Область техники
Изобретение относится, в целом, к области защиты и управления оборудованием электроэнергетических систем и, в частности, к управляющим устройствам и способам для них.
Предшествующий уровень техники
Интеллектуальные электронные устройства (IED) - это устройства, которые используются для защиты, управления и наблюдения за сетью энергетической системы. IED принимает данные от датчиков и энергетического оборудования и может выдавать управляющие команды, такие как команды на отключение для размыкания, например, прерывателей цепи, контакторов или контактных переключателей, если они обнаруживают аномалии напряжения, тока или частоты, или может выполнять команду замыкания для замыкания прерывателя цепи или повышения/понижения уровней напряжения для того, чтобы поддерживать требуемый уровень.
IED выполняет специальные прикладные функции на платформе, которая содержит аппаратные и программно-аппартные средства. Аппаратная платформа типично содержит аналоговую часть управления, например, трансформаторные модули или аналого-цифровое (A/D) преобразование, и предоставляет входные данные, представленные главному центральному процессору/цифровому сигнальному процессору (CPU/DSP) для обработки. Главный CPU/DSP - место, где прикладные функции выполняются в рабочей среде. Бинарные данные состояния из сети энергосистемы передаются через модули бинарного ввода в CPU/DSP для обработки и логического вычисления. Команды для процесса, например, такого процесса как размыкание или замыкание прерывателя цепи, выполняются посредством модулей бинарного вывода. Все модули ввода/вывода либо аналогового, либо булевого типа обмениваются данными с главным CPU/DSP через соединительную плату обмена данными или внешнюю полевую/процессную шину. Кроме того, IED может поддерживать экран локального машинного интерфейса, порты обмена данными и порты синхронизации времени.
Управляемое переключение, или переключение на основе точки на кривой, прерывателей цепи очень желательно в сети энергетической системы. Кратковременные возмущения в энергетических системах могут повреждать оборудование энергетической системы, и такие переходные напряжение и ток могут быть привнесены во время обычных операций переключения, например, во время операций размыкания/замыкания прерывателя цепи. Посредством управляемого переключения прерывателя цепи негативные переходные состояния могут быть сильно уменьшены. Одно из самых распространенных применений управляемого переключения прерывателей цепи реализуется в шунтирующих конденсаторных батареях (SCB), во время которого могут возникать кратковременные повышения напряжения большой величины и большой частоты. Другие примеры применения содержат наборы катушек индуктивности и секции силового трансформатора.
При управляемом переключении датчики, такие как трансформаторы напряжения, используются для измерения напряжений на обеих сторонах прерывателя цепи, и/или датчик, такой как трансформатор тока, используется для измерения тока через прерыватель цепи. В алгоритмах, используемых для определения того, когда замыкать прерыватель цепи, используются параметры, такие как разность напряжения, разность частоты и разность фаз между обеими сторонами прерывателя тока. В случае, когда нужно размыкать прерыватель цепи, условия и алгоритм могут отличаться от условий и алгоритма, используемых для замыкания прерывателя цепи. Алгоритмы для вычисления такой синхронизации известны.
Реализация переключения на основе точки на кривой содержит хорошо известные алгоритмы для определения лучшей точки для переключения. В некоторых применениях, но необязательно для всех видов применений, пересечение нулевого тока является оптимальным, обеспечивающим наименьшую величину тока для прерывания прерывателем тока, таким образом, обеспечивая самое безопасное возможное прерывание и дополнительно, например, минимизируя износ на контакторах прерывателя цепи и другое повреждение электроэнергетической системы или оборудования.
Однако фактически совершать переключение в желаемой точке переключения может быть затруднительным, даже когда используются подходящие алгоритмы для вычисления. Одной трудностью являются различные типы временных задержек. Примером такой временной задержки является время срабатывания прерывателя цепи, т.е., время, чтобы прерыватель цепи фактически замкнулся (время от возбуждения замыкающей катушки до момента, когда контакты замыкаются), которое, например, может составлять несколько миллисекунд. CPU/DSP в IED может быть выполнен с возможностью компенсировать это время срабатывания прерывателя цепи, поскольку времена срабатывания, как правило, хорошо известны.
