Область техники, к которой относится изобретение
Изобретение относится в целом к спинальным имплантатам и протезам, более точно, к спинальным имплантатам с храповыми механизмами, таким как спинальный имплантат с сочленениями, допускающими движение с различными степенями подвижности, или спинальный имплантат с силовым аппликатором для управления храповым механизмом.
Предпосылки создания изобретения
Сколиоз является одной из форм деформации позвоночника, которой страдает множество людей. Существующее хирургическое лечение предусматривает крепление к позвоночнику длинных фиксирующих стержней с помощью транспедикулярных винтов. Система стержней предназначена для принудительной фиксации деформированного позвоночника в более полезном для здоровья положении. Другие заболевания позвоночника, которые часто лечат путем артродеза позвонков, включают гиперкифоз и гиперлордоз.
В качестве альтернативы артродезу, в изобретении по патентной заявке PCT/US 2011/035278, автором которого является автор настоящего изобретения, предложены усовершенствованные спинальные устройства, которые можно удлинять или укорачивать с использованием храпового механизма. Они имеют элемент переменной длины, который может соединяться со стандартными транспедикулярными винтами, а также с другими спинальными стержнями с использованием соответствующих соединителей.
Краткое изложение сущности изобретения
В основу настоящего изобретения положена задача создания дополнительно усовершенствованных спинальных устройств.
В одном из вариантов осуществления спинальное устройство выполнено в виде спинального стержня (термином стержень или стержневой узел обозначается один или несколько элементов удлиненной формы, которые вместе действуют как стержень и необязательно имеют цилиндрическую форму и также могут иметь плоскую форму и другие формы), который можно удлинять или укорачивать с использованием храпового механизма. Стержень является элементом переменной длины, который может соединяться со стандартными транспедикулярными винтами, а также с другими спинальными стержнями с использованием соответствующих соединителей. Элемент переменной длины также может непосредственно соединяться с костными элементами позвоночника или опираться на них.
В одном из вариантов осуществления изобретения для устройства могут быть заданы три различные конфигурации:
а) храповой механизм действует, а элемент переменной длины (стержня) может изменять свою длину (расширяться или сжиматься) в одном направлении,
б) храповой механизм не действует, а элемент переменной длины может перемещаться в противоположных направлениях, соответствующих направлениям расширения и сжатия,
в) положение фиксации, в котором длина элемента переменной длины является постоянной.
В одном из вариантов осуществления изобретения эти конфигурации могут выбираться путем поворота внутреннего элемента конструкции. Например, внутренний элемент может поворачиваться с использованием механизма червячной передачи. Червячная передача может приводиться в действие валом, посредством чрескожной процедуры или с помощью имплантируемого механизма, такого как электродвигатель, магнитное устройство или другие средства, известные специалистам в данной области техники.
В другом варианте осуществления настоящего изобретения элемент переменной длины может иметь два участка различной жесткости. Например, элемент переменной длины может иметь гибкий участок (например, когда храповой механизм рассчитан только на укорачивание стержня), такой как гибкий кабель, трос, гибкое механическое сочленение и другие средства, известные специалистам в данной области техники.
В другом варианте осуществления, применимом, когда стержень опирается непосредственно на костную структуру позвоночника, крюк, цепляющийся за кость, может иметь второй крюк для его фиксации в оптимальном положении.
