда напряженность электрического поля принятого сигнала больше порогового значения приближения транспортного средства, определяется, что приближение транспортного средства 200 к устройству 100 подачи электричества является достаточным, и, таким образом, процесс управления возвращается к этапу S3, так что удаленное управление связью завершается.
[0059] Что касается управления обнаружением местоположения на этапе S3, секция 15 управления запускает секцию 13 приема сигнала и передает из секции 14 беспроводной связи в секцию 24 беспроводной связи сигнал, указывающий начало управления обнаружением местоположения, на этапе S31, как показано на фиг. 8. На этапе S32 секция 25 управления зарядом запускает секцию 23 передачи сигнала в зависимости от сигнала, переданного на этапе S31. На этапе S33 секция 15 управления измеряет выходные значения сигналов, которые переданы из секции 23 передачи сигнала и приняты принимающими сигнал антеннами 13a, 13b, 13c, 13d секции 13 приема сигнала. На этапе S34 секция 15 управления определяет, больше или нет выходное значение каждого принятого сигнала, чем нижний предел проверки неисправности, и меньше, чем верхний предел проверки неисправности.
[0060] Когда выходные значения принятых сигналов больше, чем нижний предел, и меньше, чем верхний предел, тогда секция 15 управления вычисляет разницы между выходными значениями сигналов, принятых принимающими сигнал антеннами 13a, 13b, 13c, 13d, на этапе S35. На этапе S36 секция 15 управления инструктирует секции 153 выявления постороннего объекта определять, действительно или нет абсолютное значение каждой разности выходного значения меньше или равно пороговому значению выявления постороннего объекта. Когда абсолютное значение каждой разности выходных значений меньше или равно пороговому значению выявления постороннего объекта, секция 153 выявления постороннего объекта определяет на этапе S37, что посторонний объект не присутствует между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22. На этапе S38 секция 15 управления инструктирует секции 152 обнаружения местоположения обнаруживать относительное местоположение принимающей электрическую мощность катушки 22 относительно подающей электрическую мощность катушки 12 на основе выходных значений принимающих сигнал антенн 13a, 13b, 13c, 13d, которые измерены на этапе S33, и, тем самым, обнаруживает отклонение местоположения принимающей электрическую мощность катушки 22 от подающей электрическую мощность катушки 12 и передает транспортному средству 200 результат обнаружения, и затем управление переходит к этапу S4, так что управление обнаружением местоположения завершается.
[0061] Обращаясь обратно к этапу S36, когда абсолютные значения разностей между выходными значениями принимающих сигнал антенн 13a, 13b, 13c, 13d больше порогового значения выявления постороннего объекта, секция 153 выявления постороннего объекта определяет на этапе S361, что посторонний объект присутствует. Затем, на этапе S362, секция 15 управления передает транспортному средству 200 посредством секции 14 беспроводной связи сигнал, указывающий присутствие постороннего объекта. Секция 25 управления зарядом уведомляет пользователя о присутствии постороннего объекта на основе сигнала, принятого секцией 24 беспроводной связи. Когда посторонний объект присутствует, процесс управления этого варианта осуществления завершается без перехода к управлению зарядом на этапе S4.
[0062] Обращаясь обратно к этапу S34, когда выходные значения принимающих сигнал антенн 13a, 13b, 13c, 13d меньше, чем нижний предел, или больше, чем верхний предел, секция 15 управления определяет, что неисправность присутствует в секции 13 приема сигнала или секции 23 передачи сигнала, на этапе S341. Затем, на этапе S362, секция 15 управления передает транспортному средству 200 посредством секции 14 беспроводной связи сигнал, указывающий, что неисправность присутствует в секции 13 приема сигнала или секции 23 передачи сигнала. Секция 25 управления зарядом уведомляет пользователя о присутствии неисправности на основе сигнала, принятого секцией 24 беспроводной связи. Когда неисправность присутствует в секции 13 приема сигнала или секции 23 передачи сигнала, процесс управления этого варианта осуществления завершается без перехода к управлению зарядом на этапе S4.
[0063] Обращаясь обратно к фиг. 6, на этапе S4, секция 25 управления зарядом вычисляет период заряда на основе информации об отклонении местоположения катушки, обнаруженном секцией 152 обнаружения местоположения, и SOC батареи 28 и уведомляет пользователя о периоде заряда. Затем, в зависимости от операции пользователя, секция 25 управления зарядом передает устройству 100 подачи электричества сигнал, указывающий начало заряда. При приеме сигнала, секция 15 управления затем начинает подавать электричество от подающей электрическую мощность катушки 12 к принимающей электрическую мощность катушке 22. В начале заряда секция 15 управления останавливает секцию 13 приема сигнала, тогда как секция 25 управления зарядом останавливает секцию 23 передачи сигнала. Затем, когда батарея 28 полностью заряжена, секция 15 управления прекращает подачу электричества и завершает процесс заряда этого варианта осуществления.
