Область техники, к которой относится изобретение
Настоящее изобретение относится в целом к позвоночным имплантатам и протезам, более точно к позвоночному стержню, который имеет храповой механизм, а также положение фиксации и разомкнутое положение.
Предпосылки создания изобретения
Сколиоз является одной из форм деформации позвоночника, которой страдает множество людей. Существующее оперативное лечение предусматривает прикрепление к позвоночнику длинных стержней для артродеза позвонков с помощью транспедикулярных винтов. Система стержней принудительно заставляет позвоночник занимать более безопасное положение.
К сожалению, у этой системы имеются серьезные недостатки; исправление деформации редко является полным, применение длинных стержней для артродеза позвонков на протяжении всей жизни является нежелательной клинической ситуацией, и нередко возникают неисправности.
Краткое изложение сущности изобретения
В настоящем изобретении предложено усовершенствованное позвоночное устройство с храповым механизмом, которое может удлиняться или укорачиваться с использованием храпового механизма. Устройство имеет элемент переменной длины, который может соединяться со стандартными транспедикулярными винтами, а также другими позвоночными стержнями с помощью соответствующих соединителей. Элемент переменной длины также может непосредственно соединяться с костными элементами позвоночника или опираться на них.
В одном из вариантов осуществления изобретения устройство может иметь три различных конфигурации:
а) храповой механизм действует, и элемент переменной длины способен изменять свою длину (удлиняться или укорачиваться) в одном направлении;
б) храповой механизм не действует, и элемент переменной длины способен перемещаться во встречных направлениях, соответствующих направлениям при удлинении и укорачивании;
в) положение фиксации, в котором длина элемента переменной длины является постоянной.
В одном из вариантов осуществления изобретения выбор этих конфигураций может делаться путем поворота внутреннего элемента конструкции. Например, поворот внутреннего элемента может осуществляться с использованием механизма червячной передачи. Червячная передача может приводиться в действие валом посредством чрескожной процедуры или имплантируемым устройством, таким как электродвигатель, магнитный узел или другое средство, известное специалистам в данной области техники.
В другом варианте осуществления изобретения элемент переменной длины может иметь два участка различной жесткости. Например, элемент переменной длины может иметь гибкий участок (например, когда храповик сконструирован таким образом, что стержень может только укорачиваться), такой как гибкий трос, канат, гибкое механическое соединение и другое средство, известное специалистам в данной области техники.
В другом варианте осуществления изобретения, в котором стержень опирается непосредственно на костную структуру позвоночника, крюк, зацепляющий кость, может иметь второй крюк для его фиксации в оптимальном положении.
Таким образом, в одном из вариантов осуществления настоящего изобретения предложено позвоночное устройство с храповым механизмом, имеющее элемент переменной длины, содержащий храповой механизм, который имеет рабочую конфигурацию, допускающую изменение длины элемента переменной длины в одном направлении и предотвращающую изменение длины элемента переменной длины в противоположном направлении, при этом элемент переменной длины содержит многоосные соединительные элементы для крепления к кости с возможностью поворота вокруг нескольких осей поворота.
В одном из вариантов осуществления настоящего изобретения храповой механизм имеет другую рабочую конфигурацию, при которой элемент переменной длины зафиксирован на месте, и еще одну рабочую конфигурацию, при которой храповой механизм нейтрализован, а элемент переменной длины способен изменять свою длину в любом из направлений, при этом выбором одной из рабочих конфигураций управляет устройство управления.
В одном из вариантов осуществления настоящего изобретения устройство управления избирательно перемещает собачку храпового механизма в положение рабочего совмещения или из положения рабочего совмещения с зубьями храпового механизма и избирательно перемещает стопорный элемент в положение зацепления или из положения зацепления с элементом переменной длины. Собачка и стопорный элемент могут быть установлены на шпинделе, поворачиваемом устройством управления. В качестве альтернативы, собачка и стопорный элемент могут быть установлены на эксцентриковом механизме, поворачиваемом устройством управления.
В одном из вариантов осуществления настоящего изобретения многоосные соединительные элементы расположены на противоположных концах элемента переменной длины или вблизи них.
В одном из вариантов осуществления настоящего изобретения предусмотрено смещающее устройство для приложения смещающего усилия к элементу переменной длины.
В одном из вариантов осуществления настоящего изобретения по меньшей мере один из многоосных соединительных элементов представляет собой шарнирное соединение. Дополнительно или в качестве альтернативы, по меньшей мере один из многоосных соединительных элементов представляет собой крюк.
В другом варианте осуществления настоящего изобретения храповой механизм не имеет зубьев.
