Область техники
Изобретение относится к системе бесконтактной подачи мощности, допускающей подачу электрической мощности в движущееся транспортное средство, и к устройству приема мощности, предоставленному в транспортном средстве.
Уровень техники
В качестве системы предшествующего уровня техники, например, предложена система для подачи электрической мощности бесконтактным способом из катушки для передачи мощности, предоставленной на полосе движения, в катушку для приема мощности транспортного средства, причем система подает электрическую мощность в движущееся транспортное средство посредством активации другой системы, такой как контроллер схемы источника мощности, в случае, если транспортное средство обнаруживается (см. публикацию не прошедшей экспертизу заявки на патент Японии № 2015-027149 (JP 2015-027149 А)).
Хотя она представляет собой технологию для подачи электрической мощности бесконтактным способом в припаркованное транспортное средство, предложена система, допускающая соответствие каждому из множества типов катушек для катушки для приема мощности (см. публикацию не прошедшей экспертизу заявки на патент Японии № 2015-116084 (JP 2015-116084 А)).
Сущность изобретения
В системе бесконтактной подачи мощности, когда транспортное средство (т.е. катушка для приема мощности) не существует, подача мощности в катушку для передачи мощности зачастую отсекается с учетом влияния магнитного поля утечки, например, на человеческое тело и т.п. По этой причине, например, как указано в технологии, описанной в JP 2015-027149 А, подача мощности в катушку для передачи мощности и отсечка подачи мощности переключаются на основе результата обнаружения транспортного средства.
Определенное количество времени (например, в диапазоне от нескольких десятков миллисекунд до нескольких сотен миллисекунд) необходимо от состояния, в котором подача мощности в катушку для передачи мощности отсечена, до состояния, в котором катушка для передачи мощности может подавать электрическую мощность бесконтактным способом в катушку для приема мощности. Позиция транспортного средства, которое движется, изменяется даже в период, связанный с изменением состояния, описанным выше. Чем выше скорость транспортного средства, тем больше становится величина изменения позиции, описанная выше.
В технологии, описанной в JP 2015-027149 А, в случае, если транспортное средство въезжает в тракт подачи мощности, выполняется определение того, что транспортное средство обнаруживается, и контроллер схемы источника мощности и т.п. активируется. По этой причине, в зависимости от скорости транспортного средства, имеется вероятность того, что транспортное средство проезжает тракт подачи мощности, когда контроллер схемы источника мощности и т.п. активируется.
Изобретение предоставляет систему бесконтактной подачи мощности и устройство приема мощности, в которых даже в случае, если транспортное средство движется относительно быстро, можно надлежащим образом подавать электрическую мощность в транспортное средство и подавлять возникновение магнитного поля утечки.
Первый аспект изобретения относится к системе бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге. Система бесконтактной подачи мощности включает в себя: первый модуль оценки, выполненный с возможностью оценивать будущую позицию транспортного средства на основе скорости транспортного средства; и модуль указания, выполненный с возможностью указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, на основе оцененной будущей позиции.
В системе бесконтактной подачи мощности согласно первому аспекту изобретения, первый модуль оценки может быть выполнен с возможностью оценивать прогнозированный курс, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость. Модуль указания может быть выполнен с возможностью указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, на основе оцененного прогнозированного курса.
Система бесконтактной подачи мощности согласно первому аспекту изобретения дополнительно может включать в себя второй модуль оценки, выполненный с возможностью оценивать позицию транспортного средства на дороге на основе позиции в направлении, в котором идет дорога, для одной катушки для передачи мощности, которая подает электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, и величины электрической мощности, подаваемой из одной катушки для передачи мощности в катушку для приема мощности. Первый модуль оценки может оценивать будущую позицию на основе позиции, оцененной посредством второго модуля оценки, в дополнение к скорости.
Система бесконтактной подачи мощности согласно первому аспекту изобретения дополнительно может включать в себя модуль выбора, выполненный с возможностью выбирать то, следует или нет инструктировать указанной катушке для передачи мощности фактически находиться в активированном состоянии, на основе сигнала, указывающего функциональное намерение водителя транспортного средства.
Система бесконтактной подачи мощности согласно первому аспекту изобретения дополнительно может включать в себя контроллер катушки, выполненный с возможностью управлять каждой из катушек для передачи мощности таким образом, что каждая из катушек для передачи мощности переходит в активированное состояние, и управлять каждой из катушек для передачи мощности таким образом, что каждая из катушек для передачи мощности переходит в состояние готовности, которое представляет собой состояние, в котором каждая из катушек для передачи мощности не подает электрическую мощность в катушку для приема мощности, после того, как каждая из катушек для передачи мощности переходит в активированное состояние. В случае, если имеется другое транспортное средство, которое отличается от транспортного средства и которое движется позади транспортного средства по дороге, контроллер катушки может выбирать то, следует или нет продлевать период, в который катушка для передачи мощности, которая переходит в активированное состояние вследствие транспортного средства, поддерживает активированное состояние, на основе позиции другого транспортного средства.
Второй аспект изобретения относится к устройству приема мощности, которое монтируется на транспортном средстве в системе бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге. Устройство приема мощности включает в себя: первый модуль оценки, выполненный с возможностью оценивать будущую позицию транспортного средства на основе скорости транспортного средства; и модуль указания, выполненный с возможностью указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, на основе оцененной будущей позиции.
В устройстве приема мощности согласно второму аспекту изобретения, первый модуль оценки может быть выполнен с возможностью оценивать прогнозированный курс, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость. Модуль указания может быть выполнен с возможностью указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, на основе оцененного прогнозированного курса.
Устройство приема мощности согласно второму аспекту изобретения дополнительно может включать в себя второй модуль оценки, выполненный с возможностью оценивать позицию транспортного средства на дороге на основе позиции в направлении, в котором идет дорога, для одной катушки для передачи мощности, которая подает электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, и величины электрической мощности, подаваемой из одной катушки для передачи мощности в катушку для приема мощности. Первый модуль оценки может оценивать будущую позицию на основе позиции, оцененной посредством второго модуля оценки, в дополнение к скорости.
Устройство приема мощности согласно второму аспекту изобретения дополнительно может включать в себя модуль выбора, выполненный с возможностью выбирать то, следует или нет инструктировать указанной катушке для передачи мощности фактически находиться в активированном состоянии, на основе сигнала, указывающего функциональное намерение водителя транспортного средства.
