Уровень техники
Нижеследующее, в целом, относится к определению кривой перемещения контактов прерывателя выключателя высоковольтной цепи и, в частности, к определению одной или нескольких кривых перемещения при наличии или отсутствии реальных измерений длины перемещения контакта, выполняемых во время операции размыкания и/или замыкания с помощью датчиков перемещения контактов.
Техническое обслуживание в зависимости от состояния выключателей высоковольтных цепей выполняют посредством включения в состав выключателей высоковольтных цепей микропроцессора, управляемого в режиме реального времени устройствами и датчиками мониторинга текущего состояния. В общем, датчики/устройства устроены так, чтобы измерять информацию, используемую для вычисления критических параметров, отображающих степень исправности выключателей. Примером такого датчика является датчик перемещения контакта. Такой датчик способен отслеживать положение контактов выключателя, когда они перемещаются от разомкнутого положения к замкнутому, и, наоборот, с разрешением около 0,1-1,0 мм (миллиметров) и периодом выборки обычно 0,1-0,3 мс (миллисекунды).
Графическое отображение положения контакта с течением времени называют кривой перемещения. Кривую перемещения записывают в течение периода времени экспозиции, например, 150 мс или около того. Типы и последовательности операций, захватываемых за этот период времени, следующие: замыкание (З), размыкание (Р) и замыкание/размыкание (З-Р). Операцию размыкания называют операцией "выключения". Более сложные последовательности, такие как размыкание/замыкание/размыкание (Р-З-Р), могут быть захвачены при более длительных периодах времени экспозиции либо в течение двух или нескольких перемежающихся периодов времени.
Как только кривая перемещения записана, из нее могут быть получены важные параметры. Эти параметры включают в себя, но не ограничиваясь, следующее: перебег, равный расстоянию, временно пройденному сверх запланированного конечного положения; отскок, равный расстоянию, временно пройденному от запланированного конечного положения в результате перебега; полный ход, равный расстоянию, пройденному между самой дальней от конечного положения точкой и самой дальней от точкой от начального положения; время реакции, равное времени от начала операции до момента, когда контакты начнут перемещаться; скорость контакта, равная наклону прямой, соединяющей две точки кривой перемещения, заданной производителем, и время срабатывания механизма, равное времени от начала операции до момента, когда будет достигнуто такое положение контакта, при котором контакты соприкоснутся или будут разделены.
Компонент автоматического выключателя, предназначенный для разрыва токов различных амплитуд, называют прерывателем. В период срока службы автоматического выключателя износу подвергается его прерыватель. Износ накапливается во время периодов дугового разряда, т.е. периодов во время операции размыкания или замыкания, когда контакты физически отделены друг от друга зазором, а зазор перекрыт электрической дугой. Дуга соединяет специализированный набор контактов, предназначенных для этой цели, и которые называют дугогасительными контактами. Существуют различные способы вычисления или, по меньшей мере, аппроксимации износа прерывателя путем измерения тока, проходящего через выключатель. Эти способы иногда называют алгоритмами определения износа прерывателя.
В дополнение к току, проходящему через выключатель, алгоритму определения износа прерывателя необходимы данные о моменте времени, когда во время операции размыкания дугогасительные контакты разъединяются или во время операции замыкания - соприкасаются. Эти данные могут быть получены путем мониторинга вспомогательного переключателя, который механически соединен с контактами выключателя, и замыкается и размыкается одновременно с разъединением или соприкосновением дугогасительных контактов. Примеры таких вспомогательных переключателей включают в себя, но не ограничиваясь, переключатели А и В. Переключатель А замыкается во время операции замыкания после того, как контакты прошли около 70% по направлению к конечному положению, а переключатель В размыкается во время операции замыкания после того, как контакты прошли около 30% по направлению к конечному положению. Точные значения зависят от выключателя и используемой модели. Переключатель А размыкается, а переключатель В замыкается во время операции размыкания. Обычно вспомогательные переключатели используют для управляющих схем и дистанционной индикации контактов выключателя. Так как последняя функция является основной для функционирования выключателей высоковольтных цепей, то выключатели оборудуют вспомогательными переключателями в качестве стандартных компонентов.
Помимо вычисления износа прерывателя, обычные устройства мониторинга текущего состояния в режиме реального времени используют вспомогательные переключатели, чтобы отслеживать интервалы времени работы выключателя. Тем не менее, вместо того, чтобы получать параметры, такие как время реакции или скорость контакта, они просто отслеживают, разомкнуты или замкнуты ли вспомогательные переключатели в определенном промежутке времени. Как вариант, если используется датчик перемещения, то время, когда дугогасительные контакты соединяются или разъединяются, может быть получено путем поиска соответствующей точки на кривой перемещения. Использование датчика перемещения также делает возможным использование более сложных алгоритмов определения износа прерывателя. Можно определить не только время, когда дугогасительные контакты соединяются или разъединяются, но также время, когда другие части прерывателя, такие как сопла, подвергаются воздействию дуги, так как это является функцией положения контактов.
Измерение перемещения выполняют не только посредством устройств мониторинга текущего состояния в режиме реального времени. Его также используют как часть автономных измерений во время заводских испытаний, при сдаче в эксплуатацию и при ежегодном (или другой периодичности) обслуживании. Так как его используют повсеместно в отрасли электроэнергетики, то, в дополнение к важным параметрам, которые могут быть получены из кривой перемещения, графическое представление в виде кривой перемещения само по себе представляет ценность для пользователя.
К сожалению, использование датчиков перемещения для мониторинга текущего состояния в режиме реального времени ставит различные технические и экономические задачи. В то время как коммерчески доступны датчики линейных и ротационных перемещений, успешная их установка на выключателе высоковольтных сетей является нетривиальной задачей. То есть, в общем случае, не могут быть использованы места установки, используемые для автономных датчиков перемещения, так как эти места не защищены от влияния погодных условий. Места, которые защищены от влияния погодных условий, часто не содержат доступных частей механизма, которые подходили бы для захвата либо прямолинейного, либо вращательного движения, в частности движения, которое пропорционально или, по меньшей мере, однозначно связано с перемещением контактов, которое необходимо измерить.
Как только определено подходящее место для установки датчика перемещения реального времени и разработано необходимое оборудование для монтажа, устройство датчика перемещения должно быть подвергнуто тестированию на стойкость, по меньшей мере, для 2000 операций (3 и Р), чтобы гарантировать, что установка и/или датчик не придут в негодность в течение срока службы. Испытание на стойкость установки датчика перемещения экономично только во время фазы прототипирования новой модели автоматического выключателя, так как в любом случае необходимо проводить испытание. Кроме того, это более затратно для текущих производственных моделей, потому что выключатель должен быть изготовлен специально для испытания датчика перемещений и, очевидно, не может быть затем продан. Более того, для снятых с производства моделей единственные образцы - это выключатели, которые еще работают, и проведение испытаний их на прочность не является целесообразным. Поэтому разработка системы мониторинга в реальном времени, которая использует датчики перемещения, либо нецелесообразна экономически, либо имеет высокие риски ответственности за качество выпускаемой продукции.