Краткое описание чертежей
Настоящее изобретение будет более полно понято и оценено из следующего далее подробного описания со ссылкой на чертежи, на которых:
на фиг.1 в упрощенном виде показано продольное сечение позвоночного устройства, сконструированного и действующего согласно одному из вариантов осуществления изобретения,
на фиг.2 в упрощенном виде показано поперечное сечение, перпендикулярное сечению, показанному на фиг.1,
на фиг.3 в упрощенном виде показано еще одно продольное сечение позвоночного устройства со смещающим устройством, сконструированного и действующего согласно другому варианту осуществления изобретения,
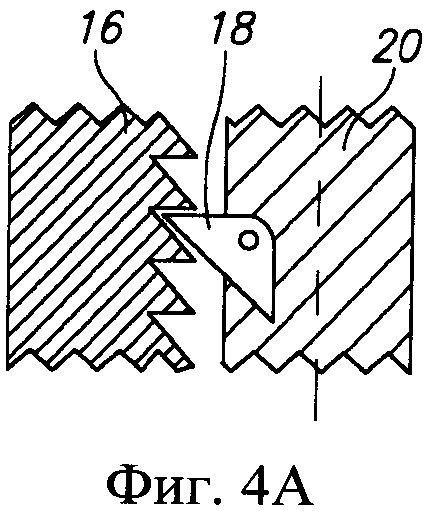
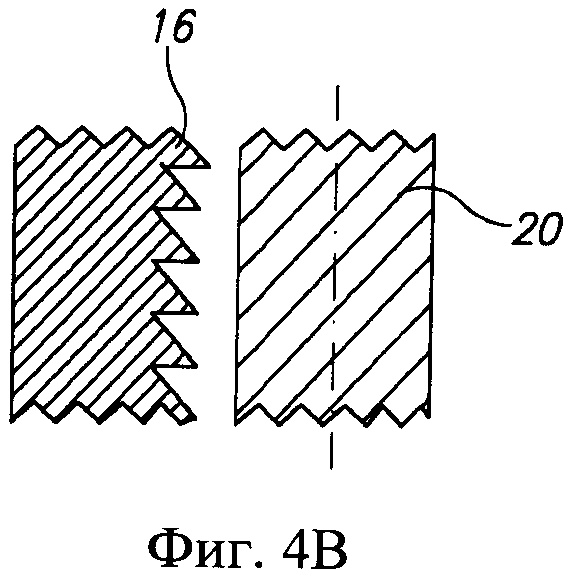
на фиг.4А, 4Б и 4В в упрощенном виде показаны три регулируемых положения храпового механизма, проиллюстрированного на фиг.1,
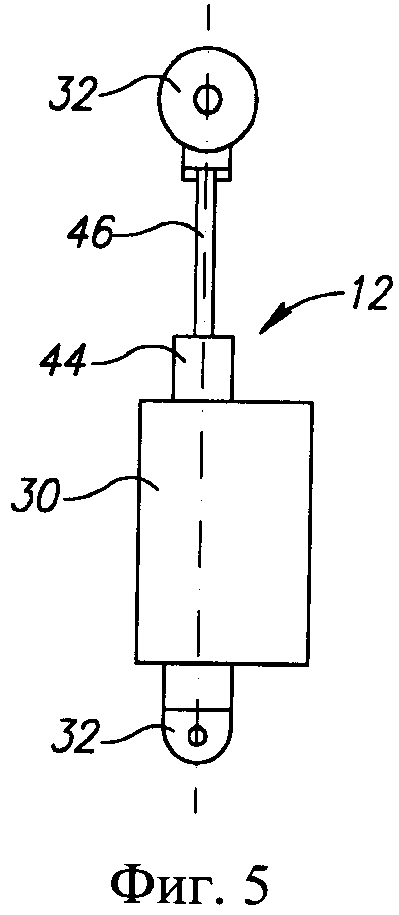
на фиг.5 в упрощенном виде наглядно проиллюстрировано позвоночное устройство, рассчитанное только на укорачивание и имеющее гибкий участок, сконструированное и действующее согласно другому варианту осуществления изобретения,
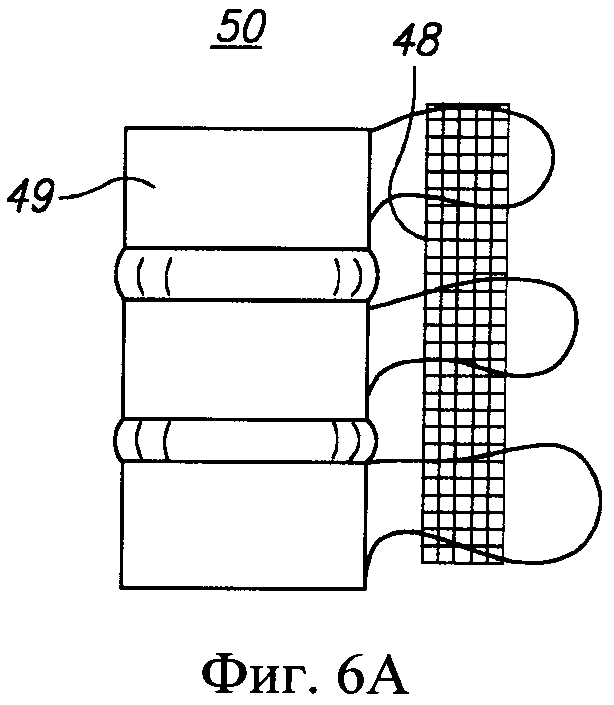
на фиг.6А и 6Б в упрощенном виде наглядно проиллюстрированы дополнительные средства, которые могут использоваться с устройством в целях оптимальной коррекции деформации согласно одному из вариантов осуществления изобретения,
на фиг.7, 8, 9А и 9Б в упрощенном виде наглядно проиллюстрированы опорные элементы позвоночного стержня, непосредственно прижатые к костным элементам позвоночника, согласно одному из вариантов осуществления изобретения,
на фиг.10 в упрощенном виде показано позвоночное устройство, соединенное с двумя костными винтами, сконструированное и действующее согласно другому варианту осуществления изобретения,
на фиг.11 в упрощенном виде наглядно показано поперечное сечение позвоночного устройства, проиллюстрированного на фиг.10,
на фиг.12 в упрощенном увеличенном виде показан механизм управления позвоночного устройства, проиллюстрированного на фиг.10,
на фиг.13 в упрощенном виде наглядно показано шарнирное соединение для соединения устройства, проиллюстрированного на фиг.10, с костным винтом,
на фиг.14 и 15 в упрощенном виде наглядно показаны не имеющие зубьев храповые механизмы позвоночных устройств согласно вариантам осуществления изобретения.
Подробное описание вариантов осуществления
Рассмотрим фиг.1, на которой проиллюстрировано позвоночное устройство 10 с храповым механизмом, сконструированное и действующее согласно одному из неограничивающих вариантов осуществления изобретения.
Позвоночное устройство 10 с храповым механизмом содержит элемент 12 переменной длины. В проиллюстрированном варианте осуществления элементом 12 переменной длины является стержень. Термином "стержень" обозначается любой тонкий элемент любого размера и формы в поперечном сечении, такой как без ограничения стержень, прут, проволока и т.п.