Краткое описание чертежей
Ниже описываются признаки, преимущества и техническая и промышленная значимость примерных вариантов осуществления изобретения со ссылкой на прилагаемые чертежи, на которых аналогичные номера обозначают аналогичные элементы, и на которых:
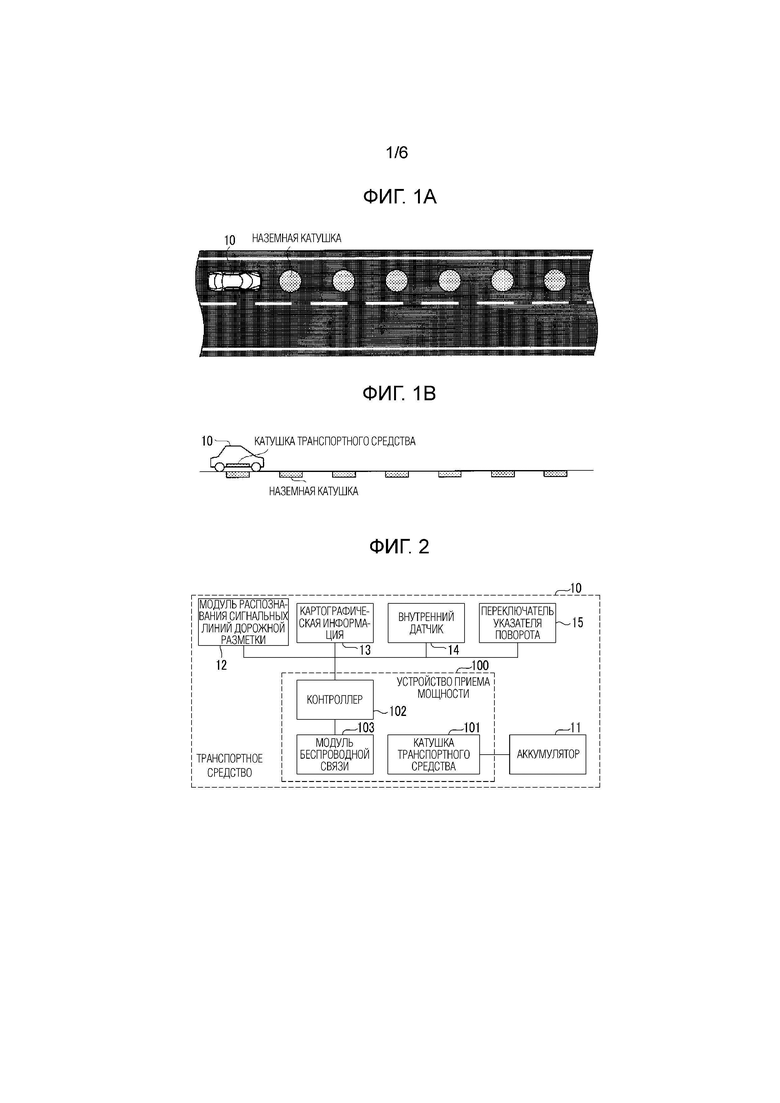
Фиг. 1A является схемой, показывающей общее представление системы бесконтактной подачи мощности согласно первому варианту осуществления;
Фиг. 1B является схемой, показывающей общее представление системы бесконтактной подачи мощности согласно первому варианту осуществления;
Фиг. 2 является блок-схемой, показывающей конфигурацию устройства приема мощности согласно первому варианту осуществления;
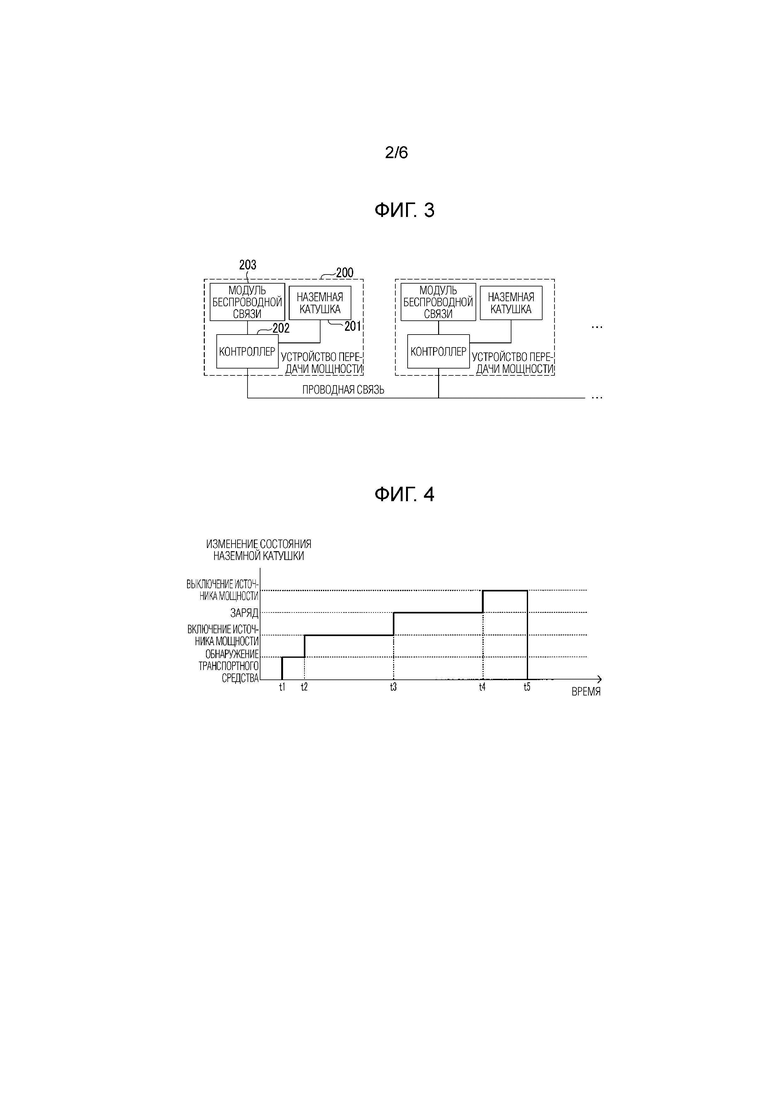
Фиг. 3 является блок-схемой, показывающей конфигурацию устройства передачи мощности согласно первому варианту осуществления;
Фиг. 4 является графиком, показывающим пример перехода состояния наземной катушки согласно первому варианту осуществления;
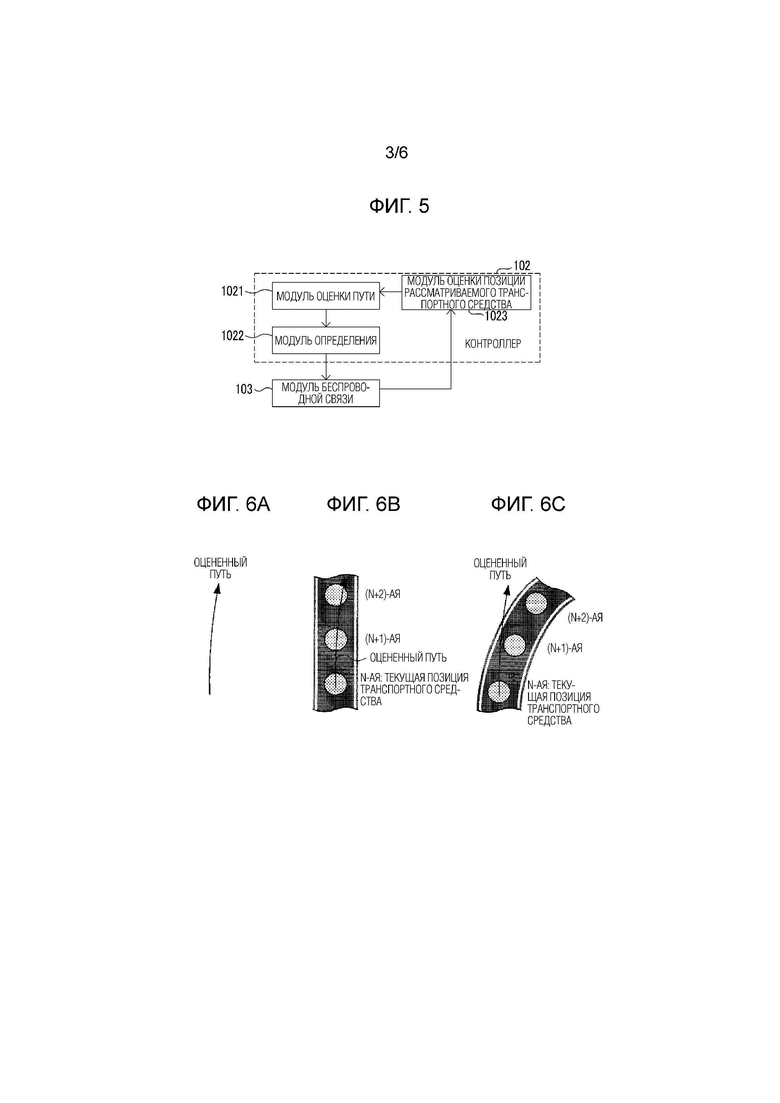
Фиг. 5 является блок-схемой, показывающей конфигурацию контроллера устройства приема мощности согласно первому варианту осуществления;
Фиг. 6A является концептуальной схемой, показывающей пример принципа обработки определения согласно первому варианту осуществления;
Фиг. 6B является концептуальной схемой, показывающей пример принципа обработки определения согласно первому варианту осуществления;
Фиг. 6C является концептуальной схемой, показывающей пример принципа обработки определения согласно первому варианту осуществления;