Краткое описание чертежей
Настоящее изобретение будет лучше понято из следующего далее подробного описания в сочетании с чертежами, на которых:
на фиг. 1 в упрощенном виде наглядно проиллюстрировано спинальное устройство с храповым механизмом, сконструированное и действующее согласно одному из неограничивающих вариантов осуществления настоящего изобретения,
на фиг. 2 в упрощенном виде наглядно проиллюстрирован храповой механизм спинального устройства с храповым механизмом, показанного на фиг. 1,
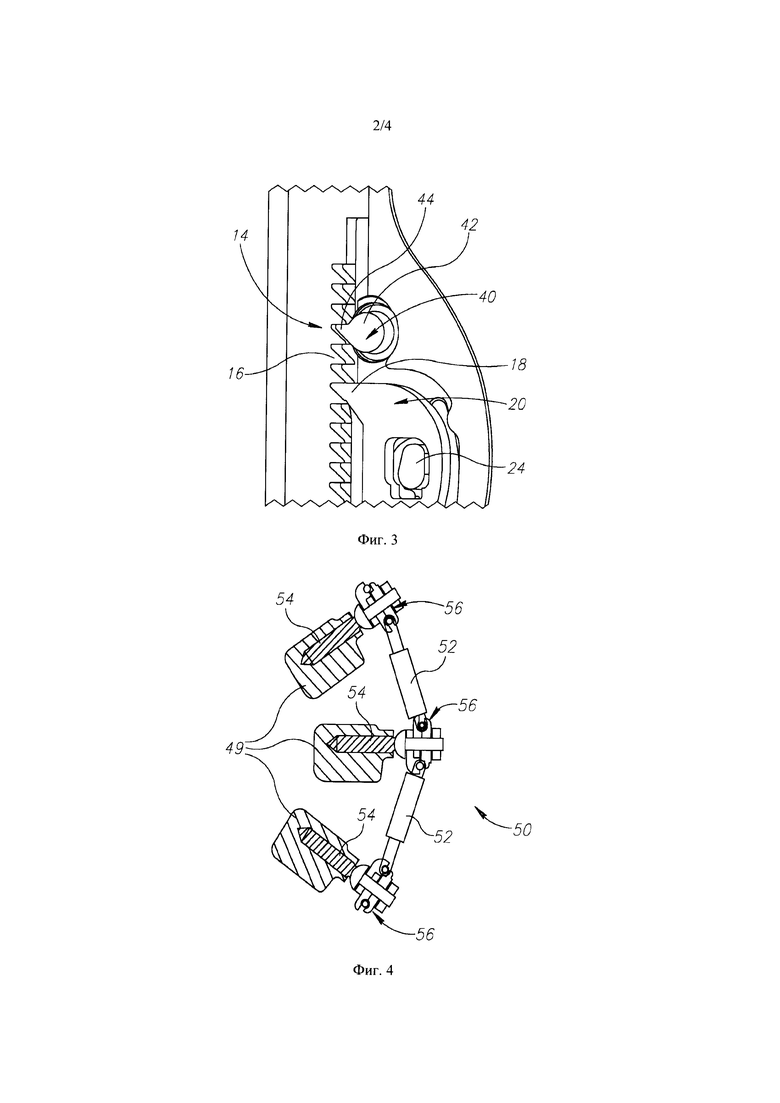
на фиг. 3 в упрощенном виде проиллюстрирован силовой аппликатор, способный регулировать или продвигать храповой механизм спинального устройства с храповым механизмом, показанного на фиг. 1,
на фиг. 4 в упрощенном виде наглядно проиллюстрировано спинальное устройство, содержащее два стрежня в сборе, которые установлены между тремя позвонками с помощью трех костных винтов, и соединительный узел, допускающий множество степеней подвижности, сконструированное и действующее согласно одному из неограничивающих вариантов осуществления настоящего изобретения,
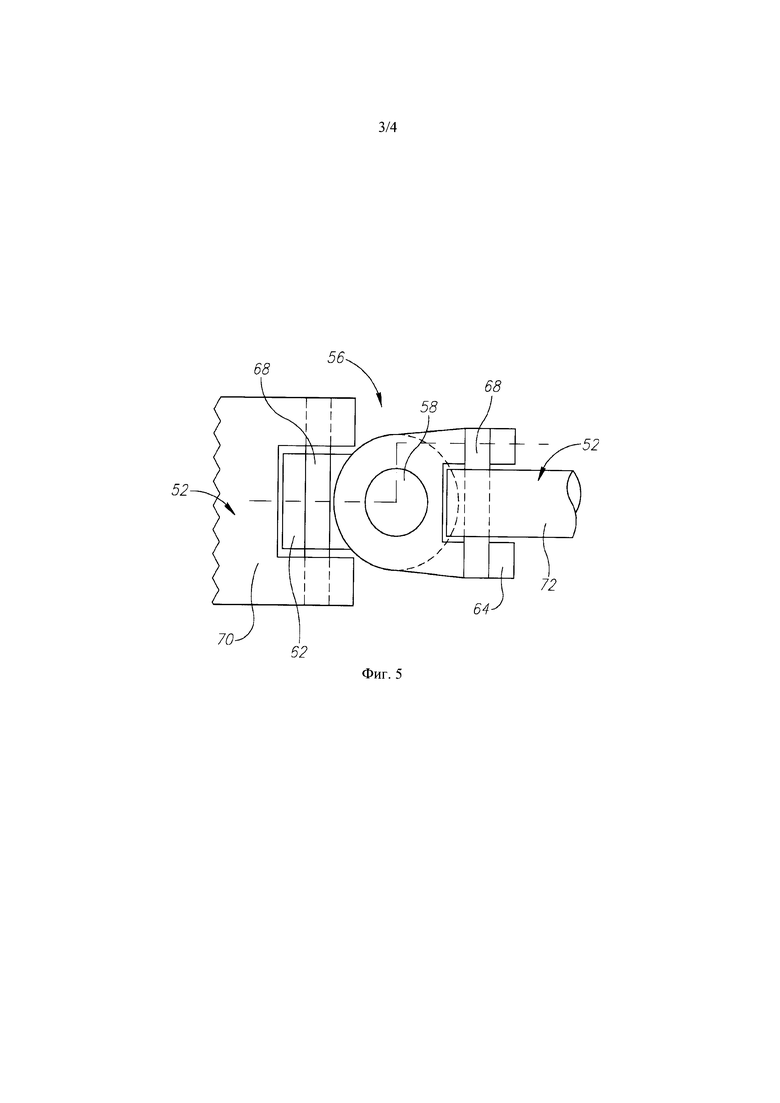
на фиг. 5 показан упрощенный вид сверху одного из предпочтительных вариантов осуществления соединителя в сборе,
на фиг. 6А показан упрощенный вид в поперечном разрезе варианта осуществления, проиллюстрированного на фиг. 5,
на фиг. 6Б показан упрощенный вид в поперечном разрезе модифицированной разновидности варианта осуществления, проиллюстрированного на фиг. 5.
Подробное описание вариантов осуществления