Однако же, могут быть дополнительные задержки, привнесенные в IED. В качестве другого примера, когда CPU/DSP в IED передает сигнал аварийного выключения модулю вывода, этот обмен данными проводится в ранее упомянутой соединительной плате обмена данными или внешней полевой/процессной шине. Задержки могут быть привнесены в эту соединительную плату обмена данными или внешнюю полевую/процессную шину, и модуль вывода, таким образом, выводит сигнал аварийного выключения позже, чем предполагается, и прерыватель цепи срабатывает в другой момент времени, чем предполагается.
Из вышесказанного ясно, что существует необходимость в улучшении этой ситуации в этой области технологии.
Краткое изложение сущности изобретения
Задачей изобретения является преодоление или, по меньшей мере, смягчение вышеупомянутого недостатка. В частности, задачей изобретения является обеспечение улучшенной точности операционных команд, отправленных от управляющего устройства, такого как интеллектуальное электронное устройство.
Задача согласно одному аспекту решается посредством управляющего устройства для управления прерывателем цепи. Управляющее устройство содержит центральный процессор, который выполнен с возможностью обмена данными с модулем вывода. Модуль вывода выполнен с возможностью вывода операционных команд к прерывателю цепи. Модуль вывода содержит средство обработки, выполненное с возможностью исполнения операционной команды в момент времени, полученный от центрального процессора. Посредством изобретения может быть получена такая улучшенная точность операционных команд. Команды могут отправляться от управляющего устройства с высокой точностью, которая, в свою очередь, влечет за собой улучшенную безопасность и защиту оборудования в электроэнергетической системе. Переключение, например переключение на основе точки на кривой, не зависит от внутреннего времени управляющего устройства, а также от времени передачи сообщения от центрального процессора к модулю вывода.
В варианте осуществления момент времени содержит абсолютное время во временной области, внутренней по отношению к управляющему устройству.
В варианте осуществления момент времени не зависит от времени передачи сообщения через соединительную плату обмена данными или полевую/процессную шину от центрального процессора к модулю вывода.
В варианте осуществления центральный процессор выполнен с возможностью обработки формы волны входного аналогового сигнала и команд для размыкания или замыкания прерывателя цепи; компенсации настраиваемого угла размыкания или замыкания формы волны и времени срабатывания прерывателя цепи; и передачи, на основе обработки и компенсации, момента времени от центрального процессора к модулю вывода, в который операционная команда должна быть передана модулем вывода к прерывателю цепи.
В варианте осуществления управляющее устройство дополнительно выполнено с возможностью обмена данными с модулем ввода. Модуль ввода выполнен с возможностью приема измерений от оборудования, такого как трансформатор тока и/или трансформатор напряжения, в электроэнергетической системе, в которой размещен прерыватель тока.
В варианте осуществления модуль ввода является аналоговым модулем ввода, и управляющее устройство дополнительно содержит аналого-цифровой преобразователь, выполненный с возможностью приема аналоговых данных от модуля ввода, преобразования аналоговых данных в цифровые данные, пропорциональные аналоговым данным, и вывода цифровых данных в центральный процессор.
В варианте осуществления управляющее устройство дополнительно содержит модуль бинарного ввода, выполненный с возможностью приема бинарных данных состояния от прерывателя цепи.
В варианте осуществления центральный процессор и модуль вывода синхронизированы.
В варианте осуществления операционная команда содержит команду размыкания или команду замыкания для прерывателя цепи, управляемого посредством управляющего устройства.
В варианте осуществления средство обработки модуля вывода содержит микроконтроллер или программируемую пользователем вентильную матрицу.
В варианте осуществления центральный процессор и модуль вывода обмениваются данными через соединительную плату обмена данными или внешнюю полевую/процессную шину. Модуль вывода может быть частью управляющего устройства или располагаться удаленно от него. В зависимости от компоновки обмен данными между модулями может быть выполнен так, чтобы выполняться через внутреннюю соединительную плату обмена данными или через внешнюю полевую/процессную шину. Таким образом, предоставляется гибкое решение, подходящее для удаленных устройств ввода/вывода, так же как и локальных устройств ввода/вывода.
Задача согласно второму аспекту решается посредством способа в управляющем устройстве для управления прерывателем цепи, причем управляющее устройство содержит центральный процессор и выполнено с возможностью обмена данными с модулем вывода. Модуль вывода выполнен с возможностью вывода операционных команд к прерывателю цепи. Способ содержит: обработку формы волны аналогового сигнала и команд для размыкания или замыкания прерывателя цепи; компенсацию настраиваемого угла размыкания или замыкания формы волны и времени срабатывания прерывателя цепи; и передачу, на основе обработки и компенсации, момента времени от центрального процессора к модулю вывода, в который операционная команда должна быть передана модулем вывода к прерывателю цепи. Получены преимущества, соответствующие ранее описанным преимуществам для управляющего устройства.