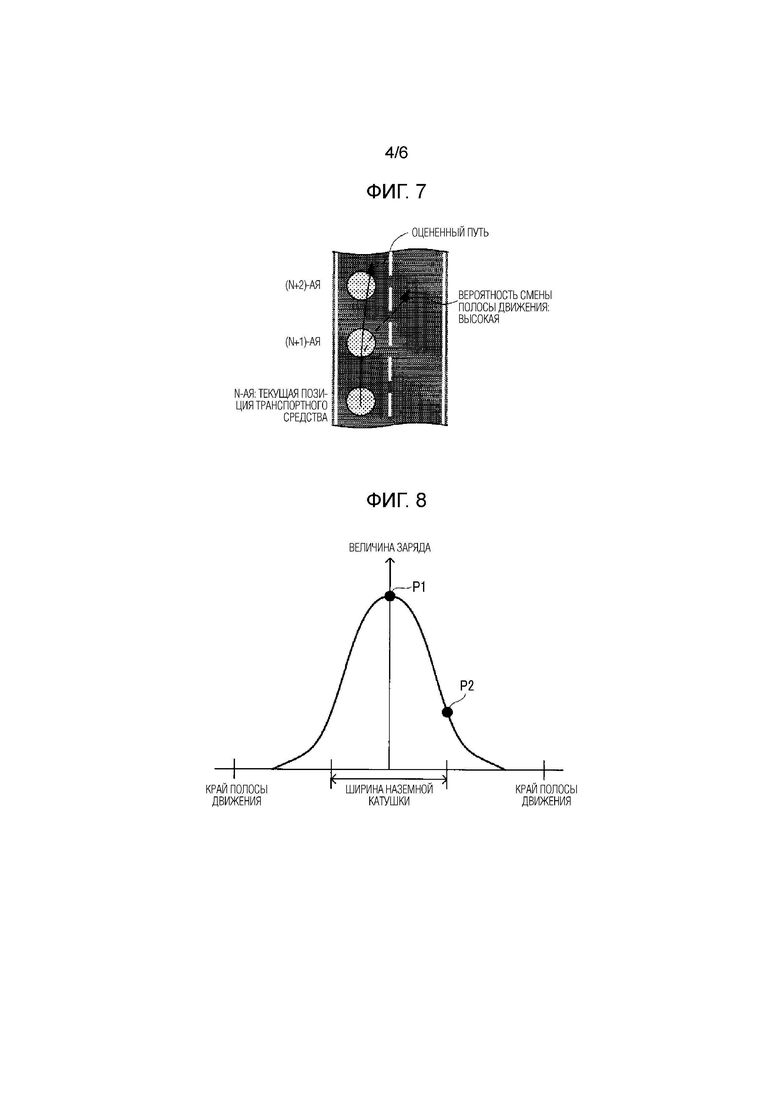
Фиг. 7 является концептуальной схемой, показывающей другой пример принципа обработки определения согласно первому варианту осуществления;
Фиг. 8 является графиком, показывающим пример изменения величины заряда в направлении ширины дороги;
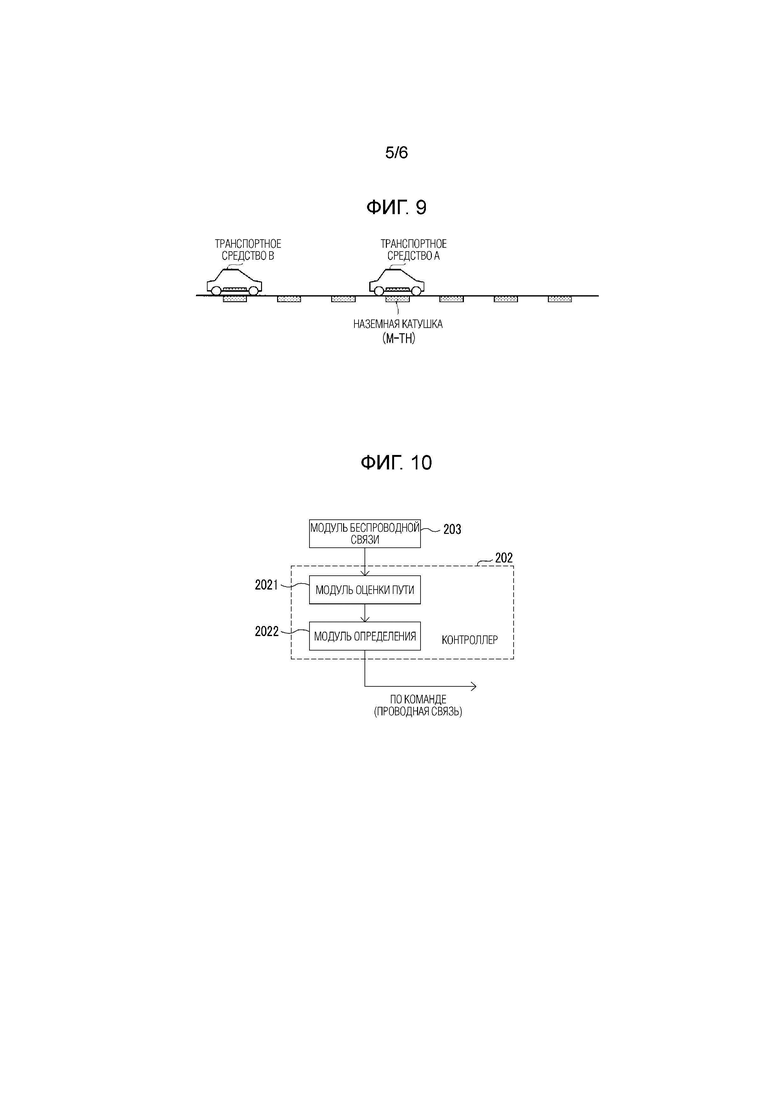
Фиг. 9 является схемой, показывающей пример ситуации при движении транспортного средства;
Фиг. 10 является блок-схемой, показывающей конфигурацию контроллера устройства передачи мощности согласно второму варианту осуществления; и
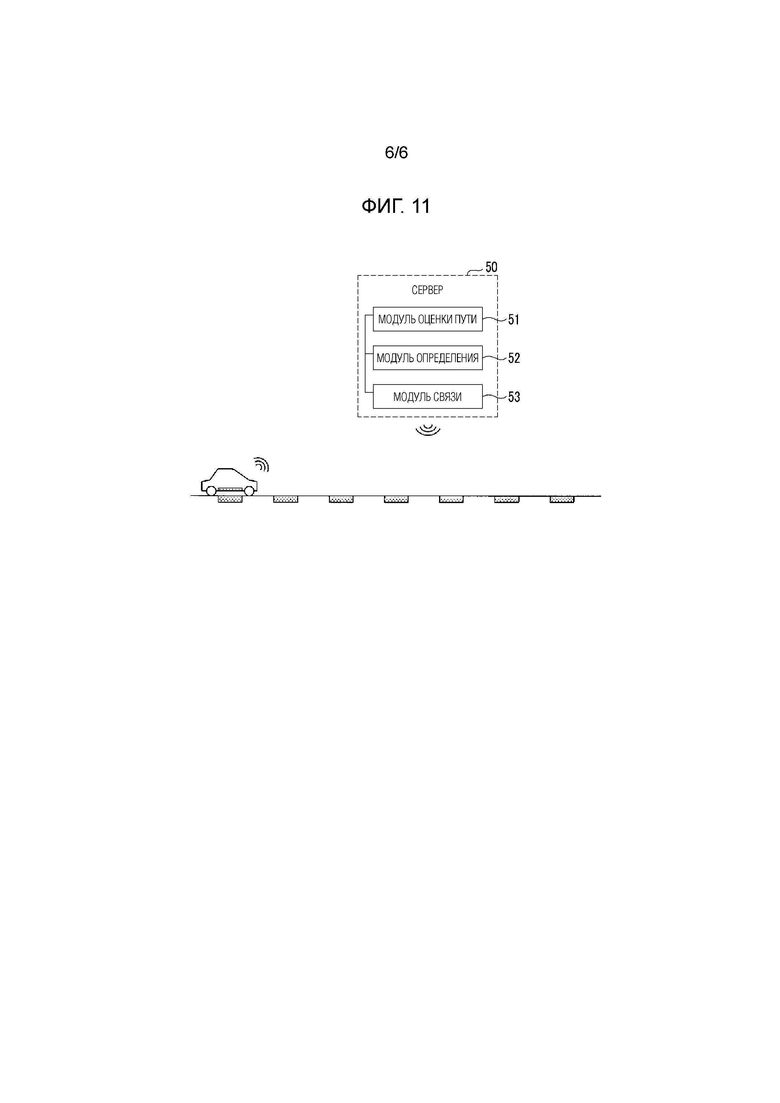
Фиг. 11 является схемой, показывающей общее представление системы бесконтактной подачи мощности согласно третьему варианту осуществления.
Подробное описание вариантов осуществления изобретения
Ниже описываются варианты осуществления, связанные с системой бесконтактной подачи мощности, на основе чертежей.
Ниже описывается первый вариант осуществления, связанный с системой бесконтактной подачи мощности, со ссылкой на фиг. 1A-9.
Ниже описывается конфигурация системы бесконтактной подачи мощности согласно первому варианту осуществления со ссылкой на фиг. 1A-3. Фиг. 1A и фиг. 1B являются схемами, показывающими общее представление системы бесконтактной подачи мощности согласно первому варианту осуществления. Фиг. 2 является блок-схемой, показывающей конфигурацию устройства приема мощности согласно первому варианту осуществления. Фиг. 3 является блок-схемой, показывающей конфигурацию устройства передачи мощности согласно первому варианту осуществления.