Рассмотрим фиг. 1-3, на которых проиллюстрировано спинальное устройство 10 с храповым механизмом, сконструированное и действующее согласно одному из неограничивающих вариантов осуществления изобретения.
Спинальное устройство 10 с храповым механизмом содержит элемент 12 переменной длины. В проиллюстрированном варианте осуществления элементом 12 переменной длины является стержень. Термином "стержень" обозначается любой тонкий элемент любого размера и формы в поперечном сечении, такой как без ограничения стержень, рейка, проволока и т.п.
Как описано в патентной заявке PCT/US 2011/035278, спинальное устройство 10 содержит храповой механизм 14 (фиг. 2), имеющий рабочую конфигурацию, позволяющую изменять длину элемента 12 переменной длины в одном направлении и предотвращать изменение длины элемента 12 переменной длины в противоположном направлении. Храповой механизм 14 имеет храповые зубья 16 (фиг. 3; также называемые зубчатой рейкой 16), выполненные вдоль осевого участка элемента 12 переменной длины, и собачку 18 (фиг. 2, 3), захватывающую один из зубьев 16. Собачка 18 отходит от управляющего элемента 20 (фиг. 2), установленного вокруг шарнира 22 (фиг. 2) и снабженного эксцентриковым кулачком 24 (фиг. 2-3). При повороте эксцентрикового кулачка 24 собачка 18 перемещается в одно из трех положений: а) положение храпового зацепления с зубьями 16, в котором элемент 12 переменной длины может пошагово перемещаться в одном направлении, б) положение фиксации с зубьями 16, в котором элемент 12 переменной длины вообще не может перемещаться, и в) положение вне зацепления с зубьями 16, в котором элемент 12 переменной длины может свободно перемещаться в обоих направлениях.