В варианте осуществления обработка формы волны аналогового сигнала содержит преобразование формы волны аналогового сигнала из частотной области в область внутреннего времени, которая известна CPU и модулю вывода.
Дополнительные признаки и преимущества изобретения станут ясны по прочтении последующего описания и сопровождающих чертежей.
Краткое описание чертежей
Фиг. 1 схематично иллюстрирует окружение, в котором могут быть реализованы варианты осуществления изобретения.
Фиг. 2 иллюстрирует управляющее устройство, реализующее варианты осуществления изобретения.
Фиг. 3 иллюстрирует график формы волны тока.
Фиг. 4 иллюстрирует блок-схему последовательности этапов способа аспекта изобретения.
Описание предпочтительных вариантов осуществления
В последующем описании, с целью объяснения, а не ограничения, излагаются конкретные детали, такие как конкретные архитектуры, интерфейсы, технологии и т.д., для того, чтобы обеспечивать полное понимание изобретения. Тем не менее, специалистам в данной области техники должно быть очевидным, что изобретение может осуществляться на практике в других вариантах осуществления, которые отступают от этих конкретных подробностей. В других случаях, подробные описания известных устройств, схем и способов опускаются с тем, чтобы не затруднять понимание описания изобретения необязательными подробностями. Одинаковые номера ссылаются на одинаковые элементы по всему описанию.
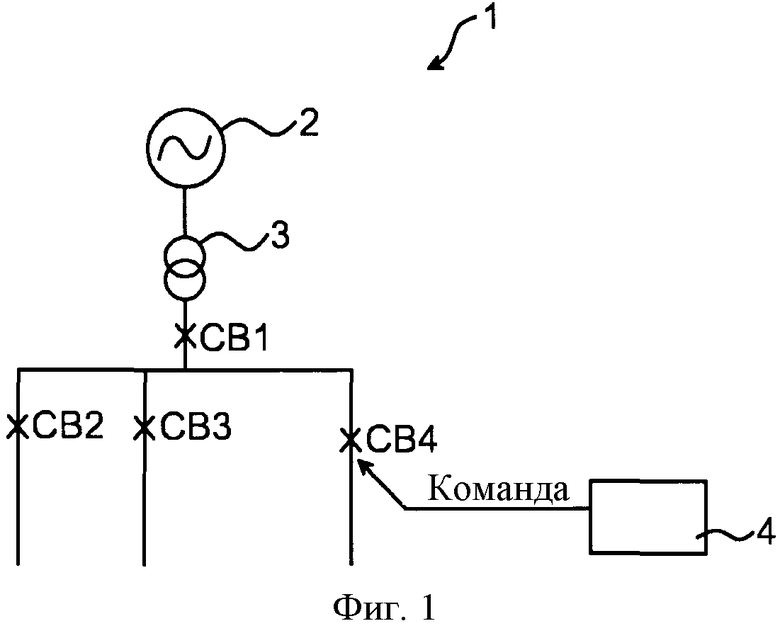
Фиг. 1 схематично иллюстрирует окружение, в котором могут быть реализованы варианты осуществления изобретения. В частности, фиг. 1 схематично иллюстрирует электроэнергетическую систему 1, содержащую множество прерывателей CB1, CB2, CB3, CB4 цепи, размещенных для защиты оборудования электроэнергетической системы 1. Такое оборудование может, например, содержать генераторы 2, трансформаторы 3, линии передачи или распределительные линии. Каждое такое оборудование или часть электроэнергетической системы 1 может быть скомпоновано с одним или более прерывателями CB1, CB2, CB3, CB4 цепи. Соответственные управляющие устройства 4 (только одно проиллюстрировано) выводят операционные команды соответствующему прерывателю CB1, CB2, CB3, CB4 цепи. На чертеже управляющее устройство 4 может, например, выводить (иллюстрировано стрелкой) операционные команды, такие как операции замыкания или размыкания, прерывателю CB4 цепи.