Система бесконтактной подачи мощности включает в себя множество наземных катушек, размещаемых вдоль направления, в котором идет дорога, как показано на фиг. 1A и фиг. 1B. Катушка транспортного средства монтируется на транспортном средстве 10, соответствующем системе бесконтактной подачи мощности. В случае, если транспортное средство 10 движется по дороге (или полосе движения), на которой размещаются наземные катушки, электрическая мощность подается бесконтактным способом из наземной катушки, которая обращена к катушке транспортного средства, в катушку транспортного средства.
Ниже описывается транспортное средство 10 со ссылкой на фиг. 2. На фиг. 2, транспортное средство 10 выполнено с возможностью включать в себя аккумулятор 11, модуль 12 распознавания сигнальных линий дорожной разметки, картографическую информацию 13, внутренний датчик 14, переключатель 15 указателя поворота и устройство 100 приема мощности. Устройство 100 приема мощности выполнено с возможностью включать в себя катушку 101 транспортного средства, контроллер 102 и модуль 103 беспроводной связи.
Аккумулятор 11 соединяется с катушкой 101 транспортного средства. Аккумулятор 11 выполнен с возможностью быть заряжаемым посредством электрической мощности из катушки 101 транспортного средства. Модуль 12 распознавания сигнальных линий дорожной разметки распознает сигнальную линию дорожной разметки, нарисованную по дороге, по которой движется транспортное средство 10, на основе захваченного изображения дороги впереди транспортного средства 10. Поскольку существующая технология может применяться к технологии, связанной с распознаванием сигнальных линий дорожной разметки, ее подробное описание опускается. Картографическая информация 13 включает в себя, по меньшей мере, информацию, связанную с формой дороги (например, кривизну кривой и т.п.), и информацию, указывающую позицию каждой из наземных катушек. Внутренний датчик 14 включает в себя, например, датчик скорости, датчик ускорения, датчик скорости относительно вертикальной оси, датчик угла поворота при рулении и т.п. Контроллер 102 устройства 100 приема мощности осуществляет управление, связанное с зарядом аккумулятора 11 через катушку 101 транспортного средства (ниже описываются подробности означенного). Модуль 103 беспроводной связи выполнен с возможностью допускать выполнение взаимной беспроводной связи с модулем 203 беспроводной связи устройства 200 передачи мощности (описано ниже).
Ниже описывается устройство передачи мощности, которое содержит наземную катушку, со ссылкой на фиг. 3. На фиг. 3, устройство 200 передачи мощности выполнено с возможностью включать в себя наземную катушку 201, контроллер 202 и модуль 203 беспроводной связи. Устройство 200 передачи мощности выполнено с возможностью допускать выполнение проводной связи с другим устройством 200 передачи мощности посредством такой линии связи, как, например, электрический провод или оптоволокно. В первом варианте осуществления, уникальный номер назначается каждому из устройств 200 передачи мощности таким образом, что каждое из устройств 200 передачи мощности может идентифицироваться.
Здесь, описывается переход состояния наземной катушки 201 со ссылкой на фиг. 4. Фиг. 4 является графиком, показывающим пример перехода состояния наземной катушки согласно первому варианту осуществления. Когда транспортное средство 10 обнаруживается (в частности, например, когда модуль 203 беспроводной связи (следует обратиться к фиг. 3) принимает сигнал, передаваемый из модуля 103 беспроводной связи (следует обратиться к фиг. 2)) во время t1 на фиг. 4, во время t2, контроллер 202 начинает включение источника мощности (не показан), который подает электрическую мощность в наземную катушку 201. После этого, во время t3 (в это время, транспортное средство 10 расположено над наземной катушкой 201), контроллер 202 управляет наземной катушкой 201 (строго говоря, схемой передачи мощности, которая включает в себя наземную катушку 201), с тем чтобы подавать электрическую мощность в катушку 101 транспортного средства. Как результат, аккумулятор 11 транспортного средства 10 заряжается. Когда период подачи мощности (заряда) завершается во время t4, контроллер 202 начинает выключение источника мощности, который подает электрическую мощность в наземную катушку 201. Когда выключение источника мощности завершается во время t5, состояние наземной катушки 201 возвращается в состояние перед обнаружением транспортных средств. Период подачи мощности изменяется согласно скорости транспортного средства 10.
Этап от времени t2 до времени t3 на фиг. 4 в дальнейшем надлежащим образом упоминается в качестве "этапа включения источника мощности". Этап от времени t3 до времени t4 на фиг. 4 в дальнейшем надлежащим образом упоминается в качестве "этапа заряда". Этап от времени t4 до времени t5 на фиг. 4 в дальнейшем надлежащим образом упоминается в качестве "этапа выключения источника мощности".
Ниже описывается работа системы бесконтактной подачи мощности, сконфигурированной так, как описано выше, со ссылкой на фиг. 5-9. Фиг. 5 является блок-схемой, показывающей конфигурацию контроллера устройства приема мощности согласно первому варианту осуществления. Фиг. 6A-6C являются концептуальными схемами, показывающими пример принципа обработки определения согласно первому варианту осуществления. Фиг. 7 является концептуальной схемой, показывающей другой пример принципа обработки определения согласно первому варианту осуществления. Фиг. 8 является графиком, показывающим пример изменения величины заряда в направлении ширины дороги. Фиг. 9 является схемой, показывающей пример ситуации при движении транспортного средства.
В системе бесконтактной подачи мощности согласно первому варианту осуществления, сигнал, указывающий команду в устройство 200 передачи мощности, передается из устройства 100 приема мощности, предоставленного в транспортном средстве 10. Устройство 200 передачи мощности подает электрическую мощность из наземной катушки 201 в катушку 101 транспортного средства в ответ на сигнал.
Контроллер 102 устройства 100 приема мощности выполнен с возможностью включать в себя модуль 1021 оценки пути, модуль 1022 определения и модуль 1023 оценки позиции рассматриваемого транспортного средства, в качестве блоков обработки, которые логически реализованы, или схем обработки, которые физически реализованы, в контроллере 102, как показано на фиг. 5.
Далее поясняется обработка оценки пути. Модуль 1021 оценки пути оценивает путь (другими словами, прогнозированный курс) транспортного средства 10 от текущего времени до предварительно определенного времени позднее (например, через несколько секунд), который представляет собой набор будущих позиций транспортного средства 10, на основе вывода (в частности, скорости, ускорения/замедления транспортного средства, скорости относительно вертикальной оси или угла поворота при рулении) внутреннего датчика 14 и информации позиции, указывающей текущую позицию транспортного средства 10. Поскольку существующая технология может применяться к способу оценки пути, ее подробное описание опускается. Относительно информации позиции, следует обратиться к "обработке оценки позиции рассматриваемого транспортного средства", которая описывается ниже.
Далее поясняется обработка определения. Модуль 1022 определения определяет (выбирает) устройство 200 передачи мощности, которое должно находиться в состоянии способности подавать электрическую мощность из наземной катушки 201 в катушку 101 транспортного средства (в дальнейшем надлежащим образом называемого "активированным состоянием"), на основе пути, оцененного посредством модуля 1021 оценки пути. Здесь, "активированное состояние" означает состояние, в котором источник мощности включается посредством "этапа включения источника мощности", описанного выше.
В частности, сначала модуль 1022 определения получает информацию дорожных маршрутов, указывающую форму дороги, по которой в данный момент движется транспортное средство 10, на основе результата распознавания сигнальных линий дорожной разметки посредством модуля 12 распознавания сигнальных линий дорожной разметки и картографической информации 13. В случае, если наземная катушка 201 присутствует рядом с транспортным средством 10, информация, указывающая позицию наземной катушки 201, также включается в информацию дорожных маршрутов.
Модуль 1022 определения сравнивает путь, оцененный посредством модуля 1021 оценки пути, с информацией дорожных маршрутов. Например, предполагается, что оцененный путь представляет собой путь, как показано на фиг. 6A. Как показано на фиг. 6B, в случае, если форма дороги, указываемая посредством информации дорожных маршрутов, представляет собой прямую дорогу, модуль 1022 определения определяет то, что оцененный путь представляет собой путь вдоль формы дороги.
Как показано на фиг. 6B, когда предполагается, что текущая позиция транспортного средства 10 представляет собой позицию N-ой наземной катушки 201, модуль 1022 определения указывает устройства 200 передачи мощности, которые, соответственно, содержат (N+1)-ую и (N+2)-ую наземные катушки 201, перекрывающие оцененный путь, в качестве возможных вариантов для устройства 200 передачи мощности, которое должно находиться в активированном состоянии. В это время, модуль 1022 определения указывает возможные варианты с учетом, например, ошибки оцененного пути, вызываемой посредством ошибки каждого из информации позиции и вывода внутреннего датчика 14.