[0064] Как описано выше, система бесконтактной подачи электричества согласно настоящему варианту осуществления включает в себя секцию 14 беспроводной связи и секцию 24 беспроводной связи, и секцию 23 передачи сигнала и секцию 13 приема сигнала. Система бесконтактной подачи электричества обнаруживает расстояние между транспортным средством 200 и устройством 100 подачи электричества на основе выходных сигналов секций беспроводной связи; и запускает секцию 23 передачи сигнала и секцию 13 приема сигнала и обнаруживает взаимное расположение между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22 на основе выходного сигнала секции 13 приема сигнала, когда расстояние короче порогового значения приближения транспортного средства. Это делает возможным запуск секции 13 приема сигнала и секции 23 передачи сигнала, и выходные сигналы, когда транспортное средство 200 располагается над подающей электрическую мощность катушкой 12 и, таким образом, предотвращает утечку радиоволн вследствие сигналов и пресекает помехи от радиоволн внешним периферийным устройствам. Кроме того, признак настоящего варианта осуществления, что секция 13 приема сигнала и секция 23 передачи сигнала не должны снабжаться электрической мощностью постоянно, делает возможным уменьшение утечки радиоволн из секции 13 приема сигнала и секции 23 передачи сигнала и, таким образом, пресекает воздействия на внешние периферийные устройства, такие как система интеллектуального ключа и система наблюдения за давлением воздуха в шинах.
[0065] В настоящем варианте осуществления расстояние между транспортным средством 200 и устройством 100 подачи электричества обнаруживается на основе напряженности электрического поля сигнала, принятого секцией 14 беспроводной связи. Это делает возможным предотвращение помех от сигналов внешних периферийных устройств, описанных выше, сигналу, используемому для обнаружения расстояния между транспортным средством 200 и устройством 100 подачи электричества.
[0066] В настоящем варианте осуществления, когда расстояние между транспортным средством 200 и устройством 100 подачи электричества короче порогового значения приближения транспортного средства, секция 13 приема сигнала запускается до секции 23 передачи сигнала. Это делает возможным избежание ситуаций, когда, несмотря на то, что сигнал выводится из секции 23 передачи сигнала, секция 13 приема сигнала не запущена, чтобы принимать сигнал.
[0067] В настоящем варианте осуществления устройство 100 подачи электричества включает в себя: секцию 14 беспроводной связи, которая осуществляет беспроводную связь с секцией 24 беспроводной связи; секцию 13 приема сигнала, которая осуществляет беспроводную связь с секцией 23 передачи сигнала; и секцию 15 управления. Устройство 100 подачи электричества обнаруживает расстояние между транспортным средством 200 и устройством 100 подачи электричества на основе выходного сигнала секции 24 беспроводной связи; и запускает секцию 13 приема сигнала и обнаруживает взаимное расположение между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22, когда расстояние короче порогового значения приближения транспортного средства. Это делает возможным запуск секции 13 приема сигнала и прием сигнала, когда транспортное средство 200 располагается над подающей электрическую мощность катушкой 12, и, тем самым, предотвращает утечку радиоволн вследствие сигнала и пресекает помехи от радиоволн внешним периферийным устройствам. Поскольку секция 13 приема сигнала не должна активизироваться постоянно в этом варианте осуществления, возможно уменьшать утечку радиоволн из секции 13 приема сигнала и, тем самым, пресекать воздействия на внешние периферийные устройства, такие как система интеллектуального ключа и система наблюдения за давлением воздуха в шинах.