Раскрытие изобретения
В соответствии с одним аспектом система включает в себя память, в которой хранится информация о расстоянии перемещения заданного контакта автоматического выключателя высоковольтной цепи, и процессор, который определяет кривую перемещения, по меньшей мере, одной из следующих операций для контактов: замыкание, размыкание или сочетание замыкания и размыкания, исходя из одного или нескольких расстояний перемещения, сохраненной информации о расстоянии перемещения и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями, при этом переключатели прикреплены к контактам так, что переходят между замкнутым и разомкнутым состоянием, в то время как контакты перемещаются между замкнутым и разомкнутым положениями.
В соответствии с другим аспектом способ включает в себя следующее: посредством процессора определяют кривую перемещения, по меньшей мере, одной из следующих операций для контактов прерывателя автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, исходя из одного или нескольких заданных расстояний перемещения контактов относительно друг друга и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями во время работы выключателя, при этом переключатели прикреплены к контактам, так что переходят между замкнутым и разомкнутым состоянием, в то время как контакты перемещаются между замкнутым и разомкнутым положениями.
В соответствии с другим аспектом способ включает в себя следующее: отображают кривую перемещения, по меньшей мере, одной из следующих операций для контактов прерывателя автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, при этом кривую перемещения определяют, исходя из одного или нескольких заданных расстояний перемещения контактов относительно друг друга и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями, при этом переключатели прикреплены к контактам, так что переходят между замкнутым и разомкнутым состоянием, в то время как контакты перемещаются между замкнутым и разомкнутым положениями.
Способ включает в себя следующее: посредством процессора определяют один или несколько параметров для автоматического выключателя высоковольтной цепи, исходя из кривой перемещения, по меньшей мере, одной из следующих операций для контактов прерывателя автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, при этом кривую перемещения определяют, исходя из одного или нескольких заданных расстояний перемещения контактов относительно друг друга и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями, при этом переключатели прикреплены к контактам, так что переходят между замкнутым и разомкнутым состоянием, в то время как контакты перемещаются между замкнутым и разомкнутым положениями.
После прочтения и понимания прилагаемых чертежей и описаний специалисты в области техники поймут еще другие аспекты настоящей заявки.
Краткое описание чертежей
Настоящая заявка проиллюстрирована на примере, но не ограничиваясь, приведенном на фигурах на прилагаемых чертежах, на которых одни и те же ссылочные позиции обозначают одинаковые элементы и на которых:
на фиг.1 показан пример электросети;
на фиг.2 показан пример автоматического выключателя высоковольтной сети с интегрированным устройством мониторинга текущего состояния в режиме реального времени;
на фиг.3 показан пример кривой перемещения для операции замыкания выключателя сети;
на фиг.4 показан пример кривой перемещения для операции размыкания выключателя сети;
на фиг.5 показан пример кривой перемещения для операции замыкания-размыкания выключателя сети; и
на фиг.6 показан пример способа оценивания кривой перемещения выключателя сети.
Осуществление изобретения
Нижеследующее в целом относится к мониторингу текущего состояния в режиме реального времени в связи с выключателем высоковольтной цепи, в котором устройство мониторинга текущего состояния в режиме реального времени определяет одну или несколько кривых перемещения (например, непрерывную и дифференцируемую, прерывистую и т.д.), исходя из предварительно измеренных или заданных и записанных расстояний перемещения контактов выключателя и считанных состояний переключателей, которые прикреплены к контактам так, чтобы размыкаться и замыкаться, или наоборот, одновременно с размыканием и замыкание контактов. В одном случае это позволяет определить различные параметры, такие как параметры, показывающие степень исправности выключателя, без использования датчика перемещения контакта и/или измерения реального расстояния перемещения контактов во время операций замыкания, размыкания и/или других операций выключателя.
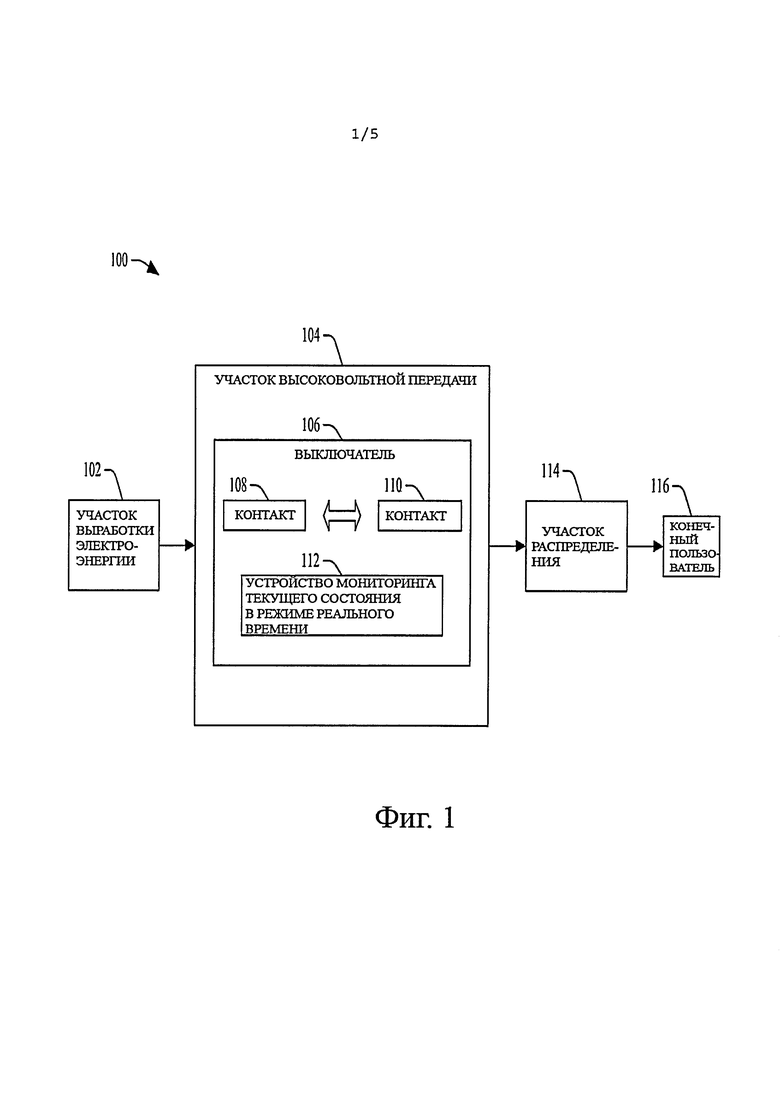
На фиг.1 показан пример электросети 100. Электросеть 100 включает в себя участок 102 выработки электроэнергии, такой как одна или несколько электростанций, которые вырабатывают электроэнергию. Электростанции могут вырабатывать электроэнергию с помощью генератора, который преобразует механическую энергию в электрическую энергию, и/или используя способы без генератора. Источник энергии, используемый для вращения генератора, может включать в себя один или несколько из следующих источников энергии, используемых электростанциями: уголь, ядерное топливо, природный газ, гидроэлектрический (вода), бензин, солнечный, ветер, геотермальный и/или другие источники энергии. Энергия, вырабатываемая одним или несколькими участками 102 выработки электроэнергии, может варьироваться от мегаватт (МВт) до гигаватт (ГВт), например от 1 МВт до 50 ГВт или выше.