С другой стороны, как показано на фиг. 6C, в случае, если форма дороги, указываемая посредством информации дорожных маршрутов, представляет собой искривленную дорогу, модуль 1022 определения определяет то, что оцененный путь не представляет собой путь вдоль формы дороги. В случае, описанном выше, устройство 200 передачи мощности, которое должно находиться в активированном состоянии, не определяется на основе пути, оцененного в это время.
После того, как возможные варианты для устройства 200 передачи мощности, которое должно находиться в активированном состоянии, указываются, модуль 1022 определения определяет то, имеется или нет вероятность того, что фактический курс транспортного средства 10 отклоняется от оцененного пути, например, на основе включенного/выключенного состояния переключателя 15 указателя поворота.
В случае, если переключатель 15 указателя поворота находится во включенном состоянии, например, как показано на фиг. 7, вероятность того, что операция, связанная со сменой полосы движения, выполняется водителем транспортного средства 10, является относительно высокой. В случае, описанном выше, модуль 1022 определения оценивает позицию, в которой начинается смена полосы движения, например, на основе скорости транспортного средства, прогнозного времени после того, как переключатель 15 указателя поворота переходит во включенное состояние, и до тех пор, пока операция, связанная со сменой полосы движения, фактически не начинается, и т.п. Модуль 1022 определения определяет устройство 200 передачи мощности, которое фактически должно находиться в активированном состоянии, из числа возможных вариантов для устройства 200 передачи мощности, которые должны находиться в активированном состоянии, на основе оцененной позиции. В примере, показанном на фиг. 7, модуль 1022 определения определяет то, что устройство 200 передачи мощности, имеющее (N+1)-ую наземную катушку 201, должно находиться в активированном состоянии.
С другой стороны, в случае, если переключатель 15 указателя поворота находится в отключенном состоянии, вероятность того, что операция, связанная со сменой полосы движения, выполняется водителем транспортного средства 10, является относительно низкой. В случае, описанном выше, модуль 1022 определения определяет то, что вероятность того, что транспортное средство 10 движется по оцененному пути, является относительно высокой, и определяет устройство 200 передачи мощности, которое фактически должно находиться в активированном состоянии, из числа возможных вариантов для устройства 200 передачи мощности, которые должны находиться в активированном состоянии. В примере, показанном на фиг. 7, модуль 1022 определения определяет то, что устройства 200 передачи мощности, имеющие (N+1)-ую и (N+2)-ую наземную катушку 201, должны находиться в активированном состоянии.
Модуль 1022 определения передает сигнал включения наземной катушки, который представляет собой сигнал, указывающий команду, чтобы выполнять бесконтактную подачу мощности в транспортное средство 10, в устройство 200 передачи мощности, которое фактически должно находиться в активированном состоянии, через модуль 103 беспроводной связи. Типично, сигнал включения наземной катушки принимается посредством модуля 203 беспроводной связи устройства 200 передачи мощности, ближайшего к транспортному средству 10, и передается в устройство 200 передачи мощности, которое фактически должно находиться в активированном состоянии, посредством проводной связи между устройствами 200 передачи мощности.
Модуль 1022 определения может определять то, имеется или нет вероятность того, что фактический курс транспортного средства 10 отклоняется от оцененного пути, например, на основе (i) величины изменения ускорения или угла поворота при рулении на основе вывода внутреннего датчика 14 или (ii) величины изменения расстояния между транспортными средствами между транспортным средством 10 и транспортным средством, которое движется непосредственно впереди транспортного средства 10, на основе вывода датчика распознавания периферии (не показан), в дополнение или вместо включенного/выключенного состояния переключателя 15 указателя поворота.
В случае, если величина изменения ускорения является относительно большой, имеется вероятность того, что фактическая позиция транспортного средства 10 отклоняется относительно значительно в направлении спереди назад транспортного средства 10 от будущей позиции транспортного средства 10, что показано посредством оцененного пути. В случае, если величина изменения угла поворота при рулении является относительно большой, имеется вероятность того, что фактическая позиция транспортного средства 10 отклоняется относительно значительно в направлении ширины (т.е. в направлении справа налево) транспортного средства 10 от будущей позиции транспортного средства 10, что показано посредством оцененного пути. В случае, если расстояние между транспортными средствами становится короче, вероятность того, что смена полосы движения выполняется для того, чтобы избежать транспортного средства, которое движется непосредственно впереди транспортного средства 10, является относительно высокой.
Далее описывается обработка оценки позиции рассматриваемого транспортного средства. Электрическая мощность, которая подается из наземной катушки 201 в катушку 101 транспортного средства, изменяется согласно величине отклонения между катушкой 101 транспортного средства и наземной катушки 201 в направлении ширины транспортного средства 10 при просмотре сверху транспортного средства 10 при виде сверху. Например, на фиг. 8, в случае, если центр катушки 101 транспортного средства находится в позиции P1, электрическая мощность (на фиг. 8, "величина заряда"), которая подается из наземной катушки 201 в катушку 101 транспортного средства, становится максимальной. С другой стороны, в случае, если центр катушки 101 транспортного средства находится в позиции P2, электрическая мощность, которая подается из наземной катушки 201 в катушку 101 транспортного средства, становится существенно меньшей, чем в случае, если центр катушки 101 транспортного средства находится в позиции P1.
Расстояние в направлении высоты между наземной катушкой 201 и катушкой 101 транспортного средства известно из высоты транспортного средства для транспортного средства 10. Во время бесконтактной подачи мощности из наземной катушки 201 в катушку 101 транспортного средства, электрическая мощность, которая подается в наземную катушку 201, типично является постоянной. По этой причине, взаимосвязь между центральной позицией катушки 101 транспортного средства в направлении ширины дороги и величиной электрической мощности, которая подается в катушку 101 транспортного средства, может получаться относительно легко.
Модуль 1023 оценки позиции рассматриваемого транспортного средства оценивает позицию транспортного средства 10 в направлении ширины дороги, на основе взаимосвязи, описанной выше, и величины электрической мощности, которая подается в катушку 101 транспортного средства (другими словами, величины электрической мощности, принимаемой посредством катушки 101 транспортного средства). Модуль 1023 оценки позиции рассматриваемого транспортного средства оценивает позицию транспортного средства 10 в направлении, в котором идет дорога, на основе номера, выделяемого устройству 200 передачи мощности, которое подает электрическую мощность в катушку 101 транспортного средства, и информации, указывающей позицию наземной катушки 201, которая включена в картографическую информацию 13.
Модуль 1023 оценки позиции рассматриваемого транспортного средства выводит позицию транспортного средства 10, оцененную так, как описано выше, вместо информации позиции, полученной посредством глобальной системы позиционирования (GPS), например, в модуль 1021 оценки пути. Альтернативно, модуль 1023 оценки позиции рассматриваемого транспортного средства корректирует информацию позиции, полученную, например, посредством GPS, на основе позиции транспортного средства 10, оцененной так, как описано выше, и выводит скорректированную информацию позиции в модуль 1021 оценки пути. Обработка оценки позиции рассматриваемого транспортного средства, описанная выше, выполняется в течение периода, в который бесконтактная подача мощности выполняется для транспортного средства 10.
Далее описывается работа устройства передачи мощности. Контроллер 202 устройства 200 передачи мощности осуществляет переход состояния наземной катушки 201 в порядке этапа включения источника мощности, этапа заряда и этапа выключения источника мощности, как показано на фиг. 4, с приемом сигнала включения наземной катушки в качестве триггера. Как результат, на этапе заряда, электрическая мощность подается из наземной катушки 201 в катушку 101 транспортного средства для транспортного средства 10 (т.е. бесконтактная подача мощности выполняется для транспортного средства 10).
В этой связи, как показано на фиг. 9, в случае, если транспортное средство B в качестве другого примера транспортного средства 10 движется позади транспортного средства в качестве примера транспортного средства 10, имеющего устройство 200 передачи мощности, например, M-ая наземная катушка 201 принимает сигнал включения наземной катушки из устройства 100 приема мощности транспортного средства A и сигнал включения наземной катушки из устройства 100 приема мощности транспортного средства B. В случае, описанном выше, в зависимости от расстояния между транспортным средством A и транспортным средством B, имеется вероятность того, что бесконтактная подача мощности в транспортное средство B не выполняется надлежащим образом, когда источник мощности, который подает электрическую мощность в наземную катушку 201, включается снова для бесконтактной подачи мощности в транспортное средство B после того, как источник мощности, который подает электрическую мощность в наземную катушку 201, выключается, после того, как транспортное средство A проезжает через M-ую наземную катушку 201.