[0068] В настоящем варианте осуществления транспортное средство 200 включает в себя: секцию 24 беспроводной связи, которая осуществляет беспроводную связь с секцией 14 беспроводной связи и служит для обнаружения расстояния между транспортным средством 200 и устройством 100 подачи электричества; секцию 23 передачи сигнала, которая осуществляет беспроводную связь с секцией 13 приема сигнала и служит для обнаружения взаимного расположения между подающей электрическую мощность катушкой 12 и принимающей электрическую мощность катушкой 22; и секцию 25 управления зарядом; при этом транспортное средство 200 запускает секцию 23 передачи сигнала, когда расстояние до устройства 100 подачи электричества короче порогового значения приближения транспортного средства. Это делает возможным запуск секции 23 передачи сигнала и прием сигнала, когда транспортное средство 200 располагается над подающей электрическую мощность катушкой 12, и, тем самым, предотвращает утечку радиоволн вследствие сигнала и пресекает помехи от радиоволн внешним периферийным устройствам. Поскольку секция 23 передачи сигнала не должна постоянно питаться в этом варианте осуществления, возможно уменьшать утечку радиоволн из секции 23 передачи сигнала и, тем самым, пресекать воздействия на внешние периферийные устройства, такие как система интеллектуального ключа и система наблюдения за давлением воздуха в шинах.
[0069] Хотя секция 13 приема сигнала состоит из четырех антенн в настоящем варианте осуществления, секция 13 приема сигнала не ограничивается этой конфигурацией, а может состоять из множества антенн, не только четырех. Секция 13 приема сигнала не должна быть предусмотрена на стороне земли, а может быть предусмотрена в транспортном средстве 200. Секция 23 передачи сигнала не должна быть предусмотрена в транспортном средстве 200, а может быть предусмотрена на стороне земли. В настоящем варианте осуществления передающая сигнал антенна секции 23 передачи сигнала и принимающие сигнал антенны 13a, 13b, 13c, 13d секции 13 приема сигнала составляют множества датчиков. Однако, множество датчиков не должно состоять из пары из секции 23 передачи сигнала и секции 13 приема сигнала, а может состоять из датчиков, предусмотренных только на одной из стороны земли и стороны транспортного средства. Например, выявление постороннего объекта и обнаружение местоположения катушки могут быть реализованы посредством предоставления множества инфракрасных датчиков на стороне земли, причем эти инфракрасные датчики излучают свет в направлении транспортного средства 200, и обработки силы отраженного инфракрасного света.
[0070] Хотя секция 153 выявления постороннего объекта выявляет посторонний объект на основе различий между выходными значениями принимающих сигнал антенн 13a, 13b, 13c, 13d в настоящем варианте осуществления, секция 153 выявления постороннего объекта может выявлять посторонний объект, обрабатывая выходные значения принимающих сигнал антенны 13a, 13b, 13c, 13d посредством умножения, сложения или вычитания и сравнивая результаты вычислений.
[0071] В настоящем варианте осуществления секция 153 выявления постороннего объекта может выполнять выявление постороннего объекта, в то время как электрическая мощность подается от подающей электрическую мощность катушки 12 к принимающей электрическую мощность катушке 22. Когда секция 153 выявления постороннего объекта выявляет посторонний объект во время подачи электрической мощности, секция 15 управления тогда прекращает передачу электричества от подающей электрическую мощность катушки 12 и уведомляет посредством беспроводной связи сторону транспортного средства 200 о событии того, что посторонний объект присутствует.
[0072] Поскольку измерение расстояния на основе связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи больше в единицах измерения, чем обнаружение отклонения местоположения катушки на основе связи между секцией 13 приема сигнала и секцией 23 передачи сигнала, цикл связи между секцией 14 беспроводной связи и секцией 24 беспроводной связи может быть установлен более длительным, чем цикл связи между секцией 13 приема сигнала и секцией 23 передачи сигнала. Объем данных, передаваемых посредством связи между секцией 13 приема сигнала и секцией 23 передачи сигнала, может быть небольшим, поскольку двухсторонняя передача управляющих сигналов не выполняется между секцией 13 приема сигнала и секцией 23 передачи сигнала как между секцией 14 беспроводной связи и секцией 24 беспроводной связи. Однако, предпочтительно выполнять контроль четности во время проверки системы для того, чтобы улучшать точность отклонения местоположения между катушками.
[0073] Секция 152 обнаружения местоположения может выполнять обнаружение местоположения катушки, в то время как электрическая мощность подается от подающей электрическую мощность катушки 12 к принимающей электрическую мощность катушке 22. Например, секция 15 управления может управляться, чтобы прекращать подачу электрической мощности в предварительно определенном периоде после выполнения подачи электрической мощности и обнаруживать местоположение катушек посредством секции 152 обнаружения местоположения, в то время как подача электрической мощности прекращена, и после обнаружения возобновлять подачу электрической мощности. Это делает возможным подтверждение того, происходит или нет отклонение положения катушки во время подачи электрической мощности. Хотя расстояние между транспортным средством 200 и устройством 100 подачи электричества измеряется на основе силы сигнала, принятого секцией 14 беспроводной связи, оно может быть измерено на основе временной разности относительно принятого сигнала или т.п. В качестве средства связи для удаленной связи для измерения расстояния может быть предусмотрен датчик, который измеряет непосредственно расстояние между транспортным средством 200 и устройством 100 подачи электричества.