Электросеть 100 дополнительно включает в себя участок 104 высоковольтной передачи, имеющий одну или несколько высоковольтных магистралей, которые передают электроэнергию от участка 102 выработки электроэнергии потребителям электроэнергии, или конечным пользователям. Перед тем как передать через участок 104 высоковольтной передачи энергию от участка 102 выработки электроэнергии повышают посредством повышающего трансформатора или другого повышающего энергию устройства. Показанный участок 104 высоковольтной передачи передает напряжение в диапазоне от 100 кВ до 230 кВ или выше. Высоковольтные магистрали могут включать в себя высоковольтный провод воздушной линии и/или подземные кабели.
Участок 104 высоковольтной передачи включает в себя, по меньшей мере, один высоковольтный прерыватель или выключатель 106, у которого имеются контакты 108 и 110. Электрические контакты 108 и 110 предназначены для осуществления электрического контакта, чтобы завершить линию электрического тока для передачи высокого напряжения и чтобы выборочно разрывать электрический контакт для прерывания линии электрического тока. Для последнего электрические контакты 108 и 110 могут быть разъединены в ответ на условия отказа, такие как перегрузка, короткое замыкание или другое обнаруженное условие отказа. Подходящие выключатели включают в себя однополюсный выключатель, который прерывает только один полюс, и групповой или многополюсный выключатель, который одновременно прерывает множество полюсов.
Высоковольтный выключатель 106 дополнительно включает в себя устройство 112 мониторинга текущего состояния в режиме реального времени (которое в этом примере встроено в выключатель), которое обеспечивает проведение мониторинга состояния исправности или другого состояния выключателя 106. Как более подробно описано ниже, в одном примере устройство 112 мониторинга текущего состояния в режиме реального времени определяет кривую перемещения для контактов 108 и 110, не полагаясь на реальные измерения длины перемещения от датчиков перемещения контактов во время операций выключателя. (Конечно, в выключателях, которые включают в себя датчики перемещения контактов, устройство 112 мониторинга текущего состояния в режиме реального времени может дополнительно или в качестве альтернативы использовать реальные измерения длины перемещения, чтобы вычислить кривую перемещения.) В одном неограничивающем варианте осуществления определенная кривая перемещения является непрерывной и дифференцируемой или прерывной и может быть обработана как кривая перемещения, составленная из реальных измерений перемещения, чтобы определить различные параметры, такие как время реакции, скорость контакта, время срабатывания механизма, износ прерывателя и т.д. Более того, устройство 112 мониторинга текущего состояния в режиме реального времени может сравнивать параметры с заданными и предварительно сохраненными пороговыми значениями и/или диапазонами и генерировать и/или запускать один или несколько сигналов тревоги, если параметры не удовлетворяют соответствующим пороговым значениям и/или диапазонам.
Электросеть 100 дополнительно включает в себя участок 114 распределения, имеющий одну или несколько сетей распределения, которые обеспечивают доставку электроэнергии одному или нескольким потребителям или конечным пользователям 116. Показанный участок 114 распределения передает электроэнергию от участка 104 передачи конечному пользователю 116. Понижающий трансформатор на распределительной подстанции используют, чтобы понизить высокое напряжение до среднего напряжения, например, напряжения менее 50 кВ, которое затем передают по распределительным линиям электропередачи через столбовые трансформаторы, которые понижают напряжение до низкого напряжения, например до напряжения менее 1 кВ, и доставляют низкое напряжение на распределительную электропроводку и/или электросчетчики конечного пользователя 116.
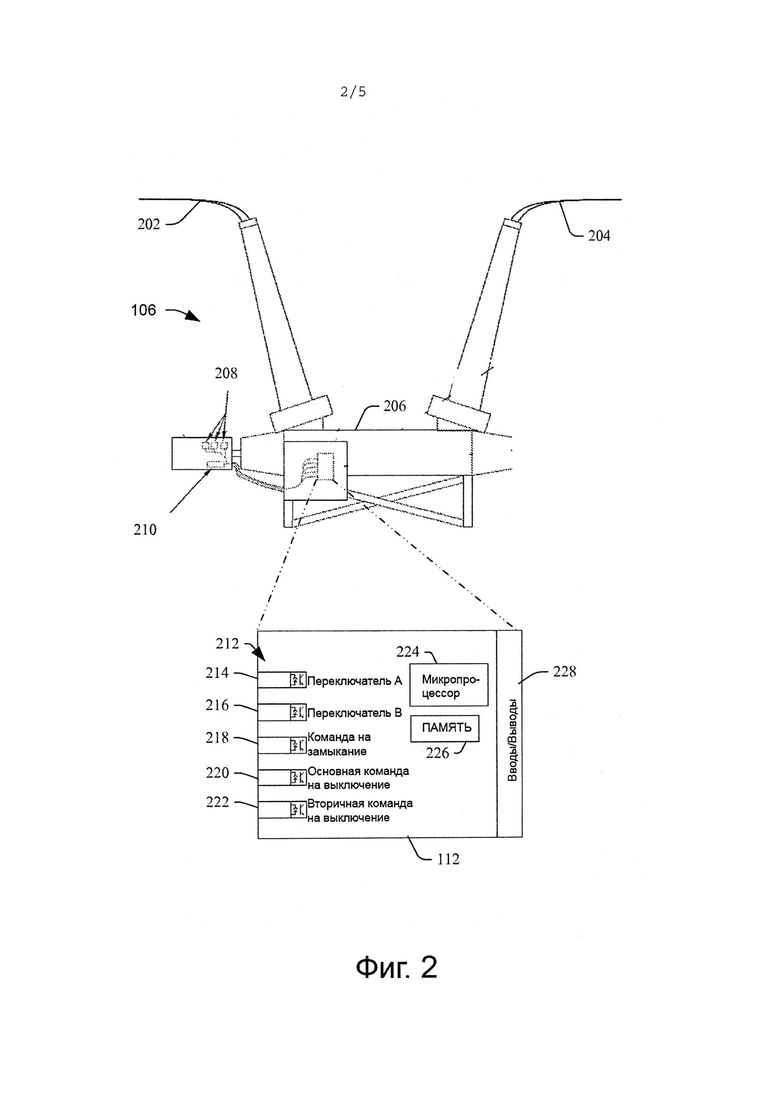
На фиг.2 показан пример выключателя 106. Линии 202 и 204 электропередачи передают электроэнергию на выключатель 106 и от выключателя 106. Одна из линий 202 или 204 передает электроэнергию на один из контактов 108 или 110 (в этом примере оба заключены в корпусе 206), а другая линия 202 или 204 передает электроэнергию от другого контакта 108 или 110. Контрольные катушки 208 размыкают и замыкают контакты 108 и 110.