Позвоночное устройство 10 содержит храповой механизм 14, который имеет рабочую конфигурацию, допускающую изменение длины элемента 12 переменной длины в одном направлении и предотвращающую изменение длины элемента 12 переменной длины в противоположном направлении, как дополнительно пояснено далее.
В проиллюстрированном на фиг.1 варианте осуществления позвоночное устройство 10 содержит храповой механизм 14, который имеет зубья 16, выполненные на протяжении осевого участка элемента 12 переменной длины, и собачку 18 для захвата одного из зубьев 16. Собачка 18 установлена на барабане 20, прикрепленном к шпинделю 22, поворачиваемом устройством управления, которым может являться червячная передача 24, входящая в зацепление с зубьями шестерни 26 на конце шпинделя 22.
Один конец 23 элемента 12 переменной длины способен линейно перемещаться через отверстие 28 в корпусе 30. Элемент 12 переменной длины содержит два многоосных соединительных элемента 32. В проиллюстрированном варианте осуществления один многоосный соединительный элемент 32 расположен на конце 23 элемента 12 переменной длины или вблизи него, а другой многоосный соединительный элемент 32 расположен на корпусе 30. В качестве альтернативы, элемент 12 переменной длины может быть сконструирован таким образом, что второй многоосный соединительный элемент 32 установлен на нем, на конце или вблизи конца, противоположного концу 23. Оба многоосных соединительных элемента 32 служат для крепления устройства 10 к имеющейся костной структуре позвоночника (например, с помощью транспедикулярных винтов, которые проходят через элементы 32, как показано на фиг.10). Многоосные соединительные элементы 32 допускают поворот вокруг нескольких осей поворота, например вокруг оси 33 (перпендикулярной плоскости фиг.1) и осей 34 и/или 35. В проиллюстрированном на фиг.1 варианте осуществления один или оба многоосных соединительных элемента 32 имеют шарнирные соединения. Дополнительно или в качестве альтернативы, как показано на фиг.3, один или оба многоосных соединительных элемента 32 содержат крюк 36.
После имплантации устройства 10 пациенту согласно стандартному плану лечения пациента обычно просят нагнуться в таком направлении, чтобы концы 23 элемента 12 переменной длины дополнительно вышли из корпуса 30 и зубья 16 прошли на один шаг (или на несколько шагов в случае указания врача) за собачку 18. При этом увеличивается длина элемента 12 переменной длины. После шагового изменения длины собачка 18 удерживает элемент 12 переменной длины на месте. За счет этого элемент 12 переменной длины может удлиняться постепенно без нанесения травмы пациенту. В качестве альтернативы, храповой механизм 14 может допускать прерывистое поступательное перемещение конца 23 элемента 12 переменной длины внутрь корпуса 30, чтобы тем самым уменьшать длину элемента 12 переменной длины при каждом следующем наклоне пациента, если конкретным планом лечения требуется уменьшение длины.