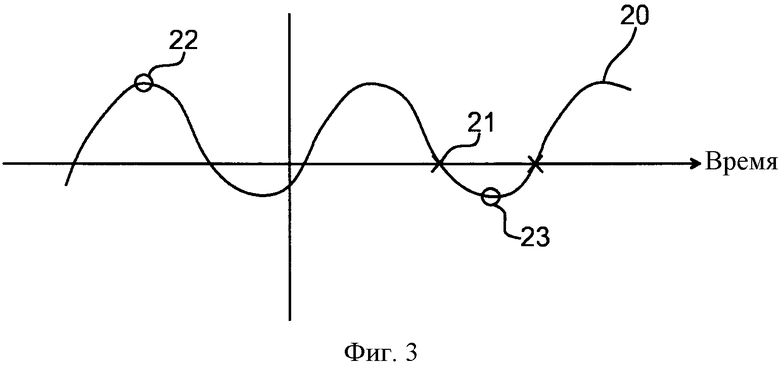
Фиг. 2 схематично иллюстрирует управляющее устройство 4, в котором могут быть реализованы варианты осуществления изобретения. Управляющее устройство 4, например, интеллектуальное электронное устройство IED, выполнено с возможностью управления, наблюдения и защиты оборудования или части электроэнергетической системы 1. На фиг. 2 линия 13 передачи/распределения смонтирована с прерывателем 11 цепи, и управляющее устройство 4 управляет прерывателем 11 цепи, который может срабатывать (размыкаться), например, если короткое замыкание обнаружено на линии 13 передачи/распределения. Прерыватель 11 цепи, таким образом, подключен в линию 13 передачи/распределения. Трансформатор 14 тока размещен так, чтобы измерять ток через прерыватель 11 цепи, а трансформаторы 15 напряжения типично размещены на обеих сторонах прерывателя 11 цепи, как упомянуто в разделе "Предшествующий уровень техники".
Измерения от трансформаторов 14 тока и трансформаторов 15 напряжения вводятся в управляющее устройство 4 и, в частности, в его трансформаторный модуль 5. Трансформаторный модуль 5 принимает эти аналоговые значения и выводит их в аналого-цифровой преобразователь 6, посредством множества каналов CH1, CH2, …, CHn.
Аналого-цифровой преобразователь 6 квантует изменяющиеся по времени сигналы, принятые от трансформаторного модуля 5, преобразуя их в последовательность цифровых выборок. Результат квантуется и по времени, и по значению известным образом.
Аналого-цифровой преобразователь 6, таким образом, выводит цифровые значения в процессор 7, например, центральный процессор (CPU) и/или цифровой сигнальный процессор (DSP). В последующем CPU 7 используется для обозначения процессора управляющего устройства 4, хотя процессор 7 может содержать DSP или комбинацию и того, и другого. CPU 7 может содержать множество микропроцессоров. CPU выполняет множество вычислений и алгоритмов, таких как предоставление и получение значений выборок, среднеквадратичные (rms) значения, реальные и фиктивные вычисления фазового вектора, дискретные преобразования Фурье и т.д. CPU 7 - место, где прикладные функции выполняются в рабочей среде.
Бинарные данные состояния из электроэнергетической системы 1 передаются в CPU 7 через модуль 8 бинарного ввода. Модуль 8 бинарного ввода может, например, быть выполнен с возможностью приема бинарных входных данных, таких как размыкание/замыкание прерывателя цепи, положение выключателя (замкнутое/разомкнутое), локальное/удаленное управление и т.д. Все такие данные передаются в CPU 7 для обработки и логического вычисления.
В варианте осуществления управляющее устройство 4 дополнительно содержит модуль 9 вывода, который выполнен с возможностью передачи операционных команд оборудованию электроэнергетической системы 1, например, прерывателю 11 цепи. Операционные команды могут, например, содержать команду замыкания или команду размыкания.
В другом варианте осуществления модуль 9' вывода не является частью управляющего устройства 4. Модуль 9' вывода тогда способен обмениваться данными с CPU через средство обмена данными, такое как полевая/процессная шина 10'. Полевая/процессная шина 10' в таком случае является внешней по отношению к управляющему устройству 4. Для варианта осуществления, в котором управляющее устройство 4 содержит модуль 9 вывода, средство обмена данными, такое как соединительная плата 10 обмена данными, может быть внутренним по отношению к управляющему устройству 4.