Следовательно, контроллер 202 устройства 200 передачи мощности выполняет определение перекрытия, чтобы определять то, следует или нет поддерживать этап заряда, на основе позиции каждого из транспортного средства A и транспортного средства B. В случае, если, при определении перекрытия, выполняется определение того, что этап заряда поддерживается, контроллер 202 поддерживает этап заряда до тех пор, пока транспортное средство B не проезжает через наземную катушку 201. Позиция каждого из транспортного средства A и транспортного средства B может оцениваться, например, из позиции устройства 200 передачи мощности, содержащего модуль 203 беспроводной связи, который осуществляет беспроводную связь с каждым из модуля 103 беспроводной связи устройства 100 приема мощности транспортного средства A и модуля 103 беспроводной связи устройства 100 приема мощности транспортного средства B.
Контроллер 202 устройства 200 передачи мощности выполняет переход состояния наземной катушки 201 в порядке этапа включения источника мощности, этапа заряда и этапа выключения источника мощности с приемом сигнала включения наземной катушки из устройства 100 приема мощности, предоставленного в транспортном средстве 10, в качестве триггера (следует обратиться к фиг. 4). Поскольку электрическая мощность не подается в наземную катушку 201 в течение периода, в который бесконтактная подача мощности не выполняется для транспортного средства 10. Другими словами, электрическая мощность подается в наземную катушку 201 только в течение периода, в который бесконтактная подача мощности выполняется для транспортного средства 10, можно подавлять возникновение магнитного поля утечки.
Определенное количество времени (например, в диапазоне от нескольких десятков миллисекунд до нескольких сотен миллисекунд) требуется для этапа включения источника мощности. Например, в случае, если транспортное средство 10 движется со скоростью 100 километров в час, транспортное средство 10 продвигается приблизительно на 2,78 метров в течение 100 миллисекунд. По этой причине, когда сигнал включения наземной катушки не передается, так что источник мощности включается до того, как транспортное средство 10 достигает позиции наземной катушки 201 (т.е. так что устройство 200 передачи мощности переходит в активированное состояние), имеется вероятность того, что бесконтактная подача мощности в транспортное средство 10 не выполняется надлежащим образом. С другой стороны, на будущую позицию транспортного средства 10 влияет, например, операция водителя транспортного средства 10 и т.п.
Следовательно, в первом варианте осуществления, модуль 1021 оценки пути контроллера 102 устройства 100 приема мощности оценивает путь транспортного средства 10 от текущего времени до предварительно определенного времени позднее, на основе вывода внутреннего датчика 14 и информации позиции, указывающей текущую позицию транспортного средства 10. В первом варианте осуществления, поскольку вывод внутреннего датчика 14, указывающий состояние перемещения транспортного средства 10, используется для оценки пути транспортного средства 10, можно оценивать путь, имеющий относительно высокую надежность.
Модуль 1022 определения контроллера 102 указывает возможные варианты для устройства 200 передачи мощности, которое должно находиться в активированном состоянии, посредством сравнения оцененного пути с информацией дорожных маршрутов на основе результата распознавания сигнальных линий дорожной разметки и картографической информации. Как описано выше, посредством сравнения оцененного пути с информацией дорожных маршрутов, можно определять то, представляет собой оцененный путь или нет путь вдоль формы дороги. По этой причине, можно подавлять указание ошибочного устройства 200 передачи мощности в качестве возможного варианта.
Модуль 1022 определения дополнительно определяет устройство 200 передачи мощности, которое фактически должно находиться в активированном состоянии, из числа указанных возможных вариантов, посредством определения того, имеется или нет вероятность того, что фактический курс транспортного средства 10 отклоняется от оцененного пути, например, на основе включенного/выключенного состояния переключателя 15 указателя поворота и т.п. Как описано выше, сигнал, указывающий функциональное намерение водителя транспортного средства 10, к примеру, включенное/выключенное состояние переключателя 15 указателя поворота, учитывается. По этой причине, даже в случае, если вероятность того, что фактический курс транспортного средства 10 отклоняется от оцененного пути, является относительно высокой, можно надлежащим образом определять устройство 200 передачи мощности, которое фактически должно находиться в активированном состоянии.
Диапазон, в котором модуль 103 беспроводной связи устройства 100 приема мощности и модуль 203 беспроводной связи устройства 200 передачи мощности могут обмениваться данными в беспроводном режиме друг с другом, например, представляет собой диапазон от нескольких десятков метров до ста метров. По этой причине, даже в случае, если транспортное средство 10 движется со скоростью 100 километров в час, можно передавать сигнал включения наземной катушки из устройства 100 приема мощности в устройство 200 передачи мощности, содержащее наземную катушку 201, приблизительно за 1 секунду до того, как транспортное средство 10 достигнет позиции наземной катушки 201, которая выполняет бесконтактную подачу мощности для транспортного средства 10. Таким образом, в системе бесконтактной подачи мощности, можно передавать сигнал включения наземной катушки в устройство 200 передачи мощности, содержащее наземную катушку 201, так что источник мощности включается до того, как транспортное средство 10 достигает позиции наземной катушки 201.
Как результат вышеуказанного, согласно системе бесконтактной подачи мощности, даже в случае, если транспортное средство 10 движется на относительно высокой скорости, можно надлежащим образом выполнять бесконтактную подачу мощности в транспортное средство 10. Помимо этого, поскольку подавляется переход устройства 200 передачи мощности, которое первоначально не должно находиться в активированном состоянии, в активированное состояние, можно подавлять возникновение магнитного поля утечки.
Обработка оценки позиции рассматриваемого транспортного средства, описанная выше, выполняется, так что можно дополнительно повышать точность информации позиции транспортного средства 10, например, по сравнению с точностью информации позиции, полученной только посредством GPS. По этой причине, можно повышать надежность пути, который оценивается в обработке оценки пути, описанной выше.
Определение перекрытия, описанное выше, выполняется посредством устройства 200 передачи мощности таким образом, что можно исключать вероятность уменьшения бесконтактной подачи мощности вследствие выключения источника мощности и повторного включения источника мощности.
В первом варианте осуществления, описанном выше, путь транспортного средства 10 оценивается посредством обработки оценки пути, и устройство 200 передачи мощности, которое должно находиться в активированном состоянии, определяется на основе оцененного пути и т.п. Для примера модификации в случае, если наземные катушки 201 размещаются на прямой дороге, имеющей одну полосу движения на одной стороне (т.е. в случае, если вероятность того, что не выполняется смена полосы движения или относительно большая операция руления, является высокой), может задаваться такая конфигурация, в которой будущая позиция транспортного средства 10 оценивается из скорости транспортного средства 10 вместо обработки оценки пути, и наземная катушка 201, которая должна находиться в активированном состоянии, определяется на основе оцененной будущей позиции.
Ниже описывается второй вариант осуществления системы бесконтактной подачи мощности со ссылкой на фиг. 10. Второй вариант осуществления является идентичным первому варианту осуществления за исключением того, что обработка оценки пути, описанная выше и т.п., выполняется в устройстве передачи мощности. Следовательно, во втором варианте осуществления, описание, перекрывающееся с описанием в первом варианте осуществления, опускается, общие части на чертеже обозначаются посредством идентичных ссылок с номерами, и только принципиально отличающиеся аспекты описываются со ссылкой на фиг. 10. Фиг. 10 является блок-схемой, показывающей конфигурацию контроллера устройства передачи мощности согласно второму варианту осуществления.
В системе бесконтактной подачи мощности согласно второму варианту осуществления, сигнал, указывающий состояние перемещения транспортного средства 10 и т.п., передается из устройства 100 приема мощности, предоставленного в транспортном средстве 10, в любое из устройств 200 передачи мощности. Устройство 200 передачи мощности, которое принимает сигналы, оценивает путь транспортного средства 10 и определяет (выбирает) устройство 200 передачи мощности, которое должно находиться в активированном состоянии.
Контроллер 202 устройства 200 передачи мощности выполнен с возможностью включать в себя модуль 2021 оценки пути и модуль 2022 определения, в качестве блоков обработки, которые логически реализованы, или схем обработки, которые физически реализованы, в контроллере 202, как показано на фиг. 10.
Далее поясняется обработка оценки пути. Контроллер 102 устройства 100 приема мощности передает вывод (в частности, скорость, ускорение/замедление транспортного средства, скорость относительно вертикальной оси или угол поворота при рулении) внутреннего датчика 14 и информацию позиции, указывающую текущую позицию транспортного средства 10, в устройство 200 передачи мощности. Модуль 2021 оценки пути контроллера 202 устройства 200 передачи мощности оценивает путь транспортного средства 10 от текущего времени до предварительно определенного времени позднее, на основе вывода внутреннего датчика 14 и информации позиции, указывающей текущую позицию транспортного средства 10, и с учетом запаздывания во времени, возникающего за счет связи.
