Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур.
Известна функциональная структура выдвижных элементов зажима (удержания) и их позиционное расположение внутри сферического корпуса многофункциональной диагностико-хирургической робототехнической системы с возможностью информационно-компьютерного управления (см. Патент UA №72484), которое включает корпус и выдвижные элементы зажима, которые включают устройство зажима операционных элементов (инструментов) с возможностью двух разворотов и соединенного с устройством промежуточного разворота с помощью первого привода, выполняющего функцию шарнира, который с помощью второго привода, который выполняет также функцию шарнира, соединенный с дополнительным устройством осевого разворота зажима, который соединен с корпусом роторной частью привода, закрепленной на выдвижной части линейного привода. При этом корпус робототехнической системы выполнен с внешней сферической поверхностью и с боковым отверстием круглой формы, напротив которого с внутренней стороны сферического корпуса последовательно по кругу расположены и закреплены пять корпусов линейного повода выдвижных элементов зажима, один из их расположен в верхней части сферического корпуса и его выдвижные элементы зажима расположены в вертикальной плоскости сферического корпуса в зоне отверстия круглой формы, по обе стороны вертикальной плоскости сферического корпуса друг над другом расположены по два линейных повода, при этом выдвижные элементы зажима расположены в зоне отверстия круглой формы сферического корпуса, при этом выдвижные элементы зажима верхних линейных поводов позиционно ориентированы к вертикальной плоскости сферического корпуса, а выдвижные элементы зажима нижних линейных поводов позиционно ориентированы от вертикальной плоскости сферического корпуса (прототип).
Известный прототип имеет технические возможности, которые заключаются в том, что выдвижные элементы удержания диагностических и хирургический элементов с линейными приводами в исходном положении находятся в закрытом корпусе робототехнической системы.
Недостатком известной функциональной структуры выдвижных элементов зажима (удержания) диагностических и хирургических корпусов (устройств) с зафиксированными линейными приводами в общем корпусе является функциональная незаконченность робототехнической системы, поскольку она не включает в единой своей конструкции функциональную структуру инструментального стола, где в определенной последовательности расположены диагностические и хирургические корпусы (устройства).
Техническим результатом предложенного изобретения является усовершенствование известной функциональной структуры возвратно-поступательного подъема и разворота элементов в выдвижном механизме удержания корпусов диагностических и хирургических устройств.
Указанный технический результат достигается следующей функциональной структурой.
Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая нижнюю и верхнюю части общего корпуса с отверстием круглой формы с крышкой сферической формы, напротив которого с внутренней стороны общего корпуса последовательно по кругу расположены корпусы линейных поводов с выдвижными элементами с приводами разворота в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры» и с устройством удержания диагностических и хирургических устройств, а также включающая подшипники кругового разворота выдвижных элементов и привод кругового разворота с шестеренкой на роторе, которая функционально связана с соосной шестеренкой общего разворота выдвижных элементов, при этом нижняя и верхняя части общего корпус выполнены тороидальной формы, а отверстие круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого соосно ему расположено с возможностью подъема крышка тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка сферической формы, функционально связанная с крышкой тороидальной формы для их совместного вертикального подъема при выполнении медицинских процедур, при этом нижняя часть общего тороидального корпуса выполнена плоской формы, над внутренней поверхности которой расположена общая опорная пластина круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом, на котором в средней части с равным шагом зафиксированы ортогонально ориентированные корпусы линейных приводов, выдвижная часть которых ориентирована вертикально вверх, на конце которой закреплена ось разворота первого из четырех последовательных выдвижных элементов с устройством удержания диагностических и хирургических устройств, при этом внутренний край общей опорной пластины круглой формы выполнен в виде усеченного цилиндра и ориентирован он вертикально вниз, на котором закреплены несколько подшипников разворота с возможностью соосного разворота на плоской внутренней поверхности нижней части общего тороидального корпуса, а на краю внешней поверхности общей опорной пластины круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом зафиксирован один или несколько приводов кругового разворота с шестеренкой на роторе, а соосная шестеренка общего разворота выдвижных элементов зафиксирована или выполнена внутри нижней части общего тороидального корпуса.