Вспомогательные переключатели 210, как, например, один или несколько переключателей А и В, механически соединены с контактами 108 и 110 выключателя и размыкаются и замыкаются вместе с контактами 108 и 110. Различная информация о контактах 108 и 110 и переключателях 210, такая как расстояние, пройденное контактами 108 и 110 от полностью разомкнутого состояния до полностью замкнутого, от полностью замкнутого до того, как разомкнется переключатель А, от полностью замкнутого до того, как замкнется переключатель В, от полностью разомкнутого до того, как замкнется переключатель А, и от полностью разомкнутого до того, как разомкнется переключатель В, может быть определена, например, исходя из конструкции выключателя и/или посредством фактического измерения и записана.
Показанное устройство 112 мониторинга текущего состояния в режиме реального времени включает в себя один или несколько бинарных индикаторов 212. Для пояснения и ясности показанное устройство 112 мониторинга текущего состояния в режиме реального времени включает в себя пять (5) бинарных индикаторов 212, включая индикатор 214 состояния переключателя А, индикатор 216 состояния переключателя В, индикатор 218 состояния команды на замыкание, индикатор 220 состояния основной команды на выключение и индикатор 222 вторичной команды на выключение. Каждый из бинарных индикаторов 212 обеспечивает индикацию состояния (например, разомкнутого или замкнутого, наличия или отсутствия) соответствующего компонента или команды.
В других вариантах осуществления один или несколько бинарных индикаторов 212 могут отсутствовать. Например, в одном альтернативном варианте осуществления отсутствует индикатор 222 состояния вторичной команды на выключение. В другом варианте осуществления дополнительно или как вариант отсутствует индикатор 220 состояния основной команды на выключение. В этом варианте осуществления индикатор 218 состояния команды замыкания может включать в себя индикатор состояния команды замыкания и выключения. Еще в одном варианте осуществления устройство 112 мониторинга текущего состояния в режиме реального времени включает в себя более пяти (5) бинарных индикаторов 212. Дополнительные индикаторы могут быть использованы с вышеприведенными входами и/или другими входами.
Устройство 112 мониторинга текущего состояния в режиме реального времени дополнительно включает в себя микропроцессор 224. Показанный микропроцессор 224 опрашивает бинарные индикаторы 212, определяет указанные состояния (вкл/выкл) и управляет устройством 112 мониторинга текущего состояния в режиме реального времени и/или выполняет различные функции, исходя из состояний. Микропроцессор 224 сконфигурирован так, чтобы опрашивать состояния за период времени, достаточный, чтобы покрыть, по меньшей мере, временной интервал выполнения операции замыкание-размыкание (З-Р), и с достаточным разрешением между отсчетами. Подходящие операции включают в себя замыкание, размыкание, замыкание-размыкание, замыкание-размыкание-замыкание и/или другие сочетания операций замыкания и размыкания.
Устройство 112 мониторинга текущего состояния в режиме реального времени дополнительно включает в себя память 226, которая может быть использована для хранения различной информации, такой как информация о расстояниях перемещения контактов 108 и 110, включая перемещение от полностью разомкнутого до полностью замкнутого и перемещение от полностью разомкнутого или замкнутого до момента, когда переключатели А и В не сменят состояние (т.е. переход от разомкнутого до замкнутого, и наоборот), информация о состояниях (вкл/выкл) переключателей 210, информация о состоянии команд и/или другая информация, такая как определенная кривая перемещения, параметры, полученные из определенной кривой перемещения, данные, которые помогают получить параметры, и/или другая информация.
Устройство 112 мониторинга текущего состояния в режиме реального времени дополнительно включает в себя ввод/вывод 228, который может быть использован для передачи информации на и от устройства 112 мониторинга текущего состояния в режиме реального времени. Например, ввод/вывод 228 может быть использован для передачи информации, используемой для определения кривой перемещения, на другое устройство, которое определяет кривую перемещения, исходя из переданной информации. В другом примере ввод/вывод 228 может быть использован для передачи определенной кривой перемещения. В другом примере кривая перемещения может быть отображена на мониторе, напечатана и/или представлена другим способом, проанализирована устройством 112 мониторинга текущего состояния в режиме реального времени и/или вычислительным устройством, расположенным на расстоянии от выключателя 106, для определения различных параметров, касающихся выключателя и т.д. В другом примере ввод/вывод 228 может быть использован для получения кривой перемещения, параметров, полученных из нее, и/или другой информации от вычислительного устройства, расположенного на расстоянии от выключателя 106.
Как кратко обсуждалось выше, устройство 112 мониторинга текущего состояния в режиме реального времени определяет кривую перемещения для контактов 108 и 110. В этом варианте осуществления микропроцессор 224 определяет одну или несколько кривых перемещения, исходя из информации, находящейся в памяти 226, такой как информация о расстояниях перемещения контактов 108 и 110 и состояния переключателей 210 во время работы выключателя. В одном неограничивающем примере кривую перемещения определяют путем отображения расстояний перемещения и состояний переключателей как функции времени (например, путем нанесения на график расстояний перемещения и состояний переключателя как функции времени) и подгонки кривой к отображенным значениям. Это показано на фиг.3-5.
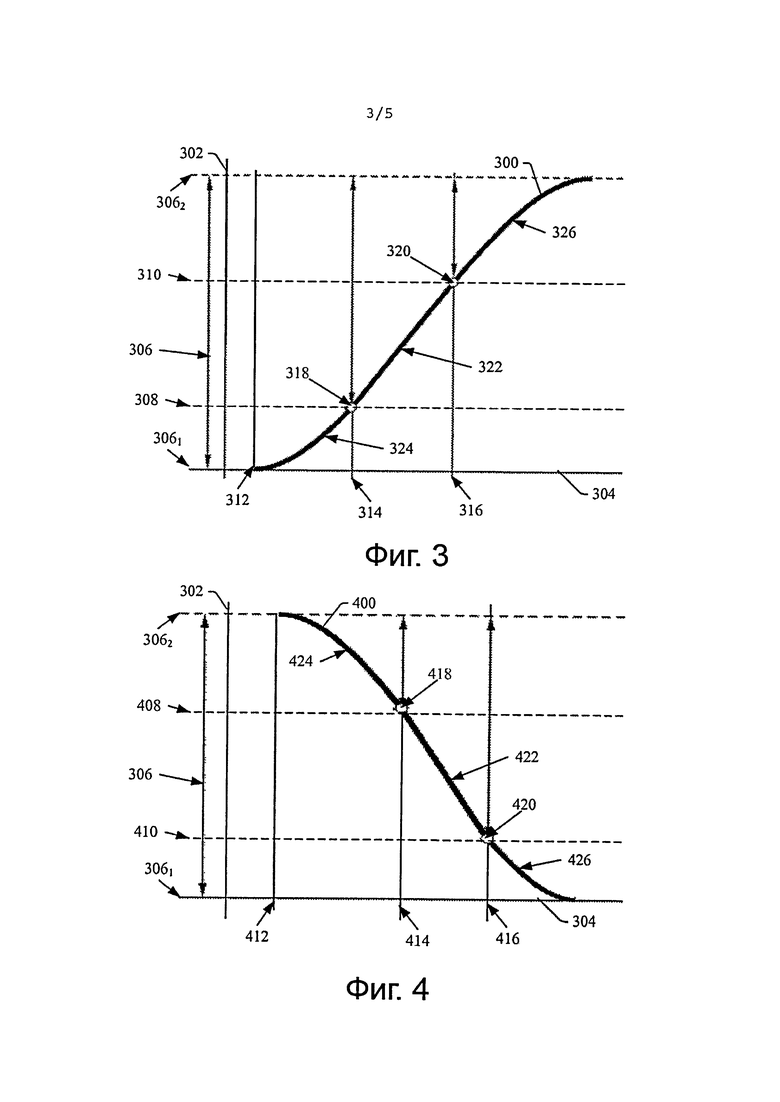
На фиг.3 показана оценка кривой 300 перемещения для операции замыкания выключателя 106, в котором контакты 108 и 110 переходят из полностью разомкнутого состояния в полностью замкнутое. На фиг.3 ось 302 у отображает расстояние перемещения контактов, а ось 304 x отображает время.