В одном из вариантов осуществления настоящего изобретения храповой механизм 14 имеет другую рабочую конфигурацию, при которой элемент 12 переменной длины зафиксирован на месте. Это может достигаться с помощью стопорного элемента 38, который может находиться на барабане 20, как показано на фиг.2, например, под углом 90 градусов к собачке 18. Устройство управления (червячная передача 24) способно поворачивать барабан 20/шпиндель 22, в результате чего собачка 18 отодвигается и выходит из зацепления с зубьями 16, а стопорный элемент 38 (который может иметь такую же форму, как и собачка 18) одновременно входит в зацепление с одним из зубьев 16 (как показано на фиг.4Б).
В одном из вариантов осуществления настоящего изобретения храповой механизм 14 имеет еще одну рабочую конфигурацию, при которой он нейтрализован, и элемент 12 переменной длины способен изменять свою длину в любом из направлений. Это может достигаться с помощью устройства управления (червячной передачи 24), поворачивающей шпиндель 22, в результате чего собачка 18 и стопорный элемент отодвигаются и выходят из зацепления с зубьями 16 (как показано на фиг.4В). Червячная передача 24 может приводиться в действие валом 40 посредством чрескожной процедуры или имплантируемым устройством, таким как электродвигатель, магнитный узел или другое средство, известное специалистам в данной области техники.
Как показано на фиг.3, в одном из вариантов осуществления настоящего изобретения смещающее устройство 42 способно прилагать смещающее усилие к элементу 12 переменной длины. Смещающим устройством 42 может являться металлическая пружина, пластмассовая пружина, эластомерный или пневматический раздвижной стержень или амортизатор. Смещающее устройство 42 принуждает элемент 12 переменной длины перемещаться в направлении, заданном храповым механизмом 14.
Рассмотрим фиг.5. В этом варианте осуществления элемент 12 переменной длины имеет жесткий участок 44 и гибкий участок 46. Гибкий участок 46 может представлять собой трос, канат, гибкое механическое соединение или любое другое средство, которое передает тянущее усилие, но не передает жесткому участку 44 моменты от соединительного элемента 32.
Рассмотрим фиг.6А и 6Б, на которых проиллюстрированы устройства, которые могут применяться в сочетании с устройством 10 с целью оптимальной коррекции деформации позвоночника. Как показано на фиг.6А, вокруг двух или более позвонков 49 установлен ограничивающий изгиб элемент 48 для ограничения степени изгиба позвоночника пациента на этом участке. Ограничивающим изгиб элементом 48 может являться гибкая лента, проволока, струна или любое другое средство, которое предотвращает чрезмерный изгиб остистого отростка.
Как показано на фиг.6Б, между двумя или более позвонками 49 находится один или несколько ограничивающих изгиб элементов 50 для ограничения степени изгиба позвоночника пациента на этом участке. Ограничивающие изгиб элементы 50 (которые также могут применяться на фиг.6А) могут быть изготовлены из металла, пластмассы или любого жесткого или полужесткого материала и могут иметь прямоугольное, закругленное или эллиптическое поперечное сечение или поперечное сечение любой другой анатомической формы.
Рассмотрим фиг.7 и 9А, на которых проиллюстрированы некоторые опорные элементы, которые удерживают устройство 10 прижатым непосредственно к костным элементам позвоночника. Опорные элементы могут использоваться дополнительно или вместо простых крюков, показанных на фиг.3. Позицией 700 обозначен вид позвонков сверху в разрезе. Опорный элемент 52 прочно соединен с устройством 10 (не показано). Опорный элемент 52 может находиться над или под поперечным отростком позвонка. Обычно опорный элемент на одном конце стержня находится над одним поперечным отростком позвонка, а опорный элемент на другом конце находится под другим поперечным отростком позвонка. Крюк 54 удерживает пластинку того же позвонка, а соединительный элемент 56 соединяет опорный элемент 52 с крюком 54. Эта конструкция обеспечивает прикрепление опорного элемента 52 максимально близко к основанию поперечного отростка, т.е. его наиболее прочному участку.