Таким образом, отметим, что изобретение охватывает как модули локального ввода/вывода (LIO), означая, что управляющее устройство 4 содержит такие модули ввода/вывода, так и модули удаленного ввода/вывода (RIO), означая, что такие модули ввода/вывода расположены где-то еще и независимо от управляющего устройства 4. В случае RIO-модулей, RIO-модули обмениваются данными с управляющим устройством 4 через внешнюю полевую/процессную шину 10'. Изобретение дополнительно охватывает комбинации LIO и RIO-конфигураций. Т.е., управляющее устройство 4 может содержать один или более LIO, а также обмениваться данными с одним или более RIO.
В соответствии с вышесказанным, модуль 8 ввода не должен быть частью управляющего устройства 4, а может быть отдельным модулем, расположенным где-либо еще. Дополнительные внешние модули 5' ввода могут также передавать данные управляющему устройству 4 через полевую/процессную шину 10'.
В случае RIO-конфигурации аналоговая обработка может быть сделана удаленным блоком, а данные могут быть отправлены через полевую/процессную шину 10'. Дополнительно, модуль 5 трансформатора и аналого-цифровой преобразователь 6 могут быть опущены для управляющего устройства 4, приспосабливаемого к такой RIO-конфигурации.
В случае RIO-конфигурации синхронизация между CPU 7 и модулями 9' вывода содержит механизм, эквивалентный случаю, когда реализована LIO-конфигурация. Т.е., CPU 7 будет синхронизировать также удаленные IO-модули 5', 8', 9'.
Обмен данными между различными частями управляющего устройства 4 выполняется посредством соединительной платы 10 обмена данными или внешней полевой/процессной шины 10'. Соединительная плата 10 обмена данными может, например, содержать CAN-шину (локальную сеть контроллеров), приспособленную к протоколам на основе сообщений CAN-стандарта.
Время передачи сообщения от CPU 7 к модулю 9, 9' вывода через соединительную плату обмена данными 10 или внешнюю полевую/процессную шину 10' трудно спрогнозировать. Такая задержка принята во внимание в настоящем изобретении, и проблемы, связанные с такой задержкой обмена данными, преодолены. В частности, такая задержка может вызывать переключение на основе точки на кривой в менее оптимальной точке, что негативно сказывается, например, на электроэнергетической системе 1, а также на времени обслуживания прерывателя 11 цепи.
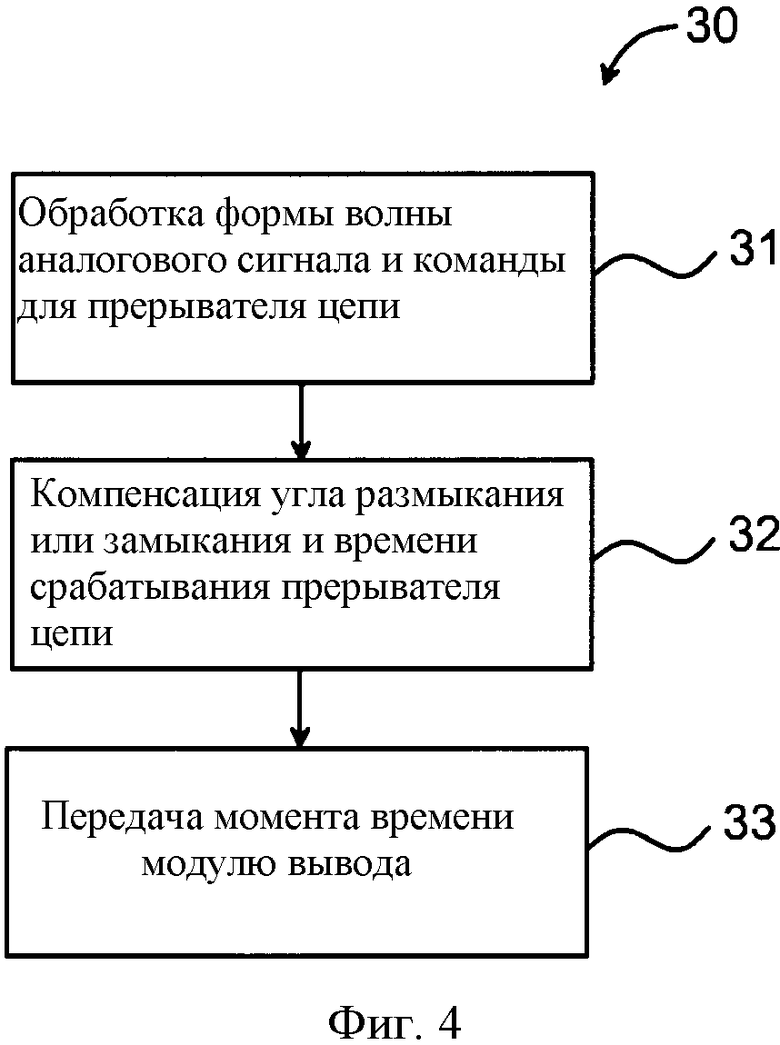
CPU 7 и модули 9, 9' вывода синхронизированы. CPU 7 может действовать как главный синхронизатор и рассылать сообщения синхронизации регулярно, например, каждую секунду, в специальном формате. Внешняя синхронизация с часами реального времени типа GPS (глобальная система позиционирования) часов не нужна, поскольку форма сигнала энергетической системы сравнивается со временем, которое используется в соответствии с изобретением. Функциональность фактического управляемого переключения (переключения на основе точки на кривой) выполняется в CPU 7. Вкратце, переключение на основе точки на кривой нацелено на срабатывание прерывателя 11 цепи в конкретной точке на кривой, например, пересечении нулевого тока, для того, чтобы избегать или, по меньшей мере, минимизировать возникновение электрической дуги и вредных переходных состояний. Со ссылкой на фиг. 3 иллюстрируется форма 20 волны тока для одной фазы. Желаемое переключение прерывателя 