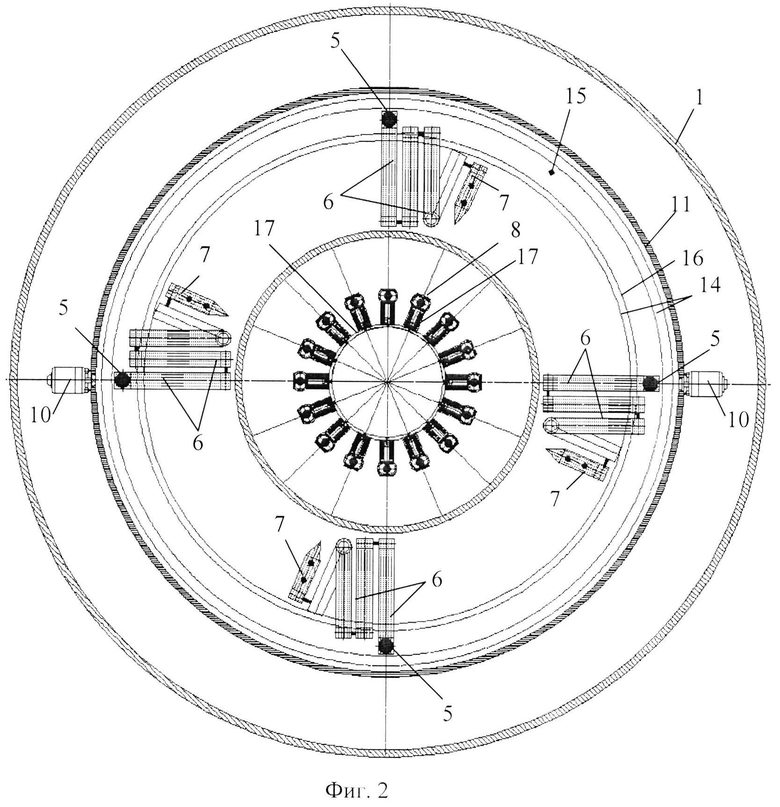
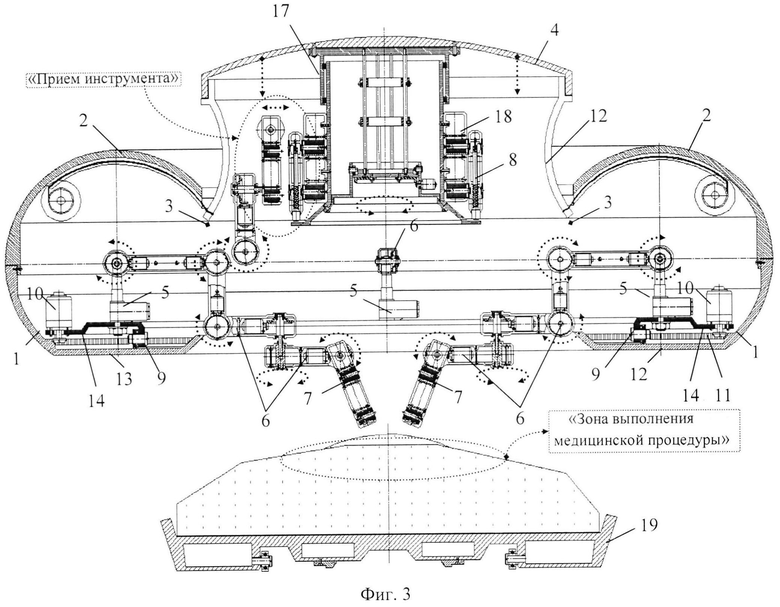
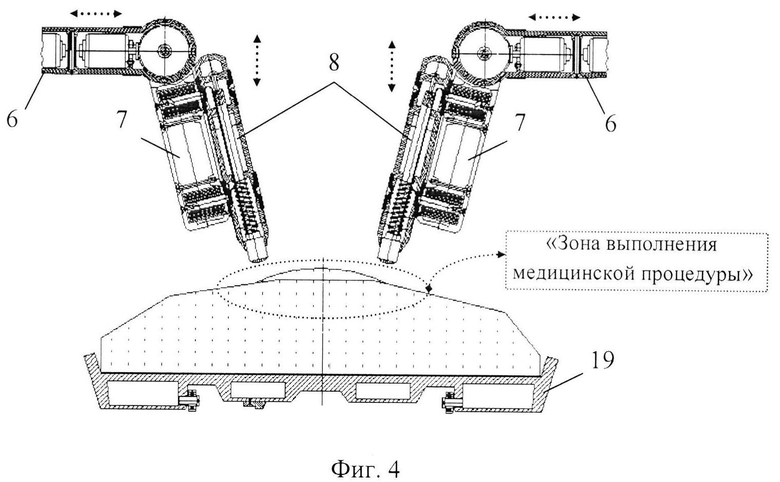
На фиг. 1 изображена тороидальная хирургическая робототехническая система с выдвижной крышкой, которая находится в исходном положении. На фиг. 2 изображено позиционное расположение в общем тороидальном корпусе на общей опорной пластине линейных приводов со свернутыми выдвижными элементами. На фиг. 3 изображена тороидальная хирургическая робототехническая система с вертикально смещенной выдвижной крышкой. На фиг. 4 изображено позиционное положение выдвижного механизма электромагнитного удержания корпусов диагностических и хирургических устройств в «Зоне выполнения медицинской процедуры.
Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая (фиг. 1) нижнюю 1 и верхнюю 2 части общего корпуса с отверстием 3 круглой формы и с крышкой 4 сферической формы с возможностью смещения, при этом напротив отверстия 3 круглой формы с внутренней стороны общего корпуса последовательно по кругу (фиг. 1 и 2) расположены линейные приводы 5 с выдвижными элементами 6 с приводами для их разворота (фиг. 3) в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры» и с устройством удержания 7 диагностических и хирургических устройств 8 (фиг. 4), а также включающая подшипники 9 кругового разворота выдвижных элементов 6 и привод кругового разворота 10 с шестеренкой на роторе, которая функционально связана шестеренкой 11 общего разворота выдвижных элементов 6. При этом нижняя 1 и верхняя 2 части общего корпус выполнены тороидальной формы, а отверстие 3 круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого соосно ему расположена с возможностью подъема крышка 12 тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка 4 сферической формы, функционально связанная с крышкой 12 тороидальной формы для их совместного вертикального подъема при выполнении медицинских процедур. При этом в нижней 1 части общего