Как показано на фиг. 1, один конец 23 элемента 12 переменной длины рассчитан на линейное перемещение через отверстие 28 в корпусе 30. Элемент 12 переменной длины содержит два многоосных сочленяющих крепежных элемента 32. Оба многоосных сочленяющих крепежных элемента 32 используются для крепления устройства 10 к доступной костной структуре позвоночника.
В отличие от патентной заявки PCT/US 2011/035278, спинальное устройство 10 согласно настоящему изобретению содержит силовой аппликатор 40 для управления храповым механизмом 14. Силовой аппликатор 40 содержит без ограничения кулачок 42, который имеет зуб 44 (фиг. 3). На фиг. 2 показана головка 46 кулачка 42 (например, шестиугольная головка); на фиг. 3 головка 46 не показана для простоты. При повороте головки 46 с помощью соответствующего инструмента, такого как гаечный ключ (не показанный), по часовой стрелке на фиг. 3 зуб 44 кулачка 42 принудительно перемещает зубчатую рейку 16 (вверх на фиг. 3), в результате чего зуб, в зацеплении с которым находится собачка 18, выходит из зацепления с собачкой 18, а следующий по направлению вниз зуб зубчатой рейки 16 входит в зацепление с собачкой 18. Соответственно, силовой аппликатор 40 регулирует или продвигает храповой механизм 14.
Рассмотрим фиг. 4, на которой проиллюстрировано спинальное устройство 50, согласно одному из вариантов осуществления настоящего изобретения.
В проиллюстрированном варианте осуществления спинальное устройство 50 содержит два стержневых узла 52, которые установлены между тремя позвонками 49 с помощью трех костных винтов 54. Стержневые узлы 52 могут быть без ограничения сконструированы как спинальные устройства 10 с храповым механизмом или другие спинальные устройства. Стержневые узлы 52 соединены составными соединительными узлами 56. Соединительные узлы 56 допускают множество степеней подвижности стержневых узлов 52 (например, элементов переменной длины 12), как пояснено далее.
Следует отметить, что может быть выбрано любое число позвонков, поскольку система имеет модульную конструкцию. Следует также отметить, что среднее составное соединение двух стержневых узлов 52 необязательно должно соединяться с каким-либо позвонком, то есть один или несколько позвонков могут быть пропущены в зависимости от применения. Как показано на чертежах, костные винты 54 вставлены в ножки, но могут использоваться другие положения.
Рассмотрим фиг. 5 и 6А, на которых проиллюстрирован один из предпочтительных вариантов осуществления соединительного узла 56.
Соединительный узел 56 содержит болт 58 (например, центральный болт с резьбой), имеющий головку 60 и проходящий через отверстие в первом шарнирном элементе 62 и во втором шарнирном элементе 64, который может находиться сверху или вблизи первого шарнирного элемента 62. Каждый шарнирный элемент имеет канал 66 (фиг. 6А) для шарнирного пальца 68 (фиг. 5). Один из шарнирных пальцев 68 шарнирно установлен на конце 70 одного из стержневых узлов 52, а другой шарнирный палец 68 установлен на конце 72 другого стержневого узла 52 (фиг. 5). Соответственно, соединительный узел 56 позволяет соседним стержневым узлам 52 поворачиваться относительно друг друга. Пальцы 68 фиксируются на месте (фиг. 6А) фиксатором 74 (таким как гайка). Другой фиксатор 76 (такой как гайка) навинчивается на конец болта 58 с резьбой, чтобы завершить сборку (фиг. 6А).
На фиг. 6Б проиллюстрирована одна из разновидностей варианта осуществления, проиллюстрированного на фиг. 6А. Одинаковые элементы обозначены одинаковыми позициями. Основным отличием является форма фиксатора 74 и то, что канал 66 в первом шарнирном элементе 62 имеет закрытый конец, а не открытый конец, как показано на фиг. 6А. Возможны также другие разновидности, входящие в объем изобретения.