На оси 302 у показан полный диапазон 306 движения контактов (между 3061 и 3062), точка 308 в диапазоне 306, в которой размыкается переключатель В, и точка 310 в диапазоне 306, в которой замыкается переключатель А. Напомним, что это предварительно измеренные или определенные значения, которые хранятся в памяти 226.
На оси 304 x показана точка 312 во времени, когда получена команда на замыкание (как определено индикатором 218 команды на замыкание), точка 314 во времени, когда состояние переключателя В переходит из замкнутого в разомкнутое (как определено индикатором 216 переключателя В), и точка 316 во времени, когда состояние переключателя А переходит от разомкнутого в замкнутое (как определено индикатором 214 переключателя А).
На фиг.3 также показаны пересечение 318 прямых, проходящих через точки 308 и 314, и пересечение 320 прямых, переходящих через точки 310 и 316. Первый участок 322 кривой 300 перемещения определяют с помощью точек 318 и 320, соединяя эти точки. На фигуре точки соединены прямой линией. В других вариантах осуществления могут быть использованы нелинейные кривые.
Участок 324 кривой 300 от момента, когда контакты полностью разомкнуты, до момента размыкания переключателя В экстраполируют, исходя из полностью разомкнутого положения 3061 и точки 312 во времени, когда получена команда на замыкание, и точки 318 пересечения. В этом варианте осуществления участок 324 оценивают как гладкую функцию, проходящую из точки 318 пересечения и до касательной на пересечении прямых через точки 3061 и 312.
Участок 326 кривой 300 от момента, когда переключатель А замыкается, до момента, когда контакты полностью замкнуты, экстраполируют, исходя из полностью замкнутого положения 3062 и точки 320 пересечения. Аналогично, участок 326 оценивают как гладкую функцию, проходящую из точки 320 пересечения и до точки касания в полностью замкнутом положении 3062.
Отметим, что кривая 300 является непрерывной и дифференцируемой и начинается с полностью разомкнутого положения3061, проходит через точку 318 (пересечение линий через точки 308 и 314) и точку 320 (пересечение линий через точки 310 и 316) и заканчивается в полностью замкнутом положении 3062, покрывая общее расстояние 306. В другом варианте осуществления кривая 300 может быть прерывистой.
На фиг.4 показана оценка кривой 400 перемещения для операции размыкания (выключения) выключателя 106, в котором контакты 108 и 110 переходят из полностью замкнутого состояния в полностью разомкнутое. Как и на фиг.3 ось 302 у отображает расстояние перемещения контактов, а ось 304 x отображает время.
На оси 302 у показан полный диапазон 306 движения контактов, точка 408 в диапазоне 306, в которой размыкается переключатель А, и точка 410 в диапазоне 306, в которой замыкается переключатель В. На оси 304 x показана точка 412 во времени, когда получена команда на выключение, точка 414 во времени, когда состояние переключателя А переходит из замкнутого в разомкнутое, и точка 416 во времени, когда состояние переключателя В переходит от разомкнутого в замкнутое.
Также показано пересечение 418 прямых, проходящих через точки 408 и 414, и пересечение 420 прямых, проходящих через точки 410 и 416. Как и участки 322, 324 и 326 на фиг.3, участок 422 кривой 400 перемещения определяют путем соединения точек 418 и 420, участок 424 кривой 400 от момента, когда контакты полностью замкнуты, до момента, когда размыкается переключатель А, определяют, исходя из точек 3062 полностью разомкнутого положения и времени 412, когда получена команда на выключение, и точки 418 пересечения, а участок 426 кривой 400 от момента, когда замыкается переключатель В, до момента, когда контакты полностью разомкнуты, определяют, исходя из полностью разомкнутого положения 3061 и точки 420 пересечения.
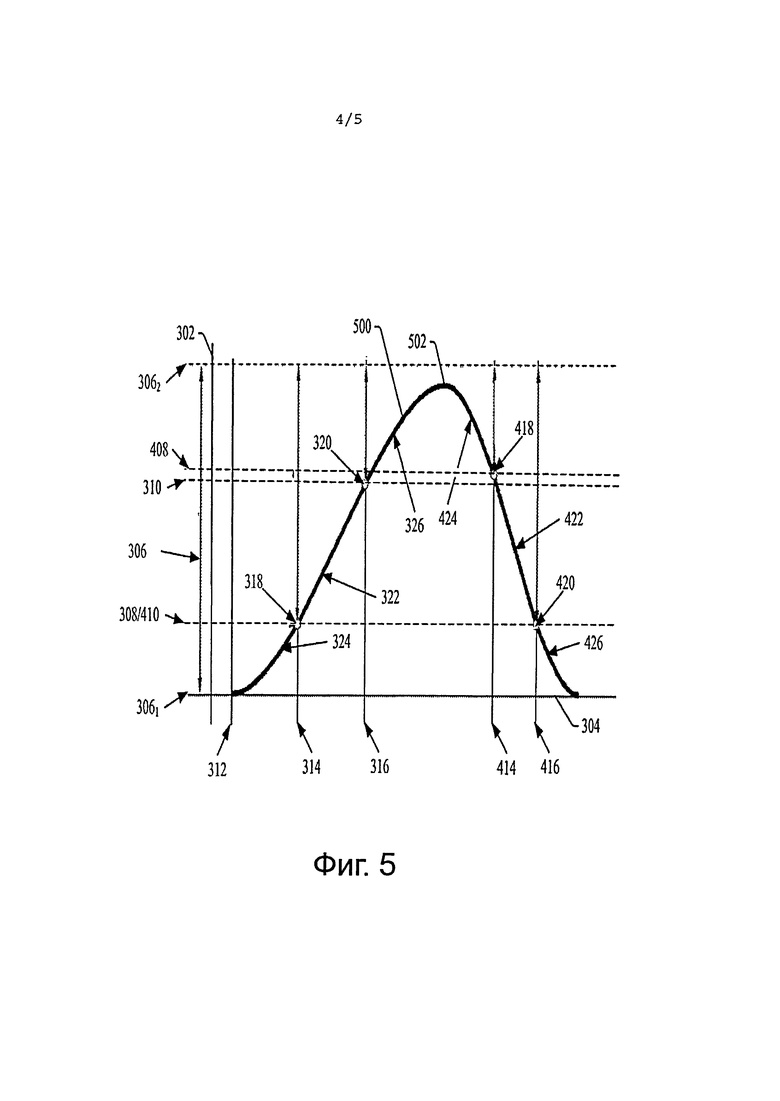
На фиг.5 показана оценка кривой 500 перемещения для операции замыкания/размыкания. Отметим, что в этом примере кривая 500 представляет собой сочетание определенной кривой 300 перемещения для операции замыкания (фиг.3) и определенной кривой 400 перемещения для операции размыкания (фиг.4), за исключением того, что точка 502 перехода, отображающая переход между замкнутым и разомкнутым состояниями, не достигает линии 3062 полностью замкнутого состояния. Аналогичные подходы могут использоваться для оценки других сочетаний операций, таких как размыкание-замыкание-размыкание, замыкание-размыкание-замыкание и/или другие сочетания. В другом варианте осуществления точка 502 лежит на линии 3062 полностью замкнутого состояния.