Далее поясняется обработка определения. Контроллер 102 дополнительно передает информацию дорожных маршрутов на основе результата распознавания сигнальных линий дорожной разметки посредством модуля 12 распознавания сигнальных линий дорожной разметки и картографической информации 13, сигнала, указывающего включенное/выключенное состояние переключателя 15 указателя поворота и т.п., в устройство 200 передачи мощности. Модуль 2022 определения контроллера 202 определяет (выбирает) устройство 200 передачи мощности, которое должно находиться в активированном состоянии, на основе пути, оцененного посредством модуля 2021 оценки пути, и информации дорожных маршрутов, и кроме того, на основе сигнала, указывающего включенное/выключенное состояние переключателя 15 указателя поворота и т.п. Затем модуль 2022 определения передает сигнал включения наземной катушки в устройство 200 передачи мощности, которое, как определено, должно находиться в активированном состоянии, с помощью проводной связи.
Ниже описывается третий вариант осуществления системы бесконтактной подачи мощности со ссылкой на фиг. 11. Третий вариант осуществления является идентичным первому варианту осуществления за исключением того, что обработка оценки пути, описанная выше и т.п., выполняется посредством сервера в сети. Следовательно, в третьем варианте осуществления, описание, перекрывающееся с описанием в первом варианте осуществления, опускается, общие части на чертеже обозначаются посредством идентичных ссылок с номерами, и описываются только принципиально отличающиеся аспекты со ссылкой на фиг. 11. Фиг. 11 является схемой, показывающей общее представление системы бесконтактной подачи мощности согласно третьему варианту осуществления.
Система бесконтактной подачи мощности согласно третьему варианту осуществления выполнена с возможностью включать в себя сервер 50 в сети, такой как, например, Интернет. Сервер 50 выполнен с возможностью включать в себя модуль 51 оценки пути, модуль 52 определения и модуль 53 связи.
В системе бесконтактной подачи мощности, сигнал, указывающий состояние перемещения транспортного средства 10 и т.п., передается из устройства 100 приема мощности, предоставленного в транспортном средстве 10, на сервер 50 через сеть. Сервер 50, который принимает сигнал, оценивает путь транспортного средства 10 и определяет (выбирает) устройство 200 передачи мощности, которое должно находиться в активированном состоянии.
Далее поясняется обработка оценки пути. Контроллер 102 устройства 100 приема мощности передает вывод (в частности, скорость, ускорение/замедление транспортного средства, скорость относительно вертикальной оси или угол поворота при рулении) внутреннего датчика 14 и информацию позиции, указывающую текущую позицию транспортного средства 10, на сервер 50. Модуль 51 оценки пути сервера 50 оценивает путь транспортного средства 10 от текущего времени до предварительно определенного времени позднее, на основе вывода внутреннего датчика 14 и информации позиции, указывающей текущую позицию транспортного средства 10, и с учетом запаздывания во времени, возникающего за счет связи.
Далее поясняется обработка определения. Контроллер 102 дополнительно передает информацию дорожных маршрутов на основе результата распознавания сигнальных линий дорожной разметки посредством модуля 12 распознавания сигнальных линий дорожной разметки и картографической информации 13, сигнала, указывающего включенное/выключенное состояние переключателя 15 указателя поворота и т.п., на сервер 50. Модуль 52 определения определяет (выбирает) устройство 200 передачи мощности, которое должно находиться в активированном состоянии, на основе пути, оцененного посредством модуля 51 оценки пути, и информации дорожных маршрутов, и кроме того, на основе сигнала, указывающего включенное/выключенное состояние переключателя 15 указателя поворота, и т.п. Затем модуль 52 определения передает сигнал включения наземной катушки в устройство 200 передачи мощности, которое, как определено, должно находиться в активированном состоянии, через модуль 53 связи.
Ниже описываются различные аспекты изобретения, которые извлекаются из вариантов осуществления и примера модификации, описанных выше.
Система бесконтактной подачи мощности согласно первому аспекту изобретения представляет собой систему бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге, и включает в себя первый модуль оценки, выполненный с возможностью оценивать будущую позицию транспортного средства на основе скорости транспортного средства, и модуль указания, выполненный с возможностью указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, на основе оцененной будущей позиции.
В вариантах осуществления изобретения, "модули 1021, 2021, 51 оценки пути" представляют собой примеры первого модуля оценки, "модули 1022, 2022, 52 определения" представляют собой примеры модуля указания, "катушка 101 транспортного средства" представляет собой пример катушки для приема мощности, и "наземная катушка 201" представляет собой пример катушки для передачи мощности.
В системе бесконтактной подачи мощности, будущая позиция транспортного средства оценивается на основе скорости транспортного средства, и указывается катушка для передачи мощности, которая должна находиться в активированном состоянии. По этой причине, катушка для передачи мощности, соответствующая будущей позиции транспортного средства, переходит в активированное состояние, а с другой стороны, катушка для передачи мощности, которая не соответствует будущей позиции транспортного средства, не переходит в активированное состояние. Помимо этого, скорость транспортного средства учитывается, и в силу этого, даже в случае, если транспортное средство движется относительно быстро, можно надлежащим образом указывать катушку для передачи мощности, которая должна находиться в активированном состоянии.
Следовательно, согласно системе бесконтактной подачи мощности, даже в случае, если транспортное средство движется относительно быстро, можно надлежащим образом подавать электрическую мощность в транспортное средство и подавлять возникновение магнитного поля утечки.
Дополнительно, "скорость транспортного средства" может представлять собой скорость, непосредственно измеряемую, например, посредством датчика скорости транспортного средства и т.п., либо может представлять собой скорость, косвенно полученную, например, из ускорения транспортного средства или позиции транспортного средства.
В системе бесконтактной подачи мощности согласно первому аспекту изобретения, первый модуль оценки может оценивать прогнозированный курс, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость. Модуль указания может указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, на основе оцененного прогнозированного курса. Согласно первому аспекту изобретения, можно надлежащим образом указывать катушку для передачи мощности, которая должна находиться в активированном состоянии.
Система бесконтактной подачи мощности согласно первому аспекту изобретения дополнительно может включать в себя второй модуль оценки, выполненный с возможностью оценивать позицию транспортного средства на дороге на основе позиции в направлении, в котором идет дорога, для одной катушки для передачи мощности, которая подает электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, и величины электрической мощности, подаваемой из одной катушки для передачи мощности в катушку для приема мощности. Первый модуль оценки может оценивать будущую позицию на основе позиции, оцененной посредством второго модуля оценки, в дополнение к скорости. Согласно первому аспекту изобретения, можно оценивать позицию транспортного средства с относительно высокой точностью. Как результат, можно повышать точность оценки посредством первого модуля оценки. В вариантах осуществления изобретения, "модуль 1023 оценки позиции рассматриваемого транспортного средства" представляет собой пример второго модуля оценки.
Система бесконтактной подачи мощности согласно первому аспекту изобретения дополнительно может включать в себя модуль выбора, выполненный с возможностью выбирать то, следует или нет инструктировать указанной катушке для передачи мощности фактически находиться в активированном состоянии, на основе сигнала, указывающего функциональное намерение водителя транспортного средства. Согласно аспекту, описанному выше, можно выбирать катушку для передачи мощности, которая должна находиться в активированном состоянии, с учетом вероятности того, что позиция транспортного средства отклоняется от оцененной будущей позиции.
В вариантах осуществления изобретения, "модули 1022, 2022, 52 определения" представляют собой примеры модуля выбора. "Включенное/выключенное состояние переключателя 15 указателя поворота", "относительно высокое ускорение", "относительно большой угол поворота при рулении" и "сокращение расстояния между транспортными средствами" представляют собой примеры "функционального намерения водителя".
Система бесконтактной подачи мощности согласно первому аспекту изобретения дополнительно может включать в себя контроллер катушки, выполненный с возможностью управлять каждой из катушек для передачи мощности таким образом, чтобы переходить в активированное состояние, и управлять каждой из катушек для передачи мощности таким образом, чтобы переходить в состояние готовности, которое представляет собой состояние, в котором электрическая мощность не подается в катушку для приема мощности, после того, как каждая из катушек для передачи мощности переходит в активированное состояние. В случае, если имеется другое транспортное средство, отличающееся от транспортного средства и движущееся позади транспортного средства по дороге, контроллер катушки может выбирать то, следует или нет продлевать период, в который катушка для передачи мощности, которая переходит в активированное состояние вследствие транспортного средства, поддерживает активированное состояние, на основе позиции другого транспортного средства. Согласно первому аспекту изобретения, можно подавлять снижение возможности того, что бесконтактная подача мощности в другое транспортное средство выполняется, вследствие переключения между состоянием готовности и активированным состоянием наземной катушки. В вариантах осуществления изобретения, "контроллер 202" представляет собой пример контроллера катушки.