[0074] Одна из подающей электрическую мощность катушки 12 и принимающей электрическую мощность катушки 22 соответствует первой катушке настоящего изобретения, тогда как другая катушка соответствует второй катушке настоящего изобретения. Секция 14 беспроводной связи и секция 24 беспроводной связи соответствуют первому средству связи настоящего изобретения. Секция 13 приема сигнала и секция 23 передачи сигнала соответствуют второму средству связи настоящего изобретения. Секция 15 управления и секция 25 управления зарядом соответствуют средству управления настоящего изобретения.

Изобретение относится к бесконтактной подаче электрической мощности к транспортному средству. Система бесконтактной подачи электричества посредством магнитной связи между катушкой в транспортном средстве и катушкой в устройстве подачи электричества содержит средство беспроводной связи между транспортным средством и устройством подачи электричества на первой частоте; средство беспроводной связи между транспортным средством и устройством подачи электричества на второй частоте, которая отличается от первой частоты. Также система содержит средство управления первым и вторым средствами связи. Средство управления обнаруживает расстояние между транспортным средством и устройством подачи электричества посредством первого средства связи; и осуществляет беспроводную связь между транспортным средством и устройством подачи электричества посредством второго средства связи, когда расстояние между транспортным средством и устройством подачи электричества короче предварительно определенного расстояния. Исключаются радиопомехи от окружающих беспроводных устройств. 4 н. и 7 з.п. ф-лы, 8 ил.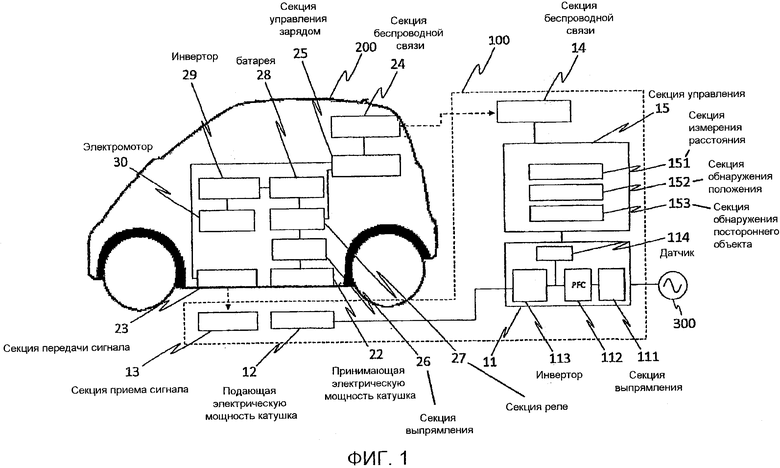
1. Система бесконтактной подачи электричества, которая передает или принимает электричество бесконтактным образом, по меньшей мере, посредством магнитной связи между первой катушкой и второй катушкой, при этом первая катушка предусмотрена в транспортном средстве, а вторая катушка предусмотрена в устройстве подачи электричества, система бесконтактной подачи электричества содержит:
первое средство связи, которое осуществляет беспроводную связь между транспортным средством и устройством подачи электричества на первой частоте связи;
второе средство связи, которое осуществляет беспроводную связь между транспортным средством и устройством подачи электричества на второй частоте связи, которая отличается от первой частоты связи; и
средство управления, которое управляет первым средством связи и вторым средством связи;
при этом средство управления обнаруживает расстояние между транспортным средством и устройством подачи электричества посредством первого средства связи; и осуществляет беспроводную связь между транспортным средством и устройством подачи электричества посредством второго средства связи, когда расстояние между транспортным средством и устройством подачи электричества короче предварительно определенного расстояния.
2. Система бесконтактной подачи электричества по п. 1, в которой средство управления обнаруживает расстояние между
транспортным средством и устройством подачи электричества на основе выходного сигнала первого средства связи; и запускает второе средство связи и обнаруживает взаимное расположение между первой катушкой и второй катушкой на основе выходного сигнала второго средства связи, когда расстояние между транспортным средством и устройством подачи электричества становится короче предварительно определенного расстояния.