Соединительные узлы 56 допускают множество степеней подвижности стержневых узлов 52. Допускается поворот вокруг продольной оси центрального болта 58 с резьбой и независимо вокруг продольной оси каждого пальца 68, перпендикулярной продольной оси центрального болта 58 с резьбой.
| название | год | авторы | номер документа |
|---|---|---|---|
| ПОЗВОНОЧНОЕ УСТРОЙСТВО С ХРАПОВЫМ МЕХАНИЗМОМ | 2011 |
|
RU2563591C2 |
| Спинальный кейдж | 2013 |
|
RU2615666C2 |
| РЕГУЛИРУЕМЫЙ СПИНАЛЬНЫЙ ПРОТЕЗ | 2005 |
|
RU2387403C2 |
| СИСТЕМА ДЛЯ ЗАДНЕЙ ФИКСАЦИИ ПОЗВОНОЧНИКА ПЛАСТИНОЙ | 2012 |
|
RU2605147C2 |
| ВВЕДЕНИЕ АНТЕРИОРНЫХ И ПОСТЕРИОРНЫХ СПИНАЛЬНЫХ ПРОТЕЗОВ | 2006 |
|
RU2400186C2 |
| ДИСТРАКТОР | 2001 |
|
RU2212205C2 |
| ХИРУРГИЧЕСКОЕ УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ ДЕФОРМАЦИЙ ПОЗВОНОЧНИКА | 2009 |
|
RU2526425C2 |
| БЛОКИРУЮЩЕЕ УСТРОЙСТВО, РЕГУЛИРОВОЧНОЕ УСТРОЙСТВО РЕМНЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА И РЕМЕНЬ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 2013 |
|
RU2622525C2 |
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ СКОЛИОТИЧЕСКОЙ ДЕФОРМАЦИИ | 2001 |
|
RU2206289C2 |
| УСТРОЙСТВО ДЛЯ ХОДЬБЫ | 1994 |
|
RU2116063C1 |


Группа изобретений относится к медицине. Спинальное устройство содержит элемент переменной длины с храповым механизмом и силовой аппликатор, способный регулировать или продвигать храповой механизм. Храповой механизм имеет рабочую конфигурацию, допускающую изменение длины элемента переменной длины в одном направлении и предотвращение изменения длины элемента переменной длины в противоположном направлении. Элемент переменной длины содержит многоосные сочленяющие крепежные элементы для крепления к кости с возможностью поворота вокруг нескольких осей. Силовой аппликатор способен регулировать или продвигать храповой механизм. Силовой аппликатор содержит кулачок, имеющий зуб, который входит в зацепление с зубчатой рейкой храпового механизма. Спинальное устройство содержит пару вышеуказанных спинальных устройств и соединительный узел, который образует составное соединение между спинальными устройствами, допускающее множество степеней подвижности спинальных устройств. Изобретение обеспечивает расширение арсенала технических средств. 2 н. и 3 з.п. ф-лы, 6 ил.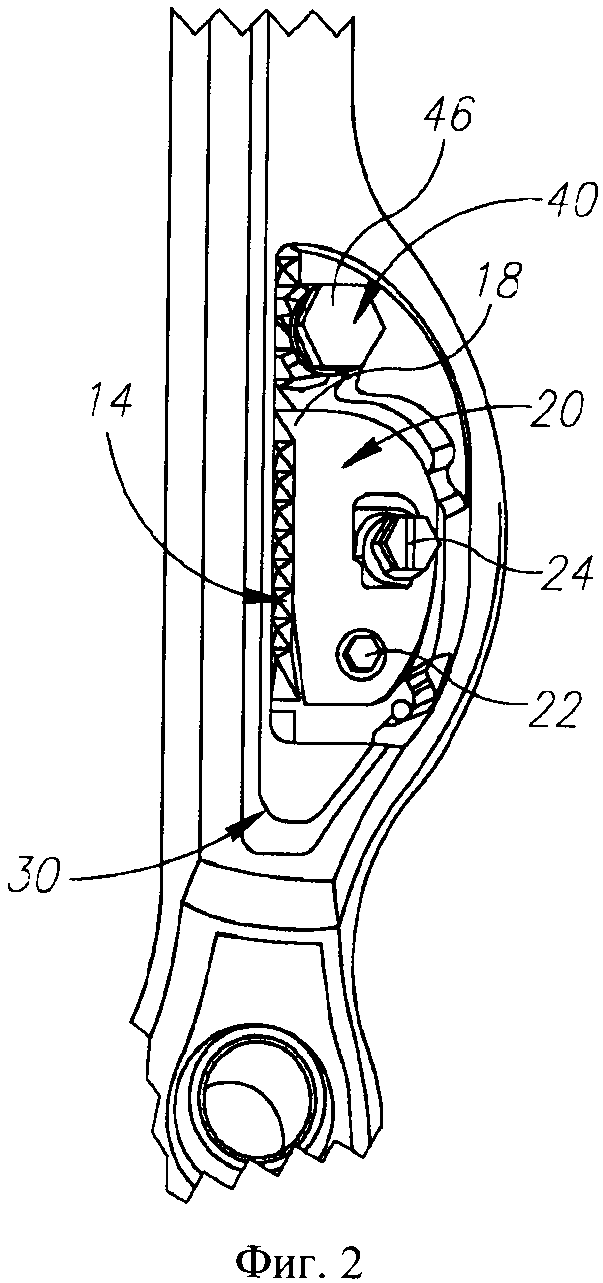