Устройство приема мощности согласно второму аспекту изобретения представляет собой устройство приема мощности, которое монтируется на транспортном средстве в системе бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге, и включает в себя первый модуль оценки, выполненный с возможностью оценивать будущую позицию транспортного средства на основе скорости транспортного средства, и модуль указания, выполненный с возможностью указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, на основе оцененной будущей позиции.
Согласно устройству приема мощности, аналогично системе бесконтактной подачи мощности согласно первому аспекту изобретения, описанной выше, даже в случае, если транспортное средство движется относительно быстро, можно надлежащим образом подавать электрическую мощность в транспортное средство и подавлять возникновение магнитного поля утечки.
В устройстве приема мощности согласно второму аспекту изобретения, первый модуль оценки может оценивать прогнозированный курс, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость. Модуль указания может указывать катушку для передачи мощности, которая должна находиться в активированном состоянии, на основе оцененного прогнозированного курса. Согласно второму аспекту изобретения, можно надлежащим образом указывать катушку для передачи мощности, которая должна находиться в активированном состоянии.
Устройство приема мощности согласно второму аспекту изобретения дополнительно может включать в себя второй модуль оценки, выполненный с возможностью оценивать позицию транспортного средства на дороге на основе позиции в направлении, в котором идет дорога, для одной катушки для передачи мощности, которая подает электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, и величины электрической мощности, подаваемой из одной катушки для передачи мощности в катушку для приема мощности. Первый модуль оценки может оценивать будущую позицию на основе позиции, оцененной посредством второго модуля оценки, в дополнение к скорости. Согласно второму аспекту изобретения, можно оценивать позицию транспортного средства с относительно высокой точностью. Как результат, можно повышать точность оценки посредством первого модуля оценки.
Устройство приема мощности согласно второму аспекту изобретения дополнительно может включать в себя модуль выбора, выполненный с возможностью выбирать то, следует или нет инструктировать указанной катушке для передачи мощности фактически находиться в активированном состоянии, на основе сигнала, указывающего функциональное намерение водителя транспортного средства. Согласно второму аспекту изобретения, можно выбирать катушку для передачи мощности, которая должна находиться в активированном состоянии, с учетом вероятности того, что позиция транспортного средства отклоняется от оцененной будущей позиции.
Изобретение не ограничено вариантами осуществления, описанными выше, и может надлежащим образом изменяться в пределах объема, который не противоречит сущности или идее изобретения, которая может пониматься из формулы изобретения и всего подробного описания. Дополнительно, система бесконтактной подачи мощности и устройство приема мощности, которые имеют изменение, как описано выше, также включаются в технический объем изобретения.
Группа изобретений относится к индуктивной зарядке аккумулятора транспортного средства. Система бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге, содержит первый модуль оценки и модуль указания. Первый модуль оценки выполнен с возможностью оценки прогнозированного курса, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость. Модуль указания выполнен с возможностью указания катушки для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, на основе оцененного прогнозированного курса транспортного средства. Также заявлено устройство приема мощности, монтируемое на транспортном средстве в системе бесконтактной подачи мощности. Технический результат заключается в возможности бесконтактной подачи мощности при высокой скорости транспортного средства и в подавлении возникновения магнитного поля утечки. 2 н. и 5 з.п. ф-лы, 14 ил.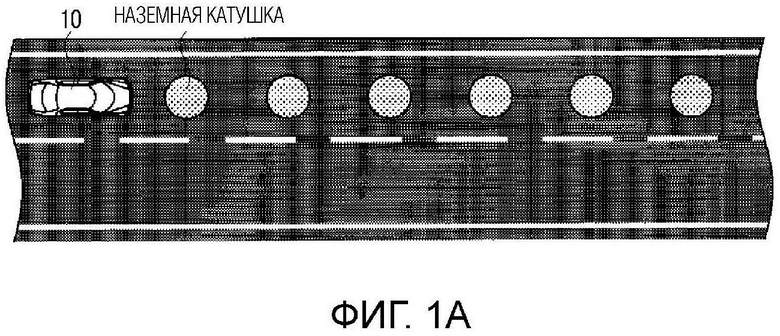
1. Система бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге, причем система бесконтактной подачи мощности содержит:
первый модуль оценки, выполненный с возможностью оценки прогнозированного курса, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость; и
модуль указания, выполненный с возможностью указания катушки для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, на основе оцененного прогнозированного курса транспортного средства.
2. Система бесконтактной подачи мощности по п. 1, дополнительно содержащая второй модуль оценки, выполненный с возможностью оценки позиции транспортного средства на дороге на основе позиции в направлении, в котором идет дорога, для одной катушки для передачи мощности, которая подает электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, и величины электрической мощности, подаваемой из одной катушки для передачи мощности в катушку для приема мощности,
при этом первый модуль оценки оценивает будущую позицию на основе позиции, оцененной посредством второго модуля оценки, в дополнение к скорости.
3. Система бесконтактной подачи мощности по п. 1, дополнительно содержащая модуль выбора, выполненный с возможностью выбора того, следует или нет инструктировать указанной катушке для передачи мощности фактически находиться в активированном состоянии, на основе сигнала, указывающего функциональное намерение водителя транспортного средства.
4. Система бесконтактной подачи мощности по любому из пп. 1-3, дополнительно содержащая контроллер катушки, выполненный с возможностью управления каждой из катушек для передачи мощности таким образом, что каждая из катушек для передачи мощности переходит в активированное состояние, и управления каждой из катушек для передачи мощности таким образом, что каждая из катушек для передачи мощности переходит в состояние готовности, которое представляет собой состояние, в котором каждая из катушек для передачи мощности не подает электрическую мощность в катушку для приема мощности, после того как каждая из катушек для передачи мощности переходит в активированное состояние,
при этом в случае, если имеется другое транспортное средство, которое отличается от транспортного средства и которое движется позади транспортного средства по дороге, контроллер катушки выбирает то, следует или нет продлевать период, в который катушка для передачи мощности, которая переходит в активированное состояние вследствие транспортного средства, поддерживает активированное состояние, на основе позиции другого транспортного средства.
5. Устройство приема мощности, монтируемое на транспортном средстве в системе бесконтактной подачи мощности, которая подает электрическую мощность бесконтактным способом из множества катушек для передачи мощности, расположенных на дороге, в катушку для приема мощности, смонтированную на транспортном средстве, движущемся по дороге, причем устройство приема мощности содержит:
первый модуль оценки, выполненный с возможностью оценки прогнозированного курса, который представляет собой набор будущих позиций, на основе состояния перемещения транспортного средства, включающего в себя скорость; и
модуль указания, выполненный с возможностью указания катушки для передачи мощности, которая должна находиться в активированном состоянии, которое представляет собой состояние способности подавать электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, на основе оцененного прогнозированного курса транспортного средства.
6. Устройство приема мощности по п. 5, дополнительно содержащее второй модуль оценки, выполненный с возможностью оценки позиции транспортного средства на дороге на основе позиции в направлении, в котором идет дорога, для одной катушки для передачи мощности, которая подает электрическую мощность в катушку для приема мощности, из числа катушек для передачи мощности, и величины электрической мощности, подаваемой из одной катушки для передачи мощности в катушку для приема мощности,
при этом первый модуль оценки оценивает будущую позицию на основе позиции, оцененной посредством второго модуля оценки, в дополнение к скорости.
7. Устройство приема мощности по любому из пп. 5, 6, дополнительно содержащее модуль выбора, выполненный с возможностью выбора того, следует или нет инструктировать указанной катушке для передачи мощности фактически находиться в активированном состоянии, на основе сигнала, указывающего функциональное намерение водителя транспортного средства.
| US 2015303714 A1, 22.10.2015 | |||
| WO 2011071344 A2, 16.06.2011 | |||
| US 2016190815 A1, 30.06.2016 | |||
| JP 2015027149 A, 05.02.2015 | |||
| СПОСОБ БЕСПРОВОДНОЙ ПЕРЕДАЧИ ЭЛЕКТРИЧЕСКОЙ ЭНЕРГИИ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ (ВАРИАНТЫ) | 2009 |
|
RU2408476C2 |