11 цепи в данной точке на форме волны, например, в пересечении нулевого тока (одно из которых указано под ссылочным номером 21), требует, чтобы время срабатывания прерывателя цепи было принято во внимание. Ввиду этого, CPU 7 компенсирует время срабатывания прерывателя цепи в алгоритмах, чтобы позволять своевременно передавать сигнал операционной команды (размыкания/замыкания) прерывателю 11 цепи. Если операционная команда отправлена в точке 22 на форме 20 волны тока, пересечение 21 нулевого тока может быть удовлетворено. Это известно, и алгоритмы для компенсации такой задержки известны. Однако, как объяснено ранее, также существуют другие задержки, приводящие в результате к тому, что команды переключения все еще отправляются слишком поздно, и переключение, например, совершается в точке 23.
Отметим, что точка на кривой может быть задана подходящим образом. Желательно, чтобы это была точка пересечения нулевого тока, но могут быть также другие точки, например, точка на кривой, идущей вниз перед пересечением нулевого тока, является идеальной для некоторых применений.
В соответствии с изобретением, эффекты различных задержек устраняются посредством необходимости CPU 7 вычислять момент времени, содержащий абсолютное время во временной области, внутренней по отношению к управляющему устройству 4, которая будет описана более подробно далее. Со ссылкой на фиг. 4, иллюстрируются этапы способа, выполняемого в управляющем устройстве 4 и, в частности, посредством CPU 7.
Способ 30 содержит первый этап обработки 31 формы волны аналогового сигнала и команды для размыкания или замыкания прерывателя цепи. Форма волны аналогового сигнала преобразуется из частотной области во внутреннюю временную область, которая известна CPU 7 и модулю 9 вывода. Обработка команды для размыкания или замыкания прерывателя цепи содержит прием входных данных, указывающих необходимость действия прерывателя цепи.
Способ 30 содержит второй этап компенсации 32 для настраиваемого угла размыкания или замыкания формы волны и для времени срабатывания прерывателя цепи. Поскольку, например, прерыватели цепи или контакторы имеют задержки срабатывания для размыкания/замыкания контактов, эти времена срабатывания компенсируются. Времена срабатывания прерывателей цепи типично известны и предоставлены их производителями.
Способ 30 содержит третий этап передачи, на основе обработки первого этапа и компенсации второго этапа, момента времени от центрального процессора 7 модулю 9, 9' вывода, причем в этот момент времени операционная команда должна быть передана модулем 9, 9' вывода прерывателю 11 цепи. Момент времени может быть предоставлен с помощью системы Epoch или некоторой другой системы для описания моментов во времени.
Когда все вышесказанное вычислено, CPU 7 отправляет точное вычисленное время модулю 9, 9' вывода относительно того, когда отправлять операционную команду, т.е., замыкание или размыкание, в зависимости от конкретного случая. Внутреннее время управляющего устройства 4 или время передачи сообщения от CPU 7 к модулю 9, 9' вывода тогда не являются критическими. Однако, время передачи должно быть учтено, например оценено, так что точное время, которое вычислено посредством CPU 7 для операционной команды, которая идет раньше по времени, не достигает модуля 9, 9' вывода слишком поздно.