тороидального корпуса ее нижняя часть 13 выполнена плоской формы, в которой над внутренней поверхностью расположена общая опорная пластина 14 круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом 15, на котором с равным шагом по кругу (фиг. 2) зафиксированы ортогонально ориентированные корпусы линейных приводов 5, выдвижная часть которых ориентирована вертикально вверх, на конце которой зафиксирована с возможностью разворота ось первого из четырех последовательных выдвижных элементов 6 с устройством удержания 7 диагностических и хирургических устройств 8, при этом внутренний край 16 общей опорной пластины 14 круглой формы выполнен в виде усеченного цилиндра и ориентирован он вертикально вниз, на котором закреплены несколько подшипников 9 с возможностью соосного разворота на плоской внутренней поверхности нижней части 13 общего тороидального корпуса, а на краю внешней поверхности общей опорной пластины 14 круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом 15 зафиксирован один или несколько приводов 10 кругового разворота с шестеренкой на роторе, а соосная шестеренка 11 общего разворота выдвижных элементов 6 зафиксирована или выполнена внутри нижней части 1 общего тороидального корпуса. На фиг. 1 и 3 изображена тороидальная хирургическая робототехническая система с выдвижной крышкой 4 сферической формы, внутри которой и соосно ей закреплена цилиндрическая часть 17 инструментального стола с устройством соосного разворота электромагнитных устройств 18 фиксации диагностических и хирургических устройств 8. На фиг. 4 изображено одно из возможных позиционных положений электромагнитных устройств удержания 7 выдвижной системы 6 с хирургическими и диагностическими устройствами 8 в «Зоне выполнения медицинской процедуры» над подвижной частью медицинского стола 19, которая реализована с возможностью возвратно-поступательного смещения относительно тороидальной робототехнической системы (фиг. 3).