Полученные кривые 300, 400 и 500 перемещения могут отображать, а могут и не отображать реальное положение контакта с течением времени, но они представляют вероятное и полезное математическое решение, которое дает те же самые бинарные смены состояний в точно соответствующие моменты времени и обеспечивает конечному пользователю внешнее представление записанной кривой перемещения. Как было отмечено выше, определенные кривые позволяют определить различные параметры, такие как время реакции, скорость контактов, время срабатывания механизма, износ прерывателя и т.д. В связи с этим при возможной потере точности конечный пользователь получает от устройства мониторинга текущего состояния в режиме реального времени ту же информацию, как если бы использовался датчик перемещения и/или реальные измерения перемещения.
Более того, возможность устранить датчики перемещения может значительно снизить стоимость и риски ответственности за качество устройства мониторинга текущего состояния в режиме реального времени. Более того, для установленных изготовителем устройств мониторинга текущего состояния в режиме реального времени устранение таких компонентов может сделать цену устройств более конкурентоспособной. Для рынков модернизации, например, когда датчики перемещения являются невыгодными и/или рискованными, отсутствие таких компонентов может добавить конкурентное преимущество перед продуктами, которые не используют датчики перемещения и не вычисляют кривые перемещения, например, предлагая все или некоторое подмножество диагностических признаков, которые могут быть получены из кривой перемещения.
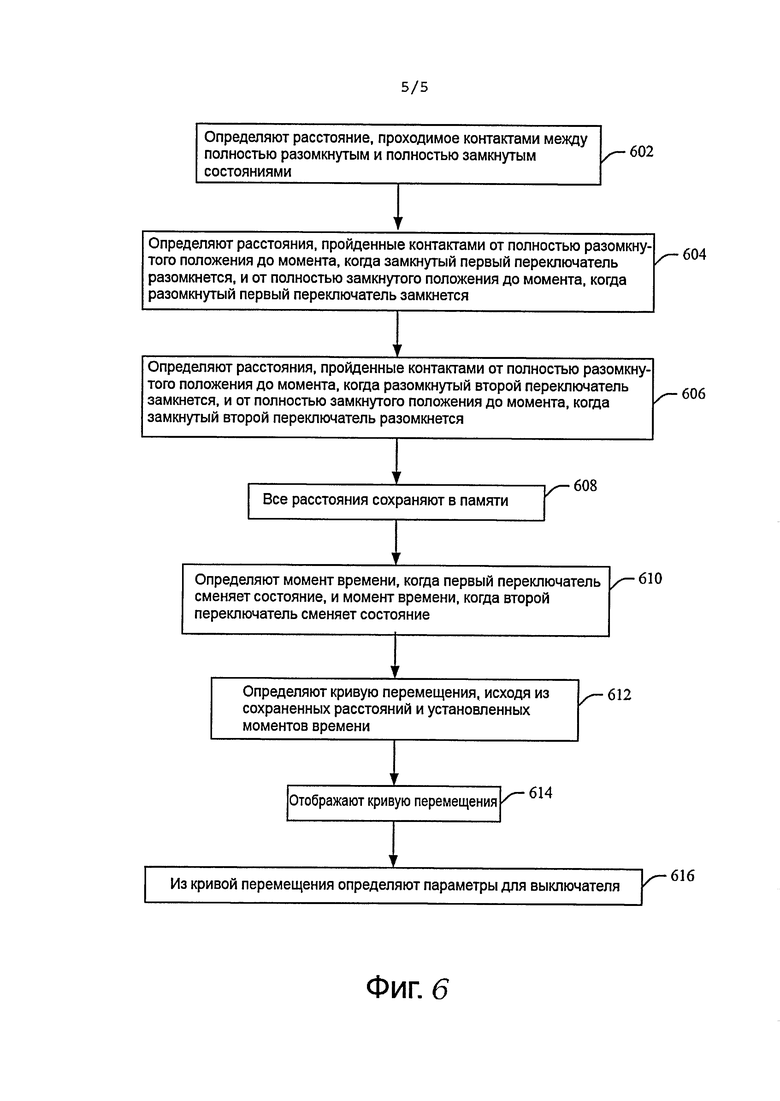
На фиг.6 показан способ определения одной или нескольких кривых перемещения для выключателя цепей высокого напряжения с помощью устройства мониторинга текущего состояния в режиме реального времени.
Надо принять во внимание, что порядок приведенных ниже действий не является ограничивающим. В связи с этим одно или несколько действий могут производиться в другом порядке. В дополнение, одно или несколько действий могут быть опущены и/или может быть добавлено одно или несколько действий
На этапе 602 определяют расстояние, проходимое контактами 108 и 110 между полностью разомкнутым и полностью замкнутым состояниями.
На этапе 604 определяют расстояния, пройденные контактами 108 и 110 от полностью разомкнутого положения до момента, когда замкнутый первый переключатель разомкнется, и от полностью замкнутого положения до момента, когда разомкнутый первый переключатель замкнется.
На этапе 606 определяют расстояния, пройденные контактами 108 и 110 от полностью разомкнутого положения до момента, когда разомкнутый второй переключатель замкнется, и от полностью замкнутого положения до момента, когда замкнутый второй переключатель разомкнется.
Как описано в этом документе, расстояния на этапах 602-606 могут быть измерены и/или определены, исходя из конструкции выключателя 106.
На этапе 608 все расстояния сохраняют в памяти.
На этапе 610 в ответ на получение и идентификацию операции выключателя (напр., замыкание и/или размыкание) определяют момент(ы) времени, когда первый переключатель сменяет состояние, и момент(ы) времени, когда второй переключатель сменяет состояние, при этом установленные моменты времени не равны.
На этапе 612 определяют кривую перемещения для операции, исходя из сохраненных расстояний и установленных моментов времени, как описано в этом документе.
На этапе 614 кривую перемещения отображают в виде, воспринимаемом человеком.
На этапе 616 кривую перемещения используют для получения различных параметров выключателя, как описано в этом документе.