Модуль 9, 9' вывода снабжен собственным средством 12 обработки для выполнения на основе момента времени, принятого CPU 7, команды замыкания или размыкания прерывателю 11 цепи. Средство 12 обработки может, например, содержать микроконтроллер или программируемую пользователем вентильную матрицу (FPGA). Модуль 9, 9' вывода, таким образом, способен выполнять переключение на основе точки на кривой, которое независимо от внутреннего времени управляющего устройства 4 или времени передачи сообщения от CPU 7 к модулю 9, 9' вывода. Следовательно, замыкание или размыкание прерывателя 11 цепи зависит только от времени замыкания или размыкания, которое вычисляется и определяется посредством CPU 7.
Прикладная функция переключения на основе точки на кривой в CPU 7 связана с каналом(ами) вывода модуля 9, 9' вывода. В отличие от традиционного способа, в котором соединения каналов бинарного вывода являются логическими (булевыми) соединениями, в настоящем изобретении соединение будет временным соединением, а в частности, временем выполнения команды. Другими словами, на предшествующем уровне техники, CPU 7 выводит команду размыкания/замыкания модулю 9, 9' вывода, который действует соответствующим образом, чтобы выводить команду прерывателю цепи. В отличие от этого, в соответствии с изобретением, CPU 7 выводит момент времени дополнительному средству 12 обработки модуля 9, 9' вывода. Модуль 9, 9' вывода, таким образом, способен выполнять команду в момент времени, предоставленный ему. Действия задержек обмена данными для передачи через соединительную плату обмена данными 10 или внешнюю полевую/процессную шину 10', таким образом, эффективно устраняются.
Использование: в области электротехники. Технический результат - повышение точности и надежности. Управляющее устройство (4) содержит центральный процессор (7) и выполнено с возможностью обмена данными с модулем (9, 9') вывода, выполненным с возможностью вывода операционных команд к прерывателю (11) цепи. Модуль (9, 9') вывода содержит средство (12) обработки, выполненное с возможностью исполнения операционной команды в момент времени, полученный от центрального процессора (7). Изобретение также охватывает связанные способы. 2 н. и 11 з.п. ф-лы, 4 ил.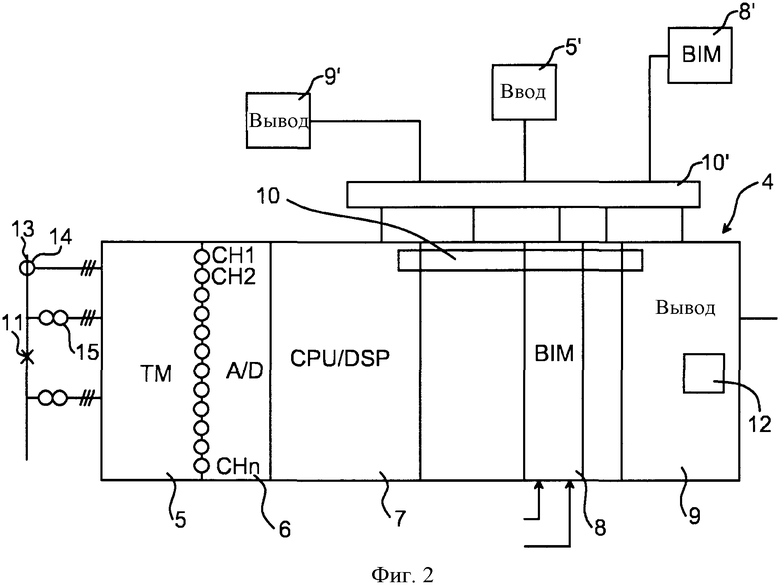
1. Управляющее устройство (4) для управления прерывателем (11) цепи, причем управляющее устройство (4) содержит центральный процессор (7) и выполнено с возможностью обмена данными с модулем (9, 9′) вывода, причем модуль (9, 9′) вывода выполнен с возможностью вывода операционных команд к прерывателю (11) цепи, отличающееся тем, что модуль (9, 9′) вывода содержит средство (12) обработки, выполненное с возможностью исполнения операционной команды в момент времени, полученный от центрального процессора (7).
2. Управляющее устройство (4) по п. 1, при этом момент времени содержит абсолютное время во временной области, внутренней по отношению к управляющему устройству (4).