1. Спинальное устройство (10) содержащее:
элемент (12) переменной длины с храповым механизмом (14), имеющим рабочую конфигурацию, допускающую изменение длины элемента (12) переменной длины в одном направлении и предотвращение изменения длины элемента (12) переменной длины в противоположном направлении, при этом элемент (12) переменной длины содержит многоосные сочленяющие крепежные элементы (32) для крепления к кости с возможностью поворота вокруг нескольких осей,
отличающееся тем, что содержит силовой аппликатор (40), способный регулировать или продвигать храповой механизм (14), при этом силовой аппликатор (40) содержит кулачок (42), имеющий зуб (44), который входит в зацепление с зубчатой рейкой (16) храпового механизма (14).
2. Спинальное устройство (50), содержащее пару спинальных устройств (10) по п. 1 и соединительный узел (56), который образует составное соединение между спинальными устройствами (10), допускающее множество степеней подвижности спинальных устройств (10).
3. Спинальное устройство (50) по п. 2, дополнительно содержащее соединительный узел (56), образующий составное соединение между элементами (12) переменной длины, допускающее множество степеней подвижности элементов (12) переменной длины.
4. Спинальное устройство (50) по п. 3, в котором соединительный узел (56)содержит болт (58), проходящий через первый шарнирный элемент (62) и второй шарнирный элемент (64), находящийся вблизи первого шарнирного элемента (62), и шарнирные пальцы (68), шарнирно соединяющие спинальные устройства (10) с первым шарнирным элементом (62) и вторым шарнирным элементом (64).
5. Спинальное устройство (50) по п. 4, в котором соединительный узел (56) допускает поворот вокруг продольной оси болта (58) и независимо вокруг продольной оси каждого шарнирного пальца (68), перпендикулярной продольной оси болта (58).
| US 2009306717 A1, 10.12.2009 | |||
| УСТРОЙСТВО ДЛЯ КОРРЕКЦИИ СКОЛИОТИЧЕСКОЙ ДЕФОРМАЦИИ | 2001 |
|
RU2206289C2 |
| УСТРОЙСТВО ДЛЯ ПРОВЕДЕНИЯ СТАБИЛИЗИРУЮЩЕЙ ОПЕРАЦИИ НА ПОЗВОНОЧНИКЕ (ЕГО ВАРИАНТЫ) И СПОСОБ ПРОВЕДЕНИЯ СТАБИЛИЗИРУЮЩЕЙ ОПЕРАЦИИ НА ПОЗВОНОЧНИКЕ | 2004 |
|
RU2285483C2 |
| US 2011270314 A1, 03.11.2011 | |||
| US 2010152734 A1, 17.06.2010 | |||
| US 20060149237 A1, 06.07.2006 | |||
| US 2002183757 A1, 05.12.2002. | |||