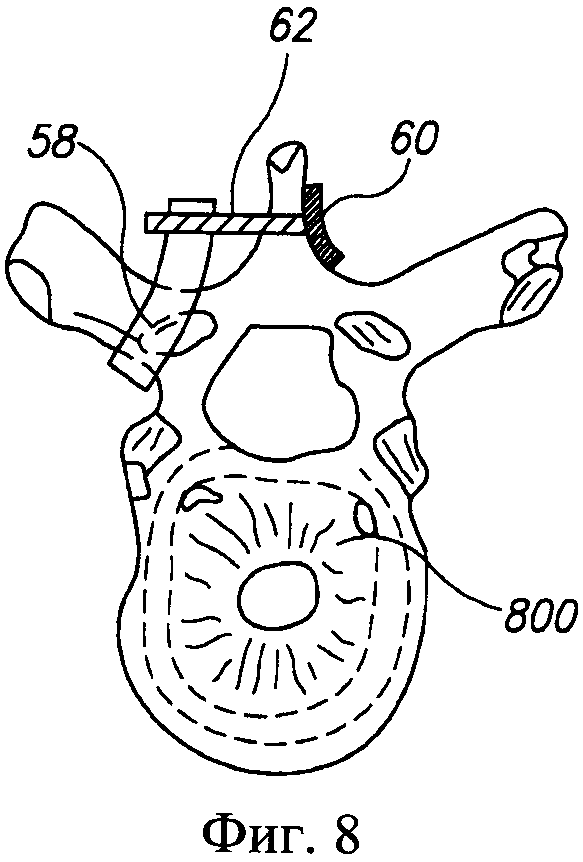
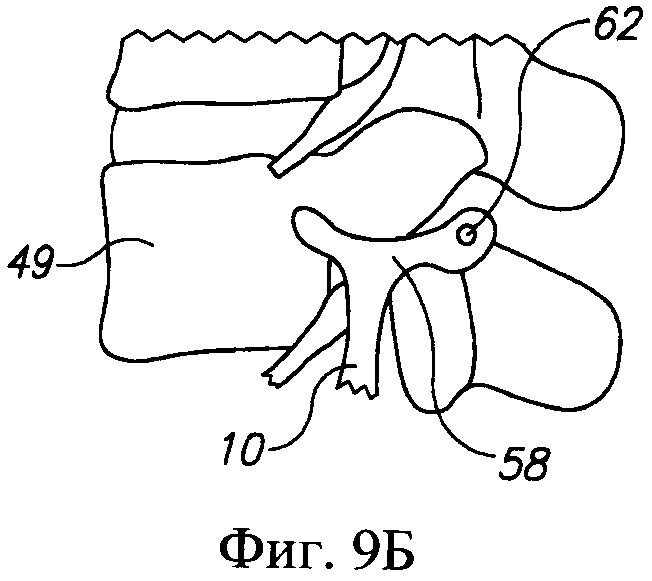
Рассмотрим фиг.8 и 9Б, на которых проиллюстрировано другое опорное средство, используемое, когда позвоночный стержень прикреплен непосредственно к костным элементам позвоночника. Позицией 800 обозначен вид позвонков сверху в разрезе. Опорный элемент 58 прочно соединен с устройством 10 (не показано). Опорный элемент 58 может находиться над или под поперечным отростком позвонка. Обычно опорный элемент на одном конце стержня находится над одним поперечным отростком позвонка, а опорный элемент на другом конце находится под другим поперечным отростком позвонка. Опорный элемент 60 расположен с противоположной стороны остистого отростка того же позвонка, а соединительный элемент 62 соединяет опорный элемент 58 с опорным элементом 60. Эта конструкция обеспечивает прикрепление опорного элемента 58 максимально близко к основанию поперечного отростка, т.е. его наиболее прочному участку.
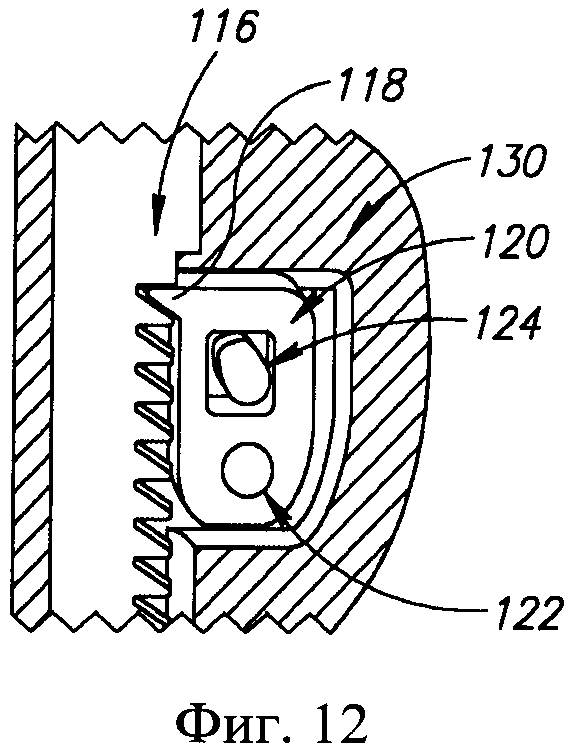
Рассмотрим фиг.10-13, на которых проиллюстрировано позвоночное устройство 100 с храповым механизмом, сконструированное и действующее согласно другому неограничивающему варианту осуществления изобретения. Как и в варианте осуществления, проиллюстрированном на фиг.1, позвоночное устройство 100 содержит храповой механизм 114, который имеет рабочую конфигурацию, допускающую изменение длины элемента 112 переменной длины в одном направлении и предотвращающую изменение длины элемента 112 переменной длины в противоположном направлении. Храповой механизм 114 имеет зубья 116, выполненные на протяжении осевого участка элемента 112 переменной длины, и собачку 118 для захвата одного из зубьев 116. Собачка 118 отходит от устройства 120 управления, установленного на оси 122 поворота и снабженного эксцентриковым кулачком 124. При повороте эксцентрикового кулачка 124 собачка 118 перемещается в одно из трех положений: а) положение храпового зацепления с зубьями 116, в котором элемент 112 переменной длины может пошагово перемещаться в одном направлении, б) положение фиксации с зубьями 116, в котором элемент 112 переменной длины не может перемещаться, и в) положение вне зацепления с зубьями 116, в котором элемент 112 переменной длины может свободно перемещаться в обоих направлениях.