3. Управляющее устройство (4) по п. 1 или 2, при этом момент времени не зависит от времени передачи сообщения через соединительную плату обмена данными (10) или внешнюю полевую/процессную шину (10′) от центрального процессора (7) к модулю (9, 9′) вывода.
4. Управляющее устройство (4) по п. 1, в котором центральный процессор (7) выполнен с возможностью: обработки формы входного аналогового сигнала и команд для размыкания или замыкания прерывателя цепи; компенсации устанавливаемого угла размыкания или замыкания для переключения прерывателя цепи в заданной точке на кривой, имеющей вид волны; и передачи, на основе обработки и компенсации, момента времени, от центрального процессора (7) к модулю (9, 9′) вывода, в который операционная команда должна быть передана модулем (9, 9′) вывода прерывателю (11) цепи.
5. Управляющее устройство (4) по п. 1, дополнительно выполненное с возможностью обмена данными с модулем (5, 5′, 8) ввода, причем модуль (5, 5′, 8) ввода выполнен с возможностью приема измерений от оборудования (14, 15), такого как трансформатор (14) тока и/или трансформатор (15) напряжения, в электроэнергетической системе (1), в которой размещен прерыватель (11) цепи.
6. Управляющее устройство (4) по п. 4, в котором модуль (5, 5′, 8) ввода является аналоговым модулем ввода, и управляющее устройство (4) дополнительно содержит аналого-цифровой преобразователь, выполненный с возможностью приема аналоговых данных от модуля (5, 5′) ввода, преобразования аналоговых данных в цифровые данные, пропорциональные аналоговым данным, и вывода цифровых данных в центральный процессор (7).
7. Управляющее устройство (4) по п. 1, дополнительно выполненное с возможностью обмена данными с модулем (8, 8′) бинарного ввода, причем модуль (8, 8′) бинарного ввода выполнен с возможностью приема бинарных данных состояния от прерывателя (11) цепи.
8. Управляющее устройство (4) по п. 1, в котором центральный процессор (7) и модуль (9, 9′) вывода синхронизированы.
9. Управляющее устройство (4) по п. 1, при этом операционная команда содержит команду размыкания или команду замыкания прерывателя (11) цепи, управляемого посредством управляющего устройства (4).
10. Управляющее устройство (4) по п. 1, при этом средство (12) обработки модуля (9, 9') вывода содержит микроконтроллер или программируемую пользователем вентильную матрицу.
11. Управляющее устройство (4) по п. 1, в котором центральный процессор (7) и модуль (9, 9′) вывода обмениваются данными через соединительную плату (10) обмена данными или внешнюю полевую/процессную шину (10′).
12. Способ (30) в управляющем устройстве (4) для управления прерывателем (11) цепи, причем управляющее устройство (4) содержит центральный процессор (7) и выполнено с возможностью обмена данными с модулем (9, 9′) вывода, причем модуль (9, 9′) вывода выполнен с возможностью вывода операционных команд к прерывателю (11) цепи, причем способ содержит этапы, на которых:
- обрабатывают (31) форму входного аналогового сигнала и команды для размыкания или замыкания прерывателя цепи,
- компенсируют (32) устанавливаемый угол размыкания или замыкания для переключения прерывателя цепи в заданной точке на кривой, имеющей вид волны,
- передают (33), на основе обработки и компенсации, момент времени от центрального процессора (7) к модулю (9, 9′) вывода, в который операционная команда должна быть передана модулем (9, 9′) вывода прерывателю (11) цепи.
13. Способ (30) по п. 12, в котором этап обработки формы волны аналогового сигнала содержит этап, на котором преобразуют форму волны аналогового сигнала из частотной области во внутреннюю временную область, которая известна CPU (7) и модулю (9, 9′) вывода.
| EP 0957555A2, 17.11.1999 | |||
| УСТРОЙСТВО И СПОСОБ УПРАВЛЕНИЯ АВАРИЙНЫМ ОТКЛЮЧЕНИЕМ ДЛЯ АВТОМАТИЧЕСКОГО ВЫКЛЮЧАТЕЛЯ | 2007 |
|
RU2360347C1 |
| СПОСОБ УПРАВЛЕНИЯ ФИДЕРНЫМ ВЫКЛЮЧАТЕЛЕМ ТЯГОВОЙ ПОДСТАНЦИИ ПЕРЕМЕННОГО ТОКА 27,5 кВ И 2 × 27,5 кВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2006 |
|
RU2317622C1 |
| US 2008019063A1, 24.01.2008 | |||