Вышеприведенный способ может быть реализован посредством компьютерных команд, которые при выполнении процессором (процессорами) компьютера обуславливают осуществление описанной технологии компьютером. В таком случае команды хранят на машинном носителе информации, связанном с соответствующим компьютером или иным образом доступном компьютеру.
Надо принять во внимание, что кривая перемещения может быть оценена посредством устройства 112 мониторинга текущего состояния в режиме реального времени (например, с помощью микропроцессора 224 и/или другого компонента), другого компонента выключателя 106 и/или вычислительного устройства, расположенного на расстоянии от выключателя 106. Аналогично, параметры, полученные из кривой перемещения, могут быть получены посредством устройства 112 мониторинга текущего состояния в режиме реального времени (например, с помощью микропроцессора 224 и/или другого компонента), другого компонента выключателя 106 и/или вычислительного устройства, расположенного на расстоянии от выключателя 106. Также кривая перемещения и/или один или несколько параметров, полученных из нее, могут быть графически отображены устройством 112 мониторинга текущего состояния в режиме реального времени (например, с помощью микропроцессора 224 и/или другого компонента), другим компонентом выключателя 106 и/или вычислительным устройством, расположенным на расстоянии от выключателя 106
Конечно, после прочтения и понимания вышеизложенного описания могут появиться модификации и изменения. Предполагается, что изобретение истолковывают как включающее в себя все такие модификации и изменения в той мере, в какой они попадают под объем прилагаемой формулы изобретения или ее эквивалентов.
Изобретение относится к мониторингу текущего состояния выключателя высоковольтной цепи. Система определения кривой перемещения контактов прерывателя автоматического выключателя включает в себя память, в которой хранится заданная информация о расстояниях перемещения контактов автоматического выключателя высоковольтной цепи, и процессор, который определяет кривую перемещения, которая графически представляет положение по времени для по меньшей мере одной из следующих операций для контактов автоматического выключателя: замыкание, размыкание или сочетание замыкания и размыкания, исходя из одного или нескольких расстояний перемещения сохраненной информации о расстояниях перемещения и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями. При этом переключатели прикреплены к контактам, так что они переходят между замкнутым и разомкнутым состоянием при перемещении контактов между замкнутым и разомкнутым положениями. Технический результат - обеспечение надежного контроля работоспособности выключателей без использования датчика перемещения контактов. 4 н. и 19 з.п. ф-лы, 6 ил.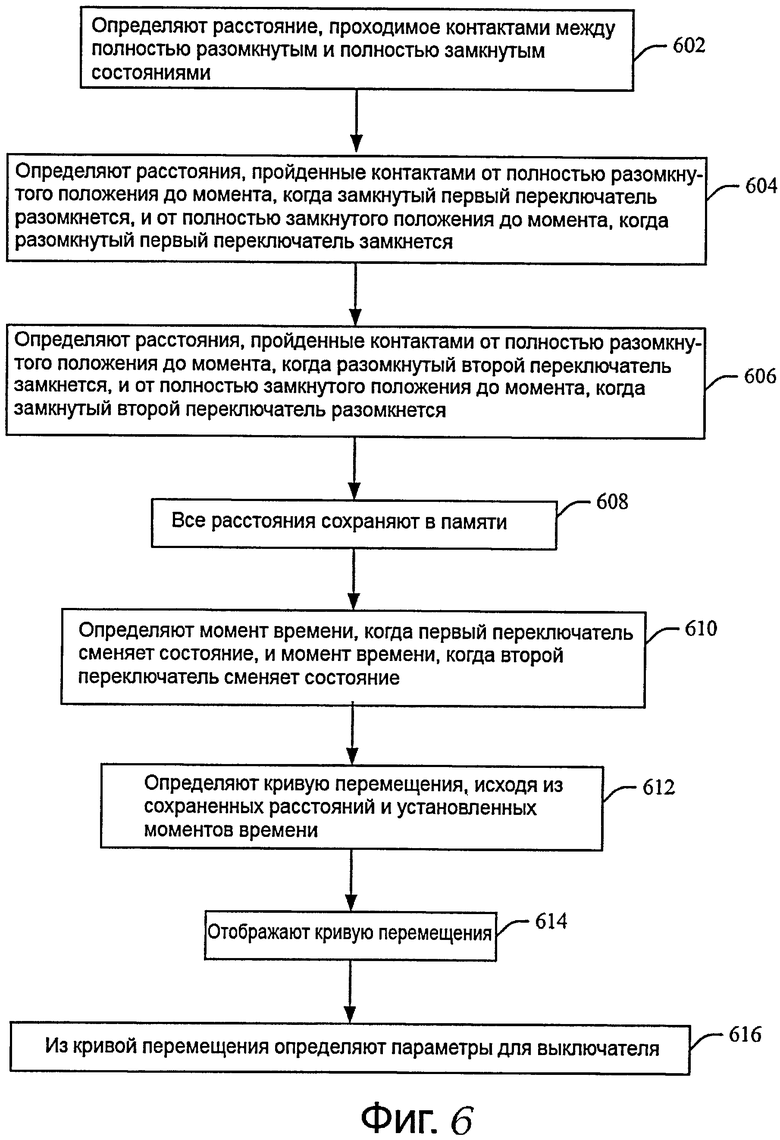
1. Система, содержащая:
память, в которой хранится заданная информация о расстояниях перемещения контактов автоматического выключателя высоковольтной цепи; и
процессор, который определяет кривую перемещения, которая графически представляет положение по времени для по меньшей мере одной из следующих операций для контактов автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, исходя из одного или нескольких заданных расстояний перемещения из сохраненной информации о расстояниях перемещения и одного или нескольких значений времени, соответствующих переходам состояний первого и второго переключателей, при этом указанные первый и второй переключатели прикреплены к контактам, так что они переходят между замкнутым и разомкнутым состоянием, когда контакты перемещаются между замкнутым и разомкнутым положениями, при этом автоматический выключатель не содержит датчика перемещения контактов, измеряющего фактическое расстояние перемещения контактов во время операций автоматического выключателя, а процессор выполнен с возможностью путем экстраполяции продолжать кривую перемещения до полностью разомкнутого положения контактов от первой точки во времени на кривой перемещения, которая хранится в памяти, где состояние переходов первого переключателя от замкнутого к разомкнутому определяется индикатором первого переключателя, до полностью замкнутого положения контактов от второй точки на кривой перемещения, которая хранится в памяти, где состояние переходов второго переключателя из разомкнутого в замкнутое определяется указателем второго переключателя.
2. Система по п. 1, содержащая:
один или несколько бинарных индикаторов, которые распознают один или несколько моментов времени.
3. Система по п. 2, в которой расстояния перемещения включают в себя одно или несколько значений из следующих: расстояние перемещения контактов между полностью замкнутым и полностью разомкнутым положениями, расстояние перемещения контактов от полностью разомкнутого положения до момента, когда замкнутый первый переключатель разомкнется, расстояние перемещения контактов от полностью разомкнутого положения до момента, когда разомкнутый второй переключатель замкнется, расстояние перемещения контактов от полностью замкнутого положения до момента, когда замкнутый первый переключатель разомкнется, и расстояние перемещения контактов от замкнутого положения до момента, когда разомкнутый первый переключатель замкнется.