Один конец 123 элемента 112 переменной длины способен линейно перемещаться через отверстие 128 в корпусе 130. Элемент 112 переменной длины содержит два многоосных соединительных элемента 132. Как описано выше, оба многоосных соединительных элемента 132 служат для крепления устройства 100 к имеющейся костной структуре позвоночника, например, с помощью транспедикулярных винтов 133, которые проходят через элементы 132, как показано на фиг.10. На фиг.13 показана головка 135 транспедикулярного винта 133, которая прошла через многоосный соединительный элемент 132 (например, шарнирное соединение), при этом гайка 134 прочно удерживает транспедикулярный винт 133 на месте, обеспечивая многоосный поворот.
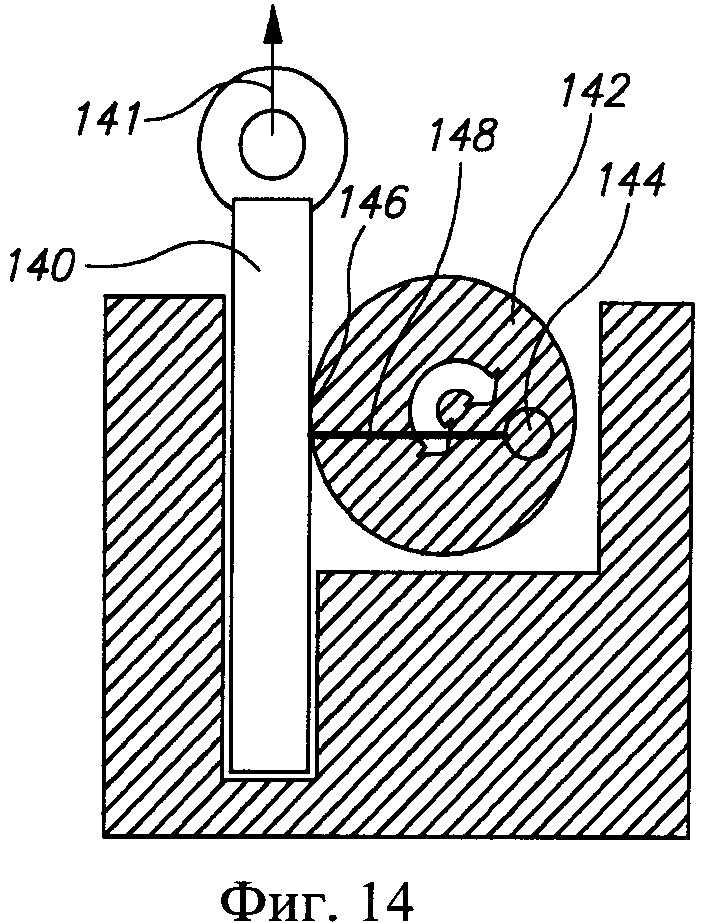
В описанных вариантах осуществления храповой механизм имеет зубья. В другом варианте осуществления настоящего изобретения у храпового механизма отсутствуют зубья (бесступенчатый "храповик"), и он имеет бесконечное число положений в отличие от храпового механизма с дискретными шагами. На фиг.14 и 15 проиллюстрированы два примера. На фиг.14 показан стержень 140 для линейного перемещения в направлении стрелки 141. На оси 144 поворота несимметрично относительно центра установлен диск 142. Диск 142 соприкасается со стержнем 140 в точке 146 над линией 148, перпендикулярной стержню 140 и проходящей через центр оси 144 поворота. Стержень 140 не может перемещаться вниз (противоположно стрелке 141), поскольку он заклинен относительно диска 142 в точке 146.
Как показано на фиг.15, клин 150 соприкасается со стерженем 140. Стержень 140 не может перемещаться вниз (противоположно стрелке 141), поскольку он зафиксирован клином 150.