3. Система бесконтактной подачи электричества по п. 2, в которой средство управления обнаруживает расстояние между транспортным средством и устройством подачи электричества на основе напряженности электрического поля сигнала, принятого первым средством связи.
4. Система бесконтактной подачи электричества по п. 2, в которой:
второе средство связи включает в себя секцию передачи сигнала и секцию приема сигнала; и
средство управления запускает секцию приема сигнала до секции передачи сигнала, когда расстояние между транспортным средством и устройством подачи электричества становится короче предварительно определенного расстояния.
5. Система бесконтактной подачи электричества по п. 1, в которой второе средство связи запускается, когда транспортное средство находится в местоположении, перекрывающем вторую катушку.
6. Система бесконтактной подачи электричества по п. 1, в которой второе средство связи включает в себя множество принимающих сигнал антенн для обнаружения взаимного расположения
между первой катушкой и второй катушкой.
7. Устройство бесконтактной подачи электричества, содержащее:
вторую катушку, которая передает или принимает электричество к или от первой катушки бесконтактным образом, по меньшей мере, посредством магнитной связи между ними, при этом первая катушка предусмотрена в транспортном средстве;
первое средство связи, которое осуществляет беспроводную связь с транспортным средством на первой частоте связи;
второе средство связи, которое осуществляет беспроводную связь с транспортным средством на второй частоте связи, которая отличается от первой частоты связи; и
средство управления, которое управляет первым средством связи и вторым средством связи;
при этом средство управления обнаруживает расстояние до транспортного средства посредством первого средства связи; и осуществляет беспроводную связь с транспортным средством посредством второго средства связи, когда расстояние до транспортного средства короче предварительно определенного расстояния.
8. Устройство бесконтактной подачи электричества по п. 7, в котором средство управления обнаруживает расстояние до транспортного средства на основе выходного сигнала первого средства связи; и запускает второе средство связи и обнаруживает взаимное расположение между первой катушкой и второй катушкой на основе выходного сигнала второго средства связи, когда расстояние до транспортного средства становится короче
предварительно определенного расстояния.
9. Транспортное средство, содержащее:
первую катушку, которая передает или принимает электричество к или от второй катушки бесконтактным образом, по меньшей мере, посредством магнитной связи между ними, при этом вторая катушка предусмотрена в устройстве подачи электричества;
первое средство связи, которое осуществляет беспроводную связь с устройством подачи электричества на первой частоте связи;
второе средство связи, которое осуществляет беспроводную связь с устройством подачи электричества на второй частоте связи, которая отличается от первой частоты связи; и
средство управления, которое управляет первым средством связи и вторым средством связи;
при этом средство управления обнаруживает расстояние до устройства подачи электричества посредством первого средства связи; и осуществляет беспроводную связь с устройством подачи электричества посредством второго средства связи,
когда расстояние до устройства подачи электричества короче предварительно определенного расстояния.
10. Транспортное средство по п. 9, в котором средство управления обнаруживает расстояние до устройства подачи электричества на основе выходного сигнала первого средства связи; и запускает второе средство связи и обнаруживает взаимное расположение между первой катушкой и второй катушкой на основе выходного сигнала второго средства связи, когда расстояние до устройства подачи электричества становится короче этого предварительно определенного расстояния.
11. Система бесконтактной подачи электричества, которая
посылает или принимает электричество бесконтактным образом, по меньшей мере, посредством магнитной связи между первой катушкой и второй катушкой, при этом первая катушка предусмотрена в транспортном средстве, а вторая катушка предусмотрена в устройстве подачи электричества, упомянутая система бесконтактной подачи электричества содержит:
первое средство связи, которое осуществляет беспроводную связь между транспортным средством и устройством подачи электричества на первой частоте;
средство посылки и приема электромагнитных волн, которое выполняет посылку и прием электромагнитных волн между транспортным средством и устройством подачи электричества на второй частоте, которая отличается от первой частоты;
средство управления, которое управляет первым средством связи и средством посылки и приема электромагнитных волн;
при этом средство управления обнаруживает расстояние между транспортным средством и устройством подачи электричества посредством первого средства связи; и осуществляет посылку и прием электромагнитных волн между транспортным средством и устройством подачи электричества посредством средства посылки и приема электромагнитных волн, когда расстояние между транспортным средством и устройством подачи электричества короче предварительно определенного расстояния.
| WO 2010052785 A1, 14.05.2010 | |||
| JP 2010226945 A, 07.10.2010 | |||
| JP 2010051089 A, 04.03.2010 | |||
| JP 2003348774 A, 05.12.2003 |