Процедура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой заключается в следующем.
Перед началом выполнения медицинских процедур (в исходном положении фиг. 1) в тороидальной хирургической робототехнической системе (фиг. 1) крышка тороидальной формы 12 с крышкой 4 сферической формы, которая включает устройство соосного разворота электромагнитных устройств 17 фиксации диагностических и хирургических устройств 8, позиционно расположена напротив бокового отверстия 3 круглой формы, которое выполнено с внутренней стороны нижней 1 и верхней 2 части тороидального общего корпуса. При этом в нижней 1 части общего тороидального корпуса ее нижняя часть 13 выполнена плоской формы, в которой над внутренней поверхностью расположена общая опорная пластина 14 круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом 15, на котором с равным шагом по кругу (фиг. 2) зафиксированы ортогонально ориентированные корпусы линейных приводов 5, выдвижная часть которых ориентирована вертикально вверх, на конце которой зафиксирована с возможностью разворота ось первого из четырех последовательных выдвижных элементов 6 с устройством удержания 7 диагностических и хирургических устройств 8. При этом внутренний край 16 общей опорной пластины 14 круглой формы выполнен в виде усеченного цилиндра и ориентирован он вертикально вниз, на котором закреплены несколько подшипников 9 с возможностью соосного разворота на плоской внутренней поверхности нижней части 13 общего тороидального корпуса, а на краю внешней поверхности общей опорной пластины 14 круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом 15 зафиксирован один или несколько приводов 10 кругового разворота с шестеренкой на роторе, а соосная шестеренка 11 общего разворота выдвижных элементов 6 зафиксирована или выполнена внутри нижней части 1 общего тороидального корпуса. При выполнении медицинской процедуры выполняют поднятие (фиг. 3) крышки тороидальной формы 12 с устройством соосного разворота электромагнитных устройств 17 фиксации диагностических и хирургических устройств 8 для формирования зоны «Приема инструмента» и разворачивают выдвижные элементы 6 предварительно в зону «Приема инструмента» для выбора необходимого хирургического или диагностического устройства 7 и посредством электромагнитных устройств удержания 7 выдвижной системы 6 фиксируют их, а затем разворачивают выдвижные элементы 6 в «Зону выполнения медицинской процедуры», которая может быть смещена над подвижной частью медицинского стола 19, поскольку она выполнена с возможностью возвратно-поступательного смещения относительно тороидальной хирургической робототехнической системы. При этом поперечное смещение диагностических и хирургических устройств 7 относительно подвижной части медицинского стола 19 выполняют посредством соответствующего разворота выдвижных элементов 6, а вертикальное возвратно-поступательное смещение диагностических и хирургических устройств 7 относительно подвижной части медицинского стола 19 выполняют посредством линейных приводов 5. При этом посредством приводов 10 разворота, которые закреплены на общей опорной пластине 14 круглой формы и шестеренки 11, которая зафиксирована внутри нижней части 1 общего тороидального корпуса, осуществляют общий соосный разворот выдвижных элементов 6 внутри тороидальной хирургической робототехнической системы.
Использование предложенного технического решения позволяет расширить процедурные возможности функциональной структуры возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой.