Может применяться другой храповой механизм без зубьев, такой как без ограничения храповой механизм без зубьев, описанный в патенте US 5152197. Специалисты в данной области техники поймут, что настоящее изобретение не ограничено конкретно проиллюстрированными и описанными вариантами осуществления. В объем настоящего изобретения входят комбинации и подкомбинации описанных признаков, а также их модификации и разновидности, не известные из уровня техники, которые смогли бы предложить специалисты после ознакомления с описанием.
| название | год | авторы | номер документа |
|---|---|---|---|
| Спинальное устройство с храповым механизмом (варианты) | 2013 |
|
RU2615904C2 |
| СИСТЕМА ДЛЯ ЗАДНЕЙ ФИКСАЦИИ ПОЗВОНОЧНИКА ПЛАСТИНОЙ | 2012 |
|
RU2605147C2 |
| Спинальный кейдж | 2013 |
|
RU2615666C2 |
| СИСТЕМА И СПОСОБ СТАБИЛИЗАЦИИ ПОЗВОНКОВ ПРИ ПОМОЩИ ПРОВОЛОЧНО ПРОВОДИМОГО ТРАНСПЕДИКУЛЯРНОГО ВИНТА | 2009 |
|
RU2513155C2 |
| УСТРОЙСТВО ДЛЯ ОПЕРАТИВНОГО ЛЕЧЕНИЯ ИСКРИВЛЕНИЙ ПОЗВОНОЧНИКА | 1991 |
|
RU2037318C1 |
| Способ декомпрессии спинного мозга при переломах грудных и поясничных позвонков | 2022 |
|
RU2798042C1 |
| СПОСОБ ЗАДНЕ-ТРАНСФОРАМИНАЛЬНОГО МЕЖТЕЛОВОГО СПОНДИЛОДЕЗА ПРИ ДЕКОМПРЕССИВНО-СТАБИЛИЗИРУЮЩИХ ОПЕРАТИВНЫХ ВМЕШАТЕЛЬСТВАХ НА ПОЯСНИЧНОМ ОТДЕЛЕ ПОЗВОНОЧНИКА | 2020 |
|
RU2726399C1 |
| СПОСОБ МОНОСЕГМЕНТАРНОЙ ТРАНСПЕДИКУЛЯРНОЙ СТАБИЛИЗАЦИИ ПЕРЕЛОМОВ ТЕЛ НИЖНИХ ГРУДНЫХ И ПОЯСНИЧНЫХ ПОЗВОНКОВ | 2012 |
|
RU2485904C1 |
| Способ хирургического лечения идиопатического сколиоза позвоночника с использованием 3D прототипирования модели позвоночника для введения транспедикулярных винтов | 2024 |
|
RU2828969C1 |
| СПОСОБ ВОССТАНОВЛЕНИЯ БАЛАНСА ПОЗВОНОЧНИКА ПРИ ВРОЖДЕННОЙ И СИСТЕМНОЙ ДЕФОРМАЦИИ ШЕЙНОГО ОТДЕЛА | 2022 |
|
RU2803691C1 |










Изобретение относится к медицине. Позвоночное устройство с храповым механизмом содержит элемент переменной длины, содержащий храповой механизм, который имеет рабочую конфигурацию, допускающую изменение длины элемента переменной длины в одном направлении и предотвращающую изменение длины элемента переменной длины в противоположном направлении. Элемент переменной длины содержит многоосные соединительные элементы для крепления к кости с возможностью поворота вокруг нескольких осей поворота, характеризующееся наличием транспедикулярных винтов, которые проходят через указанные соединительные элементы. Каждый из указанных транспедикулярных винтов характеризуется наличием гайки, которая прочно удерживает транспедикулярный винт на месте и обеспечивает, наряду с этим, многоосный поворот указанного транспедикулярного винта. Изобретение обеспечивает полное исправление деформации.12 з.п. ф-лы, 15 ил.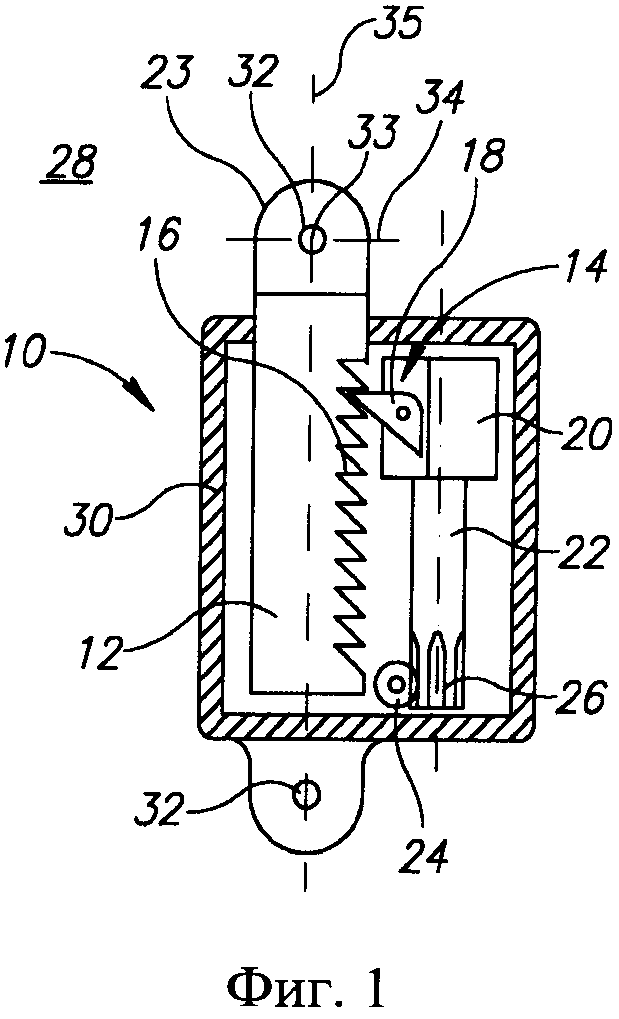
1. Позвоночное устройство с храповым механизмом, содержащее:
элемент переменной длины, содержащий храповой механизм, который имеет рабочую конфигурацию, допускающую изменение длины элемента переменной длины в одном направлении и предотвращающую изменение длины элемента переменной длины в противоположном направлении, при этом элемент переменной длины содержит многоосные соединительные элементы для крепления к кости с возможностью поворота вокруг нескольких осей поворота, характеризующееся наличием транспедикулярных винтов, которые проходят через указанные соединительные элементы, при этом каждый из указанных транспедикулярных винтов характеризуется наличием гайки, которая прочно удерживает транспедикулярный винт на месте и обеспечивает, наряду с этим, многоосный поворот указанного транспедикулярного винта.
2. Позвоночное устройство с храповым механизмом по п. 1, в котором храповой механизм имеет другую рабочую конфигурацию, при которой элемент переменной длины зафиксирован на месте.
3. Позвоночное устройство с храповым механизмом по п. 1, в котором храповой механизм имеет другую рабочую конфигурацию, при которой храповой механизм нейтрализован, и элемент переменной длины способен изменять свою длину в любом из направлений.
4. Позвоночное устройство с храповым механизмом по п. 1, в котором храповой механизм имеет другую рабочую конфигурацию, при которой элемент переменной длины зафиксирован на месте, и еще одну рабочую конфигурацию, при которой храповой механизм нейтрализован, а элемент переменной длины способен изменять свою длину в любом из направлений, при этом выбором одной из рабочих конфигураций управляет устройство управления.
5. Позвоночное устройство с храповым механизмом по п. 4, в котором устройство управления избирательно перемещает собачку храпового механизма в положение рабочего совмещения или из положения рабочего совмещения с зубьями храпового механизма и избирательно перемещает стопорный элемент в положение зацепления или из положения зацепления с элементом переменной длины.
6. Позвоночное устройство с храповым механизмом по п. 5, в котором собачка и стопорный элемент установлены на шпинделе, поворачиваемом устройством управления.
7. Позвоночное устройство с храповым механизмом по п. 5, в котором собачка и стопорный элемент установлены на эксцентриковом механизме, поворачиваемом устройством управления.
8. Позвоночное устройство с храповым механизмом по п. 1, в котором один из многоосных соединительных элементов расположен на конце элемента переменной длины или вблизи него.
9. Позвоночное устройство с храповым механизмом по п. 1, дополнительно содержащее смещающее устройство, способно прилагать смещающее усилие к элементу переменной длины.
10. Позвоночное устройство с храповым механизмом по п. 1, в котором элемент переменной длины имеет два участка различной жесткости.
11. Позвоночное устройство с храповым механизмом по п. 1, в котором по меньшей мере один из многоосных соединительных элементов представляет собой шарнирное соединение.
12. Позвоночное устройство с храповым механизмом по п. 1, в котором по меньшей мере один из многоосных соединительных элементов представляет собой крюк.
13. Позвоночное устройство с храповым механизмом по п. 1, в котором храповой механизм выполнен без зубьев.
| US 2010057127 A1, 04.03.2010 | |||
| УСТРОЙСТВО ДЛЯ ХИРУРГИЧЕСКОГО ЛЕЧЕНИЯ СКОЛИОЗА | 1995 |
|
RU2077283C1 |
| US 2006235399 A1, 19.10.2006 | |||
| US 5152197 A, 06.10.1992 | |||
| US 2002188296 A1, 12.12.2002 | |||
| US 5700263 A, 23.12.1997 | |||
| WO 2006107891 A2, 12.10.2006. | |||