4. Система по п. 3, в которой операция выключателя представляет собой операцию замыкания и значение первого момента времени из значений времени соответствует моменту, когда замкнутый первый переключатель размыкается, а значение второго момента времени из значений времени соответствует моменту, когда разомкнутый второй переключатель замыкается.
5. Система по п. 4, в которой процессор определяет: первую пару значений, включающую в себя расстояние перемещения контактов от полностью разомкнутого положения до момента, когда замкнутый первый переключатель разомкнется, и значение первого момента времени, и вторую пару значений, включающую в себя расстояние перемещения контактов от полностью разомкнутого положения до момента, когда разомкнутый второй переключатель замкнется, и значение второго момента времени, и определяет кривую перемещения операции замыкания путем подгонки кривой к первой и второй паре значений.
6. Система по п. 3, в которой операция выключателя представляет собой операцию размыкания и значение первого момента времени из значений времени соответствует моменту, когда замкнутый второй переключатель размыкается, а значение второго момента времени из значений времени соответствует моменту, когда разомкнутый первый переключатель замыкается.
7. Система по п. 6, в которой процессор выполнен с возможностью определять: первую пару значений, включающую в себя расстояние перемещения контактов от полностью замкнутого положения до момента, когда замкнутый первый переключатель разомкнется, и значение первого момента времени, а также вторую пару значений, включающую в себя расстояние перемещения контактов от полностью замкнутого положения до момента, когда разомкнутый первый переключатель замкнется, и значение второго момента времени, и определять кривую перемещения операции выключения путем подгонки кривой к первой и второй паре значений.
8. Система по п. 7, в которой процессор выполнен с возможностью путем экстраполяции продолжать кривую перемещения операции замыкания до полностью замкнутого и разомкнутого положения контактов путем оценивания участка кривой перемещения первой гладкой функцией как проходящего от указанной первой точки до первой точки касания во временной точке, в которой получена команда замыкания, и оценивая второй гладкой функцией участка кривой перемещения, проходящего от второй точки до второй точки касания в полностью замкнутом положении.
9. Система по п. 1, в которой процессор представляет собой физический компонент устройства мониторинга в режиме реального времени, объединенный с выключателем.
10. Система по п. 1, в которой процессор представляет собой физический компонент вычислительного устройства, находящегося на расстоянии от выключателя.
11. Система по п. 1, в которой процессор выполнен с возможностью, исходя из определенной кривой перемещения, вычислять по меньшей мере одно из следующих значений: время реакции, скорость контактов, время срабатывания механизма или износ прерывателя.
12. Система по п. 1, в которой оцененная кривая перемещения является непрерывной и дифференцируемой.
13. Способ, характеризующийся тем, что:
посредством процессора определяют кривую перемещения по меньшей мере одной из следующих операций для контактов прерывателя автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, исходя из одного или нескольких заданных расстояний перемещения контактов относительно друг друга и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями во время работы выключателя, при этом переключатели прикреплены к контактам, так что переходят между замкнутым и разомкнутым состоянием, когда контакты перемещаются между замкнутым и разомкнутым положениями.
14. Способ по п. 13, в котором дополнительно:
определяют кривую перемещения, исходя из первой пары значений, включающей в себя расстояние перемещения контактов от полностью разомкнутого положения до момента, когда замкнутый первый переключатель разомкнется, и значение первого момента времени из значений времени, соответствующее моменту, когда замкнутый первый переключатель размыкается, и второй пары значений, включающей в себя расстояние перемещения контактов от полностью разомкнутого положения до момента, когда разомкнутый второй переключатель замкнется, и значение второго момента времени из значений времени, соответствующее моменту, когда разомкнутый второй переключатель замыкается; и путем экстраполяции продолжают кривую перемещения до полностью замкнутого и разомкнутого положения контактов.
15. Способ по п. 13, в котором дополнительно:
определяют кривую перемещения, исходя из первой пары значений, включающей в себя расстояние перемещения контактов от полностью замкнутого положения до момента, когда замкнутый второй переключатель разомкнется, и значение первого момента времени из значений времени, соответствующее моменту, когда замкнутый второй переключатель размыкается, и второй пары значений, включающей в себя расстояние перемещения контактов от полностью замкнутого положения до момента, когда разомкнутый первый переключатель замкнется, и значение второго момента времени из значений времени, соответствующее моменту, когда разомкнутый первый переключатель замыкается; и путем экстраполяции продолжают кривую перемещения до полностью замкнутого и разомкнутого положения контактов.
16. Способ по п. 13, в котором дополнительно:
определяют кривую перемещения для сочетания операций размыкания и замыкания путем сочетания кривых перемещения для операций размыкания и операций замыкания.
17. Способ по п. 13, в котором дополнительно:
определяют кривую перемещения путем отображения расстояний перемещения и значений времени состояний переключателя как функцию времени.
18. Способ по п. 13, в котором дополнительно:
исходя из определенной кривой перемещения, вычисляют по меньшей мере один из следующих параметров: время реакции, скорость контактов, время срабатывания механизма и износ прерывателя.
19. Способ по п. 18, в котором параметры вычисляют с помощью устройства мониторинга текущего состояния в режиме реального времени, объединенного с выключателем.
20. Способ по п. 18, в котором параметры вычисляют с помощью вычислительного устройства, расположенного на расстоянии от выключателя.
21. Способ по п. 13, в котором определенная кривая перемещения является непрерывной и дифференцируемой.
22. Способ, характеризующийся тем, что:
отображают кривую перемещения по меньшей мере одной из следующих операций для контактов прерывателя автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, при этом кривую перемещения определяют, исходя из одного или нескольких заданных расстояний перемещения контактов относительно друг друга и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями, при этом переключатели прикреплены к контактам, так что они переходят между замкнутым и разомкнутым состоянием, когда контакты перемещаются между замкнутым и разомкнутым положениями.
23. Способ, характеризующийся тем, что:
посредством процессора определяют один или несколько параметров для автоматического выключателя высоковольтной цепи, исходя из кривой перемещения, по меньшей мере одной из следующих операций для контактов прерывателя автоматического выключателя высоковольтной цепи: замыкание, размыкание или сочетание замыкания и размыкания, при этом кривую перемещения определяют, исходя из одного или нескольких заданных расстояний перемещения контактов относительно друг друга и одного или нескольких значений времени, соответствующих переходам состояний переключателей между замкнутым и разомкнутым состояниями, при этом переключатели прикреплены к контактам, так что они переходят между замкнутым и разомкнутым состоянием, когда контакты перемещаются между замкнутым и разомкнутым положениями.
| US 5638296 A, 10.06.1997 | |||
| WO 00/39823 A1, 06.07.2000 | |||
| Способ обработки целлюлозных материалов, с целью тонкого измельчения или переведения в коллоидальный раствор | 1923 |
|
SU2005A1 |
| Приспособление для облегчения наблюдения мениска жидкостей в лабораторных сосудах | 1934 |
|
SU44712A1 |