Изобретение относится к медицинской технике и может быть использовано при выполнении различных медицинских процедур. Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая нижнюю и верхнюю части общего корпуса с боковым отверстием круглой формы с крышкой сферической формы, напротив которого с внутренней стороны корпуса последовательно по кругу расположены корпусы линейных приводов с выдвижными элементами с приводами разворота в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры», с устройством удержания диагностических и хирургических устройств, при этом нижняя и верхняя части общего корпуса выполнены тороидальной формы, а отверстие круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого соосно ему расположены с возможностью подъема крышка тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка сферической формы, функционально связанная с крышкой тороидальной формы для их совместного вертикального подъема при выполнении медицинских процедур, при этом нижняя часть общего тороидального корпуса выполнена плоской формы, над внутренней поверхностью которой расположена общая опорная пластина круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом, на котором в средней части с равным шагом зафиксированы ортогонально ориентированные корпусы линейных приводов, выдвижная часть которых ориентирована вертикально вверх, на конце которой закреплена ось разворота первого из четырех последовательных выдвижных элементов с устройством удержания диагностических и хирургических устройств. 4 ил.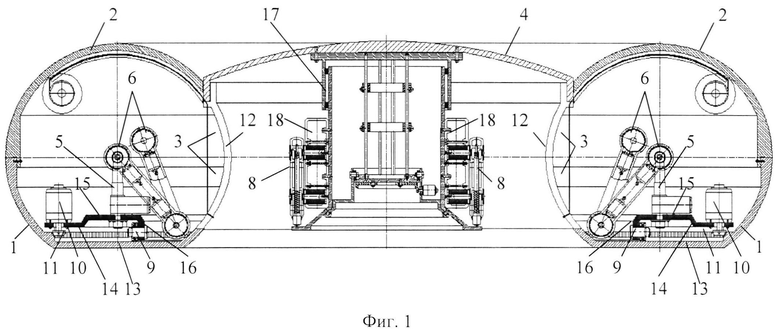
Функциональная структура возвратно-поступательного подъема и разворота элементов в выдвижном механизме электромагнитного удержания корпусов диагностических и хирургических устройств в тороидальной хирургической робототехнической системе с выдвижной крышкой, включающая нижнюю и верхнюю части общего корпуса с отверстием круглой формы с крышкой сферической формы, напротив которого с внутренней стороны общего корпуса последовательно по кругу расположены корпусы линейных приводов с выдвижными элементами с приводами разворота в «Зону приема инструмента» и в «Зону выполнения медицинской процедуры» и с устройством удержания диагностических и хирургических устройств, а также включающая подшипники кругового разворота выдвижных элементов и привод кругового разворота с шестеренкой на роторе, которая функционально связана с соосной шестеренкой общего разворота выдвижных элементов, отличающаяся тем, что нижняя и верхняя части общего корпус выполнены тороидальной формы, а отверстие круглой формы выполнено с внутренней стороны тороидального общего корпуса, напротив которого соосно ему расположено с возможностью подъема крышка тороидальной формы, над которой также с возможностью подъема соосно зафиксирована крышка сферической формы, функционально связанная с крышкой тороидальной формы для их совместного вертикального подъема при выполнении медицинских процедур, при этом нижняя часть общего тороидального корпуса выполнена плоской формы, над внутренней поверхностью которой расположена общая опорная пластина круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом, на котором в средней части с равным шагом зафиксированы ортогонально ориентированные корпусы линейных приводов, выдвижная часть которых ориентирована вертикально вверх, на конце которой закреплена ось разворота первого из четырех последовательных выдвижных элементов с устройством удержания диагностических и хирургических устройств, при этом внутренний край общей опорной пластины круглой формы выполнен в виде усеченного цилиндра и ориентирован он вертикально вниз, на котором закреплены несколько подшипников разворота с возможностью соосного разворота на плоской внутренней поверхности нижней части общего тороидального корпуса, а на краю внешней поверхности общая опорная пластина круглой формы с внутренним соосным круглым отверстием и с круглым вертикальным выступом зафиксирован один или несколько приводов кругового разворота с шестеренкой на роторе, а соосная шестеренка общего разворота выдвижных элементов зафиксирована или выполнена внутри нижней части общего тороидального корпуса.
| Способ получения альфа-оксиантрахинонсульфоновых кислот | 1947 |
|
SU72484A1 |
| Способ борьбы с искажениями телеграфных сигналов | 1946 |
|
SU72485A1 |
| Метод распознавания окисляющих углеводороды бактерий при геомикробиологической разведке нефтяных и газовых месторождений | 1947 |
|
SU72498A1 |
| Устройство для стереотаксических операций | 1985 |
|
SU1306572A1 |
| JPH 06205809 A, 26.07.1994 | |||

